Ссылка на родственные заявки
В настоящей заявке испрашивается приоритет на основании заявки на патент Италии №10209000011535, поданной 11.07.2019.
Область техники, к которой относится изобретение
Настоящее изобретение относится к области диспенсеров стаканов, преимущественно, но не исключительно, применяемых в автоматах по продаже напитков, к которым относится настоящее описание без потери его общего характера.
Предшествующий уровень техники
В области торговых автоматов известны диспенсеры стаканов, расположенные внутри торговых автоматов и по существу содержащие удерживающие стаканы турели, состоящие из множества колонн, в которых расположены соответствующие стопки стаканов, и установленные с возможностью вращения вокруг центральной оси для подвода колонн по одной к станции выдачи стаканов, где стакан отделяется со дна стопки и становится доступным для заполнения напитком.
Существует множество типов диспенсеров стаканов, которые можно концептуально разделить на три основные категории.
К первой категории относятся диспенсеры стаканов, в которые колонны просто выполняют функцию контейнеров для стопок стаканов и выполнены с возможностью зацепления, когда подведены индивидуально к станции отделения стаканов, с общим устройством отделения стаканов, предназначенным для отсоединения одного стакана от стопки стаканов.
Устройства, описанные, например, в US 3 283 951 A; US 3807 600 A и WO 2013/033026 A1, относятся к этой категории.
Такие диспенсеры имеют простую конструкцию, но имеют ограничение, поскольку не могут раздавать стаканы разных размеров. Фактически, каждый раз, когда колонна подводится к станции отделения, стопка стаканов необратимо зацепляется с устройство отделения стаканов и, поэтому, смена колонны в станции отделения возможна только после того, как будет израсходована стопка стаканов, находящаяся в зацеплении с устройством отделения.
Ко второй категории относятся диспенсеры стаканов, в которых колонны, в дополнение к функции контейнера для стопки стаканов, оборудованы соединенными с ними устройствами отделения стаканов, выборочно приводимыми в действие общим приводным устройством, расположенным на станции отделения стаканов.
К этой категории относятся диспенсеры, например, описанные в EP 0 339 946 A2, GB 2 402 386 A2 и GB 1 604 306 A.
Тот факт, что каждая колонна оборудована соответствующим устройством отделения, позволяет каждой колонне содержать стопку стаканов размером, отличающимся от размеров стопок, находящихся в других колоннах, и такие колонны выборочно подводятся к станции отделения стаканов в зависимости от размера стакана, заполняемого выбранным пользователем напитком.
Однако такое преимущество в смысле разнообразия раздаваемых стаканов по существу приводит к усложнению конструкции, в частности в отношении вышеупомянутого общего приводного устройства, которое должно быть выполнено так, чтобы не сталкиваться с колоннами и соответствующими устройствами отделения стаканов во время вращения держателя стаканов и, в то же время должно иметь возможность точно и стабильно, и в то же время быстро разъемно зацепляться с устройством отделения стаканов, установленным на станции отделения стаканов, так, чтобы сработать, если будет запрошена выдача стакана или иметь возможность отойти вследствие вращения турели держателя стаканов, если запрашивается изменение размера стакана или если колонна опустела.
Для устранения этого недостатка, в заявке WO 2017/158555 A1 настоящего заявителя был предложен диспенсер стаканов, содержащий первый привод для привода держателя стаканов во вращение вокруг его собственной оси и выборочного подвода колонн к фиксированной станции выдачи стаканов, второй привод для приведения в действия устройства отделения стаканов колонны, подведенной к станции выдачи стаканов, и устройство отбора мощности, приводимое в действие вторым приводом и выборочно перемещаемое третьим приводом между нерабочим положением, в котором устройство отбора мощности не мешает устройством отделения стаканов, которые движутся через станцию выдачи стаканов вследствие вращения турели держателя стаканов, и положением кинематического соединения, в которой устройство отбора мощности соединено с устройством приема мощности устройства отделения стаканов, расположенным на станции выдачи стаканов, и удерживается только на время, необходимое для выдачи стакана.
Цель и краткое описание изобретения
Целью настоящего изобретения является создание электронной системы управления для диспенсера стаканов, относящегося к типу, описанному в WO 2017/158555 A1 и способного эффективно, точно и надежно управлять вращением турели держателя стаканов.
Согласно настоящему изобретению, предлагается диспенсер стаканов, описанный в проложенной формуле изобретения.
Краткое описание чертежей
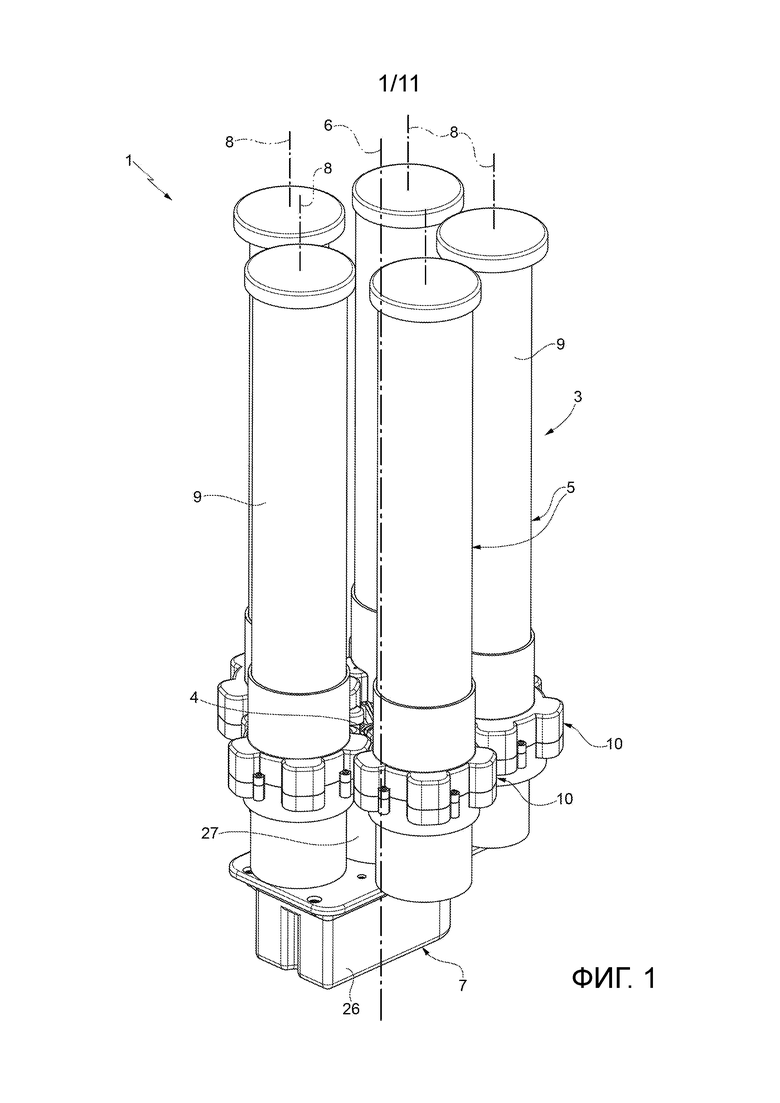
Фиг.1 - вид в перспективе диспенсера стаканов по предпочтительному варианту настоящего изобретения.
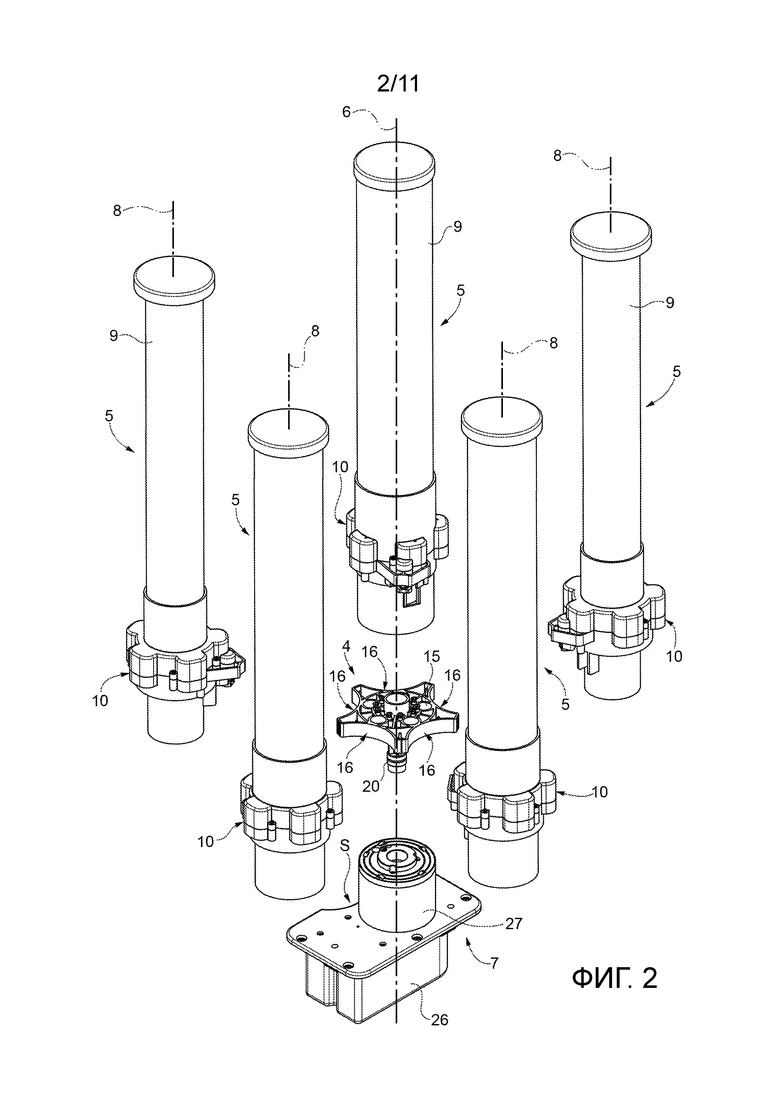
Фиг.2 - разнесенный вид диспенсера стаканов по фиг.1.
