Группа изобретений относится к области измерительной техники и может быть использована для метрологической аттестации уровнемеров (датчиков уровня), например систем измерительных «СТРУНА».
Под метрологической аттестацией подразумевается проведение градуировки, калибровки и поверки уровнемеров.
Градуировка средств измерений - метрологическая операция, при помощи которой средство измерения (в данном случае - уровнемер) снабжают шкалой или градуировочной таблицей (кривой), отражающей зависимость выходного сигнала от физической величины (в данном случае - уровня).
Калибровка - это определение и подтверждение действительных значений метрологических характеристик, введение необходимых поправок для соответствия между эталонной величиной (в данном случае отсчета на установке поверочной линейных перемещений автоматизированной) и величиной на выходе измерительного прибора (в данном случае уровнемера).
Поверка - совокупность операций, выполняемых с целью определения и подтверждения соответствия средств измерений (в данном случае - уровнемеров) установленным техническим требованиям.
Известно множество устройств, позволяющих производить метрологическую аттестацию уровнемеров. Так, например, известен ряд устройств, в которых производится непосредственное погружение уровнемера в жидкость.
Примером такой установки является установка поверочная уровнемерная АГТ 244, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 35765-07. Установка представляет собой металлическую емкость с приваренным фланцем, с установленными на нем крепежными шпильками, имитирующим штатное посадочное место уровнемера. Установка снабжена указателем уровня жидкости, состоящим из прозрачной пластиковой трубки, соединенной с емкостью и измерительной линейкой, изготовленной из измерительной ленты рулетки 2 класса с пределами основной погрешности ±1,35 мм по ГОСТ 7502-98. Установка имеет трубопроводы и запорную арматуру для налива и слива жидкости, а также трубопровод, предотвращающий переполнение емкости. Снизу, на раме емкости, установлены четыре винтовых опоры, позволяющие регулировать положение плоскости фланца в вертикальном направлении, и положение измерительной линейки относительно отверстия фланца в горизонтальном направлении. Принцип действия основан на непосредственном изменении уровня измеряемой жидкости (воды технической) в емкости установки при помощи трубопроводов и запорной арматуры.
Достоинством установки является тот факт, что поверка уровнемера осуществляется в рабочем вертикальном положении, однако она имеет невысокую точность измерения - величина основной допускаемой погрешности измерений составляет ±6 мм. Процесс поверки на такой установке занимает много времени и не поддается автоматизации из-за визуального считывания показаний с измерительной линейки.
Другим примером является установка поверочная уровнемерная УПУ-8000, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 40184-08, состоящая из двух резервуаров испытательных, бака для рабочей жидкости, насоса, устройства подъема и опускания испытываемого изделия, уровнемера образцового, контрольно-измерительной аппаратуры и предназначенная для проведения поверки, настройки, приемо-сдаточных и периодических испытаний поплавковых и индукционных уровнемеров методом непосредственного сличения с показаниями образцового уровнемера «Система измерительная «СТРУНА», входящего в состав установки и зарегистрированного в Государственном реестре средств измерений под номером 28116-04. Эта установка является более точной и погрешность измерения уровня в резервуаре определяется параметрами эталонной «Системы измерительной «СТРУНА», а именно ±1 мм. Установка обладает в основном теми же достоинствами и недостатками, что и предыдущая система, т.е. достоинством установки является тот факт, что поверка уровнемера осуществляется в рабочем вертикальном положении, а недостатком, что процесс поверки на такой установке занимает много времени из-за налива жидкости в резервуар и последующего ее слива при каждом измерении. Кроме этого установка не позволят аттестовать точные уровнемеры, так как рекомендуемое соотношение между допускаемыми погрешностями образцового и поверяемого уровнемера должно быть не менее чем 1:3.
Аналогично устроен поверочный стенд по патенту CN 200820154368 Y 20090812 (EN) G01F 25/00 (2006.01), представляющий собой прямоугольный резервуар, в котором по углам установлены четыре контрольных датчика уровня, а поверяемый уровнемер устанавливается на фланце в центре резервуара. За счет сигналов с четырех контрольных датчиков уровня производится компенсация колебаний жидкости на поверхности резервуара в короткий промежуток времени, что приводит к более точным измерениям, чем при одном контрольном датчике. Однако этот стенд обладает теми же преимуществами и недостатками, что и ранее описанная установка УПУ-8000, а именно, достоинством установки является тот факт, что поверка уровнемера осуществляется в рабочем вертикальном положении, а недостатком, что процесс поверки на такой установке занимает много времени из-за налива жидкости в резервуар и последующего ее слива при каждом измерении.
Более высокой точностью измерений обладает установка поверочная уровнемерная ИК-1, предназначенная для поверки и испытаний метроштоков электронных ЭМ-0301, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 26921-04.
Установка поверочная уровнемерная ИК-1 состоит из следующих основных составных частей:
- устройства измерений перемещения поверяемого метроштока электронного ЭМ-03 01,
- прецизионного устройства перемещения поверяемого метроштока электронного ЭМ-0301,
- измерительного резервуара,
- резервуара хранения поверочной жидкости,
- насосного агрегата,
- устройства поддержания постоянного уровня в измерительном резервуаре,
- персонального компьютера.
Прецизионное устройство перемещения метроштока электронного ЭМ-0301 состоит из шагового двигателя с редуктором, служащего для привода мерного ролика с металлической лентой, каретки для крепления на ней поверяемого метроштока электронного ЭИ-0301, которая перемещается в вертикальной плоскости по цилиндрическим направляющим с помощью ленты и управляющего блока.
Управляющий блок состоит из компьютера с программным обеспечением и системы управления шаговым двигателем.
В устройстве измерений перемещения поверяемого метроштока электронного ЭМ-0301 в качестве средств измерений используется комплект из двух штангенциркулей по ГОСТ 166-89 и микрометрический индикатор касания.
Устройство поддержания постоянного уровня в измерительном резервуаре при погружении в него метроштока электронного ЭМ-0301 состоит из камеры перелива с дренажным отверстием, соединенным с резервуаром хранения поверочной жидкости.
С помощью компьютера задается количество импульсов, поступающих на шаговый двигатель, который начинает опускать метрошток электронный ЭМ-0301 в измерительный резервуар, при этом вытесненное метроштоком электронным ЭМ-0301 трансформаторное масло MB ТУ381.01.857-80 перетекает в переливную камеру. В заданных точках определяется величина погружения (перемещения) метроштока электронного ЭМ-0301.
