Ссылка на родственные заявки
В настоящей заявке испрашивается приоритет по европейской заявке на патент №19294194.5, поданной 18.10.2019, и заявках на патент Италии № 102020000024493 и № 102020000024496, поданной 16.10.2020, все содержание которых включено в настоящее описание путем отсылки.
Область техники, к которой относится изобретение
Настоящее изобретение относится к держателю стаканов, который преимущественно, но не исключительно применяется в машинах по продаже напитков, к которым относится нижеследующее описание без потери его общего характера.
Предшествующий уровень техники
В секторе торговли известно размещение диспенсера стаканов внутри машины по продаже напитков для подачи индивидуальных стаканов на станцию заполнения стаканов, где индивидуальные стаканы заполняются напитком и, если необходимо, в них добавляется сахар и ложечка для размешивания.
По существу, диспенсер стаканов содержит башенный или карусельный магазин, содержащий вращающуюся опору, установленный с возможностью вращения вокруг вертикальной оси и предназначенный для хранения соответствующих стопок стаканов. При использовании опора вращается вокруг вертикальной оси так, чтобы поместить трубчатые емкости по одному на станцию отделения стакана, на которой устройство отделения стакана отсоединяется индивидуальный стакан от нижней части стопки и позволяет ему упасть, с соответствующим направлением желобом, в держатель стаканов, из которого, после заполнения напитком, пользователь вручную извлекает стакан.
Обычно каждая трубчатая емкость оснащена соответствующим устройством отсоединения стакана, а держатель стакана - один и является общим для всех трубчатых емкостей и может быть либо стационарным на станции заполнения, либо подвижным между точкой приема стакана и станцией заполнения.
Необходимость подавать стаканы разных размеров заставила производителей оснащать башенный магазин емкостями разных диаметров и использовать регулируемые устройства отсоединения, чтобы можно было изменять их размеры в соответствии с размерами стаканов, содержащихся в соответствующих трубчатых емкостях.
Возможность раздачи стаканов разных размеров привела к потребности в держателе стаканов, способного принимать и надежно удерживать стаканы разных размеров.
Известные в настоящее время решения решают эту проблему по существу двумя способами, применяемыми альтернативно или в комбинации: оснащение торгового автомата держателями стаканов разных размеров и/или использование одного держателя стакана, имеющего форму, по существу форму воронки, позволяющую удерживать стаканы разных размеров.
Решение первого типа описано, например, в ЕР 2 369 559 А1 и имеет недостаток, заключающийся в том, что устройство является слишком громоздким, из-за пространства, занимаемого держателями стаканов и, прежде всего, пространства, необходимого для их перемещения.
Решение второго типа раскрыто, например, в ЕР 11 974 328 А1 и имеет недостаток, заключающийся в том, что стаканы, находящиеся в таком держателе, менее стабильны, чем если бы они находились в держателе, имеющем форму, рассчитанную на соединение со стаканом данного размера. Кроме того, диапазон размеров стакана, которые может принимать такой держатель, довольно ограничен.
Другая проблема с держателями стаканов заключается в их регулярном обслуживании. Держатели стаканов требуют частой очистки операторами, поскольку, что является естественным с точки зрения их работы, при использовании они часто забрызгиваются каплями напитка, отскакивающими от стакана, когда последний заполняется. Проблема необходимости в частой очистке держателя стакана обусловлена тем, что, по существу, тщательная очистка держателя стакана требует его извлечения и полной промывки водой. Эта операция, однако, часто бывает достаточно сложной из-за наличия на держателе стакана электрических частей, например, приводов, предназначенных для перемещения держателя стакана и, поэтому, держатель стакана обычно подвергается поверхностной очистке, ограниченной частями, до которых может добраться оператор, не извлекая держатель стаканов что приводит к неудовлетворительным с точки зрения гигиены результатам.
Раскрытие сущности изобретения
Целью настоящего изобретения является создание усовершенствований, устраняющих вышеописанные недостатки.
Согласно настоящему изобретению, предлагается держатель стакана для машины для продажи напитков, как заявлено в приложенной формуле изобретения.
Краткое описание чертежей
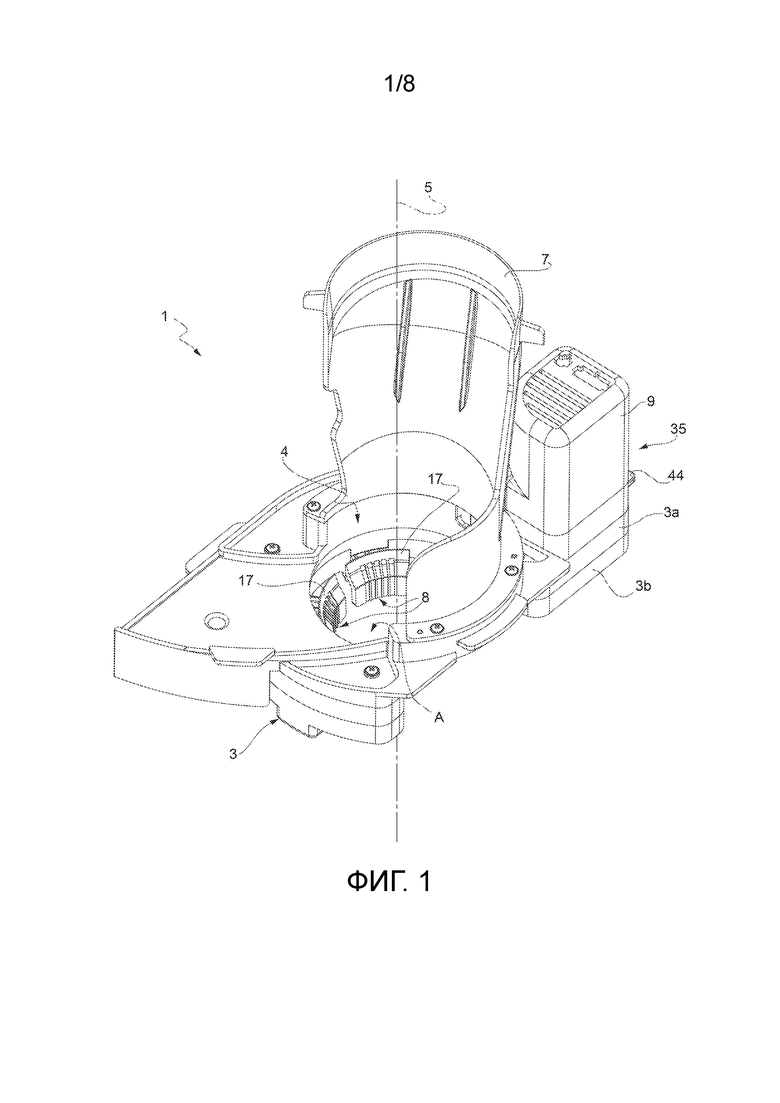
Фиг. 1 - общий вид сверху держателя стакана для машины для продажи напитков согласно предпочтительному варианту осуществления изобретения.
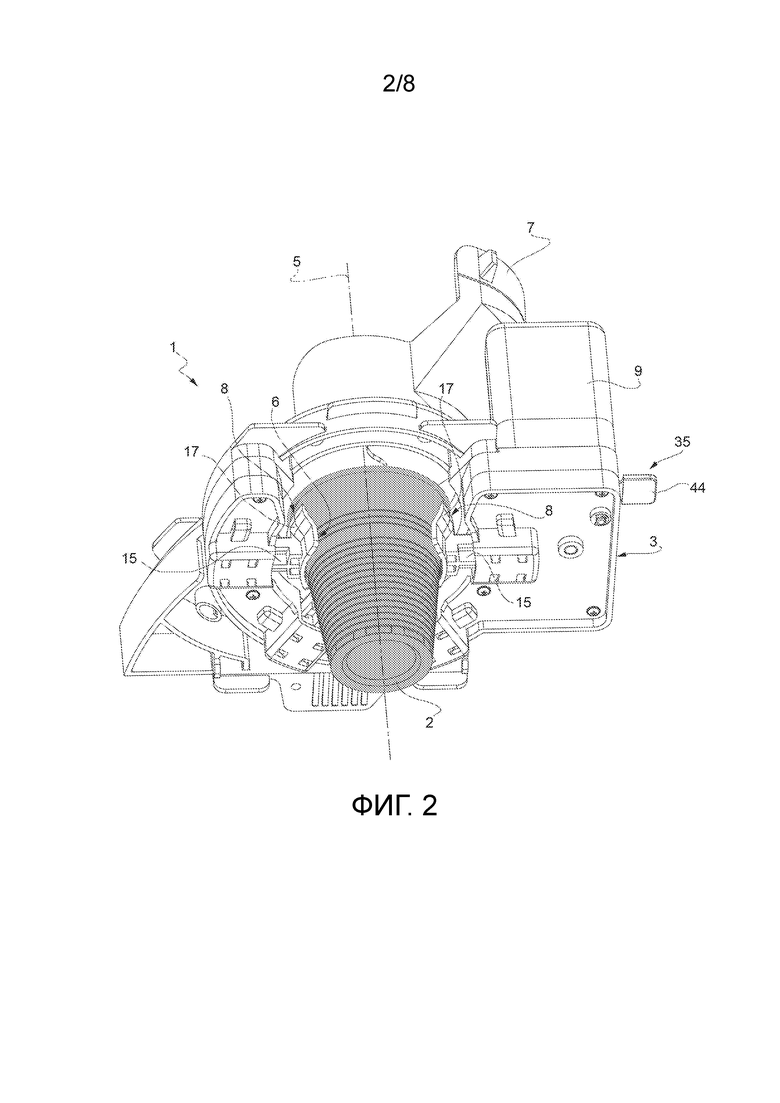
Фиг. 2 - общий вид снизу держателя по фиг. 1.
