ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к процедурам, направляемым рентгеновской визуализацией. В частности, изобретение относится к способу обработки рентгеновского изображения. Кроме того, изобретение относится к системе, содержащей рентгеновскую систему, а также ультразвуковую систему, причем система оборудована компьютерной программой для выполнения способа.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Одной из проблем проведения направляемых визуализацией медицинских и хирургических процедур является эффективное использование информации, обеспечиваемой многими методами формирования изображений, которым мог подвергаться пациент перед вмешательством и после него.
Например, в кардиологии врач часто имеет доступ к рентгеновским изображениям в реальном масштабе времени, полученным рентгеновским аппаратом с С-образным штативом. Эти изображения имеют очень хорошую пространственную и временную точность, позволяя точно отслеживать продвижение тонких катетеров и других интервенционных инструментов. Однако мягкие ткани едва видны на этих изображениях, и, кроме того, эти изображения представляют собой проекции, которые не дают прямого доступа к объемной геометрии области вмешательства. Для получения доступа к этой важной информации решение состоит в использовании второго способа формирования изображений, который является как 3D (трехмерным), так и способен получать изображения мягких тканей.
Одним возможным выбором этой второй системы формирования изображений является формирование ультразвуковых 3D изображений. Преимущество этого способа состоит в том, что он может использоваться в реальном масштабе времени во время хирургической процедуры. При кардиологической процедуре, чреспищеводные зонды могут продвигаться в положение непосредственно рядом с сердцем, получая объемные изображения в реальном масштабе времени с анатомическими деталями, которые едва заметны при стандартном трансторакальном ультразвуковом исследовании.
Типичные вмешательства, включающие в себя в настоящее время эту комбинацию способов, представляют собой абляцию при фибрилляции предсердий, закрытие PFO (открытого овального отверстия) (или устранение других дефектов сердечных перегородок) и чрескожную пластику клапана (PVR). Все эти вмешательства ориентируются рентгеновской визуализацией, но во всех из них одновременное использование ультразвука или очень полезно, или абсолютно обязательно для контроля размещения инструмента/эндопротеза относительно анатомии мягких тканей.
Хотя ультразвуковой зонд может обеспечить очень полезные изображения анатомических структур, важным недостатком является компромисс, который существует между частотой кадров при временном получении изображений и величиной поля обзора.
Но часто трудно выбрать оптимальное поле обзора, размер которого сдерживается частотой кадров при получении изображений, но которое в то же время должно включать в себя область, подлежащую визуализации.
Обычно, сначала получают объем с большим полем обзора, и его используют для выбора небольших подобластей в пределах этого первого получения изображения, соответствующих представляющей интерес зоне. При многих вмешательствах представляющая интерес зона включает в себя интервенционные инструменты или некоторые из них. Таким образом, на практике объем получения изображений может нацеливаться вокруг интервенционных инструментов. К сожалению, интервенционные инструменты нельзя с легкостью визуализировать ультразвуком ввиду артефактов (акустических отражений, теней и т.д.) и ограниченного пространственного разрешения.
Как следствие, фактическое направление луча зонда так, чтобы он охватывал интервенционный инструмент, является нелегким и требует специализированных навыков и внимания. И это усугубляется при вмешательствах, когда и анатомические структуры, и устройство подвергаются активным перемещениям (абляция при фибрилляции предсердий, закрытие PFO, PVR).
Совмещение ультразвукового с рентгеновским изображением обычно выполняется с использованием основанных на изображении методов совмещения, нацеленных на выравнивание общих структур, визуализируемых обоими способами. Данный подход имеет несколько недостатков.
Важным недостатком является трудность включения ориентиров в поле обзора, которое может быть очень ограниченным на чреспищеводных эхокардиограммах (TEE). Кроме того, естественные ориентиры, такие как контуры сердца, нельзя использовать, потому что они невидны на рентгеновском изображении. Использование интервенционных инструментов в качестве ориентиров совмещения проблематично, поскольку они не достаточно определяются в ультразвуковом объеме вследствие помех и артефактов.
