Область техники
Настоящее изобретение относится в целом к электрическим машинам, спроектированным для преобразования механической энергии в электрическую, а также электрической энергии в механическую с помощью электромагнитной индукции. Более конкретно, настоящее изобретение относится к способу направления магнитного моля путем добавления к статору и ротору машины дополнительного самонаправляющегося элемента, названного подвижным статором.
Уровень техники
Каждая вращающаяся электрическая машина имеет ротор и статор, отделенные зазором. Основная часть электрических машин, выпущенных на момент подачи данной заявки на патент, в режиме двигателя использует магнитное поле для передачи энергии между статором и ротором и преобразования электрической энергии в механическое движение. В режиме генератора происходит обратное преобразование: магнитное поле генерирует электрический ток в обмотках. Во всех электрических машинах можно изменять направление преобразования энергии, то есть они могут преобразовывать механическую энергию в электрическую (режим генератора) или электрическую энергию в механическую (режим двигателя). Активными частями машины являются магнитопровод и обмотки, преобразующие энергию. Потери при преобразовании энергии генерируют тепло. Система охлаждения используется для поддержания температуры в допустимых пределах.
При вычислении электродвижущей силы применяется сила Лоренца или сила отталкивания/притяжения между одинаковыми/противоположными магнитными полюсами. В обоих случаях решающее значение имеют направление и величина магнитного поля. Магнитное поле создается постоянными магнитами и/или электромагнитами статора, и ротор находится внутри этого магнитного поля. Все материалы, расположенные между магнитными полюсами статора, влияют на распределение магнитного поля, то есть зазоры и отверстия, ферромагнитные и парамагнитные материалы перенаправляют магнитные линии и образуют области с различным направлением и величиной магнитного поля.
Чтобы достичь максимальной магнитодвижущей силы и, соответственно, максимального крутящего момента и эффективности, магнитное поле должно быть сконцентрировано в области электрического тока, протекающего в обмотках, а провода обмотки должны быть перпендикулярны линиям магнитного поля, то есть в идеале магнитные линии должны быть перпендикулярны поверхности ротора. Аналогичные условия действуют, когда электрическая машина работает как генератор и должна быть достигнута максимальная электродвижущая сила.
Для достижения этих целей в роторе используют комбинации различных материалов, и он сформирован таким образом, что независимо от угла поворота ротора магнитное поле имеет "приемлемую" форму, то есть силовые линии магнитного поля должны быть расположены под углом как как можно ближе к 90° относительно обмоток ротора. Это серьезная проблема, потому что «нечувствительность» магнитного поля к углу вращения ротора и концентрация магнитного поля - взаимно противоречивые задачи, так как усиление магнитного поля в некоторых областях происходит за счет его ослабления в смежных областях, и эти области вращаются вместе с ротором.
Вращение магнитопровода (как части ротора) приводит к возникновению вихревых токов в магнитопроводе. Чтобы смягчить эту проблему, роторы изготавливают из металлических листов (пластин), прессованного ферритового порошка или делают полыми (например, приводной двигатель постоянного тока с полым немагнитным якорем). Это увеличивает себестоимость двигателя, поскольку усложняет изготовление ротора. Генерируемые токи зависят от величины изменения магнитного поля: увеличение скорости вращения приводит к повышенным потерям и перегреву, что ограничивает рабочий диапазон, то есть максимально допустимую скорость вращения машины. Из-за этих потерь эффективность падает с увеличением скорости вращения машины. Нагрев вызывает деформацию ротора, что еще больше ухудшает параметры машины. В случае двигателя с полым немагнитным якорем рассеяние магнитного поля сильно ухудшает характеристики двигателя, и такие двигатели используются только тогда, когда требуется быстрое время отклика. Двигатель постоянного тока с полым немагнитным якорем считается одним из самых быстрых с постоянной времени в несколько миллисекунд, поскольку ротор имеет небольшую массу, малую инерцию и небольшую постоянную времени.
Краткое описание изобретения
Цель настоящего изобретения - создать электрическую машину, которая устраняет вышеупомянутые недостатки предшествующего уровня техники, и, в частности, создать эффективную электрическую машину, в которой снижено рассеяние магнитного поля, генерирование вихревых волн в магнитопроводе и нагрев ротора и, соответственно, снижаются потери и повышается КПД машины.
Существующие электрические машины состоят, как правило, из двух частей, которые двигаются относительно друг друга. Одна часть крепится к корпусу машины и называется СТАТОР. Другая часть движется относительно статора и называется РОТОР, в которой встроены магнитные элементы, такие как постоянные магниты, или электрические обмотки. Ротор прикреплен к валу машины, который благодаря подшипникам может свободно вращаться. Между статором и ротором есть зазор. Передача энергии между статором и ротором обеспечивается за счет магнитного поля, создаваемого машиной.
Настоящее изобретение добавляет к машине третью часть магнитопровода, которая может свободно вращаться как по отношению к статору, так и к ротору. Упомянутая третья часть в этой заявке называется ПОДВИЖНЫЙ СТАТОР.
Согласно настоящему изобретению, электрическая машина содержит неподвижный статор и подвижный ротор, прикрепленный к валу с возможностью свободного вращения относительно статора. Электрическая машина использует магнитную индукцию для передачи энергии между статором и ротором. Машина также включает в себя по меньшей мере один подвижный статор, способный ориентироваться на магнитное поле, создаваемое машиной; по меньшей мере один подвижный статор выполнен по меньшей мере частично из ферромагнитных материалов и установлен с возможностью свободного вращения как относительно неподвижного статора, так и относительно ротора. Ротор расположен между неподвижным статором и по меньшей мере одним подвижным статором.
По меньшей мере один подвижный статор изготавливается такой формы, чтобы направлять магнитные линии, генерируемые магнитным полем статора, так чтобы магнитные линии находились под углом максимально близким к 90° относительно обмоток ротора. По меньшей мере один подвижный статор ориентирован в направлении полюсов магнитного поля, создаваемого статором, как стрелка компаса ориентирована в направлении магнитного поля Земли. Поскольку подвижный статор не движется относительно магнитного поля, его ферромагнитный материал намагничивается и становится слабым магнитом, что приводит к усилению магнитного поля и улучшает ориентацию подвижного статора. Когда ферромагнитный материал ротора существующих машин намагничивается и превращается в слабый магнит, ротор стремится оставаться ориентированным в направлении магнитных линий, и часть генерируемой магнитодвижущей силы должна преодолевать это сопротивление, что приводит к уменьшению КПД. Подвижный статор всегда остается в одном и том же положении относительно магнитного поля, создаваемого статором, и необходимость в подвижном статоре проводить магнитное поле во всех направлениях устраняется. Форма подвижного статора более простая и легкая в изготовлении. Для изготовления ротора вместе с подвижным статором требуется меньше материала по сравнению с ротором существующих машин, и машина становится более легкой по весу. Вихревые токи не возникают в подвижном статоре, поскольку он неподвижен по отношению к магнитному полю, создаваемому статором, поэтому его не нужно делать из пластин или использовать другие методы для уменьшения нагрева, потерь от вихревых токов и зависимости нагрева от скорости вращения машины. Ферромагнитные материалы намагничиваются, когда их домены ориентированы в направлении магнитных линий. Поскольку подвижный статор неподвижен по отношению к магнитному полю, создаваемому статором, исключается переориентация доменов, потеря энергии, необходимой для процесса, и не выделяется тепло, как это происходит при повторном намагничивании.
В одном варианте осуществления ферромагнитный материал в упомянутом по меньшей мере одном подвижном статоре образует тело, проходящее через геометрическую ось упомянутого по меньшей мере одного подвижного статора и имеющее в поперечном сечении удлиненный профиль, проходящий между двумя диаметрально противоположными периферийными зонами указанного по меньшей мере одного подвижного статора.
Между ротором и упомянутым по меньшей мере одним подвижным статором имеется зазор. В одном варианте осуществления упомянутый по меньшей мере один подвижный статор установлен на валу машины с помощью подшипников и может свободно вращаться вокруг оси вращения ротора. Таким образом, по меньшей мере один подвижный статор может изменять свое положение как относительно ротора, так и относительно статора. Ротор машины перемещается между двумя статорами: неподвижным и подвижным.
В зависимости от типа электрической машины упомянутый по меньшей мере один подвижный статор может вращаться или не вращаться относительно корпуса машины. Например, в коллекторном двигателе постоянного тока подвижный статор остается неподвижным, и на него влияет смещение магнитного поля, создаваемого током в обмотках ротора, но методы, улучшающие характеристики двигателя и предотвращающие образование искр, влияют только на положение равновесия подвижного статора, но не на его угловую скорость, которая будет равна нулю после достижения заданного режима. В асинхронном электродвигателе подвижный статор вращается с угловой скоростью магнитного поля, создаваемого обмотками статора, то есть быстрее, чем ротор, и после достижения заданного режима (постоянное вращение магнитного поля, создаваемого обмотками статора), подвижный статор будет оставаться неподвижным относительно магнитного поля статора.
