Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения линейных и угловых скоростей и ускорений снаряда в стволе орудия, составляющих основу параметров движения снаряда на этапе внутренней баллистики и являющихся важнейшими баллистическими характеристиками оружия, оказывающей влияние на его боевые свойства.
В качестве одного из аналогов может быть рассмотрен способ определения внутрибаллистических параметров разгона метаемых объектов в ствольных метательных установках (патент RU 2731850 на изобретение заявка: 2020110859/03 МПК F41F 1/00 (2006.01), опубликован: 08.09.2020 Бюл. №25 [1]). В этом способе внутрибаллистические параметры разгона метаемых объектов определяют по деформации стенки ствола. Для этого в качестве датчиков деформации используют тензорезисторы, которые размещают на поверхности ствола вдоль и по периметру измерительных сечений. Определяют величину результирующей деформации в каждом измерительном сечении, которая складывается по показаниям всех датчиков этого сечения и соответствует внутристволовому значению давления в этом сечении. По деформации также фиксируют время прохождения метаемых объектов измерительных сечений, по которому определяют скорость и ускорение. При использовании в качестве ствольных метательных установок пороховых или двухступенчатых легкогазовых установок, тензорезисторы дополнительно размещают на поверхности камеры сгорания и форкамеры.
Определение времени прохождения метаемым телом измерительных сечений, по которому определяют скорость и ускорение, позволяет получить данные о внутрибаллистических параметрах разгона метаемых объектов.
Недостатком способа определения внутрибаллистических параметров разгона метаемых объектов в ствольных метательных установках, является восприимчивость электрических тензодатчиков к электромагнитным и радиочастотным помехам, их недостаточная устойчивость к влажности и экстремальным температурам, а также влияние длины соединяющего кабеля тензодатчика с измерительным устройством на точность измерений.
Другим аналогом является способ измерения параметров движения снаряда на этапе внутренней баллистики (патент RU 2731850 на изобретение, заявка: 2021112927 МПК F41A 21/32 (2006.01), опубликовано: 07.11.2022 Бюл. №31 [2]).
Сущность способа основана на определении деформации стенки ствола деформационными волоконно-оптическими датчиками Брэгга, установленными в различных сечениях ствола орудия, фиксации времени прохождения снарядом измерительных сечений и последующей их обработке.
Основой этого аналога является то, что до выстрела устанавливают начальные параметры деформационных датчиков Брэгга, для чего ступенчато увеличивают напряжение Uф, на перестраиваемом волоконном фильтре. При этом производится дифференцирование сигналов с фотоприемника и определяются значения первых dUic и вторых производных d2Uic сигнала и выбирают из них значения dU1c=0, и d2U1c<0, соответствующих резонансной длине волны λ1р первого по движению снаряда деформационного датчика Брэгга. Сохраняют в оперативной памяти значение резонансной длины волны первого деформационного датчика Брэгга λ1р и соответствующее ей напряжение на перестраиваемом фильтре U1ф=U1p. Производят аналогичные действия с последующими деформационными датчиками Брэгга, периодически повторяя все эти операции до выстрела. В момент времени выстрела t0, фиксируют на перестраиваемом фильтре напряжение U1ф<U1р, соответствующее длине волны перестраиваемого фильтра λ1ф<λ1p, при котором сигнал с фотоприемника Uc=Uш≈0, и начинают отсчет времени, одновременно ступенчато увеличивая напряжение на перестраиваемом волоконном фильтре, начиная с ранее установленного значения U1ф<U1p, и осуществляя дифференцирование сигналов с фотоприемника, фиксируют время t1, когда первая и вторая производные сигнала с фотоприемника dU1c=0, a d2U1c<0, что соответствует времени прохождения снарядом первого измерительного сечения. Затем фиксируют на перестраиваемом фильтре напряжение U2ф<U2р, соответствующее длине волны пропускания фильтра λ2ф<λ2р, при которой сигнал с фотоприемника Uc=Uш≈0. Начинают отсчет времени, одновременно ступенчато увеличивая напряжение на перестраиваемом волоконном фильтре, начиная со значения U2ф<U2р и осуществляя дифференцирование сигналов с фотоприемника, фиксируют время t2, когда первая и вторая производные сигнала с фотоприемника dU2с=0, a d2U2с<0, что соответствует времени прохождения снарядом второго измерительного сечения. Повторяют перечисленные операции для последующих измерительных сечений.