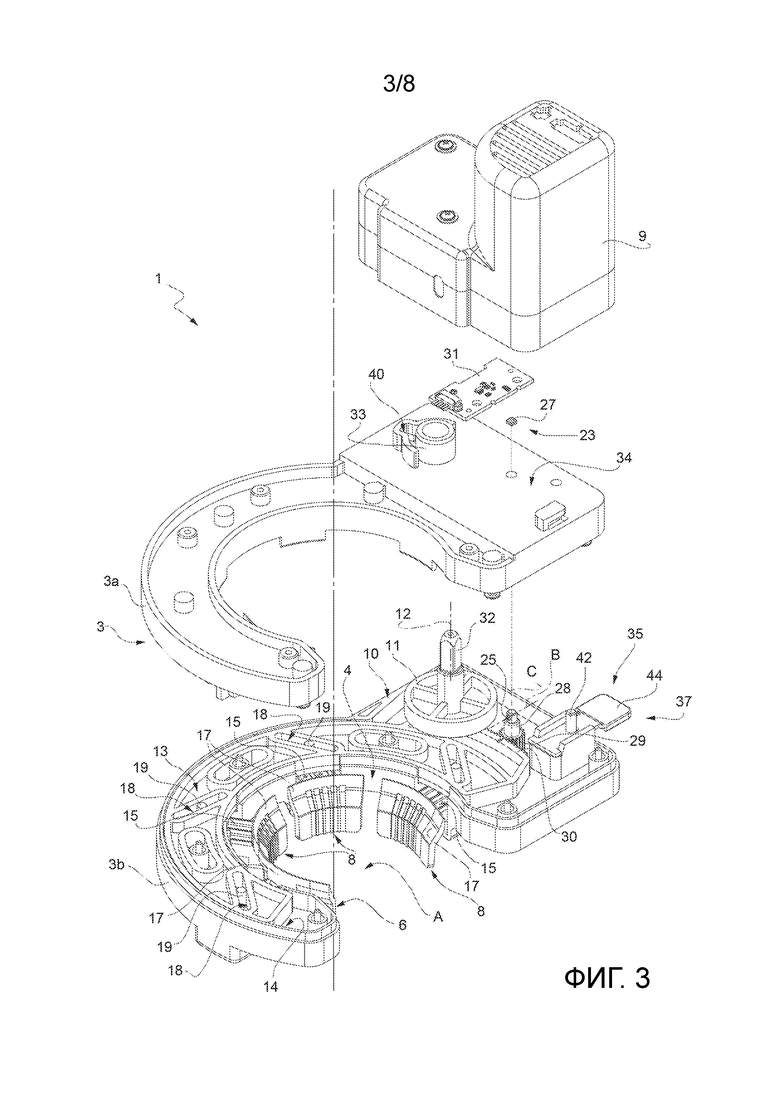
Фиг. 3 - общий вид в разборе, с некоторыми деталями, не показанными для ясности, держателя по фиг. 1.
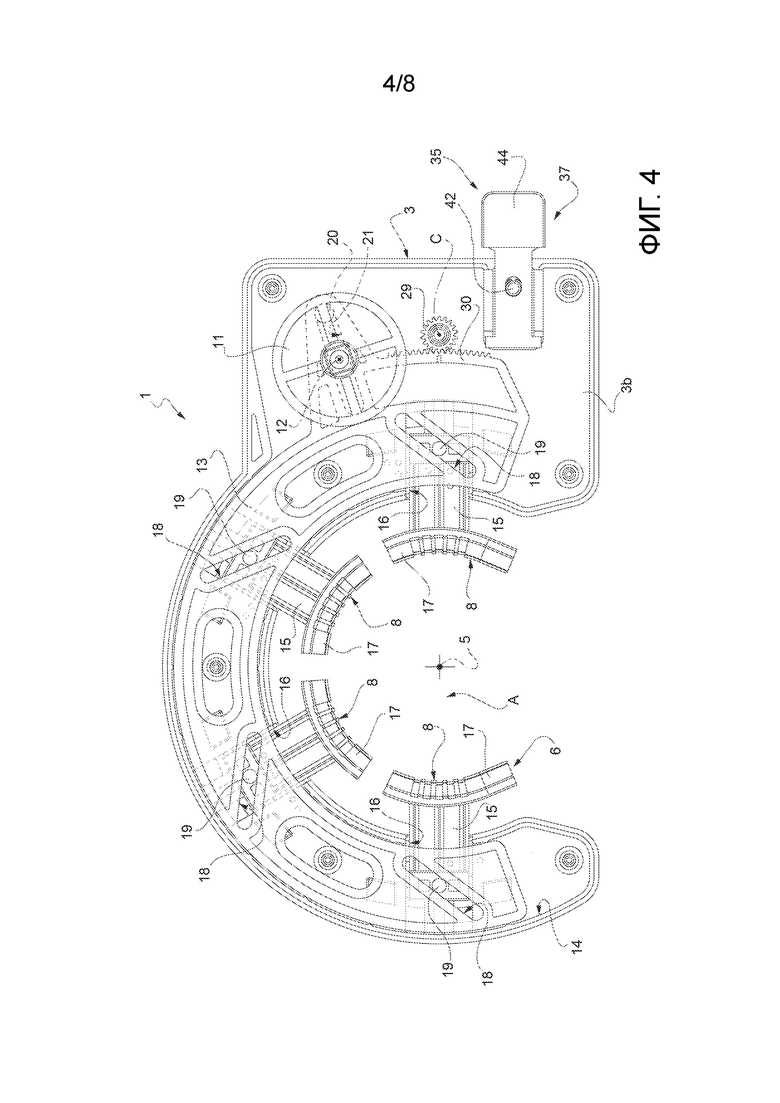
Фиг. 4 - вид сверху детали по фиг. 3.
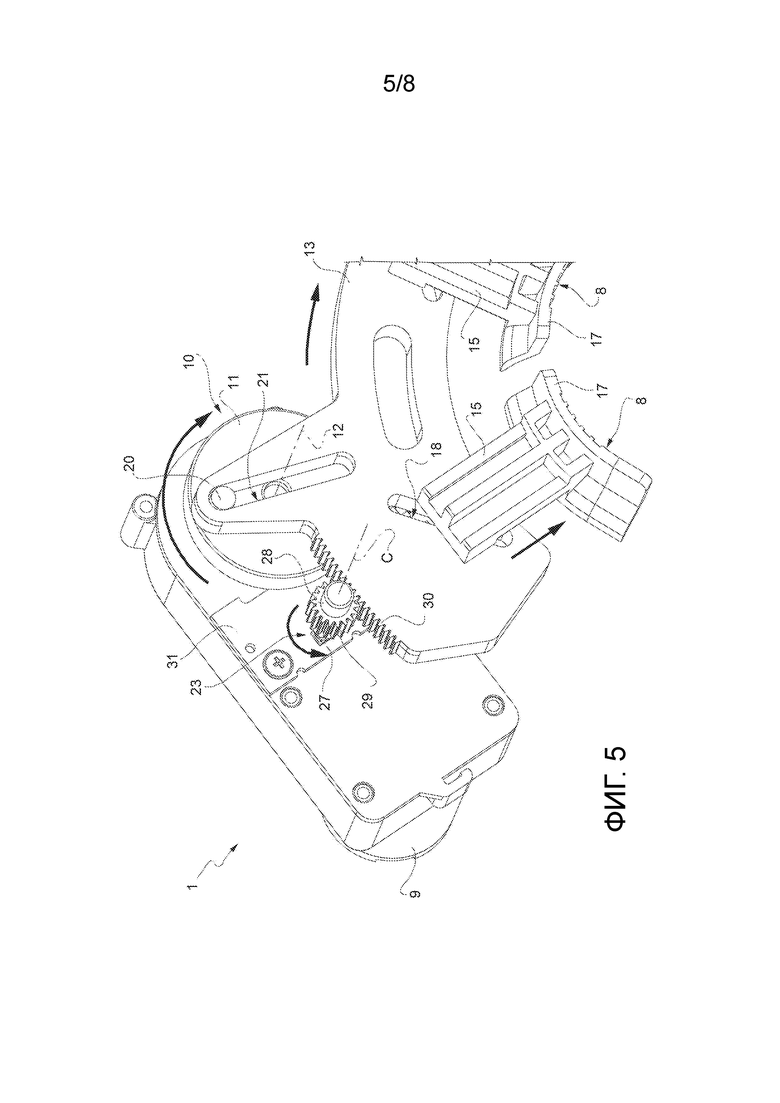
Фиг. 5 - общий вид снизу в увеличенном масштабе детали по фиг. 1 с некоторыми деталями, не показанными для ясности.
