ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицине, а именно к физической реабилитации, педиатрии, детской неврологии и ортопедии, физиотерапии, применению аппаратов с биологической обратной связью (БОС), к социальной реабилитации лиц (детей и взрослых) с нарушением постуральной функции в виде невозможности продолжительного удержания головы в вертикальном положении.
УРОВЕНЬ ТЕХНИКИ
Поддержание вертикального положения головы у человека в норме формируется в возрасте от 1,5 до 4 месяцев и является необходимой частью постурального контроля - поддержания поз сидя и стоя, выполнения движений из этих положений, а также изменений позы при взаимодействиях с внешней средой для обеспечения повседневной жизнедеятельности, включая бытовую, профессиональную, учебную, игровую и спортивную деятельность.
Нарушение контроля положения головы может быть связано с дисбалансом тонуса мышц или слабостью мышц при заболеваниях или травмах центральной и периферической нервной системы, например, при детском церебральном параличе (ДЦП) с тяжестью нарушения двигательных функций IV и V по шкале GMFCS, спинальной мышечной атрофии, травме шейного отдела позвоночника и спинного мозга, врожденной и приобретенной кривошеи.
Известно применение устройств, обеспечивающих поддержку головы пациента, неспособного удерживать голову самостоятельно, например (RU 2651090), наиболее эргономичным устройством является HeadPod® (http://www.headpod.com/?lang=en) - устройство динамической поддержки головы детей и взрослых в виде кронштейна, крепящегося к инвалидному креслу и находящегося над головой пациента, обода, охватывающего его голову и связывающей их пластиковой полоски с подстройкой длины. Устройство позволяет уравновесить голову и продолжительно сохранять физиологичное вертикальное положение с возможностью вращения с полной амплитудой. Использование устройства облегчает кормление, общение, логопедические и иные занятия, его продолжительное использование способствует развитию силы мышц шеи (Brown et al., 2018). Недостатком данного устройства является его пассивный характер и отсутствие количественной оценки вклада пациента в поддержание вертикального положения головы.
Известно применение комплексов физических упражнений, улучшающих двигательные возможности детей с нарушением развития, влияющих в том числе на функции мышц туловища и удержания головы. Они включают выполнение комплексов физических упражнений по принципу онтогенетического усложнения (RU 2309720, RU 2615869), физические упражнения, выполняемые из неудобных исходных положений (RU 2482827, RU; RU 2506942), провоцирующие к изменению положения тела и статическим напряжениям; эффектом применения данных способов является некоторое повышение низкого мышечного тонуса мышц воротниковой зоны, спины, мышц бедра, ягодиц. К недостаткам этих методик относится невысокая эффективность для функции удержания головы и ее субъективное, либо с помощью секундомера, оценивание методистом.
Известно применение тренажера для занятий с биологической обратной связью (БОС) для улучшения мелкой моторики у детей (RU 2781417): аппаратно-программный комплекс «Аника» использует реабилитационную перчатку со встроенными датчиками движения, систему захвата движения и вывода его на экран. Выполняют комплексы упражнений в виде компьютерных игр, с последовательным усложнением выполняемых движений. Тренажер позволяет улучшить мелкую моторику и координацию движений кисти и пальцев и оценивать функциональные возможности обследуемого. Недостаток тренажера в том, что реализует тренировку двигательных функций с обратной связью, но не приспособлен для задач тренировки удержания головы.
Известно, что при механической вибрации мышцы или ее сухожилия частотой 60-100 Гц амплитудой 0,8-1 мм возникает импульсация по мышечным афферентным волокнам группы Ia, синхронизированная с частотой вибрации. Это приводит к медленному нарастанию электромиографической активности в стимулируемой мышце - тоническому вибрационному рефлексу (ТВР) (Eklund, Hagbarth, 1966).
Известно применение вибрационной стимуляции для вызова тонического вибрационного рефлекса при обучении стоянию и восстановлении вертикальной позы лиц с глубоким парапарезом или параплегией (RU 2236209 С1). У пациентов, стоящих в вертикальном положении с дополнительной опорой или закрепленных на ортостоле под углом 60-80° к горизонтали, осуществляют активацию ортостатического тонического вибрационного рефлекса путем вибростимуляции нижних конечностей в области подошвы или собственных связок надколенников. Пациентам с расстройствами по спастическому типу вибростимуляцию проводят 50-70 с, амплитудой 1 мм, частотой 35-50 Гц, пациентам с расстройствами по вялому типу - 80-90 с, амплитудой 5 мм, частотой 20 Гц. После вибростимуляции в период угасания ортостатического тонического вибрационного рефлекса пациент самостоятельно удерживает позу стоя. Стимуляцию проводят ежедневно в течение 10 дней, при необходимости курс повторяют. Способ позволяет восстанавливать вертикальную позу у больных с нарушением проводимости по спинному мозгу. Недостатком данного метода является приложение вибростимуляции исключительно к мышцам и сухожилиям ног, тогда как мышцы шеи и туловища, также участвующие в поддержании вертикальной позы, стимуляции не подвергаются.
Известно влияние чрескожной электростимуляции шейного утолщения спинного мозга на устойчивость вертикальной позы у здоровых добровольцев (Иванов П.В. и др., 2018). Чрескожную электрическую стимуляцию стимулами бифазной формы длительностью 1 мс однократно прикладывали на уровне шейных позвонков С3-С4. Использовали частоты 1, 5, 15, 30 и 50 Гц с несущей частотой 10 кГц, длительность воздействия 3 и 10 мин, сила стимула подбиралась индивидуально. Стабилометрические исследования до и после процедуры показали значимое увеличение устойчивости при стимуляции с частотой 5, 15 и 30 Гц.