Принимая длину участков между измерительными сечениями, равными Li, и измеряя время ti прохождения этих участков снарядом, вычисляют линейные, угловые скорости и ускорения снаряда в стволе орудия по формулам:

где Vi - линейная скорость снаряда на i-м участке;
ai - линейное ускорение снаряда на i-м участке;
ωi - угловая скорость снаряда на i-м участке;
aωi - угловое ускорение снаряда на i-м участке;
ai - угол наклона нарезов ствола на i-м участке;
d - калибр ствола, мм.
Недостатком данного аналога является ограниченность измерительных сечений, определяемая числом деформационных волоконно-оптических датчиков Брэгга, установленных на стволе орудия.
Наиболее близким решением (прототипом) является способ определения параметров движения снаряда в канале ствола в процессе выстрела методом микроволновой интерферометрии.
В прототипе [3, 4] рассматривается способ измерения линейных, угловых скоростей и ускорений снаряда на этапе внутренней баллистики на базе микроволновых радиоинтерферометров, заключающийся в излучении электромагнитной волны на снаряд, в направлении, противоположном его движению, приеме и преобразовании отраженного от снаряда излучения в электрический сигнал с последующей его обработкой.
Принцип действия микроволновых радиоинтерферометров алогичен оптическим интерферометрам. Они содержат все элементы, присущие последним. Структурная схема радиоинтерферометра для измерения параметров движения снаряда на этапе внутренней баллистики представлена на фиг. 1.
Электромагнитные колебания, излучаемые генератором 1, поступают на двойной Т-образный мост 2 и делятся на два луча - измерительный и опорный. Антенная система 5, являющаяся приемопередающей, направляет измерительный луч на снаряд 7 и принимает отраженный луч, с помощью двойного Т-образного моста направляется в смесительную секцию 6, где происходит его сложение с опорным лучом, амплитуда и фаза которого зависят от фазовращателя 3 и аттенюатора 4, предназначенных для выбора оптимального режима работы смесительной секции. В смесительной секции происходят сложение опорного и измерительного лучей и преобразование интерференционной картины в электрический сигнал.
Получение однозначной интерференционной картины возможно при условии существования или доминирования волны одного типа. Данное требование определяет частоту зондирующего излучения. Используются две методики, отличающиеся по способу возбуждения электромагнитных колебаний в стволе: волноводная методика и квазиволноводная методика. При использовании волноводной методики электромагнитная волна возбуждается в стволе как в круглом волноводе с помощью штыревой антенны, закрепляемой перед дульным срезом.
В зависимости от ориентации антенны относительно оси канала ствола используется волна Н11 (при радиальном расположении) или волна E01 (при осевой ориентации антенны).
Диапазон рабочих частот радиоинтерферометра, используемого в настоящее время в волноводном способе для измерения параметров движения снаряда, составляет 1-4 ГГц. Этот диапазон частот не достаточен для получения необходимого разрешения по перемещению. Увеличение частоты зондирующей электромагнитной волны приводит к возникновению многомодового режима распространения электромагнитной волны в стволе и, как следствие, к увеличению погрешности измерения параметров движения снаряда. В работе [4] оценена погрешность определения параметров движения снаряда, обусловленная присутствием высших мод.
Недостатком волноводного способа является сложность алгоритма обработки радиосигналов и схем его реализации, а также возникновение многомодового режима распространения электромагнитной волны в стволе орудия и, как следствие, увеличение погрешности измерения параметров движения снаряда.
