Область техники, к которой относится изобретение
Настоящее раскрытие относится к области техники акустики и более подробно относится к датчику вибрации.
Уровень техники
Датчик вибрации является устройством преобразования энергии, которое преобразует сигнал вибрации в электрический сигнал. Когда датчик вибрации используется в качестве микрофона с костной проводимостью, он может обнаруживать сигнал вибрации, передаваемый через кости, кожу или мышцы, когда человек говорит, чтобы обнаруживать речевой сигнал без помех из-за внешнего шума. Будучи ограниченными технологией обработки, размером или формой упругого элемента в существующем датчике вибрации управлять трудно, что приводит в результате к большому объему, занимаемому упругим элементом в акустической полости, и делает объем элемента массы относительно маленьким, приводя к низкой чувствительности датчика вибрации.
Поэтому желательно обеспечить датчик вибрации, способный ограничить размер упругого элемента для повышения чувствительности датчика вибрации.
Раскрытие сущности изобретения
Некоторые варианты осуществления настоящего раскрытия могут представить датчик вибрации. Датчик вибрации может содержать приемник вибрации и акустический преобразователь. Приемник вибрации может содержать корпус, ограничитель и блок вибрации. Корпус и акустический преобразователь могут образовывать акустическую полость. Блок вибрации может быть расположен в акустической полости, чтобы разделять акустическую полость на первую акустическую полость и вторую акустическую полость. Акустический преобразователь может быть акустически связан с первой акустической полостью. Корпус может быть выполнен с возможностью формирования вибрации на основе внешнего сигнала вибрации. Блок вибрации может изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса, так что акустический преобразователь формирует электрический сигнал. Блок вибрации может содержать элемент массы и упругий элемент. Первая сторона упругого элемента может быть присоединена вокруг боковой стенки элемента массы. Вторая сторона упругого элемента может быть соединена с ограничителем.
В некоторых вариантах осуществления ограничитель может быть расположен между корпусом и акустическим преобразователем. Корпус, ограничитель и акустический преобразователь могут образовывать акустическую полость.
В некоторых вариантах осуществления акустический преобразователь может содержать подложку. Ограничитель может быть соединен с подложкой. Ограничитель, блок вибрации и подложка могут образовывать первую акустическую полость.
В некоторых вариантах осуществления упругий элемент может быть присоединен между ограничителем и элементом массы. Упругий элемент и подложка могут быть разнесены на некоторое расстояние друг от друга в направлении вибрации блока вибрации.
В некоторых вариантах осуществления толщина ограничителя вдоль направления вибрации блока вибрации может быть больше, чем толщина элемента массы вдоль направления вибрации блока вибрации. Сторона ограничителя, обращенная в направлении от акустического преобразователя, может быть на одном уровне со стороной элемента массы, обращенной от акустического преобразователя.
В некоторых вариантах осуществления ширина ограничителя вдоль направления, перпендикулярного направлению вибрации блока вибрации, может быть в пределах 100 мкм-500 мкм.
В некоторых вариантах осуществления ограничитель может содержать первый ограничитель и второй ограничитель. Первый ограничитель и второй ограничитель могут быть расположены последовательно вдоль направления вибрации блока вибрации. Первый ограничитель может быть соединен с корпусом. Второй ограничитель может быть соединен с акустическим преобразователем.
В некоторых вариантах осуществления вторая сторона упругого элемента может быть соединена с первым ограничителем.
В некоторых вариантах осуществления толщина первого ограничителя вдоль направления вибрации блока вибрации может быть равна толщине элемента массы вдоль направления вибрации блока вибрации.
В некоторых вариантах осуществления ширина первого ограничителя вдоль направления, перпендикулярного направлению вибрации блока вибрации, может быть меньше, чем ширина второго ограничителя вдоль направления, перпендикулярного направлению вибрации блока вибрации.
В некоторых вариантах осуществления отношение ширины первого ограничителя вдоль направления, перпендикулярного направлению вибрации блока вибрации, к ширине второго ограничителя вдоль направления, перпендикулярного направлению вибрации блока вибрации, может быть больше 0,5.
В некоторых вариантах осуществления материал первого ограничителя может отличаться от материала второго ограничителя.
В некоторых вариантах осуществления первый ограничитель может быть изготовлен по меньшей мере из одного из таких материалов, как сплав, металл или жесткая пластмасса. Второй ограничитель может быть изготовлен из паяльной пасты или из клея.
В некоторых вариантах осуществления толщина второго ограничителя вдоль направления вибрации блока вибрации может быть в пределах 50 мкм - 500 мкм.
В некоторых вариантах осуществления блок вибрации может содержать второй упругий элемент. Второй упругий элемент может быть расположен в первой акустической полости. Второй упругий элемент может быть соединен соответственно со вторым ограничителем и с акустическим преобразователем.
В некоторых вариантах осуществления площадь стороны второго упругого элемента, ближней к акустическому преобразователю, может быть больше, чем площадь стороны второго упругого элемента, дальней от акустического преобразователя.
В некоторых вариантах осуществления упругий элемент может проходить до подложки и соединяться с подложкой. Упругий элемент, элемент массы и подложка могут формировать первую акустическую полость.
В некоторых вариантах осуществления толщина ограничителя вдоль направления вибрации блока вибрации может быть равна толщине элемента массы вдоль направления вибрации блока вибрации. Площадь первой стороны упругого элемента может быть больше, чем площадь второй стороны упругого элемента.
В некоторых вариантах осуществления толщина ограничителя вдоль направления вибрации блока вибрации может быть равна толщине элемента массы вдоль направления вибрации блока вибрации. Сторона элемента массы, обращенная от подложки, может быть более удаленной от подложки, чем сторона ограничителя, обращенная от подложки.
В некоторых вариантах осуществления элемент массы может содержать участок первого отверстия. Участок первого отверстия может быть соединен с первой акустической полостью и со второй акустической полостью.
В некоторых вариантах осуществления корпус может содержать участок второго отверстия. Вторая акустическая полость может быть соединена с внешней стороной через участок второго отверстия.
В некоторых вариантах осуществления ограничитель может быть расположен между упругим элементом и корпусом.
В некоторых вариантах осуществления упругий элемент может проходить до акустического преобразователя и может соединяться с акустическим преобразователем. Упругий элемент, элемент массы и акустический преобразователь могут формировать первую акустическую полость.
В некоторых вариантах осуществления толщина ограничителя вдоль направления вибрации блока вибрации может быть в пределах 100 мкм - 1000 мкм.
Некоторые варианты осуществления настоящего раскрытия могут также представлять датчик вибрации. Датчик вибрации может содержать приемник вибрации и акустический преобразователь. Приемник вибрации может содержать корпус и блок вибрации. Корпус и акустический преобразователь могут образовывать акустическую полость. Блок вибрации может быть расположен в акустической полости так, чтобы разделять акустическую полость на первую акустическую полость и вторую акустическую полость. Акустический преобразователь может быть акустически связан с первой акустической полостью. Корпус может быть выполнен с возможностью формирования вибрации на основе внешнего сигнала вибрации. Блок вибрации может изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса, так что акустический преобразователь формирует электрический сигнал. Блок вибрации может содержать элемент массы и упругий элемент. Упругий элемент может быть присоединен вокруг боковой стенки элемента массы и проходить к корпусу.
В некоторых вариантах осуществления толщина упругого элемента вдоль направления вибрации блока вибрации может быть больше, чем толщина элемента массы вдоль направления вибрации блока вибрации.
Настоящее раскрытие дополнительно описано с точки зрения примерных вариантов осуществления. Эти примерные варианты осуществления описаны подробно со ссылкой на чертежи. Эти варианты осуществления не ограничивают примерные варианты осуществления, в которых схожие ссылочные позиции представляют схожие конструкции, и в которых:
Фиг. 1 - примерная блок-схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 2 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 3 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 4 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 5 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 6 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 7 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 8 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия;
Фиг. 9 - примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Осуществление изобретения
Чтобы более ясно проиллюстрировать технические решения вариантов осуществления настоящего раскрытия, далее кратко представляются чертежи, которые требуется использовать в описании вариантов осуществления. Очевидно, чертежи в последующих описаниях являются только некоторыми примерами или вариантами осуществления раскрытия. Специалистами в данной области техники без творческих усилий настоящее раскрытие может применяться к другим подобным сценариям в соответствии с этими чертежами. Если из письменного описания или как-либо иначе явно не следует, одинаковые ссылочные позиции на чертежах представляют одинаковые конструкции или операции.
Следует понимать, что термины "система", "устройство", "блок" и/или "модуль", используемые здесь, являются одним из способов различения различных компонент, элементов, частей, секций или сборочных узлов разных уровней. Однако, термины могут заменяться другими выражениями, если они достигают той же цели.
Термины "первый", "второй" и подобные слова, используемые в настоящем раскрытии и формуле изобретения, используются только для различения различных компонент и не указывают ни порядок, ни количество или важность. Аналогично, термины в единственном числе не обозначают ограничение количества, но указывают, что существует по меньшей мере одна позиция. Если иначе не указано, такие термины, как "передний", "задний", "нижний" и/или "верхний", используются только для удобства описания и не предназначены ограничиваться каким-либо местоположением или ориентацией в пространстве. Вообще говоря, термины "содержит" и "включает" определяют только присутствие заявленных операций и элементов, но эти операции и элементы не составляют эксклюзивный список и способ или устройство могут также содержать другие операции или элементы.