Известно, что однократное применение чрескожной электростимуляции спинного мозга улучшает стабильность туловища и облегчает контроль позы сидя у лиц с последствиями травмы спинного мозга (Rath et al., 2018). Восемь пациентов с травмой спинного мозга на уровне C3-Th9 с тяжестью поражения А-С по шкале ASIA сидя выполняли различные двигательные задания под контролем электромиографической активности (ЭМГ) мышц туловища, 3D-кинематических и стабилографических характеристик, задания со стимуляцией и без нее выполняли рандомно. Использовали 2-канальную стимуляцию: катоды располагали на уровне позвонков T11-Т12 и L1-L2, аноды - на брюшной стенке латерально. Стимуляцию проводили прямоугольными монофазными импульсами длительностью 1 мс частотой 30 Hz на уровне T11-Т12 и 15 Hz на уровне L1-L2, с несущей частотой 10 kHz. Использовали 3-канальный стимулятор собственной конструкции с амплитудой стимула 0-250 mA, самоклеящиеся электроды (ValuTrode, Axelgaard Ltd., Fallbrook, СА) для катодов диаметром 3.2 см, для анодов 7.5⋅13 см. EMG регистрировали биполярными поверхностными электродами, используя PowerLab 16/35 системы DAQ system (ADInstruments, Australia) с усилителями Octal Bio Amp, AD Instruments, (Australia), стабилографические исследования проводили насиловой платформе «Стабилан-01» (Ритм, Россия), 3D-кинематические данные получали с помощью безмаркерной видео системы Xbox One Kinect (Microsoft Corp., Redmond, WA) с RGB-камерой. Стимуляция привела к повышению активности мышц туловища (mm.erector spinae, rectus abdominis и external obliques), участвующих в контроле позы сидя, более естественному наклону крестца и нормализации лордоза, а также большей стабильности при движениях туловища в разных направлениях. Под электростимуляцией амплитуда смещений общего центра давления существенно снизилась. Недостатком данного метода является отсутствие воздействий на шейный отдел спинного мозга.
Известно применение сочетания чрескожной электростимуляции спинного мозга и тренировки позы сидя у 5 пациентов, полностью парализованных вследствие травмы шейного отдела спинного мозга на уровне позвонков С4-С7 (Tharu et al., 2023). Стимуляцию проводили с расположением активных электродов на уровнях Th11 and L1 позвонков, индифферентных - над гребнями подвздошных костей, бифазными импульсами длительностью 0.1-1.0 мс частотой 20-30 Гц с несущей частотой 10кГц. В результате сочетанной терапии на протяжении 12 недель участники улучшили контроль положения туловища и наклонов вперед и в стороны (без изменений в неврологических характеристиках). Функциональные возможности участников оценивали с помощью системы видеоанализа Vicon с последующей математической и статистической обработкой кинематики движений. Недостатком данного способа воздействия является приложение стимулирующих воздействий в проекции грудного отдела спинного мозга, не оказывающего влияния на шейный отдел, и не влияющий на функцию шейных сегментов и мышц шеи.
Известно применение чрескожной стимуляции спинного мозга с целью обеспечить положение сидя и предотвратить вторичный сколиоз из-за слабости мышц туловища у детей с травмой спинного мозга. В пилотном проекте NCT03975634 (Keller et al., 2021) участвовали 8 детей, в течении 3 визитов в разные дни получавших чрескожную электростимуляцию спинного мозга на уровне позвонков Th11, L1 и С5. Стимулирующий электрод (катод) в виде диска диаметром 2,5 см располагали на средней линии позвоночника между остистыми отростками на 3 уровнях: С5-6, Th11-12 и L1-2.
Индифферентные электроды (аноды) помещали симметрично над гребнями подвздошных костей. Стимуляцию осуществляли прямоугольными импульсами (монополярными и/или биполярными) длительностью 1 мс частотой 15-30 Гц с несущей частотой 10 кГц, индивидуальной величиной тока в диапазоне 30-120 мА. Анализ 3D-кинематики сегментов тела с помощью комплекса MVN BIOMECH Awinda MTW2-3A7G6 (Xsens Technologies B.V. Enschede, Netherlands) показал срочный эффект в виде улучшения (потенциирования) позы сидя (уменьшение кифотической кривой) под действием электростимуляции, показано также уменьшение колебаний общего центра масс (силовая платформа Burtec, FP4060-NC-1000). Стимуляция на грудном и поясничном уровнях переносилась хорошо, тогда как стимуляция на шейном уровне для части детей оказалась болезненной, что повлекло отказ одного ребенка от участия, еще у двоих шейную стимуляцию отключали.
Кроме болезненности при шейной локализации, недостатком описанного способа является то, что разгибание спины у детей часто происходило за счет переразгибания в шейном отделе, что является неоднозначным результатом.
Известен способ электростимуляции шейного утолщения спинного мозга через накожные электроды для восстановления движений рук у больных с верхними параличами и парезами (RU2475283C2). При этом сначала осуществляют базовую электростимуляцию с расположением катода и анода в проекции шейного утолщения спинного мозга на уровне С5-Th1 позвонков, затем проводят селективную электростимуляцию с расположением анода на брюшке паретичной мышцы, а катода - на уровне иннервирующих ее сегментов шейного утолщения. При сниженном тонусе мышц воздействуют частотой 0,5-2 Гц, при повышенном - 3 Гц, с периодической потенциацией частотами 3-7-12 Гц. Способ используют при параличах разной этиологии: вызванных деформациями, нестабильностью, травмой или воспалительными заболеваниями шейного отдела позвоночника, пороками развития, последствиями инсульта и детского церебрального паралича. Восстановление движений рук достигается за счет воздействия на мотонейроны шейного утолщения спинного мозга и иннервируемые ими мышцы. Недостатком данного метода является ограниченное воздействие на постуральные мышцы за счет уровня расположения стимулирующих электродов.
