Изобретение относится к отрасли машиностроения, в частности перемешивающим устройствам, и может быть использовано в пищевой, медицинской, химической, строительной отраслях промышленности, а также в сельском хозяйстве, как устройство, необходимое для приготовления однородных сред, позволяющее интенсифицировать массо- и теплообменные процессы, выравнивающее концентрацию и температуру во всем объеме перемешиваемых веществ.
Несмотря на то, что большинство конструкций используемых механических перемешивающих устройств определялись на основе практического опыта без достаточного обоснования, они являются в мировой практике доминирующим типом. Данный факт объясняется универсальностью таких аппаратов, надежностью их конструкций, высоким КПД по сравнению с перемешивающими устройствами других типов.
Известно устройство для перемешивания (А.С. СССР №863378 B28G 5/16), содержащее емкость для перемешивания - реактор и исполнительный механизм.
В состав исполнительного механизма входят два кривошипа, один из которых ведущий, а также шатун и балансир.
Ведомый кривошип закреплен на реакторе с помощью балансира. Рабочий орган исполнительного механизма установлен на валу, который образует вращательную кинематическую пару с ведомым кривошипом. Ведущий и ведомый кривошипы соединены шатуном. При вращении кривошипов изменяется положение вала рабочего органа, который приводится во вращательное движение отдельным приводом.
Оси вращения кривошипов перпендикулярны оси балансира и удалены от нее на одинаковое расстояние, равное половине длины шатуна.
Рабочее движение получено как сумма двух независимых движений - вращения вала и возвратно-качательного движения балансира.
К недостаткам указанного устройства для перемешивания следует отнести то, что в его основу положен двухподвижный рычажный механизм, один из приводов которого установлен на подвижном звене, что вызывает дополнительные динамические нагрузки, как на кинематические пары - подвижные соединения, так и на звенья механизма.
Отметим также, что рабочий орган механизма имеет постоянную угловую скорость вращения, что не позволяет достигать необходимого качества и производительности при перемешивании.
При перемешивании с постоянной угловой скоростью рабочего органа существует вероятность, что через некоторое время, в связи с выравниванием угловых скоростей веществ и рабочего органа, среда приобретет послойное, ламинарное движение. Чтобы избежать этого, на внутренних поверхностях реактора, чаще всего, устанавливаются отражательные перегородки, змеевики, секционирующие область перемешивания. Перегородки могут быть расположены у самой стенки аппарата либо на некотором расстоянии от нее, устанавливаться под углом относительно радиуса вращения мешалки, а также иметь высоту, равную уровню вещества или меньше. При этом потребляемая мощность при перемешивании возрастает. С увеличением площади контакта веществ с реактором увеличиваются так называемые зоны налипания, что затрудняет извлечение продукта, снижаются объемы выхода готового продукта.
К достоинствам описываемого механизма следует отнести то, что технологический процесс перемешивания обеспечивается переменной глубиной погружения и расположением (ориентацией) рабочего органа в смешиваемых веществах, что частично исключит радиально-осевое перемешивание (насосное действие мешалки), которое связано с образованием воронки вследствие действия гравитационных сил. Известно, что образующаяся воронка вызывает падение мощности перемешивания, возникновение дополнительных динамических нагрузок ввиду нарушения сплошности среды, вызванной подсосом воздуха через поверхность центральной воронки. В случае достижении глубины воронки рабочего органа он будет испытывать удары о жидкость, что отрицательно отразится на продолжительности как технологического цикла перемешивания, так и на рабочем ресурсе всего механизма.
Кроме того, известно устройство для перемешивания (патент РФ 2369430 B01F 7/16, В28С 5/16), в основу которого положены четыре двухвершинных подвижных звена, образующие пространственную стационарную кинематическую цепь.
Звенья устройства установлены в следующем порядке: стойка-кривошип-шатун-камень-кулиса-стойка и соединены кинематическими парами, из которых вращательные пары кривошип - стойка, кривошип - шатун параллельны и перпендикулярны оси третьей вращательной паре камень-шатун, которая в свою очередь перпендикулярна оси кулисы.