Технической задачей изобретения являются упрощение способа и увеличение точности измерения линейных, угловых скоростей и ускорений снаряда на этапе внутренней баллистики.
Сущность предлагаемого изобретения основана на том, что отраженное от снаряда излучение лазера линейно поляризуют поляризатором, установленным в головной части снаряда, угол поворота снаряда анализируют анализатором плоскости поляризации, преобразуя прошедшее через анализатор излучение в цифровую форму электрического сигнала с заданным временным интервалом, начиная с момента выстрела, дифференцируют сигнал и фиксируют время, когда производные сигнала равны нулю, и модули экстремальных значений сигналов, группируют цифровые значения сигналов по диапазонам, расположенным между экстремальными значениями сигналов, сохраняют сигналы и время их преобразования в оперативной памяти вычислительного устройства и рассчитывают углы поворота снаряда:
По углам поворота снаряда и времени, определяют угловые и линейные скорости и ускорения снаряда в стволе орудия с учетом крутизны нарезов ствола орудия, где Ui(t) - цифровые значения электрических сигналов в моменты времени t; i - номер диапазона углов поворота снаряда между экстремальными значениями сигналов; t0 - момент времени выстрела; Δt - заданный временной интервал преобразования электрического сигнала в цифровую форму; tiэкс - время экстремального значения сигнала на i-м диапазоне углов поворота снаряда;  - модули экстремальных значений сигналов в моменты времени tiэкс.
- модули экстремальных значений сигналов в моменты времени tiэкс.
Данное положение поясняется следующим. Излучение лазера направляют на поляризатор плоскости поляризации и отражатель излучения, установленные в головной части снаряда. Отраженное от снаряда излучение, плоскость поляризации которого поворачивается вместе с поворотом снаряда, направляют на неподвижный анализатор плоскости поляризации и далее на фотоприемник, преобразующий излучение в электрический сигнал. При поступательном движении снаряда, снаряд поворачивается вокруг своей оси, за счет нарезов канала ствола, и достигает поворота ϕ=360° на дульном срезе ствола орудия. Угловая скорость и ускорение снаряда определяются его линейной скоростью и ускорением, а также крутизной нарезов ствола. Мерой крутизны нарезов является α - угол наклона нарезов к образующей канала ствола. Интенсивность излучения, прошедшего через поляризатор и анализатор, в соответствии с законом Малюса, равна:
 ,
,
где I0 - интенсивность попадающего на поляризатор плоскости поляризации излучения; ϕ - угол между плоскостями поляризации поляризатора и анализатора, равный углу поворота снаряда.
Как следует из формулы (1), интенсивность излучения, прошедшего через анализатор, содержит постоянную и переменную составляющие. Постоянная составляющая не зависит от угла ϕ. Переменная составляющая электрического сигнала определяется соотношением:
 ,
,
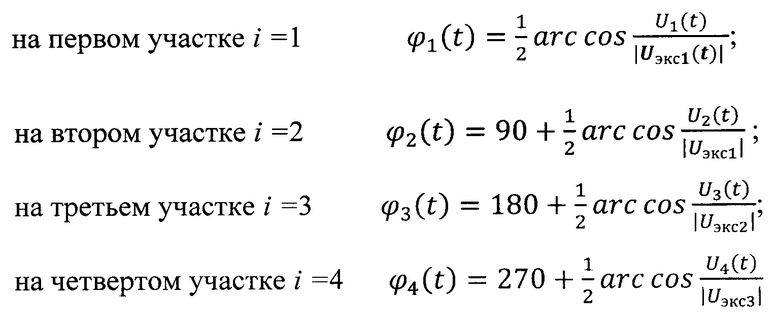
где Uiэкс - экстремальное значение электрического сигнала на выходе фотоприемника. Сигнал имеет два периода, четыре экстремальных значения, соответствующие углам поворота снаряда ϕ=0°, 90°, 180°, 270°, фиг. 3. Для определения углов поворота снаряда по значениям сигнала Ui(t) и Uiэкс, используется обратная тригонометрическая функция, область определения которой находится в диапазоне углов 0°≤ϕ≤180°, цифровые значения сигналов сгруппированы по i-м диапазонам, расположенным между их экстремальными значениями.