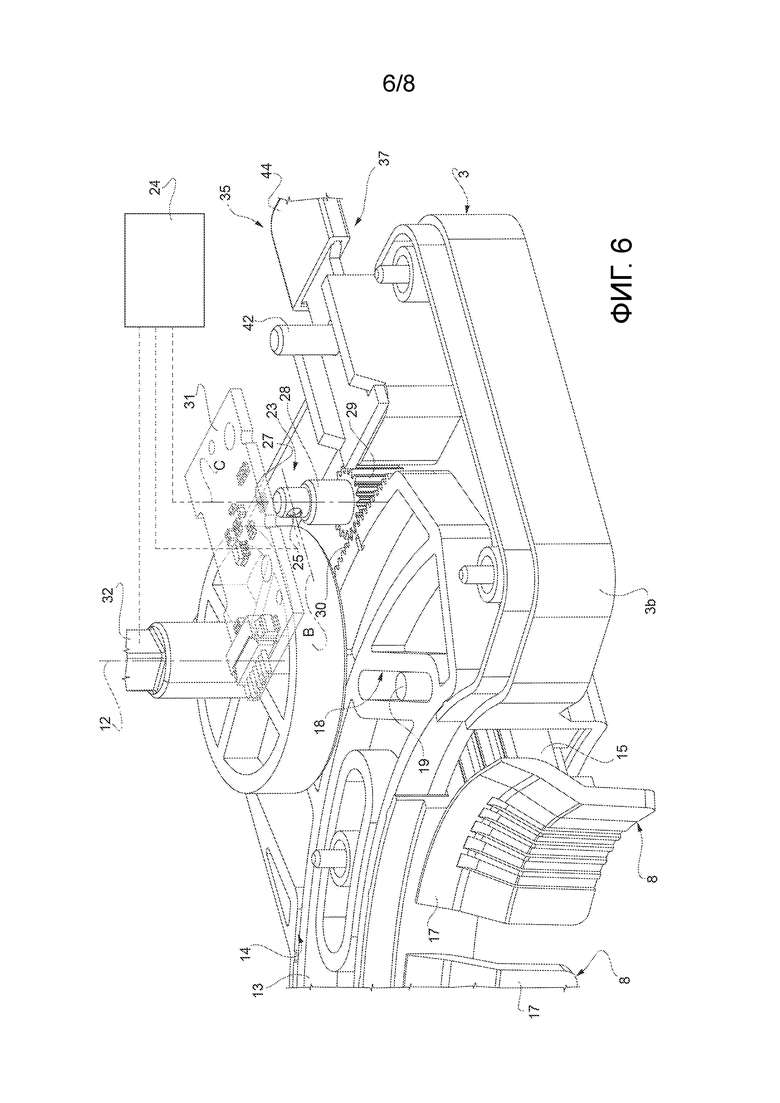
Фиг. 6 - общий вид сверху в увеличенном масштабе детали по фиг. 1 с некоторыми деталями, не показанными для ясности.
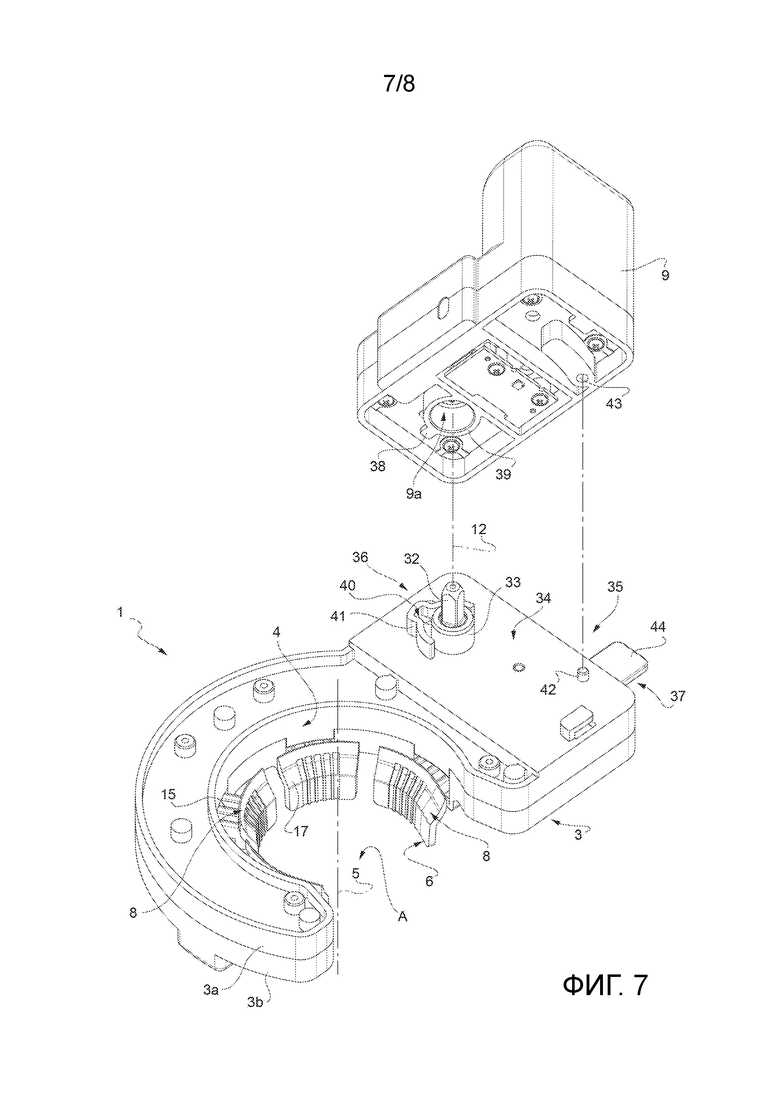
Фиг. 7 - общий вид в разборе детали по фиг. 1.
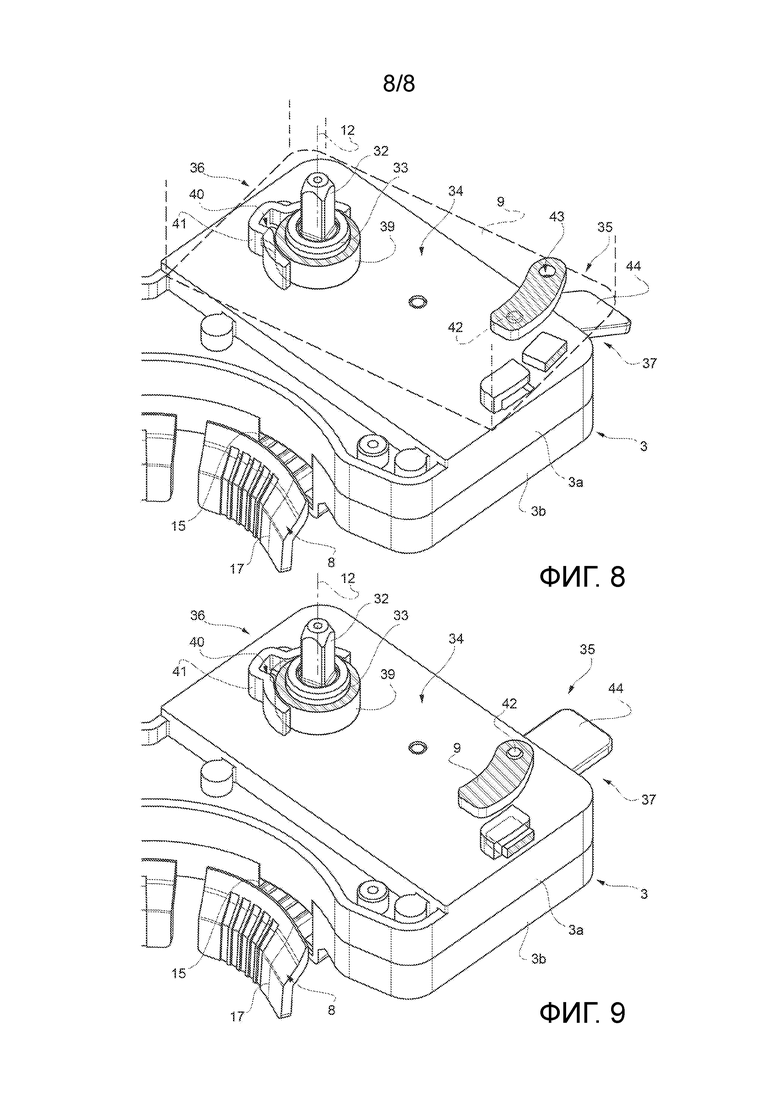
Фиг. 8 и 9 иллюстрируют в увеличенном масштабе деталь по фиг. 7 в других монтажных положениях, с некоторыми деталями, не показанными для ясности.
Подробное описание предпочтительных вариантов осуществления изобретения
Далее следует подробное описание настоящего изобретения со ссылками на сопроводительные чертежи, чтобы специалист мог воспроизвести и использовать его. Специалистам будут понятны различные изменения, которые могут в описанные варианты осуществления, и описанные общие принципы могут быть применены к другим вариантам осуществления, не выходя за пределы объема защиты настоящего изобретения, который определен приложенной формулой. Таким образом, настоящее изобретение не следует считать ограниченным описанными и проиллюстрированными вариантами осуществления, но ему следует придавать наиболее широкий объем защиты в соответствии с описанными и заявленными характеристиками.
