Предлагаемое изобретение относится к комбинированным винто-зубо-рычажным перемешивающим устройствам и может быть использовано в пищевой, медицинской, химической, строительной отраслях промышленности, а также в сельском хозяйстве, как устройство, необходимое для приготовления однородных сред, позволяющее интенсифицировать массо- и теплообменные процессы, выравнивать концентрацию и температуру во всем объеме перемешиваемых веществ путем увеличения поверхности контакта фаз. Кроме того, перемешивающие устройства позволяют обеспечить равномерное распределение энергии в объеме аппарата.
В сельском хозяйстве процесс перемешивания используют при приготовлении различных жидких удобрений повышающих плодородие высевных площадей, ядохимикатов используемых для протравливания семян перед посевом, при сушке зерна и других материалов; в химико-фармацевтической и медицинской промышленности - при приготовлении лекарственных веществ особая роль отводится качественному перемешиванию многокомпонентных составляющих; в пищевой промышленности, при приготовлении сырных масс (V. Guileta, N. Chusovitin. Dispositis de 
 le salon Europeen de l’invention de Strasbourg. - Strasbourg, 2011), в кондитерском производстве - в целях замещения монотонных ручных операций, например при уваривании конфетных масс; в машиностроении - при изготовлении шлифовальных кругов, когда смешивают алмазный порошок с вяжущим материалом или медный порошок с графитом при изготовлении угольных щёток и так далее; в строительной индустрии - при производстве тонкокерамических изделий из пластичных глин и каолинов, в частности, при создании керамической массы и глазури.
le salon Europeen de l’invention de Strasbourg. - Strasbourg, 2011), в кондитерском производстве - в целях замещения монотонных ручных операций, например при уваривании конфетных масс; в машиностроении - при изготовлении шлифовальных кругов, когда смешивают алмазный порошок с вяжущим материалом или медный порошок с графитом при изготовлении угольных щёток и так далее; в строительной индустрии - при производстве тонкокерамических изделий из пластичных глин и каолинов, в частности, при создании керамической массы и глазури.
Несмотря на то, что большинство конструкций, используемых механических перемешивающих устройств создавалось на основе практического опыта без достаточного обоснования, они являются в мировой практике доминирующим типом. Данный факт объясняется универсальностью таких аппаратов, надежностью их конструкций, высоким КПД по сравнению с перемешивающими устройствами других типов.
Известно устройство для перемешивания (патент РФ 2067535, В28G 5/16 от 1996 г.), содержащее стойку и пять двухвершинных (простых) подвижных звеньев: кривошип, шатун, камень, кулису (далее винт) и коромысло, связанные низшими одноподвижными кинематическими парами.
К достоинствам применения низших одноподвижных пар следует отнести: легкую компенсацию их износа благодаря соответствующим регулировочным устройствам, малые затраты на производство и обслуживание таких пар, их высокий моторесурс. Пары достаточно надёжны при изменяющихся размерах звеньев: например, при просадке фундамента (стойки), температурных воздействиях; замены износившихся деталей и остаточных деформациях при авариях. Они способны воспринимать ударные нагрузки, имеют малый коэффициент трения, обладают высокой нагрузочной способностью и долговечностью. Конструкция одноподвижных пар обеспечивает достаточную площадь опорных поверхностей и отсутствие или, по крайней мере, уменьшение изгиба оси шарнира при передаче усилия.
Кроме того, использование в механизмах низших кинематических пар не требует дополнительных устройств, обеспечивающих постоянное замыкание звеньев.
Кривошип механизма приводится в движение асинхронным двигателем и образует со стойкой и шатуном вращательные кинематические пары с параллельными осями, установленные с любой пространственной ориентацией. Винт и камень образуют винтовую кинематическую пару с осью, совпадающей с осью винта.
Применение такого вида подвижного соединения звеньев в механизмах позволит получить вращательное движение с большим выигрышем в силе.
Коромысло, будучи присоединенным к верхней части винта посредством соосной ей третьей вращательной кинематической пары, образует со стойкой четвертую вращательную кинематическую пару с осью движения, параллельной осям пар шатун - кривошип - стойка.
Конструктивно в устройство для перемешивания между камнем и кривошипом введено дополнительное связующее звено - шатун, необходимое для реализации движения звеньев механизма в параллельных плоскостях, а также, для равномерного распределения усилий между заходами винта. Пятая вращательная кинематическая пара образована камнем и шатуном, ось которой перпендикулярна винту и расположена в плоскости, параллельной плоскости движения кривошипа.