Совмещение ультразвукового и рентгеновского изображения может быть также достигнуто с использованием систем слежения, которые определяют положение ультразвукового зонда относительно системы формирования рентгеновских изображений. К сожалению, ультразвуковой зонд не поставляется со стандартной системой слежения, которая может быть прикреплена к системе формирования рентгеновских изображений. Многие системы были сконструированы для устранения этого пробела с использованием физических устройств слежения, таких как магнитные устройства. Эти системы могут быть дорогостоящими и требовать дополнительных этапов калибровки, которые склонны к ошибке.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью изобретения является предоставление системы и способа для комбинации ультразвукового и рентгеновского изображений.
Дополнительной целью изобретения является предоставление системы и способа для обнаружения и ориентации ультразвукового зонда в рентгеновском изображении.
Дополнительной целью изобретения является предоставление системы и способа для лучшей визуализации и ультразвукового, и рентгеновского изображения.
Это достигается объектом патентования соответственных независимых пунктов формулы изобретения. Дополнительные варианты осуществления описаны в соответственных зависимых пунктах формулы изобретения.
В целом, это достигается способом для комбинации ультразвукового и рентгеновского изображений, содержащим этапы приема рентгеновского изображения, обнаружения ультразвукового зонда на рентгеновском изображении и совмещения зонда, включая оценку положения и ориентации зонда, относительно опорной системы координат.
Следует отметить, что опорная система координат может представлять собой любую заданную систему координат. Например, опорная система координат может находиться в пределах плоскости рентгеновского изображения или может определяться относительно С-образного штатива рентгеновской системы, которая может использоваться при выполнении способа.
В соответствии с другим вариантом осуществления изобретения, способ содержит дополнительный этап сопоставления представленной в цифровой форме проекции 3D модели зонда с обнаруженным зондом на рентгеновском изображении, причем оценку положения и ориентации зонда извлекают из 3D модели зонда.
В соответствии с другим аспектом указанного варианта осуществления, 3D модель извлекается из компьютерно-томографического получения информации или представляет собой модель для автоматизированного проектирования.
Соответственно, 2D (двухмерное) рентгеновское изображение ультразвукового зонда может совмещаться с 3D моделью зонда, которая может представлять собой или 3D получение информации зонда, или автоматизированное проектирование (CAD). Данное совмещение выполняется сопоставлением представленной в цифровой форме рентгенограммы зонда и действительной рентгеновской проекции зонда. Следует отметить, что алгоритм на основе графического процессора (GPU) может использоваться для эффективного получения представленной в цифровой форме рентгенограммы.
2D-3D совмещение ультразвукового зонда дает 3D позицию зонда относительно системы формирования рентгеновских изображений. Существует несколько представляющих интерес видов применения, таких как объединение ультразвукового изображения с рентгеновским изображением или ультразвуковое объемное компаундирование для построения расширенного поля обзора.
Способ может дополнительно содержать этап визуализации настройки получения изображения зонда на рентгеновском изображении. Таким образом, оператор может легко регулировать настройки получения изображения благодаря информации, визуализируемой на рентгеновском изображении. Это обеспечивает интерактивный способ изменения настроек ультразвуковой системы получения изображения во время интервенционной процедуры.
Настройка получения изображения может представлять собой поле обзора ультразвукового зонда. Объем поля обзора ультразвукового зонда может быть представлен в виде усеченной пирамиды в 3D изображении. Данная пирамида может быть указана очертаниями области, которая может визуализироваться ультразвуковой системой. Кроме того, пирамида может определяться ее центром вместе с параметрами, подобными расстоянию до ультразвукового датчика зонда, ширине, длине, углу и/или глубине пирамиды. Объем поля обзора может также представлять собой усеченную пирамиду в одной плоскости, имеющую постоянную толщину, перпендикулярную указанной плоскости. При соответствующей калибровке усеченная пирамида может проецироваться и представляться на рентгеновском изображении. По мере того как оператор изменяет положение зонда, представление на дисплее получаемого исследуемого объема на рентгеновском изображении автоматически обновляется для обеспечения оператору непосредственной обратной связи.