Если не определено иное, все технические и научные термины, используемые в настоящем описании, имеют то же значение, которое им придают специалисты в области, к которой относится настоящее изобретение. В случае конфликта настоящее описание, включая приведенные определения, будет обязывающим. Кроме того, примеры приведены только в целях иллюстрации и как таковые не должны считаться ограничивающими.
Для облегчения понимания описанных здесь вариантов осуществления будут приведены ссылки на некоторые конкретные варианты осуществления и для их описания будет использован специфический язык. Терминология, используемая в настоящем документе, имеет целью описание только конкретных вариантов осуществления и не предназначена для ограничения объема настоящего изобретения.
На сопроводительных чертежах позицией 1 обозначен держатель стакана в целом для машины для продажи напитков (не показана).
Держатель 1 стакана обычно расположен на станции заполнения стакана и связан с диспенсером стаканов, например, относящимся к типу, описанному и показанному в WO 2017/158555 А1 настоящего заявителя, для приема из диспенсера стаканов индивидуального стакана 2 и удержания стакана 2 под одним или более соплом, предназначенным для раздачи ингредиентов напитка.
Обычно станция заполнения стакана совпадает со станцией выдачи, где стакан 2, заполненный напитком, забирается пользователем и, для этого, держатель 1 стакана имеет такую форму, чтобы стакан 2 мог поперечно выскальзывать из держателя. В одном варианте осуществления станция выдачи не совпадает со станцией заполнения, и держатель 1 стакана выполнен с возможностью перемещения между станцией заполнения и станцией выдачи.
Держатель 1 стакана содержит раму 3, имеющую такую форму, чтобы определять канал 4 падения стакана с вертикальной осью 5. Предпочтительно, канал 4 падения стакана имеет, по меньшей мере в нижней его части, продольное отверстие, предпочтительно с угловой шириной приблизительно. 90°.
Держатель 1 стакана дополнительно содержит ползун 7, установленный на раме 3 и предназначенный для приема стакана 2 из диспенсера стаканов и подачи стакана 2 на входное отверстие канала 4 в положении максимально сцентрированном относительно оси 5.
Наконец, держатель 1 стакана содержит устройство удержания стакана, расположенное в канале 4 падения стакана, на его выходном конце, для удержания стакана 2, который каждый раз подается в канал 4 падения стакана.
Устройство удержания стакана содержит множество удерживающих стакан элементов 8, которые определяют между собой область А удержания, соосную оси 5 и предназначенную для размещения стакана 2, когда он поддерживается удерживающими элементами 8.
Удерживающие элементы 8 установлены с возможностью скольжения на раме 3 для скольжения в соответствующих радиальных направлениях относительно оси 5 так, чтобы расширять или сужать область А удержания в соответствии с размерами удерживаемого стакана 2.
Для перемещения удерживающих элементов 8 держатель 1 стаканов содержит электрический привод 9 и трансмиссию 10, которые предназначены и расположены для преобразования вращательного движения электрического привода 9 в одновременное линейное перемещение удерживающих элементов 8 в соответствующих радиальных направлениях.
Как показано на сопроводительных чертежах, рама 3 содержит верхний полукожух 3a и нижний полукожух 3b, соединенные друг с другом, а электрический привод 9 является мотор-редуктором, установленным на верхнем полукожухе 3a.
Трансмиссия 10 расположена между верхним полукожухом 3a и нижним полукожухом 3b и предпочтительно содержит кулисный механизм с щелью, в которой вращение почасовой стрелке или против часовой стрелки колеса 11 вокруг оси 12 вращения, параллельной оси 5, передается на колебательный элемент 13, который установлен для колебаний вокруг оси 5 в ответ на вращение колеса 11 и кинематически соединен с удерживающими элементами 8 для преобразования его собственного колебательного движения вокруг оси 5 в возвратно-поступательное прямолинейное перемещение удерживающих элементов 8 в соответствующих радиальных направлениях.
В частности, колебательный элемент 13, который управляет радиальным скользящим перемещением удерживающих элементов 8, определено сектором, имеющим форму дуги окружности, установленным соосно оси 5, который проходит в плоскости, перпендикулярной оси 5 и выполнен для зацепления с возможностью скольжения с криволинейной направляющей 14, образованной в раме 3, в частности, в нижнем полукожухе 3b, и соосной оси 5.
Предпочтительно, колебательный элемент 13 в своем вращательном движении вокруг оси 5 направляется также множеством ползунов, установленных в нижнем полукожухе 3b и находящихся в зацеплении с возможностью скольжения с соответствующими криволинейными щелями, образованными в колебательном элементе 13.
Удерживающие стакан элементы 8 установлены на колебательном элементе 13 и распределены, предпочтительно равномерно, по дуге приблизительно. 270° так, чтобы образовывать между двумя удерживающими стакан элементами 8, расположенными на свободных концах колебательного элемента 13, отверстие, соответствующее вышеописанному продольному отверстию в канале 4 падения стакана и имеющее какую же протяженность.
Каждый удерживающий элемент 8 дополнительно содержит дугообразную часть 17, зацепляющуюся со стаканом, которая соединена с радиально внутренним концом соответствующего направляющего скользящего блока 15, и ограничивает вместе с другими частями 17 зацепления со стаканом вышеуказанную область А удержания.
Колебательный элемент 13 управляет удерживающими стакан элементами 8 через кулачковый механизм. Для этого колебательный элемент 13 обеспечен продольными щелями 18, каждая из которых обращена к соответствующему направляющем скользящему блоку 15 и выполнена с возможностью скользящего зацепления с соответствующим следящим элементом или пальцем 19, выполненным на соответствующем направляющем скользящем блоке 15.
Щели 18 ориентированы относительно радиального направления так, чтобы в ответ на вращение колебательного элемента 13 вокруг оси 5, удерживающие элементы 8 перемещались радиально от оси 5 или к ней в соответствии с направлением вращения колебательного элемента 13.
Колебательный элемент 13 приводится в движение колесом 11 посредством кулисного механизма, предназначено, как было указано, для преобразования непрерывного вращения колеса 11 в возвратно-поступательное колебательное движение колебательного элемента 13 вокруг оси 5 и, через это колебательное движение колебательного элемента 13, в радиальное линейное перемещение удерживающих элементов 8.
Как показано на фиг. 3, 3, 5 и 7, колесо 11 установлено на нижнем полукожухе 3a и кинематически соединено посредством вала 32 с выходным валом 9a электрического привода 9, расположенным на нижней стенке кожуха электрического привода 9.
В частности, вал 32 выполнен за одно целое с колесом 11 и проходит вверх от центра колеса 11 и параллельно оси 5, проходит сквозь верхнюю стенку 34 верхнего полукожуха 3a до зацепления с втулкой 33, соосной оси 12.
Свободный конец вала 32 имеет призматическую форму и выступает из втулки 33 для зацепления с выходным валом 9a электрического привода 9, тем самым создавая угловое соединение привода 9 с колесом 11 и передавая колебательное движение на колебательный элемент 13.
На противоположной стороне вала 13 на колесе 11 выполнен смещенный палец 20, параллельный осям 5 и 12, и находящийся в зацеплении с возможностью скольжения с прямолинейной щелью 21, образованной в колебательном элементе 13.
В другом варианте осуществления (не показан) колебательный элемент 13 образован не сектором в форме дуги окружности, а круглым кольцом, соосным оси 5, и удерживающие элементы 8 распределены по колебательному элементу 13 так, чтобы удерживать стакан 2 по всей окружности стакана 2. В этом случае, следовательно, отверстие 6 отсутствует и стакан 2 не извлекается вручную пользователем, а высвобождается на поверхность отсека выдачи стакана путем радиального раскрытия удерживающих стакан элементов 8. В этом варианте осуществления держатель 1 стакана может выполнять по меньшей мере одно перемещение в направлении, параллельном оси 5 так, чтобы он мог подниматься и опускаться, так, чтобы стакан 2, заполненный напитком, легче высвобождался на опорную поверхность в отсеке выдачи стакана.
Как показано на фиг. 7 8 и 9, электрический привод 9 установлен на полукожухе 3a посредством устройства 35 для быстрого зацепления и расцепления, предназначенного для легкой и быстрой установки и снятия электрического привода 9 несколькими простыми операциями, что позволяет оператору отсоединить от держателя 1 стакана ту его часть, которая содержит электрические компоненты и промыть остальную часть водой без риска повреждения.
В показанном предпочтительном варианте осуществления устройство 35 для быстрого зацепления и расцепления содержит байонетное соединение 36 и рычажный высвобождающий механизм 37, который приводится в действие вручную оператором и перемещается из блокирующей конфигурации, в которой блокируется отсоединение привода 9 от рамы 3, в высвобождающую конфигурацию, в которой оператору обеспечивается возможность перемещения привода 9 относительно рамы 3 для расцепления байонетного соединения 36 и полного снятия электрического привода 9 с рамы 3.
В показанном предпочтительном варианте осуществления байонетное соединение 36 содержит лапку 38, выступающую поперечно от внешней поверхности гильзы 39, которая выступает от нижней стенки электрического привода 9, окружает выходной вал 9a и, когда электрический привод 9 установлен на раме 3, проходит соосно оси 12 и свободно насажена на втулку 33.
