Изобретение относится к автотранспортным средствам (АТС) и может быть использовано для обеспечения помехозащищенности бортового электрооборудования к внешнему высокочастотному электромагнитному полю (ЭМП), при эксплуатации АТС, в частности беспилотного автомобильного транспорта, в условиях сложной электромагнитной обстановки, влияющей на нормальную работоспособность электрооборудования.
Из монографии Г. Отт («Методы подавления шумов и помех в электронных системах» Москва: Мир, 1979. - 317 с.) известен способ обеспечения помехозащищенности, основанный на применении пассивных радиоэлементов, различные комбинации которых реализуют в электрических схемах фильтры и гальванические развязки.
Данный способ обеспечивает уменьшения уровня ЭМП, проникающего в электрические схемы по линиям связи за счет внесения потерь.
Недостатком данного способа является наличие паразитных связей в фильтрах и гальванических развязках, вследствие чего в частотной характеристике помехоподавления образуются паразитные резонансные контура, характеризующиеся низкими потерями на резонансных частотах, и при совпадении с частотой ЭМП, наведенные помехи проникают в схему без ослабления, вызывая нарушения работоспособности системы.
Из книги Николаев П.А. «Электромагнитная совместимость автотранспортных средств» [Текст] / Николаев П.А., Кечиев Л.Н. / Под ред. Л.Н. Кечиева. - М.: Грифон, 2015. - 424 с. - (Библиотека ЭМС) известен способ обеспечения помехозащищенности электрооборудования автотранспортных средств, основанный на измерении уровня текущего значения сигнала и его сравнении с усредненным значением, которое вычисляется за серию предыдущих измерений.
При попадании текущего значения в заданное окно допуска, оно признается истинным и учувствует в дальнейшей обработке. При выходе за допуски, текущее измеренное значение признается наведенной ЭМП помехой и исключается как грубая ошибка.
Недостатком способа является то, что он эффективно применяется только для исключения влияния кратковременных электромагнитных помех при медленно меняющихся во времени полезных информационных сигналах. При воздействии длительного непрерывного ЭМП вычисление усредненного значения полезного сигнала происходит с учетом наведенной помехи, которая вносит ошибки в информационный сигнал.
За прототип предлагаемого изобретения принят известный из патента RU 2571430, МПК F02P 17/00, опубл. 20.12.2015, способ обеспечения помехозащищенности бортового электрооборудования АТС к внешнему высокочастотному ЭМП, заключающийся в том, что при попадании АТС в сложную электромагнитную обстановку, бортовыми системами производится установление факта воздействия ЭМП и с последующим переводом в помехоустойчивый режим работы конкретного бортового электрооборудования.
Переход в помехозащищенный режим производится уже по факту искажения полезной информации и не может быть использован для априорного предотвращения нарушения работоспособности бортового электрооборудования АТС.
Задачей изобретения было создание способа обеспечения помехозащищенности АТС, в частности беспилотного автомобильного транспорта, относительно внешнего высокочастотного ЭМП, обеспечивающего снижение влияния ЭМП на бортовое электрооборудование АТС.
Указанная задача решается в способе, заключающемся в том, что при попадании АТС в сложную электромагнитную обстановку, бортовыми системами производится установление факта воздействия ЭМП и переход в помехоустойчивый режим работы бортового электрооборудования.
Технический результат достигается тем, что переход в помехоустойчивый режим работы бортового электрооборудования, происходит на основании выполнения хотя бы одного из двух условий

где Еизм - уровень ЭМП, непрерывно измеряемый в процессе эксплуатации на борту АТС прямым или косвенным методами;
Епр – предельно допустимый уровень ЭМП, соответствующий критерию:
Епр→Рн,
где Рн - вероятность, при которой наиболее ожидаемы нарушения работоспособности АТС при воздействии ЭМП (вероятность поражаемости);
Еа - априорная напряженность ЭМП;
Еизм1 - уровень ЭМП измеренный на АТС в текущий момент времени t1;
Еизм0 - уровень ЭМП измеренный на АТС в момент времени t0, предшествующий текущему моменту времени измерения t1;
t2 - ожидаемый после t1 момент времени измерения.
