Область техники
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения линейных и угловых скоростей и ускорений снаряда в стволе орудия, составляющих основу параметров движения снаряда на этапе внутренней баллистики и являющихся важнейшими баллистическими характеристиками оружия, оказывающей влияние на его боевые свойства.
Одной из основных задач экспериментальной баллистики является задача измерения параметров движения снаряда по стволу нарезного артиллерийского орудия во время выстрела (линейной и угловой скорости, линейного и углового ускорения, перемещения). При этом наибольший интерес для разработчиков артиллерийских систем и боеприпасов к ним представляют не единичные значения кинематических параметров, измеренных на отдельных участках ствола, но их функциональные зависимости от времени. Только в этом случае возможен наиболее полный анализ поведения боеприпаса во время выстрела и выявление причин при возникновении нештатного функционирования.
Уровень техники
В качестве одного из аналогов может быть рассмотрен способ измерения скорости снаряда на дульном срезе орудия и устройство для его осуществления (патент RU 2651954 на изобретение заявка: 2017109423/03 MПК F41A 21/32 (2006.01), G01P 3/66 (2006.01), G01B 7/00 (2006.01) опубликован: 24.04.2018 Бюл. №12).
В этом аналоге содержащем магнитный поясок, установленный на снаряде, входной и выходной кабели, расположенные на внешней поверхности орудия, формирующие измерительную базу, систему измерения скорости снаряда, вход которой соединен с входным кабелем, на внешнюю поверхность орудия между кабелями наносят периодическую структуру из магнитного порошка, отрезки периодической структуры в виде колец выводят на проводник, который соединен входным кабелем с системой измерения скорости снаряда.
Устройство для измерения скорости снаряда на дульном срезе орудия (фиг. 1) содержит орудийный ствол 1, снаряд 2 с магнитным пояском 3, периодическую структуру 4 на стволе орудия, выполненную из колец, из магнитного порошка, размещенных между кабелями 5, и 6, соединенных проводником 7 для передачи индуцированного токового сигнала в блок 8, в котором формируются временные интервалы последовательности прохождения снаряда 2 (из положения I в положение II) с магнитным пояском 3 под кольцами, сформированными кабелями 5 и 6 и периодической структурой (кольцами из магнитного порошка). Регулярная структура между кольцами из многожильного кабеля создана 98 кольцами из магнитного порошка с шагом 1 см через 0,5 см (позиция А). Начало и окончание временных отсчетов для вычисления дульной скорости снаряда не зависят от величины амплитуд формируемых сигналов, а определяются равномерностью покрытия магнитного порошка на стволе орудия, помехами за счет изменяющейся электромагнитной обстановки. Полученные сигналы обрабатываются, и определяется момент начала (положение I) и окончания отсчета временного интервала прохода снаряда по отрезку пути (положение II), размеченному магнитными кольцами из магнитного порошка. В блоке 9 после получения временных последовательностей (блока 8), формируются отрезки времени, соответствующие пройденным последовательно отрезкам периодической структуры, образованной кольцами на стволе орудия из кабелей и магнитного порошка. Блок 10 служит вычислению скорости прохождения снарядом периодической структуры из магнитных колец, средней величины скорости на дульном срезе, и дисперсии.
Блок 11 корректирует баллистический расчет с учетом полученной фактической скорости снаряда на дульном срезе.
Блок 12 рассчитывает временную поправку Δt на время подрыва снаряда. Блок 13 передает информацию о времени поправки Δt на исполнительный механизм взрывателя снаряда.
Блоки 8-13 составляют систему измерения скорости снаряда.
Недостатком данного аналога является определение величины скорости снаряда только на дульном срезе.
Другим аналогом является адаптивное устройство измерения параметров движения снаряда на этапе внутренней баллистики (патент RU 2780667 на изобретение заявка: 2021135221 МПК F41G 1/00 (2006.01), опубликовано: 30.11.2021 Бюл. №28.