Рассмотрим последовательность передачи движения между звеньями данного механизма.
Перманентное вращение ведущего звена - кривошипа через шатун передается камню, который, двигаясь поступательно вдоль винта, принуждает его к вращению с переменными по знаку и направлению скоростями. Глубина погружения и углы входа винта рабочего органа, прикрепленного к свободной консоли, являются переменными величинами. Число простейших видов движений, совершаемых рабочим органом механизма, равно четырем.
В таком механизме рабочий орган, вращаясь вместе с винтом (относительное движение), перемещается по дуге постоянного радиуса (переносное движение), равного квадратному корню суммы квадратов необходимого размера кулисы, найденного из условия проворачиваемости (существования) кривошипа (правило Ф. Грасгофа) и коромысла.
Недостатком данного устройства являются низкая производительность, качество выходного продукта и продолжительность рабочего цикла, что обусловлено противоречиями между критериями эффективности движения рабочего органа в относительном и переносном движениях
Известно устройство для перемешивания (патент РФ 2369430 В01F 7/16, В28С 5/16 от 2009 г.), в основу которого положены четыре двухвершинных подвижных звена, образующие пространственную стационарную кинематическую цепь.
Звенья устройства установлены в следующем порядке: стойка-кривошип-шатун-камень-кулиса-стойка и соединены кинематическими парами, из которых вращательные пары кривошип - стойка, кривошип - шатун параллельны и перпендикулярны оси третьей вращательной пары камень-шатун, которая в свою очередь перпендикулярна оси кулисы.
Ось винтовой пары «кулиса - камень» параллельна продольной оси кулисы, в верхней части которой установлена сферическая трехподвижная кинематическая пара кулиса-стойка, смещенная в пространстве относительно пары кривошип-стойка. В частных положениях звеньев оси вращения кулисы и шатуна могут быть перпендикулярны.
Это устройство для перемешивания работает следующим образом.
Вращение кривошипа относительно стойки инициирует переносное вращение шатуна вокруг оси кривошипа и относительное неполное (колебательное) его вращение вокруг собственной оси. Поскольку сферическая кинематическая пара смещена в пространстве относительно пары «кривошип-стойка», движение шатуна преобразуется в движение камня вдоль кулисы, вследствие чего рабочий орган, прикрепленный к нижней части кулисы, приобретает вращательные движения вокруг трех осей.
В момент смены направления движения камня вдоль кулисы угловые скорости вращения кулисы вокруг своей оси и относительно оси ОХ меняют знак, генерируется гидродинамический удар в перемешиваемых веществах, увеличивается турбулентность потоков смешиваемых веществ, что благоприятно сказывается на качестве выходного продукта.
Однако наличие в механизме сферической кинематической пары накладывает общее ограничение к точности изготовления и монтажа механизма. Кроме того, вершина кулисы механизма, к консоли которой прикреплен рабочий орган, связана со стойкой, а значит, рабочий орган не имеет относительного движения, а только пространственные, переносные перемещения, представленные его вращением вокруг собственной оси, проходящей через сферическую пару, и вокруг других осей, проходящих через центр указанной пары. Такие кинематические возможности не позволяют найти резервы увеличения производительности и качества выходного продукта.
Прототипом предлагаемого изобретения выбран комбинированный, стационарный, винто-зубчато-рычажный механизм (патент RU 2788075 от 16.01.23).
В основу структурного строения указанного механизма положена замкнутая пространственная стационарная (с двумя присоединениями к стойке) винто-зубчато-рычажная кинематическая цепь звеньев, установленных последовательно: стойка, кривошип, шатун, гайка, винт-сателлит, водило, центральное зубчатое колесо, и вращательных кинематических пар с параллельными осями: кривошип-стойка, кривошип-шатун и при этом, перпендикулярными оси вращательной пары гайка-шатун, которая в свою очередь перпендикулярна осям винтовой пары гайка-винт и вращательной пары винт-водило и при этом имеет ортогональное скрещивание с осью вращения пары водило-центральное зубчатое колесо.