Помехоустойчивый режим работы реализуется за счет динамического управления функционалом бортового электрооборудования и включает в себя переход на резервный аварийный внутренний режим работы каждого бортового устройства.
Возврат в номинальный режим управления функционалом бортового электрооборудования АТС производится по условию

где  - предельное значение ЭМП, соответствующее критерию:
- предельное значение ЭМП, соответствующее критерию:
где Рр - вероятность, при которой влияние воздействия ЭМП на работоспособность АТС пренебрежимо мало.
Изобретение поясняется следующими чертежами, иллюстрирующими принцип обеспечения помехозащищенности АТС.
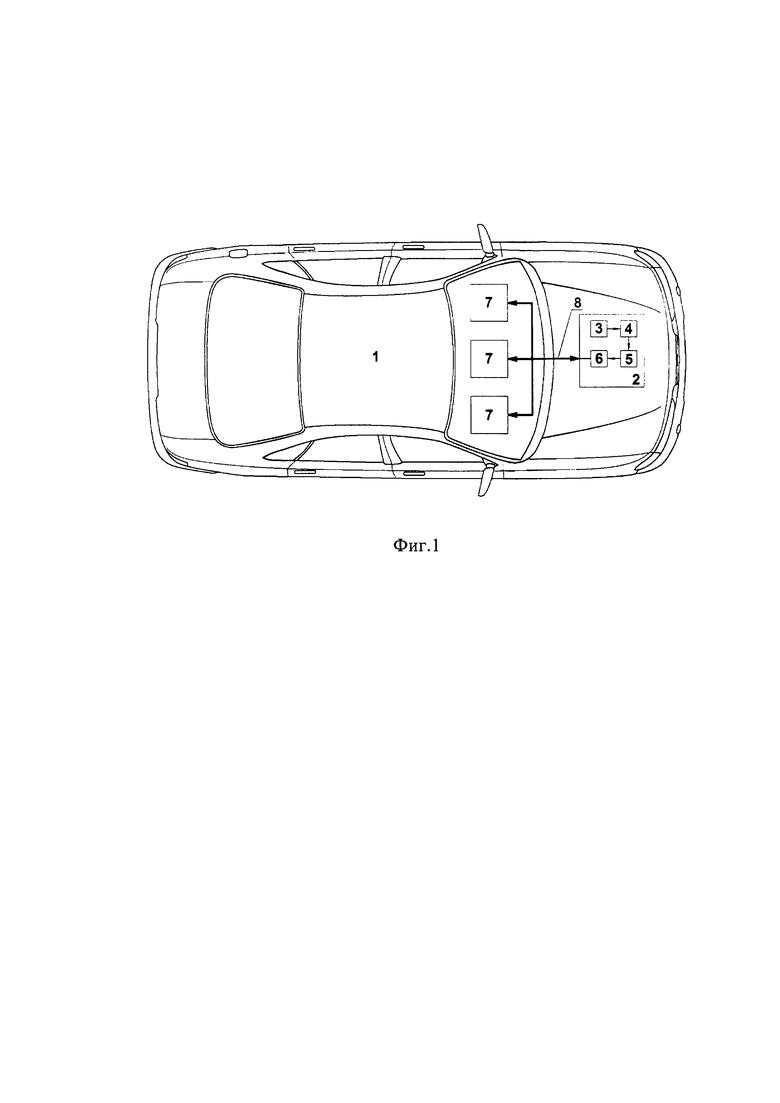
Фиг. 1 иллюстрирует функционал обеспечения помехозащищенности АТС и его взаимосвязь с бортовым комплексом: 1 - АТС; 2 - контроллер обеспечения помехозащищенности; 3 - преобразователь/устройство приема ЭМП (антенна); 4 - детектор; 5 - анализатор; 6 - блок управления помехозащищенностью бортового электрооборудования; 7 - бортовое электрооборудование (блоки/системы); 8 - информационно-диагностическая линия.