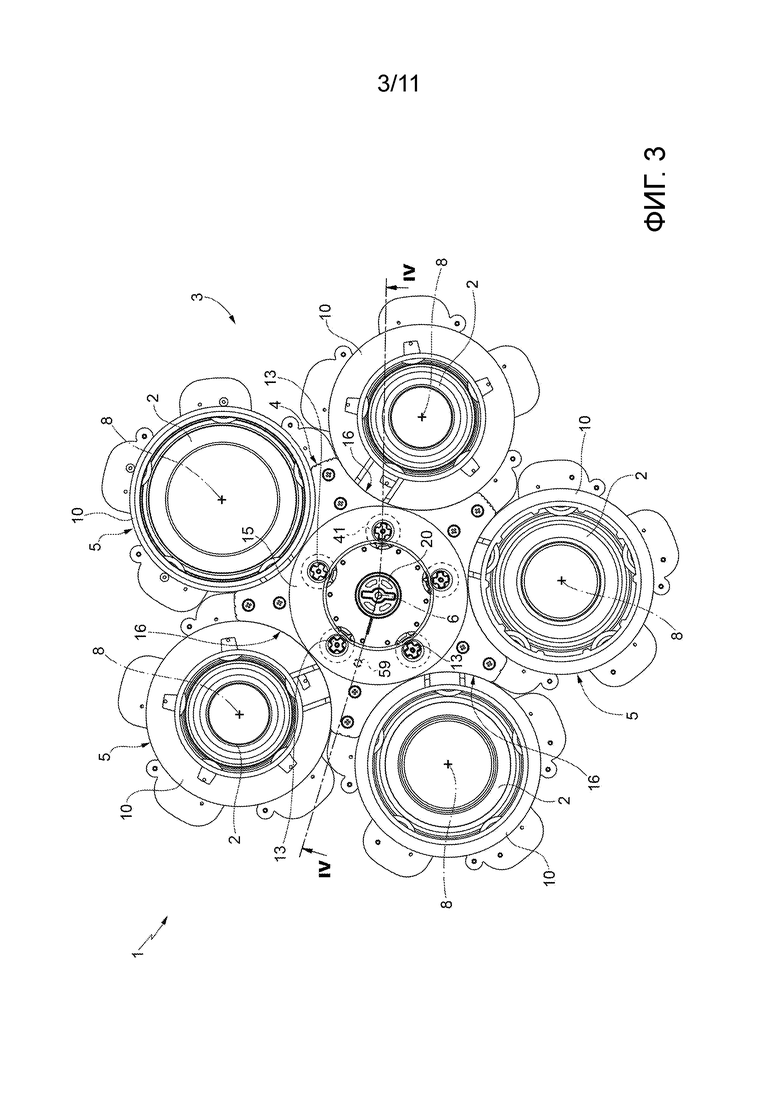
Фиг.3 - вид снизу диспенсера стаканов по фиг.1.
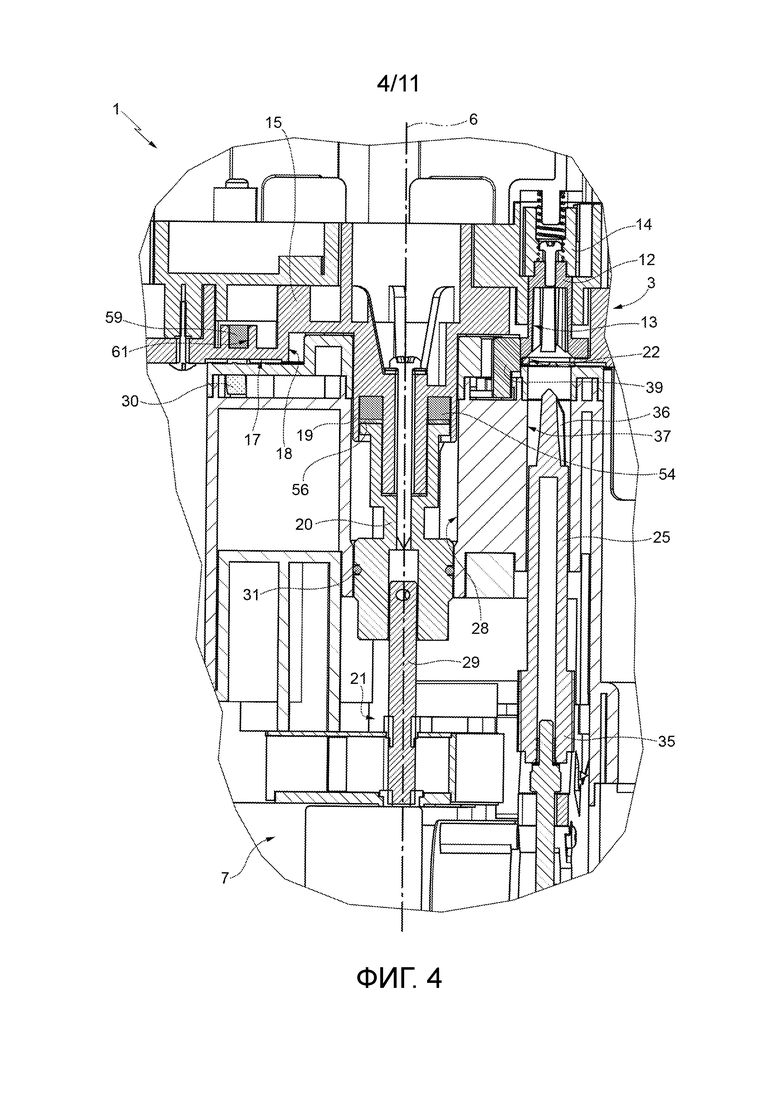
Фиг.4 сечение по линии IV-IV на фиг.3, где некоторые детали удалены для ясности.
Фиг.5 - вид в перспективе в увеличенном масштабе фрагмента фиг.1, где некоторые детали удалены для ясности и разнесены.
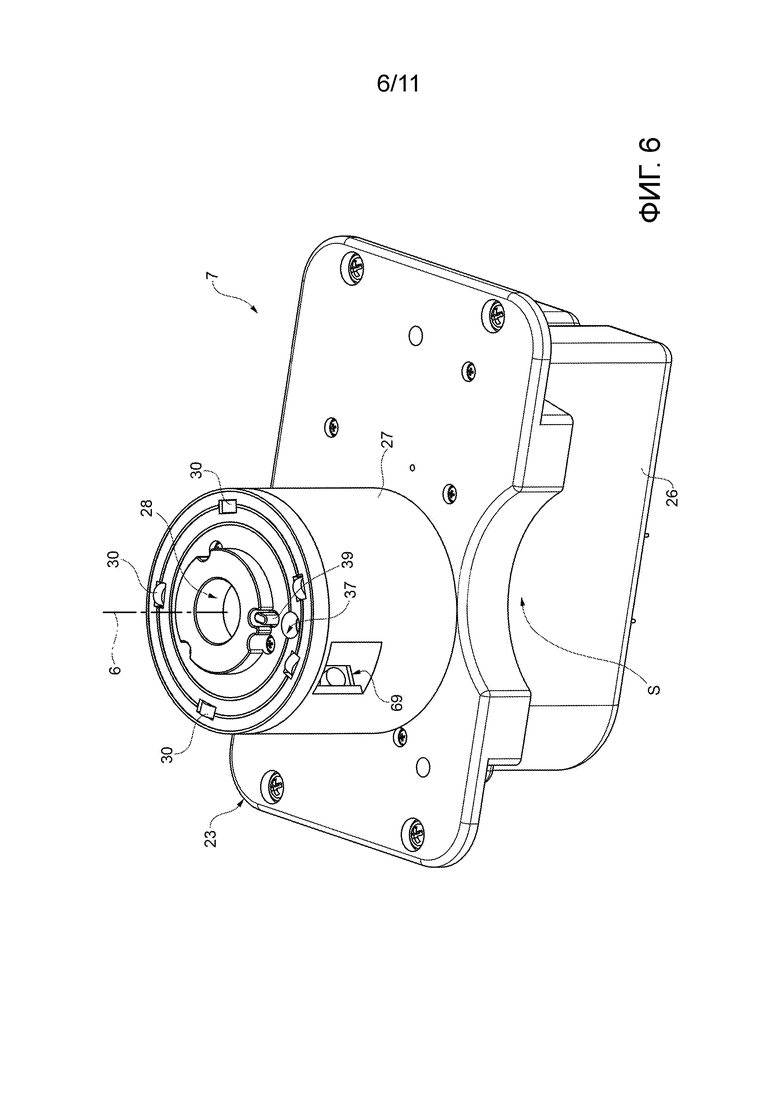
Фиг.6 - вид в перспективе приводного узла диспенсера стаканов по фиг.1.