Ось винтовой пары кулиса - камень параллельна продольной оси кулисы, в верхней части которой установлена сферическая, трехподвижная кинематическая пара кулиса-стойка, смещенная в пространстве относительно пары кривошип-стойка. В частных положениях звеньев оси вращения кулисы и шатуна могут быть перпендикулярны.
Устройство для перемешивания работает следующим образом.
Вращение кривошипа относительно стойки инициирует переносное вращение шатуна вокруг оси кривошипа и относительное неполное его вращение (колебательное) вокруг собственной оси. Поскольку сферическая кинематическая пара смещена в пространстве относительно пары кривошип-стойка, движение шатуна преобразуется в движение камня вдоль кулисы, вследствие чего рабочий орган, прикрепленный к нижней части кулисы, приобретает вращательные движения вокруг трех осей.
В момент смены направления движения камня вдоль кулисы угловые скорости вращения кулисы вокруг своей оси и относительно оси ОХ меняют знак, возникает гидродинамический удар у перемешиваемых веществ, увеличивается турбулентность потоков смешиваемых веществ, что благоприятно сказывается на качестве выходного продукта. Однако, наличие в механизме сферической кинематической пары накладывает общее ограничение к точности изготовления и монтажа механизма.
Известно устройство для перемешивания (патент РФ 2067535, B28G 5/16), являющееся прототипом предлагаемого изобретения и содержащее стойку и пять двухвершинных (простых) подвижных звена: кривошип, шатун, камень, кулису - далее винт и коромысло, связанные низшими одноподвижными кинематическими парами.
К достоинствам применения низших одноподвижных пар следует отнести: легкую компенсацию их износа благодаря соответствующим регулировочным устройствам, малые затраты на производство и обслуживание таких пар; их высокий моторесурс. Пары достаточно надежны при изменившихся размерах звеньев: например, при просадке фундамента (стойки), температурных воздействиях; замены износившихся деталей и остаточных деформациях при авариях. Они способны воспринимать ударные нагрузки, имеют малый коэффициент трения, обладают высокой нагрузочной способностью и долговечностью. Конструкция одноподвижных пар обеспечивает достаточную площадь опорных поверхностей и отсутствие или, по крайней мере, уменьшение изгиба оси шарнира при передаче усилия.
Кроме того, использование в механизмах низших кинематических пар не требует дополнительных устройств, обеспечивающих постоянное замыкание звеньев.
Кривошип механизма приводится в движение асинхронным двигателем и образует со стойкой и шатуном вращательные кинематические пары с параллельными осями, установленные с любой пространственной ориентацией. Винт и камень образуют винтовую кинематическую пару с осью, совпадающей с осью винта.
Применение такого вида подвижного соединения звеньев в механизмах позволит получить вращательное движение с большим выигрышем в силе.
Коромысло, будучи присоединенным к верхней части винта посредством соосной ей третьей вращательной кинематической пары, образует со стойкой четвертую вращательную кинематическую пару с осью движения, параллельной осям пар шатун - кривошип - стойка.
Конструктивно в устройство для перемешивания, между камнем и кривошипом, введено дополнительное связующее звено - шатун, необходимое для реализации движения звеньев механизма в параллельных плоскостях, а также с целью равномерного распределения усилий между заходами винта. Пятая вращательная кинематическая пара образована камнем и шатуном, ось которой перпендикулярна винту и расположена в плоскости, параллельной плоскости движения кривошипа.
Рассмотрим последовательность передачи движения между звеньями механизма - прототипа.
Перманентное вращение ведущего звена - кривошипа через шатун передается камню, который, двигаясь поступательно вдоль винта, принуждает его к вращению с переменными по знаку и направлению скоростями. Глубина погружения и углы входа, прикрепленного к свободной консоли винта рабочего органа, являются переменными величинами. Число простейших движений, совершаемых рабочим органом механизма, равно четырем.
Рабочий орган, вращаясь вместе с винтом (относительное движение), перемещается по дуге постоянного радиуса (переносное движение), равного квадратному корню суммы квадратов необходимого размера кулисы, найденного из условия проворачиваемости (существования) кривошипа (правило Ф.Грасгофа) и коромысла.