Таким образом, из существующего уровня техники известно, что на постуральный контроль (способность к поддержанию позы) человека можно влиять с помощью вибровоздействий, вызывая тонический вибрационный рефлекс и электровоздействиями, стимулируя разные зоны спинного мозга. Для объективной оценки вызываемых постуральных изменений используют инструментальные методы.
Известно применение систем видеоанализа для регистрации кинематики движений, в том числе для клинических исследований: VICON (Великобритания), Smart-Clinic (Италия), Qualysis (Швеция), «Видеоанализ - Биософт 3D» (Россия). Для этого на контрольные точки тела тела устанавливают светоотражающие маркеры, регистрацию производят видеокамерами с последующим анализом. Недостатками всех этих систем является высокая стоимость оборудования, ограничение пространства исследования расположением камер, необходимость проведения обработки и анализа данных после окончания съемки.
Известно применение комплекса SwayStar (Balance International Innovations, Швейцария https://www.b2i.info/web/index.htm) для изучения баланса человека при статических (стоя) и динамических (в ходьбе) заданиях-тестах, выполняемых здоровыми людьми разного возраста и лицами с различными двигательными расстройствами. Измерительную часть комплекса, содержащую 2-плоскостные гироскоп и акселерометр крепят на пояснице испытуемого, на уровне центра масс (Allum J.H.J et al., 2017) При выполнении тестовых заданий регистрируют угловые перемещения, скорости и ускорения во фронтальной и сагиттальной плоскостях, информацию беспроводным способом (Bluetooth) передают на компьютер, где она в режиме реального времени отображается в графическом виде на экране и сохраняется в памяти. Комплекс идеологически близок к нашему изобретению, но не предназначен для регистрации движений головы, велик для этого (400 г), не предполагает обратных связей и корригирующих воздействий на испытуемого.
Известно применение системы Perception Neuron Pro Perception Neuron https://neuronmocap.com/, обеспечивающей захват движений всего тела человека на основе 32 датчиков IMU (3-осевые гироскоп, акселерометр, магнитометр; вес датчика 32 г), расположенных на всех движущихся сегментах. Беспроводная передача данных обеспечивает свободные движения испытуемых в пределах 10 м без ограничений по скорости движений и освещенности. Движения головы описываются одним датчиком и программно позиционируются относительно других датчиков, расположенных на теле. Датчики этого типа идеально подходят для наших задач, однако в целом данная система избыточна (нет необходимости в 32 датчиках, когда достаточно двух); кроме того, она имеет только визуальную обратную связь без возможности встроить дополнительные корригирующие и/или тренирующие воздействий на испытуемого.
Технической проблемой, решение которой обеспечивается при использовании изобретения, является нарушение контроля положения головы из-за дисбаланса тонуса мышц или слабости мышц у лиц (детей и взрослых) с заболеваниями или травмами центральной и периферической нервной системы, например, при детским церебральным параличе (ДЦП) с тяжестью нарушения двигательных функций IV и V по шкале GMFCS, спинальной мышечной атрофией, травмой шейного отдела спинного мозга, врожденной и приобретенной кривошеей, отсутствие эффективных способов восстановления/формирования контроля положения головы и доступных способов его объективного оценивания.
Задачей было создание эффективных, безопасных и доступных способа и устройства, решающих эти задачи.
Техническим результатом изобретения является создание способа и устройства для его реализации, обеспечивающих инструментальный контроль положения головы пациента с помощью биологической обратной связи, документирование однократных и динамических наблюдений, с возможностью при выходе за пределы допустимого положения головы применить корригирующие воздействия в виде вибростимуляции (ТВР мышц шеи, либо ТВР мышц шеи и туловища) и электростимуляции шейного утолщения спинного мозга и мышц шеи для тренировки удержания головы. Фактически, представленное устройство, одновременно является измерительным инструментом, тренажером а, в случае невозможности прогресса, - протезом функции удержания головы.
Технический результат достигается тем, что на голове и теле пациента располагают не менее двух (максимально до четырех) датчиков положения/движения, содержащих 3-осевые гироскопы, 3-осевые акселерометры и магнитометр, характеризующие положение и движения головы (угловые перемещения, угловые скорости и ускорения), с их помощью определяют актуальное положение головы пациента относительно туловища (референтный датчик/датчики) и относительно земли, возможность и длительность сохранения вертикального положения головы, определяют индивидуальные целевые (не требующие коррекции) и эталонные значения и выявляют рассогласование с этими должными величинами. Для этого могут быть использованы датчики, описывающие положение/движения, например, от системы Perception Neuron Pro или другие миниатюрные датчики типа IMU, обладающие тем же функционалом.
При применении 2 датчиков движения/положения для выявления рассогласований один IMU-датчик располагают на голове, второй - на туловище пациента, при необходимости дополнительные IMU-датчики располагают на нижележащем отделе позвоночника, либо на одном или обоих надплечьях (дополнительные датчики на схеме не представлены). Для осуществления контроля положения головы используют зрительную обратную связь; вибрационную стимуляцию с использованием одного или двух каналов с размещением вибраторов в шейном или шейном и верхне-грудном отделах позвоночника; электростимуляцию спинного мозга и мышц, для чего располагают по меньшей мере одну пару электродов на коже пациента дорсально над сегментами С3-С7 спинного мозга, либо две пары электродов на уровнях С3-С7 и Th2-Th10 симметрично относительно вертикальной оси тела пациента либо асимметрично, либо паравертебрально, располагая пары электродов справа и слева от позвоночника, далее воздействуют последовательностью электрических прямоугольных импульсов через указанные электроды с амплитудой импульсов 10-150 мА, частотой следования импульсов 0,2-100 Гц, длительностью импульса 0,5-1 мс.