Предпочтительно, ротор является полым, и внутри него расположен по меньшей мере один дополнительный подвижный статор с возможностью соосного вращения.
В одном варианте осуществления ротор представляет собой полый цилиндр, расположенный между статором и упомянутым по меньшей мере одним подвижным статором. В качестве альтернативы ротор может представлять собой полый конус, расположенный между статором и упомянутым по меньшей мере одним подвижным статором. В качестве альтернативы ротор может представлять собой комбинацию полого цилиндра и полого конуса, например, цилиндр со скошенной кромкой на обоих концах, образующий два конуса, и цилиндр, склеенный вместе.
В одном варианте осуществления электрической машины упомянутый по меньшей мере один дополнительный подвижный статор установлен на подшипниках на валу с возможностью свободного вращения. В качестве альтернативы, упомянутый по меньшей мере один дополнительный подвижный статор может быть установлен на подшипниках непосредственно на внутренней поверхности ротора с возможностью свободного вращения.
В предпочтительном варианте осуществления ферромагнитный материал в упомянутом по меньшей мере одном подвижном статоре образует два или более тел на периферии подвижного статора, идентичных по форме и расположенных симметрично относительно оси вращения.
Предпочтительно, чтобы ферромагнитная часть указанного по меньшей мере одного подвижного статора по меньшей мере частично была выполнена из постоянных магнитов. Еще более предпочтительно, чтобы ферромагнитная часть упомянутого по меньшей мере одного подвижного статора полностью была выполнена из постоянных магнитов.
Возможно, что упомянутый по меньшей мере один подвижный статор частично изготовлен из парамагнитных материалов в областях, где он не должен проводить магнитное поле, вне зон из ферромагнитного материала.
В одном варианте статоры имеют поперечное сечение с осевой симметрией относительно оси вращения машины и, соответственно, создают магнитное поле с осевой симметрией относительно оси вращения машины. В качестве альтернативы статоры могут быть расположены так, чтобы генерировать асимметричное магнитное поле.
Статоры могут быть расположены только в одной части периферии ротора машины.
Также электрическая машина может иметь более двух магнитных полюсов.
Количество полюсов электрической машины может быть нечетное.
В целом, использование ферромагнитных материалов для изготовления подвижного статора упрощает конструкцию машины и снижает потери. Эксплуатационные характеристики улучшаются, но существенно не отличаются от характеристик существующих машин. При использовании постоянных магнитов в подвижном статоре величина магнитного поля, генерируемого в области ротора, увеличивается, поскольку оно представляет собой векторную сумму магнитных полей статора и постоянных магнитов подвижного статора. Таким образом, крутящий момент электрической машины увеличивается, поскольку сила Лоренца и, следовательно, выходная мощность пропорциональны величине магнитного поля в области обмоток ротора.
Подвижный статор, согласно изобретению, концентрирует и формирует магнитное поле В, так что магнитные линии почти перпендикулярны обмоткам ротора. Подвижный статор не вращается относительно магнитного поля неподвижного статора, и магнитное поле в нем не изменяется, отсутствует непрерывное перемагничивание, устраняется магнитный гистерезис и не образуются вихревые токи, за счет чего снижаются потери и нагрев машины.
Описание фигур
Более подробно, электрическая машина согласно изобретению проиллюстрирована предпочтительными вариантами осуществления, приведенными в качестве ничем не ограниченных примеров осуществления изобретения, со ссылкой на прилагаемые фигуры, на которых:
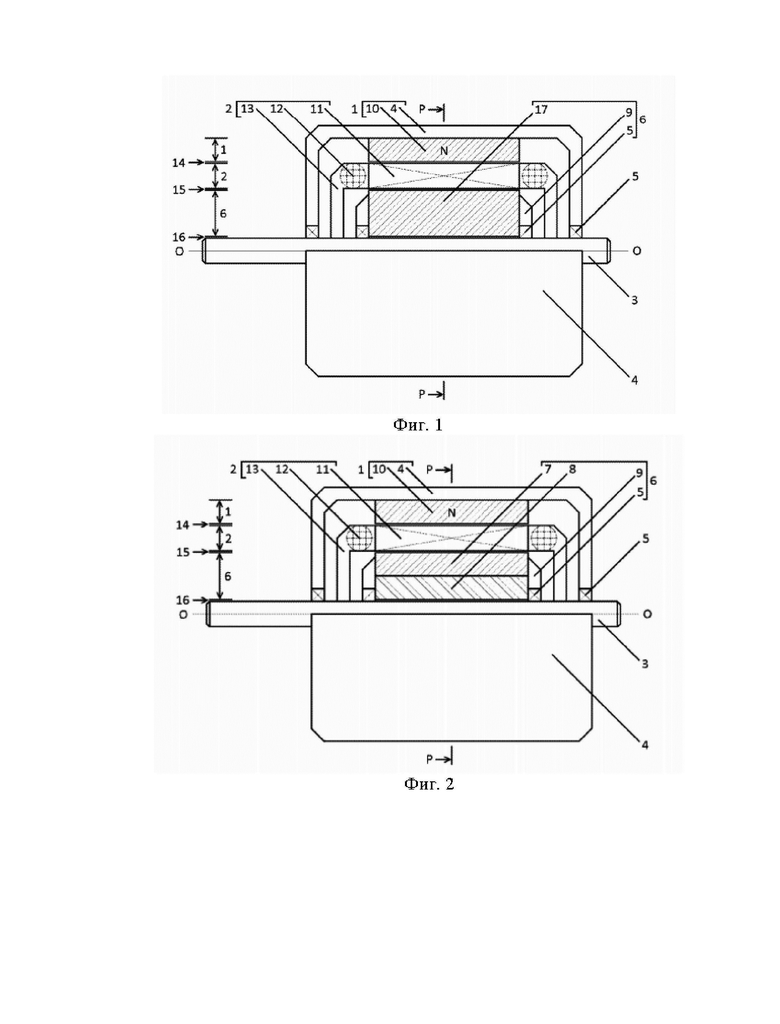
На Фиг. 1 показан упрощенный продольный вид сверху коллекторного электродвигателя постоянного тока с однородным подвижным статором.
На Фиг. 2 показан упрощенный продольный вид сверху коллекторного электродвигателя постоянного тока с подвижным статором, состоящим из внутренней части и внешнего слоя, изготовленных из разных материалов.
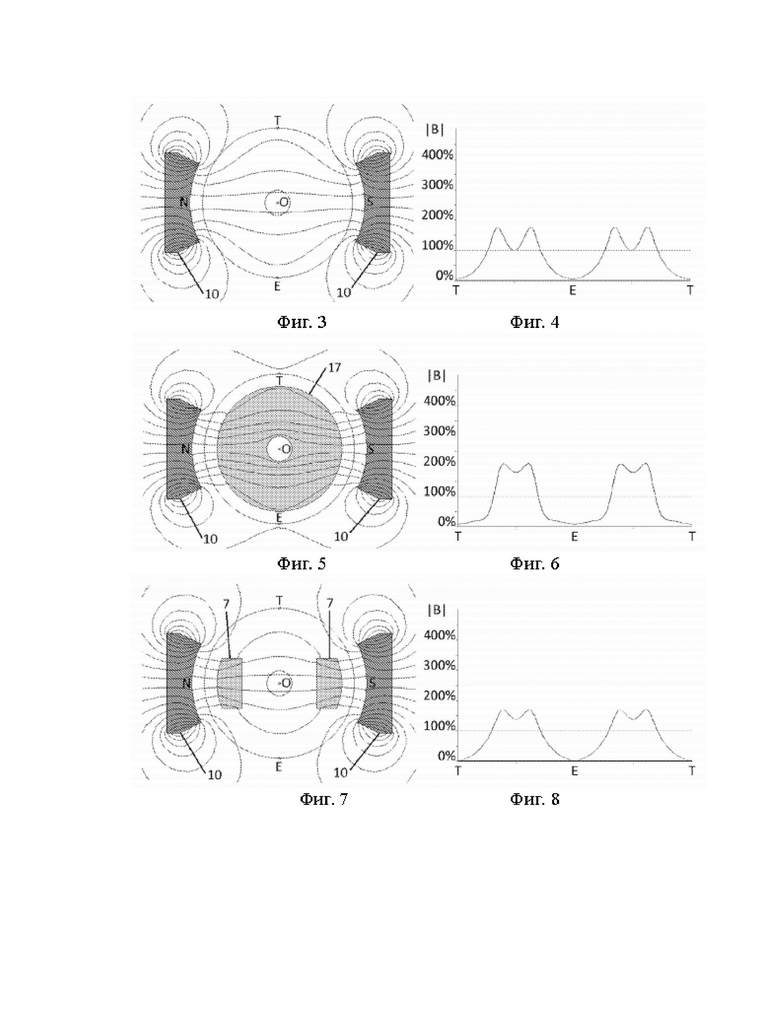
На Фиг.3 показано поперечное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S (отмечены только полюсы со стороны ротора). Подвижный статор, изготовленный из парамагнитного материала, не показан, чтобы показать форму магнитного поля, создаваемого двумя магнитами N и S неподвижного статора.
