Область техники, к которой относится изобретение
Настоящая заявка относится, в общем, к технической области обработки ультразвуковых изображений и, в частности, к способу обработки данных, аппаратному устройству, устройству и носителю информации.
Уровень техники
С развитием науки и техники технология ультразвуковой визуализации широко используется в различных областях. В предшествующем уровне техники после получения исходного ультразвукового эхо-сигнала необходимо, как правило, выполнять восстановление изображения и обработку изображения, чтобы получить некоторые параметры, связанные с обнаруженным объектом, такие как скорость, направление и т.д., и оценить состояние обнаруженного объекта в соответствии с этими связанными с ним параметрами.
Однако, точность оценки состояния обнаруженного объекта в предшествующем уровне техники является относительно низкой, что не может в полной мере удовлетворить требования к точности ультразвукового обнаружения обнаруженного объекта. Поэтому то, как точно оценить состояние обнаруженного объекта, является технической задачей, требующей срочного решения.
Раскрытие сущности изобретения
Настоящая заявка обеспечивает способ обработки данных, аппаратное устройство, устройство и носитель информации для устранения недостатков, связанных с низкой точностью оценки в предшествующем уровне техники.
Первый аспект настоящей заявки обеспечивает способ обработки данных, включающий в себя:
получение первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметр, связанный с обнаруженным объектом;
выполнение извлечения признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и
выполнение соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных.
Второй аспект настоящей заявки обеспечивает аппаратное устройство обработки данных, включающее в себя:
первый модуль обработки, выполненный с возможностью получения первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметр, связанный с обнаруженным объектом;
второй модуль обработки, выполненный с возможностью выполнения извлечения признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и
третий модуль обработки, выполненный с возможностью выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных.
Третий аспект настоящей заявки обеспечивает компьютерное устройство, включающее в себя: по меньшей мере один процессор и память;
где в памяти хранится компьютерная программа; и по меньшей мере один процессор исполняет компьютерную программу, хранящуюся в памяти, для реализации способа, предусмотренного в первом аспекте.
Четвертый аспект настоящей заявки обеспечивает машиночитаемый носитель информации, хранящий компьютерную программу, при этом способ, предусмотренный в первом аспекте, реализуется при исполнении компьютерной программы.
Согласно способу обработки данных, аппаратному устройству, устройству и носителю информации, обеспечиваемым в настоящей заявке, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дополнительного выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных можно значительно повысить точность оценки состояния обнаруженного объекта.
Краткое описание чертежей
Для того чтобы более четко описать техническое решение в вариантах осуществления настоящей заявки или предшествующем уровне техники, далее будут кратко представлены чертежи, которые необходимо использовать при описании вариантов осуществления или предшествующего уровня техники. Очевидно, что чертежи в последующем описании являются частью вариантов осуществления настоящей заявки, и специалисты в данной области техники могут получить другие чертежи на основе этих чертежей без приложения творческих усилий.
Фиг. 1 - схематичная структурная схема системы обработки данных, к которой применим вариант осуществления настоящей заявки;
Фиг. 2 - блок-схема последовательности операций способа обработки данных, предусмотренного вариантом осуществления настоящей заявки;
Фиг. 3 - блок-схема последовательности операций способа обработки данных, предусмотренного другим вариантом осуществления настоящей заявки;
Фиг. 4 - схематичная структурная схема аппаратного устройства обработки данных, предусмотренного вариантом осуществления настоящей заявки;
Фиг. 5 - схематичная структурная схема системы обработки данных, предусмотренной другим вариантом осуществления настоящей заявки; и
Фиг. 6 - схематичная структурная схема компьютерного устройства, предусмотренного вариантом осуществления настоящей заявки.
На вышеупомянутых чертежах показаны конкретные варианты осуществления настоящей заявки, которые будут описаны более подробно позже. Эти чертежи и текстовые описания никоим образом не предназначены для ограничения объема концепции настоящего раскрытия, и предназначены для пояснения концепции настоящей заявки специалистам в данной области техники путем ссылки на конкретные варианты осуществления.
Осуществление изобретения
Для того чтобы сделать цель, техническое решение и преимущества вариантов осуществления настоящей заявки более понятными, техническое решение в вариантах осуществления настоящей заявки будет ясно и полностью описано ниже со ссылкой на чертежи в вариантах осуществления настоящей заявки. Очевидно, что описанные варианты осуществления являются частью вариантов осуществления настоящей заявки, и не всеми из них. Все другие варианты осуществления, полученные специалистами в данной области техники на основе вариантов осуществления в настоящей заявке без приложения творческого труда, подпадают под объем охраны настоящей заявки.
Сначала будут пояснены термины, используемые в настоящей заявке.
Восстановление изображения относится к технологии получения информации о форме трехмерного объекта посредством цифровой обработки данных, измеренных вне объекта. В радиологическом медицинском оборудовании для отображения изображений различных частей человеческого тела может использоваться технология восстановления изображения, то есть технология компьютерной томографии или сокращенно технология КТ. Технологию восстановления изображения можно также применять в других областях.
Обработка изображения относится к технологии анализа изображения с помощью компьютера для достижения желаемого результата. В вариантах осуществления настоящей заявки она относится к выполнению постобработки изображения и извлечения сигнала над восстановленным результирующим изображением для повышения четкости изображения, выделения характеристик изображения и получения параметров, связанных с обнаруженным объектом, таких как скорость, направление, ускорение, деформация, скорость деформации, модуль упругости и другие количественные параметры обнаруживаемого объекта и др.
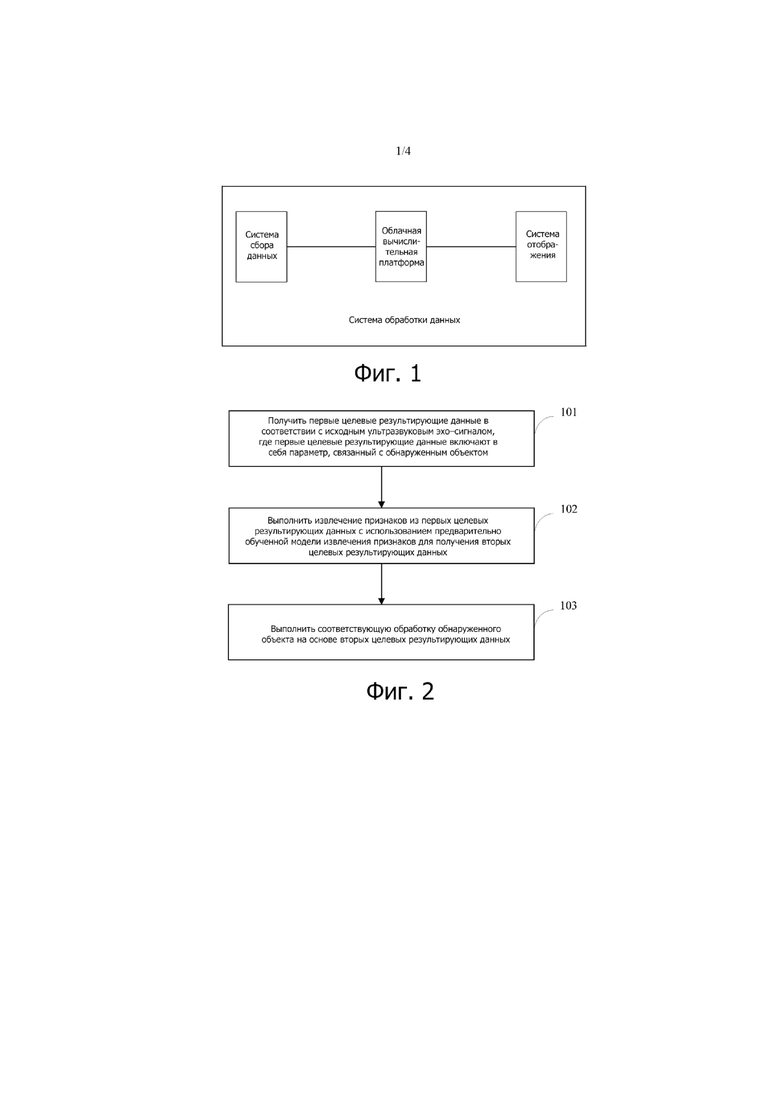
Способ обработки данных, предусмотренный вариантами осуществления настоящей заявки, применим к следующей системе обработки данных. На Фиг. 1 показана структурная схема системы обработки данных, к которой применим вариант осуществления настоящей заявки. Система обработки данных включает в себя облачную вычислительную платформу, систему сбора данных и систему отображения. Система сбора данных отвечает за сбор данных, подлежащих обработке, где обрабатываемые данные могут включать в себя собранный исходный ультразвуковой эхо-сигнал. Облачная вычислительная платформа отвечает за выполнение соответствующей обработки над данными, подлежащими обработке, для получения требуемого результата. Система отображения отвечает за отображение соответствующих данных или результата, полученных в ходе обработки облачной вычислительной платформы. Система обработки данных может также включать в себя локальную вычислительную платформу для совместного использования части задач обработки облачной вычислительной платформы.