Байонетное соединение 36 дополнительно содержит Г-образную канавку 40 на раме 3 и имеет такую форму, чтобы пересекаться лапкой 38 во время установки и снятия электрического привода 9, чтобы запирать и, соответственно, отпирать байонетное соединение.
В частности, канавка 40 ограничена выступом 41, выступающим от стенки 34 полукожуха 3a рядом с втулкой 33 и имеет такую форму, чтобы определять вертикальный сегмент канавки 40, предназначенный для пересечение лапкой 38 в результате движения электрического привода 9 в направлении, параллельном оси 12, и горизонтальный сегмент канавки 40, предназначенный для пересечения лапкой 38 в результате вращения электрического привода 9 вокруг оси, параллельной оси 12.
Как показано на фиг. 8 и 9, рычажный высвобождающий механизм 37 содержит палец 42, установленный с возможностью скольжения сквозь стенку 34 в направлении, параллельном оси 12 и, когда электрический привод 9 установлен на раме 3, выполнен с возможностью зацепления с отверстием 43 в нижней стенке привода 9.
Рычажный высвобождающий механизм 37 дополнительно содержит приводной рычаг 44, который проходит поперечно относительно пальца 42 и соединен, в частности, жестко соединен, с пальцем 42 так, чтобы приводить в действие палец 42 в ответ на ручное воздействие оператором на приводной рычаг 44.
В частности, приводной рычаг 44 можно вручную смещать из нормального положения покоя, в котором приводной рычаг 44 удерживается пружиной (не показана), в поднятом положении и палец 42 выступает за верхнюю поверхность стенки 34 и входит в зацепление с отверстием 43, в положение высвобождения, в котором приводной рычаг 44 опущен так, что палец 42 не выступает из верхней стенки 34 и высвобождает отверстие 34, в результате чего электрический привод 9 обеспечен возможностью отсоединения в результате расцепления байонетного соединения 36, т.е., в результате поворота электрического привода, способного переместить лапку 38 вдоль горизонтального сегмента канавки 40, и линейного перемещения электрического привода 9 в направлении, параллельном оси 12, позволяющего переместить лапку 38 вдоль вертикального сегмента канавки 40 для полного расцепления электрического привода 9 от рамы 3.
Для повторной установки электрического привода 9 на раму 3, оператору не нужно вновь переводить приводной рычаг 44 в положение высвобождения, поскольку достаточно сориентировать электрический привод 9 так, чтобы выровнять лапку 38 вдоль вертикального сегмента канавки 40, и сдвинуть к стенке 34.
Нижняя стенка электрического привода 9 имеет такую форму, чтобы, когда электрический привод 9 сдвинут к стенке 34, чтобы сдвинуть лапку 38 вдоль вертикального сегмента канавки 40, часть стенки 34 входит в контакт с пальцем 42 и опускает его, чтобы палец не мешал последующему повороту электрического привода 9 для перемещения лапки 38 вдоль горизонтального сегмента канавки 40.
Горизонтальный сегмент канавки 40 имеет такой размер, чтобы, когда лапка 38 достигает конца хода и байонетное соединение 36 находится в положении запирания, палец 42 выровнен с отверстием 43 и входит в зацепление с ним под действием пружины (не показана), которая воздействует на приводной рычаг 44 и, через него, на палец 42, удерживая его в положении покоя.
Держатель 1 стакана дополнительно содержит электронную систему 22 управления для управления работой держателя 1 стакана и выполненную с возможностью определять начальную конфигурация держателя 1 стакана, когда он установлен, и регулировать при эксплуатации размер области А удержания так, чтобы адаптировать ее к размерам используемого стакана 2, и динамически корректировать положение удерживающих стакан элементов 8 для компенсации любых смещений, которые могут возникнуть спустя некоторое время по разным причинам, например, из-за износа или грязи.
В варианте осуществления, где колебательный элемент 13 имеет форму круглого кольца, электронная система 22 управления дополнительно выполнена с возможностью приведения в действие удерживающих стакан элементов 8, чтобы они принимали конфигурацию, в которой стакан 2, заполненный напитком, высвобождался на поддерживающую поверхность отсека выдачи, и переведения удерживающих стакан элементов в конфигурацию удержания стакана, в которой удерживается пустой стакан 2.
Электронная система 22 управления содержит:
- сенсорную систему 23, установленную и предназначенную для вывода электрического сигнала, позволяющего определить размер области А удержания, и
- электронный блок 24 управления, электрически соединенный с сенсорной системой 23 для приема от нее электрического выходного сигнала, и с электрическим приводом 9 для подачи на него электрических управляющих сигналов, и запрограммированный для управления на основе выходных электрических сигналов сенсорной системы 23 электрическим приводом 9 для адаптации размеров области А удержания к размерам стакана 2, используемого для заполнения выбранным напитком.
В частности, сенсорная система 23 содержит устройство 27 магнитного датчика углового положения, установленное и предназначенное для вывода электрических сигналов, указывающих на абсолютное угловое положение колебательного элемента 13 и, следовательно, на абсолютное радиальное положение удерживающих элементов 8.
Для этого, устройство 27 магнитного датчика углового положения содержит:
- постоянный магнит 25 с осевой намагниченностью с осью В намагниченности, установленный для вращения вокруг оси С вращения, ортогональной к оси В намагниченности постоянного магнита 25 и проходящей сквозь нее, в ответ на вращение колебательного элемента 13, и
- магнитный датчик 26 углового положения, установленный в фиксированном положении для вывода электрических сигналов, предпочтительно, цифрового типа, указывающих на угловое положение магнитного поля, генерируемого постоянным магнитом 25.
Постоянный магнит 25 является цилиндрическим магнитом, установленным на валу 28 шестерни 29, установленной на раме 3 для вращения вокруг оси С вращения, которая параллельна оси 5, при этом шестерня 29 выполнена с возможностью зацепления с зубчатым сектором 30, образованным на краю колебательного элемента 13.
Постоянный магнит 25 вставлен в отверстие, образованное на свободном конце вала 28, обращенном к магнитному датчику 25 углового положения и ось которого проходит перпендикулярно оси С вращения, совпадая с осью В намагниченности.
Магнитный датчик 26 углового положения установлен на печатной плате 31, расположенной в фиксированном положении внутри кожуха электрического привода 9 и выровнен с осью С.
Шестерня 29 содержит множество зубьев с постоянным шагом. В одном возможном варианте осуществления шестерня 29 содержит 18 зубьев с шагом 20°. В других вариантах осуществления шестерня 29 может иметь больше или меньше, чем 18 зубьев с шагом больше или меньше 20°.
Поскольку количество зубьев шестерни 29 определяет соответствующее количество возможных дискретных угловых положений, в которых шестерня 29 может произвольно соединяться с зубчатым сектором 30 колебательного элемента 13, когда держатель 1 установлен, электронный блок 24 управления запрограммирован определять начальную конфигурацию держателя 1 стакана, когда он устанавливается, определяемую начальным размером области А удержания, когда держатель 1 стакана установлен.
Для этого в одном варианте осуществления электронный блок 24 управления запрограммирован для:
- определения на основании электрического выходного сигнала магнитного датчика 26 углового положения текущего абсолютного углового положения постоянного магнита 25;
- подачи питания на электрический привод 9 до тех пор, когда на основании текущего абсолютного углового положения постоянного магнита 25, электронный блок 24 управления определит:
- первое изменение направления вращения постоянного магнита 25, вызванное изменением направления колебания колебательного элемента 13 и указывающую не то, что колебательный элемент 13 достиг абсолютного углового положения первого конца хода, соответствующего первому радиальному положению конца хода удерживающих элементов 8 и, соответственно, либо минимального, либо максимального размера области А удержания стакана 2, и
- второе изменение направления вращения постоянного магнита 25, вызванное изменением направления колебания колебательного элемента 13, и указывающую на то, что колебательный элемент 13 достиг абсолютного углового положения второго конца хода, напротив первого, соответствующего второму радиальному положению конца хода удерживающих элементов 8 и, следовательно находящегося между минимальным и максимальным размером области А удержания стакана 2,
- определения начального абсолютного углового положения постоянного магнита 25, которое он занимает, когда на электрический привод 9 подается питание, и первое и второе финальные абсолютные угловые положения постоянного магнита 25, соответствующие первому и второму абсолютным угловым положениям конца хода колебательного элемента 13,
- определения диапазона хода или углового перемещения колебательного элемента 13 в ответ на полный оборот колеса 11 на основе, в частности, как абсолютную величину разницы между первым и вторым финальными абсолютными угловыми положениями постоянного магнита 25, соответствующие первому и второму абсолютным угловым положениям конца хода колебательного элемента 13, и
- определения начальной конфигурации держателя 1 стакана, и таким образом, начального размера области А удержания, когда держатель 1 стакана установлен, на основе углового перемещения постоянного магнита 25 от начального абсолютного углового положения до первого финального абсолютного углового положения, соответствующего первому изменению направления колебания колебательного элемента 13, и определенного диапазона хода или углового перемещения колебательного элемента 13.