На Фиг. 4 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 3.
На Фиг. 5 показано поперечное сечение машины по Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный ферромагнитный статор имеет форму однородного цилиндра.
На Фиг. 6 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 5.
На Фиг. 7 показано поперечное сечение машины на Фиг. 2 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор состоит из двух частей: ферромагнитной и внутренней парамагнитной.
На Фиг. 8 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 7.
На Фиг. 9 показано поперечное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из плотного ферромагнитного материала.
На Фиг. 10 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 9.
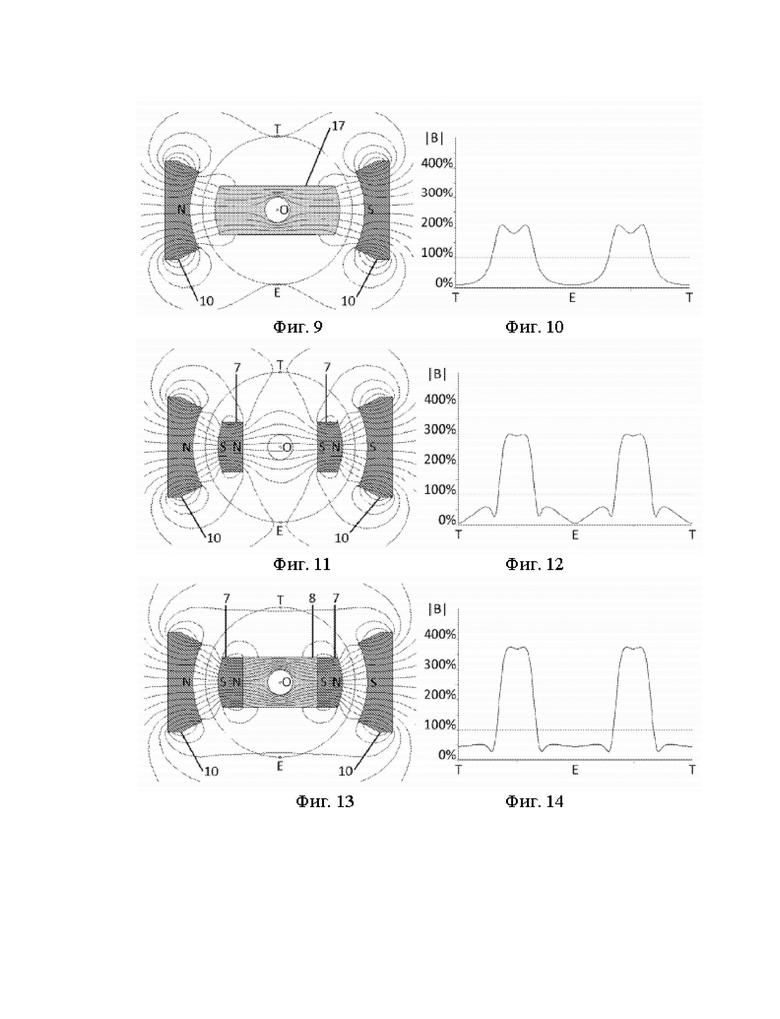
На Фиг. 11 показано поперечное сечение машины на Фиг. 2 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор состоит из двух частей: постоянных магнитов и внутренней парамагнитной части.
На Фиг. 12 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 11.
На Фиг. 13 показано поперечное сечение машины на Фиг. 2 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор состоит из двух частей: постоянных магнитов и внутренней ферромагнитной части.
На Фиг. 14 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 13.
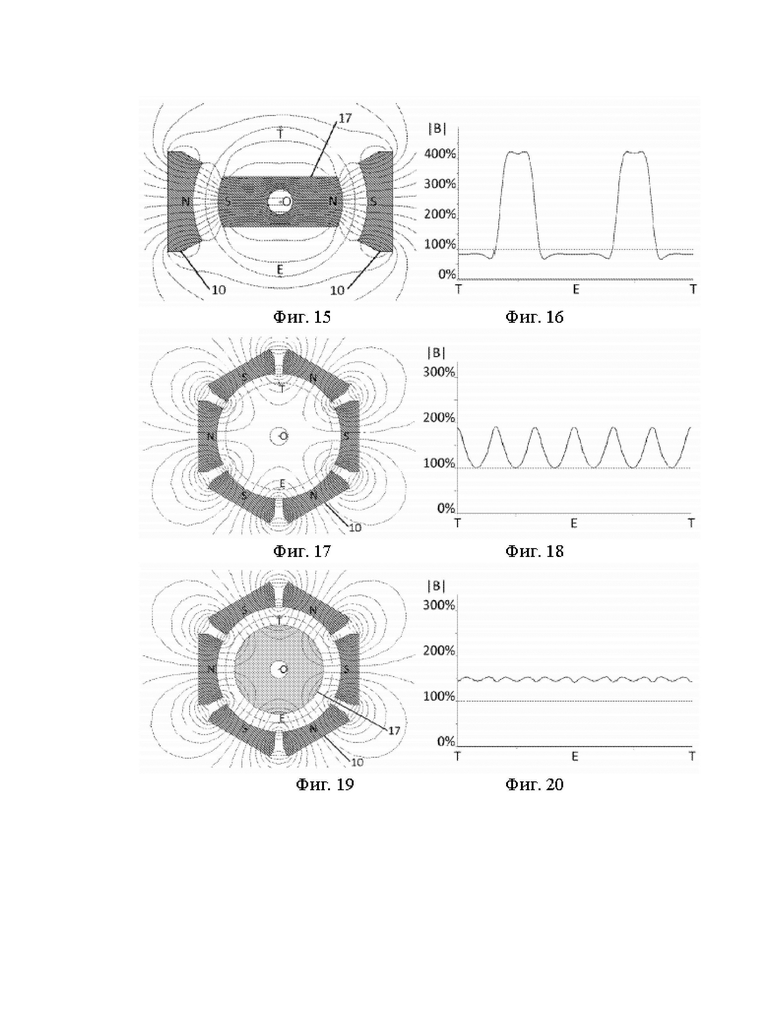
На Фиг. 15 показано поперечное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из цельного постоянного магнита.
На Фиг. 16 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 15.
На Фиг.17 показано поперечное сечение машины на Фиг.1 со статором, представленным шестью постоянными магнитами N и S. Подвижный статор из парамагнитного материала не показан, чтобы показать форму магнитного поля, создаваемого шестью магнитами N и S неподвижного статора.
На Фиг. 18 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 17.
На Фиг. 19 показано поперечное сечение машины по Фиг.1 со статором, представленным шестью постоянными магнитами N и S. Подвижный ферромагнитный статор имеет форму однородного цилиндра.
На Фиг. 20 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 19.