На фиг. 2 представлена функциональная схема адаптивного устройства измерения параметров движения снаряда, на этапе внутренней баллистики. Устройство содержит: источник широкополосного излучения 14, волоконно-оптический циркулятор 15, оптоволоконные деформационные датчики Брэгга 16, установленные в измерительных сечениях ствола орудия, перестраиваемый волоконный фильтр 17, фотоприемное устройство 18, дифференцирующее устройство первой производной сигнала 19, дифференцирующее устройство второй производной сигнала 20, детектор нулевого уровня первой производной сигнала 21, детектор отрицательного значения второй производной сигнала 22, модуль фиксации временных интервалов 23, микроконтроллер 24, цифроаналоговый преобразователь (ЦАП) 25, датчик выстрела 26, блок управления и обработки 27. Устройство работает следующим образом. Излучение от широкополосного источника излучения 14, через входной порт волоконно-оптического циркулятора 15, направляется по оптическому волокну, на деформационные датчики Брэгга 16, размещенные в измерительных сечениях. Излучение, отразившись от датчиков Брэгга 16, по волоконно-оптическому кабелю и двунаправленный порт циркулятора 15, проходит на выходной порт циркулятора 15, и далее на вход перестраиваемого волоконного фильтра 17. До выстрела, определяются начальные величины резонансных длин волн λip деформационных датчиков Брэгга 16, которые могут меняться из-за влияния не информативных воздействий (температуры, деформации). Для этого изменяя кодовую комбинацию цифроаналогового преобразователя 25 ступенчато увеличивают напряжение Uф, на перестраиваемом волоконном фильтре 17. При этом осуществляется дифференцирование сигналов с фотоприемника 18, дифференцирующим устройством первой производной сигнала 19 и дифференцирующим устройством второй производной сигнала 20, определяя значения первых dUic и вторых производных d2Uic сигнала. Детектором нулевого уровня первой производной сигнала 21, и детектором отрицательного значения второй производной сигнала 22, вместе с модулем фиксации временных интервалов 23, определяют время и код, когда значения dU1c=0, и d2U1c<0 соответствуют резонансной длине волны λ1р первого по движению снаряда деформационного датчика Брэгга 16. Значение резонансной длины волны λ1p, и соответствующее ей напряжение на перестраиваемом волоконном фильтре U1ф=U1p сохраняют в оперативной памяти микроконтроллера 24. Аналогичные действия производят с последующими деформационными датчиками Брэгга, периодически повторяя все эти операции до выстрела. Эти операции позволяют адаптировать систему к возможным изменениям деформации и температуры деформационных датчиков Брэгга 16, до выстрела.
При выстреле во время to, срабатывает датчик выстрела 26, сигнал с которого запускает модуль фиксации временных интервалов 23, отсчитывающий интервалы времени движения снаряда между измерительными сечениями. Одновременно с этим, микроконтроллер 24 устанавливает на перестраиваемом волоконном фильтре 17 напряжение U1ф<U1фp, (ранее сохраненное значение - U1ф=U1p в оперативной памяти микроконтроллера 24) при котором λ1фр<λ1рд, а сигнал с фотоприемника Uc=Uш≈0. В момент времени, когда задняя часть снаряда находится в первом измерительном сечении, от воздействия давления пороховых газов ствол орудия в этом сечении расширяется и деформируется. Деформируется и первый деформационный датчик Брэгга 16, а его резонансная длина волны и сигнал с фотоприемника 18, увеличивается. Одновременно с этим, ступенчато увеличивая напряжение, на перестраиваемом волоконном фильтре 17, начиная с ранее установленного значения U1ф<U1p, и осуществляют дифференцирование сигналов с фотоприемника 18.
В момент времени t1, когда первая и вторая производные сигнала с фотоприемника соответствуют соотношениям 'dU1c=0, a d2U1c<0, что соответствует прохождению снарядом первого измерительного сечения на выходе детектора нулевого уровня первой производной сигнала 21, и детектора отрицательного значения второй производной сигнала 22, появляются импульсы, которые попадают в модуль фиксации временных интервалов. При этом, модуль фиксации временных интервалов 23 фиксирует время t1, в памяти микроконтроллера 24.
