Изобретение относится области метрологии, и может быть использовано для поверки индикаторов часового типа и измерительных головок с использованием машинного зрения.
Известен прибор i-Checker (https://fgis.gost.ru/fundmetrology/ registry/4/items/816327) для поверки измерительных головок и датчиков (далее по тексту - приборы) предназначен для измерений линейных перемещений при поверке и калибровке измерительных головок, датчиков линейных перемещений, рычажно-зубчатых головок (опционально) и нутромеров (опционально).
Принцип действия прибора основан на преобразовании линейных перемещений измерительного наконечника в цифровой сигнал, который передается на экран монитора для дальнейшей обработки.
Прибор представляет собой прибор настольного типа в виде вертикальной колонны с направляющими для перемещения держателя головок и измерительной системы с наконечником. Поверяемая головка и измерительная система устанавливаются в соответствии с принципом Аббе. Процедура поверки осуществляется с помощью программного обеспечения. Установка поверяемых средств измерений производится с помощью вертикальных направляющих. Измерение осуществляется методом непосредственной оценки. Результаты измерений выводятся на экран монитора для дальнейшей обработки.
Недостатком известного прибора является работа в полуавтоматическом режиме, что влияет на скорость поверки.
Известен способ автоматического считывания показаний стрелочных приборов и устройство, реализующее этот способ (патент RU №2604116, опубл. 10.12.2016). Устройство, реализующее известный способ содержит электронно-вычислительное устройство, в памяти которого создают модель стрелочного прибора. При помощи микрометрической головки воздействуют на стрелочный прибор, получают текущее изображение прибора с помощью web-камеры.
Недостатком известного прибора является ручная настройка показаний шкалы стрелочных приборов, что влияет на точность считывания показаний.
Известен также прибор ППИ-50 для поверки индикаторов часового типа, рычажно-зубчатых индикаторов ИРБ и нутромеров индикаторных (Каталог ООО Инженерно-метрологический центр «МИКРО», https://imcmikro.ru/produkciya/pribor-dlya-poverki-indikatorov-ppi-50-4-razryad), выбранный в качестве прототипа. Прибор состоит из компаратора с цифровой камерой, компьютера и оснастки для поверки. Цифровая видеокамера передает в увеличенном виде изображение шкалы поверяемого индикатора на монитор компьютера для исключения параллакса. Поверитель совмещает на мониторе стрелку индикатора с соответствующим штрихом шкалы согласно указаниям компьютера и вводит информацию в компьютер. В программу компьютера заложены методики поверки на каждое согласно нормативной документации. По результатам поверки выводится на печать протокол поверки и кривая погрешности поверяемого индикатора.
Однако недостатком известного прибора является его работа в ручном режиме, что влияет на скорость поверки.
Задача заявляемого изобретения заключается в создании прибора для автоматической поверки индикаторов часового типа и измерительных головок с применение машинного зрения.
Технический результат, достигаемый изобретением, заключается:
1. в автоматизации поверки, за счет совокупности существенных признаков и связей между ними, характеризующих заявляемое изобретение, позволяющих осуществлять автоматическое перемещение штока и эталонного преобразователя, входящих в компаратор прибора и реализовать разработанную заявителем специализированную программу для автоматического сравнения сигналов с эталонного преобразователя, и сигналов, считываемых со шкалы поверяемого индикатора часового типа и измерительной головки без участия поверителя, что приводит к ускорению процесса поверки;
2. в повышении точности результатов поверки, за счет исключения погрешностей связанных с особенностью индикаторов часового типа и измерительных головок - несовпадение центра шкалы и оси стрелки.
Заявленный технический результат достигается за счет того, что в приборе для автоматической поверки индикаторов часового типа и измерительных головок с применением машинного зрения, содержащим компаратор и компьютер, согласно изобретению, прибор снабжен камерой для машинного зрения, а упомянутый компаратор, состоит из сервоусилителя, соединенного с соответствующими входом и выходом компьютера, другой вход и выход сервоусилителя соединен с серводвигателем, связанным через зубчатую передачу с модулем линейного перемещения, на котором расположена каретка с закрепленным на ней штоком, представляющим вал, один торец которого контактирует с эталонным преобразователем, а другой торец контактирует с индикатором, при этом выход эталонного преобразователя соединен с одним их входов компьютера, который также соединен с камерой для машинного зрения, а один из входов сервоусилителя соединен с энкодером.