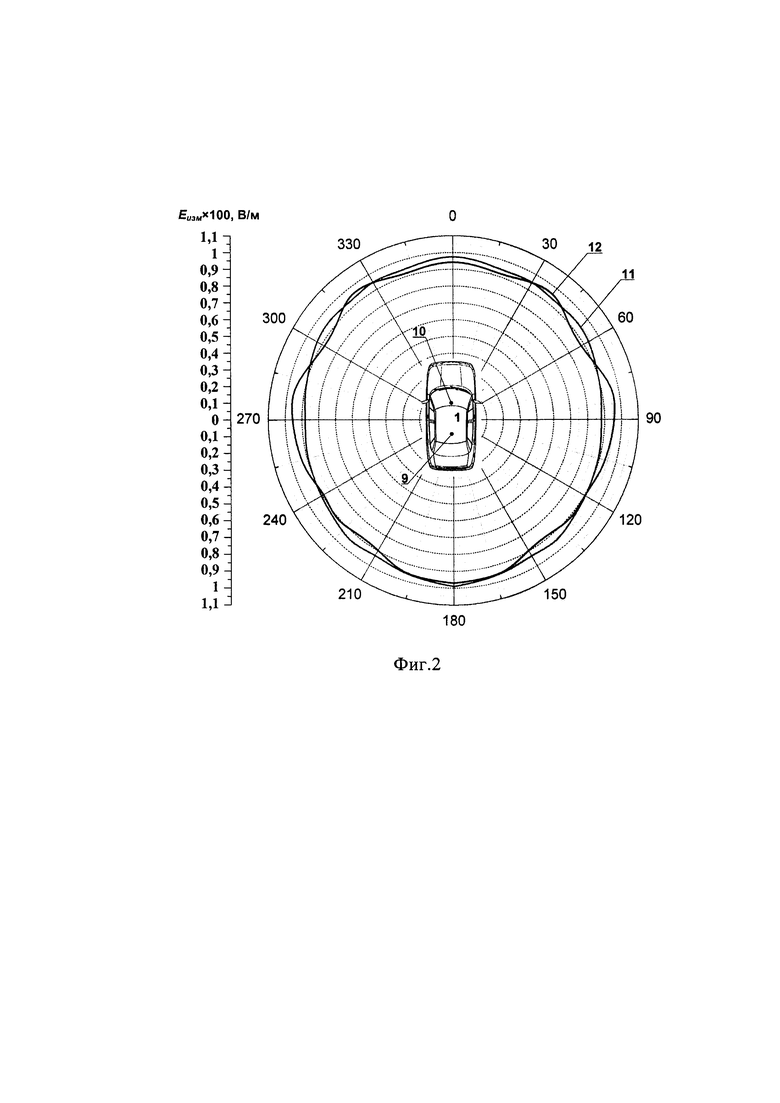
На фиг. 2 изображены оптимальные варианты расположения широкополосного трехкоординатного преобразователя/устройства приема ЭМП (антенны) на АТС и его диаграммы направленности в горизонтальной плоскости на частоте 1 ГГц при прямом методе измерения ЭМП: 9 - расположение преобразователя/устройства приема ЭМП на крыше, симметрично продольной оси АТС; 10 - расположение преобразователя/устройства приема ЭМП в верхней части лобового стекла; 11 - диаграмма направленности для случая расположения преобразователя/устройства приема ЭМП на крыше, симметрично продольной оси АТС; 12 - диаграмма направленности преобразователя/устройства приема ЭМП для случая расположения в верхней части лобового стекла.
