Ссылка на родственную заявку
[0001] Согласно настоящей заявке испрашивается приоритет в соответствии с предварительной заявкой на выдачу патента США №62/752,042, поданной 29 октября 2018 года, содержание которой полностью включено посредством ссылки в настоящий документ.
Область техники, к которой относится настоящее изобретение
[0002] Настоящая заявка относится к системе и способу, которые облегчают укупоривание крышкой контейнера и удаление крышки с контейнера. В частности, настоящая патентная заявка относится к физическому закреплению контейнеров, что позволяет обеспечить удаление и/или замену крышки контейнера, которая закрепляется и удаляется с контейнера с помощью вращения.
Предшествующий уровень техники настоящего изобретения
[0003] Контейнеры для образцов используются в лабораторных условиях для хранения и транспортировки испытуемых образцов. Контейнеры для образцов бывают разных размеров в зависимости от характеристик или количества образца, который необходимо хранить или транспортировать. Отраслевые стандарты также могут определять тип контейнера, который будет использоваться для транспортировки конкретного образца. Контейнеры с образцами различных размеров могут быть доставлены в лабораторию для испытания образцов. Контейнеры обычно закрываются навинчивающейся крышкой контейнера. Следовательно, испытание образцов обычно является длительным и трудоемким процессом, требующим снятия крышки, извлечения образца из контейнера и повторной установки крышки.
[0004] В данной области известны многочисленные автоматизированные системы для укупоривания крышкой контейнеров с лабораторными образцами и удаления крышки с контейнеров с лабораторными образцами. В этих системах обычно используются вращающиеся узлы, которые захватывают корпус контейнера либо крышку контейнера, либо оба вместе. Захватывающий механизм должен иметь возможность захватывать элемент (т.е. один из крышки или корпуса контейнера), который должен вращаться с достаточной силой, чтобы обеспечить возможность приложить эффективную величину крутящего момента для надежной фиксации или эффективного снятия крышки с контейнера. Механизм также должен иметь возможность расцепления для освобождения или выталкивания элемента после завершения процедуры укупоривания крышкой/удаления крышки. Патент США No. 1,249,025 описывает устройство для навинчивания крышек на бутылки. Патент США No. 6,205,888 описывает устройство, которое удерживает крышки с защитой от детей для открытия контейнеров, закрытых с помощью навинчиваемых средств.
[0005] Эти системы для укупоривания крышкой/удаления крышки могут требовать зажима или ограничения корпуса контейнера с образцами во время операции укупоривания крышкой и удаления крышки, чтобы предотвратить вращение контейнера при приложении крутящего момента к крышке с помощью узла соединительной муфты во время процесса укупоривания крышкой/удаления крышки. В системах для зажима предшествующего уровня техники использовались механические системы, которые соединяют/разъединяют контейнер в ответ на некоторое внешнее механическое воздействие (электрическое, пневматическое, гидравлическое и т.д.). Этот тип системы для зажима позволяет удерживать контейнер с образцами при приложении крутящего момента к соответствующей крышке и освобождать, чтобы обеспечить беспрепятственное введение, выталкивание и извлечение контейнера из системы для зажима. Однако эти системы нуждаются в электрической, пневматической или гидравлической подсистеме и связанной с ней системе управления, которая либо синхронизирована с системой для укупоривания крышкой/удаления крышки, либо выполнена с возможностью обнаружения и реагирования на положение или близость узла соединительной муфты устройства для укупоривания крышкой/удаления крышки. Это привело бы к дополнительной сложности и стоимости автоматизированной системы для укупоривания крышкой/удаления крышки.
[0006] Следовательно, существует потребность в механически надежной самосрабатывающей системе и способе ограничения контейнера с образцами, которая подходит для использования с автоматизированными системами для укупоривания крышкой/удаления крышки.
Краткое раскрытие настоящего изобретения
[0007] В настоящем документе описаны система и способ для самосрабатывающего механически смещенного ограничения контейнера. Система не требует компьютерного управления или регламентирования по времени, а также не требует какого-либо внешнего источника энергии, кроме силы, прикладываемой при вставке контейнера в ограничитель. Система основана на узле, включающем один или несколько механически смещенных поворотных рычагов, каждый из которых характеризуется наличием горизонтального элемента или плеча и вертикального элемента или плеча, каждый из которых проходит от оси поворота. Термины «горизонтальный» и «вертикальный» используются в настоящем документе для описания ориентации плеч рычага относительно друг друга, а не относительно другой поверхности. Вертикальное плечо рычага проходит вверх от оси поворота, а горизонтальное плечо проходит приблизительно в боковом направлении от оси поворота. Другими словами, плечи рычага почти ортогональны друг другу относительно оси поворота. Специалист средней квалификации в данной области техники поймет, что относительные углы элементов или рычагов могут быть меньше или больше девяноста градусов, поскольку рычаги и их относительная ориентация служат для фиксации и освобождения контейнера совместно с механизмом или другими средствами (т.е. ручное управление), который используется для снятия крышки с контейнера и ее фиксации на контейнере. Рычаг (рычаги) расположен у основания канала в корпусе.
[0008] Канал выполнен с возможностью приема закрытого крышкой контейнера. Все приведение в действие происходит, когда основание вставленного контейнера входит в контакт с верхней поверхностью горизонтальных элементов одного или нескольких поворотных рычагов, расположенных у основания канала, выполненного с возможностью использования в качестве направляющей для вставленной трубки. Рычаг (рычаги) смещаются в этом поворотном поднятом положении с помощью механических средств, таких как пружина. Когда вставленная трубка прижимает горизонтальные элементы вниз, верхние части вертикальных элементов поворачиваются внутрь к внешней стороне контейнера. Фрикционная накладка, расположенная на внутренней поверхности каждого вертикального элемента, приведена в контакт с внешней стороной контейнера, тем самым захватывая его. Это действие захватывания удерживает контейнер с достаточным трением, чтобы можно было обеспечить снятие или прикрепление навинчивающейся крышки. Согласно варианту осуществления настоящего изобретения, в котором имеется только один рычаг, фрикционная накладка расположена на поверхности канала, противоположной вертикальному плечу рычага, на котором расположена фрикционная накладка.
[0009] Согласно другим вариантам осуществления настоящее изобретение включает механически смещаемую платформу, поддерживающую канал и поворотные рычаги. Это основание смещено и расположено так, чтобы обеспечить возможность каналу и узлу поворотного рычага перемещаться вниз, преодолевая силу, смещающую платформу, и перемещаться через корпус ограничителя контейнера. Это дальнейшее продвижение контейнера, канала и узла рычага принуждает поворотные рычаги принимать полностью зацепленные положения захватывания и переводит вертикальные элементы рычагов (и гибкие фрикционные накладки на них) в полностью вертикальные положения. В этом положении фрикционные накладки прикладывают максимальную силу трения покоя к внешней стороне контейнера. Согласно другому варианту осуществления настоящего изобретения канал в корпусе принимает втулку, и втулка продвигается вниз в канале, поскольку механически смещенная платформа отталкивается от дна корпуса под воздействием направленной вниз силы, приложенной контейнером к рычагу (рычагам), расположенному в нижней части канала.
[0010] Согласно одному варианту осуществления настоящего изобретения устройство для механического ограничения контейнера, выполненного с возможностью приема крышки, включает узел, включающий корпус или блок, характеризующийся наличием в нем канала. Согласно одному варианту осуществления настоящего изобретения канал характеризуется наличием расположенной в нем подвижной втулки. Канал принимает контейнер со своего проксимального конца в блоке. Канал характеризуется такой длиной, что часть контейнера, которая принимает крышку, не входит в канал. Устройство также включает по меньшей мере один рычаг, расположенный в непосредственной близости к дистальному концу канала в блоке. По меньшей мере один рычаг прикреплен к блоку с возможностью поворота. Рычаг характеризуется наличием первой части, которая проходит по существу радиально относительно канала, и второй части, которая проходит по существу аксиально относительно канала. Первая и вторая части рычага вращаются относительно оси, определяемой креплением с возможностью поворота рычага к блоку.
[0011] Согласно одному варианту осуществления настоящего изобретения устройство также включает первое механическое смещение, соединенное с подвижной нижней пластиной, так что подвижная нижняя пластина смещена так, чтобы опираться непосредственно на дистальный конец блока с первой смещающей силой. Согласно тому же или другому варианту осуществления настоящего изобретения устройство также включает второе механическое смещение, выполненное с возможностью позиционирования по меньшей мере одного рычага со второй смещающей силой, которая вынуждает по существу радиальную часть по меньшей мере одного рычага проходить внутрь и вверх в канал, а по существу аксиальную часть по меньшей мере одного рычага -проходить вверх и наружу относительно оси канала. Согласно варианту осуществления настоящего изобретения, в котором устройство включает обе характеристики механического смещения, первая смещающая сила превышает вторую смещающую силу. В ответ на направленную вниз силу, действующую на контейнер или со стороны контейнера в канале, которая превышает вторую смещающую силу второго механического смещения, второе механическое смещение преодолевается, и рычаг поворачивается на проксимальном конце по существу радиальной части и по существу аксиальных частей рычага таким образом, что дистальный конец по существу радиальной части сдвинут вниз в ответ на направленную вниз силу, действующую на контейнер, принимаемый каналом, а дистальный конец по существу аксиальной части сдвинут к контейнеру в канале и далее туда, где, когда направленная вниз сила превышает первую смещающую силу, подвижная нижняя пластина выдвигается из контакта с блоком, позволяя контейнеру продвигаться дальше в канал, тем самым дополнительно продвигая дистальный конец по существу радиальной части рычага ниже, а дистальный конец по существу аксиальной части рычага дальше внутрь, так что дистальный конец аксиальной части контактирует с контейнером с силой трения покоя (Fs).
[0012] Согласно одному варианту осуществления настоящего изобретения первое и второе механические смещения обеспечиваются пружинами. Одним из примеров контейнера является трубка для образцов. Такие контейнеры часто имеют резьбу для установки навинчивающейся крышки. Согласно другому варианту осуществления настоящего изобретения устройство характеризуется наличием двух рычагов, причем первый рычаг прикреплен с возможностью поворота к блоку на одной стороне канала, а второй рычаг прикреплен с возможностью поворота к блоку на противоположной стороне канала. Каждый рычаг также включает анкер. С каждым анкером соединено второе механическое смещение. Устройство также характеризуется наличием одного или нескольких направляющих штифтов, соединенных с подвижной нижней пластиной, причем каждый направляющий штифт расположен в направляющем канале, сформированном в блоке.
[0013] Согласно варианту осуществления настоящего изобретения, в котором канал характеризуется наличием внутри подвижной втулки, втулка характеризуется наличием фланца с внешним периметром, выходящим за периметр отверстия в блоке, который принимает втулку. Втулка подвижна внутри блока, а фланец предотвращает продвижение втулки за проксимальный конец блока. Втулка продвигается дальше в отверстие блока, когда направленная вниз сила превышает второе механическое смещение, потому что втулка продвигается вместе с подвижной нижней пластиной, когда пластина сдвинута от контакта с блоком из-за направленной вниз силы, превышающей первое механическое смещение. Первое механическое смещение также соединено с блоком. По меньшей мере один рычаг дополнительно включает анкер, к которому прикреплено второе механическое смещение. По существу аксиальная часть рычага имеет прикрепленную к ней фрикционную накладку, а фрикционная накладка выдвинута в контакт с контейнером с силой трения покоя (Fs).