Альтернативно, на рентгеновском изображении могут визуализироваться один или более параметров, подобных главному направлению, углу, расстоянию, частоте смены кадров или системе координат. Визуализация таких параметров может быть обеспечена, например, точками, или линиями, или цифрами в соответствующем положении на рентгеновском изображении. Главное направление может представлять собой направление, перпендикулярное поверхности ультразвукового датчика или датчиков на ультразвуковом зонде. Расстояние может представлять собой расстояние от ультразвукового датчика до центра поля обзора, или до центра опорной системы координат, или до интервенционного устройства, также видимого на рентгеновском изображении, или до любой другой заданной точки на рентгеновском изображении.
Это может обеспечить возможность интерактивного регулирования настроек получения изображений ультразвуковой системой через непосредственную визуализацию на рентгеновской системе. Таким образом, клиницисту может быть легче регулировать ориентацию ультразвукового зонда относительно интервенционного устройства, подобного катетеру, где данный катетер может быть расположен в пределах усеченной пирамиды, т.е. в пределах поля обзора ультразвукового зонда.
В соответствии с другим аспектом изобретения, способ, кроме того, содержит этап обнаружения интервенционного устройства на рентгеновском изображении и манипулирования зондом с тем, чтобы интервенционное устройство находилось в пределах поля обзора зонда. Следует отметить, что эта манипуляция может выполняться вручную, а также автоматически.
Соответственно, может быть обеспечена возможность обнаружения и отслеживания интервенционного устройства на 2D рентгеновском изображении и направления луча ультразвукового зонда к этому устройству. Поле обзора зонда может автоматически направляться, и, кроме того, внешний вид устройства для вмешательства при флюороскопии может изменяться, например мерцанием, вспыхиванием или окрашиванием, когда устройство или, по меньшей мере, часть устройства входит в поле обзора ультразвукового зонда или присутствует в нем. Посредством этого визуализация будет улучшена и будет значительно помогать направлению луча ультразвукового зонда в интервенционном контексте.
Наконец, способ может, кроме того, включать этап наложения ультразвукового изображения, обеспечиваемого зондом поверх рентгеновского изображения. Кроме того, возможно наложение множества ультразвуковых изображений поверх одного рентгеновского изображения. Это может обеспечить расширенное поле обзора.
Следует отметить, что интервенционное устройство может представлять собой гибкий или жесткий катетер и устройство для биопсии, канюлю или троакар. Ультразвуковой зонд может также представлять собой ультразвуковой зонд для чреспищеводной эхокардиографии.
В соответствии с другим аспектом изобретения, предоставляется компьютерная программа, посредством которой описанный выше способ может выполняться автоматически или, по меньшей мере, преимущественно автоматически. Поэтому компьютерная программа включает в себя наборы инструкций для сохранения рентгеновского изображения, полученного рентгеновской системой, наборы инструкций по обнаружению ультразвукового зонда в указанном рентгеновском изображении и наборы инструкций для совмещения зонда и, таким образом, оценки положения и ориентации ультразвукового зонда относительно опорной системы координат. Кроме того, компьютерная программа может включать в себя наборы инструкций по приему данных, представляющих 3D модель ультразвукового зонда.
Такая компьютерная программа может быть осуществлена в соответствии с еще одним вариантом осуществления изобретения в системе, включающей рентгеновскую систему, ультразвуковую систему с ультразвуковым зондом и блоком обработки. Обычно, такая система включает также монитор для визуализации ультразвуковых, а также рентгеновских изображений.
Такая компьютерная программа предпочтительно загружается в оперативную память процессора обработки данных. Процессор обработки данных, таким образом, оборудован для осуществления способа по изобретению. Кроме того, изобретение относится к считываемому компьютером носителю, такому как CD-ROM, на котором может храниться компьютерная программа. Однако компьютерная программа может быть также представлена по сети, подобной интернету, и может загружаться в оперативную память процессора обработки данных из такой сети.
Следует понимать, что такая компьютерная программа может быть предоставлена или в виде программного обеспечения, а также может осуществляться (по меньшей мере частично) в виде аппаратного обеспечения блока обработки.
Следует отметить, что варианты осуществления изобретения описаны со ссылкой на разные объекты патентования. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы изобретения с описанием способа, тогда как другие варианты осуществления описаны со ссылкой на пункты формулы изобретения с описанием устройства. Однако специалист в данной области техники из вышеприведенного и нижеследующего описания сможет сделать вывод, что если не указано иное, в дополнение к любой комбинации признаков, относящихся к одному типу объекта патентования, любая комбинация между признаками, относящимися к другим объектам патентования, считается раскрытой в настоящей заявке.