По окончанию цикла измерений ЭМ-0301 поднимают в исходное положение, включается насосный агрегат, который перекачивает масло в измерительный резервуар.
Достоинством установки является тот факт, что поверка метроштока осуществляется в рабочем вертикальном положении. Пределы допускаемой абсолютной погрешности измерений данной установки ±0,3 мм, однако, процесс поверки на такой установке занимает много времени и не поддается автоматизации. После окончания поверки метрошток надо отмывать от масла, что неудобно.
Кроме непосредственного погружения уровнемеров в жидкость используются методы имитации уровня путем механического передвижения поплавка вдоль уровнемера.
Примером такого решения является установка УПУ 1500, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 22818-02.
Установка представляет собой рабочий стол, на столешнице которого уложена рулетка металлическая измерительная Р20Н2Г по ГОСТ 7502-98, лента которой закреплена скобой к переднему торцу столешницы. Натяжение ленты измерительной рулетки осуществляется грузом, входящим в комплект рулетки. Головка уровнемера закрепляется в устройстве для ее крепления. Уровнемер укладывается на опоры с выдвижными поперечными пальцами для пропуска поплавка при его передвижении вдоль оболочки уровнемера. Для натяжения уровнемера гибкой конструкции имеется груз, который соединяется тросом, перекинутым через ролик, с ограничителем хода поплавка уровнемера. Ролик свободно вращается на оси кронштейна, закрепленного на заднем торце столешницы. Отсчет положения поплавка (уровня) на рулетке металлической измерительной Р20Н2Г производится по указателю положения (стрелке), установленному на поплавок.
Пределы допускаемой абсолютной погрешности измерений данной установки ±5 мм. Недостатки этой установки следующие:
- нельзя автоматизировать из-за наличия опор, на которые уложен уровнемер, а поплавок должен перемещаться вдоль уровнемера;
- низкая точность (±5 мм);
- из-за ручного труда велика вероятность ошибки оператора;
- из-за наличия опор невозможна метрологическая аттестация с малым шагом;
- из-за частых сотрясений уровнемера при установке поплавка в градуировочных точках затягивается процесс градуировки (поверки), так как струна в магнитострикционном уровнемере после перемещения поплавка долго колеблется и создается помеха рабочему сигналу;
- уровнемер аттестуется в нерабочем положении (рабочее положение - вертикальное).
Более высокой точностью обладает установка поверочная уровнемерная УПУ, предназначенная для испытаний и первичной поверки уровнемеров «Струна-М», изготовленных по ТУ 4213-002-23434764-97 и систем измерительных «СТРУНА», изготавливаемых по ТУ 4210-001-23434764-2004, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 31696-06.
Конструктивно установка поверочная уровнемерная УПУ выполнена на станине из стальных швеллеров шириной 120 мм и общей длиной 5200 мм сваренных между собой последовательно и размещенных на опорах. На одном краю установки УПУ смонтирован упор, являющийся нулевой отметкой для поверяемых уровнемеров. На последовательно расположенных специальных опорах, на расстоянии 250 мм друг от друга, закреплены промежуточные упоры - «измерительные ножи». Задние, по отношению к нулевой отметке, плоскости «измерительных ножей» служат отметками задания уровня при поверке уровнемеров «Струна-М» и систем измерительных «СТРУНА», к которым прижимается поплавок аттестуемого уровнемера.
За счет точной фиксации измерительных ножей установка УПУ имеет пределы допускаемой абсолютной погрешности измерений ±0,2 мм.
Однако она обладает недостатками, аналогичными ранее описанной установке УПУ 1500, а именно:
- нельзя автоматизировать процесс метрологической аттестации из-за наличия опор, на которые уложен уровнемер, а поплавок должен перемещаться вдоль уровнемера;
- из-за ручного труда велика вероятность ошибки оператора;
- из-за наличия опор невозможна метрологическая аттестация с малым шагом;
- из-за частых сотрясений уровнемера при установке поплавка в градуировочных точках затягивается процесс градуировки (поверки), т.к. струна в магнитострикционном уровнемере после перемещения поплавка долго колеблется и создается помеха рабочему сигналу;
- уровнемер градуируется (поверяется) в нерабочем положении (рабочее положение - вертикальное).
Аналогичной конструкцией и недостатками обладает установка поверочная уровнемерная УЭУм, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 39199-08. Эта установка отличается от вышеописанной возможностью градуировки более длинных уровнемеров, и обладает теми же недостатками, что и установка поверочная уровнемерная УПУ.
Высокая точность измерений может быть достигнута на стендах для поверки и калибровки цифровых нивелиров и штрихкодовых реек, описанных в патентах RU №2419070 C2, GO1C 5/00, GO1C 25/00 от 28.11.2008 и RU №2419766 C1, G01C 5/00, G01C 25/00 от 01.12.2009.
Стенды предназначены для метрологической поверки и калибровки геодезических приборов. На изолированном от пола фундаменте установлены столбы, на которых укреплены направляющие рельсы. По рельсам перемещается каретка с отражателем лазерного интерферометра, поверяемой и эталонной штрихкодовыми рейками. Рейки расположены соосно и жестко соединены пятками навстречу друг другу через блок эталонных концевых мер длины.
Данные стенды имеют иное назначение, чем поверка уровнемеров, но даже в случае переоборудования для метрологической аттестации уровнемеров они будут обладать теми же недостатками, что и другие стенды с горизонтальной конструкцией. Однако использование лазерного интерферометра существенно повышает точность измерений и является достоинством данных стендов.
Наиболее близкой по технической сущности к заявляемому устройству является установка УПУ 1500М, внесенная в Государственный реестр средств измерений и зарегистрированная под номером 45416-10, предназначенная для поверки в лабораторных условиях уровнемеров У1500, У1500М, Y1500M-DIN гибкой и жесткой конструкции с пределами допускаемой абсолютной погрешности ±3 мм и выше, диапазоном измерения до 16 м, при их выпуске из производства и эксплуатации, методом имитации уровня.