Устройство включает не менее двух миниатюрных датчиков движения/положения, содержащих 3-осевые гироскопы, 3-осевые акселерометры и магнитометр, накладываемых на голову и тело пациента для детекции положения головы, блок ввода данных, блок накопления данных с формированием модельных характеристик и уровня допустимых отклонений, не менее 2 таймеров для контроля общего времени занятий и времени рассогласования контрольных показателей, блоки генерации и регулировки параметров вибрационных и электрических стимулов, блок накопления данных о реакции на стимулирующие воздействия, блоки формирования сигнала к корригирующим воздействиям, программное обеспечение, монитор для визуальной обратной связи, ПК/планшет/смартфон для управления.
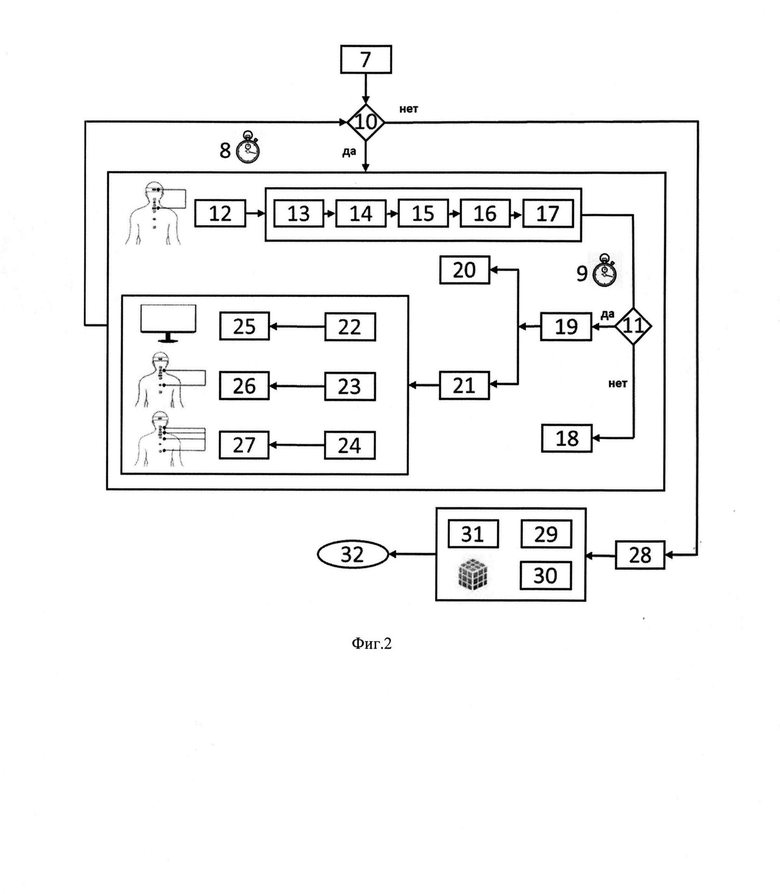
РЕАЛИЗАЦИЯ способа и логическая схема устройства поясняются фиг. 1 и фиг. 2.
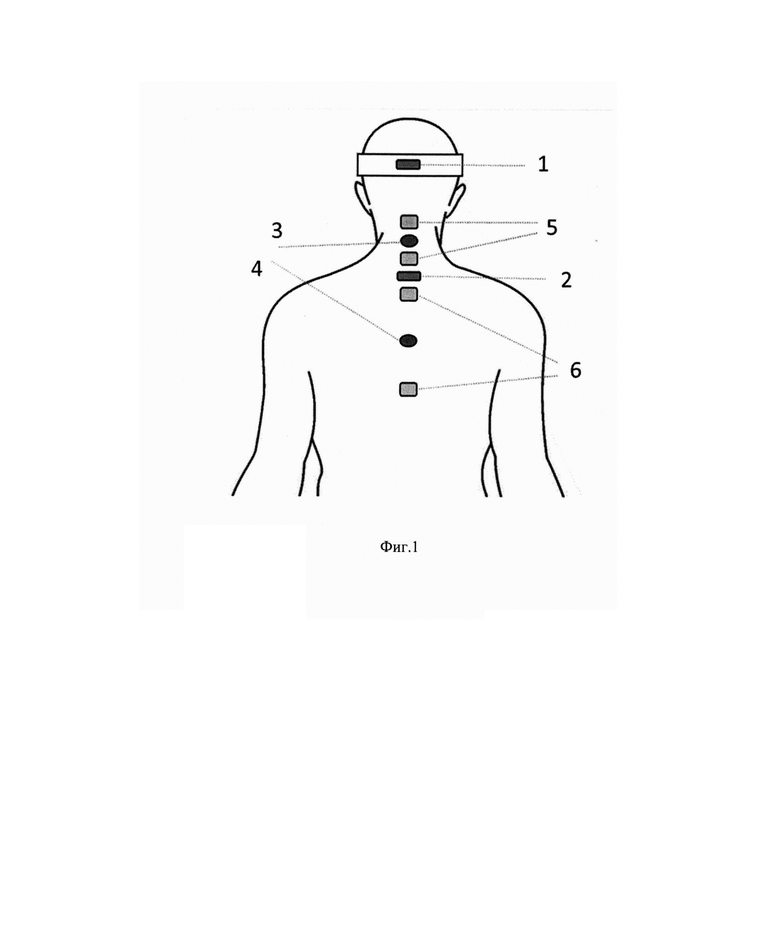
Фиг. 1
1. Датчик движения (основной).