При этом на первом участке i=1 диапазон углов поворота снаряда составляет ϕ=0÷90, на втором i=2 ϕ=90÷180, на третьем i=3 ϕ=180÷270, на четвертом i=4 ϕ=270÷360. Переменная составляющая сигнала Ui(t) преобразовывается в цифровую форму с временными интервалами Δt, начиная с момента выстрела t0, и получают n последовательностей цифровых значений сигналов Ui(t), соответствующей временной последовательности t=t0+nΔt. Одновременно с преобразованием сигнала в цифровую форму, сигнал дифференцируют и определяют моменты времени tiэкс, когда сигнал имеет экстремальное значение dU(t)/dt=0 (максимальное или минимальное), соответствующие углам ϕ=0°, 90°, 180°, 270°. Фиксируют моменты времени tiэкс, а также абсолютные значения экстремальных сигналов  , фиг. 3. Сохраняют в оперативной памяти цифровые значения сигналов и времена их преобразования.
, фиг. 3. Сохраняют в оперативной памяти цифровые значения сигналов и времена их преобразования.
Группируют цифровые значения сигналов в соответствии с участками i углов поворота снаряда, фиг. 3.
По значениям сигналов Ui(t) и модулей экстремальных сигналов  рассчитывают текущие углы поворота снаряда ϕi(t) на i-x участках углов поворота снаряда, фиг. 3:
рассчитывают текущие углы поворота снаряда ϕi(t) на i-x участках углов поворота снаряда, фиг. 3:
Поскольку снаряд движется с большим ускорением, функция Ui(t) «сжимается» по временной оси, при увеличении угла ϕ и времени t. Для удобства изображения параметров на фиг. 3, сигнал изображен в виде синусоидальной периодической функции.
Положение снаряда по оси канала ствола в сечении L при угле ϕi(t) и длине нарезов ствола Ln составит:
поступательная скорость снаряда V в сечении L в момент времени t будет:
 .
.
Линейное ускорение снаряда в сечении L ствола составит:
Угловые скорости Ω и ускорения е снаряда в сечениях ствола:
Новыми признаками, обладающими существенными отличиями по способу, является следующая совокупность действий:
1. Отраженное от снаряда излучение лазера линейно поляризуют.
2. Анализируют угловые положения плоскости поляризации отраженного от снаряда излучения, плоскость поляризации которой вращается с удвоенной угловой скоростью вращения снаряда.
3. Преобразуют прошедшее через анализатор плоскости поляризации излучение с вращающейся плоскостью поляризации, в электрический сигнал, из которого выделяют переменную составляющую сигнала, которую преобразуют в цифровую форму с временными интервалами Δt, начиная с момента выстрела t0, и сохраняют в оперативной памяти значения сигналов Ui(t) и время преобразования.
4. Дифференцируют сигнал и определяют моменты времени tiэкс, когда производная dU(t)/dt=0, и определяют в эти моменты времени модули экстремальных значений сигналов  которые соответствуют углам поворота снаряда с поляризатором:
которые соответствуют углам поворота снаряда с поляризатором: 
5. По значениям сигналов рассчитывают углы поворота снаряда ϕi на i-х участках углов поворота снаряда:
Заявляемый способ является результатом научно-исследовательской и экспериментальной работы.