Установка УПУ 1500М представляет собой рабочий стол, который состоит из скрепленных между собой прямоугольных алюминиевых профилей и закреплен с помощью кронштейнов к стене помещения лаборатории. Стол предназначен для размещения на нем испытуемого уровнемера, крепления измерительной ленты рулетки и П-образных направляющих полозьев для плавного перемещения по ним подвижной каретки. Подвижная каретка предназначена для изменения положения указателя каретки (стрелки) и закрепленного магнита над чувствительным элементом датчика уровнемера, имитируя перемещение поплавка. Каретка состоит из кронштейна с закрепленным магнитом, указателя положения каретки (стрелки), увеличительной линзы и роликов, обеспечивающих легкое перемещение по направляющим рабочего стола.
Основной составляющей частью установки УПУ 1500М является рулетка типа Р20Н2Г, ГОСТ 7502-98, измерительная лента которой закреплена на столе установки параллельно испытуемому уровнемеру. Измерительная лента рулетки типа Р20Н2Г служит для снятия показаний положения имитатора поплавка уровнемера. Натяжное устройство предназначено для обеспечения прямолинейного положения на столе установки УПУ 1500М уровнемеров с гибким чувствительным элементом и состоит из гибкого троса, закрепленного с одной стороны к концу уровнемера, перекинутого через кронштейн с роликом и подвески с грузом, прикрепленной ко второму концу троса. Установка УПУ 1500М работает по принципу имитации уровня механическим передвижением каретки со стрелкой вдоль оболочки уровнемера. Отсчет положения на измерительной рулетке типа Р20Н2Г производится по указателю положения стрелки, установленной на подвижной каретке.
Пределы абсолютной погрешности измерений установки типа УПУ 1500М ±1 мм.
Преимущества установки типа УПУ 1500М следующие:
- непрерывное перемещение каретки позволят сделать с определенным шагом градуировку и поверку по всей длине уровнемера;
- магнит, имитирующий поплавок, не касается уровнемера, что исключает колебание чувствительного элемента в процессе метрологической аттестации.
Однако она обладает рядом существенных недостатков:
- установка типа УПУ 1500М прикрепляется к стене помещения, что при изменении температуры в помещении может привести к деформации установки и существенному ухудшению точности измерений;
- уровнемер градуируется (поверяется) в нерабочем положении (рабочее положение - вертикальное);
- нельзя автоматизировать процесс измерений из-за визуального считывания показаний;
- из-за горизонтального положения уровнемера происходит его прогиб, что дает существенную ошибку измерений;
- замена поплавка на имитирующий магнит приводит к ошибке, связанной с тем, что в каждом поплавке существует разброс установки магнита внутри поплавка (до нескольких миллиметров), что приведет к ошибке в работе уровнемера при его эксплуатации; для обеспечения высокой точности измерений уровнемера он должен пройти метрологическую аттестацию совместно со штатным поплавком;
- установка типа УПУ 1500М, как и все ранее описанные установки и стенды позволяет производить метрологическую аттестацию единовременно только одного уровнемера;
- в установке типа УПУ 1500М, как и во всех ранее описанных установках и стендах отсутствует коррекция изменения длины установки от температуры окружающей среды.
Задачей, на решение которой направлено изобретение является снижение погрешности в процессе метрологической аттестации уровнемеров до величины ±0,1 мм, автоматизация процесса метрологической аттестации, возможность метрологической аттестации двух уровнемеров одновременно в рабочем (вертикальном) положении.
Поставленная задача достигается за счет того, что в установку поверочную линейных перемещений автоматизированную, предназначенную для метрологической аттестации уровнемеров, состоящую из вертикально расположенной рамы из алюминиевого профиля, не прикрепляемой к стенам, с точной вертикальной установкой, в нижней части рамы на направляющей привода установлена неподвижная платформа, являющаяся нулевой отметкой для уровнемеров, на направляющей привода располагается приводная рабочая каретка с возможностью перемещения с помощью линейного привода, управление которым возможно с помощью блока управления, обеспечивающего работу серводвигателя по командам от компьютера, при этом программное обеспечение, установленное на компьютере, выполнено с возможностью реализации перемещения приводной рабочей каретки в заданное в программе положение с заданной скоростью, дополнительно введены сдвоенное устройство фиксации поплавков на подвижной рабочей каретке, пневматическое устройство «параллельного захвата» с возможностью закрепления и центрирования двух уровнемеров в вертикальной плоскости, в качестве устройства измерения перемещения приводной каретки используется датчик линейных перемещений, мерная лента которого приклеена на направляющей привода, в основу работы датчика линейных перемещений положен принцип фотоэлектрического считывания штрихов, равномерно нанесенных на мерную ленту, с помощью считывающей головки, расположенной на подвижной рабочей каретке, выходной сигнал с датчика линейных перемещений является управляющим сигналом для перемещения приводной рабочей каретки с закрепленными на ней поплавками с заданным шагом вдоль установленных уровнемеров, причем, из-за возможных наклонов подвижной рабочей каретки, позиционирование последней при перемещении вдоль направляющей привода реализовано по одной стороне для одного уровнемера, а позиционирование каретки для второго уровнемера высчитывается с помощью управляющей программы с учетом поправок, вдоль рамы установлены датчики температуры, предназначенные для компенсации изменения длины направляющей привода и ее изгиба в зависимости от колебаний температуры в помещении, а также за счет использования способа повышения точности вертикальных установок для метрологической аттестации двух уровнемеров одновременно, заключающегося в том, что с помощью квадранта оптического обеспечивают вертикальное положение установки на бетонной подушке и горизонтальное положение неподвижной платформы и подвижной рабочей каретки в нижнем положении, при этом рама установки не соприкасается со стенами помещения, снижают температуру в помещении до минимального значения рабочего диапазона температур, с помощью лазерного интерферометра производят контроль значений уровня для одной стороны рабочей каретки, вводят поправки, устраняющие расхождения показаний лазерного интерферометра и установки и производят контрольный проход по всей высоте установки с их учетом, с помощью лазерного интерферометра снимают значения уровня по второй стороне подвижной рабочей каретки с учетом поправок по первой стороне, определяют несоответствия показаний по второй стороне по отношению к показаниям лазерного интерферометра и вводят поправки, устраняющие эти несоответствия, производят контрольный проход подвижной рабочей каретки по всей высоте установки, при котором определяют расхождение показаний лазерного интерферометра и установки, после чего температуру в помещении повышают до максимального значения рабочего диапазона температур и производят контрольный проход по всей высоте установки с применением лазерного интерферометра для каждой из сторон подвижной рабочей каретки, для каждой из которых определяют зоны диапазона перемещения подвижной рабочей каретки с одинаковыми температурными коэффициентами, вычисляют эти коэффициенты для каждой зоны и каждой стороны подвижной рабочей каретки и вводят в программу, производят контрольный проход с использованием лазерного интерферометра с учетом поправок при минимальной и максимальной температуре, после чего для точного определения начального положения отсчета с помощью глубиномера измеряют смещение верхней плоскости подвижной рабочей каретки относительно нижней плоскости неподвижной платформы, являющейся точкой отсчета для уровнемеров, для левой и правой сторон подвижной рабочей каретки, и вводят данные смещения в программу, в процессе работы из-за возможных наклонов подвижной рабочей каретки непосредственное позиционирование каретки производят по одной стороне для одного уровнемера, а позиционирование подвижной рабочей каретки для второго уровнемера высчитывают с помощью управляющей программы с учетом поправок.