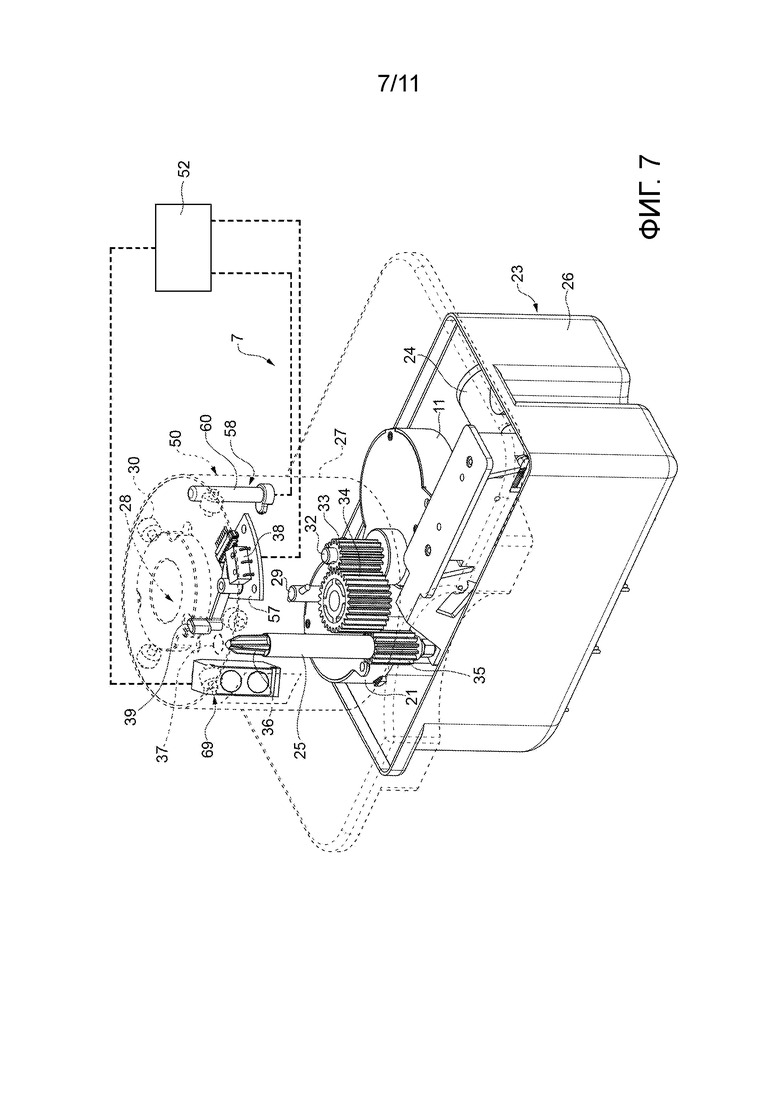
Фиг.7 - приводной узел по фиг.6 с некоторыми деталями, удаленными для ясности.
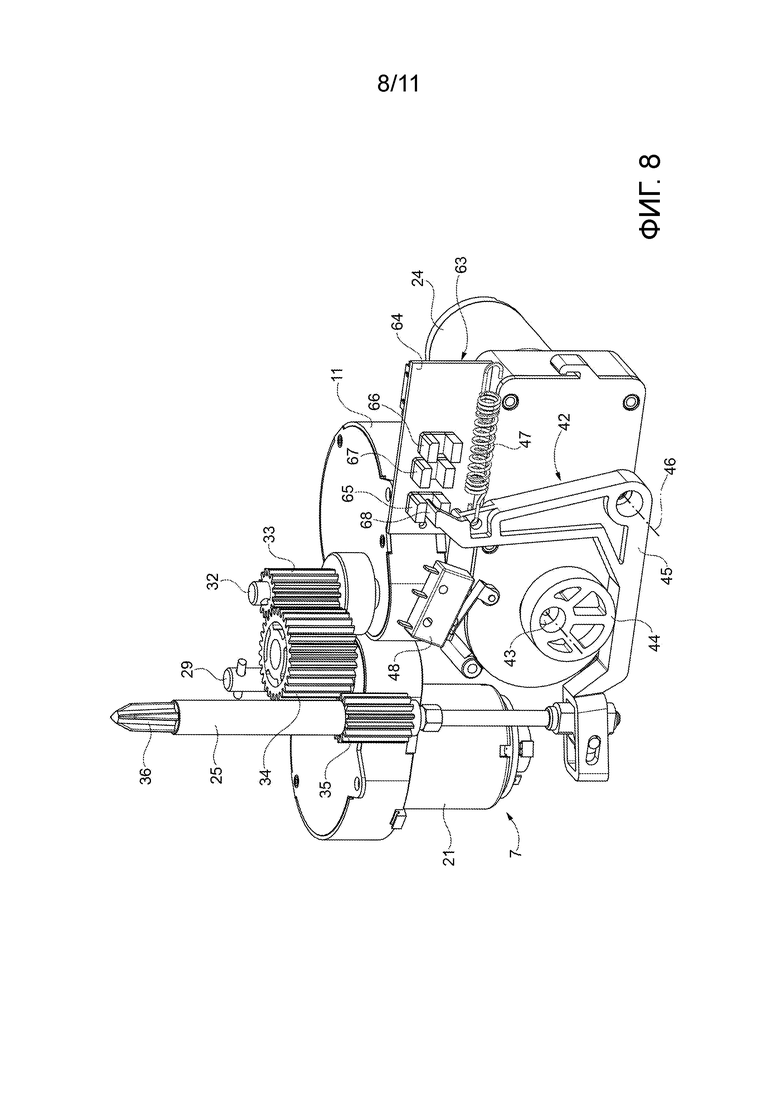
Фиг.8 - фрагмент приводного узла по фиг.7 с некоторыми деталями, удаленными для ясности.
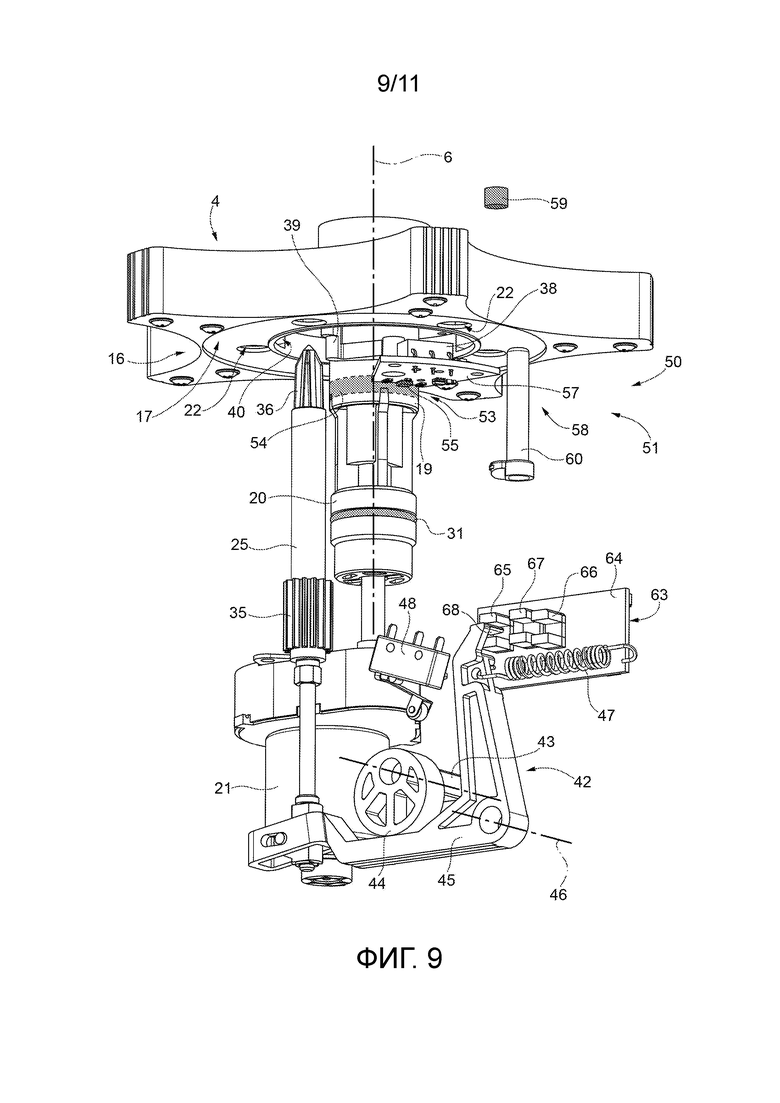
Фиг.9 - вид в перспективе части диспенсера стаканов по фиг.1.