В другом варианте осуществления вместо подачи питания на электрический привод 9, чтобы колебательный элемент 13 совершил полный ход или угловое перемещение в ответ на полный оборот колеса 11, чтобы он достиг первого и второго абсолютных угловых положений конца хода, на основе чего затем определяется диапазон хода или углового перемещения колебательного элемента 13 в ответ на полный оборот колеса 11, диапазон хода или углового перемещения колебательного элемента 13 можно внести в память электронного блока 24 управления и на электрический привод 9 можно подавать питание только до того момента, как электронный блок 24 управления обнаружит первое изменение направления вращения постоянного магнита 25.
В этом варианте осуществления обнаруживается и определяется только начальное абсолютное угловое положение постоянного магнита 25, которое он занимает, когда на электрический привод 9 подается питание, и первое финальное абсолютное угловое положение постоянного магнита 25, соответствующее первому абсолютному угловому положению конца хода колебательного элемента 13, которое он занимает, когда обнаруживается первое изменение направления колебания; таким образом, начальная конфигурация держателя 1 стакана определяется на основе углового перемещения постоянного магнита 25 из начального абсолютного углового положения в первое финальное абсолютное угловое положение, соответствующее первому изменению направления колебания колебательного элемента 13, и хранящегося в памяти диапазона хода или углового перемещения колебательного элемента.
Электронный блок 24 управления, дополнительно можно запрограммировать для:
- определения количества зубьев шестерни 29, соответствующего согласно шагу, угловому перемещению ближе к одному из постоянного магнита 25 из начального абсолютного углового положения к первому финальному абсолютному угловому положению и
- определения углового перемещения постоянного магнита 25 из его начального абсолютного положения в первое финальное абсолютное угловое положение на основе определенного количества зубьев шестерни 29 и шага между ними.
Наконец, электронный блок 24 управления запрограммирован на регулирование размера области А удержания для адаптации ее под размер используемого стакана 2, на основе начального размер области А удержания, когда держатель 1 стакана устанавливается, и на шаге между зубьями шестерни 29.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСПЕНСЕР СТАКАНОВ ДЛЯ АВТОМАТА ПО ПРОДАЖЕ НАПИТКОВ | 2020 |
|
RU2803484C2 |
| ДИСПЕНСЕР СТАКАНОВ ДЛЯ МАШИНЫ ПО ПРОДАЖЕ НАПИТКОВ | 2020 |
|
RU2816911C1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ КОРПУСА АМПУЛЫ С ПУЧКОМ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2013 |
|
RU2511118C1 |
| Упорный подшипниковый узел механизма выключения сцепления,управляемого вилкой | 1981 |
|
SU1240368A3 |
| БЛОК КОФЕЙНОГО АППАРАТА С КОНТЕЙНЕРОМ ДЛЯ ЗЕРЕН, ДОЗИРУЮЩИМ УСТРОЙСТВОМ И ПОМОЛЬНЫМ УСТРОЙСТВОМ | 2018 |
|
RU2772697C2 |
| ГЕРМЕТИЧНОЕ СОЕДИНИТЕЛЬНОЕ УСТРОЙСТВО ПОВЫШЕННОЙ БЕЗОПАСНОСТИ МЕЖДУ ДВУМЯ ЗАМКНУТЫМИ ОБЪЕМАМИ | 2020 |
|
RU2814511C2 |
| Автоматизированное устройство для проведения непрямого массажа сердца при СЛР и его опорная конструкция | 2023 |
|
RU2818452C1 |
| РЕВОЛЬВЕРНАЯ ГОЛОВКА | 2007 |
|
RU2345869C1 |
| КУХОННЫЙ ПРИБОР И ЕМКОСТЬ ДЛЯ ОБРАБОТКИ С СОЕДИНИТЕЛЬНЫМ УСТРОЙСТВОМ | 2011 |
|
RU2523253C1 |
| ФОРМА ДЛЯ РАЗЛИВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА, СОДЕРЖАЩАЯ МЕХАНИЗМ СОЕДИНЕНИЯ ДЛЯ ЗАЩИТНОГО КОЖУХА, ЛИТЕЙНАЯ УСТАНОВКА ДЛЯ РАЗЛИВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА И СПОСОБ РАЗЛИВКИ РАСПЛАВЛЕННОГО МЕТАЛЛА | 2022 |
|
RU2840555C2 |
Держатель (1) стакана, предназначенный для установки в машине для продажи напитков для поддержки индивидуального стакана (2) на станции заполнения и/или на станции выдачи; при этом держатель (1) стакана имеет вертикальную ось (5) и содержит раму (3) и устройство (8) удержания стакана, поддерживаемое рамой (3) и определяющее область (А) удержания стакана, предназначенную для размещения стакана (2), когда стакан (2) поддерживается устройством удержания стакана; держатель (1) стакана дополнительно содержит электрический привод (9), кинематически соединенный с устройством (8) удержания стакана для перемещения устройства (8) удержания стакана и адаптации размера области (А) удержания стакана к размеру стакана (2) и установленный на раме (3) посредством устройства (35) быстрого зацепления/расцепления, выполненного с возможностью обеспечения быстрой и легкой установки и снятия электрического привода (9) несколькими простыми операциями на/с держатель/держателя (1) стакана. Технический результат заключается в упрощении очистки держателя стаканов и надежном удержании стаканов разного размера. 3 н. и 28 з.п. ф-лы, 9 ил.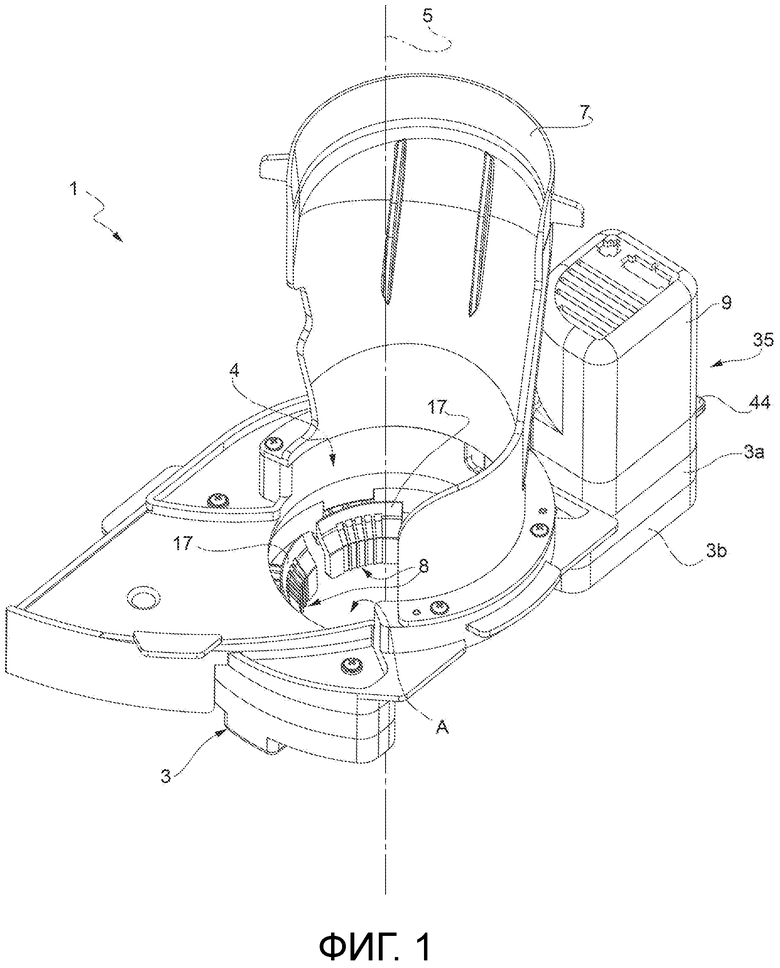
1. Держатель (1) стакана, предназначенный для установки в машине для продажи напитков для поддержки индивидуального стакана (2) на станции заполнения и/или на станции выдачи; при этом держатель (1) стакана имеет вертикальную ось (5) и содержит корпус (3) и устройство (8) удержания стакана, поддерживаемое корпусом (3) и определяющее область (А) удержания стакана, предназначенную для размещения стакана (2), когда стакан (2) поддерживается устройством удержания стакана; держатель (1) стакана дополнительно содержит электрический привод (9), кинематически соединенный с устройством (8) удержания стакана посредством трансмиссии (10) для приведения в действие устройства (8) удержания стакана с целью адаптации размера области (А) удержания стакана к размеру стакана (2), отличающийся тем, что трансмиссия (10) расположена внутри корпуса (3) и содержит силовой вход (32), выступающий наружу из корпуса (3), и тем, что электрический привод (9) содержит силовой выход (9a) и установлен на корпусе (3) посредством устройства (35) быстрого зацепления/расцепления, предназначенного для обеспечения соединения и разъединения друг с другом силового входа (32) и силового выхода (9a) для быстрой и легкой установки и снятия электрического привода (9) на/с корпус(а) (3) несколькими простыми операциями.
2. Держатель по п. 1, в котором трансмиссия (10) предназначена для преобразования вращательного движения, принимаемого от электрического привода (9) через силовой вход (32), в радиальное линейное перемещение относительно оси (5) устройства (8) удержания стакана.