Термины «первый», «второй» и т.д. используются только в описательных целях, и их не следует понимать как указывающие или подразумевающие относительную важность или как косвенно указывающие количество указанных технических признаков. В описании следующих вариантов осуществления термин «многочисленный» относится к двум или более чем к двум, если не указано иное.
Следующие конкретные варианты осуществления могут быть объединены друг с другом, и в некоторых вариантах осуществления одинаковые или аналогичные концепции или процессы могут не повторяться. Варианты осуществления настоящего изобретения будут описаны ниже со ссылкой на чертежи.
Вариант 1 осуществления
Данный вариант осуществления обеспечивает способ обработки данных для обработки ультразвукового эхо-сигнала с целью получения необходимых результирующих данных. Объектом исполнения данного варианта осуществления является аппаратное устройство обработки данных, которое может быть установлено на облачной вычислительной платформе. Кроме того, аппаратное устройство может быть частично установлено на локальной вычислительной платформе, и другие части могут быть установлены на облачной вычислительной платформе.
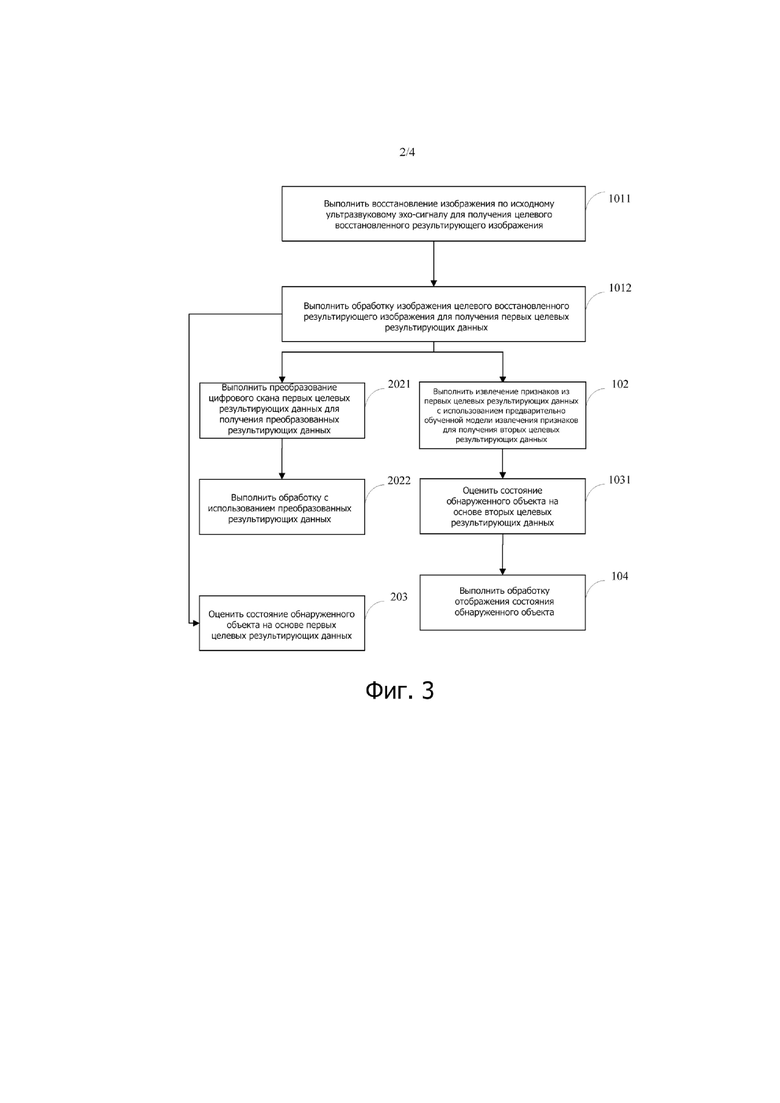
На Фиг. 2 показана блок-схема последовательности операций способа обработки данных, предусмотренная данным вариантом осуществления, и способ включает в себя:
этап 101: получение первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметр, связанный с обнаруженным объектом.
В частности, исходный ультразвуковой эхо-сигнал может быть получен из терминала сбора данных или может быть собран и сохранен заранее, например, сохранен на облачной вычислительной платформе, или сохранен на локальной вычислительной платформе и отправлен на облачную вычислительную платформу в случае, когда это необходимо для обработки, или обработан локальной вычислительной платформой и т.д., и конкретный способ получения не ограничен. После получения исходного ультразвукового эхо-сигнала первые целевые результирующие данные могут быть получены в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметры, связанные с обнаруженным объектом, такие как связанные с ним параметры, представляющие скорость движения (например, скорость кровотока), направление движения (например, направление кровотока), упругость (например, деформация, скорость деформации и т.д.) обнаруженного объекта, которые могут конкретно включать в себя смещение, скорость, ускорение, деформацию, скорость деформации, модуль упругости и другие количественные параметры и т.д. Первые целевые результирующие данные могут также включать в себя параметры, относящиеся к характеристикам изображения, такие как контрастность, характеристика текстуры и другие количественные параметры, и могут также включать в себя такую информацию, как характеристики распределения рассеивающих объектов, плотность рассеивающих объектов и размер рассеивающих объектов. В данном случае особых ограничений нет. Первые целевые результирующие данные могут находиться в виде данных или в виде изображения, такого как псевдоцветное изображение.
Обнаруженный объект может представлять собой ткани человека или животных, такие как печень, почка, селезенка, или другие объекты в воздушной среде или геологическом разрезе, которые могут быть определены в соответствии с фактическими потребностями и не ограничены в варианте осуществления настоящей заявки.
При необходимости обработка, такая как восстановление изображения и обработка изображения, может выполняться над исходным ультразвуковым эхо-сигналом для получения первых целевых результирующих данных. Конкретный способ обработки может представлять собой предшествующий уровень техники, который не ограничивается данным вариантом осуществления.
Этап 102: выполнение извлечения признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных.