Двухподвижная пара зубчатого зацепления в механизме образованна сателлитом и центральным зубчатым колесом. Двухподвижная сферическая кинематическая пара с пальцем (второе присоединение механизма к стойке) образованна центральным зубчатым колесом и стойкой. Геометрия её траекторного паза исключает относительное вращение центрального зубчатого колеса вокруг своей оси симметрии, которая параллельна оси винта, и допускает вращения вокруг осей перпендикулярных оси пары винт-гайка.
В частных положениях звеньев оси вращения винта-сателлита и шатуна могут быть не перпендикулярны, аналогично тому, как выполнено взаимное положение соответствующих звеньев в патенте РФ №2369430.
Отметим, что в основу структурной схемы прототипа положен классический кулисный механизм, у которого при вращении кривошипа, камень скользит по кулисе, в прототипе это гайка и винт, соответственно.
Прототип, устройство для перемешивания, работает следующим образом: перманентное вращение кривошипа вокруг опоры в вертикальной плоскости YOX передается через шатун гайке. Далее, поскольку винт и гайка образуют винтовую кинематическую пару, то при поступательном движении гайки вдоль винта, винт получает вращение вокруг своей продольной оси. Положение продольной оси винта в пространстве изменяется, так как сателлит, в свою очередь, присоединенный к верхней консоли винта образует зубчатое зацепление с центральным зубчатым колесом, которое в прототипе не подвижно относительно своей оси.
Структурная схема звеньев, в которой сателлит имеет постоянное внешнее зубчатое зацепление с центральным зубчатым колесом (солнечное колесо), внутреннее с корончатым, водило и вращательные пары с параллельными осями, известна как планетарный механизм Джеймса.
Отметим, что в прототипе, необходимость устанавливать корончатое колесо отпадает, а также то, что центральное зубчатое колесо, не имея относительного вращения, совершает переносное движение представленное совокупностью перемещений вдоль траекторного паза сферической пары и вокруг её пальца. Так при вращении сателлита, ввиду наличия водила, необходимых и введенных в устройство кинематических пар, на нем реализуется круговое переносное движение вокруг центральной оси, проходящей через сферическую с пальцем пару, удерживающую опорное зубчатое колесо и являющуюся вторым присоединением механизма к опоре.
У группы таких звеньев как: винт, сателлит, центральное зубчатое колесо и водило, существует местная, локальная подвижность относительно сферической пары с пальцем и вращательными парами кривошип-шатун и шатун-гайка.
При чередовании направления движения гайки по винту, с опускания на подъем, и наоборот, на винте-сателлите возникают реверсы в относительном движении. В крайних положениях винта, когда кривошип выстраивается перпендикулярно винту, происходит реверсы в переносном его движении.
Таким образом, при вращении ведущего звена - кривошипа, рабочий орган механизма, присоединенный к нижней консоли винта, совершает сложное пространственное перемещение с переменными угловыми и линейными скоростями вокруг и вдоль трех координатных осей. Непрерывно меняются глубины погружения в среду и углы наклона рабочих поверхностей рабочего органа.
Однако повысить качество перемешивания, производительность при сокращении времени рабочего цикла реализацией примененных в прототипе конструктивных решений, возникающей картине распределения усилий в кинематических парах при передачи движения, не рациональным выбором ведущего звена, наличию местной подвижности, проблематично.
Технический результат состоит в создании устройства, конструктивные особенности которого позволят исключить приведенные выше недостатки и увеличить качество перемешивания, производительность при сокращении времени рабочего цикла.
Сущность предложенного изобретения состоит в рациональной комбинации и компоновке различных видов звеньев, а именно, пяти рычажных звеньев и двух зубчатых колес, соединенных низшими, за исключением одного зубчатого зацепления, кинематическими парами, позволяющими реализовать сложные, кинематически насыщенные, неповторяющиеся пространственные перемещения рабочего органа в перемешиваемой среде, что увеличивает качество перемешивания, производительность при сокращении времени рабочего цикла.