Аспекты, определенные выше, и другие аспекты, признаки и преимущества настоящего изобретения могут быть также выведены из примеров вариантов осуществления, которые будут описаны ниже и объяснены со ссылкой на примеры вариантов осуществления, также показанных на чертежах, но которыми изобретение не ограничено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1,A показан ультразвуковой зонд, изображение которого извлечено из компьютерно-томографического получения информации.
На фиг. 1,B показана не совмещенная 3D модель.
На фиг. 1,C показана совмещенная 3D модель.
На фиг. 2 показано рентгеновское изображение, включающее ультразвуковой зонд.
На фиг. 3 показано рентгеновское изображение, включающее в себя ультразвуковой зонд, а также схематичная визуализация поля обзора упомянутого зонда.
Фиг. 4 представляет собой диаграмму, иллюстрирующую систему и способ в соответствии с изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг. 1 слева направо показано рентгеновское целевое изображение ультразвукового зонда, не совмещенная представленная в цифровой форме рентгенограмма (DRR) ультразвукового зонда, а также совмещенная DRR. На фиг. 1,C, 3D модель, показанная на фиг. 1,B, ориентирована так, что ее проекция сопоставлена с проекцией зонда на рентгеновском изображении, показанном на фиг. 1,A.
Затем ориентированная 3D модель, показанная на фиг. 1,C, комбинируется с рентгеновским изображением. На фиг. 2 показано такое наложение совмещенной DRR 110 поверх рентгеновского изображения грудной клетки 300 и сердца 320 после основанного на интенсивности совмещения, т.е. оценка положения и ориентации зонда. Это дает информацию о положении/ориентации зонда относительно системы формирования рентгеновских изображений. Если обе системы калиброваны, то ультразвуковое изображение может сливаться с рентгеновским изображением. На фиг. 2 также показаны интервенционные устройства 200, например катетеры. Система координат перед ультразвуковым зондом 110 указывает оцененную ориентацию ультразвуковых датчиков относительно плоскости рентгеновского изображения.
Система получения данных рентгеновского исследования сконфигурирована для получения 2D рентгеновских изображений в реальном масштабе времени анатомической области во время интервенционной процедуры. Этот способ не обеспечивает возможности четкой визуализации сложных мягкотканых анатомических структур, таких как сердце.
Система получения данных ультразвукового исследования, например чреспищеводным эхокардиографическим (TEE) ультразвуковым зондом, сконфигурирована для получения изображений анатомических структур. Предполагается, что эта система получения данных ультразвукового исследования находится, по меньшей мере, частично, в поле обзора системы получения данных рентгеновского исследования и обеспечивает получение информации, достаточной для извлечения системы координат изображений, получаемых этой системой. Это, например, наблюдается, когда весь детектор системы получения данных ультразвукового исследования присутствует в рентгеновском изображении, и/или когда его положение можно оценить по другим структурам, присутствующим на рентгеновском изображении.
В последующем, 3D модель ультразвукового зонда может использоваться для автоматического подсчета позиции зонда. Это может быть сделано сопоставлением рентгеновского изображения ультразвукового зонда с представленной в цифровой форме рентгенограммой, полученной с помощью прозрачной проекцией 3D модели (ср. фиг. 1 и 2). Алгоритм оптимизации обеспечивает возможность извлечения шести параметров позиции зонда, что дает 3D положение зонда и его 3D ориентацию относительно, например, рентгеновской системы с C-образным штативом, определяющие опорную систему координат.
Автономная калибровка зонда дает связь между ультразвуковым изображением и 3D моделью. В комбинации с предыдущим этапом, затем возможно иметь связь между ультразвуковым изображением и системой формирования рентгеновских изображений, и поэтому с рентгеновским изображением, если система формирования рентгеновских изображений также калибрована.
Затем прямо следует слияние между рентгеновским изображением и ультразвуковым изображением.
Другим представляющим интерес применением является использование системы формирования рентгеновских изображений в качестве опорной системы координат для составления другого получения ультразвукового изображения и построения расширенного поля обзора, которое представляет большой интерес для получения изображения с помощью TEE, где поле обзора часто очень ограничено.