Затем фиксируют на перестраиваемом фильтре 17, напряжение U2ф<U2p соответствующее длине волны пропускания фильтра λ2ф<λ2p, при которой сигнал с фотоприемника 18, Uc=Ui≈0, и начинают отсчет времени, одновременно увеличивая ступенчато напряжение на перестраиваемом волоконном фильтре 17, начиная со значения U2a<U2p и осуществляя дифференцирование сигналов с фотоприемника 18, а модуль фиксации временных интервалов 23 фиксирует время t2 когда первая и вторая производные сигнала с фотоприемника dU2c=0, a d2U2c<0, что соответствует времени прохождения снарядом второго измерительного сечения. Далее повторяют перечисленные операции для последующих измерительных сечений и определяют t3…tn.
Принимая длину участков между измерительными сечениями равными Li и измеряя время ti прохождения этих участков снарядом, вычисляют линейные, угловые скорости и ускорения снаряда в стволе орудия по формулам:

где Vi - линейная скорость снаряда на i-ом участке;
a i - линейное ускорение снаряда на i-ом участке;
ωi - угловая скорость снаряда на i-ом участке;
а ωi - угловое ускорение снаряда на i-ом участке;
a i - угол наклона нарезов ствола на i-ом участке;
d - калибр ствола, мм.
Недостатком данного аналога является определение величины скорости снаряда только в сечениях, где установлены решетки Брэгга. Наиболее близким к предлагаемому устройству аналогом (прототипом) является лазерный измеритель скорости и/или перемещения малоразмерных объектов в местах с ограниченным доступом (патент RU 2610905 на изобретение заявка: 2015122034 от 09.06.2015 МПК G01S 17/58 (2006.01) опубликован: 17.02.2017 Бюл. №5).
Лазерный измеритель скорости и/или перемещения малоразмерных объектов в местах с ограниченным доступом (фиг. 3) включает: источник 14 лазерного излучения, соединенный оптическим волокном с оптическим изолятором 28, волоконным усилителем 29 с лазерным диодом накачки 30. Оптический делитель 31, выполняющий роль светоделительной пластины для разделения оптического излучения в соотношении 1:1, соединенный оптическим волокном с коннектором FC/APC 32, выполняющим функцию слабо отражающего зеркала, и коллиматором 33 с диаметром пучка 0,8-1,2 мм, и оптическим приемником 18. Выход оптического приемника 18 подключен к входу осциллографа 34, соединенному через USB-интерфейс с персональным компьютером 35. При проведении эксперимента при измерении скорости пули 2 в стволе 1 пневматической винтовки также использовалось защитное оргстекло 36. Элементы измерителя [поз. 14 + поз. 28 + поз. 29 + поз. 30], поз. 31, поз. 32, [поз. 33 + поз. 2], поз. 18 представляют собой оптоволоконный аналог интерферометра Майкельсона.
Источником 14 лазерного излучения является полупроводниковый одночастотный лазер, стабилизированный с помощью брэгговской решетки, работающий на токе 120 мА, с мощностью излучения около 20 мВт и длиной волны 1064 нм при ширине линии генерации не более 3 МГц, что обеспечивает большую длину когерентности и, следовательно, обеспечивает возможность измерения динамики движения объекта в диапазоне перемещения до 100 м и в диапазоне скоростей от 0,1 до 180 м/с. Оптический изолятор 28 пропускает излучение от лазера 14 только в одном направлении и используется для того, чтобы отраженное излучение, идущее в обратном направлении, не оказывало негативного влияния на лазерный диод 30.
Устройство работает следующим образом.
В момент выстрела из пневматической винтовки ИЖ-61 свинцовой пулей весом 0.5 грамма, поршень освобождается спусковым механизмом, что приводит к его движению внутри стакана и, соответственно, к нагнетанию давления. Через специальное отверстие сжатый воздух попадает в канал ствола, что приводит к ускорению пули. Винтовка закреплялась на оптическом столе, защитное оргстекло 36 закреплялось под углом около 60° градусов относительно ствола 1 винтовки. Далее производится выстрел из винтовки посредством нажатия на спусковой крючок с одновременной подачей синхроимпульса на вход синхронизации осциллографа 34 при помощи специального датчика. Осциллограф 34 в режиме однократной записи по приходу синхроимпульса записывает 16776704 отсчетов с периодом снятия dt=2нс. Осциллограмма представляет собой сигнал с оптического приемника 18, т.е. в сущности готовую интерферограмму.