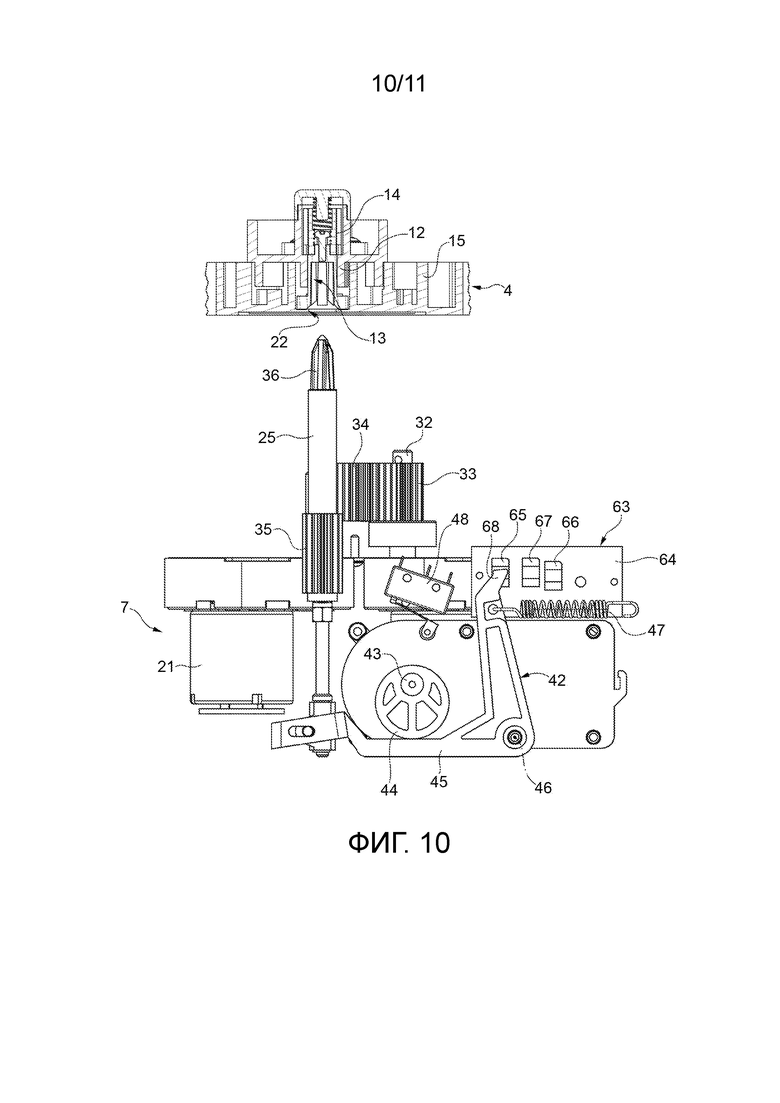
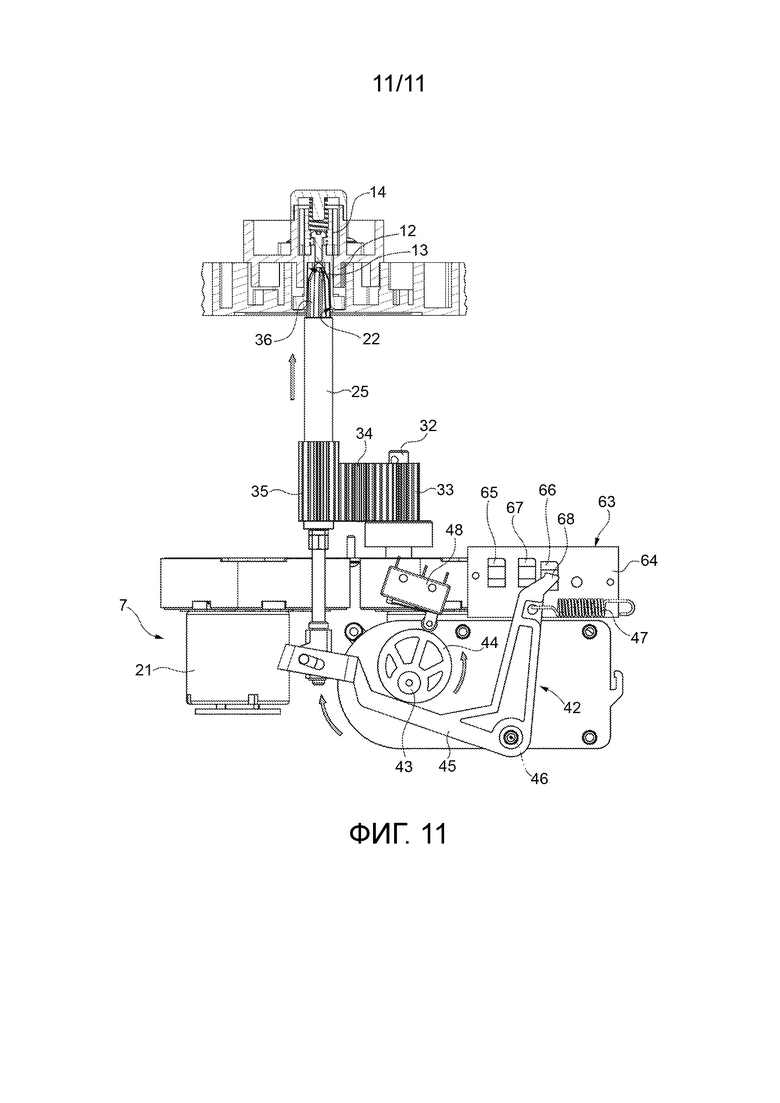
Фиг.10 и 11 - фрагмент приводного узла по фиг.8 в двух разных рабочих конфигурациях.
Подробное описание предпочтительных вариантов изобретения
Далее следует подробное описание настоящего изобретения со ссылками на приложенные чертежи, позволяющее специалистам воспроизвести и использовать его. Специалистам должны быть понятны различные изменения, которые могут быть внесены в описанные варианты, а описанные общие принципы могут применяться и к другим вариантам без выхода на пределы объема защиты настоящего изобретения, определенного в приложенной формуле изобретения. Таким образом, настоящее изобретение не следует рассматривать, как ограниченное описанными и проиллюстрированными вариантами, но ему должен быть дан наибольший объем защиты в соответствии и описанными и заявленными признаками.
Если не оговорено иное, все технические и научные термины, используемые в настоящем описании, имеют то же значение, которое в них вкладывают специалисты в области, к которой относится настоящее изобретение. В случае конфликта, настоящее описание, включая приведенные определения, является обязывающим. Кроме того, примеры приведены только в целях иллюстрации и как таковые не должны считаться ограничивающими.
Для облегчения понимания описываемых здесь вариантов, приводятся ссылки на некоторые конкретные варианты и для их описания используется специфический язык. Терминология, используемая в настоящем описании, предназначена только для описания конкретных вариантов и не ограничивает объем настоящего изобретения.
На фиг.1 и 2 позицией 1 обозначен диспенсер стаканов в автомате для продажи напитков (не показан), относящемся к типу, описанному в WO 2017/168555 A1, где приводится подробное его описание.
Диспенсер 1 стаканов, у которого ниже описывается только та часть, которая необходима для понимания настоящего изобретения, обычно срабатывает в начале цикла приготовления напитка для подачи пустого стакана 2 на станцию заполнения стакана (не показана), где стакан 2 заполняется напитком или его ингредиентами.
Диспенсер 1 стаканов содержит турель 3 держателя стаканов, включая опору 4 колонн и множество колонн 5, съемно установленных на опоре 4 и каждая из которых выполнена с возможностью содержать стопку стаканов 2 размер которых такой же или отличающийся от размера стаканов 2 в других стопках.
Турель 3 установлена с возможностью вращения вокруг вертикальной оси 6 и при использовании проводится в действие приводным узлом 7 с электронным управлением, который разъемно соединен с турелью 3, расположен под ней и который более подробно будет описан ниже, для вращения колонн 5 вокруг оси 6 так, чтобы подводить каждый раз одну колону 5 к станции S отделения стаканов, из которой стаканы 2 подаются на вышеупомянутую станцию заполнения стаканов падением, обычно по желобу или автоматическим манипулятором.
Каждая колонна 5 имеет продольную ось 8, параллельную оси 6, и содержит трубчатый кожух 9, расположенный соосно с осью 8, выполнена с возможностью содержать стопку стаканов 2 и сверху закрыта крышкой.
Каждая колонна 5 оборудована устройством 10 отделения стаканов, расположенным на нижнем конце трубчатого кожуха 9 и выполненным с возможностью поддерживать стопку стаканов 2 в трубчатом кожухе 9 и, при работе, отделять один стакан 2 от нижнего конца стопки стаканов 2.
Предпочтительно, устройство 10 отделения стаканов относится к известному типу и каждое из них содержит множество вращающихся элементов спирального профиля расположенных вокруг оси 8 соответствующей колонны 5 так, чтобы сформировать между ними выходной канал для стаканов 2, которые отсоединяются по одному от нижнего конца стопки стаканов 2.
Устройства 10 отделения стаканов приводятся в действие электрическим приводом 11, который является частью приводного узла 7 и имеет приводной выход, предназначенный для соединения с приводным входом или устройством отбора мощности устройства 10 отделения стаканов, расположенного на станции S отделения стаканов.
В показанном примере приводной вход или устройство отбора мощности каждого устройства 10 отделения стаканов содержит вал 12, установленный с возможностью вращения вокруг оси, параллельной осям 6 и 8 и на одном конце имеет шлицевое коническое отверстие 13, предназначенное для осевого зацепления с вышеупомянутым приводным выходом привода 11 устройства 10 отделения стаканов для передачи вращения приводного выхода привода 12 на шестерню 14, закрепленную шпонкой на валу 12 и определяющую входную шестерню зубчатой передачи (которая известна и не показана) устройства 10 отделения стаканов. Такая зубчатая передача предназначена для одновременного привода всех вращающихся элементов со спиральным профилем устройства 10 отделения стаканов.