Как иллюстративно показано на фиг. 3, объем получения изображения 130 ультразвуковым зондом 110 может быть представлен в виде усеченной пирамиды в 3D, предполагая, что известны положение и ориентация ультразвукового зонда 110 относительно рентгеновского изображения. Как видно на фиг. 3, интервенционное устройство 200 с его интервенционным концевым участком может быть расположено так, чтобы поле обзора 130 охватывало этот интервенционный концевой участок устройства 200. Кроме того, на фиг. 3 показан угол 140, определяющий угол луча поля обзора ультразвукового зонда. В данном случае, угол луча составляет 42,3 градуса.
На фиг. 4 показана блок-схема последовательности операций, показывающая этапы способа комбинации ультразвукового и рентгеновского изображений в соответствии с изобретением. Пациент одновременно изображается ультразвуковой системой 100 и рентгеновской системой 400. В предпочтительном варианте осуществления, рассматриваемый ультразвуковой зонд ультразвуковой системы 100 способен синтезировать направленные лучи предпочтительно в 3D.
Следует понимать, что этапы, описанные в отношении способа, представляют собой основные этапы, причем эти этапы могли бы дифференцироваться или делиться на несколько подэтапов. Кроме того, могли бы также быть подэтапы между указанными основными этапами. Поэтому подэтап указывается, только если этот этап важен для понимания принципов способа в соответствии с изобретением.
На этапе S1, ультразвуковая система 100 и система 400 формирования рентгеновских изображений сначала взаимно совмещаются. Это может обычно достигаться формированием изображения зонда ультразвуковой системы 100 рентгеновской системой 400 и на основании настроек 150 и данных 160 ультразвуковой системы 100 и настроек 410 рентгеновской системы 100 плюс на возможном использовании 3D модели 500 зонда или маркеров при определении положения зонда на опорном рентгеновском изображении. По этой информации и на основании релевантной калибровочной информации можно использовать параметры поля обзора зонда на опорном рентгеновском изображении, как описано выше. Данные S1c будут меняться на визуализацию полученного изображения.
В то же время, на этапе S2, устройство для вмешательства (например, кончик катетера) обнаруживают и отслеживают на рентгеновских изображениях. Этот этап полагается на данные 420 рентгеновской системы 400 и на обычные средства обнаружения объектов, которые полагаются на пространственную характеристику устройства и, возможно, на характеристики его движения (например, устройство мультиплицируется движением сердца плюс направляющим движением, видимым на проекции).
На этапе S3, предпочтительно улучшить определение 2D местоположения, обеспечиваемое отслеживанием устройства на рентгеновских изображениях, и попытаться получить оценку глубины рассматриваемого устройства. Для достижения этой цели возможны несколько подходов, среди которых можно указать использование устройств, обозревающих ширину, использование иных рентгеновских проекций под другим углом, например в двухплоскостном режиме, или использование движений в виде покачиваний. Например, можно оценить ширину ультразвукового зонда, где возможные в последующем расположения ультразвукового зонда определяются на основании рассчитанного размера и сегментации изображаемого объекта.
На этапе S4, улучшенное устройством определение местоположения S3a может затем сравниваться с обнаруженным ультразвуковым полем обзора S1b, и соответственно могут быть поданы несколько команд. Например, команда устройства в виде вспышек/мерцания может подаваться в канал обработки формирования изображений потока данных рентгеновского исследования, или команда S4a направления зонда может посылаться в релевантный модуль.
С другой стороны, данные S4b этапа S4 вместе с информацией S2a этапа S2 приведут к этапу S5, т.е. визуализации устройства на рентгеновском изображении, которая адаптирована на основании таких явлений, как вхождение (мерцание/вспышки) или присутствие (окрашивание) устройства в ультразвуковом поле обзора. Это предоставляет пользователю легкий метод управления направлением зонда на основании рентгеновских изображений с высоким разрешением. Конечно, это направление также облегчается визуализацией ультразвукового конуса, как показано на фиг. 3. Результатом этапа S5 является улучшенный 2D обзор S5a, облегчающий направление ультразвукового зонда.