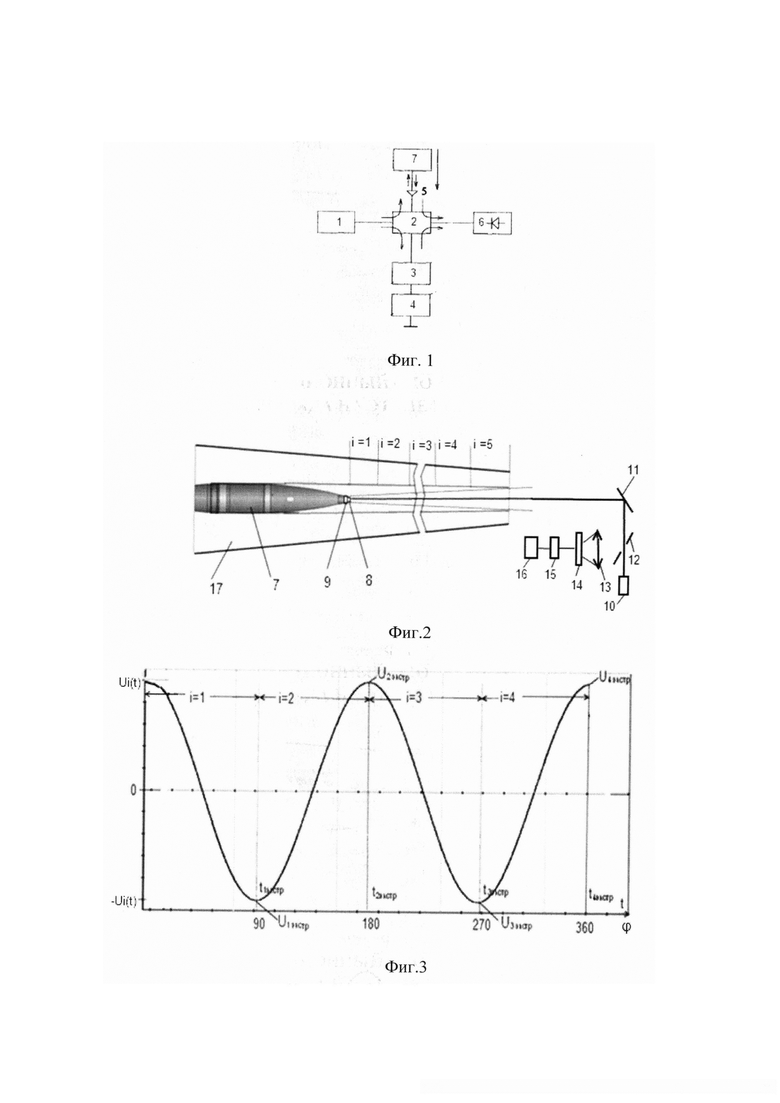
На фигуре 2 приведена схема проведения экспериментов, где:
7 - снаряд;
8 - поляризатор плоскости поляризации излучения;
9 - отражатель (катафот);
10 - узконаправленный источник излучения (лазер с широким спектром излучения);
11 - отражающее зеркало;
12 - отражающее зеркало с отверстием для прохождения лазерного излучения;
13 - телескопическая система;
14 - анализатор отраженного от снаряда поляризованного излучения;
15 - фотоприемник;
16 - модуль измерения параметров движения снаряда;
17 - ствол орудия.