3. Держатель по п. 2, в котором корпус (3) содержит верхний полукожух (3a) и нижний полукожух (3b), соединенные друг с другом; при этом трансмиссия (10) расположена между верхним полукожухом (3a) и нижним полукожухом (3b) и силовой вход (32) расположен на верхнем полукожухе (3a); при этом электрический провод (9) съемно установлен на верхнем полукожухе (3a).
4. Держатель по п. 3, в котором устройство (35) быстрого зацепления/расцепления содержит байонетное соединение (36) и рычажный высвобождающий механизм (37), предназначенный для приведения в действие вручную оператором и перемещения из блокирующей конфигурации, в которой блокируется отсоединение электрического привода (9) от корпуса (3), в высвобождающую конфигурацию, в которой электрический привод (9) выполнен с возможностью перемещения относительно корпуса (3) для расцепления байонетного соединения (36).
5. Держатель по п. 4, в котором байонетное соединение (36) содержит лапку (38), выполненную в нижней стенке электрического привода (9), и канавку (40) в верхнем полукожухе (3a) корпуса (3), имеющую форму для обеспечения пересечения лапкой (38) во время установки и снятия электрического привода (9) для побуждения запирания байонетного соединения (36) и, соответственно, отпирания.
6. Держатель по п. 5, в котором канавка (40) содержит вертикальный сегмент, предназначенный для пересечения лапкой (38) в результате перемещения электрического привода (9) в направлении, параллельном оси (5), и горизонтальный сегмент, предназначенный для пересечения лапкой (38) в результате поворота электрического привода (9) вокруг оси, параллельной оси (5).
7. Держатель по любому из пп. 4-6, в котором рычажный высвобождающий механизм (37) содержит палец (42), установленный с возможностью скольжения через верхнюю стенку (34) верхнего полукожуха (3a) в направлении, параллельном оси (5), и, когда привод (9) установлен на верхнем полукожухе (3a), он выполнен с возможностью зацепления с отверстием (43) в нижней стенке кожуха электрического привода (9); при этом рычажный высвобождающий механизм (37) дополнительно содержит приводной рычаг (44), соответственно соединенный с пальцем (42) для приведения в действие пальца (42) в ответ на ручное воздействие на приводной рычаг (44) оператором.
8. Держатель по п. 7, в котором рычаг (44) установлен с возможностью ручного перемещения из нормального положения покоя, в котором рычаг (44) удерживается в поднятом положении упругим средством и палец (42) выступает из верхней стенки (34) верхнего полукожуха (3a) и выполнен с возможностью зацепления с отверстием (43), в положение высвобождения, в котором рычаг (44) опущен так, что палец (42) не выступает из верхней стенки (34) и высвобождает отверстие (43), в результате чего байонетное соединение (36) обеспечено возможностью расцепления и электрический привод (9) обеспечен возможностью отсоединения.
9. Держатель по любому из предшествующих пунктов, в котором устройство (8) удержания стакана содержит множество удерживающих стакан элементов (8), выполненных с возможностью скольжения в соответствующих радиальных направлениях относительно оси (5) для адаптации размера области (А) удержания стакана к размеру поддерживаемого стакана (2).
10. Держатель по п. 9, в котором трансмиссия (10) содержит кулисный механизм, содержащий колесо (11), выполненное за одно целое и соосно с валом, параллельным указанной оси (5), и образует силовой вход (32) трансмиссии (10), предназначенный для передачи на колесо (11) вращательного движения силового выхода (9a) электрического привода (9); кулисный механизм дополнительно содержит промежуточный элемент (13), расположенный между колесом (11) и удерживающими стакан элементами (8) и обеспеченный щелью (21), выполненной с возможностью зацепления с пальцем (20), выполненным за одно целое с колесом (11), для преобразования вращательного движения колеса (11) в возвратно-поступательное перемещение промежуточного элемента (13) относительно указанной оси (5).
11. Держатель по п. 10, в котором промежуточный элемент (13) имеет криволинейную форму, соосную оси (5), проходит в плоскости, перпендикулярной оси (5), и кинематически соединен с удерживающими стакан элементами (8) для преобразования его собственных возвратно-поступательных колебательных движений вокруг оси (5) в одновременное возвратно-поступательное прямолинейное перемещение удерживающих стакан элементов (8) в соответствующих радиальных направлениях.
12. Держатель по п. 11, в котором каждый удерживающий стакан элемент (8) содержит направляющий скользящий блок (15), проходящий в радиальном направлении относительно оси (5), и участок (17) зацепления со стаканом, имеющий форму дуги окружности, который вместе с участками (17) зацепления других удерживающих элементов (8) ограничивает указанную область (А) удержания стакана, при этом промежуточный элемент имеет множество щелей (18), каждая из которых выполнена с возможностью скользящего зацепления с пальцем (19), выполненным на соответствующем направляющем скользящем блоке (15) и предназначенным для преобразования вращательного движения промежуточного элемента (13) в радиальное линейное перемещение соответствующего удерживающего стакан элемента (8).
13. Держатель (1) стакана, предназначенный для установки в машине для продажи напитков для поддержки индивидуального стакана (2) на станции заполнения и/или на станции выдачи; при этом держатель (1) стакана имеет вертикальную ось (5) и содержит устройство (8) удержания стакана, которое определяет область (А) удержания стакана, занимаемую стаканом (2), когда стакан (2) поддерживается устройством (8) удержания стакана, отличающийся тем, что устройство (8) удержания стакана содержит множество удерживающих стакан элементов (8), установленных с возможностью скольжения в соответствующих радиальных направлениях относительно оси (5) для адаптации размера области (А) удержания стакана к размеру поддерживаемого стакана (2).
14. Держатель по п. 13, дополнительно содержащий электрический привод (9) и трансмиссию (10), предназначенную для кинематического соединения электрического привода (9) с удерживающими стакан элементами (8) и преобразования вращательного движения электрического привода (9) в одновременное линейное перемещение удерживающих стакан элементов (8) в соответствующих радиальных направлениях.
15. Держатель по п. 14, в котором трансмиссия содержит кулисный механизм, содержащий колесо (11) с осью (12) вращения, параллельной указанной оси (5), и предназначенное для приема вращательного движения от электрического привода (9), и промежуточный элемент (13), расположенный между колесом (11) и удерживающими стакан элементами (8) и обеспеченный щелью (21), выполненной с возможностью зацепления с пальцем (20), выполненным за одно целое с колесом (11) для преобразования вращательного движения колеса (11) в возвратно-поступательное перемещение промежуточного элемента (13) относительно указанной оси (5).
16. Держатель по п. 15, в котором промежуточный элемент (13) имеет криволинейную форму, соосную оси (5), проходит в плоскости, перпендикулярной оси (5), и кинематически соединен с удерживающими стакан элементами (8) для преобразования собственного возвратно-поступательного колебательного движения вокруг оси (5) в одновременное возвратно-поступательное перемещение удерживающих стакан элементов (8) в соответствующих радиальных направлениях.
17. Держатель по п. 16, в котором каждый удерживающий стакан элемент (8) содержит направляющий скользящий блок (15), проходящий в радиальном направлении относительно оси (5), и участок (17) зацепления со стаканом, имеющий форму дуги окружности, который вместе с участками (17) зацепления других удерживающих элементов (8) ограничивает указанную область (А) удержания стакана; при этом промежуточный элемент (13) имеет множество щелей (18), каждая из которых выполнена с возможностью скользящего зацепления с пальцем (19), выполненным на соответствующем направляющем скользящем блоке (15) и предназначенным для преобразования вращательного движения промежуточного элемента (13) в радиальное линейное перемещение соответствующего удерживающего стакан элемента (8).
18. Держатель по любому из пп. 14-17, содержащий корпус (3) для поддержки удерживающего стакан устройства (8), трансмиссию (10) и электрической привод (9); при этом держатель (1) стакана дополнительно содержит устройство (35) быстрого зацепления/расцепления, предназначенное для обеспечения легкой и быстрой установки и снятия электрического привода (9) несколькими простыми операциями на/с остальную(ой) часть(и) держателя (1) стакана.
19. Держатель по п. 18, в котором трансмиссия (10) содержит силовой вход (32), соединенный с силовым выходом (9a) электрического привода (9); при этом устройство (35) быстрого зацепления/расцепления предназначено для обеспечения быстрого соединения и разъединения силового входа (32) и силового выхода (9a), когда электрический привод (9) установлен и снят на/с остальную(ой) часть(и) держателя (1) стакана.
20. Держатель по п. 19, в котором корпус (3) содержит верхний полукожух (3a) и нижний полукожух (3b), соединенные друг с другом; при этом трансмиссия (10) расположена между верхним полукожухом (3a) и нижним полукожухом (3b), а силовой вход (32) расположен в верхнем полукожухе (3a); при этом электрический привод (9) съемно установлен на верхнем полукожухе (3a).
21. Держатель по п. 20, в котором устройство (35) быстрого зацепления/расцепления содержит байонетное соединение (36) и рычажный высвобождающий механизм (37), предназначенный для приведения в действие вручную оператором и перемещаемый из конфигурации запирания, в которой блокируется отсоединение электрического привода (9) от корпуса (3), в высвобождающую конфигурацию, в которой электрический привод (9) выполнен с возможностью перемещения относительно корпуса (3) для расцепления байонетного соединения (36).