Путь, пройденный частицами смешиваемых веществ до стенок емкости для перемешивания при воздействии на них рабочего органа, различен, что поддерживает турбулентность в течение смешиваемых веществ созданную рабочим органом с переменными скоростями в относительном и переносном движениях, что позволяет улучшить показатели качества перемешивания, однородность выходного продукта, сократить время технологического процесса и энергозатраты.
Теоретическое исследование и компьютерное моделирование показало, что качество перемешивания зависит в том числе и от критериев эффективности движения рабочего органа, равных отношениям его скоростей к пройденным путям. Принятые критерии дают количественную оценку величины энергии, переданной рабочим органом перемешиваемым веществам, приходящейся на единицы путей.
Установлено, что повысить качество перемешивания в прототипе невозможно, поскольку размер коромысла (l3) имеет фиксированное значение, при котором всегда один из критериев эффективности движения рабочего органа не принимает максимальных значений.
Задачей предлагаемого изобретения является повышение качества перемешивания за счет реализация рациональных условий перемешивания, обеспечивающих критериям эффективности движения рабочего органа требуемые значения.
Поставленная задача достигается тем, что в замкнутую пространственную кинематическую цепь известного устройства для перемешивания, состоящую из звеньев, установленных в следующем порядке: стойка-кривошип-шатун-камень-винт и вращательных кинематических пар с параллельными осями: кривошип-стойка, кривошип-шатун и при этом перпендикулярными оси вращательной пары камень-шатун, которая в свою очередь перпендикулярна оси винтовой пары камень-винт, введены кулиса и качающийся ползун, образующие поступательную пару с осью движения, перпендикулярной оси вращательной пары стойка-качающийся ползун, которая параллельна оси пары кривошип-стойка, при этом кулиса с винтом образует вращательную пару, соосную паре камень-винт, а со стойкой - двухподвижную кинематическую пару.
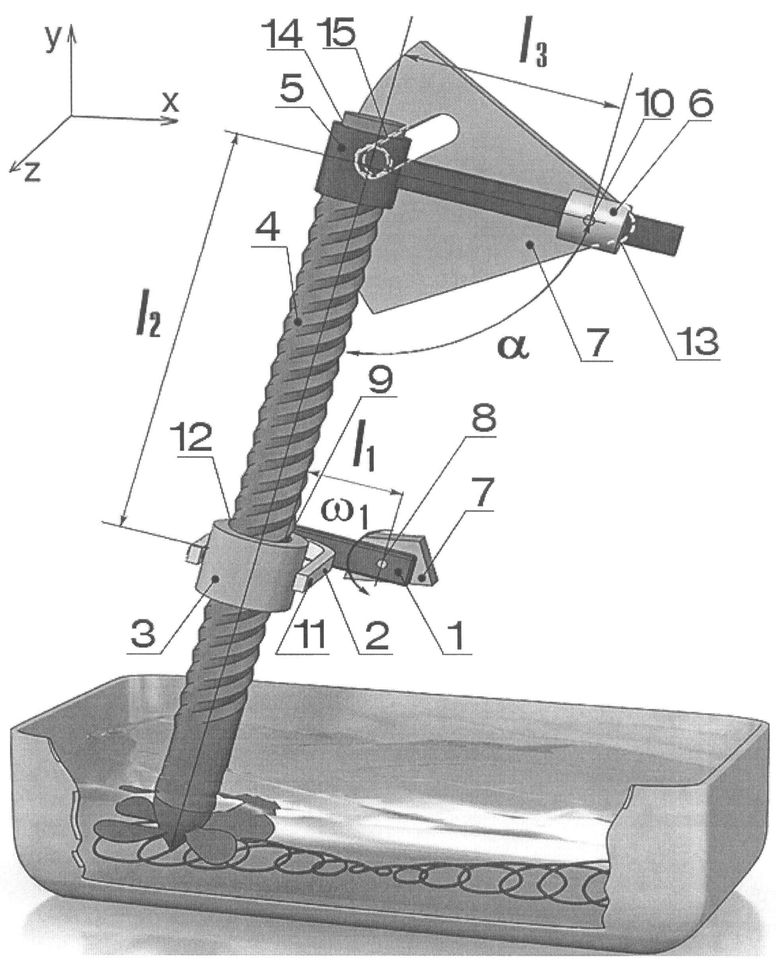
На чертеже в пространственной координатной системе XYZ приведено одно из крайних положений звеньев предлагаемого устройства, а также емкость (реактор) для перемешивания заполненная рабочим материалом.