Техническим результатом является создание установки поверочной линейных перемещений автоматизированной, позволяющей производить метрологическую аттестацию двух датчиков уровня одновременно с погрешностью не более ±0,1 мм по всей длине уровнемера в непрерывном режиме с минимальным шагом 1 мм и длине уровнемера до 4000 мм.
Малая погрешность измерений обеспечивается как конструкцией установки поверочной линейных перемещений автоматизированной, так и способом повышения точности позиционирования вертикальных установок для метрологической аттестации двух уровнемеров одновременно.
Указанные свойства получены благодаря тому, что введены сдвоенное устройство фиксации поплавков на подвижной рабочей каретке, пневматическое устройство «параллельного захвата» с возможностью закрепления и центрирования двух уровнемеров в вертикальной плоскости, в качестве устройства измерения перемещения приводной каретки используется датчик линейных перемещений, мерная лента которого приклеена на направляющей привода, в основу работы датчика линейных перемещений положен принцип фотоэлектрического считывания штрихов, равномерно нанесенных на мерную ленту, с помощью считывающей головки, расположенной на подвижной рабочей каретке, выходной сигнал с датчика линейных перемещений является управляющим сигналом для перемещения приводной рабочей каретки с закрепленными на ней поплавками с заданным шагом вдоль установленных уровнемеров, причем, из-за возможных наклонов подвижной рабочей каретки, позиционирование последней при перемещении вдоль направляющей привода реализовано по одной стороне для одного уровнемера, а позиционирование каретки для второго уровнемера высчитывается с помощью управляющей программы с учетом поправок, вдоль рамы установлены датчики температуры, предназначенные для компенсации изменения длины направляющей привода и ее изгиба в зависимости от колебаний температуры в помещении, а также благодаря способу повышения точности вертикальных установок для метрологической аттестации двух уровнемеров одновременно, заключающемся в том, что с помощью квадранта оптического обеспечивают вертикальное положение установки на бетонной подушке и горизонтальное положение неподвижной платформы и подвижной рабочей каретки в нижнем положении, при этом рама установки не соприкасается со стенами помещения, снижают температуру в помещении до минимального значения рабочего диапазона температур, с помощью лазерного интерферометра производят контроль значений уровня для одной стороны рабочей каретки, вводят поправки, устраняющие расхождения показаний лазерного интерферометра и установки и производят контрольный проход по всей высоте установки с их учетом, с помощью лазерного интерферометра снимают значения уровня по второй стороне подвижной рабочей каретки с учетом поправок по первой стороне, определяют несоответствия показаний по второй стороне по отношению к показаниям лазерного интерферометра и вводят поправки, устраняющие эти несоответствия, производят контрольный проход подвижной рабочей каретки по всей высоте установки, при котором определяют расхождение показаний лазерного интерферометра и установки, после чего температуру в помещении повышают до максимального значения рабочего диапазона температур и производят контрольный проход по всей высоте установки с применением лазерного интерферометра для каждой из сторон подвижной рабочей каретки, для каждой из которых определяют зоны диапазона перемещения подвижной рабочей каретки с одинаковыми температурными коэффициентами, вычисляют эти коэффициенты для каждой зоны и каждой стороны подвижной рабочей каретки и вводят в программу, производят контрольный проход с использованием лазерного интерферометра с учетом поправок при минимальной и максимальной температуре, после чего для точного определения начального положения отсчета, с помощью глубиномера измеряют смещение верхней плоскости подвижной рабочей каретки относительно нижней плоскости неподвижной платформы, являющейся точкой отсчета для уровнемеров, для левой и правой сторон подвижной рабочей каретки, и вводят данные смещения в программу, в процессе работы из-за возможных наклонов подвижной рабочей каретки непосредственное позиционирование каретки производят по одной стороне для одного уровнемера, а позиционирование подвижной рабочей каретки для второго уровнемера высчитывают с помощью управляющей программы с учетом поправок.
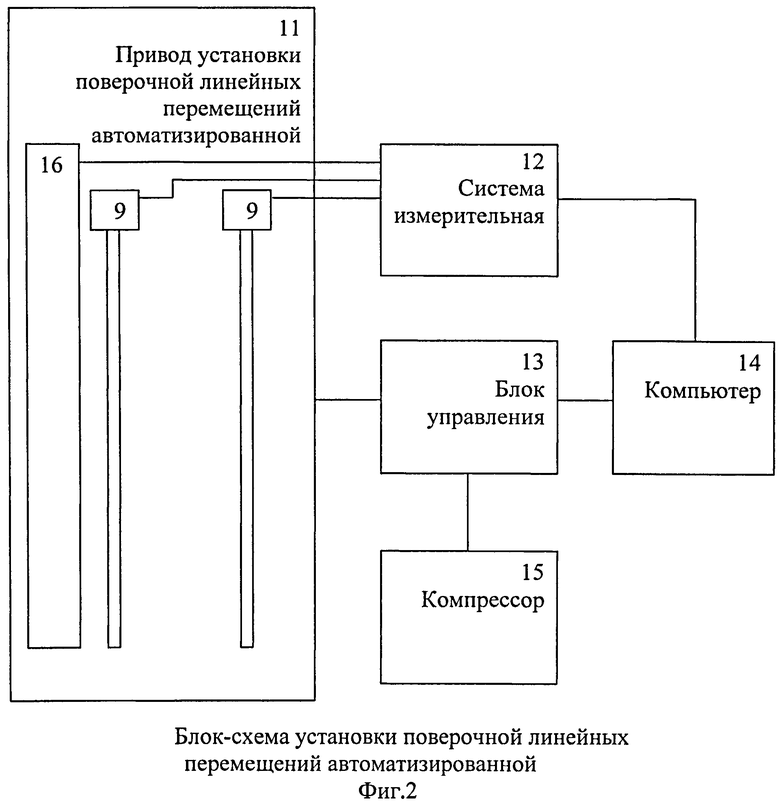
На фиг.1 представлен чертеж привода установки поверочной линейных перемещений автоматизированной.