Сущность изобретения поясняется чертежами, где:
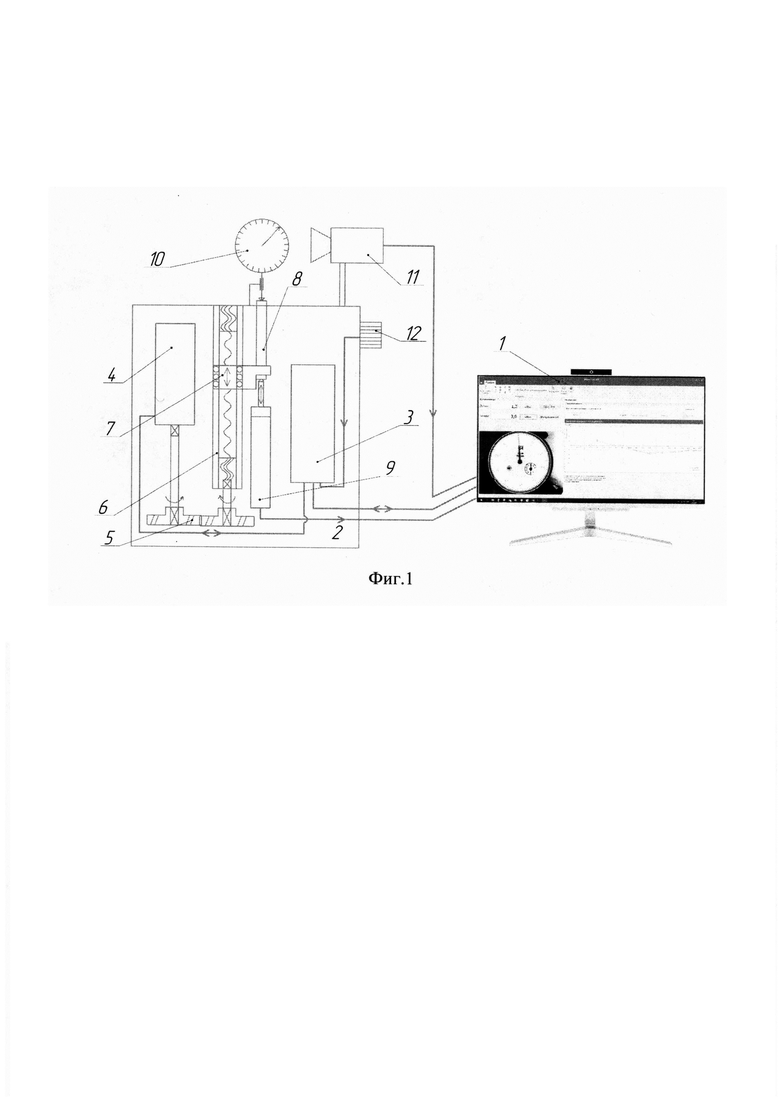
на фиг.1 - представлена блок схема заявляемого прибора;
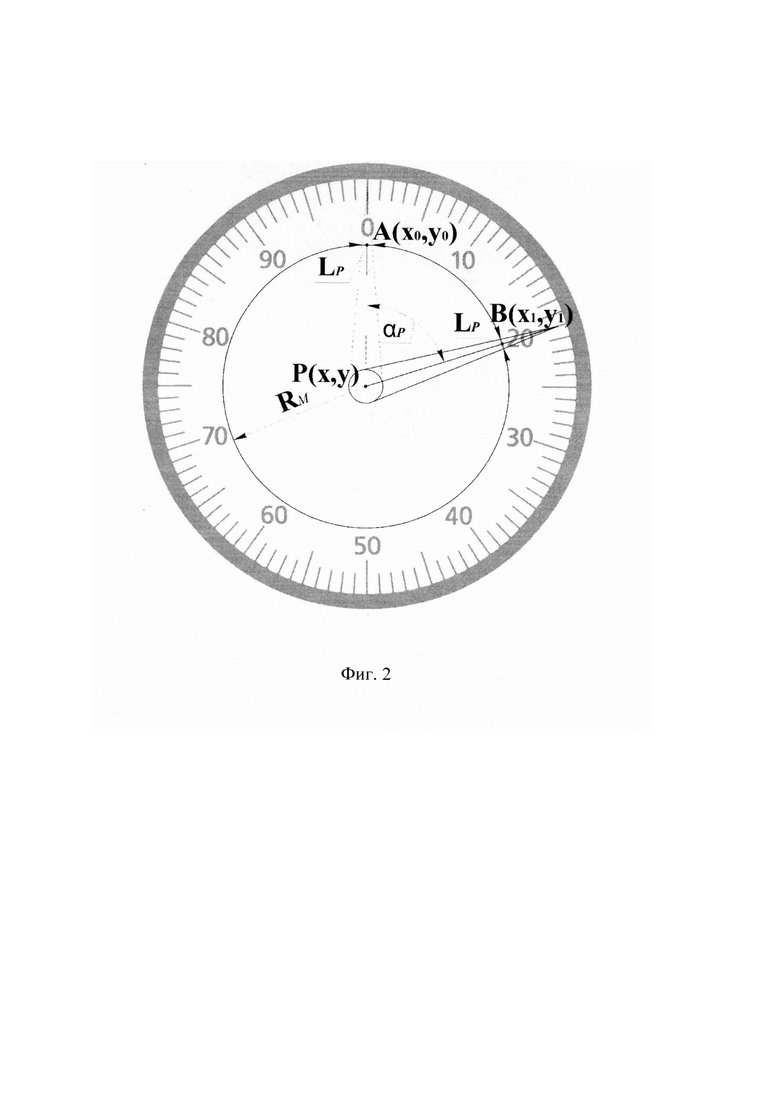
на фиг.2 - угловые расстояния между элементами прибора.