2. Датчик движения (референтный).
3. Вибростимуляция, канал 1.
4. Вибростимуляция, канал 2.
5. Электростимуляция, канал 1 (С3-С7).
6. Электростимуляция, канал 2 (Th2-Th10).
Фиг. 2
7. Настройка параметров.
8. Таймер 1.
9. Таймер 2.
10. Сравнение (таймер 1>время окончания).
11. Сравнение (рассогласование с эталоном).
ЭТАП 1: детекция положения/движений головы
12. Сбор данных.
13. Усиление.
14. Фильтрация.
15. Сегментация.
16. Выделение признаков.
17. Классификация признаков, метод опорных векторов (SVM).
ЭТАП 2: коррекция положения головы (решение)
18. Вариант 1: в коррекции не нуждается.
19. Сброс таймера 2.
20. Вариант 1: диагностика (констатация рассогласования).
21. Вариант 2: показания к тренировке с нейростимуляцией.
ЭТАП 3: тренировка с применением стимуляции
22. Вариант 1: визуальная обратная связь БОС.
23. Вариант 2: вибрационная стимуляция ТВР.
24. Вариант 3: электростимуляция спинного мозга и мышц.
25. Задания, игры, виртуальная реальность.
26. Выбор параметров вибростимуляции: зоны приложения, частоты, амплитуды.
27. Выбор параметров электростимуляции: зоны приложения, частоты, амплитуды.
28. Формирование отчетов.
29. Отчет о динамике состояния.
30. Отчет о реакции на стимуляцию.
31. Формирование баз данных, хранение информации.
32. Оптимизация стимуляции.
СПОСОБ РЕАЛИЗУЕТСЯ следующим образом:
I. B режиме диагностики (оценка функциональных возможностей пациента)
1) Подготовка. На голову пациента в затылочной области центрально с помощью обода из эластичного материала или иным способом крепят датчик положения/движения, референтный датчик крепят в зоне наименьших смещений - под 7 шейным позвонком или между лопаток, в зависимости от анатомических особенностей пациента. При использовании 4 датчиков два дополнительных устанавливают на а. Устанавливают беспроводную связь датчиков с аппаратно-программным комплексом, изображение (положение головы в трехплоскостных координатах по отношению к туловищу, характеризуемому референтным датчиком) выводят на экран монитора/планшета/смартфона. Исследователю важно установить контакт с пациентом и мотивировать его к выполнению тестов: в соответствии с возрастом и ментальными особенностями пациенту предоставляются доступные тесты в виде а) последовательности заданий с инструкцией на экране монитора, б) набора тестов в игровой форме, в) видеоигры (или иного), требующей вертикального положения головы и интересующей пациента. Датчики положения/движения нормируют по эталону.
2) Регистрируют объем пассивных движений головы в сагиттальной, фронтальной и аксиальной плоскостях в положениях сидя, стоя и при ходьбе (если применимо). Выявляют асимметрию/симметричное положение головы во фронтальной плоскости. При необходимости для поддержки головы возможно использование устройства HeadPod или аналогов.
3) Регистрируют объем активных движений головы в сагиттальной, фронтальной и аксиальной плоскостях, в доступных пациенту исходных положениях. Регистрируют продолжительность самостоятельного удержания головы пациентом в вертикальном положении и время, необходимое для восстановления при повторной и последующих попытках.
4) На основании полученных данных оценивают характеристики движений головы (угловые перемещения, скорости угловых перемещений, ускорения в трех плоскостях) и длительность произвольного удержания вертикального положения.
Программно рассчитывают диапазоны эталонного положения головы и допустимого положения головы, не требующего коррекции. Данные заносятся в память как характеристика исходных возможностей испытуемого. В ходе занятия, осуществляемого в статическом (сидя или стоя с опорой) либо динамическом (ходьба в экзоскелете, ходьба с дополнительной опорой) режимах осуществляется регистрация характеристик положения головы в непрерывном режиме с постоянной частотой опроса. Варианты проведения занятий (см. ниже: разделы II-IV) включают режим тренировки с визуальной обратной связью, в том числе виртуальной реальностью, применение вибростимуляции и электростимуляции спинного мозга и мышц.
5) По окончании занятия формируется отчет о продолжительности периодов удержания головы в эталонном и допустимом диапазонах, суммарном времени удержания головы, количестве эпизодов неконтролируемого падения головы, количестве и характере корригирующих воздействий, общей длительности тренировки.
6) При повторных занятиях регистрации предшествующих тренировок/отчеты (по выбору) сохраняются в памяти/облачном хранилище для последующего анализа динамики функции удержания головы.
II. В режиме тренировки с визуальной обратной связью
1) Занятия проводят в положениях сидя или стоя, позиционирование осуществляют в соответствии с функциональными возможностями пациента и наличием специализированных устройств поддержания поз; пациента размещают перед монитором и предлагают упражнения со зрительной обратной связью, стимулирующие к подъему взора и головы, с постепенным увеличением продолжительности удержания головы в вертикальном положении, а затем - расширением репертуара движений, скоростей их выполнения и диапазона углов наклона головы. Предпочтительны занятия в игровой форме, соответствующие возрастным и ментальным особенностям пациента, в том числе с использованием специализированных компьютерных игр.
2) Как часть тренировочного процесса в игровой форме возможно дозированное применение очков виртуальной реальности, например, OCULUS QUEST 2 или аналогов, с подбором контента, стимулирующего вертикальное симметричное положение головы.
III. В режиме вибростимуляции
1) При симметричном положении головы во фронтальной плоскости датчик для проведения локальной вибростимуляции размещают при 1-канальной стимуляции - на задней поверхности шеи, центрально; при 2-канальной - на задней поверхности шеи и в верхнегрудном либо грудном отделе над остистыми отростками позвонков (фиг.).