Благодаря эффекту Доплера в данной осциллограмме будут наблюдаться биения с частотой прямо пропорциональной скорости измеряемого объекта (пули), поэтому необходимо вычислить спектральные компоненты осциллограммы в различные моменты времени. Спектрограмма вычисляется с использованием быстрого преобразование Фурье (БПФ), которая далее пересчитывается в скорость пули.
Недостатком прототипа являются необходимость использования лазера с большой длиной когерентности и трудности вычисления спектральных компонентов при больших скоростях снаряда по стволу орудия. Задача, на решение которой направлено заявляемое изобретение, состоит в создании поляризационной системы измерения параметров движения снаряда, по стволу нарезного артиллерийского орудия.
Технический результат, направленный на достижение поставленной задачи, достигается повышением точности измерения линейной и угловой скорости, линейного и углового ускорения, а также перемещения снаряда в стволе нарезного артиллерийского орудия.
Заявленный технический результат достигается за счет того что, в головной части снаряда последовательно по ходу излучения лазера установлены поляризатор плоскости поляризации излучения и отражатель, например, уголковый, отраженное от снаряда излучение направляется через объектив телескопической системы, на вход волоконно-оптического коллиматора, перед которым установлен анализатор плоскости поляризации отраженного от снаряда плоско поляризованного излучения, выход фотоприемника соединен с входом дифференцирующего устройства, а его выход через формирователь импульсов соединен с входом счетчика угловых диапазонов поворота снаряда в стволе орудия. Выход АЦП «конец преобразования» соединен с входом счетчика временных интервалов преобразования АЦП, при этом по цифровым значениям сигнала с АЦП в моменты времени tj, начиная с момента выстрела t0, рассчитывают углы поворота снаряда в стволе нарезного артиллерийского орудия:
где Uij (tj) - цифровые значения электрических сигналов в моменты времени tj на i-ом диапазоне углов поворота снаряда; U0i (tj) - амплитудные значения сигналов в моменты времени tj.
Осуществление изобретения
На фигуре 4 представлена функциональная схема заявляемой поляризационной системы измерения параметров движения снаряда, по стволу нарезного артиллерийского орудия.
Поляризационная система измерения параметров движения снаряда по стволу нарезного артиллерийского орудия включает лазер 14 с широким спектром излучения, установленным в блоке обработки сигналов 27. Волоконный выход лазера 14, соединен с входным портом первого волоконно-оптического циркулятора 15.1. Двунаправленный порт первого волоконно-оптического циркулятора 15.1, соединен оптическим волокном, с двунаправленным портом второго волоконно-оптического циркулятора 15.2, установленным в приемно-передающем модуле 37. Выходной порт второго волоконно-оптического циркулятора 15.2, соединен с волоконным входом первого волоконно-оптического коллиматора 38.1, излучение с которого направляется через отверстие в зеркале 39, на отражающее зеркало 40 и далее на поляризатор плоскости поляризации 41 и уголковый отражатель 42, установленные в головной части снаряда 2. Отраженное от уголкового отражателя 42 и вновь прошедшее поляризатор 41 излучение, при помощи зеркал 40 и 39 принимается объективом 43 и направляется через анализатор плоскости поляризации 44, на вход второго волоконно-оптического коллиматора 38.2, волоконный выход которого соединен с входным портом второго волоконно-оптического циркулятора 15.2. Выходной порт первого волоконно-оптического циркулятора 15.1, соединен с волоконным входом фотоприемника 18. Выход фотоприемника 18 соединен с аналоговым входом аналого-цифрового преобразователя 45 (АЦП) и входом дифференцирующего устройства 19. Выход дифференцирующего устройства 19, через формирователь импульсов 46, соединен с входом двоичного счетчика диапазонов угловых интервалов 47, микроконтроллера 48. Цифровые выходы аналого-цифрового преобразователя 45 соединены с цифровыми входами микроконтроллера 48. Выход АЦП «конец преобразования» соединен с входом счетчика 49 временных интервалов преобразования АЦП. Работа системы тактируется генератором импульсов 50, выход которого через ключ 51, соединен с входом «начало преобразования» АЦП 45.Управляющий вход ключа 51 соединен с датчиком выстрела 26, а выход ключа 51 соединен с входом «запуск» аналого-цифрового преобразователя 45.