Прибор для автоматической поверки индикаторов часового типа и измерительных головок с применением машинного зрения (фиг.1) содержит компьютер 1, компаратор 2, состоящий из сервоусилителя 3, например, HIWIN D2T-0123-S-A4, соединенного с соответствующими входом и выходом компьютера 1, другой вход и выход сервоусилителя 3 соединен с серводвигателем 4,, например, HIWIN FRLS05206A4C, который связан через зубчатую передачу 5 с модулем линейного перемещения 6,, например, HIWIN КК5002С-200А2-Н0 на котором расположена каретка 7 с закрепленным на ней штоком 8, представляющим вал, один торец которого контактирует с эталонным преобразователем 9, например, JIHP-16D, а другой торец контактирует с индикатором 10, например, ИЧ-10 при этом выход эталонного преобразователя 9 соединен с одним их входов компьютера 1, который также соединен с камерой для машинного зрения 11, например, Basler acA3800-14um, а один из входов сервоусилителя 3 соединен с энкодером 12.
Прибор для автоматической поверки индикаторов часового типа и измерительных головок с применением машинного зрения работает следующим образом.
В приборе используется дифференциальный метод. Сравнение значений с эталонного преобразователя и значений, полученных в результате распознавания изображения шкалы индикатора и измерительной.
Специальное программное обеспечение компаратора 2 разработано заявителем и установлено в компьютере. Программное обеспечение состоит из 3 частей:
- первая часть отвечает за автоматическое перемещение штока 8;
- вторая часть отвечает за распознавание изображения шкалы индикатора 10 или измерительной головки, полученного с камеры для машинного зрения 11;
- третья часть отвечает за обработку и отображение результата поверки.
Программное обеспечение позволяет:
- выводить данные с эталонного преобразователя 9 на экран компьютера 1;
- распознавать изображение шкалы поверяемого индикатора 10 и выводить данные на экран компьютера 1;
- проводить поверку выбранного индикатора 10;
- формировать результат и выдавать протокол.
Работа с программой осуществляется по следующему алгоритму.
1. Запуск программы: открывается главное меню компьютера 1 с окнами на экране. На экране отображаются: изображение с камеры для машинного зрения 11, окно с данными, полученными с эталонного преобразователя 9 и окно с данными, полученными в результате распознавания с камеры для машинного зрения 11. Данные представляют собой численное значение в единицах - микрометры.
2. В главном меню компьютера 1 при нажатии, кнопки «Начать новую поверку» открывается список, в котором выбирается тип поверяемого индикатора 10.
3. После выбора типа поверяемого индикатора 10, на экране компьютера 1 открывается окно с заданиями, выполнение которых требует методика поверки.
4. На компаратор 2 устанавливается индикатор 10 в касание со штоком 8, настраивается камера для машинного зрения 11, чтобы шкала индикатора 10 помещалась в поле зрения камеры для машинного зрения 11.
5. С помощью энкодера 12 выставляют положение стрелки индикатора 10 на нулевое значение. При вращении энкодера 12 поступает сигнал в сервоусилитель 3, который дает команду серводвигателю 4. Серводвигатель 4 через зубчатую передачу 5 приводит в движение модуль линейного перемещения 6, по которому перемещается каретка 7 со штоком 8. Шток 8, представляющий вал, один торец которого контактирует с эталонным преобразователем 9, а другой торец контактирует с индикатором 10. При перемещении штока 8, перемещается наконечник индикатора 10 и приводит в движение стрелку индикатора 10.