В частности, предварительно обученная модель извлечения признаков может быть моделью машинного обучения или моделью искусственного интеллекта, где обучение модели извлечения признаков может быть выполнено с использованием большого количества предварительно собранных обучающих данных и размеченных данных, полученных в результате разметки обучающих данных. Конкретный процесс обучения согласуется с процессом обучения существующей модели нейронной сети, который в данном документе не будет повторяться. Типы параметров, включенных в обучающие данные, согласуются с параметрами в первых целевых результирующих данных, таких как различные скорости кровотока, направления кровотока и информация об упругости. Размеченными данными могут быть признаки текстуры, однородность и т.д., или размеченными данными могут также представлять собой состояние обнаруженного объекта, соответствующего обучающим данным, например то, является ли это состояние фиброзом печени, циррозом и его конкретной стадией, является ли это состояние жировой дистрофией печени и ее конкретной стадией, является ли это состояние доброкачественной или злокачественной опухолью. Детали могут быть установлены в соответствии с фактическими потребностями.
Обученная модель извлечения признаков может выполнять извлечение признаков и предсказание результата на основе первых целевых результирующих данных для получения вторых целевых результирующих данных, где вторые целевые результирующие данные могут представлять собой признак текстуры изображения, однородность и другие признаки обнаруженного объекта, а также могут представлять собой признак состояния обнаруженного объекта, полученный после анализа признаков и взвешивания этих признаков, например то, является ли обнаруженный объект фиброзом печени, циррозом и его конкретной стадией, жировой дистрофией печени и ее конкретной стадией, доброкачественной или злокачественной опухолью и т.д. В данном документе характеристики состояния, выдаваемые моделью, могут быть метками, соответствующими различным состояниям, например, 0 означает «нормальное», 1 означает «жировая дистрофия печени» и т.д., и детализация может быть установлена в соответствии с фактическими потребностями, которые не ограничены в данном варианте осуществления.
При необходимости по меньшей мере две модели, такие как модель машинного обучения и модель искусственного интеллекта, могут использоваться параллельно для извлечения признаков, и результаты каждой модели синтезируются для получения вторых целевых результирующих данных. Например, для извлечения признаков существуют три разные модели в том случае, если получены признаки состояния обнаруженного объекта, где результаты двух моделей равны «1», и результат одной модели равен «0», результат должен быть равен «1» по принципу «подчинения меньшинства большинству», однако это лишь примерное описание, а не ограничение.
Этап 103: выполнение соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных.
В частности, после получения вторых целевых результирующих данных соответствующая обработка может выполняться над обнаруженным объектом на основе вторых целевых результирующих данных. Например, выполняется оценка состояния обнаруженного объекта на основе признака состояния обнаруженного объекта. В качестве другого примера, выполняется отображение состояния обнаруженного объекта или отображение вторых целевых результирующих данных обнаруженного объекта и т.д. Вторые целевые результирующие данные могут помочь соответствующему лицу понять состояние обнаруженного объекта. Например, могут помочь помощь врачу в постановке диагноза и т.д.
При необходимости способ, предусмотренный в данном варианте осуществления, может исполняться облачной вычислительной платформой, или исполняться локальной вычислительной платформой, или частично исполняться локальной вычислительной платформой и частично исполняться облачной вычислительной платформой, и детали могут быть установлены в соответствии с фактическими потребностями, которые не ограничены в данном варианте осуществления.
Согласно способу обработки данных, предусмотренному в данном варианте осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных, дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных и объединения обнаруженного объекта с нейронной сетью можно значительно повысить точность оценки состояния обнаруженного объекта.
Вариант 2 осуществления
Данный вариант осуществления дополнительно дополняет способ, представленный в варианте 1 осуществления.
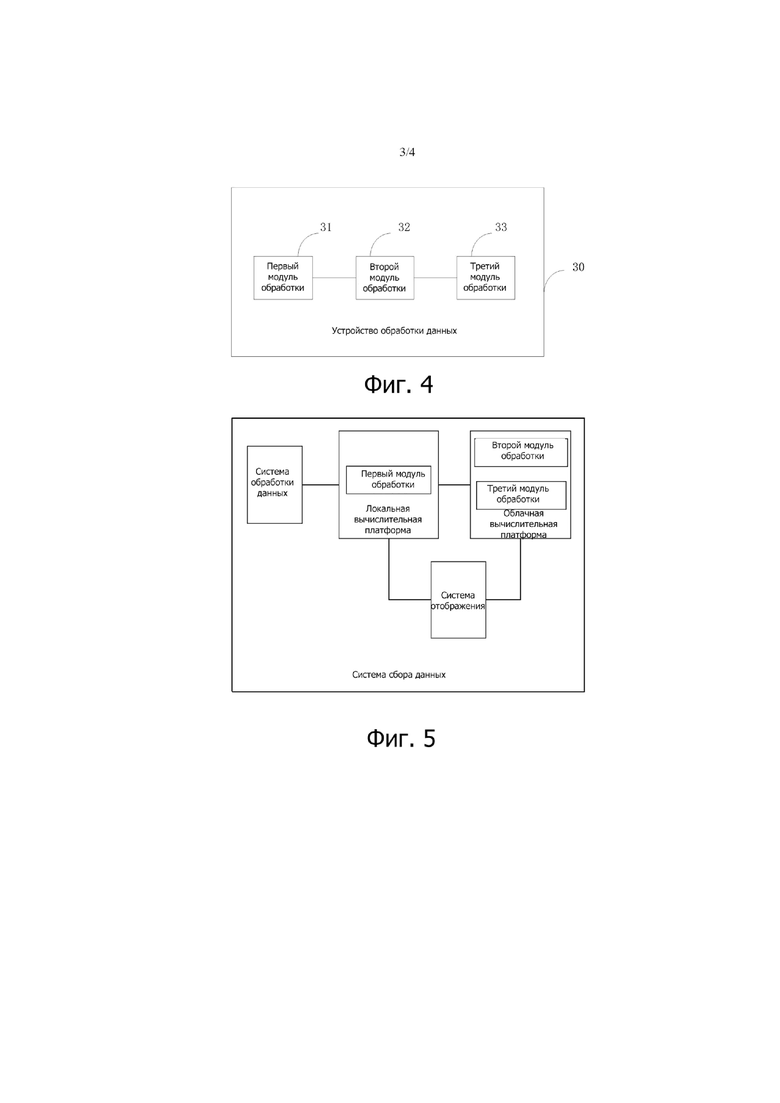
На Фиг. 3 показана блок-схема последовательности операций способа обработки данных, предусмотренного данным вариантом осуществления.
В качестве реализуемого способа на основе вышеупомянутого варианта 1 осуществления, при необходимости этап 101 специально включает в себя:
этап 1011: выполнение восстановления изображения над исходным ультразвуковым эхо-сигналом для получения целевого восстановленного результирующего изображения.
В частности, после получения исходного ультразвукового эхо-сигнала необходимо выполнить восстановление изображения над исходным ультразвуковым эхо-сигналом, чтобы получить целевое восстановленное результирующее изображение, такое как ультразвуковое изображение, ультразвуковое изображение B-режима и т.д. Целевое восстановленное результирующее изображение может быть в виде радиочастоты, огибающей, шкалы серого и т.д.
Этап 1012: выполнение обработки изображения над целевым восстановленным результирующим изображением для получения первых целевых результирующих данных.
В частности, после получения целевого восстановленного результирующего изображения необходимо выполнить обработку изображения целевого восстановленного результирующего изображения, чтобы повысить четкость изображения и выделить признаки изображения. Например, выполняются коррекция оттенков серого, расширение и сжатие оттенков серого, γ-коррекция, выравнивание гистограммы, электронное усиление, интерполяционная обработка и т.д. Наконец, получается параметр, связанный с обнаруженным объектом, то есть первые целевые результирующие данные. Конкретный способ обработки изображения может быть установлен в соответствии с фактическими потребностями, которые в данном документе не ограничиваются.