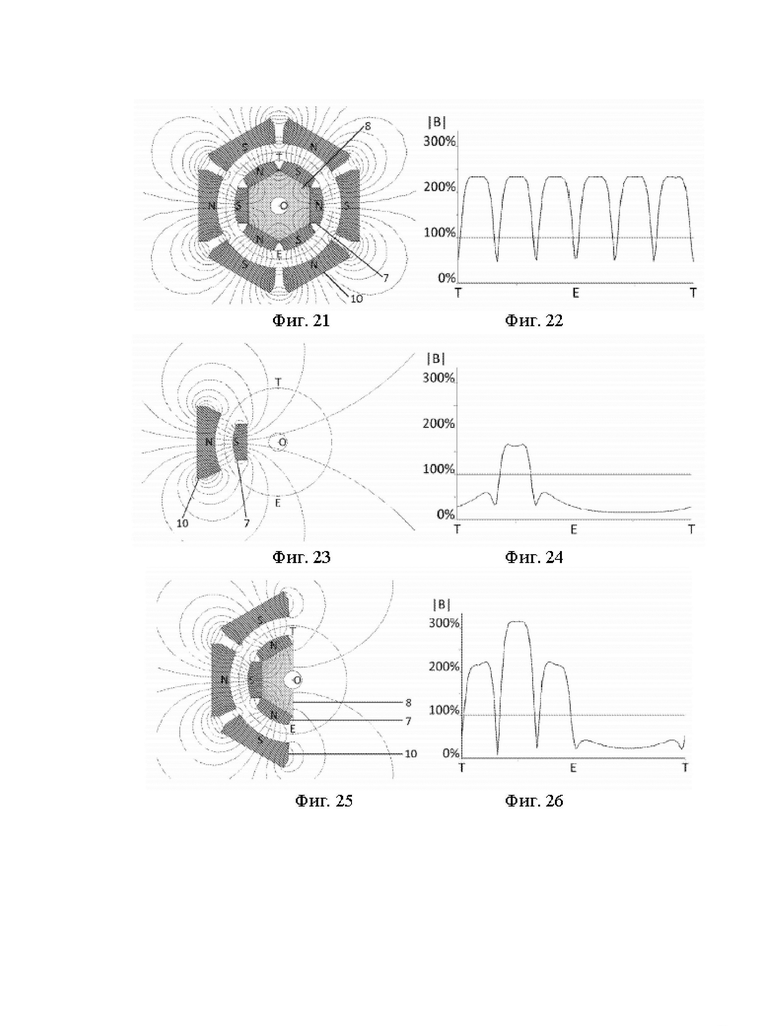
На Фиг. 21 показано поперечное сечение машины на Фиг. 2 со статором, представленным шестью постоянными магнитами N и S. Подвижный статор состоит из двух частей: постоянных магнитов и ферромагнитной части.
На Фиг. 22 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 21.
На Фиг. 23 показано поперечное сечение асимметричной машины, аналогичной машине на Фиг. 21, со статором, представленным только одним постоянным магнитом N. Подвижный статор состоит из двух частей: постоянного магнита и ферромагнитной части.
На Фиг. 24 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 23.
На Фиг. 25 показано поперечное сечение асимметричной машины, аналогичной машине на Фиг. 21, со статором, представленным только тремя постоянными магнитами N и S. Подвижный статор состоит из двух частей: постоянных магнитов и ферромагнитной части.
На Фиг. 26 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 25.
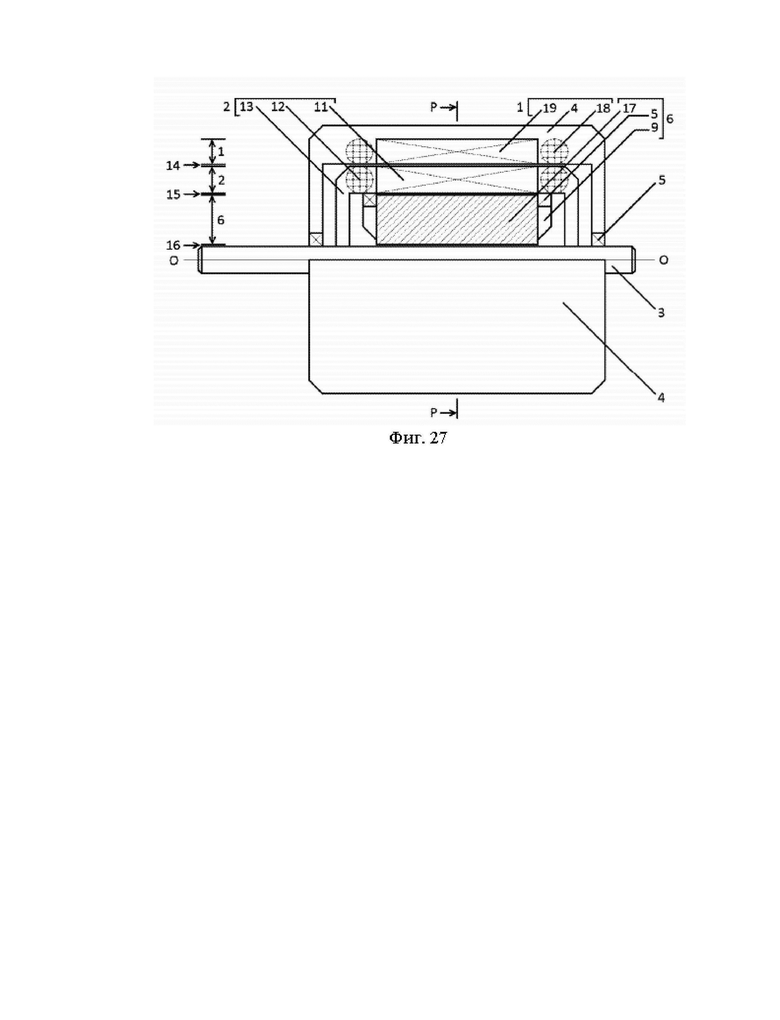
На Фиг. 27 показан упрощенный продольный вид сверху асинхронного электродвигателя с однородным подвижным статором.
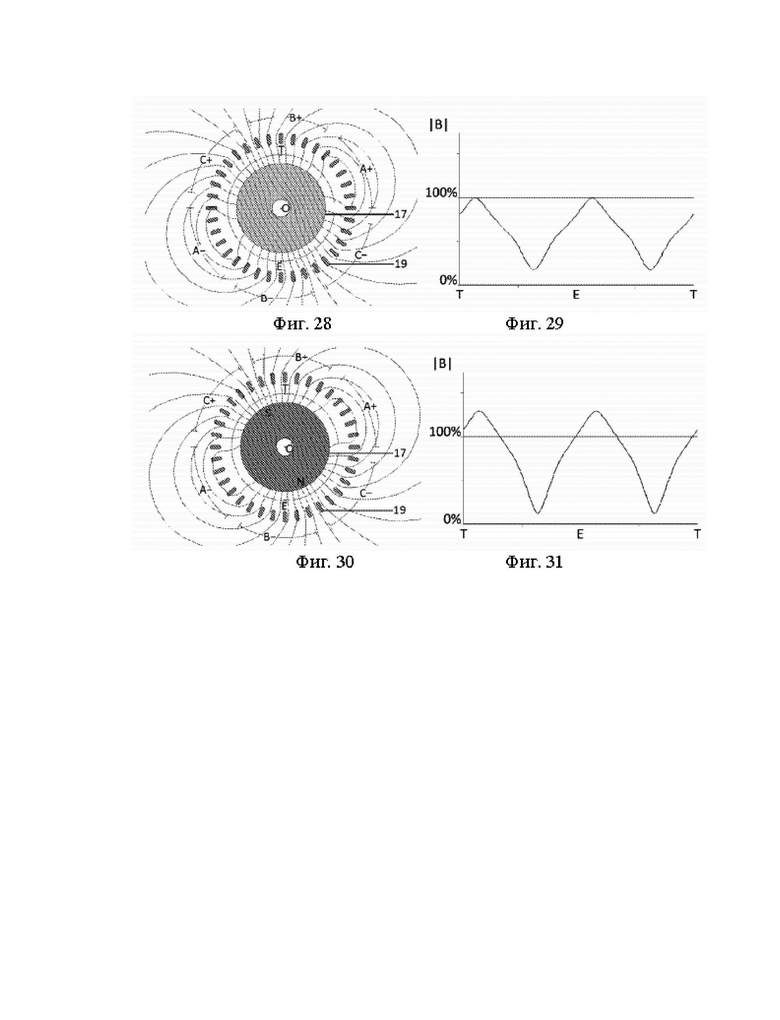
На Фиг. 28 показано поперечное сечение машины, изображенной на Фиг. 27, со статором, представленным обмотками трех фаз, смещенными на 120°. Подвижный ферромагнитный статор имеет форму однородного цилиндра.
На Фиг. 29 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 28.
На Фиг. 30 показано поперечное сечение машины, изображенной на Фиг. 27, со статором, представленным обмотками трех фаз, смещенными на 120°. Подвижный статор представляет собой постоянный магнит в виде однородного цилиндра.
На Фиг. 31 показана величина магнитного поля в контуре Т-Е-Т машины, показанной на Фиг. 30.