Варианты осуществления настоящего раскрытия описывают датчик вибрации. В некоторых вариантах осуществления датчик вибрации может содержать приемник вибрации и акустический преобразователь. В некоторых вариантах осуществления приемник вибрации может содержать корпус, ограничитель и блок вибрации. Корпус может быть соединен с ограничителем для формирования акустической полости. Блок вибрации может быть расположен в акустической полости для разделения акустической полости на первую акустическую полость и вторую акустическую полость. Акустический преобразователь может быть акустически связан с первой акустической полостью. В некоторых вариантах осуществления корпус может создавать вибрацию на основе внешнего сигнала вибрации (например, сигнала, сформированного вибрацией кости, кожи, и т.д., когда пользователь говорит) и блок вибрации может изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса, так чтобы акустический преобразователь создавал электрический сигнал.
В некоторых вариантах осуществления блок вибрации может содержать элемент массы и упругий элемент. Первая сторона упругого элемента может быть присоединена вокруг боковой стенки элемента массы, а вторая сторона упругого элемента может быть соединена с ограничителем так, что упругий элемент может быть присоединен между элементом массы и ограничителем. Первая сторона упругого элемента может быть стороной упругого элемента, проходящей к элементу массы. Вторая сторона упругого элемента может быть стороной, противоположной первой стороне упругого элемента, и вторая сторона упругого элемента может проходить к ограничителю. В некоторых вариантах осуществления ограничитель может быть расположен между корпусом и акустическим преобразователем. В некоторых вариантах осуществления ограничитель может быть расположен между упругим элементом и корпусом. В некоторых вариантах осуществления настоящего раскрытия, располагая ограничитель в приемнике вибрации датчика вибрации, ограничитель может быть выполнен с возможностью ограничения упругого элемента, чтобы управлять потоком упругого элемента во время изготовления приемника вибрации, упрощая, таким образом, управление размером и/или формой упругого элемента, чтобы регулировать (например, увеличивать) размер или объем элемента массы и повышать чувствительность датчика вибрации.
В некоторых вариантах осуществления приемник вибрации может содержать корпус и блок вибрации. Блок вибрации может содержать элемент массы и упругий элемент. Упругий элемент может быть присоединен вокруг боковой стенки элемента массы и может проходить к корпусу.
На фиг. 1 представлена примерная блок-схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Как показано на фиг. 1, датчик 100 вибрации может содержать приемник 110 вибрации и акустический преобразователь 120. В некоторых вариантах осуществления приемник 110 вибрации и акустический преобразователь 120 могут быть соединены посредством физического соединения. Физическое соединение в настоящем раскрытии может содержать сварное соединение, зажимное соединение, клеевое соединение, интегральное прессование и т. п. или любое их сочетание.
В некоторых вариантах осуществления датчик 100 вибрации может быть выполнен как микрофон с костной проводимостью. Когда датчик вибрации выполнен как микрофон с костной проводимостью, датчик 100 вибрации может принимать сигнал вибрации тканей, таких как кость и кожа, формируемый, когда пользователь говорит, и преобразовывать сигнал вибрации в электрический сигнал, содержащий звуковую информацию. Так как звук (или вибрация) через воздух почти не собирается, датчик 100 вибрации может быть до некоторой степени неуязвим для влияния шумов окружающей среды (например, шумов, создаваемых другими людьми, шумов, создаваемых транспортными средствами в окружающей среде) и датчик 100 вибрации может быть пригоден для использования в шумной среде для получения звукового сигнала, когда пользователь говорит. В некоторых вариантах осуществления датчик 100 вибрации может быть применим к наушнику (например, к наушнику с воздушной проводимостью и к наушнику с костной проводимостью), слуховому аппарату, вспомогательному слуховому аппарату, очкам, шлему, устройству дополненной реальности (AR), устройству виртуальной реальности (VR) и т.п. или к любому их сочетанию. Например, датчик 100 вибрации может быть применен к наушнику в качестве микрофона с костной проводимостью.
Приемник 110 вибрации может быть выполнен с возможностью приема и передачи сигнала вибрации. В некоторых вариантах осуществления приемник 110 вибрации может содержать корпус и блок вибрации. В некоторых вариантах осуществления приемник 110 вибрации может дополнительно содержать ограничитель. В некоторых вариантах осуществления ограничитель может быть расположен между корпусом и акустическим преобразователем 120. Приемник 110 вибрации может быть присоединен к акустическому преобразователю 120 через ограничитель. В некоторых вариантах осуществления корпус может иметь полую конструкцию. Корпус, ограничитель и акустический преобразователь 120 могут быть соединены друг с другом для образования акустической полости. Некоторые компоненты (например, блок вибрации) датчика 100 вибрации могут быть расположены в акустической полости. В некоторых вариантах осуществления блок вибрации может быть расположен в акустической полости. Блок вибрации (например, упругий элемент и элемент массы) может быть соединен с ограничителем для разделения акустической полости на первую акустическую полость и вторую акустическую полость. Первая акустическая полость может быть акустически связана с акустическим преобразователем 120. Акустическая связь может быть связью, через которую может передаваться звуковое давление, звуковая волна или сигнал вибрации.
В некоторых вариантах осуществления ограничитель может быть расположен между блоком вибрации (например, упругим элементом) и корпусом. Упругий элемент может проходить к акустическому преобразователю и может соединяться с акустическим преобразователем 120. Блок вибрации (например, упругий элемент и элемент массы) и акустический преобразователь 120 могут формировать первую акустическую полость.
Акустический преобразователь 120 может формировать электрический сигнал, содержащий звуковую информацию, основанную на изменении звукового давления в первой акустической полости. В некоторых вариантах осуществления сигнал вибрации может приниматься приемником 110 вибрации и внутреннее давление воздуха в первой акустической полости может изменяться. Акустический преобразователь 120 может создавать электрический сигнал на основе изменения внутреннего давления воздуха в первой акустической полости. В некоторых вариантах осуществления, когда датчик 100 вибрации работает, корпус может вибрировать, основываясь на внешнем сигнале вибрации (например, сигнале, сформированном вибрацией кости, кожи и т. д., когда пользователь говорит). Блок вибрации может вибрировать в ответ на вибрацию корпуса через ограничитель и передавать вибрацию к акустическому преобразователю 120 через первую акустическую полость. В некоторых вариантах осуществления акустический преобразователь 120 может создавать вибрацию на основе внешнего сигнала вибрации и передавать сигнал вибрации блоку вибрации. В некоторых вариантах осуществления акустический преобразователь 120 может создавать вибрацию на основе внешнего сигнала вибрации. Блок вибрации может вибрировать в ответ на вибрацию акустического преобразователя 120 через ограничитель или корпус, присоединенный к акустическому преобразователю 120. Например, вибрация блока вибрации может вызывать изменение объема первой акустической полости, создавая, таким образом, изменение давления воздуха в первой акустической полости. Изменение давления воздуха в первой акустической полости может быть преобразовано в изменение звукового давления. Акустический преобразователь 120 может обнаруживать изменение звукового давления в первой акустической полости и создавать электрический сигнал, основанный на изменении звукового давления в первой акустической полости. Например, акустический преобразователь 120 может содержать диафрагму. Звуковое давление в первой акустической полости может изменяться и воздействовать на диафрагму, что может заставлять диафрагму вибрировать (или деформироваться). Акустический преобразователь 120 может преобразовать вибрацию диафрагмы в электрический сигнал. Дополнительные описания датчика 100 вибрации может быть найдено на фиг. 2-9 и в их описаниях.
Следует заметить, что вышеупомянутые описания датчика 100 вибрации и его компонент служат только для иллюстрации и описания, и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 100 вибрации различные модификации и изменения. В некоторых вариантах осуществления датчик 100 вибрации может дополнительно содержать другие компоненты. Например, источник питания может быть выполнен с возможностью для обеспечения электрической энергии для акустического преобразователя 120 и т. п. Эти модификации и изменения все остаются в рамках объема настоящего раскрытия.
На фиг. 2 представлена структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Как показано на фиг. 2, датчик 200 вибрации может содержать приемник 210 вибрации и акустический преобразователь 220. В некоторых вариантах осуществления приемник 210 вибрации может содержать корпус 211, ограничитель 212 и блок 213 вибрации. Ограничитель 212 может быть расположен между корпусом 211 и акустическим преобразователем 220. Приемник 210 вибрации может быть соединен с акустическим преобразователем 220 через ограничитель 212.
В некоторых вариантах осуществления корпус 211 может иметь полую конструкцию. Корпус 211 может быть соединен с акустическим преобразователем 220 через ограничитель 212 для образования акустической полости. В некоторых вариантах осуществления блок 213 вибрации может быть расположен в акустической полости. Блок 213 вибрации может быть соединен с ограничителем 212 для разделения акустической полости на первую акустическую полость 214 и вторую акустическую полость 215. В некоторых вариантах осуществления ограничитель 212 может быть соединен с подложкой 221 акустического преобразователя 220, так чтобы блок 213 вибрации, ограничитель 212 и подложка 221 могли образовывать первую акустическую полость 214. Ограничитель 212 может быть соединен с корпусом 211, такой чтобы блок 213 вибрации, ограничитель 212 и корпус 211 могли образовывать вторую акустическую полость 215. В некоторых вариантах осуществления форма корпуса 211 может иметь правильную или неправильную трехмерную конструкцию, например, кубоида, цилиндра или кругового усеченного конуса. В некоторых вариантах осуществления материал корпуса 211 может содержать металл (например, медь, железо, алюминий), сплав (например, нержавеющая сталь), пластмассу и т.п. или любое их сочетание. В некоторых вариантах осуществления корпус 211 может иметь определенную толщину для обеспечения достаточной прочности, чтобы защитить компоненты (например, блок 213 вибрации) датчика 100 вибрации, расположенные в корпусе 211.