6. При нажатии кнопки обнулить, обнуляются показания в окнах с данными от эталонного преобразователя 9 и данными от распознавания с камеры для машинного зрения 11.
7. Выбирается и запускается задание. Начинается автоматическая работа первой части программного обеспечения. Сигнал с компьютера 1 поступает на сервоусилитель 3, который дает команду серводвигателю 4. Серводвигатель 4 через пару зубчатых колес 5 приводит в движение модуль линейного перемещения 6, по которому перемещается каретка 7 со штоком 8. Шток 8 одним торцом касается наконечника индикатора 10, при перемещении штока 8, перемещается наконечник индикатора 10 и приводит в движение стрелку. Шток 8 другим торцом контактирует с наконечником эталонного преобразователя 9 и перемещает его.
8. После запуска задания запускается и вторая часть программного обеспечения. Обработка состоит из этапов частей.
- Первый, подготовительный этап запускается в начале процесса измерения для выполнения разовых и наиболее ресурсоемких операций:
- получение из базы данных в программном обеспечении - диапазона измерений шкалы Nr в мкм;
- поиск на кадре окружности, которая будет построена по вершинам маленьких штрихов шкалы. По ней определяются координаты центра шкалы  (Фиг. 2).
(Фиг. 2).
- относительно центра  определяется окружность максимального радиуса
определяется окружность максимального радиуса  в которой минимум точек черного цвета (минимальное количество или отсутствие надписей и штрихов на шкале). Именно по этой окружности в измерительной части будет выполняться предварительный поиск положения стрелки и определяется ширина стрелки
в которой минимум точек черного цвета (минимальное количество или отсутствие надписей и штрихов на шкале). Именно по этой окружности в измерительной части будет выполняться предварительный поиск положения стрелки и определяется ширина стрелки  Шириной стрелки будет хорда, проходящая через дугу, которая образована пересечением стрелки и окружности;
Шириной стрелки будет хорда, проходящая через дугу, которая образована пересечением стрелки и окружности;
- по начальному положению стрелки, соответствующему нулевому штриху, на  определяется координата середины этой дуги - середины стрелки
определяется координата середины этой дуги - середины стрелки 
- по координатам положения стрелки  и координатам центра шкалы
и координатам центра шкалы  строится линия шириной в 1 пиксель. Эта линия задает нулевое положение стрелки.
строится линия шириной в 1 пиксель. Эта линия задает нулевое положение стрелки.
Второй этап - измерительный, выполняется для каждого кадра с камеры для машинного зрения 11 в реальном времени (Фиг. 1). Она содержит следующие операции:
- поиск дуги на пересечении стрелки и окружности с радиусом  (Фиг. 2) для текущего положения стрелки и находятся координаты середины этой дуги
(Фиг. 2) для текущего положения стрелки и находятся координаты середины этой дуги 
- по координатам  и координатам
и координатам  строится линия соответствующая текущему положению стрелки и определяется угол ее наклона - угол наклона виртуальной стрелки αP;
строится линия соответствующая текущему положению стрелки и определяется угол ее наклона - угол наклона виртуальной стрелки αP;
- вычисляются показания по формуле: 
9. И последняя, третья часть программного обеспечения, обработка данных, полученных от эталонного преобразователя 9 и из второй части программного обеспечения (п.8 настоящего описания).