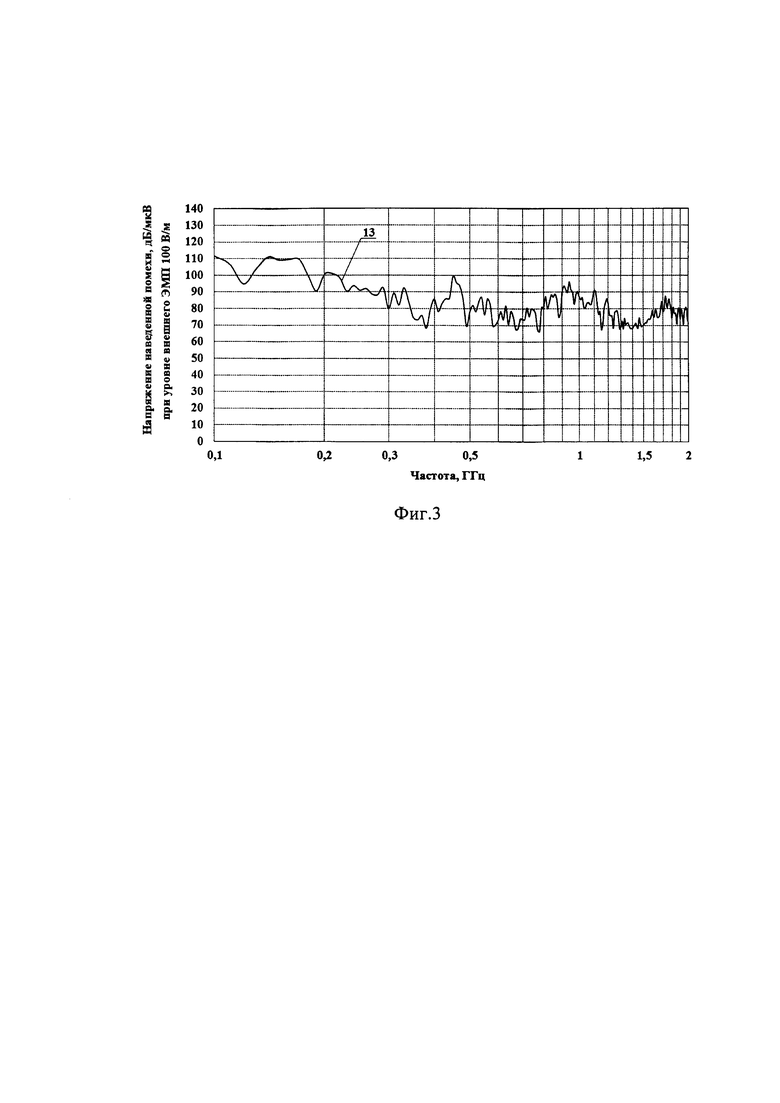
На фиг. 3 изображена характеристика преобразования 13 электрических проводов бортовой электросети электромагнитного поля в напряжение на входе преобразователя/устройства приема ЭМП при косвенном методе измерении ЭМП.
Изобретение может быть реализовано в АТС 1, содержащем в своем составе контроллер обеспечения помехозащищенности 2, включающем в себя преобразователь/устройство приема 3 ЭМП, детектор 4, анализатор 5 и блок управления помехозащищенностью бортового электрооборудования 6. Компоненты контроллера обеспечения помехозащищенности могут быть скомпонованы либо в отдельно расположенном на АТС корпусе, либо выполненными интегрированными в корпус какого-либо из устройств любой из бортовых электротехнических систем АТС. В качестве преобразователя/устройства приема ЭМП 3 может быть применена одна или несколько антенн, работающих в заданном диапазоне частот, или электрические провода бортовой сети АТС, являющиеся преобразователем ЭМП в электрический сигнал, которые могут дополнительно включать в своей конструкции полосовые фильтры. Анализатор 5 дополнительно включает в себя детектор (на Фиг. 1 не показан), устройство сравнения (не показано) сигнала с выхода детектора с опорным, определяющим предельно допустимый уровень ЭМП. Выход блока управления помехозащищенностью бортового электрооборудования 6 электрически соединяется через информационно-диагностическую линию 8 с бортовым электрооборудованием 7 и служит для управления по выходному решению анализатора 5 задачи обеспечения помехозащищенности бортового электрооборудования.