Датчик 200 вибрации может преобразовывать внешний сигнал вибрации в электрический сигнал. Просто для примера, внешний сигнал вибрации может содержать сигнал вибрации, когда человек говорит, сигнал вибрации, сформированный кожей, когда тело человека движется или когда вблизи кожи работают другие устройства, и сигнал вибрации, сформированный объектом или воздухом, контактирующим с датчиком 200 вибрации и т. п., или любое их сочетание. Когда датчик 200 вибрации работает, корпус 211 может вибрировать в ответ на внешний сигнал вибрации. Вибрация корпуса 211 может передаваться блоку 213 вибрации через ограничитель 212. Блок 213 вибрации может вибрировать в ответ на вибрацию корпуса 211. Вибрация блока 213 вибрации может вызывать изменение объема первой акустической полости 214, тем самым вызывая изменение давления воздуха в первой акустической полости 214. Изменение давления воздуха в полости может быть преобразовано в изменение звукового давления в полости. Акустический преобразователь 220 может быть акустически связан с первой акустической полостью 214, чтобы обнаруживать изменение звукового давления в первой акустической полости 214 и преобразовывать изменение звукового давления в электрический сигнал. Например, акустический преобразователь 220 может содержать отверстие 2211 звукового датчика. Изменение звукового давления в первой акустической полости 214 может воздействовать на диафрагму акустического преобразователя 220 через отверстие 2211 звукового датчика, так чтобы диафрагма могла вибрировать (или деформироваться), создавая электрический сигнал. В некоторых вариантах осуществления отверстие 2211 звукового датчика может быть расположена на подложке 221 акустического преобразователя 220. Отверстие 2211 звукового датчика может проходить сквозь подложку 221 вдоль направления вибрации блока 213 вибрации. Дополнительно, электрический сигнал, сформированный акустическим преобразователем 220, может передаваться внешнему электронному устройству. Просто для примера, акустический преобразователь 220 может содержать интерфейс (не показанный на чертежах). Интерфейс может присоединяться к внутреннему элементу (например, процессору) внешнего электронного устройства через проводное соединение (например, электрическое соединение) или беспроводное соединение. Электрический сигнал, сформированный акустическим преобразователем 220, может передаваться внешнему электронному устройству через интерфейс посредством проводного соединения или беспроводного соединения. В некоторых вариантах осуществления внешнее электронное устройство может содержать мобильное устройство, носимое устройство, устройство виртуальной реальности, устройство дополненной реальности и т.п. или любое их сочетание. В некоторых вариантах осуществления мобильное устройство может содержать смартфон, планшетный компьютер, персонального цифрового секретаря (PDA), игровое устройство, навигационное устройство и т.п. или любое их сочетание. В некоторых вариантах осуществления носимое устройство может содержать смарт-браслет, наушник, слуховой аппарат, смарт-шлем, смарт-часы, смарт-одежду, смарт-рюкзак, смарт-аксессуар и т. п. или любое их сочетание. В некоторых вариантах осуществления устройство виртуальной реальности и/или устройство дополненной реальности могут содержать шлем виртуальной реальности, очки виртуальной реальности, патч виртуальной реальности, шлем дополненной реальности, очки дополненной реальности, патч дополненной реальности и т.п. или любое их сочетание. Например, устройство виртуальной реальности и/или устройство дополненной реальности могут содержать Google Glass, Oculus Rift, Hololen, Gear VR и т.д.
В некоторых вариантах осуществления акустический преобразователь 220 может содержать подложку 221. Подложка 221 может быть выполнен с возможностью крепления на ней и/или поддержки приемника 210 вибрации. В некоторых вариантах осуществления подложка 221 может быть расположена на акустическом преобразователе 220. Корпус 211 может быть присоединен к подложке 221 через ограничитель 212 для образования акустической полости. В некоторых вариантах осуществления материал подложки 221 может содержать металл (например, железо, медь), сплав (например, нержавеющая сталь), неметалл (пластмасса, резина, смола), и т.п., или любая комбинация этого. В некоторых вариантах осуществления, организуя подложку 221, приемник 210 вибрации может быть обработан, изготовлен и продан в качестве независимого компонента. Акустический преобразователь 220 с подложкой 221 может напрямую присоединяться к приемнику 210 вибрации через физическое соединение (например, клеевое соединение), чтобы получить датчик 200 вибрации, который может упростить производственный процесс датчика 200 вибрации и повысить гибкость процесса производства датчика 200 вибрации. В некоторых вариантах осуществления толщина подложки 221 может быть в пределах 10 мкм - 300 мкм. Например, толщина подложки 221 может быть в пределах 80 мкм - 90 мкм.
В некоторых вариантах осуществления блок вибрации 213 может содержать элемент 2131 массы и упругий элемент 2132. Первая сторона упругого элемента 2132 может быть присоединена вокруг боковой стенки элемента 2131 массы. Вторая сторона упругого элемента 2132 может быть присоединена к ограничителю 212. Первая сторона упругого элемента 2132 может быть стороной упругого элемента 2132, ближней к элементу 2131 массы. Вторая сторона упругого элемента 2132 может быть стороной, противоположной первой стороне упругого элемента 2132. То есть, вторая сторона упругого элемента 2132 может быть стороной упругого элемента 2132, ближней к ограничителю 212. Например, упругий элемент 2132 может иметь кольцевую структуру. Первая сторона упругого элемента 2132 может быть внутренней кольцевой стороной кольцевой структуры. Вторая сторона упругого элемента 2132 может быть внешней кольцевой стороной кольцевой структуры. Первая сторона и вторая сторона упругого элемента 2132 могут быть расположены вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации. В некоторых вариантах осуществления упругий элемент 2132 может быть присоединен к элементу 2131 массы и/или к ограничителю 212 через физическое соединение, например, клеевое соединение. Просто для примера, упругий элемент 2132 может быть сделан из материала (например, клея) с хорошей вязкостью, так чтобы упругий элемент 2132 может быть напрямую скреплен с элементом 2131 массы и/или с ограничителем 212.
В некоторых вариантах осуществления упругий элемент 2132 может быть изготовлен из высокотемпературного материалам, так что упругий элемент 2132 может сохранять свои характеристики во время процесса изготовления датчика 200 вибрации. В некоторых вариантах осуществления, когда упругий элемент 2132 находится в среде с температурой 200°C - 300°C, модуль Юнга и модуль сдвига упругого элемента 2132 могут не меняться или меняться незначительно (например, изменение может быть составлять 5 %). Модуль Юнга может использоваться для характеристики деформируемости упругого элемента 2132, когда он растягивается или сжимается. Модуль сдвига может использоваться для характеристики деформируемости упругого элемента 2132 при его сдвиге. В некоторых вариантах осуществления упругий элемент 2132 может быть изготовлен из материала с хорошей упругостью (т.е. подверженном упругой деформации), так что блок 213 вибрации может вибрировать в ответ на вибрацию корпуса 211. Просто для примера, материал упругого элемента 2132 может содержать кремниевую резину, силикагель, силиконовый клей, силиконовый уплотнитель и т.п. или любое их сочетание. Для создания упругого элемента 2132 с хорошей упругостью в некоторых вариантах осуществления твердость по Шору упругого элемента 2132 может составлять менее 50 НА. Например, твердость по Шору упругого элемента 2132 может быть в пределах 5 НА - 50 НА.
В некоторых вариантах осуществления плотность материала элемента 2131 массы может быть больше определенного порога плотности (например, 6 г/см3). Например, материал элемента 2131 массы может содержать металл или сплав, такой как свинец, медь, серебро, олово, нержавеющая сталь, нержавеющее железо и т.п. или любое их сочетание. В случае той же массы, чем выше плотность материала элемента 2131 массы, тем меньше размер элемента 2131 массы. Поэтому элемент 2131 массы может быть изготовлен из материала с плотностью, большей определенного порога плотности, что может в некоторой степени уменьшить размер датчика 200 вибрации. В некоторых вариантах осуществления плотность материала элемента массы 2131 может оказывать большое влияние на резонансный пик и чувствительность частотной характеристики датчика 200 вибрации. В случае одинакового объема, чем больше плотность элемента 2131 массы, тем больше масса элемента 2131 массы и резонансный пик датчика 200 вибрации может перемещаться к более низкой частоте. Увеличивая массу элемента 2131 массы, можно повысить чувствительность датчика 200 вибрации 200 в полосе относительно низких частот (например, 20 Гц - 6000 Гц). В некоторых вариантах осуществления плотность материала элемента 2131 массы может быть больше 6 г/см3. Например, плотность материала элемента 2131 массы может быть в пределах 7-20 г/см3. В некоторых вариантах осуществления элемент 2131 массы и упругий элемент 2132 могут быть изготовлены из различных материалов. Элемент 2131 массы и упругий элемент 2132 могут быть собраны (например, склеены) вместе для образования блока 213 вибрации. В некоторых вариантах осуществления элемент 2131 массы и упругий элемент 2132 могут быть изготовлены из одинакового материала. Блок 213 вибрации может быть изготовлен интегральным прессованием. В некоторых вариантах осуществления толщина элемента 2131 массы вдоль направления вибрации элемента 2131 массы может быть в пределах 60 мкм - 1150 мкм. Например, толщина элемента 2131 массы вдоль направления вибрации элемента 2131 массы может быть в пределах 140 мкм - 200 мкм.