Предлагаемое устройство для перемешивания относится к одноподвижным пространственным рычажным механизмам, состоящим из семи звеньев:
кривошипа 1, шатуна 2, камня 3, винта 4, кулисы 5, качающегося ползуна 6 и стойки 7, соединенных семью одноподвижыми и одной двухподвижной кинематическими парами.
Одноподвижные, с параллельными осями вращательные пары 8, 9 и 10 образованы, соответственно, кривошипом 1 со стойкой 7 и с шатуном 2, качающимся ползуном 6 и стойкой 7. Шатун 2 и камень 3 соединены вращательной парой 11, ось которой перпендикулярна оси винта 4 и осям пар 8, 9 и 10. Ось винтовой одноподвижной кинематической пары 12, установленной между камнем 3 и винтом 4, параллельна продольной оси симметрии звена 4. Кулиса 5 образует три кинематических пары со звеньями механизма: поступательную пару 13 с качающимся ползуном; вращательную пару 14 с винтом 4, соосную паре 12, и двухподвижную (траекторную) пару 15 со стойкой 7.
Первый замкнутый контур механизма образуют звенья 7, 1, 2, 3, 4, 5 и 7, связанные парами 8, 9, 11, 12, 14 и 15. Во второй контур входят звенья 7, 5, 6 и 7, объединные подвижными парами 15, 10, 13. Рабочий орган устройства для перемешивания присоединен к консоли винта 4.
Устройство для перемешивания работает следующим образом.
Вращение кривошипа 1 относительно стойки 7, обусловленное вращением вала двигателя, инициирует переносное вращение шатуна 2 вокруг оси кривошипа 1 и относительное, неполное его движение (качательное) вокруг оси пары 9. Перемещение шатуна передается камню 3, который движется вдоль винта 4, тем самым принуждает его к вращению вокруг продольной его оси и оси крепления механизма к стойке.
Изменение размера звена 5 (l3) при движении кривошипа 1 (l1) обусловлено конструктивно фиксированным углом α, образованным звеньями 4 и 5, при этом движение вершины 15 кулисы 5 ограничено геометрией траекторного паза, а также местоположением качающегося ползуна 6 и образованных им кинематических пар.
В предлагаемом устройстве рациональные условия перемешивания
выполняются при вращении кривошипа на угол φ1=2π, в течение которого рабочий размер звена 5, определяемый расстоянием l3 между 14 и 10, варьируется от величины, обеспечивающей достижение рабочим органом механизма максимального значения критерия эффективности движения в относительном перемещении, до размера, обеспечивающего достижение максимального значения критерия эффективности движения рабочего органа в переносном движении, что соответствует изменению l3 от расчетной максимальной до минимальной величины.
В момент смены направления движения камня 3 вдоль винта 4 угловые скорости вращения звена 4 вокруг своей оси и относительно оси OZ меняют знак, что создает гидродинамические удары в перемешиваемых веществах, а следовательно, увеличивается турбулентность потоков смешиваемых веществ, что увеличит качество перемешивания.
Функция угловой скорости вращения винта вокруг своей оси (относительное движение) достигает экстремумов в положениях, когда кривошип 1 перпендикулярен винту 4. Тем самым создаются интенсивные течения перемешиваемых веществ, которые размывают застойные зоны, как правило, расположенные в углах реактора.
В положениях звеньев механизма, определяемых крайними положениями камня 3, переносная скорость винта максимальна, что создает размывающее действие на осадок тяжелых фракций смешиваемых веществ, скапливающихся вследствие действия гравитационных сил, у дна реактора, что позволит увеличить объем выходного продукта.
При выборе длин звеньев также должно быть учтено дополнительное параметрическое условие, регламентирующее размер стойки 7, который должен быть больше проекции кривошипа 1 на нее. В таком случае переносное движение винта 4 ограничено до необходимого качательного движения.