При необходимости этап 1011 может специально включать в себя:
этап 10111: выполнение восстановления изображения над исходным ультразвуковым эхо-сигналом с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, где алгоритм восстановления изображения на основе пространственных точек представляет собой алгоритм восстановления изображения, совместимый с несколькими типами зондов; и выбор первого восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения.
При необходимости выполнение восстановления изображения над исходным ультразвуковым эхо-сигналом с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения включает в себя:
выполнение, в соответствии с предварительно настроенными параметрами зонда и параметром отображения, восстановления изображения над исходным ультразвуковым эхо-сигналом с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, где параметры зонда включают в себя идентификатор зонда, нулевую точку в декартовой системе координат зонда и первую координату каждого элемента массива зонда, и параметр отображения включает в себя вторую координату первого восстановленного результирующего изображения.
В частности, алгоритм восстановления изображения на основе пространственных точек включает в себя: заданные параметры зонда, то есть зонд определяется в унифицированном формате в соответствии с физическими параметрами зонда для формирования таблицы индексов параметров зонда, где таблица индексов параметров зонда состоит из идентификационного кода модели зонда (то есть идентификатора зонда), нулевой точки в декартовой системе координат зонда и координаты каждого элемента зонда (то есть первой координаты), тип используемого в настоящее время зонда может быть идентифицирован идентификационным кодом, и параметры зонда могут быть найдены в таблице индексов параметров зонда. При необходимости для управления параметрами зонда можно установить модуль определения зонда. Кроме того, необходимо также определить параметр отображения восстановленного изображения, разные параметры отображения могут быть определены для разных типов зондов, и восстановление изображения выполняется в соответствии с параметром отображения, чтобы быть совместимым с несколькими типами зондов. Параметр отображения состоит из определения диапазона координат, координат (Xi, Yi, Zi) или размера пикселя (ΔXi, ΔYi, ΔZi) целевого изображения (то есть целевого восстановленного результирующего изображения). При необходимости для управления параметром отображения может быть установлен модуль определения изображения. Модуль идентификации зонда может быть также установлен на идентификацию зонда. Типы зондов включают в себя линейную решетку, выпуклую решетку, фазированную решетку, двумерную поверхностную решетку и другие типы.
Из-за различных сценариев применения ультразвуковых зондов разные типы зондов имеют разные формы, размеры и частотные характеристики. В общем, зонд состоит из нескольких элементов массива, и расположение и размер элементов массива влияют на алгоритм восстановления изображения.
Во время восстановления изображения путь L(i) распространения ультразвука в любой точке P(i) (относится к точке, соответствующей координатам (Xi, Yi, Zi) на приведенном выше целевом изображении) в пространстве: L(i)=L(t)+P(Xi,Yi,Zi)-P(Xt,Yt,Zt), t=1,2,3…n, n≥1, где n - количество элементов массива зонда. Кроме того, реализуется адаптивное объединение лучей (под адаптацией в данном документе подразумевается работа в соответствии с различными требованиями к координатам. Конкретным способом может быть существующая технология, такая как наложение задержки и т.д.). Среди них нулевая точка в декартовой системе координат зонда представляет собой среднее позицию зонда (X0, Y0, Z0), координатами каждого элемента зонда являются (Xt, Yt, Zt), и центральной плоскостью плоскости формирования изображения зонда является плоскость XZ, плоскостью, которая перпендикулярна плоскости формирования изображения зонда и параллельна касательной плоскости в нулевом положении зонда, является плоскость XY.
Возьмем в качестве примера выпуклый матричный зонд (не ограничиваясь выпуклым матричным зондом): позиция, центральная частота, полоса пропускания и другие параметры выпуклого матричного зонда записываются в модуль определения зонда; конкретный код зонда программируется с использованием нескольких штырьков выпуклого матричного зонда, модуль идентификации зонда может идентифицировать код зонда, когда зонд подключен к системе обработки данных, и может дополнительно находить соответствующие параметры в модуле определения зонда; режим отображения изображения (то есть параметр отображения) определяется в модуле определения изображения, и восстановление изображения выполняется в соответствии с таким режимом. Этот способ восстановления изображения подходит для любого зонда, то есть он реализует восстановление ультразвукового изображения, совместимую с зондами нескольких типов, тем самым повышая гибкость и эффективность восстановления изображения.
В некоторых вариантах осуществления этап 1012 может специально включать в себя:
этап 10121: выполнение постобработки изображения и извлечения сигнала над восстановленным результирующим изображением для получения первых целевых результирующих данных, где первые целевые результирующие данные включают в себя по меньшей мере одно из смещения, скорости, ускорения, деформации, скорость деформации, модуля упругости, контрастности, признаки текстуры, признаки распределения рассеивающих объектов, плотности рассеивающих объектов и размер рассеивающих объектов.
В частности, после того, как целевое восстановленное результирующее изображение получено, постобработка изображения и извлечение сигнала выполняются над целевым восстановленным результирующим изображением для получения первых целевых результирующих данных, таких как допплеровский анализ, вычисление упругости и т.д. Если приведенное выше алгоритм восстановления изображения, совместимый с зондами нескольких типов, используется при восстановлении изображения, обработка изображений также может быть совместима с зондами нескольких типов, и по-прежнему используются модуль определения зонда, модуль идентификации зонда и модуль определения изображения. Модуль идентификации зонда идентифицирует тип используемого в настоящее время зонда путем назначения идентификационного кода зонда и выполняет поиск параметров зонда в таблице индексов; параметр отображения определяется в модуле определения изображения, и восстановление изображения выполняется на основе этого параметра; и модуль определения изображения выполняет обработку изображения для получения результата обработки данных (то есть первых целевых результирующих данных), который не зависит от типа зонда, тем самым реализуя совместимость нескольких типов зондов.
Среди них постобработка изображения и выделение сигнала представляют собой процесс обработки изображения, в данном варианте осуществления обработка изображения включает в себя весь процесс постобработки изображения и выделение сигнала. Например, когда выпуклая матрица используется для обработки доплеровского сигнала (способ выделения сигнала на этапе обработки изображения), если сигнал, полученный с использованием традиционного алгоритма восстановления изображения, проходит вдоль направления излучения выпуклой матрицы (веерный луч), когда выполняется извлечение допплеровского сигнала, полученное направление кровотока также совпадает с направлением излучения выпуклой матрицы. Если требуется распределение скорости кровотока в горизонтальном или вертикальном направлении в декартовой системе координат, то его можно получить, только получив составляющую по соответствующему углу. Между тем, применяя способ обработки изображения в варианте осуществления настоящей заявки, можно напрямую получить распределение скорости кровотока в горизонтальном или вертикальном направлении в декартовой системе координат (в частности, распределение можно получить, используя автокорреляцию, кратковременное преобразование Фурье и другие существующие технологии на основе первых целевых результирующих данных). Аналогичным образом, способ также применим к матричным элементам других типов зондов, таких как фазированная решетка и поверхностная решетка.
При необходимости в некоторых вариантах осуществления выполнение восстановления изображения над исходным ультразвуковым эхо-сигналом для получения целевого восстановленного результирующего изображения включает в себя:
на этапе 2011, для каждого зонда, выполнение, в соответствии с алгоритмом восстановления изображения, соответствующим типу зонда, восстановления изображения над исходным ультразвуковым эхо-сигналом для получения второго восстановленного результирующего изображения.
В частности, восстановление изображения выполняется над каждым зондом согласно соответствующему алгоритму восстановления изображения, выполненному с возможностью получения второго восстановленного результирующего изображения.