Устройство работает следующим образом.
Излучение лазера 14 с широким спектром излучения, через волоконно-оптические циркуляторы 15.1 и 15.2, поступает на волоконный вход волоконно-оптического коллиматора 38.1 и зеркалом 40 направляется по стволу 1, навстречу движению снаряда 2. Отразившись от уголкового отражателя 42 и пройдя поляризатор плоскости поляризации 41, излучение при помощи зеркал 40 и 39, принимается объективом 43, и направляется через анализатор плоскости поляризации 44 на вход волоконно-оптического коллиматора 38.2, и далее по волоконно-оптическим циркуляторам 15.2 и 15.1 на волоконный вход фотоприемника 18 с усилителем электрического сигнала.
При поступательном движении снаряда, снаряд поворачивается вокруг своей оси, за счет нарезов канала ствола 1, и достигает поворота ϕ=360° на дульном срезе ствола орудия. Угловая скорость и ускорение снаряда определяются его линейной скоростью и ускорением, а также крутизной нарезов ствола 1. Мерой крутизны нарезов является угол наклона нарезов а к образующей канала ствола 1. Интенсивность излучения прошедшего через поляризатор 41 и анализатор 44, в соответствии с законом Малюса равна:

где I0 - интенсивность попадающего на поляризатор плоскости поляризации излучения; ϕ - угол между плоскостями поляризации поляризатора 41 и анализатора 44.
Как следует из формулы (1), интенсивность излучения прошедшего через анализатор содержит постоянную и переменную составляющие. Постоянная составляющая не зависит от угла ϕ.
Переменная составляющая электрического сигнала определяется соотношением:

где U0i - амплитудное значение электрического сигнала на выходе фотоприемника 18, при углах поворота снаряда ϕi=90°, 180°, 270°, 360°, фиг. 5. Как следует из соотношения (2), электрический сигнал на выходе фотоприемника 18, при повороте снаряда на 360°, имеет два периода и четыре амплитудных значения, соответствующих углам поворота снаряда Амплитудные значения сигналов U0i, соответствующих углам поворота снаряда ϕi могут отличаться друг от друга, в силу прорыва пороховых газов в канал ствола, которые сохраняются в оперативной памяти микроконтроллера 48, а также время их возникновения t. Углы поворота снаряда вычисляются по значениям сигналов Ui(t) и U0i (t), с использованием обратной тригонометрической функции, область определения которой находится в диапазоне углов 0°≤ϕ≤90°, при этом цифровые значения сигналов сгруппированы по i-ым участкам углов поворота снаряда, расположенными между их амплитудными значениями.
Из соотношения (2) найдем значение угла ϕ:
На первом участке i=1 интервал углов поворота снаряда составляет ϕ=ϕн÷90, на втором i=2 ϕ=90÷180, на третьем i=2 ϕ=180÷270, на четвертом i=4 ϕ=270÷360, на пятом i=5 ϕ=360+ϕн, фиг. 5.