Излучение лазера 10, отраженное от зеркала 11, через отверстие в зеркале 12, направляют по оси ствола 17 орудия навстречу движению снаряда 7. В головной части снаряда 7 последовательно установлены поляризатор плоскости поляризации 8 и отражатель 9. Отраженное от отражателя 9 и вторично прошедшее через поляризатор 8 излучение с вращающейся плоскостью поляризации, равной удвоенной угловой скорости поворота снаряда, направляют на неподвижный анализатор плоскости поляризации 14. Преобразуют отраженное от снаряда излучение с вращающейся плоскостью поляризации, фотоприемником 15 в электрический сигнал, который направляют в модуль измерения параметров движения снаряда 16. В модуле измерения параметров движения снаряда 16:
- фиксируется момент выстрела t0;
- переменная составляющая сигнала Ui(t) преобразовывается в цифровую форму с временными интервалами Δt, начиная с момента выстрела t0, и фиксируется последовательность цифровых значений сигналов Ui (t0+Δt);
- одновременно с преобразованием сигнала в цифровую форму, сигнал дифференцируют и определяют моменты времени tiэкс, когда сигнал имеет экстремальное значение dU(t)/dt=0 (максимальное или минимальное);
- фиксируют моменты времени tiэкс, а также абсолютные значения экстремальных сигналов  фиг. 3;
фиг. 3;
- сохраняют в оперативной памяти цифровые значения сигналов и времена их преобразования;
- разбивают переменную составляющую сигнала Ui(t0+Δt) по оси времени на четыре участка i=1, 2, 3, 4, расположенных между экстремальными значениями сигнала, соответствующих углам;
- между плоскостями поляризации поляризатора и анализатора ϕ=90°, 180°, 270°, 360°;
- при досылке снаряда в орудие, начальный угол между плоскостями поляризации поляризатора и анализатора случаен и равен ϕJ(t)=ϕн, фиг. 3;
- по значениям сигналов Ui(t) и модулей экстремальных сигналов  рассчитывают текущие углы поворота снаряда ϕi(t) на i-х участках углов поворота снаряда:
рассчитывают текущие углы поворота снаряда ϕi(t) на i-х участках углов поворота снаряда:
- положение снаряда по оси канала ствола в сечении Lj при угле ϕi(t) и длине нарезов ствола Ln составит:
- поступательная скорость снаряда Vj в сечении Lj в момент времени t будет:
 ,
,
- линейное ускорение снаряда в измерительном сечении Lj ствола составит:
 ,
,
- угловые скорости Ω и ускорения ε снаряда j-х измерительных сечений ствола:
Таким образом, использование предлагаемого изобретения позволяет значительно упростить измерительную систему, снизить ее вес, повысить надежность, а также улучшить энергетические характеристики.
Суммарный объем анализатора вместе с отражателем, размещаемых в головной части снаряда, составляет менее 1 см3, а вес не более двух десятков граммов.
Литература
1. Патент RU 2731850 на изобретение, заявка: 2020110859/03 МПК F41F 1/00 (2006.01) опубликован: 08.09.2020 Бюл. №25.
2. Патент RU 2731850 на изобретение, заявка: 2021112927 МПК F41A 21/32 (2006.01) опубликован: 07.11.2022 Бюл. №31.
3. Квасов В.Е. Определение параметров движения снаряда в канале ствола в процессе выстрела методом микроволновой интерферометрии. Дис. канд. техн. наук. - Нижний Тагил: институт испытания металлов, 1986.
4. Поршнев С.В. Радиолокационные методы измерений экспериментальной баллистики. Дис. докт. техн. наук. - Нижний Тагил: государственный педагогический институт, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗАЦИОННАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА ПО СТВОЛУ НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2023 |
|
RU2805642C1 |
| ПОЛЯРИЗАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА НАРЕЗНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2022 |
|
RU2798441C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ АРТИЛЛЕРИЙСКОГО СНАРЯДА С ДИСТАНЦИОННЫМ ПОДРЫВОМ В ВОЗДУХЕ | 2022 |
