Настоящее изобретение относится к области ветеринарной медицины, а именно к области реабилитации животных после травмы спинного мозга.
На сегодняшний день травматическое поражение спинного мозга, в следствии экструзии межпозвоночного диска или травмы в следствии падения с высоты или дорожно-транспортного происшествия является частой причиной паралича тазовых конечностей и контроля самостоятельного мочеиспускания среди мелких домашних животных. У пациентов с самой высокой степенью неврологического дефицита (5 степень, modified Frankel scale), при которой не определяется глубокая болевая чувствительность, шансы восстановить опороспособность значительно снижаются, даже при своевременном оказании необходимой помощи. Хирургическое лечение при компрессионном поражении спинного мозга является методом выбора, однако своевременность оказания помощи, наличие квалифицированного специалиста, а также финансовые затраты могут являться затрудняющими факторами лечения, что может привести к полной и необратимой потере моторной функции для тазовых конечностей.
Более того, некомпрессионные заболевания спинного мозга, такие как фиброзно-хрящевая эмболия или острая некомпрессионная экструзия пульпозного ядра, не имеют специфического лечения и при наличии 5ой степени неврологического дефицита имеют плохой прогноз.
К возможным способам восстановления опороспособности у таких пациентов можно отнести реабилитацию, активные занятия которой, могут привести к появлению так называемой «спинальной походки», что не гарантированно в каждом конкретном случае. Помимо этого, для снижения осложнений и улучшения качества жизни, преимущественно на выгуле, возможно использование коляски, однако этот продукт никак не влияет на функционирование конечностей.
Из уровня техники (CN 101692993 А, 14.04.2010) известна система для восстановления квадрипедальных животных после спинальных травм, которая представляет собой комплекс, осуществляющий активацию двигательных функций конечностей животных и поддержание веса тела животного подвижной конструкцией.
Кроме того, (WO 2021195959 А1, 07.10.2021) известно проведение реабилитации крыс с восстановлением двигательной функции их конечностей с помощью нейростимулятора, который осуществляет нейростимуляцию спинного мозга с обратной связь, что обеспечивает восстановление подвижности и силы при движении конечностей животного и неврологических функций, поврежденных в результате травмы спинного мозга.
Однако, в первом источнике не предусмотрено электрическое воздействие на спинной мозг животного, что является одной из ключевых особенностей заявленной системы. Электрическое воздействие на спинной мозг увеличивает проводимость сигнала от головного мозга к конечностям. Также представленная система предполагает наличие алгоритмов контроля силы и частоты импульсов, расчет которых производится с учетом загрузки поврежденных конечностей и требуемой степени поддержки.
Задачей, на решение которой направлено заявляемое изобретение является восстановление подвижности конечностей квадрипедального животного, после спинальной травмы или иного поражения спинного мозга с 5ой степенью неврологического дефицита, с поддержанием их подвижности в процессе реабилитации.
Данная задача решается за счет того, что заявленный способ осуществляет комплексную нейростимуляцию спинного мозга, активируя двигательные функции конечностей животных и поддержание веса тела животного специальной подвижной конструкцией с обратной связью. При этом, используемый в комплексе контроллер позволяет регулировать степень интенсивности электрического сигнала нейростимулятора и нагрузку на задние конечности исходя из текущего состояния подвижности и силовых параметров конечностей животного. Управление контроллером осуществляется специальным программным обеспечением, которое, в том числе, может осуществлять управление системой с мобильных устройств. Таким образом, осуществляется не только стимуляция спинного мозга для активации двигательных функций, но и контролируется максимально допустимая нагрузка на конечности, с целью стимулировать животное к максимально возможному самостоятельному движению. Регулирование нагрузки и нейросигнала с помощью системы обратной связи, в том числе, позволяет восстанавливать двигательную функцию конечностей животного.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является восстановление подвижности и силы при движении конечностей животного, и других неврологических функций, поврежденных в результате травмы спинного мозга или других заболеваний, с нейростимулятором, подержкой веса тела животного, и в том числе восстановления функций без необходимости в дальнейшем использовать поддерживающие и нейростимулирующие устройства.