На этапе S6, альтернативно или дополнительно, команда S6a может быть подана на направляющий луч модуль ультразвуковой системы 100, как на то поле обзора, которое следует генерировать для хорошей визуализации устройства в центре ультразвукового конуса (объема или изображения). Модуль направления зонда на основании информации совмещения ультразвукового/рентгеновского изображения определит и применит релевантный набор параметров, обеспечивающих возможность этого направления, приводимого в действие устройством.
Хотя изобретение было проиллюстрировано и подробно описано в чертежах и предшествующем описании, такие иллюстрации и описания считаются иллюстративными или примерными, а не ограничивающими, изобретение не ограничивается описанными вариантами осуществления.
Специалисты в данной области техники могут понять и реализовать другие разновидности описанных вариантов осуществления при практическом воплощении заявленного изобретения на основании изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и признак единственного числа не исключает множественного числа. Один процессор или другой узел может выполнять функции нескольких пунктов, указанных в формуле изобретения. Само по себе то, что указанные определенные меры взаимно разные, не указывает на невозможность использования комбинации этих мер для обеспечения преимущества. Компьютерная программа может храниться/распределяться на подходящем носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с аппаратным обеспечением или в виде его части, но может также распространяться в других видах, например, через интернет или другие проводные и беспроводные телекоммуникационные системы. Любые ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие объем изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
100 ультразвуковая система
110 ультразвуковой зонд
120 система координат ультразвукового зонда
130 поле обзора
140 угол поля обзора
150 настройки ультразвукового зонда
160 поток данных ультразвукового исследования
200 интервенционное устройство
300 грудная клетка
320 сердце
400 рентгеновская система
410 параметры получения данных рентгеновского исследования
420 поток данных рентгеновского исследования
500 3D модель зонда
S1a параметр совмещения
S1b ультразвуковое поле обзора на опорном рентгеновском изображении
S1c обмен данными
S2a определение местоположения устройства
S3a улучшенное определение местоположения устройства
S4a команды направления зонда
S4b сигнал «в поле обзора»
S5a улучшенный 2D обзор ручного направления
S6a параметр зонда



Изобретение относится к средствам для проведения направляемых визуализацией медицинских процедур. Способ обработки рентгеновского изображения содержит этапы, на которых принимают 2D рентгеновское изображение анатомической области, которая включает в себя ультразвуковой зонд, обнаруживают на нем ультразвуковой зонд, совмещают ультразвуковой зонд с опорной системой координат, включая оценку положения и ориентации ультразвукового зонда относительно опорной системы координат. Этап совмещения дополнительно содержит этап, на котором сопоставляют представленную в цифровой форме проекцию 3D модели ультразвукового зонда с обнаруженным ультразвуковым зондом на рентгеновском изображении, причем оценку положения и ориентации ультразвукового зонда извлекают из сопоставленной 3D модели. Считываемый компьютером носитель содержит сохраненные на нем наборы инструкций для блока обработки системы для комбинации ультразвукового и рентгеновского изображений, содержащей рентгеновскую систему 2D рентгеновского изображения, ультразвуковую систему, включающую ультразвуковой зонд, блок обработки и монитор для отображения комбинированного изображения. Использование изобретения позволяет повысить точность определения положения. 