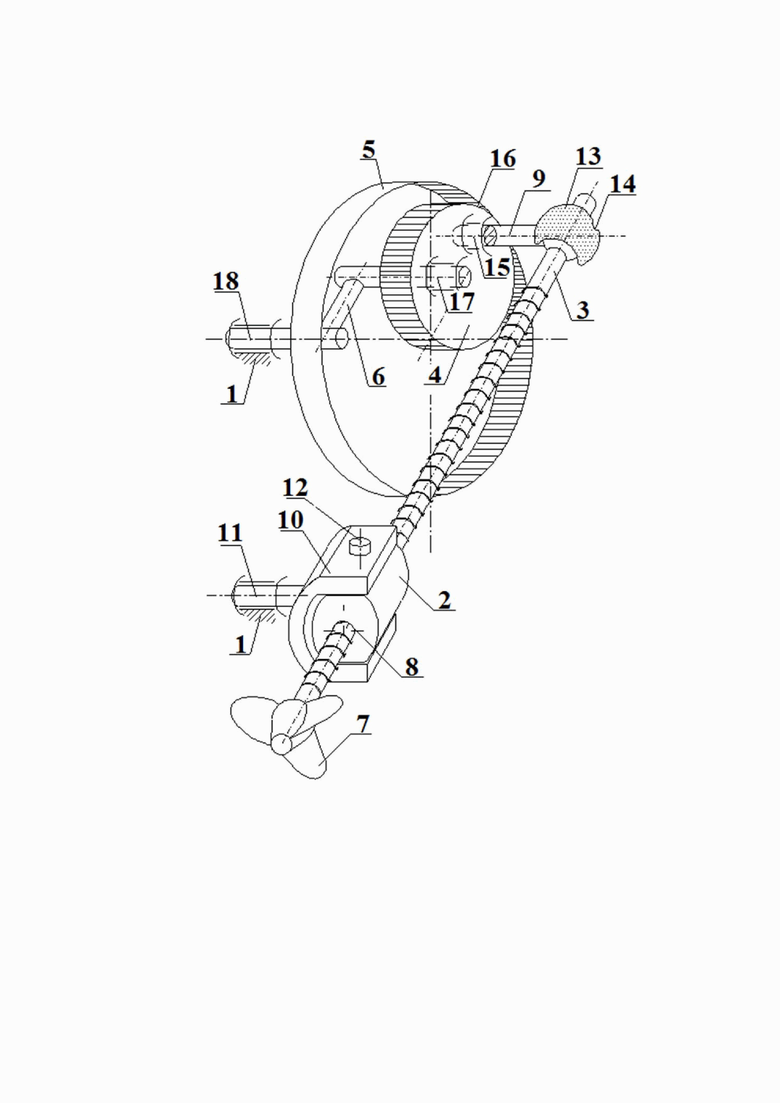
Поставленная задача достигается тем, что в замкнутую пространственную стационарную, с двумя присоединениями к стойке, структурную цепь звеньев предлагаемого устройства (чертеж 1), состоящую из стойки 1, гайки 2, винта 3, сателлита 4, водилы 6, рабочего органа 7 и винтовой кинематической пары винт-гайка 8 введены: корончатое зубчатое колесо 5, вал 9, коромысло 10 которое образует две ортогональные друг другу вращательные пары 11 и 12, где 11 является первой опорой механизма, а 12 предназначена для присоединения коромысла 10 к гайке 2 и располагается перпендикулярно оси пары винт-гайка 8, верхняя часть винта образует сферическую пару с пальцем 13 с валом 9, где траекторный паз пальца 14 размещен в плоскости вал-винт, вал 9 присоединен эксцентрично к сателлиту 4 и образует с ним вращательную пару 15 с осью параллельной осям водила 6 и пересекающейся с осью винта 3, сателлит 4 входит в зацепление 16 с корончатым зубчатым колесом 5 и образует вращательную пару 17 с водилом 6, которое закреплено на стойке вращательной парой 18 с осью параллельной осям соединений вал-стеллит 15, водило-сателлит 17 и является вторым присоединением механизма к стойке 1.
К существенными признаками предлагаемого устройства следует отнести: многовариантность пространственного взаимного положения звеньев механизма (чертеж 1), таких как: не параллельность продольных осей вала 9 и коромысла 10; их не ортогональность оси винта 3; геометрию траекторного паза 14 сферической пары вал-винт 13, которая придает свободу вращению винта 3 вокруг своей продольной оси и вращению вокруг поперечной оси, которая перпендикулярна плоскости проходящей через продольные оси винта 3 и вала 9.
Указанные перемещения винта 3 обусловлены такими предлагаемыми конструктивными решениями как, размещение сферической с пальцем пары 13, образованной валом 9 и винтом 3. Вал 9 примыкает к сателлиту 4 со смещением, т.е. имеет эксцентриситет e равный расстоянию между осями вращательных пар: вал-сателлит 15 и водило-сателлит 17.