Сущность изобретения поясняется чертежами, на которых изображено:
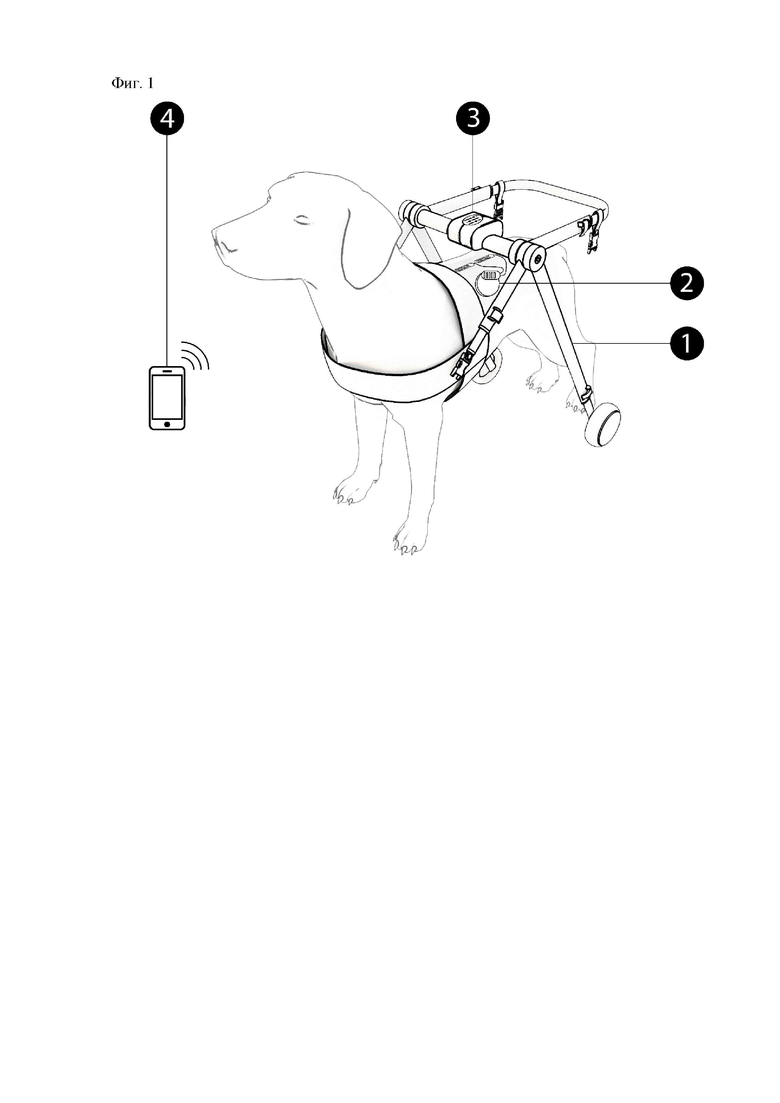
На фиг. 1 - общее изображение системы;
1. Колесная база с регулируемой жесткостью пружины
2. Инвазивный нейростимулятор с электродами.
3. Контроллер (внешняя часть).
4. Мобильное приложение
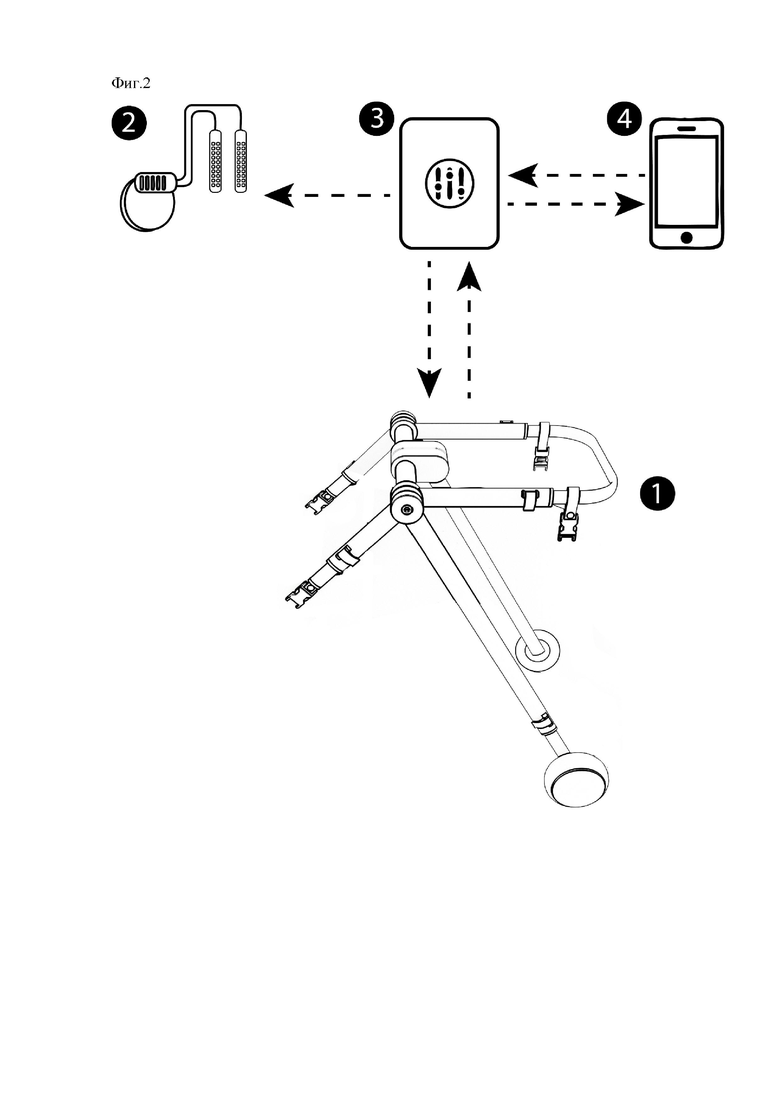
На фиг. 2 - общее изображение системы и схема взаимодействия компонентов:
1. Колесная база с регулируемой жесткостью пружины
2. Инвазивный нейростимулятор с электродами.