В данном документе предоставляется решение относительно того, когда алгоритмы восстановления изображения нескольких типов зондов несовместимы, восстановление изображения для каждого зонда выполняется в соответствии с соответствующим сконфигурированным алгоритмом восстановления изображения, то есть для зондов разных типов может потребоваться использовать разные алгоритмов восстановления изображения, соответствующий алгоритм восстановления изображения может быть выполнен с возможностью соответствующего типа зонда, и алгоритм восстановления изображения, соответствующий зонду, определяется в соответствии с типом зонда для выполнения восстановления изображения после использования различных типов зондов для сбора данных относительно исходного ультразвукового эхо-сигнала. Конкретным способом восстановления является существующая технология, которая в данном документе повторяться не будет.
Этап 2012: выполнение обработки в виде пространственной интерполяции над вторым восстановленным результирующим изображением для получения третьего восстановленного результирующего изображения, и выбор третьего восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения.
В частности, чтобы получить целевое восстановленное результирующее изображение, совместимое с различными типами зондов, необходимо выполнить обработку с использованием пространственной интерполяции над вторым восстановленным результирующим изображением для получения третьего восстановленного результирующего изображения, которое может использоваться в качестве целевого восстановленного результирующего изображения.
Третье восстановленное результирующее изображение, полученное посредством обработки в виде пространственной интерполяции, по существу эквивалентно первому изображению результата восстановления, полученному с помощью вышеупомянутого алгоритма восстановления изображения на основе пространственных точек. Разница состоит в том, что эффекты немного отличаются в том случае, когда первое восстановленное результирующее изображение получается путем прямого восстановления, и третье восстановленное результирующее изображение получается путем интерполяции результата традиционного восстановления. Обработка в виде пространственной интерполяции может быть реализована различными способами, такими как линейная интерполяция, нелинейная интерполяция и т.д.
При необходимости после выполнения обработки изображения над целевым восстановленным результирующим изображением для получения первых целевых результирующих данных способ может дополнительно включать в себя:
этап 2021: выполнение преобразования цифрового скана над первыми целевыми результирующими данными для получения преобразованных результирующих данных
Этап 2022: выполнение обработки отображения над преобразованными результирующими данными.
В частности, полученные первые целевые результирующие данные могут быть также использованы для помощи в диагностике и могут иметь определенное эталонное значение. Таким образом, могут отображаться первые целевые результирующие данные, однако они должны отображаться после преобразования цифрового скана. Поэтому необходимо выполнить преобразование цифрового скана над первыми целевыми результирующими данными, чтобы получить преобразованные результирующие данные, и затем выполнить обработку отображения над преобразованными результирующими данными.
При необходимости в некоторых вариантах осуществления этап 103 может специально включать в себя:
этап 1031: оценка состояния обнаруженного объекта на основе вторых целевых результирующих данных.
Например, оценкой, в соответствии со вторыми целевых результирующих данных, представляет собой то, является ли обнаруженный объект фиброзом печени, циррозом и его конкретной стадией, жировой дистрофией печени и ее конкретной стадией, доброкачественной или злокачественной опухолью и т.д.
При необходимости способ может дополнительно включать в себя:
этап 104: выполнение обработки отображения над состоянием обнаруженного объекта.
При необходимости в некоторых вариантах осуществления после получения первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом способ дополнительно включает в себя:
этап 203: оценка состояния обнаруженного объекта на основе первых целевых результирующих данных.
Полученные первые целевые результирующие данные также могут использоваться для помощи в диагностике и иметь определенное эталонное значение, поэтому состояние обнаруженного объекта можно оценить на основе первых целевых результирующих данных. Например, можно установить пороговые значения различных параметров и уровни параметров, где разные уровни соответствуют разным состояниям обнаруженного объекта и т.д., и в данном документе подробности повторяться не будут.
При необходимости в некоторых вариантах осуществления способ в варианте осуществления настоящей заявки исполняется облачной вычислительной платформой.
При необходимости в других вариантах осуществления локальная вычислительная платформа получает первые целевые результирующие данные в соответствии с исходным ультразвуковым эхо-сигналом и отправляет первые целевые результирующие данные на облачную вычислительную платформу; облачная вычислительная платформа выполняет извлечение признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и выполняет соответствующую обработку обнаруженного объекта над вторыми целевыми результирующими данными. То есть этап 101 выполняется локальной вычислительной платформой, и этапы 102-103 обрабатываются облачной вычислительной платформой.
Согласно способу обработки данных, предусмотренному в данном варианте осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных можно повысить точность оценки состояния обнаруженного объекта. Кроме того, за счет выполнения восстановления изображения с использованием алгоритма восстановления изображения на основе пространственных точек, который может быть совместим с несколькими типами зондов, можно повысить гибкость и эффективность восстановления изображения. Кроме того, за счет выполнения обработки изображения на основе целевого восстановленного результирующего изображения, совместимого с несколькими типами зондов, можно повысить точность соответствующего параметра обнаруженного объекта. Как полученные первые целевые результирующие данные, так и вторые целевые результирующие данные могут использоваться для помощи соответствующему лицу в диагностике обнаруженного объекта, тем самым повышая эффективность диагностики.
Вариант 3 осуществления
Данный вариант осуществления обеспечивает аппаратное устройство обработки данных для выполнения способа в вышеупомянутом варианте 1 осуществления.
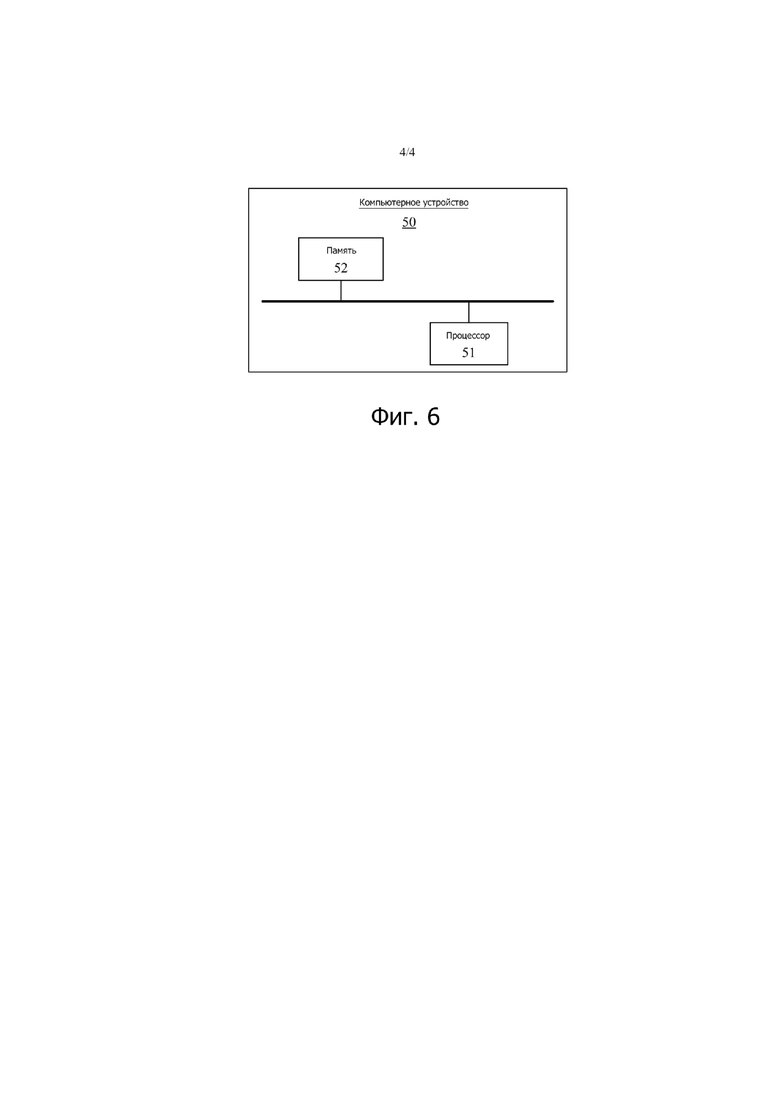
На Фиг. 4 показана структурная схема аппаратного устройства обработки данных, предусмотренного данным вариантом осуществления. Аппаратное устройство 30 обработки данных включает в себя первый модуль 31 обработки, второй модуль 32 обработки и третий модуль 33 обработки.