10. Выдается результат из 9 пункта настоящего описания и формируется протокол. Таким образом заявляемый прибор является универсальным, позволяющим:
- учитывать особенность индикаторов и измерительных головок: несовпадение центра шкалы и оси стрелки, приводящее к погрешности, исключить эту погрешность в получаемых результатах, за счет применения алгоритма распознавания, применяемого в машинном зрении, используя виртуальную стрелку, которая строится через центр шкалы и кончик реальной стрелки;
- автоматизировать весь процесс поверки индикаторов часового типа и измерительных головок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЬНОГО УСИЛИЯ И ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ ГОЛОВОК | 2018 |
|
RU2687891C1 |
| Установка для поверки автоцистерн | 2024 |
|
RU2832400C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| Устройство для поверки механических секундомеров | 1990 |
|
SU1800443A1 |
| УСТАНОВКА ПОВЕРОЧНАЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ АВТОМАТИЗИРОВАННАЯ И СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВЕРТИКАЛЬНЫХ УСТАНОВОК ДЛЯ МЕТРОЛОГИЧЕСКОЙ АТТЕСТАЦИИ ДВУХ УРОВНЕМЕРОВ ОДНОВРЕМЕННО | 2012 |
|
RU2495384C1 |
| Установка для автоматической поверки электроизмерительных приборов | 1989 |
|
SU1714547A1 |
| Устройство для поверки стрелочных приборов с круговой шкалой | 1983 |
|
SU1174740A1 |
| СИСТЕМА АВТОМАТИЗАЦИИ КАЛИБРОВКИ И ПОВЕРКИ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ С УПРАВЛЕНИЕМ ОТ КОМПЬЮТЕРА | 2009 |
|
RU2425411C1 |
| ЭТАЛОННОЕ УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ РАЗМЕРА ЕДИНИЦЫ СРЕДНЕЙ МОЩНОСТИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, ПОВЕРКИ И КАЛИБРОВКИ СРЕДСТВ ИЗМЕРЕНИЙ СРЕДНЕЙ МОЩНОСТИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ, ОПТИЧЕСКИХ АТТЕНЮАТОРОВ И ИСТОЧНИКОВ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ В ВОЛОКОННО-ОПТИЧЕСКИХ СИСТЕМАХ ПЕРЕДАЧИ | 2004 |
|
RU2271522C1 |
| АВТОМАТИЧЕСКАЯ УСТАНОВКА ДЛЯ МЕТРОЛОГИЧЕСКИХ | 1971 |
|
SU310205A1 |
Изобретение относится области метрологии, и может быть использовано для поверки индикаторов часового типа и измерительных головок с использованием машинного зрения. Для этого прибор снабжен камерой для машинного зрения, а упомянутый компаратор, состоит из сервоусилителя, соединенного с соответствующими входом и выходом компьютера, другой вход и выход сервоусилителя соединен с серводвигателем, связанным через зубчатую передачу с модулем линейного перемещения, на котором расположена каретка с закрепленным на ней штоком, представляющим вал, один торец которого контактирует с эталонным преобразователем, а другой торец контактирует с индикатором, при этом выход эталонного преобразователя соединен с одним их входов компьютера, который также соединен с камерой для машинного зрения, а один из входов сервоусилителя соединен с энкодером. Технический результат - повышение точности результатов поверки и ускорение процесса поверки, за счет автоматизации. 2 ил.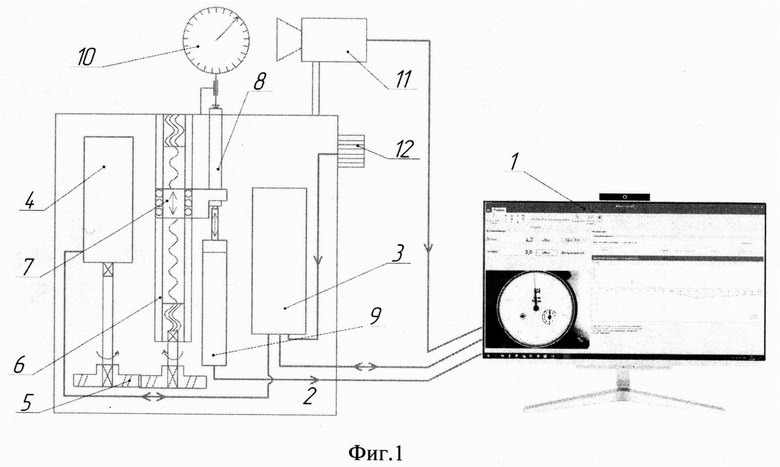
Прибор для автоматической поверки индикаторов часового типа и измерительных головок с применением машинного зрения, содержащий компаратор и компьютер, отличающийся тем, что прибор снабжен камерой для машинного зрения, а упомянутый компаратор, состоит из сервоусилителя, соединенного с соответствующими входом и выходом компьютера, другой вход и выход сервоусилителя соединен с серводвигателем, связанным через зубчатую передачу с модулем линейного перемещения, на котором расположена каретка с закрепленным на ней штоком, представляющим вал, один торец которого контактирует с эталонным преобразователем, а другой торец контактирует с индикатором, при этом выход эталонного преобразователя соединен с одним их входов компьютера, который также соединен с камерой для машинного зрения, а один из входов сервоусилителя соединен с энкодером.
| Устройство для поверки индикаторов | 1988 |
|
SU1501669A1 |
| Устройство для поверки индикаторов | 1984 |
|
SU1179089A1 |
| WO 2018012958 A1, 18.01.2018 | |||
| CN 106568359 A, 19.04.2017 | |||
| Прибор для измерения плотности жидкостей | 1937 |
|
SU57927A1 |
| Планетарная мельница непрерывного действия | 1984 |
|
SU1313502A1 |