[0014] В настоящем документе также описан способ механического ограничения контейнера с помощью устройства. Согласно способу конец контейнера без крышки вставлен в проксимальный конец втулки, характеризующейся наличием внутри канала. Контейнер продвигается в канал с силой, равной или большей, чем первая смещающая сила, чтобы привести конец контейнера без крышки в контакт с дистальным концом по существу радиальной части рычага, тем самым принуждая рычаг поворачиваться. Направленная вниз сила также сдвигает обращенную внутрь поверхность по существу аксиальной части рычага в контакт с концом контейнера без крышки.
Краткое описание фигур
[0015] Признаки, аспекты и преимущества настоящего изобретения станут более понятными с учетом следующего описания, прилагаемой формулы изобретения и сопроводительных фигур, на которых:
[0016] Фиг. 1А представляет собой вид в перспективе системы для укупоривания крышкой/удаления крышки согласно одному варианту осуществления настоящего изобретения.
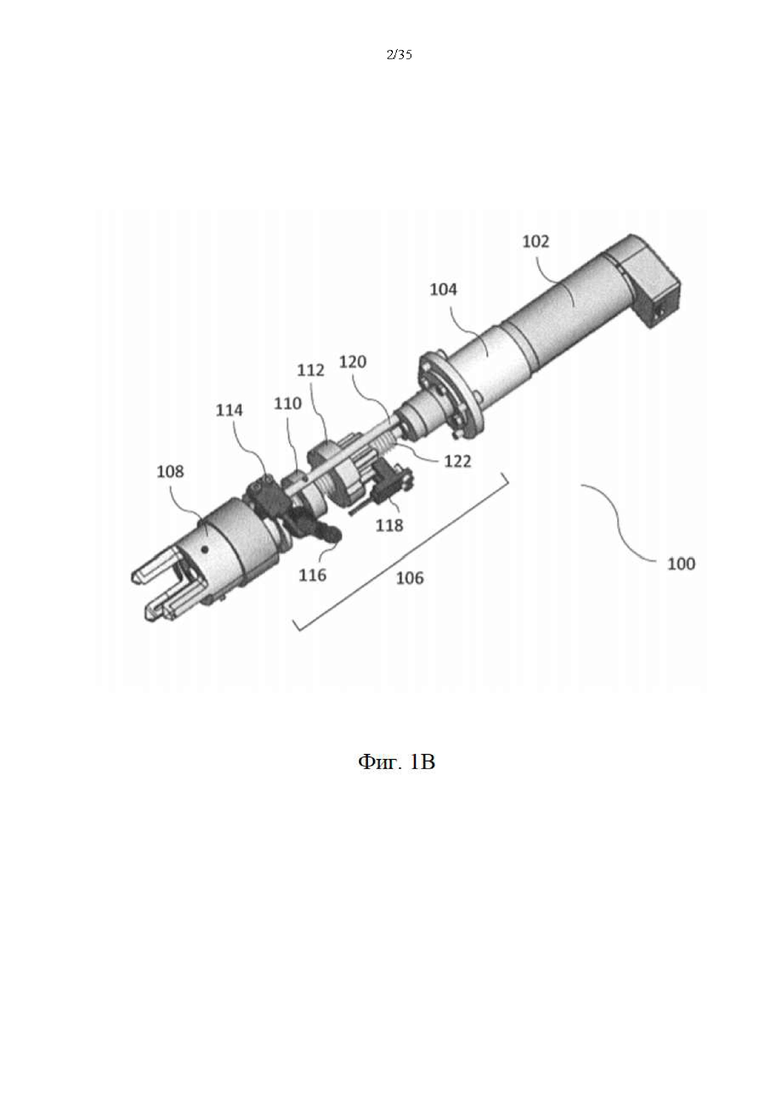
[0017] Фиг. 1В представляет собой вид в перспективе системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1А, изображающий элементы приводного механизма.
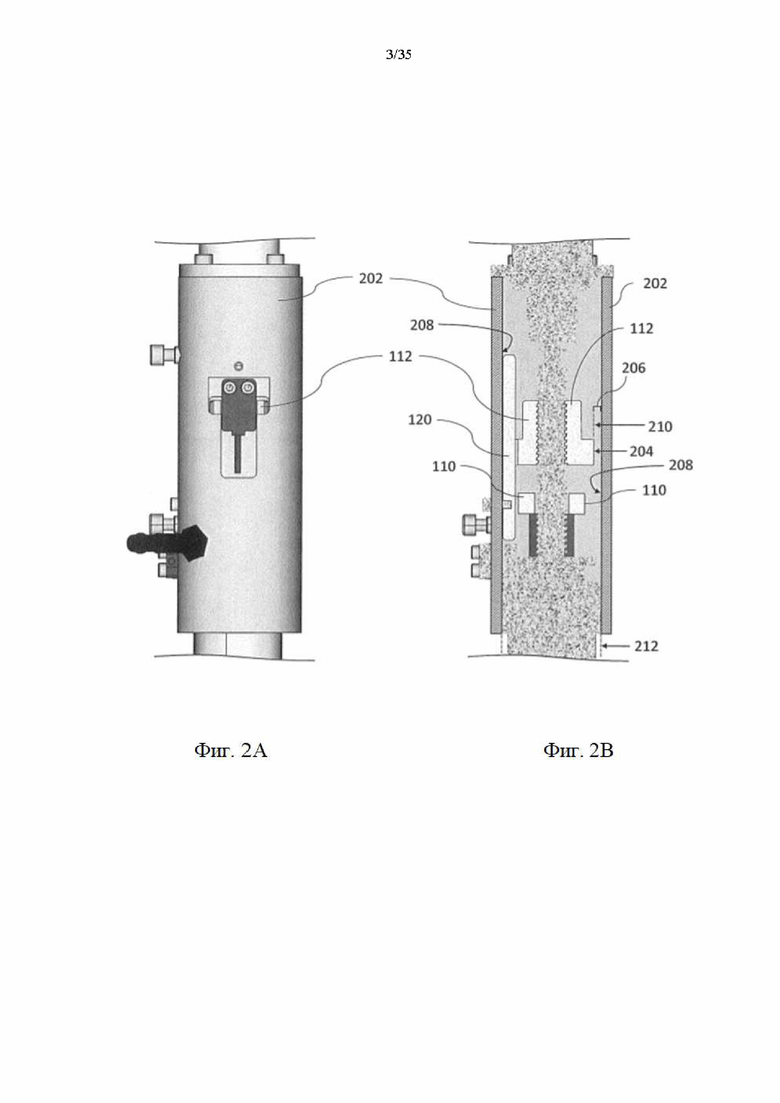
[0018] Фиг. 2А представляет собой вид сбоку приводного механизма системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0019] Фиг. 2В представляет собой вид сбоку с частичным разрезом приводного механизма системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
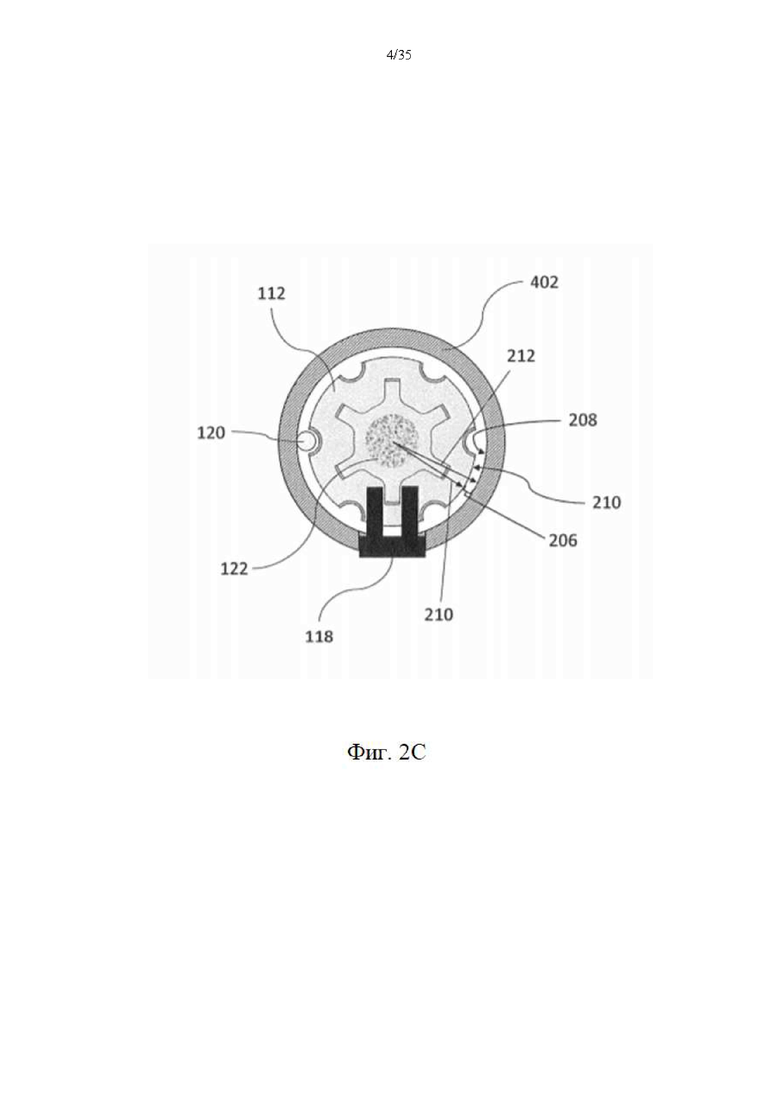
[0020] Фиг. 2С представляет собой вид сверху с частичным разрезом приводного механизма системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
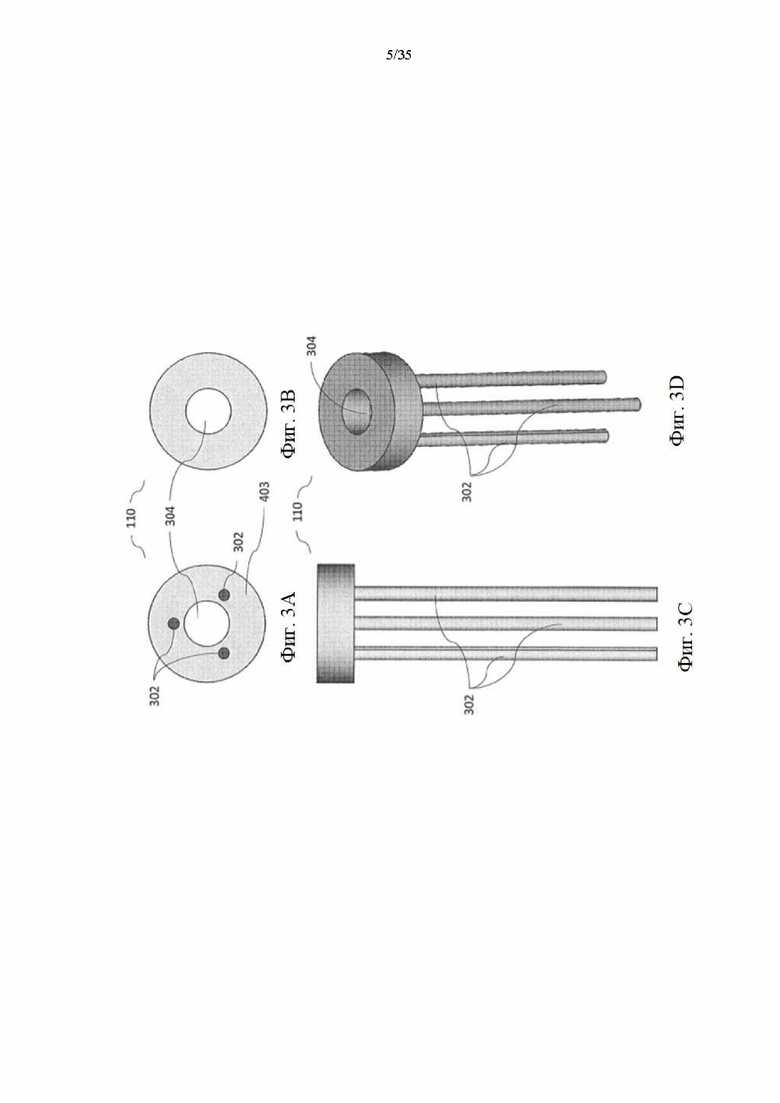
[0021] Фиг. 3А представляет собой вид снизу эжектора системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0022] Фиг. 3В представляет собой вид сверху эжектора системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0023] Фиг. 3С представляет собой вид сбоку эжектора системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0024] Фиг. 3D представляет собой вид в перспективе эжектора системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0025] Фиг. 4 представляет собой вид снизу с частичным разрезом приводного механизма системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0026] Фиг. 5А представляет собой вид в перспективе датчика положения узла соединительной муфты, датчика эжектора и датчика крыльчатки, установленных на приводном механизме, показанном на фиг. 1В.