Среди них первый модуль 31 обработки выполнен с возможностью получения первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметр, связанный с обнаруженным объектом; второй модуль 32 обработки выполнен с возможностью выполнения извлечения признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и третий модуль 33 обработки выполнен с возможностью выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных.
Что касается аппаратного устройства, предусмотренного в данном варианте осуществления, конкретные способы выполнения операций каждым модулем были подробно описаны в варианте осуществления, относящемся к способу, и в данном документе подробное описание не приводится.
Согласно аппаратному устройству обработки данных, предусмотренному в данном варианте осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных, можно значительно повысить точность оценки состояния обнаруженного объекта.
Вариант 4 осуществления
Данный вариант осуществления дополнительно дополняет аппаратное устройство, представленное в вышеупомянутом варианте 3 осуществления.
В качестве реализуемого способа, на основе вышеупомянутого варианта 3 осуществления, при необходимости первый модуль обработки специально выполнен с возможностью:
выполнения восстановления изображения над исходным ультразвуковым эхо-сигналом для получения целевого восстановленного результирующего изображения; и
выполнения обработки изображения над целевым восстановленным результирующим изображением для получения первых целевых результирующих данных.
При необходимости в некоторых вариантах осуществления первый модуль обработки специально выполнен с возможностью:
выполнения восстановления изображения над исходным ультразвуковым эхо-сигналом с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, где алгоритм восстановления изображения на основе пространственных точек представляет собой алгоритм восстановления изображения, совместимый с несколькими типами зондов; и
выбора первого восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения.
При необходимости в некоторых вариантах осуществления первый модуль обработки специально выполнен с возможностью:
выполнения, в соответствии с предварительно настроенными параметрами зонда и параметром отображения, восстановления изображения над исходным ультразвуковым эхо-сигналом с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения; где параметры зонда включают в себя идентификатор зонда, нулевую точку в декартовой системе координат зонда и первую координату каждого элемента массива зонда, и параметр отображения включает в себя вторую координату первого восстановленного результирующего изображения.
При необходимости в некоторых вариантах осуществления первый модуль обработки специально выполнен с возможностью:
выполнения постобработки изображения и извлечения сигнала над восстановленным результирующим изображением для получения первых целевых результирующих данных, где первые целевые результирующие данные включают в себя по меньшей мере одно из: смещения, скорости, ускорения, деформации, скорости деформации, модуля упругости, контрастности, признаки текстуры, признаки распределения рассеивающих объектов, плотности рассеивающих объектов и размера рассеивающих объектов.
При необходимости в некоторых вариантах осуществления первый модуль обработки специально выполнен с возможностью:
выполнения, на основе алгоритма восстановления изображения, который не совместим с несколькими типами зондов, восстановления изображения над исходным ультразвуковым эхо-сигналом для получения второго восстановленного результирующего изображения;
выполнения обработки в виде пространственной интерполяции над вторым восстановленным результирующим изображением для получения третьего восстановленного результирующего изображения; и
выбора третьего восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения.
При необходимости первый модуль обработки дополнительно выполнен с возможностью:
выполнения преобразования цифрового скана над первыми целевыми результирующими данными для получения преобразованных результирующих данных; и
выполнения обработки отображения над преобразованными результирующими данными.
В качестве еще одного реализуемого способа, на основе вышеупомянутого варианта 3 осуществления, при необходимости третий модуль обработки специально выполнен с возможностью:
оценки состояния обнаруженного объекта на основе вторых целевых результирующих данных.
При необходимости в некоторых вариантах осуществления третий модуль обработки дополнительно выполнен с возможностью:
выполнения обработки отображения над состоянием обнаруженного объекта.
В качестве еще одного реализуемого способа, на основе вышеупомянутого варианта 3 осуществления, при необходимости первый модуль обработки дополнительно выполнен с возможностью оценки состояния обнаруженного объекта на основе первых целевых результирующих данных.
Что касается аппаратного устройства, предусмотренного в данном варианте осуществления, конкретные способы выполнения операций каждым модулем были подробно описаны в варианте осуществления, относящемся к способу, и в данном документе подробное описание не приводится.
Следует отметить, что каждый реализуемый способ в данном варианте осуществления может быть реализован отдельно или может быть реализован в любой комбинации без конфликтов, что не ограничивается настоящей заявкой.
Согласно устройству обработки данных в соответствии с данным вариантом осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных можно повысить точность оценки состояния обнаруженного объекта. Кроме того, за счет выполнения восстановления изображения с использованием алгоритма восстановления изображения на основе пространственных точек, который может быть совместим с несколькими типами зондов, можно повысить гибкость и эффективность восстановления изображения. Кроме того, за счет выполнения обработки изображения на основе целевого восстановленного результирующего изображения, совместимого с несколькими типами зондов, можно повысить точность соответствующего параметра обнаруженного объекта. Как полученные первые целевые результирующие данные, так и вторые целевые результирующие данные могут использоваться для помощи соответствующему лицу в диагностике обнаруженного объекта, тем самым повышая эффективность диагностики.
При необходимости в некоторых вариантах осуществления система обработки данных может включать в себя систему сбора данных, локальную вычислительную платформу, облачную вычислительную платформу и систему отображения. На Фиг. 5 показана структурная схема системы обработки данных, предусмотренной данным вариантом осуществления. Первый модуль обработки в аппаратном устройстве обработки данных установлен на локальной вычислительной платформе, и второй модуль обработки и третий модуль обработки в аппаратном устройстве обработки данных установлены на облачной вычислительной платформе.
Вариант 5 осуществления
Данный вариант осуществления обеспечивает компьютерное устройство для выполнения способа, предусмотренного в вышеупомянутом варианте осуществления. Компьютерное устройство может представлять собой вышеупомянутую облачную вычислительную платформу или может включать в себя вышеупомянутую облачную вычислительную платформу и локальную вычислительную платформу. В частности, им может быть настольный компьютер, ноутбук, сервер и другое компьютерное устройство.
На Фиг. 6 показана структурная схема компьютерного устройства, предусмотренного данным вариантом осуществления. Компьютерное устройство 50 включает в себя: по меньшей мере один процессор 51 и память 52;
где в памяти хранится компьютерная программа; и по меньшей мере один процессор исполняет компьютерную программу, хранящуюся в памяти, для реализации способа, предусмотренного в вышеупомянутых вариантах осуществления.
Согласно компьютерному устройству в соответствии с данным вариантом осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторые целевые результирующие данные можно значительно повысить точность оценки состояния обнаруженного объекта. Кроме того, за счет выполнения изображения с использованием алгоритма восстановления изображения на основе пространственных точек, который может быть совместим с несколькими типами зондов, можно повысить гибкость и эффективность восстановления изображения. Кроме того, за счет выполнения обработки изображения на основе целевого восстановленного результирующего изображения, совместимого с несколькими типами зондов, можно повысить точность соответствующего параметра обнаруженного объекта. Как полученные первые целевые результирующие данные, так и вторые целевые результирующие данные могут использоваться для помощи соответствующему лицу в диагностике обнаруженного объекта, тем самым повышая эффективность диагностики.