Цифрами на чертеже обозначены:
1 - рама;
2 - направляющая привода;
3 - мерная лента;
4 - неподвижная платформа;
5 - приводная рабочая каретка;
6 - сдвоенное устройство фиксации поплавков;
7 - пневматическое устройство «параллельного захвата»;
8 - серводвигатель;
9 - аттестуемый уровнемер (не входит в состав установки);
10 - поплавок.
На фиг.2 представлена блок-схема установки поверочной линейных перемещений автоматизированной. Цифрами на блок-схеме обозначены:
9 - аттестуемый уровнемер (не входит в состав установки);
11 - привод установки поверочной линейных перемещений автоматизированной;
12 - система измерительная;
13 - блок управления;
14 - компьютер;
15 - компрессор;
16 - датчики температуры.
Конструктивно привод установки линейных перемещений автоматизированной 11 выполнен на раме 1, на которой установлены:
- направляющая привода 2, на боковую поверхность которой наклеена мерная лента 3, которая является частью датчика линейных перемещений, с рисками расстояние между которыми составляет 20 мкм; (из-за того, что мерная лента 3 расположена сбоку и не видна, она условно показана стрелкой на выноске позиции), вдоль направляющей привода установлены датчики температуры 16 (датчики температуры 16 расположены сзади направляющей привода 2 и на чертеже привода фиг.2 условно не показаны);
- неподвижная платформа 4, расположенная в нижней части направляющей привода 2 установки и являющаяся нулевой отметкой для аттестуемых уровнемеров 9, для плотной установки уровнемеров в посадочные места предусмотрены центрирующие втулки;
- приводная рабочая каретка 5, на которой с помощью сдвоенного устройство фиксации поплавков 6, состоящего из прижимной скобы и центрирующих втулок, крепятся поплавки 10 аттестуемых уровнемеров 9. На приводную рабочую каретку 5 также установлена головка считывателя датчика линейных перемещений, которая определяет перемещение поплавков 10, закрепленных с помощью сдвоенного устройства фиксации поплавков 6, с мерной ленты 3 по рискам, нанесенным на нее. На приводной рабочей каретке 5 также закреплены индукционные датчики, сигнализирующие о приближении к пневматическому устройству «параллельного захвата» 7;
- пневматическое устройство «параллельного захвата» 7, в котором два аттестуемых уровнемера 9 закрепляются и центрируются в вертикальной плоскости. Снизу на пневматическом устройстве «параллельного захвата» 7 установлен демпфер для мягкого касания с подвижной рабочей кареткой 5;
- серводвигатель 8.
Подключение привода установки поверочной линейных перемещений автоматизированной 11 производится к блоку управления 13 и компрессору 15;
Компрессор 15 предназначен для подачи сжатого воздуха в пневматическое устройство «параллельного захвата» 7.
Аттестуемые уровнемеры 9 и датчики температуры 16 подключаются к системе измерительной 12.
Вдоль рамы 1 установлены датчики температуры 16, предназначенные для компенсации ошибки, вызванной изменением длины направляющей привода и ее изгиба в зависимости от колебаний температуры в помещении. Система измерительная 12 представляет собой трехканальный вариант исполнения системы измерительной «СТРУНА», к двум каналам которой подключаются аттестуемые уровнемеры 9, а к третьему каналу - датчики температуры 16. Наличие третьего канала для датчиков температуры 16 объясняется тем, что измерение температуры осуществляется с точностью ±0,5°С, а измерительный канал системы измерительной «СТРУНА» аттестован на указанную точность измерений температуры.
Система измерительная 12 и блок управления 13 подключаются к компьютеру 14.
Рама 1 устанавливается на бетонной подушке строго вертикально с помощью регулируемых опор, контроль вертикального положения установки осуществляется с помощью квадранта оптического КО-30М по ГОСТ 8.393-80.
Линейный привод приводной рабочей каретки 5 имеет направляющую привода 2 на основе алюминиевого профиля и зубчатую ременную передачу, с помощью которой производится перемещение приводной рабочей каретки 5 с помощью серводвигателя 8, имеющего энкодер с 56000 отсчетов на один оборот шестерни.
Механизм пневматического устройства «параллельного захвата» 7 состоит из силового кронштейна со смонтированными на нем радиальными захватами и стопорными пневмоцилиндрами для фиксации пневматического устройства «параллельного захвата» 7 от смещения вверх/вниз. Радиальные захваты снабжены губками для фиксации поверяемого уровнемера 9 от смещения. Для установки уровнемеров на ось радиальных захватов предназначены направляющие, на кронштейнах которых расположены индуктивные датчики наличия уровнемера. Стопорные пневмоцилиндры снабжены упорами с резиновыми наконечниками для исключения повреждения направляющей привода 2.
Контроль положения приводной рабочей каретки 5 осуществляется с помощью датчика линейных перемещений, в состав которого входят мерная лента 3, наклеенная на направляющую привода 2 и головка считывания, закрепленная на приводной рабочей каретке 5.
Управление приводом установки поверочной линейных перемещений автоматизированной 11 осуществляется с помощью блока управления 13 от компьютера 14. Блок управления приводом 13 с собственным контроллером обеспечивает работу серводвигателя 8 по командам от компьютера. При этом программное обеспечение, установленное на компьютере, реализует перемещение приводной каретки 5 в заданное положение с заданной скоростью.
Следует отметить, что чисто механическое увеличение числа градуируемых (поверяемых) уровнемеров до двух не приведет к обеспечению заданной точности. Это связано с тем, что в процессе движения приводной рабочей каретки 5 вдоль направляющей привода 2 происходит перекос приводной рабочей каретки 5 относительно направляющей привода 2, причем в разных точках он имеет разную величину. Для компенсации ошибок, связанных с перекосом, позиционирование приводной рабочей каретки 5 производится по одной стороне для одного уровнемера, а позиционирование приводной рабочей каретки 5 по противоположной стороне для второго уровнемера высчитывается с помощью управляющей программы с учетом поправок, полученных в процессе настройки привода установки поверочной линейных перемещений автоматизированной 11 с помощью лазерного интерферометра.