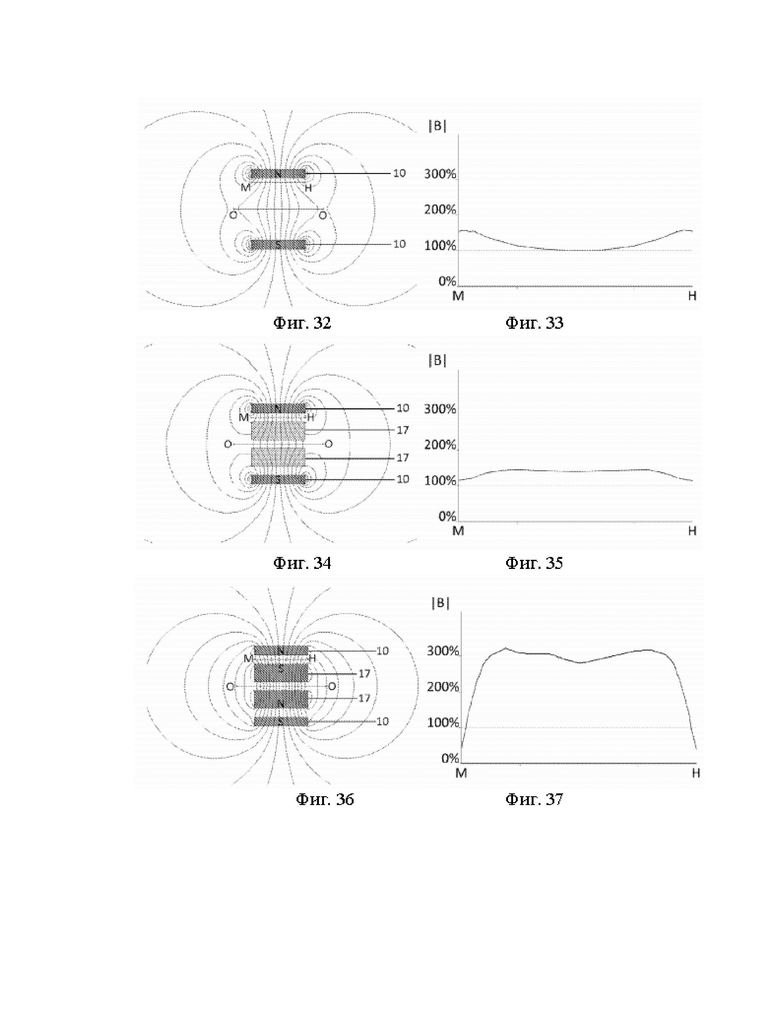
На Фиг.32 показано продольное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор из парамагнитного материала не показан, чтобы показать форму магнитного поля, создаваемого двумя магнитами N и S неподвижного статора.
На Фиг. 33 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 32.
На Фиг. 34 показано продольное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из ферромагнитного материала.
На Фиг. 35 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 34.
На Фиг. 36 показано продольное сечение машины на Фиг.1 со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из постоянных магнитов.
На Фиг. 37 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 36.
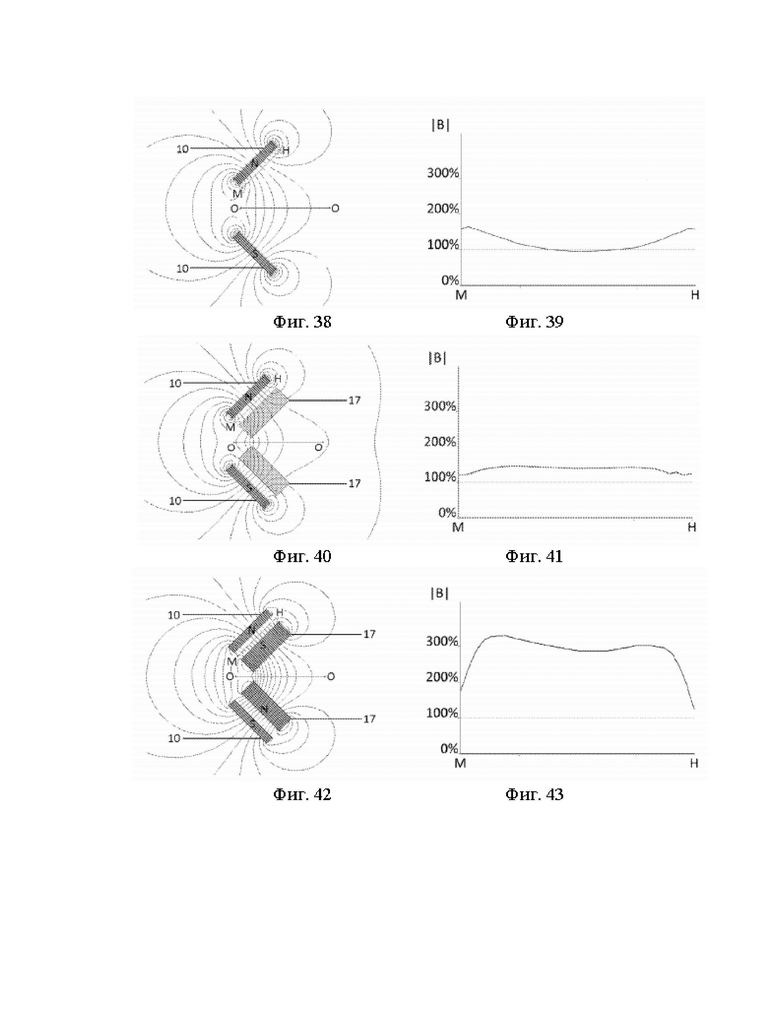
На Фиг. 38 показано продольное сечение конической машины со статором, представленным двумя постоянными магнитами N и S. Подвижный статор из парамагнитного материала не показан, чтобы показать форму магнитного поля, создаваемого двумя магнитами N и S неподвижного статора.
На Фиг. 39 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 38.
На Фиг. 40 показано продольное сечение конической машины со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из ферромагнитного материала.
На Фиг. 41 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 40.
На Фиг. 42 показано продольное сечение конической машины со статором, представленным двумя постоянными магнитами N и S. Подвижный статор изготовлен из постоянных магнитов.
На Фиг. 43 показана величина магнитного поля вдоль линии M-H машины, показанной на Фиг. 42.
На всех фигурах отдельные части не закрашены, чтобы лучше видеть магнитные линии. Серым цветом показаны части неподвижного и подвижного статоров, которые создают магнитное поле или влияют на него. Темно-серые части создают магнитное поле, а светло-серые части только перенаправляют его.
На всех фигурах одни и те же геометрические размеры используются для правильного сравнения результатов моделирования в статическом положении изображенных частей машины.
Подробное описание вариантов осуществления изобретения
Настоящее изобретение применимо к различным типам электрических машин, работающих в режиме генератора или двигателя. Например, электродвигатели постоянного тока, асинхронные электродвигатели и т.д. Несмотря на то, что изобретение применимо к различным типам электродвигателей и генераторов, на чертежах рассматриваются коллекторные двигатели постоянного тока и асинхронные электродвигатели, чтобы объяснить концепцию, которая одинакова для всех электрических машин. Прилагаемые фигуры не охватывают/не исчерпывают все возможные конфигурации.
На Фиг. 1 и 2 показан упрощенный продольный вид сверху коллекторного двигателя постоянного тока. Показана только конструкция статоров и ротора. Коммутаторы на рисунках не показаны, так как не имеют прямого отношения к изобретению. Постоянные магниты 10 неподвижного статора 1 прикреплены к корпусу 4 двигателя (крепежные детали не показаны).
Подшипники 5 позволяют валу 3 свободно вращаться вокруг оси O-O. Полый ротор 2 прикреплен крепежными деталями 13 к валу 3 и вращается вместе с ним. Подвижный статор 6 установлен внутри ротора 2. На Фиг.1 подвижный статор 6 выполнен из однородного материала 17, тогда как подвижный статор 6 на Фиг.2 состоит из внешней части 7 и внутренней части 8, чтобы показать, что подвижный статор 6 может быть выполнен из различных материалов. Подвижный статор 6 отделен от вала 3 зазором 16. Крепежные детали 9 и подшипники 5 позволяют подвижному статору 6 свободно вращаться вокруг вала 3 двигателя. Слева на Фиг. 1 и 2 показаны области, занятые отдельными частями машины: валом 3, подвижным статором 6, ротором 2 и неподвижным статором 1, которые представляют собой вложенные цилиндры, разделенные зазорами. Ротор 2 отделен от неподвижного статора 1 и подвижного статора 6 зазорами 14 и 15. Таким образом, неподвижный статор 1, ротор 2 и подвижный статор 6 могут свободно вращаться относительно друг друга. Обмотки 11 ротора размещены между магнитами статора 1 и внешней частью 7 подвижного статора 6. Концевая обмотка 12 и крепежные детали 13 ротора 2 размещены вне области, находящейся между магнитами 20 статора 1 и подвижным статором 6.
На Фиг. 3, 5, 9 и 15 показаны поперечные сечения в плоскости P-P различных моделей двухполюсного двигателя постоянного тока, показанного на Фиг. 1. На Фиг. 7, 11 и 13 показаны поперечные сечения в плоскости P-P различных моделей двухполюсного двигателя постоянного тока, показанного на Фиг. 2. Показаны только два магнита 10 статора 1. Ротор 2 не показан, чтобы магнитные линии были лучше видны. Вал 3 машины вместе с ротором 2 вращаются вокруг оси О-О, которая перпендикулярна показанной плоскости P-P. Подвижный статор 6 может быть изготовлен из различных материалов: парамагнитных (в виде воздуха), ферромагнитных (в виде анодного железа) и постоянных магнитов того же типа, что и магниты 10 неподвижного статора 1.