[0027] Фиг. 5В представляет собой вид в перспективе с частичным разрезом, показывающий датчик положения узла соединительной муфты, показанный на фиг. 5А.
[0028] Фиг. 5С представляет собой вид в перспективе с частичным разрезом, показывающий датчик эжектора, показанный на фиг. 5А.
[0029] Фиг. 5D представляет собой вид в перспективе с частичным разрезом, показывающий датчик крыльчатки, показанный на фиг. 5А.
[0030] Фиг. 6А представляет собой вид сбоку узла соединительной муфты системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0031] Фиг. 6В представляет собой вид спереди узла соединительной муфты системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
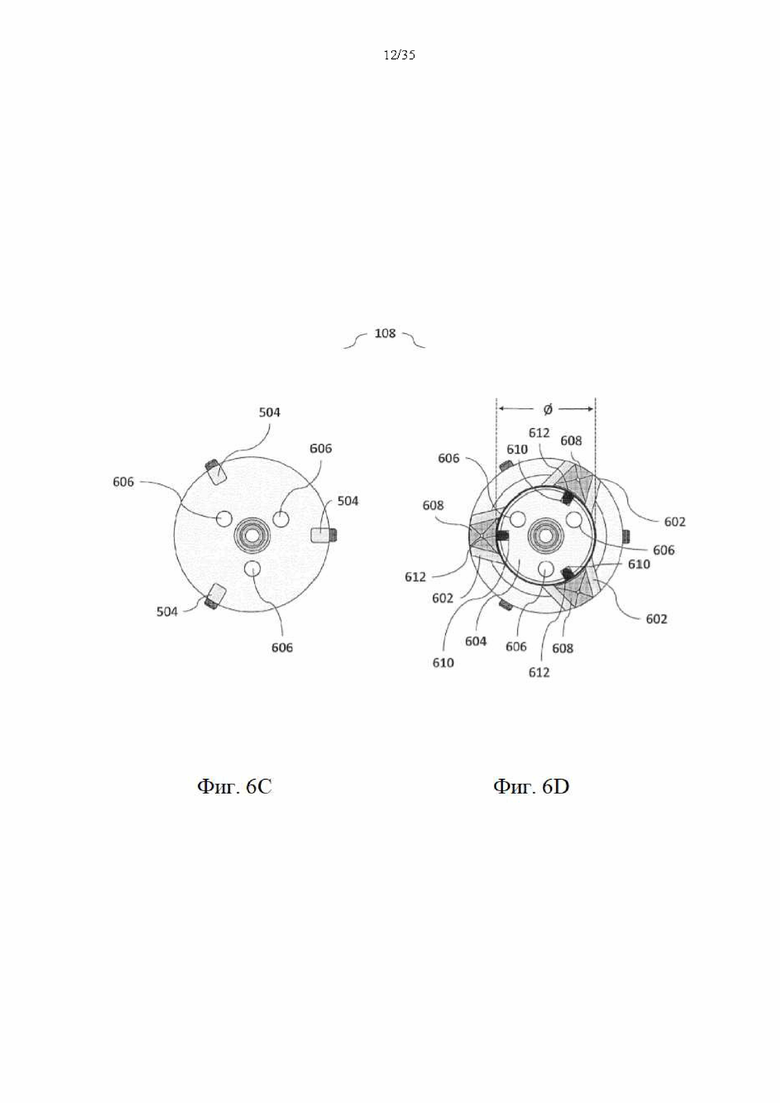
[0032] Фиг. 6С представляет собой вид сверху узла соединительной муфты системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0033] Фиг. 6D представляет собой вид снизу узла соединительной муфты системы для укупоривания крышкой/удаления крышки, показанной на фиг. 1В.
[0034] Фиг. 7А представляет собой вид в перспективе узла соединительной муфты, прикрепленного к крышке.
[0035] Фиг. 7В представляет собой вид в разрезе узла соединительной муфты, иллюстрирующий захватывающие элементы, вложенные в выступы крышки.
[0036] Фиг. 7С представляет собой вид в перспективе иллюстративных крышки и контейнера.
[0037] Фиг. 7D представляет собой вид сверху крышки, показанной на фиг. 7А.
[0038] Фиг. 8А представляет собой вид в поперечном разрезе соединительной муфты, показанной на фиг. 5А.
[0039] Фиг. 8В представляет собой вид в поперечном разрезе соединительной муфты, показанной на фиг. 5А, и крышки и контейнера, показанных на фиг. 7А.
[0040] Фиг. 9 представляет собой вид в перспективе самосрабатывающего механически смещаемого ограничителя контейнера.
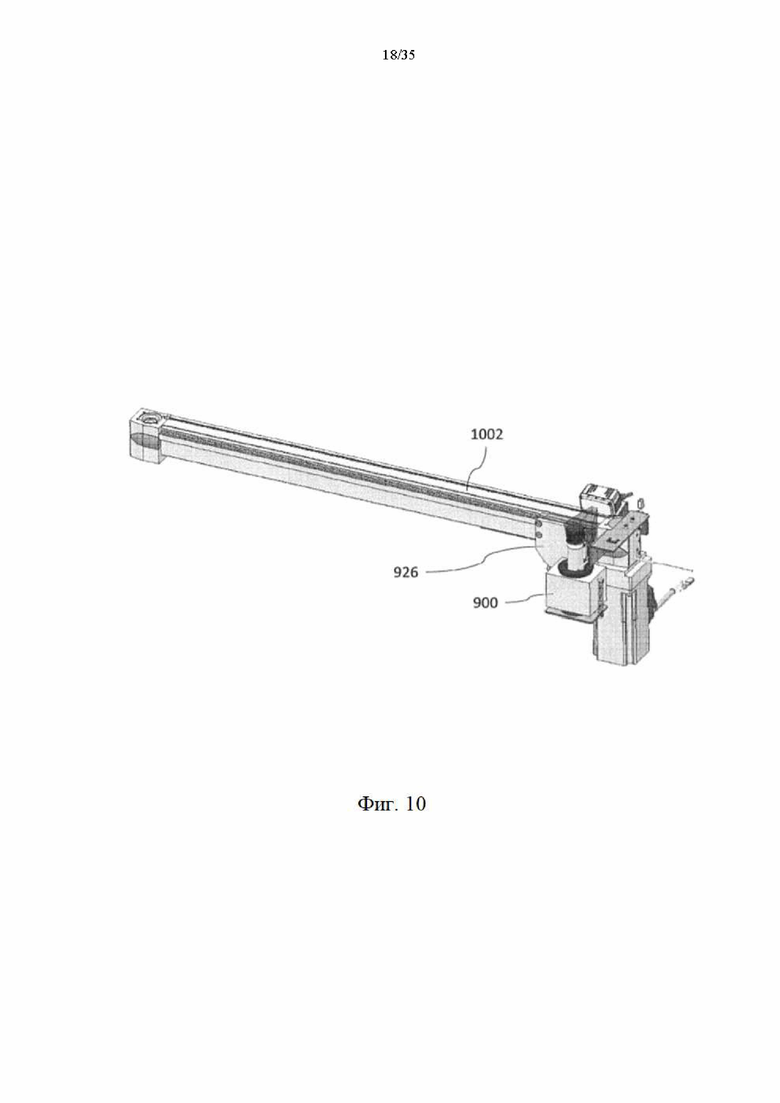
[0041] Фиг. 10 представляет собой вид в перспективе ограничителя контейнера, показанного на фиг. 9, на одноосной роботизированной руке.
[0042] Фиг. 11А представляет собой вид спереди ограничителя контейнера, показанного на фиг. 9.
[0043] Фиг. 11В представляет собой вид сзади ограничителя контейнера, показанного на фиг. 9.
[0044] Фиг. 11С представляет собой вид справа ограничителя контейнера, показанного на фиг. 9.
[0045] Фиг. 11D представляет собой вид слева ограничителя контейнера, показанного на фиг. 9.
[0046] Фиг. 11Е представляет собой вид сверху ограничителя контейнера, показанного на фиг. 9.
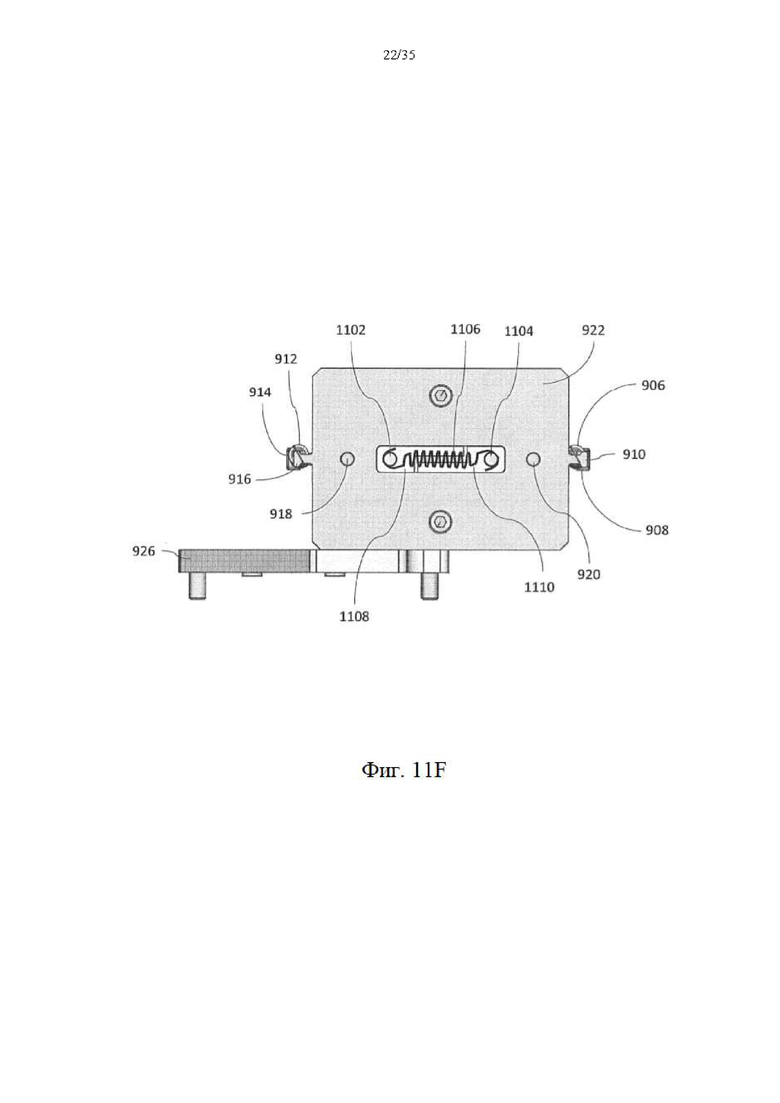
[0047] Фиг. 11F представляет собой вид снизу ограничителя контейнера, показанного на фиг. 9.