Для обеспечения стабильности в части вертикального положения привода установки поверочной линейных перемещений автоматизированной 11 он установлен на бетонной подушке.
Работает установка следующим образом.
Включаются компьютер 14, компрессор 15 система измерительная 12.
Включается блок управления 13, предназначенный для управления приводом установки поверочной линейных перемещений автоматизированной 11 как в ручном режиме, так и от компьютера 14.
После включения блока управления 13 выполняется поиск нулевой координаты приводной рабочей каретки 5. На малой скорости приводная рабочая каретка 5 перемещается в нижнее положение до соприкосновения с неподвижной платформой 4. После соприкосновения серводвигатель 8 отводит приводную рабочую каретку 5 на расстояние 1 мм (положение «нулевой» координаты).
Перед проведением метрологической аттестации уровнемеров 9 пневматическое устройство «параллельного захвата» 7 устанавливается на высоте, соответствующей длине уровнемеров подлежащих метрологической аттестации. Для этого приводная рабочая каретка 5 подходит к пневматическому устройству «параллельного захвата» 7, что контролируется индуктивным датчиком, при этом устройство «параллельного захвата» 7, упирается в демпфер, установленный на пневматическом устройстве «параллельного захвата» 7. Стопорные пневмоцилиндры, расположенные на пневматическом устройстве «параллельного захвата» 7, по команде компьютера 14 освобождают его от фиксации относительно направляющей привода 2. Далее, приводная рабочая каретка 5 перемещается вместе с устройством «параллельного захвата» 7 на высоту, соответствующую размеру аттестуемого уровнемера 9. Стопорные пневмоцилиндры фиксируют по команде компьютера 14 пневматическое устройство «параллельного захвата» 7 относительно направляющей привода 2 для предохранения от смещения вверх/вниз. Система управления запоминает положение пневматического устройства «параллельного захвата» 7. Для страховки в случае снижения давления в компрессоре предусмотрена механическая блокировка положения пневматического устройства «параллельного захвата» 7 с помощью пружинных фиксаторов. Приводная каретка 2 опускается в нулевую координату (в «исходное» положение).
Аттестуемые уровнемеры 9 одинаковой длины устанавливаются на неподвижной платформе 4 с помощью центрирующих втулок. При этом подвижная рабочая каретка 5 находится в нижнем положении.
Зажим и центровка уровнемеров 5 осуществляется с помощью пневматического устройства «параллельного захвата» 7.
Направляющие «параллельного захвата» обеспечивают строго вертикальное положение аттестуемых уровнемеров 9.
Поплавки 10 устанавливаются на подвижной рабочей каретке 5 с помощью сдвоенного устройство фиксации поплавков 6, состоящего из скобы и центрирующих втулок, обеспечивающих правильное рабочее положение поплавков относительно оболочки аттестуемого уровнемера 9, и крепятся посредством откидных болтов с барашками.
Если необходимо произвести метрологическую аттестацию только одного уровнемера, то место второго уровнемера остается свободным, но в сдвоенное устройство фиксации поплавков 6, устанавливается второй поплавок, с теми же размерами, что и поплавок аттестуемого уровнемера.
Приводная рабочая каретка 5 перемещает поплавки 10 из одного положения в другое в диапазоне измерений перемещения поплавков по программе, заложенной в компьютер 14 (минимальный шаг перемещения может составлять 1 мм, а максимальная величина перемещения 4000 мм).
Значение задаваемого перемещения для уровнемеров различных типов определяется как расстояние от нижней кромки неподвижной платформы 4 (основание уровнемера) до верхней кромки приводной рабочей каретки 5, что соответствует положению поплавков 10.
С целью точного определения положения поплавков 10 при перемещении вдоль направляющей привода 2 используется датчик линейных перемещений, в состав которого входят мерная лента 3, наклеенная на боковую поверхность направляющей привода 2 и считыватель, закрепленный на подвижной рабочей каретке 5, который определяет перемещение поплавков 10 по рискам на мерной ленте 3, расстояние между которыми составляет 20 мкм. Определенная датчиком линейных перемещений величина перемещения поплавков 10 является управляющим сигналом для контроллера привода, расположенном в блоке управления 13.
Компенсация погрешности задаваемого перемещения, возникающей при изменении размеров и изгиба направляющей привода 2 вследствие изменения температуры окружающей среды, осуществляется программно по показаниям датчиков температуры 16, равномерно расположенных вдоль направляющей привода 2.
Перед введением в эксплуатацию производят настройку установки поверочной линейных перемещений автоматизированной по методике повышения точности позиционирования вертикальных установок для метрологической аттестации двух уровнемеров одновременно. Эта методика заключается в том, что с помощью квадранта оптического обеспечивают вертикальное положение установки на бетонной подушке и горизонтальное положение неподвижной платформы и подвижной рабочей каретки в нижнем положении, при этом рама установки не соприкасается со стенами помещения. Снижают температуру в помещении до минимального значения рабочего диапазона температур. С помощью лазерного интерферометра производят контроль значений уровня для одной стороны рабочей каретки, вводят поправки, устраняющие расхождения показаний лазерного интерферометра и установки и производят контрольный проход по всей высоте установки с их учетом. С помощью лазерного интерферометра снимают значения уровня по второй стороне подвижной рабочей каретки с учетом поправок по первой стороне, определяют несоответствия показаний по второй стороне по отношению к показаниям лазерного интерферометра и вводят поправки, устраняющие эти несоответствия. Производят контрольный проход подвижной рабочей каретки по всей высоте установки, при котором определяют расхождение показаний лазерного интерферометра и установки, после чего температуру в помещении повышают до максимального значения рабочего диапазона температур и производят контрольный проход по всей высоте установки с применением лазерного интерферометра для каждой из сторон подвижной рабочей каретки, для каждой из которых определяют зоны диапазона перемещения подвижной рабочей каретки с одинаковыми температурными коэффициентами, вычисляют эти коэффициенты для каждой зоны и каждой стороны подвижной рабочей каретки и вводят в программу. Производят контрольный проход с использованием лазерного интерферометра с учетом поправок при минимальной и максимальной температуре.