3 н. и 6 з.п. ф-лы, 4 ил.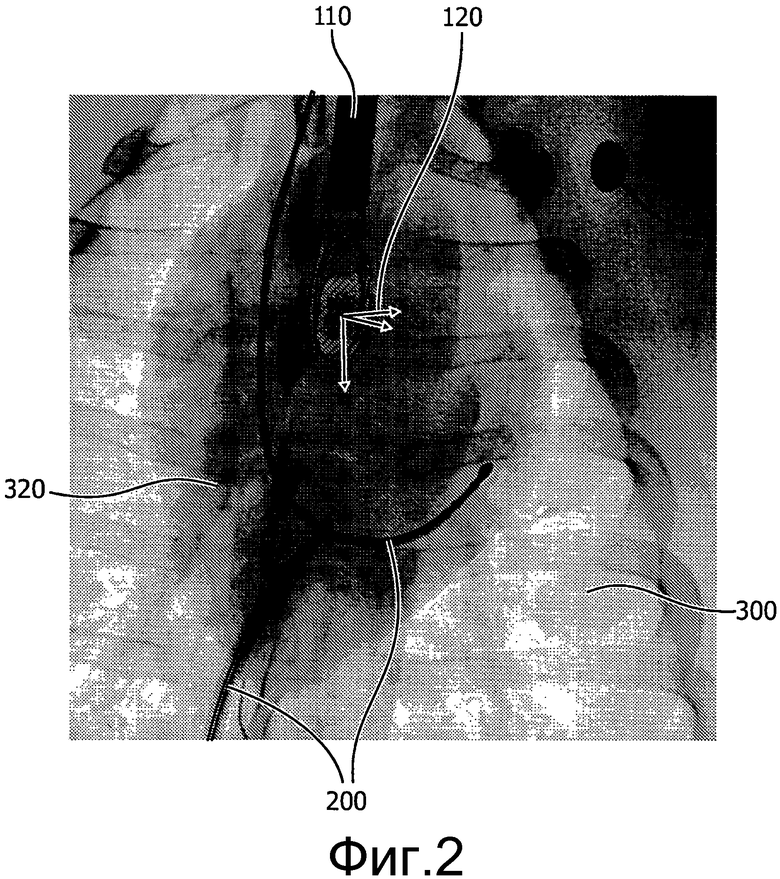
1. Способ обработки рентгеновского изображения, причем способ содержит этапы, на которых:
принимают 2D (двухмерное) рентгеновское изображение анатомической области, которая включает в себя ультразвуковой зонд,
обнаруживают (S2) ультразвуковой зонд на 2D рентгеновском изображении,
совмещают (S1) ультразвуковой зонд с опорной системой координат, включая оценку положения и ориентации ультразвукового зонда относительно опорной системы координат,
причем этап совмещения дополнительно содержит этап, на котором сопоставляют представленную в цифровой форме проекцию 3D (трехмерной) модели (500) ультразвукового зонда с обнаруженным ультразвуковым зондом на рентгеновском изображении, причем оценку положения и ориентации ультразвукового зонда извлекают из упомянутой сопоставленной 3D модели.
2. Способ по п. 1, в котором 3D модель (500) извлекают из полученной посредством компьютерной томографии информации или 3D модель (500) представляет собой модель для автоматизированного проектирования.
3. Способ по п. 1, дополнительно содержащий этапы, на которых обнаруживают интервенционное устройство (200) на рентгеновском изображении и манипулируют ультразвуковым зондом так, чтобы интервенционное устройство находилось в пределах поля обзора ультразвукового зонда.
4. Способ по п. 3, в котором ультразвуковым зондом манипулируют автоматически.
5. Способ по п. 3, в котором интервенционное устройство выделяют на рентгеновском изображении, если интервенционное устройство находится в пределах поля обзора ультразвукового зонда.
6. Способ по любому из пп. 1-5, дополнительно содержащий этап, на котором отслеживают ультразвуковой зонд на серии рентгеновских изображений.
7. Способ по п. 1, дополнительно содержащий этап, на котором накладывают ультразвуковое изображение, обеспеченное ультразвуковым зондом, поверх рентгеновского изображения.
8. Считываемый компьютером носитель, содержащий сохраненные на нем наборы инструкций для вынуждения блока обработки выполнять способ обработки рентгеновского изображения по п. 1.
9. Система для комбинации ультразвукового и рентгеновского изображений, причем система содержит:
рентгеновскую систему (400) для обеспечения 2D (двухмерного) рентгеновского изображения,
ультразвуковую систему (100), включающую в себя ультразвуковой зонд (110),
блок обработки, сконфигурированный для выполнения этапов способа по любому из пп. 1-7, и
монитор для отображения комбинированного изображения, объединяющего 2D рентгеновское изображение и ультразвуковое изображение, обеспеченное ультразвуковым зондом.
| US 2007276243 A1, 29.11.2007 | |||
| US 2009185657 A1, 23.07.2009 | |||
| US 2008146919 A1, 19.06.2008 | |||
| Christos V | |||
| Bourantas et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ РАЗМЕРОВ И ПОЛОЖЕНИЯ СЕРДЦА ПАЦИЕНТА ПО ФЛЮОРОГРАФИЧЕСКИМ СНИМКАМ | 2008 |
|
RU2372844C1 |