В процессе эксплуатации АТС непрерывно производит измерения уровня ЭМП внешней ЭМО. В бортовом контроллере обеспечения помехозащищенности 2 на вход преобразователя/устройства приема 3 ЭМП, в качестве которого может выступать или одна широкополосная антенна/датчик, или несколько антенн/датчиков, перекрывающих некоторый заданный диапазон частот, например, от 100 кГц до 18 ГГц, или электрические провода бортовой электросети с заранее известным коэффициентом передачи, поступает аддитивная смесь сигналов от электрооборудования АТС и из внешней среды. Антенна/датчик (антенны/датчики) реализуют прямой метод, а электрические провода бортовой электросети, с заранее известным коэффициентом передачи, реализуют косвенный метод измерения ЭМП. Детектор 4 выделяет огибающую амплитуды (уровня) сигнала ЭМП, которая поступает в анализатор 5, где производится ее обработка, заключающаяся в определении максимального значения, характера и скорости изменения, а также в сравнении с предельно допустимым уровнем. При равенстве или превышении измеренного уровня ЭМП (Еизм), или априорной напряженности ЭМП (Еа), определяемых по скорости изменения (возрастания) амплитуды (уровня), предельно допустимого уровня (Епр), блок управления 6 помехозащищенностью бортового электрооборудования по информационно-диагностической линии 8 передает сформированный сигнал управления (фрейм) о переводе бортового электрооборудования (блоков/систем) 7 в помехозащищенный режим. Помехоустойчивый режим реализуется за счет перехода на резервный аварийный внутренний режим работы каждого бортового устройства, обеспечивающий сохранение основных функций определяющих эксплуатацию АТС, но с уменьшенным функционалом взаимосвязей, а также внутренней диагностики, вследствие чего минимизируется количество электрических каналов и вариантов проникновения ЭМП в схемы бортового электрооборудования.
Переход в помехозащищенный режим по условию Еизм≥Епр происходит при скачкообразном возрастании ЭМП, а по условию Еа≥Епр при монотонном увеличении ЭМП. Выбор значения предельно допустимого уровня Епр определяется из заданной вероятности Рн≥0,8, при которой наиболее ожидаемы нарушения работоспособности АТС при воздействии ЭМП (вероятность поражаемости). Возврат в номинальный режим управления функционалом бортового электрооборудования АТС производится по команде от блока управления помехозащищенностью бортового электрооборудования 6 по условию  где уровень
где уровень  определяется из заданной вероятности Рр<0,2, при которой влияние воздействия ЭМП на работоспособность АТС пренебрежимо мало. Значения Епр и
определяется из заданной вероятности Рр<0,2, при которой влияние воздействия ЭМП на работоспособность АТС пренебрежимо мало. Значения Епр и  определяются на этапах опытно-конструкторских работ при создании АТС.
определяются на этапах опытно-конструкторских работ при создании АТС.
Заявляемое техническое решение основано на понимании того, что чем больше функциональных взаимосвязей между бортовым электрооборудованием, тем выше матрица поражаемости АТС электромагнитным полем. Любое нарушение работоспособности из-за воздействия ЭМП может прямо или косвенно сказаться на безопасности АТС.
Изобретение обеспечивает повышение помехозащищенности АТС, основанное на постоянном, во время эксплуатации АТС, мониторинге внешней электромагнитной обстановки и определении вероятностей поражаемости АТС. В случае попадания АТС в сложную электромагнитную обстановку и реализации событий с высокой вероятностью поражаемости АТС внешним высокочастотным ЭМП контроллер обеспечения помехозащищенности, на время воздействия ЭМП, купирует часть связей узлов бортового электрооборудования (ограничивает количество функциональных взаимосвязей узлов бортового электрооборудования), с сохранением основных его функций, определяющих возможность продолжения эксплуатации АТС, вследствие чего минимизируется количество электрических каналов и вариантов проникновения ЭМП в бортовое электрооборудование.