Вариант 6 осуществления
Данный вариант осуществления обеспечивает машиночитаемый носитель информации, на котором хранится компьютерная программа, и способ, предусмотренный в любом из вышеприведенных вариантов осуществления, реализуется при исполнении компьютерной программы.
Согласно машиночитаемому носителю информации, предусмотренному в данном варианте осуществления, за счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных можно значительно повысить точность оценки состояния обнаруженного объекта. Кроме того, за счет выполнения восстановление изображения с использованием алгоритма восстановления изображения на основе пространственных точек, который может быть совместим с несколькими типами зондов, можно повысить гибкость и эффективность восстановления изображения. Кроме того, за счет выполнения обработки изображения на основе целевого восстановленного результирующего изображения, совместимого с несколькими типами зондов, можно повысить точность соответствующего параметра обнаруженного объекта. Как полученные первые целевые результирующие данные, так и вторые целевые результирующие данные могут использоваться для помощи соответствующему лицу в диагностике обнаруженного объекта, тем самым повышая эффективность диагностики.
Следует понимать, что в нескольких вариантах осуществления, представленных в настоящей заявке, раскрытые аппаратное устройство и способ могут быть реализованы различным образом. Например, варианты осуществления аппаратного устройства, описанные выше, являются просто иллюстративными, например, разделение блоков является только логическим разделением функций, и в фактической реализации могут быть другие разделения. Например, несколько блоков или компонентов могут быть объединены или интегрированы в другую систему, или некоторые функции могут быть опущены или не реализованы. В дополнение к этому, отображаемая или обсуждаемая взаимная связь, или прямая связь или коммуникационное соединение могут быть косвенной связью или коммуникационным соединением через некоторые интерфейсы, аппаратные устройства или блоки и могут иметь электрическую, механическую или другую форму.
Блоки, описанные как отдельные компоненты, могут быть или могут не быть физически разделенными, и компоненты, отображаемые как блоки, могут быть или могут не быть физическими блоками, то есть они могут быть расположены в одном месте, или они могут быть распределены по многочисленным сетевым блокам. Некоторые или все блоки могут быть выбраны в соответствии с фактическими потребностями для достижения целей решений вариантов осуществления.
В дополнение к этому, функциональные блоки в различных вариантах осуществления настоящей заявки могут быть интегрированы в один процессорный блок, или каждый блок может физически существовать по отдельности, или два или более блоков могут быть объединены в один блок. Вышеупомянутый интегрированный блок может быть реализован в виде аппаратных средств или может быть реализован в виде аппаратных средств с программным функциональным блоком.
Вышеупомянутый интегрированный блок, реализованный в виде функционального блока программного обеспечения, может храниться на машиночитаемом носителе информации. Вышеупомянутый программный функциональный блок хранится на носителе информации и включает в себя несколько инструкций, позволяющих компьютерному устройству (которым может быть персональный компьютер, сервер или сетевое устройство и т.д.) или процессору исполнять часть этапов способа, описанного в каждом варианте осуществления настоящей заявки. Вышеупомянутый носитель информации включает в себя: U-диск, съемный жесткий диск, постоянную память (Read-Only Memory, ROM), оперативную память (Random Access Memory, RAM), магнитный диск или оптический диск и другие носители информации, которые могут хранить программные коды.
Специалистам в данной области техники будет очевидно, что разделение вышеупомянутых функциональных модулей используется только в качестве примера для удобства и краткости описания. В практических приложениях вышеупомянутые функции могут быть распределены между различными функциональными модулями в соответствии с потребностями, то есть внутренняя структура аппаратного устройства разделена на различные функциональные модули для выполнения всех или части функций, описанных выше. Для конкретного рабочего процесса аппаратного устройства, описанного выше, можно сделать ссылку на соответствующий процесс в вышеупомянутом варианте осуществления способа, который в данном документе не будет повторяться.
Наконец, следует отметить, что вышеупомянутые варианты осуществления используются только для иллюстрации технических решений настоящей заявки, а не для их ограничения. Хотя настоящая заявка была подробно описана со ссылкой на вышеупомянутые варианты осуществления, специалистам в данной области техники будет понятно, что по-прежнему можно модифицировать технические решения, описанные в вышеупомянутых вариантах осуществления, или заменить некоторые или все их технические признаки эквивалентным образом; однако эти модификации или замены не должны приводить к отклонению сущности соответствующих технических решений от объема технических решений вариантов осуществления настоящей заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМИ ИССЛЕДОВАНИЯМИ | 2019 |
|
RU2800255C2 |
| СПОСОБ, АППАРАТ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЦЕЛЕВОГО УЧАСТКА В ТКАНИ И НОСИТЕЛЬ ДАННЫХ | 2020 |
|
RU2789373C1 |
| СЕГМЕНТАЦИЯ КРУПНЫХ ОБЪЕКТОВ ИЗ НЕСКОЛЬКИХ ТРЕХМЕРНЫХ ВИДОВ | 2014 |
|
RU2663649C2 |
| АНАТОМИЧЕСКИ ИНТЕЛЛЕКТУАЛЬНАЯ ЭХОКАРДИОГРАФИЯ ДЛЯ МЕСТА ОКАЗАНИЯ МЕДИЦИНСКОГО ОБСЛУЖИВАНИЯ | 2013 |
|
RU2674228C2 |
| ВИЗУАЛИЗАЦИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ОБЗОРА С ПОМОЩЬЮ ДВУМЕРНОГО МАТРИЧНОГО ЗОНДА | 2009 |
|
RU2507535C2 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАТЕЛЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ И СПОСОБ УЛЬТРАЗВУКОВОГО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С АДАПТИВНЫМ ФОРМИРОВАНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2011 |
|
RU2550145C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ГАЗОВОГО КАРМАНА, ИСПОЛЬЗУЯ УЛЬТРАЗВУК | 2015 |
|
RU2640007C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОЛОЖЕНИЙ ОБЪЕКТА, КОМПЬЮТЕРНОЕ УСТРОЙСТВО И НОСИТЕЛЬ ДАННЫХ | 2021 |
|
RU2839268C2 |
| АВТОМАТИЧЕСКАЯ СЕГМЕНТАЦИЯ ТРЕХПЛОСКОСТНЫХ ИЗОБРАЖЕНИЙ ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ | 2014 |
|
RU2677055C2 |
Группа изобретений относится, в общем, к технической области обработки ультразвуковых изображений и, в частности, к способу обработки данных, аппаратному устройству, устройству и носителю информации. Предложен способ обработки данных, аппаратное устройство, устройство и носитель информации, где способ включает в себя: получение первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, где первые целевые результирующие данные включают в себя параметр, связанный с обнаруженным объектом; выполнение извлечения признаков над первыми целевыми результирующими данными с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и выполнение соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных. За счет выполнения извлечения признаков над параметром, связанным с обнаруженным объектом, с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных и дальнейшего выполнения соответствующей обработки над обнаруженным объектом на основе вторых целевых результирующих данных можно повысить точность оценки состояния обнаруженного объекта. Группа изобретений обеспечивает повышение скорости обработки ультразвуковых изображений. 2 н. и 6 з.п. ф-лы, 6 ил.