В предлагаемом устройстве для перемешивания движение звеньев механизма совмещаются в пространственное перемещение рабочего органа с переменной по величине и направлению скоростями.
Выполнение рациональных условий перемешивания в механизме предлагаемой конструкции обуславливает создание неравномерных пространственных сдвиговых деформаций обрабатываемого материала, что повысит качество выходного продукта за счет равномерного распределения энергии рабочего органа в слоях перемешиваемых веществ.
Отметим, что устройство для перемешивания является пространственным механизмом, его подвижность определена по формуле Сомова - Малышева и равна единице.
Конструкция устройства позволит увеличить качество перемешивания за счет того, что критерии эффективности движения рабочего органа принимают максимальные значения, при этом рабочий орган имеет четыре, не совпадающих по возникновению реверсов, переменные скорости вращения, углы входа в перемешиваемую среду и глубины его погружения. В связи с чем сокращаются застойные зоны, энергозатраты на перемешивание, исключаются воронкообразование и разбрызгивание.
Кроме того, совмещение движений на ведущем звене механизма при минимальном количестве кинематических пар и звеньев является резервом сокращения времени цикла и повышения производительности механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2013 |
|
RU2548087C1 |
| Устройство для перемешивания | 2022 |
|
RU2788075C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| Устройство для перемешивания | 2023 |
|
RU2799476C1 |
| ВИНТОРЫЧАЖНЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2687407C1 |
| КОНЦЕНТРАЦИОННЫЙ СТОЛ | 1999 |
|
RU2162016C2 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1996 |
|
RU2113897C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1994 |
|
RU2067535C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
Изобретение относится к отрасли машиностроения, в частности к перемешивающим устройствам, и может быть использовано в пищевой, медицинской, химической, строительной отраслях промышленности и сельском хозяйстве как устройство, предназначенное для приготовления однородных сред и позволяющее интенсифицировать массо- и теплообменные процессы, выравнивать концентрации и температуры в объеме перемешиваемых веществ. Устройство для перемешивания представляет собой замкнутую пространственную кинематическую цепь, состоящую из звеньев, установленных в следующем порядке: стойка-кривошип-шатун-камень-винт и вращательных кинематических пар с параллельными осями: кривошип-стойка, кривошип-шатун, перпендикулярными оси вращательной пары камень-шатун, которая в свою очередь перпендикулярна оси винтовой пары камень-винт. В нем установлена кулиса и качающийся ползун, образующие поступательную пару с осью движения, перпендикулярной оси вращательной пары стойка-качающийся ползун, которая параллельна оси пары кривошип-стойка. Кулиса с винтом образует вращательную пару, соосную паре камень-винт, а со стойкой - двухподвижную кинематическую пару. Повышается качество перемешивания. 1 ил.
Устройство для перемешивания, представляющее собой замкнутую пространственную кинематическую цепь, состоящую из звеньев, установленных в следующем порядке: стойка-кривошип-шатун-камень-винт, и вращательных кинематических пар с параллельными осями, кривошип-стойка, кривошип-шатун, и при этом перпендикулярными оси вращательной пары камень-шатун, которая в свою очередь перпендикулярна оси винтовой пары камень-винт, отличающееся тем, что в нем установлена кулиса и качающийся ползун, образующие поступательную пару с осью движения, перпендикулярной оси вращательной пары стойка-качающийся ползун, которая параллельна оси пары кривошип-стойка, при этом кулиса с винтом образует вращательную пару, соосную паре камень-винт, а со стойкой - двухподвижную кинематическую пару.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 2008 |
|
RU2369430C1 |
| Устройство для перемешивания жидкостей | 1975 |
|
SU617058A1 |
| Смеситель | 1978 |
|
SU781071A1 |
| Смеситель для вязких жидкостей | 1978 |
|
SU841663A1 |
| Мешалка | 1979 |
|
SU863378A1 |
| Смеситель | 1979 |
|
SU876451A2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1994 |
|
RU2067535C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ | 1996 |
|
RU2113897C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ МАТЕРИАЛОВ | 1998 |
|
RU2147516C1 |
| US 3602485 А, 31.08.1971. | |||