На Фиг. 4, 6, 8, 10, 12, 14 и 16 показана величина магнитного поля в середине канала ротора между магнитами статора 1 и подвижного статора 6. На графиках показано безразмерное магнитное поле вдоль оси контура T-E-T, при этом предполагается, что поле в центре магнитов 10, где магнитные линии перпендикулярны контуру T-E-T, для подвижного парамагнитного статора 6 равно 1,0, то есть 100%. Когда в подвижном статоре 6 используются парамагнитные и ферромагнитные материалы, магнитное поле не увеличивается, а только перенаправляется. Когда в подвижном статоре 6 используются постоянные магниты, магнитное поле увеличивается на величину магнитного поля, создаваемого этими магнитами. В зависимости от конструкции машины увеличение будет разным и зависит от соотношения магнитных полей, создаваемых статором 1 и подвижным статором 6. В приведенных в качестве примера вариантах осуществления общее магнитное поле варианта осуществления двигателя постоянного тока на Фиг. 15 на почти 300% сильнее по сравнению с вариантами осуществления без дополнительных магнитов, то есть двигатель на Фиг. 15 в 2-4 раза более мощный, чем в случае вариантов осуществления, показанных на фиг. 3, 5, 7 и 9. Увеличение за счет использования дополнительных постоянных магнитов в подвижных статорах 6 зависит от конкретных параметров машины и не может быть обобщено для всех типов машин, имеющих разные размеры, конструкцию и использующих различные материалы. Общим является увеличение магнитного поля из-за добавления дополнительного магнитного поля, создаваемого постоянными магнитами подвижных статоров 6.
На Фиг. 17 и 19 показаны поперечные сечения в плоскости P-P различных моделей шестиполюсного двигателя постоянного тока, показанного на Фиг. 1. На Фиг. 21 показано поперечное сечение в плоскости P-P шестиполюсного двигателя постоянного тока, изображенного на Фиг. 2. Показаны только шесть магнитов 10 статора 1. Ротор 2 не показан, чтобы магнитные линии были лучше видны. Вал 3 машины вместе с ротором 2 вращаются вокруг оси О-О, которая перпендикулярна показанному сечению P-P. Приведенные варианты осуществления двух- и шестиполюсных двигателей постоянного тока показывают, что полюса неподвижного статора 1 и подвижного статора 6 должны совпадать как по количеству, так и по расположению полюсов, поскольку противоположные полюса находятся друг напротив друга. Подвижный статор 6 ориентирован относительно магнитного поля неподвижного статора 1 и, следовательно, подвижный статор 6 всегда находится в «правильном» положении без необходимости использовать какую-либо систему управления или механическую передачу. Подвижный статор 6 изготовлен из различных материалов: парамагнитных (представлены воздухом), ферромагнитных (представлены анодным железом) и постоянных магнитов того же типа, что и магниты 10 неподвижного статора 1.
На Фиг. 18, 20 и 22 показана величина магнитного поля в середине канала ротора между магнитами статора 1 и подвижного статора 6. На графиках показано безразмерное магнитное поле вдоль оси контура T-E-T, при этом предполагается, что поле в центре магнитов 10, где магнитные линии перпендикулярны контуру T-E-T, для подвижного парамагнитного статора 6 равно 1,0, то есть 100%. Когда в подвижном статоре 6 используются парамагнитные и ферромагнитные материалы, магнитное поле не увеличивается, а только перенаправляется, а когда в подвижном статоре 6 используются постоянные магниты, магнитное поле увеличивается на величину магнитного поля, создаваемого этими магнитами. В зависимости от конструкции машины увеличение будет разным и зависит от соотношения магнитных полей, создаваемых статором 1 и подвижным статором 6.
В приведенных в качестве примера вариантах осуществления общее магнитное поле варианта двигателя постоянного тока на Фиг. 21 на почти 50-120% сильнее по сравнению с вариантами без дополнительных магнитов, т. е. двигатель на Фиг. 21 в 1,5-2,2 раза более мощный, чем в случае вариантов, показанных на Фиг. 17 и 19. Увеличение за счет использования дополнительных постоянных магнитов в подвижных статорах 6 зависит от конкретных параметров машины и не может быть обобщено для всех типов машин, имеющих разные размеры, конструкцию и использующих разные материалы.
Подвижный статор 6 обычно имеет осевую симметрию относительно оси вращения ротора 2 машины, поскольку, если центр масс подвижного статора 6 не лежит на оси вращения, положение равновесия подвижного статора 6 будет зависят не только от магнитного поля, создаваемого статором 1 электрической машины, но также будут зависеть от силы притяжения и других сил и ускорений, которым подвергается машина, то есть от ориентации машины. Магнитное поле, создаваемое статором 1, притягивает подвижный статор 6. Когда статоры 1 и 6 симметричны, силы притяжения между магнитами статора взаимно уравновешены, и результирующая сила равна нулю, то есть создается только крутящий момент. Кроме того, подвижный статор 6 вращается вокруг вала 3 машины, и в случае дисбаланса подшипники будут изнашиваться неравномерно и, следовательно, будут иметь меньший срок службы (эксплуатации). Следовательно, варианты осуществления, подобные показанным на Фиг. 23 и 25, могут применяться, когда окружающая среда накладывает ограничения, такие как наличие сильных внешних электромагнитных полей, высокая температура (например, работа возле металлургической печи), ограниченное пространство (невозможность симметрично расположить стационарный статор 1 из-за недостатка места для установки), или когда необходимо уменьшить электромагнитные помехи, создаваемые машиной (при отсутствии статоров магнитное поле намного слабее). На Фиг. 23 и 25 показаны поперечные сечения в плоскости P-P различных асимметричных моделей двигателя постоянного тока, изображенного на Фиг.1. Показаны только магниты 10 статора 1. Ротор 2 не показан, чтобы магнитные линии были лучше видны. Вал 3 машины вместе с ротором 2 вращаются вокруг оси О-О, которая перпендикулярна показанному сечению P-P. Подвижный статор 6 изготовлен из постоянных магнитов того же типа, что и магниты 10 неподвижного статора 1. Размеры и материалы деталей такие же, как и в варианте осуществления на Фиг.21. На Фиг. 24 и 26 показана величина магнитного поля в середине канала ротора между магнитами статора 1 и подвижного статора 6. На графиках показано безразмерное магнитное поле вдоль контура T-E-T, так как предполагается, что поле в середине магнитов 10 неподвижного статора 1 двигателя на Фиг. 17 равно 100%. Ротор 2 может быть даже частичным, если нет необходимости делать полные обороты. На Фиг. 27 показан упрощенный продольный вид сверху асинхронного электродвигателя с коротко-замкнутым ротором (типа "беличье колесо"). Показана только конструкция статоров и ротора. Обмотки 19 неподвижного статора 1 прикреплены к корпусу 4 двигателя. Подшипники 5 позволяют валу 3 свободно вращаться вокруг оси O-O. Полый ротор 2 прикреплен крепежными деталями 13 к валу 3 и вращается вместе с ним. Внутри ротора 2 расположен однородный подвижный статор 6, состоящий из магнитопровода 17 и крепежных деталей 9. Подвижный статор 6 прикреплен к ротору 2 с помощью крепежных деталей 9 и подшипников 5 и может свободно вращаться вокруг оси вращения О-О двигателя. Подвижный статор 6 отделен от ротора 2 зазором 15. Подвижный статор 6 отделен от вала 3 зазором 16. Слева на Фиг. 27 показаны области, занятые отдельными частями машины: валом 3, подвижным статором 6, ротором 2 и неподвижным статором 1, которые представляют собой вложенные цилиндры, разделенные зазорами. Ротор 2 отделен от неподвижного статора 1 и подвижного статора 6 зазорами 14 и 15. Таким образом, неподвижный статор 1, ротор 2 и подвижный статор 6 могут свободно вращаться относительно друг друга. Обмотки 11 ротора расположены между обмотками статора 1 и подвижного статора 6.
На Фиг. 28 и 30 показаны поперечные сечения в плоскости P-P различных конфигураций асинхронного электродвигателя, показанного на Фиг. 27. Из неподвижного статора 1 показаны только каналы 10 обмотки статора: 36 каналов для трех смещенных на 120° фаз A, B и C обмоток 19 статора, которые создают вращающееся биполярное магнитное поле. Ротор 2 не показан, чтобы магнитные линии были лучше видны. Вал 3 машины вместе с ротором 2 вращаются вокруг оси О-О, которая перпендикулярна показанной плоскости P-P. Подвижный статор 6 может быть изготовлен из различных материалов: ферромагнитных и постоянных магнитов.