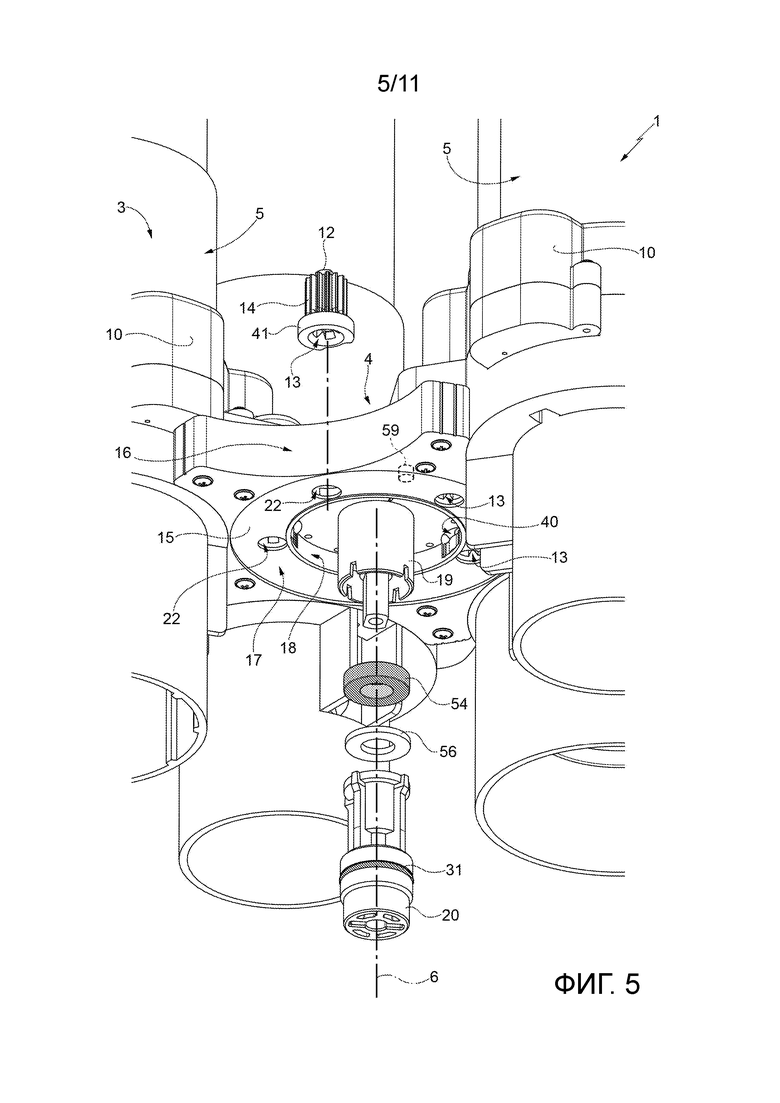
Как показано на фиг.3, 4 и 5 опора 4 колонн содержит пластину, которая лежит в плоскости, перпендикулярной оси 6, рядом с нижними концами колонн 5, и содержит центральную ступицу 15, расположенную соосно с осью 6, и множество радиальных выступов, которые вдоль периферии центральной ступицы 15 определяют гнезда 16, каждое и которых находится в зацеплении с устройством 10 отделения стакана соответствующей колонны 5.
Центральная ступица 15 снизу ограничена плоской поверхностью 17, проходящей перпендикулярно оси 6 и в центре имеет круглый утопленный участок 18, соосный с осью 6.
Центральная ступица 15 имеет соединительный участок или устройство отбора мощности, предназначенное для кинематического соединения опоры 4 колонн с электрическим приводом 21, который является частью вышеупомянутого приводного узла 7 и который будет более подробно описан ниже, и, тем самым, для вращения опоры 4 колонн и, соответственно, турели 3 вокруг оси 6.
В частности, соединительный участок содержит центральную гильзу 19, которая выступает вниз из утопленного участка 18 соосно с осью 6, и хвостовик 20, который находится в зацеплении со свободным концом гильзы 19, зафиксированный в угловом и осевом направлениях, и предназначен для соединения при использовании с вращающимся выходом привода 21.
Предпочтительно, турель 3 держателя стаканов имеет осесимметричную форму относительно оси 6 и, поэтому, гнезда 15 и устройства 10 отделения стакана равномерно распределены вокруг оси 6.
В частности, как показано на фиг.3, устройства 10 отделения стакана соединены с соответствующими гнездами 16 так, чтобы соответствующие шлицевые конические отверстия 13 были равномерно распределены по окружности, соосной с осью 6 и зацеплялись с соответствующими гнездами, сформированными в центральной ступице 15 на противоположной стороне гильзы 19 так чтобы открыть к ним доступ через соответствующие сквозные отверстия 22, сформированные в поверхности 17 центральной ступицы 15 в кольцевой области, окружающей утопленный участок 18.
Как показано на фиг.2, 6, 7 и 9, приводной узел 7 является компактным узлом, расположенным под опорой 4 колонн, и содержит:
- кожух 23 и, расположенное внутри кожуха,
- привод 21 для вращения турели 3 держателя стаканов вокруг оси 6 и выборочного подвода колонн 5 к станции S отделения стаканов,
- привод 11 для вращения вала 12 устройства 10 отделения стакана, расположенного на станции S отделения стаканов, и
- дополнительный электрический привод 24 для управления приводом движения или пальцем 25 отделения стакана, определяющим вышеупомянутый приводной выходи или устройство отбора мощности привода 11 на/от устройства 10 отделения 10 стакана, расположенного на станции S отделения стакана.
В частности, как показано на фиг.4 и 7, кожух 23 содержит нижнюю часть 26, в приведенном примере имеющую форму параллелепипеда, и верхнюю часть 27 с центральной цилиндрической полостью 28, соосной с осью 6 и с которой зацепляется гильза 19 и хвостовик 20, выступающие из центральной ступицы 15.
Хвостовик 20 проходит аксиально внутрь цилиндрической полости 28 на длину, достаточную для углового зацепления с пальцем 29, выступающим вверх от дна цилиндрической полости 28 соосно с осью 6 и определяющим выходной элемент привода 21, расположенного в нижней части 26 кожуха 23.
Как показано на фиг.4, цилиндрическая полость 28 имеет такой размер относительно хвостовика 20, чтобы точное позиционирование между опорой 4 колонн и приводным узлом 7, необходимое, как будет показано ниже, для управления угловым положением турели 3 держателя стаканов относительно станции S отделения стаканов.
Предпочтительно, для повышения точности позиционирования, в гнезде, сформированном в торце хвостовика 20 установлено уплотняющее кольцо для взаимодействия с внутренней поверхностью цилиндрической полости 28, чтобы гасить во время работы вибрации, вызванные вращением турели 3 держателя стаканов.
Предпочтительно, для стабильного и плавного вращения турели 3 держателя стаканов на приводном узле 7, верхняя часть 27 кожуха 23 ограничена плоской поверхностью, перпендикулярной оси 6 и соединенной с нижней поверхностью 17 ступицы 15 множеством роликов 30 скольжения, установленных в верхней части 27 кожуха 23 и выполненных с возможностью скольжения, когда турель 3 вращается, по кольцевой области поверхности 17, окружающей отверстия 22.
Как показано на фиг.7 и 8, привод 11 имеет выходной вал 32, установленный с возможностью вращения вокруг оси, параллельной оси 6, и оснащенный шестерней 33, соединенной с шестерней 34, вхолостую установленной на кожухе 23 и соединенной с шестерней 35, закрепленной шпонкой на нижнем конце приводного пальца 25, и находящейся в зацеплении с промежуточной шестерней 34 для кинематического соединения приводного пальца 25 с выходным валом 32 привода 11 и выборочного соединения привода 11 с устройством 10 отделения стакана, расположенным на станции S отделения стакана.
Для этого приводной палец 25 расположен параллельно оси 6, проходит вверх через верхнюю часть 27 кожуха 23, и на своем верхнем свободном конце имеет шлицевой конический конец 36.
Приводной палец 25 выполнен с возможностью осевого перемещения под действием привода 24, между нормальным опущенным или отведенным положением (фиг.10), в котором шлицевой конический конец 36 находится по существу внутри верхней части 27 кожуха 23 (фиг.7), и выдвинутым или поднятым рабочим положением (фиг.11), в котором шлицевой конический конец 36 выступает из вершины верхней части 27 через отверстие 37, и находится в зацеплении с шлицевым коническим отверстием 13 устройства 10 отделения стакана, расположенного на станции S отделения стакана, что делает приводной палец 25 и входной вал 12 устройства 10 отделения стакана интегрированными в угловом направлении.
Когда приводной палец 25 находится в выдвинутом рабочем положении, работа привода 11 заставляет приводной палец 25 и, следовательно, входной вал 12 устройства 10 отделения стакана вращаться, что приводит к отделению стакана 2 от стопки стаканов 2.
К приводу 11 подсоединен микропереключатель 38. Микропереключатель 38 расположен в кожухе 23 и взаимодействует с управляющим элементом 39, который воздействует на микропереключатель 38 в ответ на вращение вала 12 устройства 10 отделения стакана, находящегося на станции S отделения стакана.
В предпочтительном варианте, показанном на фиг.4, 5 и 7, управляющий элемент 39 установлен на кожухе 23 и содержит качающийся рычаг с первой ветвью, которая определяет управляющий рычаг 39a для управления микропереключателем 38, и второй ветвью, которая определяет толкатель 39b, который выступает из вершины кожуха 23 и находится в зацеплении с утопленным участком 18 поверхности 17 центральной ступицы 15 в области утопленного участка 18, выровненного со станцией S отделения стакана, чтобы взаимодействовать через отверстие 40, сформированное в центральной ступице 15 с кулачком 41, посаженным на шпонке на вал 12 устройства 10 отделения стакана, находящегося на станции S отделения стакана.
Как показано на фиг.5, каждый вал 12 имеет соответствующий кулачок 41, обращенный к соответствующему отверстию 40, и кулачки 41 имеют такую форму чтобы смещать толкатель 39b, что приводит к смещению управляющего рычага 39a, который управляет микропереключателем 38, только когда вал 12 расположен и вращается в станции 12 отделения стакана.