22. Держатель по п. 21, в котором байонетное соединение (36) содержит лапку (38), выполненную на нижней стенке электрического привода (9), и канавку (40) в верхнем полукожухе (3a) корпуса (3), имеющую форму для обеспечения пересечения лапкой (38) во время установки и снятия электрического привода (9) для побуждения запирания и, соответственно, отпирания байонетного соединения (36).
23. Держатель по п. 22, в котором канавка (40) содержит вертикальный сегмент, предназначенный для пересечения лапкой (38) в результате перемещения электрического привода (9) в направлении, параллельном оси (5), и горизонтальный сегмент, предназначенный для пересечения лапкой (38) в результате поворота электрического привода (9) вокруг оси, параллельной оси (5).
24. Держатель по любому из пп. 21-23, в котором рычажный высвобождающий механизм (37) содержит палец (42), установленный с возможностью скольжения через верхнюю стенку (34) верхнего полукожуха (3a) в направлении, параллельном оси (5), и, когда привод (9) установлен на верхнем полукожухе (3a), он выполнен с возможностью зацепления с отверстием (43) в нижней стенке кожуха электрического привода (9); при этом рычажный высвобождающий механизм (37) дополнительно содержит приводной рычаг (44), соответственно соединенный с пальцем (42) для приведения в действие пальца (42) в ответ на ручное воздействие оператора на рычаг (44).
25. Держатель по п. 24, в котором рычаг (44) установлен с возможностью ручного перемещения из нормального положения покоя, в котором рычаг (44) удерживается в поднятом положении упругим средством и палец (42) выступает их верхней стенки (34) верхнего полукожуха (3a) и выполнен с возможностью зацепления с отверстием (43), в положение отпирания, в котором рычаг (44) опущен так, что палец (42) не выступает из верхней стенки (34) и высвобождает отверстие (43), в результате чего байонетное соединение (36) обеспечено возможностью расцепления и электрический привод обеспечен возможностью отсоединения.
26. Держатель (1) по любому из пп. 13-25, в котором удерживающие стакан элементы (8) приводятся в действие электрическим приводом (9) для скольжения в указанных соответствующих радиальных направлениях;
держатель (1) стакана дополнительно содержит трансмиссию (10), кинематически соединяющую электрический привод (9) с удерживающим стакан устройством (8) и содержащую колебательный элемент (13), соосный оси (5) и соединенный с электрическим приводом (9) кинематической связью, предназначенной для преобразования вращательного движения, принимаемого от электрического привода (9), в возвратно-поступательное колебательное движение колебательного элемента (13) вокруг оси (5), и соединенный с удерживающими стакан элементами (8) кинематической связью, предназначенной для преобразования возвратно-поступательного колебательного движения колебательного элемента (13) в одновременное возвратно-поступательное прямолинейное перемещение удерживающих стакан элементов (8) в соответствующих радиальных направлениях;
при этом держатель (1) стакана дополнительно содержит электронную систему (22) управления для управления перемещением удерживающих стакан элементов (8) и, следовательно, размером области (А) удержания стакана;
при этом электронная система (22) управления содержит:
сенсорную систему (23), установленную и выполненную с возможностью генерирования электрических выходных сигналов, обеспечивающих определение размера области (А) удержания стакана; и
электронный блок (24) управления, электрически соединенный с сенсорной системой (23) для приема электрических выходных сигналов и с электрическим приводом (9) для передачи на него электрических управляющих сигналов и запрограммированный для управления на основе электрических выходных сигналов сенсорной системы (23) электрическим приводом (9) для адаптации размера области (А) удержания стакана к размерам стакана (2), поддерживаемого подвижными удерживающими стакан элементами (8);
сенсорная система (23) содержит устройство (53) магнитного датчика углового положения, установленное и предназначенное для обеспечения электрических выходных сигналов, указывающих на абсолютное угловое положение колебательного элемента (13) и, следовательно, на абсолютное радиальное положение удерживающих стакан элементов (8);
при этом устройство (53) магнитного датчика углового положения содержит:
- постоянный магнит (25) с осевой намагниченностью с осью (А) намагниченности и установленный с возможностью вращения вокруг оси (В) вращения, перпендикулярной оси (А) намагниченности постоянного магнита (25), в ответ на вращение колебательного элемента (13); и
- магнитный датчик (26) углового положения, расположенный в фиксированном положении рядом с постоянным магнитом (25) для обеспечения электрических выходных сигналов, указывающих на угловое положение магнитного поля, генерируемого постоянным магнитом (25).
27. Держатель по п. 26, в котором магнит (25) является цилиндрическим магнитом, выполненным на валу (28) шестерни (29), установленной для вращения вокруг оси (В) вращения, которая параллельна оси (5), и выполненной с возможностью зацепления с зубчатым сектором (30), образованным вдоль края колебательного элемента (13).
28. Держатель по п. 27, в котором электронный блок (24) управления дополнительно запрограммирован для определения начальной конфигурации держателя (1) стакана, определенной начальным размером области (А) удержания стакана, когда держатель (1) стакана установлен.
29. Держатель по п. 28, в котором для определения начальной конфигурации держателя (1) стакана электронный блок (24) управления дополнительно запрограммирован для:
- определения на основе электрических выходных сигналов магнитного датчика (26) углового положения текущего абсолютного углового положения магнита (25);
- подачи питания на электрический привод (9) до момента, когда на основе текущего абсолютного углового положения магнита (25), электронный блок (24) управления обнаружит:
первое изменение направления вращения магнита (25), которое вызвано изменением направления колебаний колебательного элемента (13) и указывает, что колебательный элемент (13) достиг первого абсолютного углового положения конца хода, которому соответствует первое радиальное положение конца хода удерживающих элементов (8) и, следовательно, либо минимальный, либо максимальный размер области (А) удержания стакана (2);
второе изменение направления вращения постоянного магнита (25), вызванное изменением направления колебания колебательного элемента (13) и указывающее на то, что колебательный элемент (13) достиг абсолютного углового положения второго конца хода, напротив первого, соответствующего второму радиальному положению конца хода удерживающих элементов (8) и, следовательно, находящегося между минимальным и максимальным размером области (А) удержания стакана (2);
- определения начального абсолютного углового положения постоянного магнита (25), которое он занимает, когда на электрический привод (9) подается питание, и первого и второго абсолютных угловых положений постоянного магнита (25), соответствующих первому и второму абсолютным угловым положениям конца хода колебательного элемента (13);
- определения диапазона перемещения или углового хода колебательного элемента (13) в ответ на полный оборот колеса (11) на основе разницы между первым и вторым абсолютными угловыми положениями постоянного магнита (25), соответствующими первому и второму абсолютным угловым положениям конца хода колебательного элемента (13); и
- определения начальной конфигурации держателя (1) стакана на основе углового перемещения магнита (25) из начального абсолютного углового положения в первое финальное абсолютное угловое положение, соответствующее первому абсолютному угловому положению конца хода колебательного элемента (13) и определенному диапазону перемещения или углового хода колебательного элемента (13).
30. Держатель по п. 28, в котором для определения начальной конфигурации держателя (1) стакана электронный блок (24) управления дополнительно запрограммирован для:
- хранения диапазона перемещения или углового хода колебательного элемента (13) в ответ на полный оборот колеса (11);
- определения на основе электрических выходных сигналов магнитного датчика (26) углового положения текущего абсолютного углового положения магнита (25);
- подачи питания на электрический привод (9) до момента, когда на основе текущего абсолютного углового положения магнита (25) электронный блок (24) управления обнаружит:
первое изменение направления вращения магнита (25), которое вызвано изменением направления колебания колебательного элемента (13) и указывает, что колебательный элемент (13) достиг первого абсолютного углового положения конца хода, которому соответствует первое радиальное положение конца хода удерживающих стакан элементов (8) и, следовательно, либо минимальный, либо максимальный размер области (А) удержания стакана (2);
- определения начального абсолютного углового положения магнита (25), которое он занимает, когда на электрический привод (9) подается электропитание, и первого абсолютного углового положения магнита (25), соответствующего первому абсолютному угловому положению конца хода колебательного элемента (13); и
- определения начальной конфигурации держателя (1) стакана на основе углового перемещения магнита (25) из начального абсолютного углового положения в первое финальное абсолютное угловое положение, соответствующее первому абсолютному угловому положению конца хода колебательного элемента (13) и хранящемуся в памяти диапазону перемещения или углового хода колебательного элемента (13).
31. Машина для продажи напитков, содержащая диспенсер стаканов, предназначенный для выдачи индивидуальных стаканов (2), и держатель (1) стакана по любому из предшествующих пунктов.
| RU 2018136256 A, 16.04.2020 | |||
| Двухшпиндельный вертикально-сверлильный станок-автомат для фрезерования гнезд в деревянных деталях | 1950 |
|
SU92407A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СОЗДАНИЯ РЕЦЕПТА НАПИТКА ДЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ДЛЯ ДОЗИРОВАНИЯ И ПЕРЕМЕШИВАНИЯ/СМЕШИВАНИЯ ИНГРЕДИЕНТОВ НАПИТКА | 2009 |
|
RU2501076C2 |
| US 3120324 A1, 04.02.1964 | |||
| WO 2017158555 A1, 21.09.2017 | |||
| JP 2001184560 A, 06.07.2001 | |||
| DE 3368137 D1, 15.01.1987. | |||