На Фиг. 29 и 31 показана величина магнитного поля в середине канала ротора между магнитами неподвижного статора 1 и подвижного статора 6. На графиках показано безразмерное магнитное поле вдоль контура T-E-T, так как предполагается, что поле подвижного ферромагнитного статора 6 равно 1,0, то есть 100%. Когда в подвижном статоре 6 используются постоянные магниты, магнитное поле увеличивается на величину магнитного поля, создаваемого этими магнитами. В зависимости от конструкции машины увеличение будет разным и зависит от соотношения магнитных полей, создаваемых статором 1 и подвижным статором 6.
Тот факт, что магнитное поле создается между неподвижным статором 1 и подвижным статором 6, позволяет машине принимать различные формы, в которых ротор может вращаться в канале, образованном статорами. На Фиг. 32 показан продольный разрез машины, изображенной на Фиг. 1 и 3. На Фиг. 34 показан продольный разрез машины, изображенной на Фиг. 1 и 9. На Фиг. 36 показан продольный разрез машины, изображенной на Фиг. 1 и 15. Показаны только два магнита 10 статора 1. Ротор 2 не показан, чтобы магнитные линии были лучше видны. Вал 3 машины вместе с ротором 2 вращаются вокруг оси О-О. Подвижный статор 6 изготовлен из различных материалов: парамагнитных (в виде воздуха), ферромагнитных (в виде анодного железа) и постоянных магнитов того же типа, что и магниты 10 неподвижного статора 1.
На Фиг. 33, 35 и 37 показана величина магнитного поля в середине канала ротора между магнитами неподвижного статора 1 и подвижного статора 6. На графиках показано безразмерное магнитное поле вдоль линии M-H, при этом предполагается, что поле в центре магнитов 10, где магнитные линии перпендикулярны ротору 2, для подвижного парамагнитного статора 6 равно 1,0, то есть 100%. Когда в подвижном статоре 6 используются парамагнитные и ферромагнитные материалы, магнитное поле не усиливается, а только перенаправляется, а когда в подвижном статоре 6 используются постоянные магниты, магнитное поле увеличивается на величину магнитного поля, создаваемого этими магнитами. В зависимости от конструкции машины коэффициент усиления различается и зависит от соотношения магнитных полей, создаваемых статором 1 и подвижным статором 6. На Фиг. 38, 40 и 42 показаны варианты двигателей, изображенных на Фиг. 32, 34 и 36, при этом ротор, расположенный в канале между статорами, представляет собой полый конус. На Фиг. 39, 41 и 43 показана величина магнитного поля в середине канала ротора между магнитами неподвижного статора 1 и подвижного статора 6. На графиках показано магнитное поле вдоль линии M-H, при этом предполагается, что поле в центре магнитов 10, где магнитные линии перпендикулярны ротору 2, для двигателя на Фиг. 32 равно 1,0, то есть 100%.
Разделение ротора 2 и подвижного статора 6 приводит к ряду эффектов, улучшающих характеристики электрических машин. В варианте осуществления, в котором ротор 2 является полым, а внутри него помещен по меньшей мере один из подвижных статоров 6, масса ротора уменьшается. Это обеспечивает меньшую нагрузку на машину, меньшую инерцию ротора, меньшее время отклика и более легкий запуск машины, то есть достигаются лучшие динамические характеристики, аналогичные для двигателя с полым немагнитным якорем. Магнитное поле образуется в области между статорами 1 и 6, где расположен ротор 2, что позволяет лучше направлять и концентрировать магнитные линии. Когда ротор 2 представляет собой полый цилиндр, вставленный подвижный статор 6 может не иметь цилиндрической формы, потому что направление магнитного поля известно заранее и не должно проводить магнитное поле во всех направлениях, поэтому выступы находятся там, где магнитное поле должно быть сконцентрировано, а полости можно оставить там, где магнитное поле не нужно. Это делает вес машины более легким. В вариантах осуществления двухполюсного двигателя постоянного тока, показанных на Фиг. 1-16, подвижный статор 6 является частью цилиндра, имеющего форму параллелепипеда, поскольку имеются только два полюса магнитного поля статора. Как показано на Фиг. 1, 2 и 17-22, у шестиполюсного двигателя постоянного тока подвижный статор 6 в целом напоминает плоскую зубчатую передачу, где зубцы изготовлены из ферромагнитного материала, а материал в пространстве между зубцами не ферромагнитный или полностью отсутствует. Количество и расположение полюсов постоянных магнитов на подвижных статорах 6 зависит от конструкции неподвижного статора 1, так как в установленном положении напротив каждого полюса магнитного поля неподвижного статора 1 имеется противоположный магнитный полюс подвижного статора 6.
При использовании постоянных магнитов в подвижном статоре 6 магнитное поле в области ротора представляет собой векторную сумму магнитных полей неподвижного статора 1 и подвижного статора 6. В существующих электрических машинах невозможно использовать дополнительные магниты, встроенные в ротор, в пространстве подвижного статора, потому что их магнитное поле будет вращаться вместе с ротором и не будет выровнено с магнитным полем статора, то есть совокупное магнитное поле не только увеличивается и уменьшается за счет магнитного поля дополнительных магнитов, но и будет изменять направление магнитного поля, и оно не будет перпендикулярно обмоткам ротора. Поскольку подвижный статор 6, как и стрелка компаса, всегда одинаково ориентируется на магнитное поле неподвижного статора 1, магниты подвижного статора 6 всегда будут увеличивать совокупное магнитное поле, которому прямо пропорциональна мощность машины. То есть используя те же материалы, машина имеет улучшенные коэффициенты мощности относительно размера и соотношение мощности к весу. Или те же параметры существующих машин могут быть достигнуты за счет использования более слабых и дешевых магнитов, например, путем замены редкоземельных элементов, таких как ниобий.
Подвижный статор 6 самоориентируется в соответствии с магнитными линиями магнитного поля, создаваемого неподвижным статором 1, как стрелка компаса ориентирована в направлении магнитного поля Земли, но в зависимости от типа машины подвижный статор 6 может вращаться или быть неподвижным. Например, в асинхронном электродвигателе подвижный статор 6 вращается с угловой скоростью магнитного поля, создаваемого неподвижным статором 1, то есть быстрее, чем ротор, тогда как в двигателе постоянного тока подвижный статор 6 неподвижен. Независимо от того, вращается ли подвижный статор 6, он не перемещается относительно магнитного поля машины и не перемагничивается, что снижает потери и нагрев машины и увеличивает КПД. Поскольку подвижный статор 6 не перемещается относительно магнитного поля машины, он не генерирует вихревые токи, за счет чего нагрев уменьшается, и машина может работать с более высокой скоростью. Нагрев вызывает деформацию ротора и сокращает срок службы машины. Исключение вихревых токов упрощает конструкцию и производство машины, поскольку не требуются пластины или другие методы, позволяющие избежать вихревых токов, и, таким образом, снижается стоимость машины. Подвижные статоры могут быть изготовлены из различных ферромагнитных материалов, а не только из магнитомягкой стали, поскольку предотвращается повторное намагничивание, а ширина гистерезиса не влияет на потери в машине.
Подвижный статор 6 может иметь различную форму: цилиндрическую, коническую или комбинацию таких форм, - и быть изготовленным из различных материалов, включая постоянные магниты. Подвижный статор 6 может состоять из нескольких частей, каждая из которых пассивно ориентирована относительно магнитного поля, то есть даже без механической связи между ними они будут ориентированы в направлении магнитного поля неподвижного статора 1 и, следовательно, будут образовывать постоянную конфигурацию.
Напряженность магнитного поля зависит от расстояния между статорами 1 и 6, а не от диаметра ротора 2, поскольку оно создается между неподвижным и подвижным статорами, то есть машина может работать даже с неограниченно большим диаметром. Магнитное поле создается между двумя статорами, и можно создавать более сложные формы магнитного поля, потому что предотвращается рассеяние в центральной части существующих в настоящее время машин. Это позволяет использовать даже нечетное количество полюсов, как показано на Фиг. 23 и 25.
Другие факторы могут потребовать использования нескольких подвижных статоров 6. Например, если электрическая машина длинная, ротор 2 должен быть прикреплен к валу 3 в нескольких точках, чтобы избежать вибрации и изгиба вала 3. В этом случае подвижные статоры 6 будут отделены от крепежных деталей 13 ротора, но, будучи ориентированными в направлении магнитного поля статора 1, будут формировать общую конфигурацию одного составного подвижного статора. Такие электрические машины имеют улучшенный аэродинамический профиль и подходят для встраивания в ветряные турбины и самолеты/дроны. Эти последовательно расположенные подвижные статоры 6 могут быть не одного типа, но на одном конце машины они имеют цилиндрическую форму, а на другом конце - коническую, чтобы получить желаемый профиль машины и уменьшить завихрения воздуха.