1. Способ обработки ультразвукового эхо-сигнала, содержащий этапы, на которых:
получают первые целевые результирующие данные в соответствии с исходным ультразвуковым эхо-сигналом, причем первые целевые результирующие данные содержат параметр, связанный с обнаруженным объектом;
выполняют извлечение признаков из первых целевых результирующих данных с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и
выполняют соответствующую обработку обнаруженного объекта на основе вторых целевых результирующих данных; при этом
этап получения первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом содержит подэтапы, на которых:
выполняют восстановление изображения исходного ультразвукового эхо-сигнала для получения целевого восстановленного результирующего изображения; и
выполняют обработку изображения целевого восстановленного результирующего изображения для получения первых целевых результирующих данных, причем этап обработки изображения содержит по меньшей мере одно из: коррекции оттенков серого, расширения и сжатия оттенков серого, γ-коррекции, выравнивания гистограммы, электронного усиления, интерполяционной обработки; причем этап выполнения восстановления изображения из исходного ультразвукового эхо-сигнала для получения целевого восстановленного результирующего изображения содержит подэтапы, на которых:
выполняют, при наличии алгоритма реконструкции изображения, совместимого с разными типами зондов, восстановление изображения из исходного ультразвукового эхо-сигнала с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, причем алгоритм восстановления изображения на основе пространственных точек представляет собой алгоритм восстановления изображения, совместимый с разными типами зондов; и
выбирают первое восстановленное результирующее изображение в качестве целевого восстановленного результирующего изображения; при этом этап выполнения восстановления изображения из исходного ультразвукового эхо-сигнала с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения содержит подэтап, на котором:
выполняют, в соответствии с предварительно настроенными параметрами зонда и параметром отображения, восстановление изображения из исходного ультразвукового эхо-сигнала с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, причем параметры зонда содержат идентификатор зонда, нулевую точку в декартовой системе координат зонда и первую координату каждого элемента массива зонда, а параметр отображения содержит вторую координату первого восстановленного результирующего изображения; причем
восстановление изображения основано на пути L(i) распространения ультразвука в точке P(i), соответствующей целевому восстановленному результирующему изображению, где L(i)=L(t)+P(Xi,Yi,Zi)-P(Xt,Yt,Zt), t=1,2,3…n, n≥1, n - количество элементов массива зонда, (Xt, Yt, Zt) - первые координаты каждого элемента зонда, a (Xi, Yi, Zi) - вторые координаты первого восстановленного результирующего изображения.
2. Способ по п. 1, в котором этап выполнения обработки изображения целевого восстановленного результирующего изображения для получения первых целевых результирующих данных содержит подэтап, на котором:
выполняют постобработку изображения и извлечение сигнала восстановленного результирующего изображения для получения первых целевых результирующих данных, причем первые целевые результирующие данные содержат по меньшей мере одно из: смещения, скорости, ускорения, деформации, скорости деформации, модуля упругости, контрастности, признаков текстуры, признаков распределения рассеивающих объектов, плотности рассеивающих объектов и размера рассеивающих объектов.
3. Способ по п. 1, в котором этап выполнения восстановления изображения из исходного ультразвукового эхо-сигнала для получения целевого восстановленного результирующего изображения, дополнительно, содержит подэтапы, на которых:
выполняют, когда алгоритмы восстановления изображения разных типов зондов не совместимы, для каждого зонда, в соответствии с алгоритмом восстановления изображения, соответствующим типу зонда, восстановление изображения из исходного ультразвукового эхо-сигнала для получения второго восстановленного результирующего изображения;
выполняют обработку пространственной интерполяции второго восстановленного результирующего изображения для получения третьего восстановленного результирующего изображения; и
выбирают третье восстановленное результирующее изображение в качестве целевого восстановленного результирующего изображения.
4. Способ по п. 3, дополнительно содержащий, после этапа выполнения обработки изображения целевого восстановленного результирующего изображения для получения первых целевых результирующих данных, этапы, на которых:
выполняют преобразование цифрового скана первых целевых результирующих данных для получения преобразованных результирующих данных; и
выполняют обработку отображения преобразованных результирующих данных.
5. Устройство обработки ультразвукового эхо-сигнала, содержащее:
первый модуль обработки, выполненный с возможностью получения первых целевых результирующих данных в соответствии с исходным ультразвуковым эхо-сигналом, причем первые целевые результирующие данные содержат параметр, связанный с обнаруженным объектом;
второй модуль обработки, выполненный с возможностью извлечения признаков из первых целевых результирующих данных с использованием предварительно обученной модели извлечения признаков для получения вторых целевых результирующих данных; и
третий модуль обработки, выполненный с возможностью осуществления соответствующей обработки обнаруженного объекта на основе вторых целевых результирующих данных; при этом
первый модуль обработки выполнен с возможностью:
восстановления изображения из исходного ультразвукового эхо-сигнала для получения целевого восстановленного результирующего изображения; и
обработки изображения целевого восстановленного результирующего изображения для получения первых целевых результирующих данных, причем обработка изображения содержит по меньшей мере одно из: коррекции оттенков серого, расширения и сжатия оттенков серого, γ-коррекции, выравнивания гистограммы, электронного усиления, интерполяционной обработки; причем
первый модуль обработки выполнен с возможностью:
восстановления, при наличии алгоритма реконструкции изображения, совместимого с разными типами зондов, изображения из исходного ультразвукового эхо-сигнала с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения, причем алгоритм восстановления изображения на основе пространственных точек представляет собой алгоритм восстановления изображения, совместимый с разными типами зондов; и
выбора первого восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения; при этом
первый модуль обработки выполнен с возможностью:
восстановления, в соответствии с предварительно настроенными параметрами зонда и параметром отображения, изображения из исходного ультразвукового эхо-сигнала с использованием алгоритма восстановления изображения на основе пространственных точек для получения первого восстановленного результирующего изображения; причем параметры зонда содержат идентификатор зонда, нулевую точку в декартовой системе координат зонда и первую координату каждого элемента массива зонда, а параметр отображения содержит вторую координату первого восстановленного результирующего изображения; причем
восстановление изображения основано на пути L(i) распространения ультразвука в точке P(i), соответствующей целевому восстановленному результирующему изображению, где L(i)=L(t)+P(Xi,Yi,Zi)-P(Xt,Yt,Zt), t=1,2,3…n, n≥1, n - количество элементов массива зонда, (Xt, Yt, Zt) - первые координаты каждого элемента зонда, a (Xi, Yi, Zi) - вторые координаты первого восстановленного результирующего изображения.
6. Устройство по п. 5, в котором первый модуль обработки выполнен с возможностью:
осуществления постобработки изображения и извлечения сигнала из восстановленного результирующего изображения для получения первых целевых результирующих данных, причем первые целевые результирующие данные содержат по меньшей мере одно из: смещения, скорости, ускорения, деформации, скорости деформации, модуля упругости, контрастности, признаков текстуры, признаков распределения рассеивающих объектов, плотности рассеивающих объектов и размера рассеивающих объектов.
7. Устройство по п. 5, в котором первый модуль обработки, дополнительно, выполнен с возможностью:
выполнения, когда алгоритмы восстановления изображения разных типов зондов не совместимы, для каждого зонда, в соответствии с алгоритмом восстановления изображения, соответствующим типу зонда, восстановления изображения из исходного ультразвукового эхо-сигнала для получения второго восстановленного результирующего изображения;
выполнения обработки пространственной интерполяции второго восстановленного результирующего изображения для получения третьего восстановленного результирующего изображения; и
выбора третьего восстановленного результирующего изображения в качестве целевого восстановленного результирующего изображения.
8. Устройство по п. 7, в котором первый модуль обработки дополнительно выполнен с возможностью:
выполнения преобразования цифрового скана первых целевых результирующих данных для получения преобразованных результирующих данных; и
выполнения обработки отображения преобразованных результирующих данных.
| US 2010312112 A1, 09.12.2012 | |||
| US 2016143617 A1, 26.05.2016 | |||
| WO 1998024065 A1, 04.06.1998 | |||
| US 2012271144 A1, 25.10.2012. |