Как показано на фиг.9, приводной палец 25 движется между нижним положением покоя и верхним рабочим положением приводом 24 через трансмиссионный механизм 42, предназначенный для линейного перемещения приводного пальца 25 параллельно оси 6.
Для того привод 24 предпочтительно является редукторным двигателем, расположенным в нижней части 26 кожуха 23 и имеющим выходной вал 43, установленный для вращения вокруг оси, проходящей поперечно оси 6, а трансмиссионный механизм 42 содержит кулачок 44, посаженный на шпонку на выходном валу 43, и рычаг 45, установленный с возможностью вращения вокруг фиксированной оси 46, параллельной выходному вал 43, имеет свободный конец, шарнирно соединенный через штифтовое соединение с нижней частью приводного пальца 25, и определяет первую ветвь качающегося рычага, шарнирно установленного на оси 46 и содержащего вторую ветвь, имеющую по существу форму литеры L относительно рычага 45.
Промежуточная часть рычага 45 находится в контакте с кулачком 44, поэтому вращение кулачка 44 приводит к повороту рычага 45 вокруг оси 46. Благодаря штифтовому соединению между рычагом 45 и приводным пальцем 25, поворот рычага 45 приводит к линейному перемещению приводного пальца 25.
В частности, как показано на фиг.10, в опущенном положении покоя приводного пальца 25 кулачок 44 удерживает рычаг 45 повернутым вниз, противодействуя пружине 47, растянутой между фиксированной точкой и свободным концом второй ветви качающегося рычага, и шлицевой конический конец 36 совмещен по вертикали, но выведен из зацепления со шлицевым коническим отверстием 13 устройства 10 отделения стакана, расположенного на станции S отделения стакана.
Как показано на фиг.11, в поднятом рабочем положении приводного пальца 25 кулачок 44 расположен так, чтобы рычаг 45 мог повернуться вверх под действием пружины 47, в результате чего приводной палец 25 движется вверх и шлицевой конический конец 36 входит в зацепления со шлицевым коническим отверстием 13. В этом положении кулачок 44 взаимодействует с микропереключателем 48, соединенным с приводом 24.
Наконец, как показано на фиг.7-9, диспенсер 1 стаканов содержит электронную систему 50 управления для управления работой диспенсера 1 стаканов, содержащую:
- сенсорную систему 51, выполненную с возможностью генерировать электрические выходные сигналы для определения абсолютного углового положения турели 3 держателя стаканов; и
- электронный блок 52 управления, электрически соединенный с сенсорной системой 51 для приема от нее электрических сигналов и с приводами 11, 21, 24 приводного узла 7 для подачи на них электрических команд.
Сенсорная система 51 содержит магнитный датчик 53 углового положения, предназначенный для вывода электрического сигнала, указывающего на абсолютное угловое положение турели 3 держателя стаканов.
Магнитный датчик 53 углового положения содержит:
- диаметрально намагниченный кольцевой магнит 54, установленный на турели 3 держателя стаканов в аксиально фиксированном положении соосно оси 6, и
- магнитный датчик 55 углового положения, расположенный в фиксированном положении рядом с кольцевым магнитом 54 для вывода электрического сигнала, указывающего на угловое положение генерируемого им магнитного поля.
В частности, в варианте, показанном на фиг.5 и 9, кольцевой магнит 54 установлен на центральной ступице 15 и, в частности, в показанном примере, аксиально зафиксирован шайбой 56 внутри гильзы 19, сверху хвостовика 20 так, чтобы вращаться интегрально с турелью 3 держателя стаканов вокруг оси 6.
В непоказанном варианте, гильза 19 и хвостовик 20 выполнены заодно, а кольцевой магнит 54 расположен внутри или снаружи хвостовика 20, и его угловое и аксиальное положение зафиксировано.
Магнитный датчик 55 углового положения расположен рядом с кольцевым магнитом 54 на плоскости, в которой он лежит, перпендикулярной оси 6, чтобы воспринимать генерируемое им магнитное поле и выводит электрический сигнал, указывающий на абсолютное угловое положение этого магнитного поля.
В частности, магнитный датчик 55 углового положения установлен на печатной плате 57, расположенной внутри верхней части 27 кожуха 23 приводного узла 7, и на которой также расположен микропереключатель 38.
Сенсорная система 51 далее содержит магнитное устройство 58 бесконтактного датчика, выполненное с выводить электрические сигналы так, чтобы позволить электронному блоку 52 управления определять, когда турель 3 держателя стаканов находится в исходном угловом положении, определенном на стадии конструирования.
Магнитное устройство 58 бесконтактного датчика содержит:
- постоянный магнит 59, установленный на опоре 4 колонны в положении, смещенном от оси 6 так, чтобы двигаться по круговой траектории вокруг оси 6 во время вращения турели 3 вокруг оси 6; и
- датчик 60 Холла, расположенный в фиксированном положении так, чтобы воспринимать магнитное поле, генерируемое постоянным магнитом 59 когда турель 3 находится в исходном положении.
В частности, постоянный магнит 59 расположен внутри соответствующего гнезда 61 (см. фиг.4), сформированного в опоре 4 колонн, а датчик 60 Холла расположен в соответствующем гнезде, сформированном в верхней части 27 кожуха 23 приводного узла 7, под опорой 4 колонн, чтобы быть обращенным вертикально к постоянному магниту 59, когда турель 3 держателя стаканов находится в исходном угловом положении.
Сенсорная система 51 далее содержит еще одно устройство 63 датчика положения, выполненное с возможностью выводить электрические сигналы так, чтобы электронный блок 52 управления мог определять положение приводного пальца 25 во время его движения в положение кинематического соединения и из него, в котором приводной палец 25 кинематически соединен с приводным входом или устройством отбора мощности 12 устройства 10 отделения стакана, находящегося на станции S отделения стакана.
Устройство 63 датчика положения предназначено для вывода электрических сигналов так, чтобы электронный блок 52 управления мог определить, когда приводной палец 25 принимает:
- убранное положение покоя, показанное на фиг.10, в которой шлицевой конический конец 36 остается по существу внутри верхней части 27 кожухе 23,
- выдвинутое положение, показанное на фиг.11, в котором шлицевой конический конец 36 выступает из верхней части 27 через отверстие 37 и находится в зацеплении со шлицевым коническим отверстием 13 устройства 10 отделения стакана, находящегося на станции S отделения стакана, что делает приводной палец 25 и входной вал 12 устройства 10 отделения стакана интегральными в угловом направлении, и
- промежуточное положения пуска привода (не показано), находящееся между убранным и выдвинутым положениями, в котором шлицевой конический конец 36 начинает входить в зацепление с отверстием 22, как более подробно описано ниже.
В варианте, показанном на фиг.9, 10 и 11, устройство 63 датчика положения содержит печатную плату 64, расположенную внутри верхней части 27 кожуха 23 приводного узла 7, и на которой установлены три датчика 65, 66 и 67 для определения положения выступа 68, сформированного на свободном конце второй ветви качающегося рычага, шарнирно установленного на сои 46, когда приводной палец 25 принимает три вышеуказанных положения.
В частности, как показано на фиг.10 и 11, в убранном положении покоя приводного пальца 25, выступ 68 взаимодействует с датчиком 66, а в положении начала зацепления (не показано) выступ 68 взаимодействует с датчиком 67, который расположен между датчиками 65 и 66.
Как показано на фиг.7, сенсорная система 51 далее содержит оптический сенсор 69, установленный на приводном узле 7 в таком положении, чтобы электронный блок 52 управления мог определять наличие или отсутствие стаканов 2 внутри колонны 5, когда эта колонна подходит к станции S отделения стакана, чтобы остановить ее или пропустить дальше и, следовательно, вращать турель 3 держателя стаканов, когда колонна 5, расположенная на станции S отделения стакана, пуста.
Согласно еще одному аспекту настоящего изобретения электронный блок 52 управления запрограммирован не получение электрических выходных сигналов от магнитного датчика 55 углового положения, от устройства 53 магнитного датчика углового положения, от датчика 60 Холла, от устройства 58 магнитного бесконтактного датчика и от датчиков 65, 66 и 67 устройства 63 датчика положения и, на основе полученных сигналов инициализировать угловое позиционирование турели 3 держателя стаканов, используя приводной палец 25 в качестве щупа для поиска и определения угловых положений отверстий 22, сформированных в центральной ступице 15 опоры 4 колонн.
В частности, электронный блок 52 управления выполнен с возможностью:
i) приводить в действие привод 21 для вращения турели 3 держателя стаканов в первом направлении вращения;
ii) приводить в действие привод 24 для перемещения приводного пальца 25 из отведенного положения покоя в выдвинутое положение для столкновения с поверхностью 17 центральной ступицы 15 опоры 4 колонн и скольжения по ней во время вращения турели 3 держателя стаканов;
iii) определять, когда приводной палец 25 начинает зацепляться с отверстием 22 на основе электрического выходного сигнала датчика 67 положения;
iv) в ответ на это определение на основе электрического выходного сигнала датчика 67 положения, что приводной палец 25 начинает зацепляться с отверстием 22:
- запоминать абсолютное угловое положение, в котором приводной палец 25 начинает входить в отверстие 22, на которое указывает электрический выходной сигнал магнитного датчика 55 углового положения магнитного устройства 55 датчика углового положения,
- управлять приводом 21 для остановки вращения турели 3 держателя стаканов, и
- управлять приводом 24 для извлечения приводного пальца 25 из отверстия 22 и отвода его обратно в отведенное положение;
v) повторить этапы i) - iv), чтобы турель 3 держателя стаканов совершила полный оборот в первом направлении и, тем самым, отыскать все отверстия 22, сформированные в центральной ступице 15 опоры 4 колонн и рассчитать и запомнить абсолютные угловые положения, где приводной палец 25 начинает входить в отверстия 22 во время вращения турели 3 в первом направлении вращения;
vi) повторить этапы i)-v), чтобы турель 3 совершила полный оборот во втором направлении, противоположном первому, и тем самым, отыскать все отверстия 22, сформированные в центральной ступице 15 опоры 4 колонн и рассчитать и запомнить абсолютные угловые положения, где приводной палец 25 начинает входить в отверстия 22 во время вращения турели 3 во втором направлении вращения;
vii) рассчитать абсолютные угловые положения центров отверстий 22, сформированных в центральной ступице 15 опоры 4 колонн на основе абсолютных угловых положений, в которых приводной палец 25 начинает входить в отверстия 22 во время вращения турели 3 в двух направлениях вращения.