|
RU2816756C1 |
| АРТИЛЛЕРИЙСКИЙ СНАРЯД С СИСТЕМОЙ УПРАВЛЕНИЯ ДИСТАНЦИОННОГО ПОДРЫВА | 2022 |
|
RU2797820C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2780667C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ СНАРЯДА НА ЭТАПЕ ВНУТРЕННЕЙ БАЛЛИСТИКИ | 2021 |
|
RU2793829C2 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2757929C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ ВЫСОКОСКОРОСТНЫХ СНАРЯДОВ ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2022 |
|
RU2790640C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2715994C1 |
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОННЫЙ ВЗРЫВАТЕЛЬ ДЛЯ МЕЛКОКАЛИБЕРНЫХ БОЕПРИПАСОВ | 2019 |
|
RU2767827C2 |
Изобретение относится к поляризационному способу измерения параметров движения снаряда на этапе внутренней баллистики. Для измерения параметров движения снаряда излучают электромагнитную волну на снаряд в направлении, противоположном его движению, принимают отраженное от снаряда излучение, которое линейно поляризуют поляризатором, установленным в головной части снаряда, преобразуют отраженное излучение в электрический сигнал с последующей его обработкой определенным образом, рассчитывают углы поворота снаряда, с помощью которых определяют угловые и линейные скорости и ускорения снаряда в стволе орудия. Обеспечивается увеличение точности измерения линейных, угловых скоростей и ускорений снаряда на этапе внутренней баллистики. 3 ил.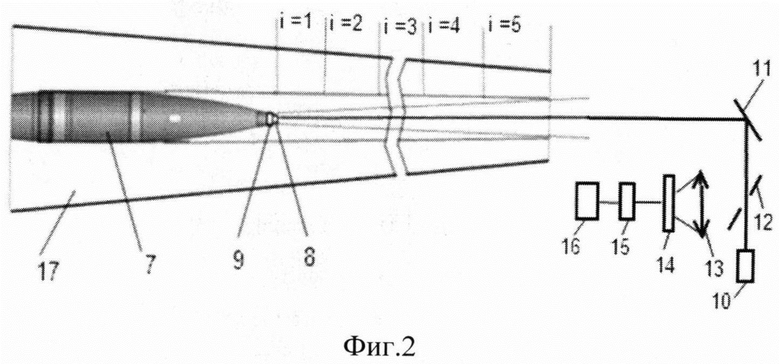
Поляризационный способ измерения параметров движения снаряда на этапе внутренней баллистики, заключающийся в излучении электромагнитной волны на снаряд, в направлении, противоположном его движению, приеме и преобразовании отраженного от снаряда излучения в электрический сигнал, с последующей его обработкой, отличающийся тем, что отраженное от снаряда излучение лазера линейно поляризуют поляризатором, установленным в головной части снаряда, угол поворота снаряда анализируют анализатором плоскости поляризации, преобразуя прошедшее через анализатор излучение в цифровую форму электрического сигнала с заданным временным интервалом, начиная с момента выстрела, дифференцируют сигнал и фиксируют время, когда производные сигнала равны нулю, и модули экстремальных значений сигналов, группируют цифровые значения сигналов по диапазонам, расположенным между экстремальными значениями сигналов, сохраняют сигналы и время их преобразования в оперативной памяти вычислительного устройства и рассчитывают углы поворота снаряда:

по углам поворота снаряда и времени определяют угловые и линейные скорости и ускорения снаряда в стволе орудия с учетом крутизны нарезов ствола орудия, где Ui(t) - цифровые значения электрических сигналов в моменты времени t; i - номер диапазона углов поворота снаряда между экстремальными значениями сигналов; t0 - момент времени выстрела; Δt - заданный временной интервал преобразования электрического сигнала в цифровую форму; tiэкс - время экстремального значения сигнала на i-м диапазоне углов поворота снаряда;  - модули экстремальных значений сигналов в моменты времени tiэкс.
- модули экстремальных значений сигналов в моменты времени tiэкс.
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЛЛИСТИЧЕСКИХ ХАРАКТЕРИСТИК СНАРЯДОВ И ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576333C1 |
| ДОПЛЕРОВСКИЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2019 |
|
RU2727778C1 |
| ЛАЗЕРНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА | 2020 |
|
RU2766535C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАЧАЛЬНОЙ СКОРОСТИ СНАРЯДА ЛАЗЕРНОЙ ВОЛОКОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ | 2020 |
|
RU2757929C1 |
| WO 2015143243 A1, 24.09.2015 | |||
| ОХРАННАЯ СИСТЕМА | 2020 |
|
RU2751756C1 |