[0048] Фиг. 12А представляет собой вид спереди в поперечном разрезе ограничителя контейнера, показанного на фиг. 9, изображающий незагруженное/неактивированное состояние.
[0049] Фиг. 12 В представляет собой вид спереди в поперечном разрезе ограничителя контейнера, показанного на фиг. 9, изображающий частично загруженное/неактивированное/ненажатое состояние.
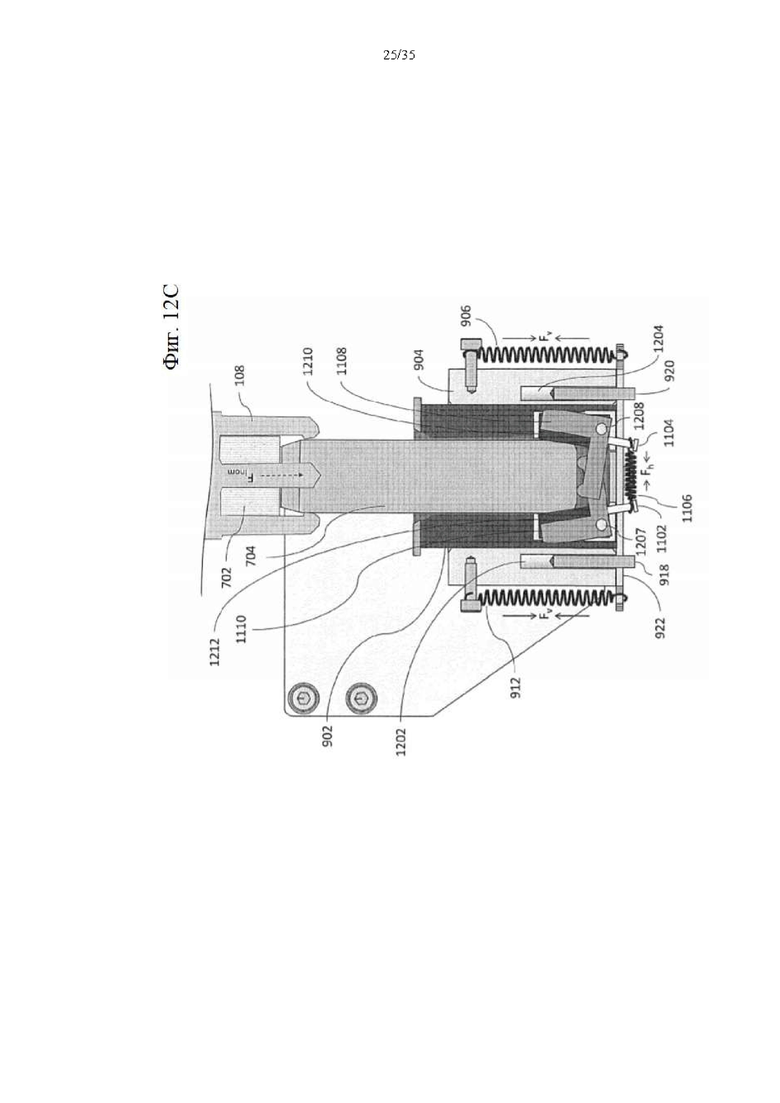
[0050] Фиг. 12С представляет собой вид спереди в поперечном разрезе ограничителя контейнера, показанного на фиг. 9, изображающий загруженное/неактивированное/ненажатое состояние.
[0051] Фиг. 12D представляет собой вид спереди в поперечном разрезе ограничителя контейнера, показанного на фиг. 9, изображающий загруженное/активированное/ненажатое состояние.
[0052] Фиг. 12Е представляет собой вид спереди в поперечном разрезе ограничителя контейнера, показанного на фиг. 9, изображающий загружеиное/активированное/нажатое состояние.
[0053] Фиг. 13А представляет собой вид сверху с частичным разрезом рычагов, штифтов и платформы ограничителя контейнера, показанного на фиг. 9, в состоянии приема контейнера.
[0054] Фиг. 13В представляет собой вид сверху с частичным разрезом рычагов, штифтов и платформы ограничителя контейнера, показанного на фиг. 9, при полном приеме контейнера.
[0055] Фиг. 14А представляет собой вид спереди в поперечном разрезе однорычажного ограничителя контейнера, изображающий незагруженное/неактивированное состояние.
[0056] Фиг. 14В представляет собой вид спереди в поперечном разрезе однорычажного ограничителя контейнера, изображающий частично загруженное/неактивированное/ненажатое состояние.
[0057] Фиг. 14С представляет собой вид спереди в поперечном разрезе однорычажного ограничителя контейнера, изображающий загруженное/неактивированное/ненажатое состояние.
[0058] Фиг. 14D представляет собой вид спереди в поперечном разрезе однорычажного ограничителя контейнера, изображающий загруженное/активированное/ненажатое состояние.
[0059] Фиг. 14Е представляет собой вид спереди в поперечном разрезе однорычажного ограничителя контейнера, изображающий загружеиное/активированное/нажатое состояние.
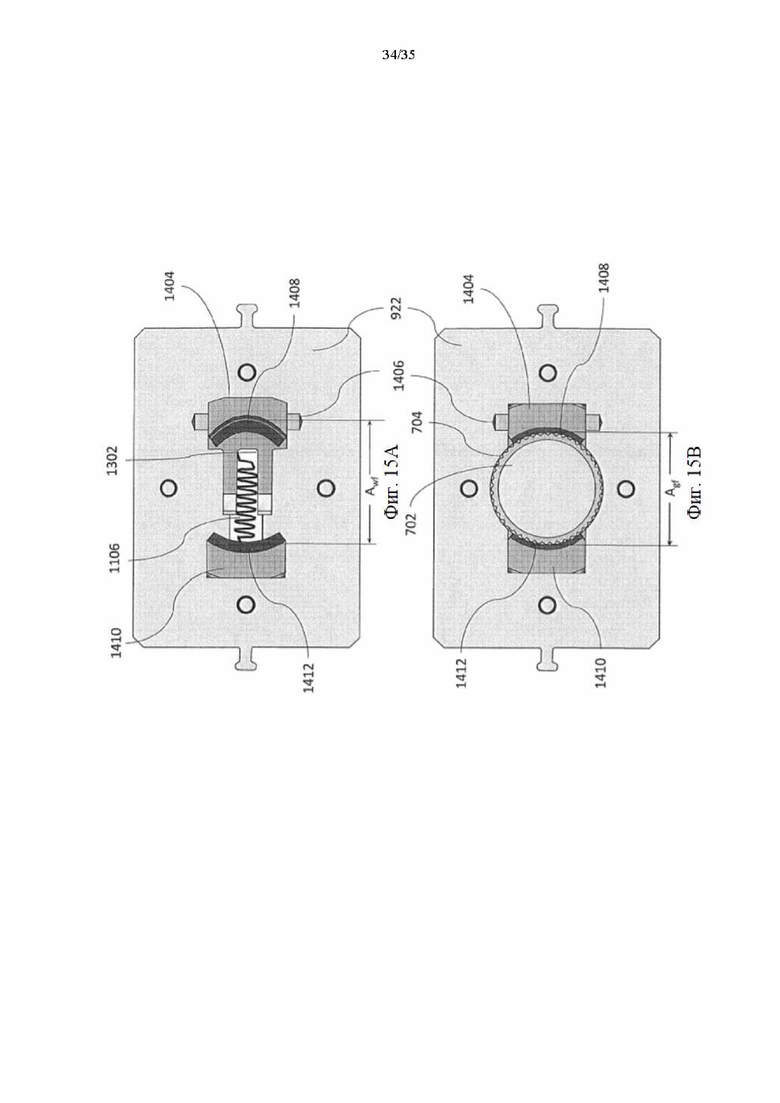
[0060] Фиг. 15А представляет собой вид сверху с частичным разрезом рычага, штифта и платформы однорычажного ограничителя контейнера в состоянии приема контейнера.
[0061] Фиг. 15В собой вид сверху с частичным разрезом рычага, штифта и платформы однорычажного ограничителя контейнера при полном приеме контейнера.
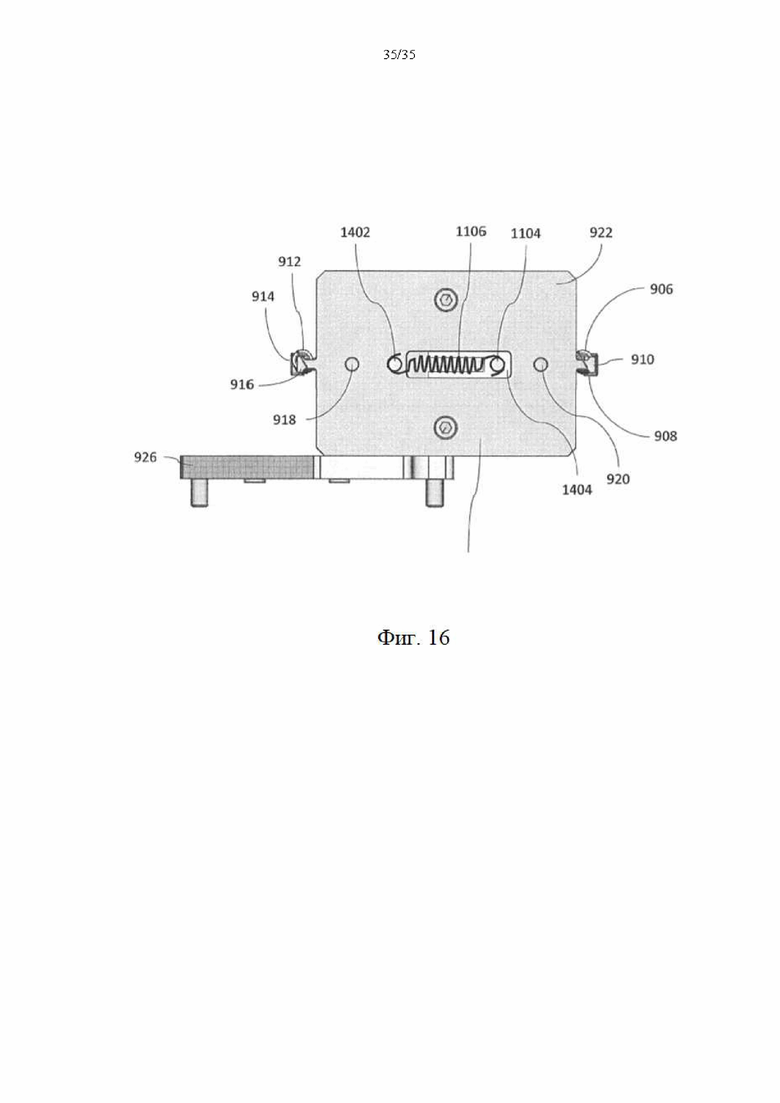
[0062] Фиг. 16 представляет собой вид снизу однорычажного ограничителя контейнера.