Техническим результатом изобретения является пониженная вероятность нарушения работоспособности АТС при воздействии ЭМП, и повышенная его электромагнитная безопасность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивного обеспечения помехозащищенности автотранспортных средств | 2023 |
|
RU2815009C1 |
| Способ мониторинга внешней электромагнитной обстановки | 2022 |
|
RU2781760C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРООБОРУДОВАНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ НА ВОСПРИИМЧИВОСТЬ К ЭЛЕКТРОМАГНИТНОМУ ПОЛЮ | 2015 |
|
RU2618835C1 |
| Способ повышения помехозащищённости автотранспортных средств | 2016 |
|
RU2610515C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРООБОРУДОВАНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ НА ВОСПРИИМЧИВОСТЬ К ЭЛЕКТРОМАГНИТНОМУ ПОЛЮ | 2016 |
|
RU2640376C1 |
| Способ испытаний бортовых систем удалённого запуска двигателей автотранспортных средств на устойчивость к воздействию высокочастотного электромагнитного поля | 2022 |
|
RU2795645C1 |
| Способ испытаний автотранспортных средств на восприимчивость к излучаемому электромагнитному полю | 2020 |
|
RU2735001C1 |
| Автотранспортное средство с защитой от воздействия внешнего электромагнитного излучения | 2016 |
|
RU2626448C1 |
| Способ испытаний бортовых систем/устройств измерения и отображения пройденного пути автотранспортного средства на восприимчивость к электромагнитному полю | 2019 |
|
RU2708518C1 |
| Способ испытаний светотехнических систем автотранспортных средств в условиях воздействия электромагнитного поля | 2023 |
|
RU2805344C1 |
Изобретение относится к способам повышения помехоустойчивости систем автомобилей. Способ заключается в установлении бортовыми системами автотранспортного средства факта воздействия внешнего высокочастотного электромагнитного поля, в переводе бортового электрооборудования в помехоустойчивый режим работы. Перевод бортового электрооборудования в помехоустойчивый режим работы осуществляют на основании выполнения любого из двух условий: Еизм≥Епр или 
где Еизм - уровень внешнего электромагнитного поля, Епр – предельно допустимый уровень поля, Еизм1 - уровень внешнего электромагнитного поля в текущий момент времени t1, Еизм0 - уровень внешнего электромагнитного поля в момент времени t0, предшествующий t1; t2 - ожидаемый после t1 момент времени. Помехоустойчивый режим работы реализуется за счет динамического управления функционалом бортового электрооборудования и включает в себя переход на резервный аварийный внутренний режим работы каждого из бортовых устройств, а возврат в номинальный режим управления функционалом бортового электрооборудования АТС производится по условию  где
где  - предельное значение внешнего электромагнитного поля, соответствующее критерию
- предельное значение внешнего электромагнитного поля, соответствующее критерию  где Рр - вероятность, при которой влияние воздействия внешнего электромагнитного поля на работоспособность автотранспортного средства пренебрежимо мало. Технический результат - повышение электромагнитной безопасности. 3 ил.