В некоторых вариантах осуществления упругий элемент 2132 и подложка 221 акустического преобразователя 220 могут быть разнесены друг от друга на определенное расстояние в направлении вибрации блока 213 вибрации. Располагая упругий элемент 2132 так, чтобы он не контактировал с подложкой 221, процесс изготовления датчика 200 вибрации может стать проще. В некоторых вариантах осуществления датчик 200 вибрации может быть подготовлен отдельным способом изготовления. Например, приемник 210 вибрации и акустический преобразователь 220 могут быть подготовлены отдельно. Тогда приемник 210 вибрации и акустический преобразователь 220 могут физически соединяться (например, свариваться, склеиваться), чтобы получить датчик 200 вибрации. В некоторых вариантах осуществления расстояние между упругим элементом 2132 и подложкой 221 в направлении вибрации блока 213 вибрации может быть определено на основе требований датчика 200 вибрации, например, высоты первой акустической полости 214 вдоль направления вибрации блока 213 вибрации, что здесь не ограничивается.
В некоторых вариантах осуществления элемент 2131 массы может дополнительно содержать участок 21311 первого отверстия. Участок 21311 первого отверстия может быть связан с первой акустической полостью 214 и второй акустической полостью 215. Участок 21311 первого отверстия может проходить через элемент 2131 массы. Участок 21311 первого отверстия может позволить прохождение газа в первой акустической полости 214 и во второй акустической полости 215, чтобы уравновесить изменение давления воздуха в первой акустической полости 214 и во второй акустической полости 215, вызванное изменением температуры во время процесса изготовления (например, во время сварки в обратном потоке) датчика вибрации 200 и уменьшить или предотвратить повреждение компонент датчика 200 вибрации 200, вызванных изменением давления воздуха, например, растрескивания, деформации и т. д.
В некоторых вариантах осуществления участок 21311 первого отверстия может иметь структуру одиночного отверстия. В некоторых вариантах осуществления диаметр одиночного отверстия может быть в пределах 1 мкм - 50 мкм. Например, диаметр одиночного отверстия может быть в пределах 7 мкм - 10 мкм. В некоторых вариантах осуществления участок 21311 первого отверстия может быть массивом, содержащим определенное количество микропор. Просто для примера, количество микропор может быть в пределах 2 - 10. В некоторых вариантах осуществления диаметр каждой микропоры может быть в пределах 0,1 мкм - 25 мкм. Например, диаметр каждой микропоры может быть 20 мкм.
В некоторых вариантах осуществления элемент 2131 массы может не иметь участка 21311 первого отверстия. В некоторых вариантах осуществления, когда элемент 2131 массы не имеет участка 21311 первого отверстия, компоненты датчик 200 вибрации могут быть защищены от повреждения из-за изменения давления воздуха в первой акустической полости 214, повышая прочность соединения между элементом 2131 массы и элементом 2132 упругости (например, путем увеличения адгезивной прочности клея между элементом 2131 массы и элементом 2132 упругости).
В некоторых вариантах осуществления по крайней мере один участок 2111 со вторым отверстием может быть расположен на корпусе 211. Участок 2111 второго отверстия может проходить через корпус 211. Конструкция участка 2111 второго отверстия может совпадать или быть подобна конструкции участка первого отверстия 21311. Участок 2111 второго отверстия может позволить второй акустической полости 215 связываться с внешней средой, чтобы уравновесить изменение давления воздуха во второй акустической полости 215, вызванное изменением температуры во время процесса изготовления датчика 200 вибрации, и уменьшить или предотвратить повреждение компонент датчика 200 вибрации, вызванное изменением давления воздуха, например, растрескивание, деформация и т. д. Кроме того, когда элемент 2131 массы вибрирует, участок 2111 второго отверстия может быть выполнен с возможностью уменьшения поглощения, создаваемого газом внутри второй акустической полости 215.
В некоторых вариантах осуществления звук воздушной проводимости в среде может отрицательно влиять на характеристики датчика 200 вибрации. Для уменьшения влияния звука воздушной проводимости в среде после того, как датчик 200 вибрации подготовлен, например, после пайки в обратном потоке, для герметизации участка 2111 второго отверстия на корпусе 211 может использоваться уплотнительный материал для герметизации участка 2111 второго отверстия. Просто для примера, уплотнительный материал может содержать эпоксидный клей, силиконовый уплотнитель и т.п. или любое их сочетание. В некоторых вариантах осуществления в корпусе 211 нельзя обеспечить участок 2111 второго отверстия.
В некоторых вариантах осуществления первая сторона упругого элемента 2132 может быть присоединена вокруг периферийной боковой поверхности элемента 2131 массы. Например, когда элемент 2131 массы имеет колоннообразную структуру (цилиндр или призма), периферийная боковая поверхность элемента 2131 массы может быть боковой поверхностью колоннообразной структуры. В некоторых вариантах осуществления вторая сторона упругого элемента 2132 может быть присоединена вокруг внутренней стенки ограничителя 212, так что проекции элемента 2131 массы, упругого элемента 2132 и ограничителя 212 вдоль направления вибрации блока 213 вибрации располагаются последовательно изнутри наружу. В некоторых вариантах осуществления проекция элемента 2131 массы вдоль направления вибрации блока 213 вибрации может иметь форму правильного и/или неправильного многоугольника, такую как круг, прямоугольник, пятиугольник, шестиугольник и т. п. Проекции упругого элемента 2132 и ограничителя 212 вдоль направления вибрации блока 213 вибрации могут иметь правильную и/или неправильную кольцевую многоугольную форму, такую как кольцо, прямоугольное кольцо, пятиугольное кольцо, шестиугольное кольцо и т.п., соответствующие правильной и/или неправильной многоугольной форме, такой как круг, прямоугольник, пятиугольник, шестиугольник и т.п. В некоторых вариантах осуществления упругий элемент 2132 может быть в тесном контакте с окружающими поверхностями элемента 2131 массы и/или ограничителя 212, что может обеспечивать герметизацию первой акустической полости 214, так чтобы изменение давления воздуха в первой акустической полости 214 могло быть связано только с амплитудой колебаний блока 213 вибрации, делая, таким образом, изменение звукового давления в первой акустической полости 214 явным и эффективным.
В некоторых вариантах осуществления конструкция упругого элемента 2132 может быть однослойной конструкцией, двухслойной конструкцией, многослойной конструкцией и т.п. Размер и материал каждого слоя двухслойной конструкции или многослойной конструкции упругого элемента 2132 могут быть одинаковыми или отличающимися. Конструкция упругого элемента 2132 может быть разумно определена на основе процесса изготовления датчика 200 вибрации, что не ограничивается в настоящем раскрытии.
В некоторых вариантах осуществления из-за влияния типа материала упругого элемента 2132, например, клеевого материала, в процессе изготовления датчика 200 вибрации упругий элемент 2132 может находиться в полужидком состоянии или упругий элемент 2132 может легко деформироваться во время высокотемпературного процесса, затрудняя управление размером и формой упругого элемента 2132. Поэтому, если никакой ограничитель не предусмотрен, размер элемента 2131 массы, возможно, должен быть уменьшен, чтобы гарантировать, что упругий элемент 2132 не вытекает за пределы корпуса 211, таким образом, избегая влияния на соединение между корпусом 211 и подложкой 211 в последующем процессе. Располагая ограничитель 212 на датчике 200 вибрации, можно управлять размером упругого элемента 2132. Например, в процессе изготовления датчика 200 вибрации ограничитель 212 и элемент 2131 массы могут быть закреплены и затем упругий элемент 2132 может заполнять зазор между ограничителем 212 и элементом 2131 массы. Поэтому размером упругого элемента 2132 можно управлять, расширения упругого элемента 2132 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, можно избежать, может быть обеспечено поле допуска для увеличения размера элемента 2131 массы и характеристики датчика 200 вибрации могут быть улучшены. Например, чувствительность датчика 200 вибрации может быть улучшена.
В некоторых вариантах осуществления ограничитель 212 может быть расположен между корпусом 211 и акустическим преобразователем 220. Корпус 211 может быть соединен с акустическим преобразователем 220 через ограничитель 212. Когда полный размер датчика 200 вибрации и размер ограничителя 212 фиксированы, по сравнению с расположением ограничителя 212 внутри корпуса 211, расположение ограничителя 212 между корпусом 211 и акустическим преобразователем 220 может уменьшить объем акустической полости, занятой ограничителем 212, увеличивая, таким образом, объем для элемента 2131 массы (например, увеличивая ширину 2131 элемента массы вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации). Чувствительность датчика вибрации 200 может быть повышена.