Подробное раскрытие настоящего изобретения
[0063] Механически смещенный ограничитель контейнера согласно настоящему изобретению выполнен с возможностью использования в сочетании с автоматизированной системы для укупоривания крышкой/удаления крышки контейнера. Чтобы обеспечить надлежащий контекст для описания ограничителя контейнера, будет предоставлено описание примерной системы для укупоривания крышкой/удаления крышки. Квалифицированный специалист поймет и осознает, что настоящее изобретение можно использовать в сочетании с различными механическими устройствами для укупоривания крышкой/удаления крышки, как автоматическими, так и управляемыми вручную. Настоящее изобретение также может быть использовано для удерживания контейнера, когда крышка снимается вручную.
[0064] Автоматическая система для укупоривания крышкой/удаления крышки
[0065] Одна подобная система, являющаяся предметом предварительной заявки на выдачу патента США №62/659,915, права на которую переданы BD Kiestra B.V. из Драхтена, Нидерланды, предлагает механизм, приводимый в действие одним реверсивным двигателем, соединенным с узлом соединительной муфты через вращающийся резьбовой вал. Узел соединительной муфты выполнен с возможностью зацепления с крышкой через механически смещенные шлицы. В системе используются крыльчатка и эжектор, оба из которых расположены концентрически относительно резьбового вала. Крыльчатка перемещается вдоль вала в зависимости от вращения вала, чтобы обеспечить втягивание эжектора, когда элемент входит в узел соединительной муфты, или обеспечить выдвигание эжектора в узел соединительной муфты, тем самым отсоединяя крышку.
[0066] Как указано на фиг 1А и 1В, двигатель 102 соединен с узлом 106 привода трансмиссией 104, а узел 106 привода находится рядом с узлом 108 соединительной муфты. Узел 106 привода включает эжектор 110, крыльчатку 112, датчик 114 узла соединительной муфты, датчик 116 эжектора, датчик 118 крыльчатки, вал 120 центрирования крыльчатки и приводной резьбовой вал 122.
[0067] На фиг. 2А и 2В показан частичный вид сбоку и частичный вид сбоку с частичным разрезом соответственно приводного механизма 106. Как проиллюстрировано на фиг. 3В, внешняя поверхность 204 крыльчатки 112 должна характеризоваться такими размерами, чтобы создать зазор 206 между ней и внутренней стенкой 208 рамы 202. Это дополнительно проиллюстрировано на фиг. 2С, которая представляет собой вид сверху в поперечном разрезе приводного механизма 106. Как показано, внешний радиус 210 крыльчатки 112 меньше внутреннего радиуса 212 рамы 202. Это создает зазор 206 между крыльчаткой 112 и внутренней стенкой 208, что позволяет крыльчатке 112 поступательно перемещаться вдоль резьбового вала 122 в зависимости от вращения вала (приводимого в движение трансмиссией 104), беспрепятственно со стороны вала 120 центрирования крыльчатки вала.
[0068] На фиг. 3А, 3В, 3С и 3D представлены виды снизу, сверху, сбоку и в перспективе эжектора 110. Эжектор 110, как показано, имеет три удлиненных эжекторных стержня 302, проходящих от нижней поверхности эжектора. Также имеется центральный канал 304 без резьбы.
[0069] Как показано на фиг. 4, внешний радиус 402 резьбового вала 122 меньше внутреннего радиуса 404 канала 304 без резьбы. Это обеспечивает наличие зазора между каналом 304 без резьбы и внешней поверхностью резьбового вала 122. Этот зазор позволяет эжектору 110 поступательно перемещаться вдоль продольной оси резьбового вала 122 без препятствий со стороны этого вала. На фиг. 4 также указано соотношение размеров между валом 120 центрирования крыльчатки и эжектором 110. Внешний радиус эжектора 110 должен быть ограничен размером, который обеспечивает зазор 406 между эжектором 110 и валом 120 центрирования крыльчатки, тем самым обеспечивая возможность поступательного перемещения эжектора 110 вдоль продольной оси резьбового вала 122 без ударного воздействия или иного контакта с валом 120 центрирования крыльчатки.
[0070] Как показано на фиг. 5А, приводной механизм 106 включает три датчика: (i) датчик 114 узла соединительной муфты, (ii) датчик 116 эжектора и (iii) датчик 118 крыльчатки. Согласно конкретному варианту осуществления настоящего изобретения датчик 114 узла соединительной муфты является оптическим вилочным датчиком, установленным на раме 202. Как показано на фиг. 5А, этот датчик расположен так, чтобы определять вращение узла 108 соединительной муфты через прорезанное окно 502. Как показано на фиг. 5В, вращение определяется путем обнаружения радиально равноудаленных проемов 504 в верхней части узла 116 соединительной муфты, когда они проходят между вилками 506 датчика 114 узла соединительной муфты. Датчик 116 эжектора является индуктивным бесконтактным датчиком согласно конкретному варианту осуществления настоящего изобретения. Как показано на фиг. 5С, датчик 116 установлен в раме 202 и расположен так, чтобы определять, когда эжектор 110 поступательно перемещается вдоль продольной оси резьбового вала 122 и приближается к узлу 108 соединительной муфты (положение 110'). Третий датчик, датчик 118 крыльчатки, показанный на фиг. 5А, установлен на раме 202 в прорезанном окне 508. Согласно конкретному варианту осуществления настоящего изобретения датчик 118 крыльчатки представляет собой оптический вилочный датчик того же типа, который был определен для датчика 114 узла соединительной муфты. Как показано на фиг. 5D, датчик 118 крыльчатки расположен внутри приводного механизма, так что, когда крыльчатка 112 находится в самом верхнем положении вдоль резьбового вала 122, лопасть 510 прерывает оптический сигнал между вилками 512. Выходной сигнал каждого датчика передается через интерфейс на систему для укупоривания крышкой/удаления крышки (не изображена). Информация обрабатывается и используется системой контроллера для управления работой устройства для укупоривания крышкой/удаления крышки.
[0071] На фиг. 6А и 6В представлены вид сбоку и вид спереди соответственно узла 108 соединительной муфты, который, как показано, соединен с резьбовым валом 122. Как показано, три пальца 602 выступают из нижней части узла соединительной муфты и расположены на одинаковом расстоянии внутри круглой внутренней секции 604 диаметром ∅. Узел 108 соединительной муфты также характеризуется наличием трех круглых каналов 606 (см. фиг. 6С и 6D). Эти каналы расположены таким образом и имеют такие размеры, чтобы обеспечить трем эжекторным стержням 302 эжектора 110 возможность свободно проходить через них. Согласно предпочтительному варианту осуществления настоящего изобретения каждый из трех пальцев 602 имеет коническое трапециевидное поперечное сечение и оканчивается призматическим четырехугольным наконечником 608. Размещенные внутри камеры 610 внутри каждого пальца 602 находится шлиц 612 зацепления. Как показано на фиг. 6С, шлицы 612 зацепления характеризуются круглым поперечным сечением согласно конкретному варианту осуществления настоящего изобретения. Однако это выбор конструкции, зависящий от конкретных характеристик поверхности элемента, с которым должен сопрягаться шлиц зацепления, и могут быть использованы различные формы поперечного сечения.
[0072] Одним типом приведенного в качестве примера элемента является крышка 702 с внутренней резьбой, показанная на фиг. 7А и 8В. Этот тип крышки аналогичен крышкам, которые обычно используются в контейнерах для лабораторных образцов, таких как 8 мл продукты Phoenix Broth, производимые Becton Dickinson and Company из Франклин Лейкс, штат Нью-Джерси. Крышка 702 навинчивается на контейнер 704 с резьбой. Как показано на фиг. 7А и 7В, боковая поверхность крышки 702 окружена продольными каналами 706, каждый из которых имеет по существу круглое поперечное сечение 708.
[0073] На фиг. 8А представлен вид в поперечном разрезе узла 108 соединительной муфты, зацепляющего крышку 704. Показано, что основание шлица 612 зацепления удерживается вертикальной кромкой 802 внутри призматического четырехугольного наконечника 608 пальца 602. Верхняя часть шлица 612 зацепления смещается цилиндрической пружиной 804, сдвигая верхнюю часть шлица внутрь и от стенки 806 камеры 610. Фиг. 8В представляет собой вид в поперечном разрезе узла 108 соединительной муфты, но с крышкой 702, полностью вставленной между пальцами 602. Как показано, шлиц 612 зацепления надежно сопряжен с продольным каналом 706. Цилиндрическая пружина 804 деформирована наружу верхней частью шлица 612, который отталкивается от стенки 806 камеры 610 вследствие вставки крышки 702. Сопряжение между шлицами 612 зацепления и продольными каналами 706 обеспечивает надежную стыковку, позволяющую приложить значительный крутящий момент к крышке 702 с помощью узла 108 соединительной муфты, в то время как резьбовой вал 122 вращается либо по часовой стрелке, либо против часовой стрелки.
[0074] Как показано на фиг. 8В, крышка 702 надежно входит между пальцами 602 с момента вставки в узел 108 соединительной муфты. Для обеспечения этой надежной посадки и результирующего сопряжения шлицов зацепления узел 108 соединительной муфты должен быть спроектирован с диаметром 0, зависящим от крышки (см. фиг. 6D).
[0075] Самосрабатывающий механически смещаемый ограничитель контейнера
[0076] Фиг. 9 представляет собой вид в перспективе примерного варианта осуществления ограничителя 900 контейнера согласно настоящему изобретению. Втулка 902 контейнера, включая центральную приемную полость контейнера, показана расположенной внутри внешней рамы или блока 904. Вертикальная пружина 906 показана натянутой между верхним пружинным анкером 908 и нижним пружинным анкером 910. Также изображена часть вертикальной пружины 912, расположенная вдоль противоположной стороны внешней рамы 904 от вертикальной пружины 906. Вертикальная пружина 912 натянута между верхним пружинным анкером 914 и нижним пружинным анкером 916 (на этом виде не показано). Направляющие штифты 918 и 920 показаны прикрепленными к платформе 922 и выступающими вверх во внешнюю раму ограничителя 900 контейнера. Основание захватывающего узла 924 показано прикрепленным к платформе 922 и расположено между направляющими штифтами 918 и 920. Кроме того, укупоренный крышкой лабораторный контейнер 704 для образцов показан полностью вставленным и вдавленным в ограничитель 900 контейнера. Крепежный фланец 926 показан прикрепленным к задней стенке внешней рамы 904. Этот крепежный фланец не является существенным для изобретения, а скорее представлен в качестве примера средства, с помощью которого ограничитель контейнера может быть установлен таким образом, чтобы обеспечить возможность поступательного перемещения втулки 902 контейнера и платформы 922 по вертикали относительно внешней рамы 904 во время работы ограничителя контейнера. На фиг. 10 представлен вид в перспективе ограничителя 900 контейнера, установленного с помощью фланца 926 на одноосной роботизированной руке 1002.
[0077] На фиг. 11А, 11В, 11С, 11D, 11Е и 11F изображены соответственно виды спереди, сзади, справа, слева, сверху и снизу ограничителя 900 контейнера. Горизонтальные пружинные анкеры 1102 и 1104 показаны прикрепленными, соответственно к нижней части установленных с возможностью поворота рычагов 1108 и 1110 (фиг. 12А), оба из которых расположены в захватывающем узле 924. Горизонтальная пружина 1106 показана натянутой между горизонтальными пружинными анкерами.