3. Контроллер (внешняя часть).
4. Мобильное приложение
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ПОДДЕРЖАНИЯ ДЫХАТЕЛЬНОЙ ФУНКЦИИ ПОСРЕДСТВОМ НЕЙРОСТИМУЛЯЦИИ ПАЦИЕНТОВ, ПОДКЛЮЧЕННЫХ К АППАРАТАМ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2020 |
|
RU2750236C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНОГО СТЕРЕОТИПА ПОСЛЕ ОПЕРАЦИЙ СУХОЖИЛЬНО-МЫШЕЧНЫХ ТРАСНПОЗИЦИЙ У ПАЦИЕНТОВ С ПАРЕЗАМИ, ПАРАЛИЧАМИ И УТРАТОЙ МЫШЦ | 2014 |
|
RU2559583C1 |
| СПОСОБ ТКАНЕВОЙ ИНЖЕНЕРИИ СПИННОГО МОЗГА ПОСЛЕ ЕГО АНАТОМИЧЕСКОГО РАЗРЫВА | 2012 |
|
RU2489176C1 |
| СПОСОБ РЕАБИЛИТАЦИОННОГО ЛЕЧЕНИЯ ОБЕЗДВИЖЕННОГО БОЛЬНОГО | 2010 |
|
RU2435560C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ И ПСИХОРЕЧЕВЫХ ФУНКЦИЙ ПРИ ДЕТСКОМ ЦЕРЕБРАЛЬНОМ ПАРАЛИЧЕ | 2012 |
|
RU2518130C2 |
| СПОСОБ ЛЕЧЕНИЯ СПИНАЛЬНЫХ АРАХНОИДИТОВ И АРАХНОИДАЛЬНЫХ КИСТ | 2013 |
|
RU2536715C1 |
| Способ моделирования лечения больных с двигательными и висцеральными расстройствами на лабораторных животных. | 2020 |
|
RU2749634C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ У ИНВАЛИДОВ С ПОЗВОНОЧНО-СПИННО-МОЗГОВОЙ ТРАВМОЙ | 2009 |
|
RU2392915C1 |
| СПОСОБ ВЫЗОВА ЛОКОМОЦИИ У БОЛЬНЫХ С ПОРАЖЕНИЕМ СПИННОГО МОЗГА | 1997 |
|
RU2142737C1 |
| Способ и устройство контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции | 2022 |
|
RU2822711C2 |
Изобретение относится к области ветеринарной медицины, а именно к области реабилитации животных после травмы спинного мозга. Система для восстановления квадрипедальных животных после спинальных травм представляет собой комплекс для нейростимуляции спинного мозга с активацией двигательных функций конечностей животного и поддержанием веса тела животного подвижной конструкцией, которая представляет собой колесную базу с регулируемой жесткостью пружины. Система выполнена с возможностью восстановления подвижности и силы при движении конечностей животного и неврологических функций, поврежденных в результате травмы спинного мозга. Комплекс содержит контроллер с обратной связью для регулировки степени интенсивности электрического сигнала инвазивного нейростимулятора с электродами и нагрузки на задние конечности, исходя из текущего состояния подвижности и силовых параметров конечностей животного. Управление контроллером осуществляется программным обеспечением, а также с мобильных устройств с контролем максимально допустимой нагрузки на конечности для стимуляции животного к максимально возможному самостоятельному движению. Обеспечивается восстановление подвижности и силы конечностей квадрипедального животного после спинальной травмы с поддержанием веса тела животного в процессе реабилитации без необходимости в дальнейшем использовать поддерживающие и нейростимулирующие устройства. 2 ил.
Система для восстановления квадрипедальных животных после спинальных травм, характеризующаяся тем, что представляет собой комплекс для нейростимуляции спинного мозга с активацией двигательных функций конечностей животного и поддержанием веса тела животного подвижной конструкцией, которая представляет собой колесную базу с регулируемой жесткостью пружины, выполненной с возможностью восстановления подвижности и силы при движении конечностей животного и неврологических функций, поврежденных в результате травмы спинного мозга, причем комплекс содержит контроллер с обратной связью и выполнен с возможностью регулировки степени интенсивности электрического сигнала инвазивного нейростимулятора с электродами и нагрузки на задние конечности, исходя из текущего состояния подвижности и силовых параметров конечностей животного, где управление контроллером осуществляется программным обеспечением, а также с мобильных устройств с контролем максимально допустимой нагрузки на конечности для стимуляции животного к максимально возможному самостоятельному движению.
| CN 101692993 A, 14.04.2010 | |||
| WO 2021195959 A1, 07.10.2021 | |||
| US 2012330376 A1, 27.12.2012 | |||
| KR 20110067792 A, 22.06.2011 | |||
| CN 101804224 A, 18.08.2010 | |||
| WO 2021123914 A1, 24.06.2021 | |||
| АДАПТИВНАЯ СИСТЕМА ТЕРАПИИ (ВАРИАНТЫ) И СИСТЕМА ТЕРАПИИ АКСОНОВ | 2007 |
|
RU2480254C2 |