Угол ϕн имеет случайное значение, поскольку его значение определяется при досылке снаряда в ствол орудия. Для определения моментов времени t0i, когда сигнал с фотоприемника 18, имеет амплитудное значение U0i(t), сигнал дифференцируется, устройством дифференцирования 19. В момент времени, когда dU(t)/dt=0, формирователь импульсов 46, формирует импульс, по которому микроконтроллер 48, фиксирует моменты времени t0i, а счетчик угловых интервалов 47, считает их. Микроконтроллер 48, сохраняет в оперативной памяти амплитудные значения сигналов U0i (t), соответствующих углам поворота снаряда ϕ=90°, 180°, 270°, 360°. Работа системы тактируется генератором импульсов 50, выход которого через ключ 51, соединен с входом «начало преобразования» АЦП 45. Управляющий вход ключа 51 соединен с датчиком выстрела 26, а выход ключа 51 соединен с входом «запуск» аналого-цифрового преобразователя 45. Углы поворота снаряда вычисляются по значениям сигнала Ui(t) и U0i (tj), с использованием обратной тригонометрической функции, область определения которой находится в диапазоне углов 0°≤ϕ≤90°, а цифровые значения сигналов сгруппированы по i-ым участкам угловых поворотов снаряда, расположенных между амплитудными значениями сигналов. 7. Группируют в микроконтроллере 49 цифровые значения сигналов в соответствии с участками i углов поворота снаряда, фиг. 5.
По значениям сигналов Ui(t) и U0i(t), рассчитывают текущие углы поворота снаряда ϕi(t) на i-x участках углов поворота снаряда, фиг. 5:





Поскольку снаряд движется с большим ускорением, функция Ui(t) «сжимается» по временной оси, при увеличении угла ϕ и времени t. Для удобства изображения параметров на фиг. 5, сигнал изображен в виде синусоидальной периодической функции.
Заявляемое устройство позволит с высокой точностью измерять параметры движения снаряда по стволу нарезного артиллерийского орудия за счет использования поляризационной системы измерения. Все компоненты системы являются стандартными для телекоммуникационных применений.
Использованные источники информации:
1. Патент RU 2651954 на изобретение заявка: 2017109423/03 МПК F41A 21/32 (2006.01), G01P 3/66 (2006.01), G01B 7/00 (2006.01) опубликован: 24.04.2018 Бюл. №12.
2. Патент RU 2780667 на изобретение заявка: 2021135221 МПК F41G 1/00 (2006.01), опубликован: 30.11.2021 Бюл. №28.
3. Патент RU 2610905 на изобретение заявка: 2015122034 от 09.06.2015 МПК G01S 17/58 (2006.01) опубликован: 17.02.2017 Бюл. №5).
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2780667C1 |
| ПОЛЯРИЗАЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2023 |
|
RU2807259C1 |
| АРТИЛЛЕРИЙСКИЙ СНАРЯД С СИСТЕМОЙ УПРАВЛЕНИЯ ДИСТАНЦИОННОГО ПОДРЫВА | 2022 |
|
RU2797820C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2793829C2 |
| ПОЛЯРИЗАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2022 |
|
RU2798441C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ АРТИЛЛЕРИЙСКОГО СНАРЯДА С ДИСТАНЦИОННЫМ ПОДРЫВОМ В ВОЗДУХЕ | 2022 |
|
RU2816756C1 |
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОННЫЙ ВЗРЫВАТЕЛЬ ДЛЯ МЕЛКОКАЛИБЕРНЫХ БОЕПРИПАСОВ | 2019 |
|
RU2767827C2 |
| ДОПЛЕРОВСКИЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2727778C1 |
| Способ стрельбы из артиллерийского вооружения | 2021 |
|