[0078] На фиг. 12А-Е представлены виды в поперечном разрезе ограничителя 900 контейнера. В частности, на фиг. 12А изображен ограничитель контейнера перед вставкой или загрузкой любого контейнера. Вертикальные пружины 906 и 912 служат для смещения платформы 922 к нижней поверхности внешней рамы 904 с силой натягивания 2FV. Направляющие штифты 918 и 920 показаны полностью вставленными в направляющие каналы 1202 и 1204 соответственно. Горизонтальная пружина 1106 показана смещающей горизонтальные пружинные анкеры 1102 и 1104 внутрь с силой Fh. Эта смещающая внутрь сила должна быть достаточно большой, чтобы принудить установленные с возможностью поворота рычаги 1108 и 1110 поворачиваться вокруг штифтов 1207 и 1208 соответственно, и меньше номинальной направленной вниз силы FInom, которая будет приложена к контейнеру автоматической системой во время вставки в ограничитель контейнера и последующего укупоривания крышкой или снятия крышки. Благодаря смещенному повороту рычаги находятся в положении, подходящем для загрузки контейнера. Каждый рычаг характеризуется наличием нижнего горизонтального элемента и верхнего вертикального элемента. В положении загрузки нижний горизонтальный элемент каждого рычага поворачивается так, что кончик каждого из них находится в приподнятом положении внутри центральной полости 1206 втулки 902 контейнера. Следовательно, это вращение помещает верхние вертикальные элементы в положение, в котором верхняя часть каждого из них перемещается наружу от центра полости 1206. Внутренняя поверхность каждого верхнего вертикального элемента характеризуется контуром, соответствующим форме радиального поперечного сечения корпуса того типа контейнера, который должен быть зажат (круглое поперечное сечение согласно этому варианту осуществления настоящего изобретения), а гибкая фрикционная накладка (1210, 1212) прикреплена так, чтобы соответствовать лицевой стороне каждой внутренней поверхности. Эти накладки могут состоять из резины, синтетического полимерного материала или другого подходящего материала, который будет служить для обеспечения суммарной силы трения покоя Fs при зацеплении с внешней стороной контейнера. Эти накладки имеют подходящий размер для обеспечения заданного значения суммарной силы трения покоя.
[0079] На фиг. 12В показан узел 108 соединительной муфты, захватывающий контейнер 704, когда он вставляет контейнер в центральную полость 1206 втулки 902 контейнера. Номинальная сила вставки FInom прилагается узлом 108 соединительной муфты, когда контейнер перемещается вниз в центральную полость 1206. В этой точке процесса вставки контейнер не зацеплен с установленными с возможностью поворота рычагами 1108 и 1110. Вертикальные пружины 906 и 912 остаются в своих исходных положениях покоя. Горизонтальная пружина 1106 поддерживает внутреннюю силу Fh на горизонтальных пружинных анкерах 1102 и 1104, и связанные с ними установленные с возможностью поворота рычаги (1108, 1110) остаются в положении, подходящем для восприятия загрузки контейнера. На фиг. 12С контейнер был приведен в контакт с приподнятым кончиком нижнего горизонтального элемента каждого из установленных с возможностью поворота рычагов (1108, 1110). Контейнер еще необходимо продвинуть в центральную полость до точки, в которой он начинает нажимать на приподнятые кончики горизонтальных элементов рычагов. Как и на фиг. 12А, вертикальные пружины 906 и 912 остаются в своих исходных положениях покоя. Горизонтальная пружина 1106 поддерживает внутреннюю силу Fh на горизонтальных пружинных анкерах 1102 и 1104, и связанные с ними установленные с возможностью поворота рычаги (1108, 1110) остаются в положении, подходящем для восприятия загрузки контейнера.
[0080] На фиг. 12D проиллюстрировано дальнейшее продвижение контейнера 704 в контейнер 902 с помощью узла 108 соединительной муфты. В этот момент сила FInom полностью приложена к приподнятым кончикам горизонтальных элементов рычагов. Эта сила (FInom), превышающая силу Fh, приложенную к горизонтальным пружинным анкерам 1102 и 1104 и связанным с ними установленным с возможностью поворота рычагам (1108, 1110), принуждает горизонтальную пружину 1106 растягиваться или удлиняться по мере того, как приподнятые кончики горизонтальных элементов рычагов прижимаются вниз, а верхняя часть каждого из верхних вертикальных элементов рычагов перемещается внутрь к центру полости 1206. Это движение внутрь приводит к зацеплению и захватыванию гибкими фрикционными накладками (1210, 1212) внешней поверхности контейнера 704.
[0081] Если требуется дополнительная сила захватывания, узел 108 соединительной муфты может быть продвинут дальше по направлению вниз с силой FImax, где FImax больше или равно FInom, и больше 2FV (суммарная смещающая сила, прикладываемая к платформе 922 вертикальными пружинами 906 и 912). Как показано на фиг. 12Е, дополнительная направленная вниз сила FImax приводит к поступательному перемещению вниз во внешнюю раму 904 втулки 902 контейнера, когда вертикальные пружины 906 и 912 растягиваются или удлиняются, а платформа 922 движется вниз. Следует отметить продвижение направляющих штифтов 918 и 920 в каналах 1202 и 1204 из полностью вставленного положения, изображенного на фиг. 12A-D. Это дальнейшее продвижение узла 108 соединительной муфты также приводит к тому, что поворотные рычаги 1108 и 1110 принимают полностью зацепленные положения захватывания, растягивая горизонтальную пружину 1106 и переводя верхние вертикальные элементы рычагов (и гибкие фрикционные накладки 1210 и 1212) в более вертикальное положение (показано как по существу вертикальное положение на фиг. 12Е). В этих положениях фрикционные накладки прикладывают силу трения покоя Fs к внешней стороне контейнера 704.
[0082] Когда контейнер 704 полностью зацеплен фрикционными накладками 1210 и 1212, узел 108 соединительной муфты может быть повернут по часовой стрелке (1214), чтобы укупорить крышкой контейнер, или в направлении против часовой стрелки (1216), чтобы удалить крышку с контейнера. Как обсуждалось ранее, сопряжение между шлицами 612 зацепления в узле 108 соединительной муфты и продольными каналами 706 на крышке контейнера обеспечивает надежную стыковку, позволяющую приложить значительный крутящий момент к крышке 702 с помощью узла 108 соединительной муфты. Максимальный крутящий момент, который должен быть приложен в направление по часовой стрелке (TCmax) или в направлении против часовой стрелки (TDmax) должен быть меньше, чем сила трения покоя (Fs), приложенная к внешней стороне контейнера 704, чтобы избежать соскальзывания корпуса контейнера.
[0083] Способность системы обеспечивать возможность поступательного перемещения втулки 902 контейнера вниз во внешнюю раму 904 дает другие преимущества. Например, автоматические системы для укупоривания крышкой/удаления крышки, такие как описанная выше, передают вертикальное движение на закрепляемый или открепляемый контейнер/крышку. Если бы вертикальное положение контейнера, который укупоривается крышкой/с которого удаляется крышка, оставалось неизменным, автоматизированная система должна была бы постоянно корректировать его положение на протяжении всего процесса укупоривания крышкой/удаления крышки. Это, вероятно, потребует повышения уровня сложности как механической системы, так и системы управления в автоматизированной системе; и то, и другое нежелательно. Демпфирование вертикального положения контейнера, обеспечиваемое настоящим изобретением, позволяет избежать таких сложностей.
[0084] На фиг. 13А представлен вид сверху с частичным разрезом рычагов 1108, 1110, осей 1206 и платформы 922 ограничителя 900 контейнера в состоянии готовности для приема контейнера. В этом состоянии (также изображенном на фиг. 12А-С) горизонтальная пружина 1106 смещает поворотные рычаги (1108, 1110) в положение, в котором нижний горизонтальный элемент каждого рычага вращается вокруг его соответствующей оси, так что кончик горизонтального плеча каждого рычага 1108, 1110 поддерживается в приподнятом положении внутри центральной полости 1206 втулки 902 контейнера. Эта сила также принуждает верхние вертикальные плечи соответствующих рычагов 1108, 1110 находиться в положении, при котором верх каждого из них направлен вверх и наружу, в сторону от центра полости 1206. Гибкие фрикционные накладки (1210, 1212) также повернуты наружу, обеспечивая расширенное отверстие (Aw) для приема контейнера, когда он вставлен во втулку 902 контейнера (см., например, фиг. 12А).
[0085] На фиг. 13В представлен вид сверху с частичным разрезом рычагов 1108, 1110, осей 1206 и платформы 922 ограничителя 900 контейнера в состоянии захватывания контейнера. Как показано, когда контейнер 704 полностью вставлен в ограничитель 900, поворотные рычаги 1108 и 1110 принимают полностью зацепленные положения захватывания, а горизонтальная пружина 1106 растягивается в ответ на направленную вниз силу, приложенную к рычагам 1108, 1110. Это помещает верхнее вертикальное плечо соответствующих рычагов 1108 и 1110 в более вертикальное положение (то есть положение верхней части вертикального плеча продвинулось в канал) и позиционирует фрикционные накладки 1210 и 1212 с плотным прилеганием к внешней стороне контейнера 704. Расстояние, разделяющее верх внутренних стенок фрикционных накладок, уменьшается с Aw до Ag, где Ag приблизительно соответствует внешнему диаметру контейнера 704 для его закрепления во время укупоривания крышкой/удаления крышки. Рычаги 1108 и 1110 имеют двойные горизонтальные элементы, которые определяют зазор 1302 между ними, как можно видеть на фиг. 13А. Как показано на фиг. 13А, двойные горизонтальные элементы рычага 1108 чередуются с двойными горизонтальными элементами рычага 1110.
[0086] На фиг. 14А-Е представлены виды в поперечном разрезе альтернативного варианта осуществления ограничителя контейнера в соответствии с изобретением. В частности, на фиг. 14А изображен однорычажный ограничитель контейнера перед вставкой или загрузкой любого контейнера. В отличие от ранее описанного варианта осуществления настоящего изобретения, в этом конкретном варианте осуществления используется только один поворотный L-образный рычаг и неподвижная захватывающая стенка для эффективного удержания контейнера. Этот вариант осуществления настоящего изобретения проиллюстрирован с вертикальными пружинами 906 и 912 в качестве смещающих элементов для платформы 922. Этот вариант осуществления настоящего изобретения также показан с пружиной 1106 в качестве смещающего элемента для единственного рычага 1404. Однако в настоящем документе рассматриваются альтернативные варианты осуществления настоящего изобретения с отличными смещающими элементами или без отдельных смещающих элементов. Например, рассматривается вариант осуществления настоящего изобретения без смещения, приложенного к платформе 922, и смещения, присущего рычагу 1404. Примером собственного смещения рычага 14 может быть смещение, приложенное, например, к шарниру или оси 1406, такое смещение преодолевается направленной вниз силой, приложенной к контейнеру 1206.