Согласно размещению вала 9 на сателлите 4, он, а, следовательно, и сферическая пара с пальцем 13 движется по укороченной гипоциклоиде т.к. размер эксцентриситета меньше радиуса делительной окружности сателлита 4 (е<r4). Отметим, что в предложенном перемешивающем механизме возможно гипоциклоиду движения сферической пары с пальцем 13 выполнить и удлиненной (е>r4), если кинематическую пару вал-сателлит 15 вынести на полке, приваренной к торцу сателлита 4.
Траекторию движения сферической пары 13 можно реализовать как укороченной, удлиненной или же обыкновенной эпициклоидой. Для этого необходимо скорректировать строение зубчатой части механизма. А именно, взамен корончатого зубчатого колеса 5 установить на центральной оси зубчатой передачи неподвижное колесо, которое будет образовывать внешнее зубчатое зацепление с сателлитом 4.
Фиксированный размер между креплениями механизма к стойке 11, 18 и протяженность вала 9 позволит при раскручивании водилом 6 сателлита 4 непрерывно менять углы размещения винта 3 в плоскости вал-винт, глубину его проникновения в рабочую среду, а также, что крайне важно, его угловую скорость вращения вокруг продольной оси винта 3 и двух поперечных осей.
Перемещение винта 3 в гайке 2 обусловлено движением ведущего звена механизма - водилы 6, переносным перемещением сателлита 4 вокруг центральной оси 18 интегрированного в перемешивающее устройство модифицированного механизма Джеймса без солнечного колеса (исключено за ненадобностью) и его относительным движением, вокруг движущейся оси вращательной пары водило-сателлит 17, генерирует кинематически сложное пространственное перемещение винта 3, которые можно условно разнести по трем подвижным осям: относительные вращения вокруг первой поперечной оси, второй и вращение вокруг продольной оси винта. Свободу движения вокруг первой поперечной оси обеспечивает, в том числе, вращательная пара гайка-коромысло 12. Свободу вращения вокруг второй поперечной оси дополняет вращательная пара коромысло-стойка 11.
Вращение винта 3 со знакопеременными двумя относительными движениями, проходящими вокруг поперечных осей винта 3 и относительного вращения вокруг продольной оси винта 3 с угловыми скоростями с многочисленными, не совпадающими по времени и положениям возникающих реверсов рабочего органа 7 присоединенного к нижней консоли винта 3 в перемешиваемой среде, является уникальным преимуществом предлагаемого механизма с точки зрения рассеивания механической энергии в рабочей среде. В результате чего будет значительно увеличено качество перемешивания, производительность при сокращении времени рабочего цикла.
Число реверсов в плоскости перпендикулярной второй поперечной оси винта определяется числом арок приходящихся на оборот водила k=(r5-(r4-е))/е, где е - эксцентриситет, равный расстоянию между вращательными парами 15 и 17, r4 - радиус сателлита, r5 - радиус корончатого зубчатого колеса 5. В перемещающейся плоскости вал-винт число реверсов рабочего органа равно 2. Они возникают в положениях звеньев механизма, которым соответствует смена направления движения сферической пары 13, например, в сторону к винт-гайке 8, и наоборот.
Если k не сократимая дробь, то значение r5-(r4-е) определяет количество каспов - точек касания вращающегося сателлита с корончатым зубчатым колесом необходимое для возврата его в начальное положение. В таком случае, траектория движения рабочего органа, полученная на первом обороте, водила, не совпадает с его траекторией на втором, и т.д. пока число каспов не будет равно r5-(r4-е), что удивительным образом благоприятствует равномерности распределения энергии по объему смешиваемых продуктов.
В итоге рабочий орган 7 перемещается в пространстве имея переменный тангаж и рысканье тем самым многократно за цикл изменяется глубины его погружения в перемешиваемую среду рабочего органа, а значит увеличивается потоки воздействия рабочего органа на перемешиваемую среду вследствие чего повышается качество перемешивания и производительность, сокращает время технологического процесса.
В устройстве условия перемешивания выполняются при вращении ведущего водила 6 на угол ϕ6>2π, в пределах которого принужденное циклическое изменение рабочего размера винта 3, обусловленное конструкцией устройства, инициирует поочередное достижение критериями эффективности движения рациональных величин в относительных перемещениях.