Для удобства электронный блок 52 управления запрограммирован на расчет абсолютного углового положения центра отверстия 22 как средняя величина двух абсолютных угловых положений, в которых приводной палец 25 начинает входить в отверстие 22 и рассчитывается при двух направлениях вращения турели 3 держателя стаканов.
Кроме того, электронный блок 52 управления для удобства запрограммирован на идентификацию и запоминание при установке начального положения турели 3 держателя стаканов на основе электрического выходного сигнала датчика 60 Холла магнитного устройства 58 бесконтактного датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕРЖАТЕЛЬ СТАКАНОВ ДЛЯ МАШИНЫ ДЛЯ ПРОДАЖИ НАПИТКОВ | 2020 |
|
RU2808943C1 |
| УСТРОЙСТВО ДЛЯ ВЫДАЧИ СТАКАНОВ ДЛЯ МАШИНЫ ПО ПРОДАЖЕ НАПИТКОВ | 2017 |
|
RU2728091C2 |
| ДИСПЕНСЕР СТАКАНОВ ДЛЯ МАШИНЫ ПО ПРОДАЖЕ НАПИТКОВ | 2020 |
|
RU2816911C1 |
| Роботизированный комплекс для приготовления напитков | 2020 |
|
RU2737695C1 |
| УСТРОЙСТВО ВЫДАЧИ СТАКАНОВ В АВТОМАТЕ ДЛЯ ПРОДАЖИ НАПИТКОВ | 2016 |
|
RU2699147C1 |
| КЕРНООТБОРНЫЙ СНАРЯД | 2003 |
|
RU2252307C1 |
| НАСОСНОЕ УСТРОЙСТВО | 2014 |
|
RU2674296C2 |
| НАСОСНОЕ УСТРОЙСТВО | 2014 |
|
RU2672352C2 |
| ДИСПЕНСЕР ДАТЧИКОВ И МЕХАНИЗМ ДЛЯ ИЗВЛЕЧЕНИЯ ДАТЧИКА | 2005 |
|
RU2390023C2 |
| АВТОМАТ ДЛЯ ВЫДАЧИ СТАКАНОВ | 2006 |
|
RU2310916C1 |
Диспенсер (1) стаканов, содержащий турель (3) держателя стаканов, содержащий множество колонн (5), в которых расположены соответствующие стопки стаканов (2), и каждая из которых снабжена соединенным с ней устройством (10) освобождения стаканов, предназначенных для отделения индивидуального стакана (2) от стопки стаканов (2); и приводной узел (7) с электронным управлением, содержащий первый электрический привод (21) для вращения турели (3) держателя стаканов и второй электрический привод (11) для приведения в действие устройств (10) отделения стакана колонн (5). Диспенсер (1) далее содержит электронную систему (50) управления, содержащую сенсорную систему (51), выполненную с возможностью выводить электрические сигналы, позволяющие определить угловое положение турели (3) держателя стаканов, и электронный блок (52) управления, электрически соединенный с сенсорной системой (51) для приема электрических выходных сигналов, и с первым и вторым приводами для подачи на них электрических команд. Сенсорная система (51) содержит магнитное устройство (53) датчика углового положения, выполненное с возможностью выводить электрические сигналы, позволяющие электронному блоку (52) управления определять абсолютное угловое положение турели (3) держателя стаканов, и содержащее диаметрально намагниченный кольцевой магнит (54), установленный на турели (3) держателя стаканов, в аксиально фиксированном положении соосно с осью (6) вращения турели (3) держателя стаканов так, чтобы диаметрально намагниченный кольцевой магнит (54) вращался вместе с турелью (3) держателя стаканов; и магнитный датчик (55) углового положения, расположенный в фиксированном положении рядом с кольцевым магнитом (54) в плоскости кольцевого магнита, поперечной оси (6) вращения так, чтобы магнитный датчик (55) углового положения выводил электрические сигналы, указывающие на абсолютное угловое положение магнитного поля, генерируемого кольцевым магнитом (54). 2 н. и 9 з.п. ф-лы, 11 ил.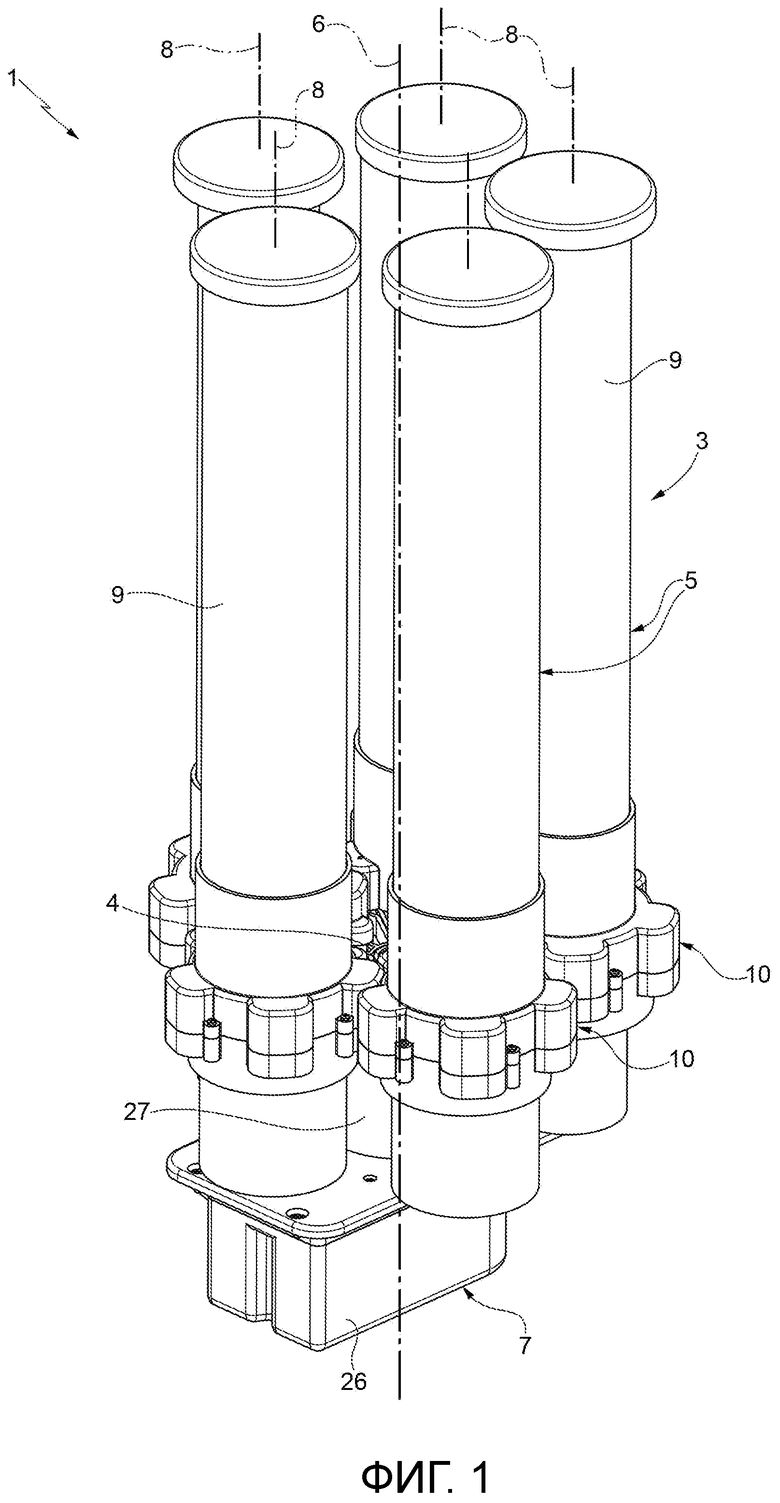
1. Диспенсер (1) стаканов, в частности, для автомата по продаже напитков, в котором:
диспенсер (1) стаканов содержит турель (3) держателя стаканов, установленную с возможностью вращения вокруг оси (6) вращения и содержащую опору (4) колонн, выполненную с возможностью поддерживать множество колонн (5), расположенных вокруг оси (6) вращения, каждая из которых приспособлена для хранения соответствующей стопки стаканов (2) и снабжена соответствующим устройством (10) отделения стакана, выполненным с возможностью отделения индивидуальных стаканов (2) от стопки стаканов (2);
диспенсер (1) стаканов далее содержит приводной узел (7) с электронным управлением, предназначенный для перемещения турели (3) держателя стаканов и приведения в действие устройства (10) отделения стакана;
приводной узел (7) содержит:
- первый электрический привод (21) для вращения турели (3) держателя стаканов вокруг оси (6) вращения для выборочного подвода колонн (5) к фиксированной станции (S) отделения стакана; и
- второй электрический привод (11) для приведения в действие устройства (10) отделения стакана, соединенного с колонной (5), подведенной к станции (S) отделения стаканов;
диспенсер (1) стаканов далее содержит электронную систему (50) управления для управления работой диспенсера (1) стаканов;
электронная система (5) управления содержит:
- сенсорную систему (51), выполненную с возможностью выводить электрические сигналы, позволяющие определить угловое положение турели (3) держателя стаканов, и
- электронный блок (52) управления, электрически соединенный с сенсорной системой (51) для приема ее электрических выходных сигналов, а также с первым и вторым приводами (21, 11) приводного узла (7) для подачи на них электрических команд;
отличающийся тем, что сенсорная система (51) содержит магнитное устройство (53) датчика углового положения, выполненное с возможностью выводить электрические сигналы, позволяющие электронному блоку (52) управления определять абсолютное угловое положение турели (3) держателя стаканов;
магнитное устройство (53) датчика углового положения содержит:
- диаметрально намагниченный постоянный кольцевой магнит (54), установленный на турели (3) держателя стаканов в аксиально зафиксированном положении соосно с осью (6) вращения турели (3) держателя стаканов так, чтобы диаметрально намагниченный кольцевой магнит (54) вращался вместе с турелью (3) держателя стаканов; и
- магнитный датчик (55) углового положения, установленный на приводном узле (7) так, чтобы находиться в фиксированном положении снаружи кольцевого магнита (54) рядом с кольцевым магнитом (54) на плоскости, в которой лежит кольцевой магнит (54), поперечной оси (6) вращения так, чтобы магнитный датчик (55) углового положения выводил электрический сигнал, указывающий на абсолютное угловое положение магнитного поля, генерируемого кольцевым магнитом (54).