[0087] Как показано на фиг. 14А, вертикальные пружины 906 и 912 служат для смещения платформы 922 к нижней поверхности внешней рамы 904 с силой натягивания 2FV. Направляющие штифты 918 и 920 показаны полностью вставленными в направляющие каналы 1202 и 1204 соответственно. Горизонтальная пружина 1106 показана смещающей горизонтальный пружинный анкер 1104 внутрь к неподвижному горизонтальному пружинному штифту 1402 с силой Fh. Эта смещающая внутрь сила должна быть достаточно большой, чтобы поворачивать установленный с возможностью поворота рычаг 1404 вокруг оси 1406, и меньше номинальной направленной вниз силы FInom, которая будет приложена к контейнеру автоматической (или ручной) системой во время вставки в ограничитель контейнера с последующими укупориванием крышкой или удалением крышки. Поворот со смещением переводит этот рычаг 1404 в положение, подходящее для восприятия загрузки контейнера 704. Рычаг 1404 имеет двойные нижние горизонтальные элементы и верхний вертикальный элемент. Двойные горизонтальные элементы рычага 1404 показаны, например, на фиг. 15А. В положении загрузки рычаг 1404 поворачивается так, что кончик каждого горизонтального элемента (с этого вида виден только передний элемент) находится в приподнятом положении внутри центральной полости 1406 втулки 902 контейнера. Следовательно, этот поворот помещает верхний вертикальный элемент рычага 1404 в положение, в котором верхняя часть перемещается наружу от центра полости 1406. Внутренняя поверхность верхнего вертикального элемента имеет контур, соответствующий форме радиального поперечного сечения корпуса того типа контейнера, который должен быть ограничен (круглое поперечное сечение согласно данному варианту осуществления настоящего изобретения), а гибкая фрикционная накладка (1408) прикреплена так, чтобы соответствовать лицевой стороне каждой внутренней поверхности. Эта накладка может состоять из резины, синтетического полимерного материала или другого подходящего материала, который будет служить для обеспечения суммарной силы трения покоя Fs при зацеплении с внешней стороной контейнера. Накладка должна иметь подходящий размер для обеспечения заданного значения суммарной силы трения покоя.
[0088] Неподвижная стенка 1410 расположена внутри центральной полости 1206, напротив вертикального элемента установленного с возможностью поворота рычага 1404. Внутренняя поверхность неподвижной стенки 1410 характеризуется контуром, соответствующий форме радиального поперечного сечения корпуса контейнера того типа, который должен быть ограничен (круглое поперечное сечение согласно этому варианту осуществления настоящего изобретения), а гибкая фрикционная накладка (1412), аналогичная по составу и функциям прокладке 1408, прикреплена так, чтобы соответствовать лицевой стороне внутренней поверхности стенки.
[0089] На фиг. 14В показан узел 108 соединительной муфты, захватывающий контейнер 704, когда он вставляет контейнер в центральную полость 1406 втулки 902 контейнера. Номинальная сила вставки FInom приложена узлом 108 соединительной втулки, когда контейнер перемещается вниз в центральную полость 1206. В этой точке процесса вставки контейнер не зацеплен с установленным с возможностью вращения рычагом 1404. Вертикальные пружины 906 и 912 остаются в своих исходных положениях покоя. Горизонтальная пружина 1106 поддерживает внутреннюю силу Fh между горизонтальным пружинным анкером 1104 и фиксированным горизонтальным пружинным штифтом 1402, тем самым вынуждая установленный с возможностью поворота рычаг 1404 оставаться в положении, подходящем для восприятия загрузки контейнера. На фиг. 14С контейнер был приведен в контакт с приподнятым кончиком каждого нижнего горизонтального элемента установленного с возможностью поворота рычага 1404. Контейнер еще не продвинулся в центральную полость до точки, где он начинает нажимать на приподнятый кончик горизонтального элемента рычага. Как и на фиг. 14А, вертикальные пружины 906 и 912 остаются в своих исходных положениях покоя. Горизонтальная пружина 1106 поддерживает внутреннюю силу Fh, а установленный с возможностью поворота рычаг 1404 остается в положении, подходящем для восприятия загрузки контейнера.
[0090] На фиг. 14D проиллюстрировано дальнейшее продвижение контейнера 704 в контейнер 902 с помощью узла 108 соединительной муфты. В этот момент сила FInom полностью приложена к приподнятым кончикам горизонтальных элементов рычага. Эта сила (FInom), превышающая силу Fh, приложенную к горизонтальным пружинным анкерам 1102 и 1104 и связанным с ними установленным с возможностью поворота рычагам (1108, 1110), приводит к удлинению или растягиванию горизонтальной пружины 1106 по мере того, как приподнятые кончики горизонтальных элементов рычага принудительно направляются вниз, а верхняя часть верхнего вертикального элемента рычага перемещается внутрь к центру полости 1206. Это движение внутрь принуждает гибкие фрикционные накладки (1408, 1412) зацепляться и захватывать внешнюю часть контейнера 704.
[0091] Если требуется дополнительная сила захватывания, узел 108 соединительной муфты может быть продвинут дальше вниз с силой FImax, где FImax больше или равна FInom, и больше 2FV (суммарная смещающая сила, прикладываемая к платформе 922 вертикальными пружинами 906 и 912). Как показано на фиг. 14Е дополнительная направленная вниз сила FImax вынуждает втулку 902 контейнера перемещаться вниз во внешнюю раму 904, когда вертикальные пружины 906 и 912 удлиняются или растягиваются, а платформа 922 движется вниз. Следует обратить внимание на продвижение направляющих штифтов 918 и 920 в каналах 1202 и 1204 от полностью вставленного положения, изображенного на фиг. 14A-D. Это дальнейшее продвижение узла 108 соединительной муфты также приводит к тому, что поворотный рычаг 1404 принимает полностью зацепленное положение захватывания, растягивая горизонтальную пружину 1106 и переводя верхний вертикальный элемент рычага (и гибкую фрикционную накладку 1408) в более вертикальное положение (показано как по существу вертикальное положение на фиг. 14Е). В этом положении фрикционные накладки 1408 и 1412 (фиксированная накладка) прикладывают силу трения покоя Fsf к внешней стороне контейнера 704.
[0092] Когда контейнер 704 полностью зацеплен фрикционными накладками 1408 и 1412, узел 108 соединительной муфты может быть повернут по часовой стрелке (1214), чтобы укупорить крышкой контейнер, или в направлении против часовой стрелки (1216), чтобы удалить крышку контейнера. Как обсуждалось ранее, сопряжение шлицев 612 зацепления в узле 108 соединительной муфты и продольных каналов 706 на крышке контейнера обеспечивает надежный контакт, позволяющий приложить значительный крутящий момент к крышке 702 посредством узла 108 соединительной муфты. Максимальный крутящий момент, который должен быть приложен в направлении по часовой стрелке (TCmax) или против часовой стрелки (TDmax) должен быть меньше, чем сила трения покоя (Fsf), приложенная к внешней стороне контейнера 704, чтобы избежать соскальзывания корпуса контейнера.
[0093] Способность варианта осуществления настоящего изобретения с одним рычагом обеспечивать возможность перемещения втулки 902 контейнера вниз во внешнюю раму 904 дает те же преимущества, что и описанные выше для варианта осуществления настоящего изобретения с несколькими рычагами. Например, автоматические системы для укупоривания крышкой/удаления крышки, такие как описанная выше, переводят вертикальное движение на закрепляемые или открепляемые контейнер/крышку. Если бы вертикальное положение укупориваемого крышкой/открываемого контейнера оставалось неизменным, автоматизированная система должна была бы постоянно корректировать его положение на протяжении всего процесса укупоривания крышкой/удаления крышки. Это, вероятно, потребует повышения уровня сложности, как механической системы, так и системы управления в автоматизированной системе; и то, и другое нежелательно. Демпфирование вертикального положения контейнера, обеспечиваемое настоящим изобретением, позволяет избежать таких сложностей.
[0094] На фиг. 15А представлен вид сверху с частичным разрезом рычага 1404, оси 1406, неподвижной стенки 1410 и платформы 922 однорычажного ограничителя контейнера в состоянии готовности для приема контейнера. В этом состоянии (также изображенном на фиг. 14А-С) горизонтальная пружина 1106 смещает поворотный рычаг 1404 в положение, в котором нижние горизонтальные элементы вращаются вокруг оси 1406, так что кончик каждого горизонтального элемента удерживается в приподнятом положении в пределах центральной полости 1206 втулки 902 контейнера. Эта сила также принуждает верхнее вертикальное плечо рычага 1404 находиться в положении, когда верхняя часть направлена вверх и наружу, в сторону от центра полости 1206. Гибкая фрикционная накладка 1408 также поворачивается наружу, обеспечивая расширенное отверстие (Awf) для приема контейнера, когда он вставляется во втулку 902 контейнера (см., например, фиг. 14А).
[0095] На фиг. 15В представлен вид сверху с частичным разрезом рычага 1404, оси 1406, неподвижной стенки 1410 и платформы 922 однорычажного ограничителя контейнера в состоянии захватывания контейнера. Как показано, когда контейнер 704 полностью вставлен в ограничитель, поворотный рычаг 1404 принимает положение полностью зацепленного положения захватывания, а горизонтальная пружина 1106 растягивается в ответ на направленную вниз силу, приложенную к рычагу. Это переводит верхнее вертикальное плечо рычагов в более вертикальное положение (т.е. положение верхней части вертикального плеча продвинулось в канал) и позиционирует фрикционную накладку 1408 вплотную к внешней стороне контейнера 704. Расстояние, разделяющее верхнюю часть внутренних стенок фрикционной накладки, установленной на рычаге, и внутреннюю поверхность фрикционной накладки (1412), установленной на неподвижной стенке 1410, уменьшено с AWf до Agf, где Agf примерно соответствует внешнему диаметру контейнера 704 для его фиксации во время укупоривания крышкой/удаления крышки.
[0096] Фиг. 16 представляет собой вид снизу однорычажного варианта осуществления описанного в настоящем документе устройства. Часть рычага 1404 видна через прямоугольный проем в платформе 922. Показано, что горизонтальная пружина 1106 смещает горизонтальный пружинный анкер 1104 внутрь к неподвижному горизонтальному пружинному штифту 1402.