В процессе настройки лазерный интерферометр ставится перед установкой. Сверху приводной рабочей каретки 5 ставится отражатель, а под неподвижной платформой 4 - угловой отражатель. В положении «нулевой» координаты показания лазерного интерферометра обнуляются. Таким образом, при передвижении приводной рабочей каретки 5 лазерный интерферометр измеряет с высокой точностью относительное положение между неподвижной платформой 4 и приводной рабочей кареткой 5. Ввиду этого, для вычисления истинного положения уровнемеров 9, то есть точного определения начального положения отсчета, с помощью глубиномера измеряют смещение верхней плоскости подвижной рабочей каретки 5 относительно нижней плоскости неподвижной платформы 4, являющейся точкой отсчета для уровнемеров, для левой и правой сторон подвижной рабочей каретки 5, и вводят данные смещения в программу.
В процессе работы из-за возможных наклонов подвижной рабочей каретки непосредственное позиционирование каретки производят по одной стороне для одного уровнемера, а позиционирование подвижной рабочей каретки для второго уровнемера высчитывают с помощью управляющей программы с учетом поправок.
Процесс метрологической аттестации уровнемеров происходит автоматически по заданной программе, установленной на компьютере.
При этом в случае проведения градуировки создается шкала или градуировочная таблица, отражающая зависимость выходного сигнала от уровня, и заносится в память уровнемера.
В случае проведения калибровки происходит сравнение действительных значений метрологических характеристик уровнемера с эталонной величиной - отсчете на установке поверочной линейных перемещений автоматизированной. В случае необходимости происходит введение поправок в память уровнемера.
В случае проведения поверки проводится проверка соответствия параметров уровнемеров установленным техническим требованиям.
Метрологическая аттестация двух датчиков производится одновременно.
По результатам метрологической аттестации выпускается соответствующий отчет.
На предприятии изготовлена описанная установка, проведены ее испытания, которые подтвердили возможность метрологической аттестации двух уровнемеров одновременно с погрешностью менее ±0,1 мм (среднеквадратическая погрешность составила ±30 мкм).
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2320961C1 |
| Метрологический стенд по поверке, калибровке уровнемеров и сигнализаторов уровня | 2018 |
|
RU2690701C2 |
| Установка для поверки и калибровки уровнемеров | 2021 |
|
RU2772553C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| УНИВЕРСАЛЬНЫЙ МЕТРОЛОГИЧЕСКИЙ ГЕОДЕЗИЧЕСКИЙ СТЕНД | 2006 |
|
RU2362978C2 |
| СПОСОБ ПЕРЕДАЧИ РАЗМЕРА ЕДИНИЦЫ СРЕДНЕЙ МОЩНОСТИ ИЛИ ЭНЕРГИИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2017085C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| Стенд по поверке буйковых уровнемеров и сигнализаторов уровня | 2020 |
|
RU2739141C1 |
| Устройство для поверки акустических уровнемеров | 1980 |
|
SU964471A1 |
| СТЕНД ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ "ЦИФРОВОЙ НИВЕЛИР+КОДОВАЯ РЕЙКА" | 2015 |
|
RU2584725C1 |
Группа изобретений относится к области измерительной техники и может быть использована для метрологической аттестации уровнемеров. Технический результат: возможность проведения метрологической аттестации двух датчиков уровня одновременно с погрешностью не более ±0,1 мм по всей длине уровнемера в непрерывном режиме с минимальным шагом 1 мм и длине уровнемера до 4000 мм. Указанный результат достигается благодаря тому, что в конструкцию автоматизированной поверочной установки линейных перемещений для метрологической аттестации уровнемеров введены сдвоенное устройство фиксации поплавков на подвижной рабочей каретке, пневматическое устройство «параллельного захвата» с возможностью закрепления и центрирования двух уровнемеров в вертикальной плоскости. В качестве устройства измерения перемещения приводной рабочей каретки используется датчик линейных перемещений, установленный на направляющей привода. Выходной сигнал с датчика линейных перемещений является управляющим сигналом для перемещения приводной рабочей каретки с закрепленными на ней поплавками с заданным шагом вдоль установленных уровнемеров, причем из-за возможных наклонов подвижной рабочей каретки, позиционирование последней при перемещении вдоль направляющей привода реализовано по одной стороне для одного уровнемера, а позиционирование каретки для второго уровнемера высчитывается с помощью управляющей программы с учетом поправок, вдоль рамы установлены датчики температуры, предназначенные для компенсации изменения длины направляющей привода и ее изгиба в зависимости от колебаний температуры в помещении, а также благодаря способу повышения точности вертикальных установок для метрологической аттестации двух уровнемеров одновременно. 2 н.п. ф-лы, 2 ил.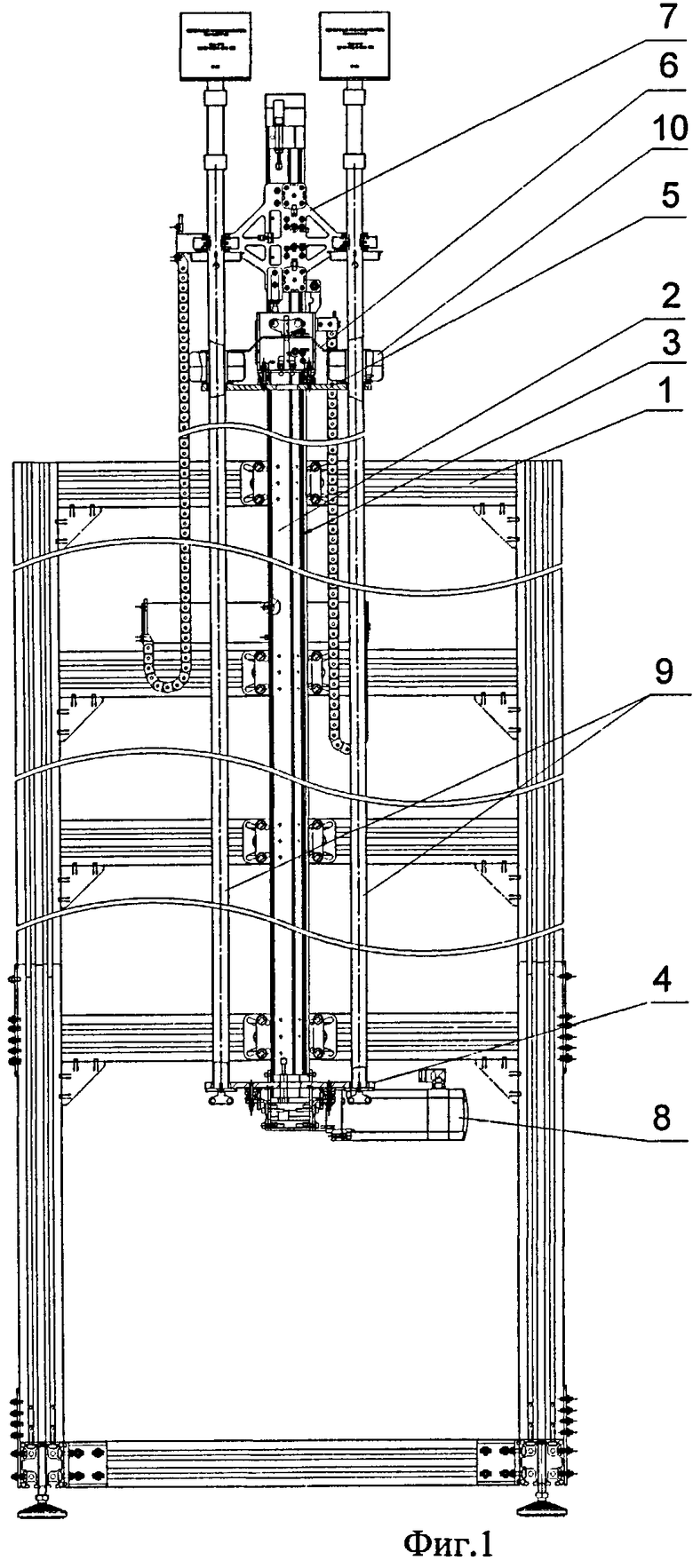