В некоторых вариантах осуществления ограничитель 212 может быть изготовлен из жесткого материала, чтобы гарантировать, что ограничитель 212 обладает достаточной прочностью. В некоторых вариантах осуществления жестким материалом может быть, но не ограничиваясь только этим, металл (например, медь, железо, алюминий), сплав (например, нержавеющая сталь), жесткая пластмасса и т.п. Например, медь может использоваться при изготовлении ограничителя 212 для упрощения сварки между ограничителем 212 и подложкой 221. Как другой пример, нержавеющая сталь может использоваться для изготовления ограничителя 212, чтобы гарантировать, что ограничитель 212 имеет относительно высокую прочность. Поэтому надежность конструкции ограничителя 212 может быть обеспечена. В некоторых вариантах осуществления ограничитель 212 может быть изготовлен из немагнитного проводящего металла.
В некоторых вариантах осуществления, когда другие параметры (например, материала) ограничителя 212 постоянны, ширина ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может влиять на прочность ограничителя 212. Например, когда другие параметры (например, материала) ограничителя 212 постоянны, чем меньший ширина ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации (ширина “d” ограничителя 212, как показано на фиг. 2), тем ниже прочность ограничителя 212. Поэтому может потребоваться, чтобы ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации была больше, чем первый порог ширины (например, 100 мкм), чтобы гарантировать, что ограничитель 212 имеет достаточную прочность. В некоторых вариантах осуществления ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации может быть больше, чем 100 мкм.
В некоторых вариантах осуществления, когда полный размер датчика 200 вибрации постоянен, ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может влиять на ширину элемента 2131 массы вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации. Например, когда полный размер датчика 200 вибрации постоянен, чем больше ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, тем меньше ширина элемента 2131 массы вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, и ниже чувствительность датчика 200 вибрации. Поэтому ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, возможно, должна быть меньше, чем второй порог ширины (например, 500 мкм), чтобы гарантировать, что элемент 2131 массы имеет соответствующий размер, гарантируя, таким образом, что датчик 200 вибрации имеет высокую чувствительность. В некоторых вариантах осуществления ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации может быть меньше 500 мкм. Например, ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации может быть меньше 300 мкм. Как другой пример, ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации может быть меньше 200 мкм.
В некоторых вариантах осуществления первый порог ширины и/или второй порог ширины могут быть определены на основе прочности материала ограничителя 212, требования к полному размеру датчика 200 вибрации и/или требования к характеристикам датчика 200 вибрации. В некоторых вариантах осуществления ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть в пределах 100 мкм-500 мкм. Например, ширина “d” ограничителя 212 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть в пределах 100 мкм-200 мкм.
В некоторых вариантах осуществления в процессе изготовления датчика 200 вибрации высота первой акустической полости 214 вдоль направления вибрации блока 213 вибрации можно управляться путем установки толщины ограничителя 212 и толщины элемента 2131 массы вдоль направления вибрации блока 213 вибрации. В некоторых вариантах осуществления толщина ограничителя 212 вдоль направления вибрации блока 213 вибрации может быть больше, чем толщина элемента 2131 массы вдоль направления вибрации блока 213 вибрации. Сторона элемента 2131 массы, обращенная от подложки 221, может быть на одном уровне со стороной ограничителя 212, обращенной от подложки 221. Разница между толщиной ограничителя 212 вдоль направления вибрации блока 213 вибрации и толщиной элемента 2131 массы вдоль направления вибрации блока 213 вибрации может быть равна высоте первой акустической полости 214 вдоль направления вибрации блока 213 вибрации. Поэтому при изготовлении датчика 200 вибрации высота первой акустической полости 214 вдоль направления вибрации блока 213 вибрации может быть ограничена путем установки толщины ограничителя 212 вдоль направления вибрации блока 213 вибрации и толщины элемента 2131 массы вдоль направления вибрации блока 213 вибрации, так чтобы управление высотой первой акустической полости 214 вдоль направления вибрации блока 213 вибрации могло быть точным.
Следует заметить, что приведенные выше описания датчика 200 вибрации и его компонент предназначены только для иллюстрации и описания и не ограничивают объем защиты настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут делать различные модификации и изменения в датчике 200 вибрации. Например, участок 21311 первого отверстия проходить сквозь упругий элемент 2132. Эти модификации и изменения все остаются в рамках объема настоящего раскрытия.
На фиг. 3 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Конструкция датчика 300 вибрации, показанная на фиг. 3, может быть подобна конструкции датчика 200 вибрации, показанного на фиг. 2, и разница состоит в различии конструкции ограничителя. Как показано на фиг. 3, ограничитель 312 датчика 300 вибрации может содержать первый ограничитель 3121 и второй ограничитель 3122. Первый ограничитель 3121 и второй ограничитель 3122 могут быть последовательно расположены вдоль направления вибрации блока 213 вибрации. Первый ограничитель 3121 может быть присоединен к корпусу 211. Второй ограничитель 3122 может быть присоединен к акустическому преобразователю 220 (например, к подложке 221). То есть, корпус 211, первый ограничитель 3121, второй ограничитель 3122 и акустический преобразователь 220 (например, подложка 221) могут быть последовательно соединены вдоль направления вибрации блока 213 вибрации. В некоторых вариантах осуществления первая сторона упругого элемента 2132 может быть присоединена к периферийной стороне элемента 2131 массы. Вторая сторона упругого элемента 2132 может быть присоединена к первому ограничителю 3121. То есть, упругий элемент 2132 может быть присоединен между элементом 2131 массы и первым ограничителем 3121. Упругий элемент 2132 и подложка 221 могут быть расположены на некотором расстоянии друг от друга в направлении вибрации блока 213 вибрации.
В некоторых вариантах осуществления толщина первого ограничителя 3121 вдоль направления вибрации блока 213 вибрации может быть равна толщине элемента 2131 массы вдоль направления вибрации блока 213 вибрации. В некоторых вариантах осуществления первый ограничитель 3121 и элемент 2131 массы могут быть изготовлены из одинакового материала. В этом случае первый ограничитель 3121 и элемент 2131 массы могут быть обработаны одновременно, таким образом, сокращая технологический поток и делая процесс изготовления датчика 300 вибрации более быстрым и более простым.
В некоторых вариантах осуществления толщина второго ограничителя 3122 вдоль направления вибрации блока 213 вибрации может быть равна высоте первой акустической полости 214 вдоль направления вибрации блока 213 вибрации. При таком построении, при изготовлении приемника 210 вибрации толщина второго ограничителя 3122 вдоль направления вибрации блока 213 вибрации может быть установлена в соответствии с требованием к высоте первой акустической полости 214 вдоль направления вибрации блока 213 вибрации, так чтобы управление высотой первой акустической полости 214 вдоль направления вибрации блока 213 вибрации могло быть более точным. В некоторых вариантах осуществления толщина второго ограничителя 3122 вдоль направления вибрации блока 213 вибрации может быть в пределах 50 мкм - 500 мкм. Например, толщина второго ограничителя 3122 вдоль направления вибрации блока 213 вибрации может быть в пределах 150 мкм - 400 мкм. Как другой пример, толщина второго ограничителя 3122 вдоль направления вибрации блока 213 вибрации может быть в пределах 250 мкм-300 мкм.
В некоторых вариантах осуществления ширина первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, и ширина второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, могут быть одинаковыми или разными. В некоторых вариантах осуществления ширина первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть меньше, чем ширина второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, так что упругий элемент 2132 может быть расположен между ограничителем 3121 и элементом 2131 массы. Например, путем установки ширины первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, так, чтобы она была меньшим, чем ширина второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, упругий элемент 2132 может быть более удобно присоединен между первым ограничителем 3121 и элементом 2131 массы. В некоторых вариантах осуществления отношение ширины первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, к ширине второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть больше 0,5. Когда полный размер датчика вибрации 300 является постоянным, чем меньше ширина первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, тем больше ширина элемента 2131 массы 2131 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, и чувствительность датчика вибрации 300 может быть увеличена. С другой стороны, путем установки большей ширины первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, общая прочность ограничителя 312 может быть в некоторой степени повышена.
В некоторых вариантах осуществления ширина первого ограничителя 3121 и/или второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть в пределах 100 мкм-500 мкм. Например, ширина первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть в пределах 100 мкм-250 мкм. Ширина второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть в пределах 200 мкм-500 мкм.
В некоторых вариантах осуществления ширина первого ограничителя 3121 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть меньше, чем ширина второго ограничителя 3122 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации.
В некоторых вариантах осуществления материал первого ограничителя 3121 и материал второго ограничителя 3122 могут быть одинаковыми. В некоторых вариантах осуществления материал первого ограничителя 3121 и материал второго ограничителя 3122 могут быть жестким материалом. Например, материал первого ограничителя 3121 и материал второго ограничителя 3122 могут быть металлом (например, медь), сплавом (например, нержавеющая сталь), жесткой пластмассой и т.п. Первый ограничитель 3121 и второй ограничитель 3122 могут быть изготовлены из одинакового материала, чтобы упростить процесс изготовления датчика 300 вибрации.