Поскольку в положениях смены направления движения гайки 2 угловые скорости вращения винта 3 вокруг своей продольной оси и вокруг двух поперечных осей неоднократно меняют знак, создаются гидродинамические удары в перемешиваемой среде и, следовательно, увеличивается турбулентность их потоков, что благоприятно сказывается как на качестве, так и времени достижения удовлетворительного результата.
Кроме того, функция угловой скорости вращения винта 3 вокруг продольной оси достигает экстремумов в положениях, когда эксцентриситет, отрезок измеряемый от 15 к 17, поворачиваясь скрещивается с винтом 3 под углом 90°. Тем самым, создаются интенсивные потоки перемешиваемых веществ, направленные в отдаленные, угловые, периферийные области дежи (емкости для перемешивания).
Рабочий орган механизма реализует размывающее действие на осадок тяжелых фракций смешиваемых веществ, скапливающихся вследствие действия гравитационных сил, у дна реактора, и значит, увеличивается производительность устройства для перемешивания и качество выходного продукта.
Выполнение перечисленных выше структурных условий синтеза механизма обуславливает создание неравномерных пространственных сдвиговых деформаций обрабатываемого материала, а именно: придание винту 3 пространственных относительных движений, что улучшит качество перемешивания и производительность, сократит время рабочего цикла.
Сокращаются застойные зоны, исключаются такие негативные факты при перемешивании как воронкообразование и разбрызгивание. Следует отметить, что уменьшение числа подвижных звеньев (подвижных масс) по сравнению с прототипом и рациональный выбор ведущего звена снижает величину затрачиваемой работы непосредственно на функционирование устройства, что благоприятно сказывается на величине КПД, надежности, затрачиваемом времени на обслуживание и ремонт.
Переменная глубина погружения и расположение (ориентация) рабочего органа 7 в смешиваемых веществах исключает радиально-осевое перемешивание (насосное действие мешалки), которое обуславливает образование воронки вследствие действия гравитационных сил. Известно, что образующаяся воронка вызывает падение мощности перемешивания, возникновение дополнительных динамических нагрузок ввиду нарушения сплошности среды, вызванной подсосом воздуха через поверхность центральной воронки. В случае достижении глубины воронки рабочего органа, он будет испытывать удары о жидкость, что отрицательно отразится на продолжительности, как технологического цикла перемешивания, так и на рабочем ресурсе всего механизма.
При синтезе кинематической схемы устройства для перемешивания следует учесть ряд параметрических требований взаимоувязывающих между собой радиусы корончатого колеса 5 - r5, сателлита 4 - r4, эксцентриситета - e, линейных размеров вала l9 и винта l3, межопорного расстояния l1, а также конструктивные требования предъявляемых к синтезу винтовой пары винт-гайка 8, условия ограничения подвижности механизма до равной 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1996 |
|
RU2113897C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616655C1 |
| Возвратно-вращательное перемешивающее устройство | 2016 |