Квалифицированным специалистам в данной области техники будет очевидно, что возможны различные модификации электрических машин со дополнительным подвижным статором, которые также находятся в пределах объема настоящего изобретения, определенного в прилагаемой формуле изобретения. Все детали машины могут быть заменены технически эквивалентными элементами.
Ссылочные позиции на технические характеристики включены в формулу изобретения исключительно для того, чтобы формула изобретения была более понятной, соответственно, такие ссылочные позиции не накладывают каких-либо ограничений на интерпретацию любого элемента, сопровождающегося для наглядности такими ссылками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГОВЫЙ ПРИВОД ДЛЯ ЛИФТА | 2007 |
|
RU2425791C2 |
| МАГНИТОТЕПЛОВОЕ УСТРОЙСТВО | 2000 |
|
RU2167338C1 |
| УЛУЧШЕННЫЙ ГЕНЕРАТОР НА ПОСТОЯННОМ МАГНИТЕ | 2019 |
|
RU2716815C1 |
| СПОСОБ ПРОСТРАНСТВЕННОГО СЕПАРИРОВАНИЯ МАГНИТНЫХ ПОТОКОВ В ЭЛЕКТРИЧЕСКИХ МАШИНАХ | 2015 |
|
RU2615631C2 |
| Двухпакетная индукторная электрическая машина с комбинированным возбуждением (варианты) | 2018 |
|
RU2696273C1 |
| Бесщеточная электрическая машина постоянного тока дискового типа | 1982 |
|
SU1494877A3 |
| УНИПОЛЯРНАЯ МАШИНА ПОСТОЯННОГО ТОКА С ВЫСОКИМ НАПРЯЖЕНИЕМ | 2011 |
|
RU2471280C1 |
| Гибридная силовая установка | 2018 |
|
RU2671437C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2008 |
|
RU2375806C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТНОГО ПОЛЯ ПРИ ВЗАИМНОМ ПЕРЕМЕЩЕНИИ МАГНИТНЫХ ПОЛЮСОВ | 2014 |
|
RU2568659C1 |
Изобретение относится к электротехнике. Технический результат заключается в повышении КПД и снижении потерь и нагрева электрической машины за счет того, что подвижный статор (6) не вращается относительно магнитного поля неподвижного статора (1) и магнитное поле в нем не изменяется, отсутствует непрерывное перемагничивание, устраняется магнитный гистерезис и не образуются вихревые токи. Вращающаяся коллекторная электрическая машина постоянного тока состоит из неподвижного статора (1), прикрепленного к корпусу (4) машины, ротора (2), закрепленного на валу (3) с возможностью свободного вращения относительно статора (1), поскольку в машине используется магнитная индукция для передачи энергии между статором и ротором, и по меньшей мере одного дополнительного подвижного статора (6), расположенного соосно внутри полого ротора (2) и закрепленного с помощью подшипников (5) к внутренней части ротора (2) или к валу (3) с возможностью свободного вращения как по отношению к статору (1), так и по отношению к ротору (2). Ротор (2) является полым и имеет обмотки (11). По меньшей мере один подвижный статор (6) изготовлен по меньшей мере частично из ферромагнитных материалов и способен самоориентироваться в соответствии с линиями магнитного поля, создаваемого электрическими обмотками и/или постоянными магнитами неподвижного статора (1). Ротор (2) расположен между неподвижным статором (1) и по меньшей мере одним упомянутым подвижным статором (6). Подвижный статор (6) концентрирует и формирует магнитное поле В так, что магнитные линии почти перпендикулярны обмоткам ротора. 11 з.п. ф-лы, 43 ил.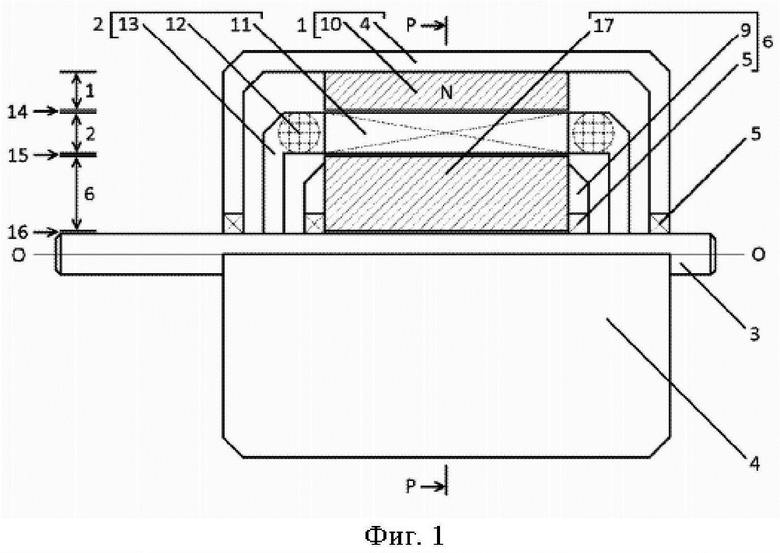
1. Вращающаяся коллекторная электрическая машина постоянного тока, состоящая из: статора (1), прикрепленного к корпусу (4) машины, ротора (2), закрепленного на валу (3) с возможностью свободного вращения относительно статора (1), поскольку в машине используется магнитная индукция для передачи энергии между статором и ротором, при этом ротор (2) является полым и имеет обмотки (11), отличающаяся тем, что также содержит по меньшей мере один дополнительный подвижный статор (6), расположенный соосно внутри полого ротора (2) и закрепленный с помощью подшипников (5) к внутренней части ротора (2) или к валу (3) с возможностью свободного вращения как по отношению к статору (1), так и по отношению к ротору (2); при этом по меньшей мере один подвижный статор (6) изготовлен по меньшей мере частично из ферромагнитных материалов и способен самоориентироваться в направлении магнитного поля, создаваемого машиной, при этом ротор (2) расположен между неподвижным статором (1) и по меньшей мере одним упомянутым подвижным статором (6).
2. Электрическая машина по п. 1, отличающаяся тем, что ротор (2) является полым цилиндром.
3. Электрическая машина по п. 1, отличающаяся тем, что ротор (2) является полым конусом.
4. Электрическая машина по любому из предшествующих пунктов, отличающаяся тем, что ферромагнитный материал в по меньшей мере одном подвижном статоре (6) образует два или более тела, идентичных по форме и расположенных симметрично относительно оси вращения на периферии подвижного статора.
5. Электрическая машина по любому из предшествующих пунктов, отличающаяся тем, что ферромагнитная часть упомянутого по меньшей мере одного подвижного статора (6) выполнена по меньшей мере частично из постоянных магнитов.
6. Электрическая машина по любому из предшествующих пунктов, отличающаяся тем, что ферромагнитная часть упомянутого по меньшей мере одного подвижного статора (6) выполнена полностью из постоянных магнитов.
7. Электрическая машина по любому из предшествующих пунктов, отличающаяся тем, что поперечное сечение статоров имеет осевую симметрию относительно оси вращения машины.
8. Электрическая машина по любому из предшествующих пунктов, отличающаяся тем, что количество полюсов по меньшей мере одного подвижного статора (6) совпадает с количеством полюсов магнитного поля, создаваемого статором (1).
9. Электрическая машина по любому из пп. 5-8, отличающаяся тем, что постоянные магниты по меньшей мере одного подвижного статора (6) формируют двухполюсный магнит.
10. Электрическая машина по любому из пп. 1-8, отличающаяся тем, что указанная машина содержит более двух магнитных полюсов.
11. Электрическая машина по любому из предшествующих пп. 1-6 и 8-10, отличающаяся тем, что количество полюсов является нечетным.
12. Электрическая машина по любому из предшествующих пп. 1-6 и 8-11, отличающаяся тем, что статоры расположены только в одной части периферии ротора машины.
| US 5723928 А, 03.03.1998 | |||
| WO 2015052124 A2, 16.04.2015 | |||
| Синхронная электрическая машина | 1977 |
|
SU780106A1 |
| Малоинерционный ротор электрической машины | 1980 |
|
SU951559A1 |
| US 2014312730 A1, 23.10.2014 | |||
| RU 2004105940 A, 27.04.2005 | |||
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2411623C2 |
| МАГНИТНЫЙ ГЕНЕРАТОР | 2000 |
|
RU2169423C1 |
| JP 2002204541 A, 19.07.2002. | |||