В некоторых вариантах осуществления материал первого ограничителя 3121 и материал второго ограничителя 3122 могут быть разными. Например, первый ограничитель 3121 может быть изготовлен из жесткого материала (например, металла, сплава, жесткой пластмассы). Второй ограничитель 3122 может быть изготовлен из паяльной пасты или клея. В процессе изготовления датчика 300 вибрации сначала корпус 211 может быть присоединен к первому ограничителю 3121. Затем корпус 211 и первый ограничитель 3121 могут быть напрямую присоединены (например, приклеены) к подложке 221 через второй ограничитель 3122, так что процесс изготовления датчика 300 вибрации может быть более удобным. Кроме того, путем присоединения первого ограничителя 3121 к подложке 221 напрямую через второй ограничитель 3122, прочность соединения между приемником 210 вибрации и подложкой 221 может быть повышена и конструктивная надежность датчика 300 вибрации может быть улучшена.
Следует заметить, что приведенные выше описания датчика 300 вибрации и его компонент служат только для иллюстрации и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 300 вибрации различные модификации и изменения и эти модификации и изменения также будут находиться в пределах объема настоящего раскрытия. Например, ограничитель 312 из датчика 300 вибрации может содержать несколько ограничителей (например, четыре ограничителя, пять ограничителей). Материал каждого ограничителя, ширина каждого ограничителя вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, и толщина каждого ограничителя вдоль направления вибрации блока 213 вибрации могут быть одинаковыми или отличающимися.
На фиг. 4 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществлениям настоящего раскрытия.
Конструкция датчика 400 вибрации, показанная на фиг. 4 может быть подобна конструкции датчика 300 вибрации, показанной на фиг. 3, с тем отличием, что конструкция блока вибрации является другой. Как показано на фиг. 4, блок 213 вибрации датчика 400 вибрации может дополнительно содержать второй упругий элемент 4133. Второй упругий элемент 4133 может быть расположен в первой акустической полости 214. Второй упругий элемент 4133 может быть соединен со вторым ограничителем 3122 и подложкой 221 акустического преобразователя 220, соответственно. Располагая второй упругий элемент 4133 в первой акустической полости 214, объем первой акустической полости 214 может быть уменьшен, тем самым, улучшая характеристики (например, чувствительность) датчика 400 вибрации. Например, уменьшая объем первой акустической полости 214, показатель изменения объема первой акустической полости 214, вызванного одинаковым смещением блока 213 вибрации, может быть выше, и изменение давления воздуха в первой акустической полости 214 может быть больше, повышая, таким образом, чувствительность датчика 400 вибрации.
В некоторых вариантах осуществления второй упругий участник 4133 может контактировать с упругим элементом 2132. В некоторых вариантах осуществления второй упругий элемент 4133 может не контактировать с упругим элементом 2132, то есть, второй упругий элемент 4133 может быть отделен от упругого элемента 2132 на определенное расстояние. В некоторых вариантах осуществления материал второго упругого элемента 4133 и материал упругого элемента 2132 могут быть одинаковыми или различающимися. В некоторых вариантах осуществления материал упругого элемента 2132 и/или материал второго упругого элемента 4133 могут содержать упругий коллоид, например, кремниевую резину, силикагель, силиконовый уплотнитель, силиконовый клей и т.п.
В некоторых вариантах осуществления второй упругий элемент 4133 может не контактировать с элементом 2131 массы, избегая, таким образом, функционального повреждения датчика 400 вибрации, вызванного влиянием второго упругого элемента 4133 на элемент 2131 массы во время процесса вибрации элемента 2131 массы. Например, между вторым упругим элементом 4133 и элементом 2131 массы вдоль направления вибрации блока 213 вибрации может иметься определенное расстояние. Расстояние может быть больше, чем максимальная амплитуда колебаний, возникающих, когда элемент 2131 массы вибрирует вдоль направления вибрации элемента 2131 массы.
В некоторых вариантах осуществления площадь второго упругого элемента 4133, ближнего к акустическому преобразователю 220, может быть равна площади второго упругого элемента 4133, дальнего от акустического преобразователя 220. Площадь второго упругого элемента 4133, ближнего к акустическому преобразователю 220, может относиться к площади поперечного сечения второго упругого элемента 4133, перпендикулярного направлению вибрации блока 213 вибрации. Например, форма проекции второго упругого элемента 4133 на плоскость, параллельную направлению вибрации блока 213 вибрации, может быть прямоугольником. В некоторых вариантах осуществления, когда второй упругий элемент 4133 контактирует с упругим элементом 2132, ширина второго упругого элемента 4133 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, может быть меньше, чем ширина упругого элемента 2132 вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, избегая, таким образом, контакта между вторым упругим элементом 4133 и элементом 2131 массы.
В некоторых вариантах осуществления площадь второго упругого элемента 4133, ближнего к акустическому преобразователю 220, может быть больше, чем площадь второго упругого элемента 4133, дальнего от акустического преобразователя 220. Например, форма проекции второго упругого элемента 4133 на плоскость, параллельную направлению вибрации блока 213 вибрации, может быть трапецией или треугольником. Сторона второго упругого элемента 4133, дальняя от второго ограничителя 3122 в направлении, перпендикулярном направлению вибрации блока 213 вибрации, может быть установлена как наклонная плоскость или дугообразная плоскость. Принимая площадь второго упругого элемента 4133, ближнего к акустическому преобразователю 220, большей, чем площадь второго упругого элемента 4133, дальнего от акустического преобразователя 220, объем первой акустической полости 214 может также быть уменьшен при предотвращении контакта между вторым упругим элементом 4133 и элементом 2131 массы, дополнительно улучшая, таким образом, чувствительность датчика 400 вибрации.
Следует заметить, что приведенные выше описания датчика 400 вибрации и его компонент служат только для иллюстрации и описания и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 300 вибрации различные модификации и изменения и эти модификации и изменения также будут находиться в пределах объема настоящего раскрытия. Например, ограничитель 312 из датчика 300 вибрации может быть однослойным ограничителем (например, ограничителем 212, показанным на фиг. 2).
На фиг. 5 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Конструкция датчика 500 вибрации, показанная на фиг. 5, может быть подобна конструкции датчика 200 вибрации, показанного на фиг. 2, с той разницей, конструкция упругого элемента является другой.
В некоторых вариантах осуществления, как показано на фиг. 5, упругий элемент 5132 датчика вибрации 500 может проходить до акустического преобразователя 220 и может быть соединен с акустическим преобразователем 220. Например, упругий элемент 5132 может проходить до подложки 221 и может быть соединяться с подложкой 221. Упругий элемент 5132, подложка 221 и блок 213 вибрации могут образовывать первую акустическую полость 214. Соединяя упругий элемент 5132 с подложкой 221 акустического преобразователя 220, объем первой акустической полости 214 может быть дополнительно уменьшен, тем самым, улучшая чувствительность датчика 500 вибрации.
В некоторых вариантах осуществления изменение температуры приемника 210 вибрации 210 во время процесса изготовления может заставить упругий элемент 5132 течь, вызывая проникновение упругого элемента 5132 на поверхность (также называемую “нижней поверхностью”) элемента 2131 массы, ближнюю к подложке 221, влияя, таким образом, на вибрацию элемента 2131 массы и влияя на чувствительность датчика 500 вибрации. В некоторых вариантах осуществления объем проникновения упругого элемента 5132 на нижнюю поверхность элемента 2131 массы может управляться, управляя общим объемом материалов, используемых в упругом элементе 5132 (например, количеством клея). Объем проникновения может относиться к зоне перекрытия площади проекции упругого элемента 5132 вдоль направления вибрации блока 213 вибрации и площади проекции элемента массы 2131 вдоль направления вибрации блока 213 вибрации. В некоторых вариантах осуществления объем проникновения упругого элемента 5132 может не превышать 25% площади проекции элемента массы 2131 вдоль направления вибрации блока 213 вибрации. Например, объем проникновения упругого элемента 5132 может не превышать 10% площади проекции элемента массы 2131 вдоль направления вибрации блока 213 вибрации.
Следует заметить, что приведенные выше описания датчика 500 вибрации и его компонент служат только для иллюстрации и описания и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 500 вибрации различные модификации и изменения и эти модификации и изменения также будут находиться в пределах объема настоящего раскрытия. В некоторых вариантах осуществления ограничитель 512 датчика 500 вибрации может иметь двухслойную конструкцию или многослойную конструкцию (смотрите ограничитель 312, показанный на фиг. 3). Например, ограничитель 212 датчика 500 вибрации может содержать первый ограничитель (не показанный на фиг. 5) и второй ограничитель (не показанный на фиг. 5). Когда ширина первого ограничителя и ширина второго ограничителя вдоль направления, перпендикулярного направлению вибрации блока 213 вибрации, отличаются, сторона упругого элемента 5132, ближняя к ограничителю 212, может быть реализована как ступенчатая конструкция так, что упругий элемент 5132 может быть тесно связан с первым ограничителем и вторым ограничителем, соответственно.
На фиг. 6 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Конструкция датчика 600 вибрации, показанная на фиг. 6, может быть подобна конструкции датчика 500 вибрации, показанного на фиг. 5, и различие может состоять в том, что конструкции упругого элемента и ограничителя отличаются.