2) При асимметричном положении головы датчик смещают в противоположную смещению сторону, для обеспечения восстановления симметричного положения головы.
3) На первом занятии с применением вибростимуляции проводят диагностику реакций на вибростимуляцию: для вызова тонического вибрационного рефлекса (ТВР) проводят серию тестов с изменением положения стимулятора, частоты и амплитуды вибрации. Постуральные реакции на стимуляцию (от датчиков движения/положения) накапливаются раздельно для каждого канала стимуляции, в позах сидя и стоя (если выполнимо) для последующего анализа и оптимизации вибровоздействий.
4) На основе собранных данных определяют оптимальный режим воздействий, который используется на протяжении нескольких тренировок, после чего на основании анализа отчетов (продолжительность периодов удержания головы в эталонном и допустимом диапазонах, суммарное времени удержания головы, количество эпизодов неконтролируемого падения головы, количестве и характере корригирующих воздействий, общая длительность тренировки) принимается решение о продолжении либо коррекции режима воздействий.
IV. В режиме электростимуляции спинного мозга и мышц
Для проведения электростимуляции определяют причину дисбаланса положения головы, выбирают мышцы-мишени для коррекции и определяют активирующий либо расслабляющий режимы воздействий. Для усиления эффекта дополнительно (канал 2) стимулируют проприоспинальные нейроны спинного мозга и длинную мышцу спины с расположением стимулирующих электродов грудных позвонков Th2-Th10.
В активирующем режиме воздействие осуществляется в 2 этапа: на первом оказывают общее влияние на шейное утолщение, повышая возбудимость мотонейронов в целом (3-5 сеансов), затем переходят к более селективным воздействиям на заинтересованные мышцы, сгибающие, разгибающие, наклоняющие и ротирующие голову в соответствии с анатомической функцией. Сложность селективного воздействия в расположении мышц шеи слоями, со значительным «перекрытием» функциональных сгибателей и разгибателей. Наклон головы вперед и в сторону обеспечивают длинная мышца головы (С1-С4), длинная мышца шеи (С3-С8), движение головы кзади, разгибание шейного отдела позвоночника, наклон головы назад и вращение - ременная мышца головы (С3-С8), большая и малая задние прямые мышцы головы, верхняя и нижняя косые мышцы головы.
Для симметричного воздействия на шейное утолщение и мышцы шеи катод и анод располагают центрально над остистыми отростками на уровне С3-С7 либо С33-Th1 позвонков, воздействуя на мотонейроны шейного утолщения, подлежащие корешки и мышцы.
При необходимости асимметричного воздействия:
а) электроды слегка смещают от центральной линии в сторону, требующую больших воздействий,
б) используют два канала стимуляции, распологая стимулирующие электроды справа и слева от остистых отростков и задавая разную амплитуду воздействий,
в) при выраженной асимметрии положения головы во фронтальной плоскости для стимуляции подвергают мышц/группу мышц, ответственную за нарушение функции.
При сниженном тонусе мышц воздействуют частотой 0,5-2 Гц, при повышенном - 3 Гц, с периодической потенциацией частотами 7-12-20 Гц, при высокой спастической активности возможно применение режима противоспастической стимуляции в диапазоне 30-70 Гц. Несущих высокочастотных (1-10 кГц) воздействий не применяют. Форма импульса - биполярная либо монополярная, базовая длительность стимула 0,5 мс, с возможностью регулировки в диапазоне от 0,1 до 1 мс. При недостаточной эффективности стимуляции с длительностью стимула 0,5 мс, ее увеличивают с уменьшением амплитуды воздействий; при повышенной болевой чувствительности - длительность стимула укорачивают с увеличением амплитуды воздействий. Приоритет отдают безболезненности процедуры, начиная стимуляцию с заведомо низких амплитуд воздействий и укороченной длительности стимула, постепенно, с учетом времени на адаптацию пациента к новым ощущениям и осознание их как безболезненных. Начинают стимуляцию с подпороговых амплитуд, постепенно увеличивая амплитуду воздействий, ориентируясь на ощущения пациента, при появлении ритмического двигательного ответа - также на минимальную или умеренную двигательную реакцию. Индивидуальный порог чувствительности на уровне шейного утолщения обычно ниже, чем поясничного, поэтому амплитуда воздействия несколько ниже, в пределах 10-40 мА. Коррекция положения головы и тренировка мышц, обеспечивающих ее положение, достигается за счет воздействия на мотонейроны шейного утолщения спинного мозга и иннервируемые ими мышцы головы, шеи и.
Примером позитивной динамики в формировании функции удержания головы могут служить наблюдения, проведенные у 4 детей 7, 8, 10 и15 лет с ДЦП GMFCS IV-V (не стоят, не сидят, не удерживают голову) в ходе тренировок ходьбы в экзоскелете. Тренировка ходьбы в экзоскелете у этой категории детей направлена на компенсацию депривации ходьбы, и призвана стимулировать к двигательному и эмоциональному развитию. Тренировки принудительной ходьбы проходили 2-3 в неделю по 40-60 мин. (20-40 мин. ходьбы), суммарно 14-30 тренировок за 1 или 2 курса. Тренировки сопровождали играми с мячами, светящимися предметами, фехтованием, очками виртуальной реальности для стимуляции подъема взора и головы. Двое детей дополнительно получали электростимуляцию шейного утолщения спинного мозга. Положение головы документировали видеорегистрацией на протяжении всего времени тренировки в начале курса занятий и на последней тренировке.