2. Диспенсер по п.1, в котором опора (4) колонны содержит центральную ступицу (15), соосную с осью (6) вращения, и соединенную с выходным валом (29) первого привода (21) для приема от него вращательного движения и вращения турели (3) держателя стаканов; и
в котором кольцевой магнит (54) установлен на центральной ступице (15), а магнитный датчик (55) углового положения установлен в приводном узле (7) так, чтобы, когда центральная ступица (15) соединена с приводным узлом (7), магнитный датчик (55) углового положения был расположен снаружи от кольцевого магнита (54) на плоскости, в которой лежит кольцевой магнит (54).
3. Диспенсер по п.2, в котором центральная ступица (15) содержит соединительную часть (19, 20) для кинематического соединения опоры (4) колонн с первым приводом (21);
в котором выходной вал (29) первого привода (21) расположен внутри полости (28) коробчатого кожуха (23) приводного узла (7) и находится в осевом зацеплении с соединительной частью (19, 20) центральной ступицы (15); и
в котором кольцевой магнит (54) установлен на соединительной части (19, 20) центральной ступицы (15), а магнитный датчик (55) углового положения установлен в кожухе (23) так, что, когда соединительная часть (19, 20) находится в зацеплении с полостью (28), кольцевой магнит (54) и магнитный датчик (55) углового положения расположены рядом друг с другом в одной плоскости.
4. Диспенсер по любому из предшествующих пунктов, в котором сенсорная система (51) далее содержит магнитное устройство (58) бесконтактного датчика, выполненное с возможностью выводить электрические сигналы, чтобы электронный блок (52) управления мог определить, когда турель (3) держателя стаканов находится в исходном угловом положении;
при этом магнитное устройство (58) бесконтактного датчика содержит:
- постоянный магнит (59), установленный на опоре (4) колонн в положении, смещенном от оси (6) вращения так, чтобы двигаться по круговой траектории вокруг оси (6) вращения, когда турель (3) держателя стаканов вращается вокруг оси (6) вращения, и
- датчик (60) Холла, установленный в фиксированном положении так, чтобы определять магнитное поле, генерируемое постоянным магнитом (59), когда турель (3) держателя стаканов находится в исходном угловом положении.
5. Диспенсер по любому из предшествующих пунктов, в котором приводной узел (7) далее содержит:
- устройство (25) отбора мощности, приводимое вторым приводом (11); и
- третий электрический привод (24) для выборочного перемещения устройства (25) отбора мощности в положение кинематического соединения, в котором устройство (25) отбора мощности соединено с силовым входом (14) устройства (10) отделения стакана, расположенным на станции (S) отделения стакана, и из этого положения;
при этом в опоре (4) колонн сформированы сквозные отверстия (22), каждое из которых связано с соответствующей колонной (5) так, чтобы сквозь него, когда соответствующая колонна (5) расположена на станции (S) отделения стакана, проходило устройство (25) отбора мощности во время его движения в положение кинематического соединения, в котором устройство (25) отбора мощности соединено с силовым входом (14) устройства (10) отделения стакана, находящегося на станции (S) отделения стакана, и из этого положения;
сенсорная система (51) далее содержит дополнительное устройство (63) датчика положения, выполненное с возможностью выводить электрические сигналы так, чтобы электронный блок (52) управления мог определять положение устройства (25) отбора мощности во время его движения в положение кинематического соединения, в котором устройство (25) отбора мощности соединено с силовым входом (14) устройства (10) отделения стакана, находящегося на станции (S) отделения стакана, и из этого положения; и
электронный блок (52) управления далее выполнен с возможностью инициализировать турель (3) держателя стаканов, используя устройство (25) отбора мощности как щуп для поиска и запоминания абсолютного углового положения сквозных отверстий (22) в опоре (4) колонн.
6. Диспенсер по п.5, в котором для инициализации турели (3) держателя стаканов электронный блок (52) управления выполнен с возможностью:
i) приводить в действие первый привод (21) для вращения турели (3) держателя стаканов в первом направлении вращения;
ii) приводить в действие третий привод (24) для перемещения устройства (25) отбора мощности в положение кинематического соединения, в котором устройство (25) отбора мощности соединено с силовым входом (14) устройства (10) отделения стакана, находящегося на станции (S) отделения стакана так, чтобы устройство (25) отбора мощности столкнулось с поверхностью (17) центральной ступицы (15) опоры (4) колонн и скользило по ней во время вращения турели (3) держателя стаканов;
iii) определять, когда устройство (25) отбора мощности начинает входить в отверстие (22) на основе электрического выходного сигнала устройства (63) датчика положения;
iv) в ответ на определение, что устройство (25) отбора мощности начинает входить в сквозное отверстие (22):
- запоминать абсолютное угловое положение, в котором устройство (25) отбора мощности начинает входить в сквозное отверстие (22),
- управлять первым приводом (21) для остановки вращения турели (3) держателя стаканов, и
- управлять третьим приводом (24) для извлечения устройства (25) отбора мощности из сквозного отверстия (22);
v) повторить этапы i)-iv), чтобы турель (3) держателя стаканов совершила полный оборот в первом направлении, и тем самым отыскать все сквозные отверстия (22) в опоре (4) колонн и запомнить абсолютные угловые положения, где устройство (25) отбора мощности начинает входить в сквозные отверстия (22) во время вращения турели (3) в первом направлении вращения;
vi) повторить этапы i)-v) в противоположном направлении вращения турели (3) держателя стаканов, чтобы турель (3) держателя стаканов совершила полный оборот во втором направлении, противоположном первому, и тем самым отыскать все сквозные отверстия (22) в опоре (4) колонн и запомнить абсолютные угловые положения, где устройство (25) отбора мощности начинает входить в сквозные отверстия (22) во время вращения турели (3) во втором направлении вращения; и
vii) рассчитать абсолютные угловые положения центров сквозных отверстий (22), сформированных в опоре (4) колонн на основе абсолютных угловых положений, в которых устройство (25) отбора мощности начинает входить в сквозные отверстия (22) во время вращения турели (3) держателя стаканов в двух направлениях вращения.
7. Диспенсер по п.6, в котором для инициализации турели (3) держателя стаканов электронный блок (52) управления далее выполнен с возможностью:
- рассчитывать абсолютное угловое положение центра сквозного отверстия (22) в опоре (4) колонн как среднее от двух абсолютных угловых положений, когда устройство (25) отбора мощности начинает входить в сквозное отверстие (22), и рассчитанных в двух направлениях вращения турели (3) держателя стаканов.
8. Диспенсер по любому из пп.5-7, в котором для инициализации турели (3) держателя стаканов электронный блок (52) управления далее выполнен с возможностью:
находить и запоминать исходное угловое положение турели (3) держателя стаканов на основе электрического выходного сигнала датчика (60) Холла магнитного устройства (58) бесконтактного датчика.
9. Диспенсер по любому из пп.5-8, в котором первый, второй и третий электрические приводы (11, 21 24), магнитный датчик (55) углового положения и датчик (60) Холла сгруппированы так, чтобы образовать компактный узел, расположенный в коробчатом кожухе (23), расположенном под турелью (3) держателя стаканов.
10. Диспенсер по п.5, в котором устройство отбора мощности содержит приводной палец (25) со шлицевым коническим концом (36), предназначенным для зацепления со шлицевым коническим отверстием (13), сформированным в каждом устройстве (10) отделения стакана.
11. Автомат для продажи напитков, содержащий диспенсер (1) стаканов по любому из предшествующих пунктов.
| US 2008309324 A1, 18.12.2008 | |||
| US 2011175600 A1, 21.07.2011 | |||
| US 2011290332 A1, 01.12.2011 | |||
| WO 2017158555 A1, 21.09.2017. |