где Рр - вероятность, при которой влияние воздействия внешнего электромагнитного поля на работоспособность автотранспортного средства пренебрежимо мало. Технический результат - повышение электромагнитной безопасности. 3 ил.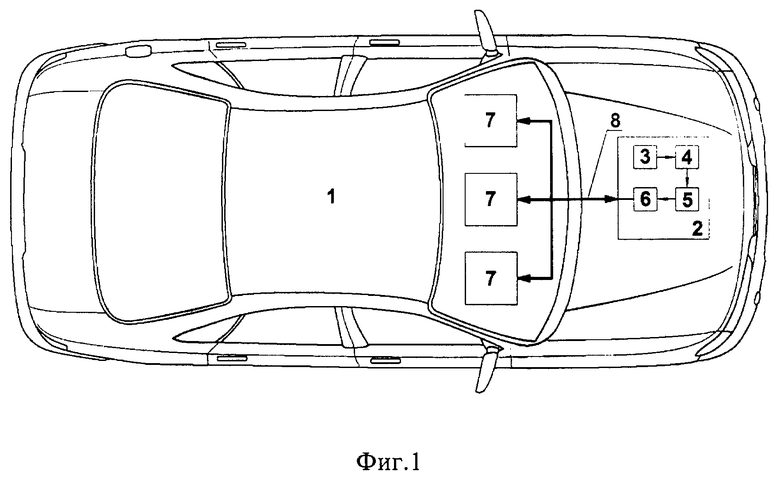
Способ обеспечения помехозащищенности автотранспортного средства, заключающийся в установлении бортовыми системами автотранспортного средства факта воздействия внешнего высокочастотного электромагнитного поля и в переводе бортового электрооборудования в помехоустойчивый режим работы, отличающийся тем, что перевод бортового электрооборудования в помехоустойчивый режим работы осуществляют на основании выполнения любого из двух условий
Еизм≥Епр или

где Еизм - уровень внешнего электромагнитного поля, измеряемый непрерывно на борту автотранспортного средства в процессе эксплуатации автотранспортного средства,
Епр – предельно допустимый уровень внешнего электромагнитного поля, соответствующий критерию Епр→Рн,
где Рн - вероятность, при которой наиболее ожидаемы нарушения работоспособности автотранспортного средства при воздействии внешнего электромагнитного поля,
Еа - априорная напряженность внешнего электромагнитного поля,
Еизм1 - уровень внешнего электромагнитного поля, измеренный на борту автотранспортного средства в текущий момент времени t1,
Еизм0 - уровень внешнего электромагнитного поля, измеренный на борту автотранспортного средства в момент времени t0, предшествующий текущему моменту времени измерения t1;
t2 - ожидаемый после t1 момент времени измерения,
при этом помехоустойчивый режим работы реализуется за счет динамического управления функционалом бортового электрооборудования и включает в себя переход на резервный аварийный внутренний режим работы каждого из бортовых устройств, а возврат в номинальный режим управления функционалом бортового электрооборудования АТС производится по условию
где  - предельное значение внешнего электромагнитного поля, соответствующее критерию
- предельное значение внешнего электромагнитного поля, соответствующее критерию 
где Рр - вероятность, при которой влияние воздействия внешнего электромагнитного поля на работоспособность автотранспортного средства пренебрежимо мало.
| СПОСОБ БОРТОВОЙ ДИАГНОСТИКИ КАТУШЕК ЗАЖИГАНИЯ В УСЛОВИЯХ СЛОЖНОЙ ЭЛЕКТРОМАГНИТНОЙ ОБСТАНОВКИ | 2014 |
|
RU2571430C1 |
| Способ мониторинга внешней электромагнитной обстановки | 2022 |
|
RU2781760C1 |
| СПОСОБ ИСПЫТАНИЙ ОБОРУДОВАНИЯ И/ИЛИ ЭЛЕКТРОННЫХ СИСТЕМ АВТОТРАНСПОРТНЫХ СРЕДСТВ НА ВОСПРИИМЧИВОСТЬ К ЭЛЕКТРОМАГНИТНОМУ ПОЛЮ | 2010 |
|
RU2446409C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРООБОРУДОВАНИЯ АВТОТРАНСПОРТНЫХ СРЕДСТВ НА ВОСПРИИМЧИВОСТЬ К ЭЛЕКТРОМАГНИТНОМУ ПОЛЮ | 2016 |
|
RU2640376C1 |
| Способ испытаний бортовых навигационных модулей устройств/систем вызова экстренных оперативных служб автотранспортных средств | 2022 |
|
RU2776718C1 |
| Способ испытаний систем/устройств вызова экстренных оперативных служб автотранспортных средств | 2020 |
|
RU2740716C1 |
| CN 102043101 A, 04.05.2011 | |||
| US 6426813 B1, 30.07.2002 | |||
| CN 107505509 B, 18.09.2020. | |||