В некоторых вариантах осуществления, как показано на фиг. 6, толщина ограничителя 212 вдоль направления вибрации блока 213 вибрации может быть равна толщине элемента 2131 массы вдоль направления вибрации блока 213 вибрации. В этой ситуации ограничитель 212 и элемент 2131 массы могут быть обработаны одновременно, упрощая, таким образом, процесс изготовления ограничителя 212 и элемент массы 2131. В некоторых вариантах осуществления, при изготовлении датчика 600 вибрации сначала ограничитель 212 и элемент 2131 массы могут быть расположен в одной и той же горизонтальной плоскости (т. е. сторона ограничителя 212, дальняя от подложки 221, может быть на одном уровне со стороной элемента 2131 массы, дальней от подложки 221). Затем упругий элемент 6132 может быть присоединен между ограничителем 212 и элементом 2131 массы. Воздух в отверстии погрузки 2211 звукового датчика может термически расширяться путем увеличения температуры, чтобы увеличить элемент 2131 массы, так чтобы сторона элемента 2131 массы, обращенная от подложки 221, могла быть еще более удалена от подложки 221, чем сторона ограничителя 212, обращенная от подложки 221, и может формироваться первая акустическая полость 214.
В некоторых вариантах осуществления, поскольку упругий элемент 6132 имеет определенную деформируемость, упругий элемент 6132 во время процесса изготовления датчика 600 вибрации может растягиваться и деформироваться (например, в процессе увеличения элемента 2131 массы), так что площадь первой стороны упругого элемента 6132 (стороны, ближней к элементу 2131 массы) может быть больше, чем площадь второй стороны упругого элемента 6132 (стороны, дальней от элемента 2131 массы).
Следует заметить, что приведенные выше описания датчика 600 вибрации и его компонент служат только для иллюстрации и описания и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 500 вибрации различные модификации и изменения и эти модификации и изменения также будут находиться в пределах объема настоящего раскрытия. В некоторых вариантах осуществления ограничитель 512 датчика 500 вибрации может иметь двухслойную конструкцию или многослойную конструкцию (смотрите ограничитель 312, показанный на фиг. 3).
На фиг. 7 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Конструкция датчика 700 вибрации, показанная на фиг. 7, может быть подобна конструкции датчика 500 вибрации, показанного на фиг. 5, и различие может состоять в том, что конструкция ограничителя отличается.
В некоторых вариантах осуществления, как показано на фиг. 7, ограничитель 712 может быть расположен между упругим элементом 2132 и корпусом 211. В некоторых вариантах осуществления ограничитель 712 может быть расположен вокруг упругого элемента 2132. Сторона упругого элемента 2132, ближняя к элементу 2131 массы, может физически присоединяться к элементу 2131 массы. Сторона упругого элемента 2132, ближняя к ограничителю 712, может быть физически присоединена к ограничителю 712. В некоторых вариантах осуществления ограничитель 712 может быть физически присоединен к подложке 221. В некоторых вариантах осуществления ограничитель 712 может не контактировать с корпусом 211. Например, ограничитель 712 может быть расположен на определенном расстоянии от корпуса 211. В некоторых вариантах осуществления ограничитель 712 может контактировать с корпусом 211. В некоторых вариантах осуществления упругий элемент 2132 может проходить до подложки 221 акустического преобразователя 220 и может физически соединяться с подложкой 221, так чтобы подложка 221, упругий элемент 2132 и элемент 2131 массы могли образовывать первую акустическую полость 214.
В некоторых вариантах осуществления толщина ограничителя 712 вдоль направления вибрации блока 213 вибрации может быть в пределах 100 мкм - 1000 мкм. Например, толщина ограничителя 712 вдоль направления вибрации блока 213 вибрации может быть в пределах 200 мкм - 500 мкм. В некоторых вариантах осуществления толщина ограничителя 712 вдоль направления вибрации блока 213 вибрации может быть равна толщине элемента 2131 массы вдоль направления вибрации блока 213 вибрации. В этой ситуации ограничитель 712 и элемент 2131 массы могут обрабатываться одновременно, упрощая, таким образом, процессы изготовления ограничителя 712 и элемент 2131 массы.
Следует заметить, что приведенные выше описания датчика 700 вибрации и его компонент служат только для иллюстрации и описания и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 500 вибрации различные модификации и изменения. Например, толщина ограничителя 712 вдоль направления вибрации блока 213 вибрации может быть больше или равна толщине упругого элемента 2132 вдоль направления вибрации блока 213 вибрации.
На фиг. 8 представлена примерная структурная схема датчика вибрации, соответствующего некоторым вариантам осуществления настоящего раскрытия.
Как показано на фиг. 8, датчик вибрации 800 может не содержать ограничитель. В некоторых вариантах осуществления, как показано на фиг. 8, упругий элемент 8132 может быть расположен вокруг элемента 2131 массы. Внутренняя сторона упругого элемента 8132 может быть физически присоединена к элементу 2131 массы. Внешняя сторона упругого элемента 8132 может быть физически присоединена к корпусу 211. В некоторых вариантах осуществления упругий элемент 8132 и подложка 221 может быть разнесены на определенное расстояние между ними в направлении вибрации блока 213 вибрации. Упругий элемент 8132, элемент 2131 массы, корпус 211 и подложка 221 могут образовывать первую акустическую полость 214. Упругий элемент 8132, элемент 2131 массы и корпус 211 может образовывать вторую акустическую полость 215.
В некоторых вариантах осуществления при формировании первой акустической полости 214 и второй акустической полости 215 расстояние (т.е. высота первой акустической полости 214) между элементом 2131 массы и подложкой 211 может управляться зажимным приспособлением (не показано на фиг. 8). Например, элемент 2131 массы может быть помещен в зажимное приспособление и элемент 2131 массы может подниматься, используя высоту зажимного приспособления. Затем элемент 2131 массы может соединяться с корпусом 211 через упругий элемент 8132 и управление высотой первой акустической полости 214 и второй акустической полости 215 может быть реализовано. Соединяя элемент 2131 массы с корпусом 211 через упругий элемент 8132 и корректируя расстояния между элементом 2131 массы и подложкой 211 путем использования зажимного приспособления, высота первой акустической полости 214 и высота второй акустической полости могут управляться более стабильно и точно, что может упростить процесс изготовления датчика 800 вибрации. Кроме того, конструкция элемента 2131 массы (например, имеет ли элемент 2131 массы отверстие) может не влиять на вышеупомянутый технологический процесс.
В некоторых вариантах осуществления толщина упругого элемента 8132 вдоль направления вибрации блока 213 вибрации может быть меньше, равна или больше, чем толщина элемента 2131 массы вдоль направления вибрации блока 213 вибрации.
На фиг. 9 представлена примерная структура датчика вибрации, соответствующая некоторым вариантам осуществления настоящего раскрытия.
Как показано на фиг. 9, в некоторых вариантах осуществления толщина упругого элемента 8132 вдоль направления вибрации блока 213 вибрации может быть больше, чем толщина элемента 8132 массы вдоль направления вибрации блока 213 вибрации. Например, две стороны упругого элемента 8132 вдоль направления вибрации блока 213 вибрации могут выступать относительно двух сторон элемента 2131 массы вдоль направления вибрации блока 213 вибрации. То есть, сторона упругого элемента 8132, ближняя к подложке 211, может быть ближе к подложке 211, чем сторона элемента 2131 массы, ближняя к подложке 211, и сторона упругого элемента 8132, дальняя от подложки 211, может быть удалена от подложки 21 дальше, чем сторона элемента 2131 массы, дальняя от подложки 211. Такое расположение может увеличить площадь соединения между упругим элементом 8132 и элементом 2131 массы, повышая, таким образом, прочность соединения между упругим элементом 8132 и элементом 2131 массы.
Следует заметить, что приведенные выше описания датчика 800 вибрации и его компонент служат только для иллюстрации и описания и не ограничивают объем настоящего раскрытия. Специалисты в данной области техники, руководствуясь настоящим раскрытием, могут вносить в датчик 800 вибрации различные модификации и изменения. Например, сторона упругого элемента 8132, ближняя к подложке 211, может находиться ближе к подложке 211, чем сторона элемента 2131 массы, ближняя к подложке 211, и сторона упругого элемента 8132, дальняя от подложки 211, может быть на одном уровне со стороной элемента массы 2131, дальней от подложки 211. Как другой пример, сторона упругого элемента 8132, ближняя к подложке 211, может быть на одном уровне со стороной элемента 2131 массы, ближней к подложке 211, и сторона упругого элемента 8132, дальняя от подложки 211, может быть более удалена от подложки 21, чем сторона элемента 2131 массы 2131, дальняя от подложки 211.
Обсудив, таким образом, базовые концепции, специалистам в данной области техники должно быть достаточно очевидно, это может быть довольно очевидно, что представленное выше подробное раскрытие предназначено представляться только как пример, но не как ограничение. Различные изменения, улучшения и модификации могут иметь место и предназначены для специалистов в данной области техники, хотя это здесь не заявлено. Эти изменения, улучшения и модификации предназначены предлагаться настоящим раскрытием и соответствуют сущности и объему защиты примерных вариантов осуществления настоящего раскрытия.
Кроме того, для описания вариантов осуществления настоящего раскрытия была использована определенная терминология. Например, термины “один из вариантов осуществления”, “вариант осуществления” и/или “некоторые варианты осуществления” означают, что конкретные признак, конструкция или характеристика, описанные в связи с вариантом осуществления, содержатся по меньшей мере в одном варианте осуществления настоящего раскрытия. Поэтому подчеркивается и следует понимать, что две или более ссылок на “вариант осуществления”, “один из вариантов осуществления” или “альтернативный вариант осуществления” в различных частях настоящего раскрытия не обязательно все относится к одному и тому же варианту осуществления. Дополнительно, конкретные признаки, конструкции или характеристики могут объединяться как соответствующие в одном или нескольких вариантах осуществления настоящего раскрытия.