В ходе тренировок отмечено умеренное снижение гипертонуса мышц ног и рук у большинства участников, у ряда - появление целенаправленных движений рук, облегчение хвата кисти, у всех 4 удлинилось время удержания головы, у пациентов, получавших электростимуляцию, достигнут больший эффект - удержание головы на протяжении 2/3 длительности тренировки. Наблюдения свидетельствуют о возможности улучшения функции удержания головы при ДЦП GMFCS IV-V и актуальности разработки способа и доступного устройства для его реализации.
ЦИТИРОВАННЫЕ ИСТОЧНИКИ
RU 2651090 Табе Евгения Эженовна (RU), Ашмарин Валерий Сергеевич (RU), Новиков Иван Владимирович (RU), Новиков Владимир Иванович (RU), Лебедев Сергей Владимирович (RU) Головодержатель https://findpatent.ru/patent/265/2651090.html
Brown J.E., Thompson М., Brizzolara К. Head Control Changes After Headpod Use in Children With Poor Head Control: A Feasibility Study. Pediatr Phys Ther. 2018 Apr; 30(2): 142-148. doi: 10.1097/PEP.0000000000000492. PMID: 29579004.
RU 2615869 Лупандина-Болотова T.C.(RU), Мамедъяров A.M.(RU), Поляков C.Д.(RU) и др. Способ снижения повышенного мышечного тонуса при последствиях перинатального поражения ЦНС https://findpatent.ru/patent/261/2615869.html 2017
RU 2482827 Пленников В.М. (RU) Способ восстановления мышечного тонуса у детей со спастическими формами церебрального паралича 2013 https://findpatent.ru/patent/248/2482827.html
RU 2309720 Кириллова С.В. (RU), Загородникова О.А. (RU), Коновалова А.В. (RU), Коновалова H.T.(RU) Способ формирования двигательных функций младенца https://findpatent.ru/patent/230/2309720.html 2004
RU 2506942 Губин Э.Н., Губина А.Н. Способ реабилитации детей раннего возраста с последствиями перинатального поражения центральной нервной системы 2014 https://patents.google.com/patent/RU2506942C1/ru
RU 2781417 Кузнецова Е.В. (RU), Бадалов Н.Г. (RU), Воловец C.A. (RU), и др. Способ реабилитации детей с нарушением мелкой моторики верхних конечностей https://findpatent.ru/patent/278/2781417.html
Eklund G., Hagbarth K.E. Tonic vibration reflex in man //Exptl. Neurol. 1966. V. 16(1-4): P.80-92. PMID: 5923486 DOI: 10.1016/0014-4886(66)90088-4
RU 2236210 С1 Коновалова (RU), А.В. Коновалова H.E. (RU), Пономарева (RU) Способ обучения стоянию инвалидов с параплегией, глубоким парапарезом 2003.
RU 2236209 С1 Коновалова Н.Г. (RU), Пономарева Н.Е., Гальцева Т.Н. (RU) Способ восстановления вертикальной позы у больных с нарушением проводимости по спинному мозгу 2003.
П.В. Иванов, Е.А. Михайлова, A.M. Пухов ВЛИЯНИЕ ЭЛЕКТРОСТИМУЛЯЦИИ СПИННОГО МОЗГА НА ВЕРТИКАЛЬНУЮ УСТОЙЧИВОСТЬ ЧЕЛОВЕКА Ульяновский медико-биологический журнал. № 4, 2018 ФИЗИОЛОГИЯ УДК 612.063; 612.084 DOI 10.23648/UMBJ.2018.32.22695
Rath М., Vette А.Н., Ramasubramaniam S., Li К., Burdick J., Edgerton V.R, Gerasimenko YP, Sayenko DG. Trunk Stability Enabled by Noninvasive Spinal Electrical Stimulation after Spinal Cord Injury J Neurotrauma. 2018 Nov 1; 35(21):2540-2553. doi: 10.1089/neu.2017.5584. Epub 2018 Jul 5.PMID: 29786465 Clinical Trial.
Tharu, N.S.; Alam, M.; Ling, Y.T.; Wong, A.Y.; Zheng, Y.-P. Combined Transcutaneous Electrical Spinal Cord Stimulation and Task-Specific Rehabilitation Improves Trunk and Sitting Functions in People with Chronic Tetraplegia. Biomedicines 2023, 11, 34. https://doi.org/10.3390/biomedicines11010034
Keller A, Singh G, Sommerfeld JH, King M, Parikh P, Ugiliweneza B, D'Amico J, Gerasimenko Y, Behrman AL. Noninvasive spinal stimulation safely enables upright posture in children with spinal cord injury. Nat Commun. 2021 Oct 6; 12(1):5850. doi: 10.1038/s41467-021-26026-z. PMID: 34615867; PMCID: PMC8494794.
RU 2475283 C2 Е.Ю. Шапкова, А.Ю. Мушкин Способ восстановления движений рук у больных с верхними параличами и парезами 20.02.2013
Allum J.H.J et al. Mental body transformation deficits in patients with chronic balance disordersJ.Vestib.Res.2017: 27(1); 77-87.