[0097] Хотя изобретение в настоящем документе было описано со ссылкой на конкретные варианты осуществления настоящего изобретения, следует понимать, что эти варианты осуществления настоящего изобретения являются просто иллюстрацией принципов и примеров использования настоящего изобретения. Таким образом, следует понимать, что в иллюстративные варианты осуществления настоящего изобретения могут быть внесены многочисленные модификации и что могут быть разработаны другие устройства, не выходящие за рамки сущности и объема настоящего изобретения, как определено прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННАЯ МУФТА И УСТРОЙСТВО СЦЕПЛЕНИЯ | 1992 |
|
RU2238451C2 |
| УЗЕЛ СЦЕПЛЕНИЯ И ФРИКЦИОННАЯ МУФТА ДЛЯ УЗЛА СЦЕПЛЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2156896C2 |
| ФРИКЦИОННАЯ МУФТА, АВТОМОБИЛЬ С ФРИКЦИОННОЙ МУФТОЙ, СЦЕПНОЙ АГРЕГАТ (ВАРИАНТЫ), СЦЕПНОЙ АГРЕГАТ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ, УЗЕЛ ПРИВОДА | 1992 |
|
RU2128792C1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ ТРУБОПРОВОДОВ | 2006 |
|
RU2402713C2 |
| ТРЕХСТУПЕНЧАТЫЙ РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА | 1995 |
|
RU2152638C1 |
| РАБОЧИЕ ОРГАНЫ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2497464C2 |
| УСТРОЙСТВО РЕГУЛИРОВКИ ИЗНОСА НАКЛАДОК ДЛЯ ДИСКОВОГО ТОРМОЗА | 2013 |
|
RU2609842C2 |
| ОДНОРАЗОВЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКОГО РЕЖУЩЕГО И СКРЕПЛЯЮЩЕГО ИНСТРУМЕНТА | 2009 |
|
RU2492818C2 |
| РЕГУЛИРОВОЧНОЕ УСТРОЙСТВО ДЛЯ ДИСКОВОГО ТОРМОЗНОГО МЕХАНИЗМА | 2009 |
|
RU2521876C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ БЛОКИРОВКИ РУЧКИ СШИВАЮЩЕГО АППАРАТА ДЛЯ ТКАНЕЙ | 2012 |
|
RU2623308C2 |

























Группа изобретений относится к механически смещаемому ограничителю контейнера и к способу механического ограничения контейнера. При этом ограничитель имеет узел, содержащий блок, характеризующийся наличием проксимального и дистального конца с каналом в нем от проксимального конца до дистального конца, канал выполнен с возможностью приема контейнера от проксимального конца в блок, канал выполнен с возможностью принимать дистальный конец контейнера, причем проксимальный конец контейнера выполнен с возможностью принимать крышку;по меньшей мере один рычаг, расположенный в непосредственной близости к дистальному концу канала в блоке, при этом по меньшей мере один рычаг прикреплен к блоку с возможностью поворота и при этом рычаг характеризуется наличием радиальной части, которая проходит радиально относительно канала, и аксиальной части, которая проходит аксиально относительно канала, и при этом радиальная и аксиальня части рычага выполнены с возможностью поворота относительно оси, определяемой креплением с возможностью поворота рычага к блоку, причем по меньшей мере один рычаг механически смещен с первой смещающей силой, так что радиальная часть по меньшей мере одного рычага проходит внутрь и вверх в канал, а аксиальная часть по меньшей мере одного рычага проходит вверх и наружу относительно оси канала; в котором в ответ на направленную вниз силу, приложенную контейнером в канале, которая превышает силу механических смещений по меньшей мере одного рычага, рычаг выполнен с возможностью поворота на проксимальном конце радиальной части и аксиальных частей рычага, так что дистальный конец радиальной части выполнен с возможностью сдвигаться вниз в ответ на направленную вниз силу, приложенную к контейнеру, принимаемому каналом, и дистальный конец аксиальной части выполнен с возможностью сдвигаться к контейнеру в канале, так что дистальный конец аксиальной части выполнен с возможностью контакта с контейнером с силой трения покоя (Fs). Ограничитель не требует компьютерного управления и какого-либо внешнего источника энергии, кроме силы, прикладываемой при вставке контейнера в ограничитель. 2 н. и 14 з.п. ф-лы, 47 ил.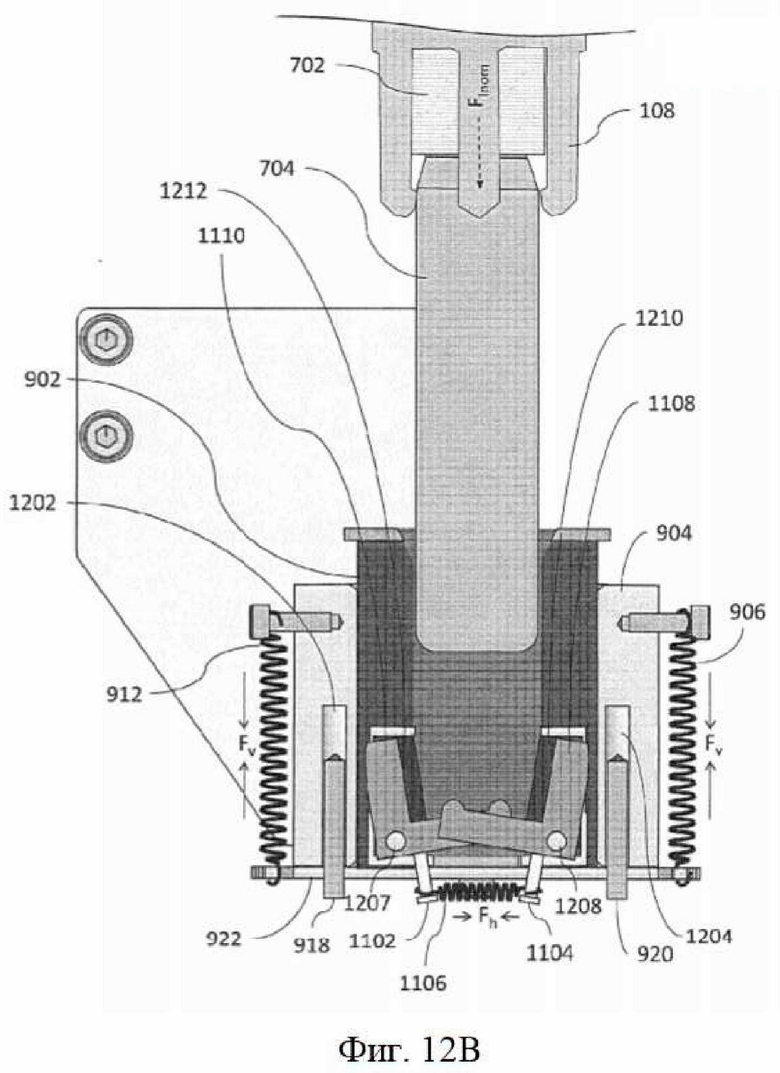
1. Механически смещаемый ограничитель контейнера, содержащий:
узел, содержащий блок, характеризующийся наличием проксимального и дистального конца с каналом в нем от проксимального конца до дистального конца, канал выполнен с возможностью приема контейнера от проксимального конца в блок, канал выполнен с возможностью принимать дистальный конец контейнера, причем проксимальный конец контейнера выполнен с возможностью принимать крышку;
по меньшей мере один рычаг, расположенный в непосредственной близости к дистальному концу канала в блоке, при этом по меньшей мере один рычаг прикреплен к блоку с возможностью поворота и при этом рычаг характеризуется наличием радиальной части, которая проходит радиально относительно канала, и аксиальной части, которая проходит аксиально относительно канала, и при этом радиальная и аксиальня части рычага выполнены с возможностью поворота относительно оси, определяемой креплением с возможностью поворота рычага к блоку, причем по меньшей мере один рычаг механически смещен с первой смещающей силой, так что радиальная часть по меньшей мере одного рычага проходит внутрь и вверх в канал, а аксиальная часть по меньшей мере одного рычага проходит вверх и наружу относительно оси канала;
в котором в ответ на направленную вниз силу, приложенную контейнером в канале, которая превышает силу механических смещений по меньшей мере одного рычага, рычаг выполнен с возможностью поворота на проксимальном конце радиальной части и аксиальных частей рычага, так что дистальный конец радиальной части выполнен с возможностью сдвигаться вниз в ответ на направленную вниз силу, приложенную к контейнеру, принимаемому каналом, и дистальный конец аксиальной части выполнен с возможностью сдвигаться к контейнеру в канале, так что дистальный конец аксиальной части выполнен с возможностью контакта с контейнером с силой трения покоя (Fs).
2. Ограничитель по п. 1, в котором канал характеризуется наличием неподвижного участка стенки, противоположного аксиальной части по меньшей мере одного рычага, при этом каждый неподвижный участок стенки характеризуется наличием расположенной на нем гибкой фрикционной накладки.
3. Ограничитель по п. 2, в котором гибкие фрикционные накладки характеризуются контуром, соответствующим контуру контейнера, принимаемого каналом.
4. Ограничитель по п. 1, в котором ограничитель содержит множество рычагов.
5. Ограничитель по п. 4, в котором ограничитель содержит два рычага, при этом первый рычаг прикреплен с возможностью поворота к блоку на одной стороне канала, а второй рычаг прикреплен с возможностью поворота к блоку на противоположной стороне канала.
6. Ограничитель по п. 5, в котором ограничитель дополнительно содержит механически смещенную нижнюю пластину, при этом механически смещенная нижняя пластина смещена так, чтобы опираться непосредственно на дистальный конец блока со второй смещающей силой.
7. Ограничитель по п. 6, в котором вторая смещающая сила превосходит первую смещающую силу, и также при этом механически смещенная нижняя пластина выдвинута из контакта с блоком, когда направленная вниз сила контейнера приложена к по меньшей мере двум рычагам, позволяя контейнеру быть продвинутым дальше в канал, продвигая таким образом дистальный конец радиальной части по меньшей мере двух рычагов ниже, а дистальный конец аксиальной части по меньшей мере двух рычагов дальше внутрь.
8. Ограничитель по п. 7, дополнительно содержащий одну или несколько пружин, обеспечивающих механическое смещение двух рычагов или механически смещенной нижней пластины, или и двух рычагов, и механически смещаемой пластины.
9. Ограничитель по п. 7, дополнительно содержащий один или несколько направляющих штифтов, соединенных с механически смещенной нижней пластиной, каждый направляющий штифт расположен в направляющем канале, сформированном в блоке.
10. Ограничитель по п. 1, дополнительно содержащий втулку, расположенную в канале, в котором втулка характеризуется наличием фланца с внешним периметром, выходящим за периметр канала, при этом втулка выполнена с возможностью перемещения внутри канала, и при этом фланец предотвращает продвижение втулки за проксимальный конец блока.
11. Ограничитель по п. 8, в котором пружина, которая обеспечивает механическое смещение двух рычагов, дополнительно соединена с блоком.
12. Ограничитель по п. 11, в котором каждый из двух рычагов дополнительно содержит анкер, к которому прикреплена пружина, которая обеспечивает механическое смещение двум рычагам.
13. Ограничитель по п. 5, в котором каждая аксиальная часть двух рычагов характеризуется наличием прикрепленной к ней фрикционной накладки, и при этом накладка выдвинута в контакт с контейнером с силой трения покоя (Fs).
14. Ограничитель по п. 10, в котором втулка продвигается дальше в отверстие блока, когда направленная вниз сила превосходит силу механического смещения, поскольку втулка продвигается с механически смещенной нижней пластиной, когда механически смещенная нижняя пластина выполнена с возможностью сдвига от контакта с блоком в ответ на направленную вниз силу, превышающую смещающую силу, приложенную к механически смещенной нижней пластине.
15. Способ механического ограничения контейнера с использованием ограничителя по п. 1, при этом способ предусматривает этапы, согласно которым:
вставляют конец контейнера без крышки в проксимальный конец канала; и продвигают контейнер в канал с силой, равной или большей, чем первая смещающая сила, чтобы привести конец контейнера без крышки в контакт с дистальным концом радиальной части рычага, тем самым принуждая рычаг поворачиваться и сдвигать обращенную внутрь поверхность аксиальной части рычага в контакт с концом контейнера без крышки.
16. Способ по п. 15, при этом способ дополнительно предусматривает этап, согласно которому:
прикладывают крутящий момент, необходимый для закрепления или снятия навинчивающейся крышки с контейнера, при этом приложенный крутящий момент меньше крутящего момента, вызванного силой Fs, с которой обращенная внутрь поверхность контактирует с контейнером.
| Способ управления процессом полимеризации или сополимеризации альфа-олефинов в газовой фазе | 1984 |
|
SU1249025A1 |
| US 6205888 B1, 27.03.2001 | |||
| ЛИГАТУРА ДЛЯ ВЫПЛАВКИ ЖАРОПРОЧНОГО ТИТАНОВОГО СПЛАВА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2011 |
|
RU2470084C1 |
| US 3848485 A1, 19.11.1974 | |||
| RU 2013147645 А, 27.04.2015. | |||