RU2772681C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ ВЫСОКОСКОРОСТНЫХ СНАРЯДОВ ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2790640C1 |
Изобретение относится к области измерительной техники и касается поляризационной системы измерения параметров движения снаряда по стволу нарезного артиллерийского орудия. Система содержит датчик выстрела, приемо-передающую телескопическую систему, блок обработки сигналов, включающий лазер, излучение которого по оптическому волокну направлено на головную часть снаряда, фотоприемник, аналого-цифровой преобразователь и вычислительное устройство. В головной части снаряда установлены поляризатор и отражатель. Отраженное от снаряда излучение направляется через объектив телескопической системы на вход волоконно-оптического коллиматора, перед которым установлен анализатор плоскости поляризации отраженного излучения. Выход фотоприемника соединен с входом дифференцирующего устройства, а его выход через формирователь импульсов соединен с входом счетчика угловых диапазонов поворота снаряда в стволе орудия, выход АЦП «конец преобразования» соединен с входом счетчика временных интервалов преобразования АЦП. По цифровым значениям сигнала с АЦП в моменты времени tj, начиная с момента выстрела, рассчитывают углы поворота снаряда в стволе орудия. Технический результат заключается в повышении точности измерения параметров движения снаряда по стволу артиллерийского орудия. 5 ил.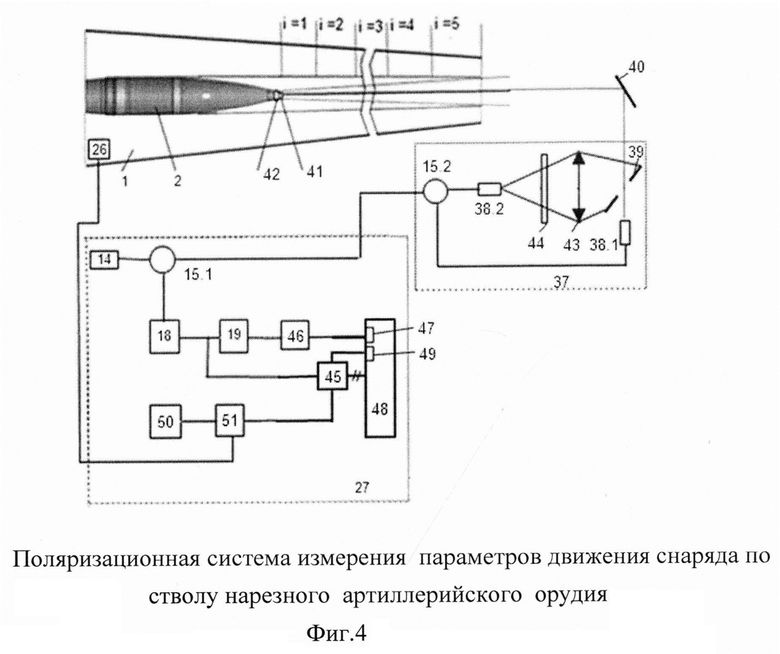
Поляризационная система измерения параметров движения снаряда по стволу нарезного артиллерийского орудия, содержащая датчик выстрела, приемо-передающую телескопическую систему с волоконно-оптическими компонентами, блок обработки сигналов, включающий лазер, излучение которого по оптическому волокну направлено на головную часть снаряда, фотоприемник с волоконным входом, аналого-цифровой преобразователь и вычислительное устройство, отличающееся тем, что в головной части снаряда последовательно по ходу излучения лазера установлены поляризатор плоскости поляризации излучения и отражатель, например, уголковый, отраженное от снаряда излучение направляется через объектив телескопической системы на вход волоконно-оптического коллиматора, перед которым установлен анализатор плоскости поляризации отраженного от снаряда плоско поляризованного излучения, выход фотоприемника соединен с входом дифференцирующего устройства, а его выход через формирователь импульсов соединен с входом счетчика угловых диапазонов поворота снаряда в стволе орудия, выход АЦП «конец преобразования» соединен с входом счетчика временных интервалов преобразования АЦП, при этом по цифровым значениям сигнала с АЦП в моменты времени tj, начиная с момента выстрела t0, рассчитывают углы поворота снаряда в стволе нарезного артиллерийского орудия:
где Uij(tj ) - цифровые значения электрических сигналов в моменты времени tj на i-ом диапазоне углов поворота снаряда; U0i (tj) - амплитудные значения сигналов в моменты времени tj.
| Лазерный измеритель скорости и/или перемещения малоразмерных объектов в местах с ограниченным доступом | 2015 |
|
RU2610905C2 |
| АДАПТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2780667C1 |
| US 5163637 A1, 17.11.1992 | |||
| Рециркуляционная сушилка для термочувствительных материалов | 1974 |
|
SU485292A1 |