Perception Neuron Pro Perception Neuron https://neuronmocap.com/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ | 2003 |
|
RU2236209C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ | 2003 |
|
RU2236264C1 |
| СПОСОБ ЛЕЧЕБНО-ПРОФИЛАКТИЧЕСКОЙ ГИМНАСТИКИ ДЛЯ ГРУДНЫХ ДЕТЕЙ | 2015 |
|
RU2609985C1 |
| СПОСОБ МЕДИЦИНСКОЙ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ СО СПАСТИЧЕСКОЙ ПАРАПЛЕГИЕЙ ВСЛЕДСТВИЕ ПОВРЕЖДЕНИЯ СПИННОГО МОЗГА НА ГРУДНОМ И ГРУДО-ПОЯСНИЧНОМ УРОВНЕ | 2023 |
|
RU2821772C1 |
| СПОСОБ РЕГУЛЯЦИИ И ВОССТАНОВЛЕНИЯ САМОСТОЯТЕЛЬНОЙ ХОДЬБЫ У ПАЦИЕНТОВ С ДВИГАТЕЛЬНОЙ ПАТОЛОГИЕЙ РАЗЛИЧНОГО ГЕНЕЗА | 2019 |
|
RU2725090C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ДВИЖЕНИЙ РУК У БОЛЬНЫХ С ВЕРХНИМИ ПАРАЛИЧАМИ И ПАРЕЗАМИ | 2011 |
|
RU2475283C2 |
| Способ восстановления функций верхней конечности у пациентов со спинномозговой травмой на шейном уровне | 2020 |
|
RU2747678C1 |
| Способ формирования опорной функции верхних конечностей у пациентов с патологией позвоночника и спинного мозга на шейном уровне | 2019 |
|
RU2715549C1 |
| СПОСОБ ВОССТАНОВИТЕЛЬНОГО ЛЕЧЕНИЯ ПАЦИЕНТОВ С ПОЗВОНОЧНО-СПИННОМОЗГОВОЙ ТРАВМОЙ | 2013 |
|
RU2539164C1 |
Группа изобретений относится к медицине, в частности к способу и устройству контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции. Способ включает количественную оценку положения и движений головы в статических положениях и в ходе динамической двигательной активности. Определяют не требующие коррекции и эталонные значения положения головы, выявляют рассогласование с этими величинами и осуществляют их коррекцию с помощью вибрационной и электростимуляции мотонейронов шейного утолщения и мышц, обеспечивающих вертикальное положение головы. Устройство включает не менее двух миниатюрных датчиков движения/положения, содержащих 3-осевые гироскопы, 3-осевые акселерометры и магнитометр, блок ввода данных, блок накопления данных с формированием модельных характеристик и уровня допустимых отклонений, не менее 2 таймеров, блоки генерации и регулировки вибрационных и электрических стимулов, блок накопления данных о реакции на стимулирующие воздействия, блоки формирования сигнала к корригирующим воздействиям, монитор для визуальной обратной связи, программное обеспечение, ПК/планшет/смартфон для управления. Достигается обеспечение инструментального контроля и коррекции положения головы пациента с помощью биологической обратной связи с возможностью тренировки и протезирования функции удержания головы. 2 н.п. ф-лы, 2 ил., 1 пр.
1. Способ контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции, включающий количественную оценку с помощью не менее чем двух датчиков, содержащих 3-осевые гироскопы, 3-осевые акселерометры и магнитометр, характеризующих положение и движения головы, а именно ее угловые перемещения, угловые скорости и ускорения, с их помощью определяют положение головы пациента относительно туловища и относительно земли, возможность и длительность сохранения вертикального положения головы в статических положениях сидя и стоя, в том числе при выполнении заданий со зрительной обратной связью и в ходе динамической двигательной активности, в том числе естественной, ассистированной или принудительной ходьбы в экзоскелете, определяют индивидуальные не требующие коррекции и эталонные значения положения головы, выявляют рассогласование с этими величинами и осуществляют их коррекцию с помощью вибрационной стимуляции путем вызова тонического вибрационного рефлекса и электростимуляции мотонейронов шейного утолщения и мышц, обеспечивающих вертикальное положение головы.
2. Устройство контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции в соответствии со способом по п. 1, включающее не менее двух датчиков движения/положения, содержащих 3-осевые гироскопы, 3-осевые акселерометры и магнитометр, накладываемых на голову и тело пациента для определения положения головы, блок ввода данных, блок накопления данных с формированием модельных характеристик и уровня допустимых отклонений, не менее двух таймеров для контроля общего времени занятий и времени рассогласования контрольных показателей, блоки генерации и регулировки параметров вибрационных и электрических стимулов, блок накопления данных о реакции на стимулирующие воздействия, блоки формирования сигнала к корригирующим воздействиям, программное обеспечение, монитор для визуальной обратной связи, ПК/планшет/смартфон для управления.
| АНТИСКОЛИОТИЧЕСКИЙ БИОМЕХАНИЧЕСКИЙ ВИБРАЦИОННО-ДЕКОМПРЕССИОННЫЙ ГИМНАСТИЧЕСКИЙ ОЗДОРОВИТЕЛЬНЫЙ СПОСОБ /АСКО-ВИБРОМЕТОД/ В КОМПЛЕКСНОМ КОНСЕРВАТИВНОМ ЛЕЧЕНИИ СКОЛИОТИЧЕСКОЙ БОЛЕЗНИ ПОЗВОНОЧНИКА | 1997 |
|
RU2104684C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У БОЛЬНЫХ С НАРУШЕНИЕМ ПРОВОДИМОСТИ ПО СПИННОМУ МОЗГУ | 2003 |
|
RU2236264C1 |
| СПОСОБ ОБУЧЕНИЯ СТОЯНИЮ ИНВАЛИДОВ С ПАРАПЛЕГИЕЙ, ГЛУБОКИМ ПАРАПАРЕЗОМ | 2003 |
|
RU2236210C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ГОЛОВЫ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ ЧИСТКИ ЗУБОВ | 2017 |
|
RU2759877C2 |
| WO 2020212458 A1, 22.10.2020 | |||
| ЛЕВИК Ю.С | |||
| и др | |||
| Особенности поддержания вертикальной позы у пациентов с болезнью Паркинсона // Альманах клинической медицины, 2008, N 17-2, с | |||
| Искусственный двухслойный мельничный жернов | 1921 |
|
SU217A1 |