|
RU2616656C1 |
| Преобразующий зубчатый механизм | 1989 |
|
SU1726874A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1994 |
|
RU2067535C1 |
| ЗУБЧАТЫЙ ПРЕОБРАЗОВАТЕЛЬ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ВРАЩАТЕЛЬНОЕ | 2012 |
|
RU2528493C2 |
Изобретение относится к отрасли машиностроения и может быть использовано в пищевой, медицинской, химической, сельскохозяйственной отраслях промышленности, как механизм, необходимый для приготовления однородных сред. В устройство для перемешивания введены: корончатое зубчатое колесо, вал и коромысло которое образует две ортогональные друг другу вращательные пары: одна из которых является первой опорой механизма, а вторая предназначена для присоединения к гайке и располагается перпендикулярно оси пары винт-гайка, верхняя часть винта образует сферическую пару с пальцем с валом, где траекторный паз пальца размещен в плоскости вал-винт, вал присоединен эксцентрично к сателлиту и образует с ним вращательную пару с осью параллельной осям водила и пересекающейся с осью винта, сателлит входит в зацепление с корончатым зубчатым колесом и образует вращательную пару с водилом, которое закреплено на стойке вращательной парой с осью параллельной осям соединений водило-сателлит, вал-стеллит и является вторым присоединением механизма к стойке. Устройство позволяет увеличить качество перемешивания, производительность, сократить время рабочего цикла, имеет высокий КПД, в связи со сменой ведущего звена на водило, исключено возможное заклинивание в винтовой паре, исключена местная подвижность. 1 ил.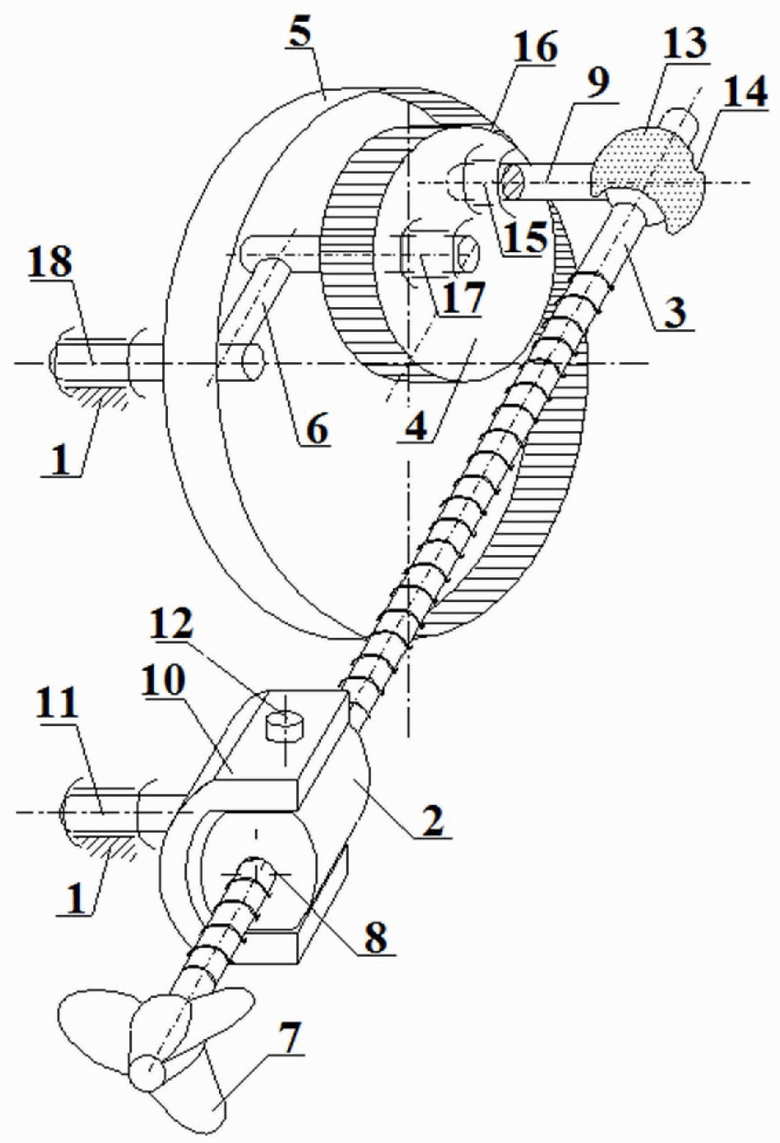
Устройство для перемешивания, представляющее собой замкнутую пространственную стационарную, с двумя присоединениями к стойке, винто-зубчато-рычажную кинематическую цепь звеньев, в состав которой входят: стойка, гайка, винт, к нижней части которого присоединен рабочий орган, сателлит, водило, а также винтовая кинематическая пара винт-гайка, отличающееся тем, что в него введены: корончатое зубчатое колесо, вал и коромысло, которое образует две ортогональные друг другу вращательные пары: одна из которых является первой опорой механизма, а вторая предназначена для присоединения к гайке и располагается перпендикулярно оси пары винт-гайка, верхняя часть винта образует сферическую пару с пальцем с валом, где траекторный паз пальца размещен в плоскости вал-винт, вал присоединен эксцентрично к сателлиту и образует с ним вращательную пару с осью параллельной осям водила и пересекающейся с осью винта, сателлит входит в зацепление с корончатым зубчатым колесом и образует вращательную пару с водилом, которое закреплено на стойке вращательной парой с осью параллельной осям соединений водило-сателлит, вал-стеллит и является вторым присоединением механизма к стойке.
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1996 |
|
RU2113897C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2011 |
|
RU2478473C1 |
| Перемешивающее устройство с неравномерным движением рабочего органа | 2020 |
|
RU2779980C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1994 |
|
RU2067535C1 |
| CN 104172898 A, 03.12.2014. | |||