1. Установка поверочная линейных перемещений автоматизированная, предназначенная для метрологической аттестации уровнемеров, состоящая из вертикально расположенной рамы из алюминиевого профиля, не прикрепляемой к стенам, с точной вертикальной установкой, в нижней части рамы на направляющей привода установлена неподвижная платформа, являющаяся нулевой отметкой для уровнемеров, на направляющей привода располагается приводная рабочая каретка с возможностью перемещения с помощью линейного привода, управление которым возможно с помощью блока управления, обеспечивающего работу серводвигателя по командам от компьютера, при этом программное обеспечение, установленное на компьютере, выполнено с возможностью реализации перемещения приводной рабочей каретки в заданное в программе положение с заданной скоростью, отличающаяся тем, что введены сдвоенное устройство фиксации поплавков на приводной рабочей каретке, пневматическое устройство «параллельного захвата» с возможностью закрепления и центрирования двух уровнемеров в вертикальной плоскости, в качестве устройства измерения перемещения приводной рабочей каретки используется датчик линейных перемещений, мерная лента которого приклеена на направляющей привода, в основу работы датчика линейных перемещений положен принцип фотоэлектрического считывания штрихов, равномерно нанесенных на мерную ленту, с помощью считывающей головки, расположенной на подвижной рабочей каретке, выходной сигнал с датчика линейных перемещений является управляющим сигналом для перемещения приводной рабочей каретки с закрепленными на ней поплавками с заданным шагом вдоль установленных уровнемеров, причем, из-за возможных наклонов приводной рабочей каретки, позиционирование последней при перемещении вдоль направляющей привода реализовано по одной стороне для одного уровнемера, а позиционирование каретки для второго уровнемера высчитывается с помощью управляющей программы с учетом поправок, вдоль рамы установлены датчики температуры, предназначенные для компенсации изменения длины и изгиба направляющей привода в зависимости от колебаний температуры в помещении.
2. Способ повышения точности позиционирования вертикальных установок для метрологической аттестации двух уровнемеров одновременно, заключающийся в том, что с помощью квадранта оптического обеспечивают вертикальное положение установки на бетонной подушке и горизонтальное положение неподвижной платформы и приводной рабочей каретки в нижнем положении, при этом рама установки не соприкасается со стенами помещения, снижают температуру в помещении до минимального значения рабочего диапазона температур, с помощью лазерного интерферометра производят контроль значений уровня для одной стороны приводной рабочей каретки, вводят поправки, устраняющие расхождения показаний лазерного интерферометра и установки и производят контрольный проход по всей высоте установки с их учетом, с помощью лазерного интерферометра снимают значения уровня по второй стороне приводной рабочей каретки с учетом поправок по первой стороне, определяют несоответствия показаний по второй стороне по отношению к показаниям лазерного интерферометра и вводят поправки, устраняющие эти несоответствия, производят контрольный проход приводной рабочей каретки по всей высоте установки, при котором определяют расхождение показаний лазерного интерферометра и установки, после чего температуру в помещении повышают до максимального значения рабочего диапазона температур и производят контрольный проход по всей высоте установки с применением лазерного интерферометра для каждой из сторон подвижной рабочей каретки, для каждой из которых определяют зоны диапазона перемещения приводной рабочей каретки с одинаковыми температурными коэффициентами, вычисляют эти коэффициенты для каждой зоны и каждой стороны подвижной рабочей каретки и вводят в программу, производят контрольный проход с использованием лазерного интерферометра с учетом поправок при минимальной и максимальной температуре, после чего для точного определения начального положения отсчета, с помощью глубиномера измеряют смещение верхней плоскости приводной рабочей каретки относительно нижней плоскости неподвижной платформы, являющейся точкой отсчета для уровнемеров, для левой и правой сторон приводной рабочей каретки, и вводят данные смещения в программу, в процессе работы из-за возможных наклонов подвижной рабочей каретки непосредственное позиционирование каретки производят по одной стороне для одного уровнемера, а позиционирование подвижной рабочей каретки для второго уровнемера высчитывают с помощью управляющей программы с учетом поправок.
| Устройство для уравновешивания одноцилиндровых двигателей и насосов | 1924 |
|
SU1500A1 |
| Устройство для уравновешивания одноцилиндровых двигателей и насосов | 1924 |
|
SU1500A1 |
| JP 62056822 A, 12.03.1987 | |||
| Устройство для поверки уровнемеров для жидкости | 1982 |
|
SU1024741A2 |