Кроме того, специалисты в данной области техники должны понимать, что подходы настоящего раскрытия могут быть проиллюстрированы и описаны здесь в любом из многих патентоспособных классов или в контексте, содержащих любой новый и полезный процесс, машину, изготовление или состав вещества или их любое новое и полезное улучшение. Соответственно, различные подходы настоящего раскрытия могут быть реализованы полностью аппаратными средствами, полностью программными средствами (включая встроенное микропрограммное обеспечение, резидентное программное обеспечение, микрокод и т.д.) или объединенной реализацией программных и аппаратных средств, которые все могут обычно здесь упоминаться как “блок”, “модуль”, “механизм”, “устройство”, “компонент” или “система”. Кроме того, подходы настоящего раскрытия могут принимать форму компьютерного программного продукта, реализуемого на одном или более считываемых компьютером носителях, содержащих на них считываемую компьютером управляющую программу.
Считываемый компьютером сигнальный носитель может содержать распространяющийся сигнал данных, имеющий содержащуюся в нем считываемую компьютером управляющую программу, например, в основной полосе или как часть несущей волны. Такой распространяющийся сигнал может принимать любое множество форм, в том числе, электромагнитную, оптическую и т.п. или любое подходящее их сочетание. Носитель считываемого компьютером сигнала может быть любым считываемым компьютером носителем, который не является считываемым компьютером носителем для хранения данных и который может передавать, распространять или транспортировать программу для использования или в связи с системой исполнения команд, оборудованием или устройством. Управляющая программа, реализуемая на считываемом компьютером носителе сигнала, может передаваться с помощью любого соответствующего носителя, в том числе, беспроводной связи, проводную линию, оптоволоконный кабель, радиочастоту и т.п. или любое подходящее сочетание вышеперечисленного.
Управляющая компьютерная программа для выполнения операций, реализующих подходы настоящего раскрытия, может быть записана в любом сочетании одного или нескольких языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Scala, Smalltalk, Eiffel, JADE, Emerald, C++, C#, VB.NET, Python и т. п., стандартные языки процедурного программирования, такие как язык программирования «С», Visual Basic, Fortran 2003, Perl, COBOL 2002, PHP, ABAP, языки динамического программирования, такие как Python, Ruby и Groovy или другие языки программирования. Управляющая программа может выполняться полностью на компьютере пользователя, как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через любой тип сети, включая локальную сеть (LAN) или глобальную вычислительную сеть (WAN) или связь может быть установлена с внешним компьютером (например, через Интернет с помощью Интернет-провайдера) или в среде облачных вычислений или предложена как сервис, такой как Software as a Service (SaaS).
Дополнительно, указанный порядок обработки элементов или последовательностей или использование чисел, букв или других обозначений поэтому не предназначены для ограничения заявленных процессов и способов любым порядком, отличным от того, что может быть заявлено в формуле изобретения. Хотя вышеупомянутое раскрытие обсуждается через различные примеры, которые в настоящее время рассматриваются как множество полезных вариантов осуществления раскрытия, следует понимать, что такие подробности служат исключительно для этой цели и что добавленная формула изобретения не ограничивается раскрытыми вариантами осуществления, а наоборот, предназначены для охвата модификаций и эквивалентных построений, которые находятся в рамках сущности и объема раскрытых вариантов осуществления. Например, хотя реализация различных компонент, описанная выше, может быть осуществлена в устройстве, она может также быть осуществлена только как решение программного обеспечения, например, установкой на существующем сервере или на мобильном устройстве.
Аналогично следует понимать, что в предшествующем описании вариантов осуществления настоящего раскрытия различные признаки иногда группируются в единый вариант осуществления, чертеж или их описание в целях оптимизации раскрытия для помощи в понимании одного или нескольких различных вариантов осуществления. Этот способ раскрытия, однако, не должен интерпретироваться как отражающий намерение, чтобы заявленная сущность изобретения имела большее количество признаков, чем явно указано в каждом пункте формулы изобретения. Скорее заявленная сущность изобретения лежит менее, чем во всех признаках единого вышеупомянутого раскрытого варианта осуществления.
В некоторых вариантах осуществления числа, выражающие количества или свойства, используемые для описания и заявления определенных вариантов осуществления заявки, должны пониматься как изменяемые в некоторых случаях термином “примерно”, “приблизительно”, или “по существу”. Например, “примерно”, “приблизительно” или “по существу” может указывать на ±20-типроцентное изменение значения, которое описывается, если не указано иное. Соответственно, в некоторых вариантах осуществления, числовые параметры, приведенные в письменном описании и приложенной формуле изобретения, являются приближениями, которые могут варьироваться в зависимости от желаемых свойств, которые должны быть полученными конкретным вариантом осуществления. В некоторых вариантах осуществления числовые параметры должны истолковываться с точки зрения количества сообщаемых значащих цифр и применения обычных способов округления. Несмотря на то, что диапазоны чисел и параметры, устанавливающие широкий объем некоторых вариантов осуществления заявки, являются приближениями, численные значения, приведенные в конкретных примерах, сообщаются настолько точно, насколько возможно.
Каждый из патентов, патентных заявок, публикаций патентных заявок и других материалов, таких как статьи, книги, описания, публикации, документы, произведения и/или тому подобное, на которые здесь ссылаются, настоящим включаются сюда посредством ссылки во всех целях и во всей полноте, за исключением любых судебных архивных материалов, связанных с ними или с любыми из них, которые несовместимы или противоречат настоящим документам или любым из них, которые могут оказывать ограничивающее влияние в отношении самого широкого объема формулы изобретения, теперь или позже связанных с настоящим документом. Например, при наличии любого несоответствия или противоречия между описаниями, определением и/или использованием терминов, связанных с любым содержащимся материалом и связанных с настоящим раскрытием, описание, определение, и/или использование терминов, применяемых в настоящем раскрытии, должны превалировать.
В заключение следует понимать, что варианты осуществления заявки, раскрытые здесь, иллюстрируют принципы вариантов осуществления заявки. Другие модификации, которые могут использоваться, могут находиться в рамках объема защиты заявки. Таким образом, как пример, но не для ограничения, альтернативные конфигурации вариантов осуществления заявки могут быть использованы в соответствии с изложенными здесь принципами. Соответственно, варианты осуществления настоящего приложения не ограничиваются тем, что точно показано и описано.
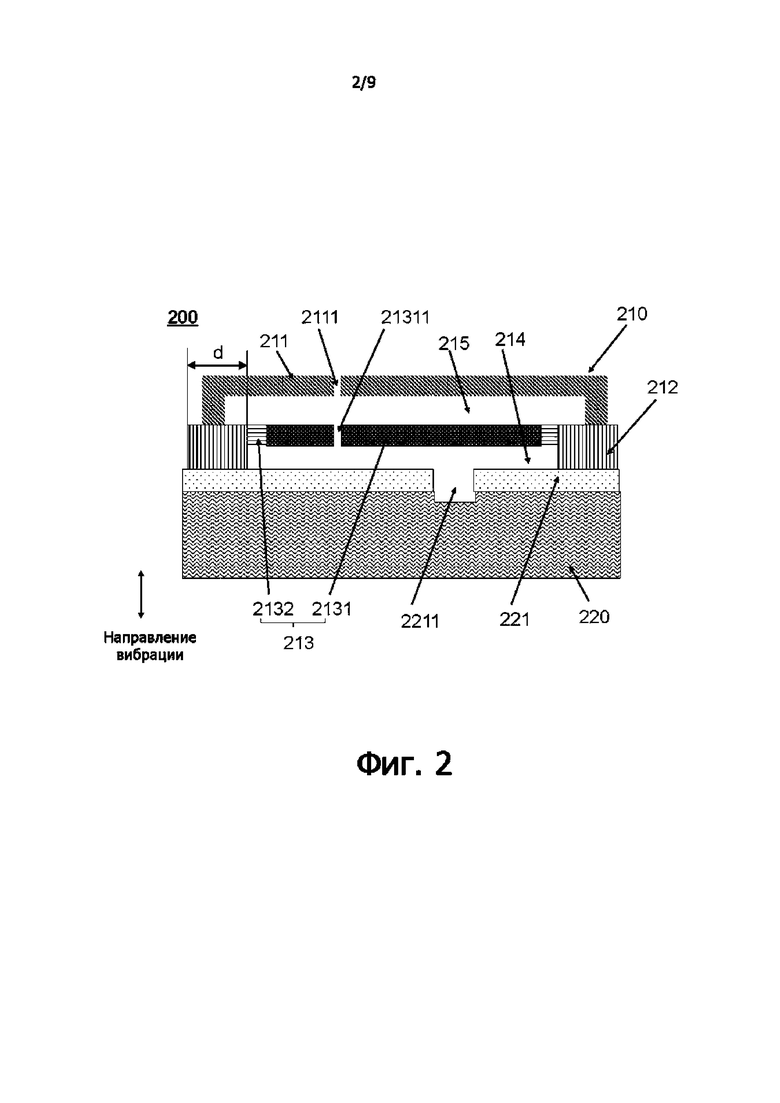
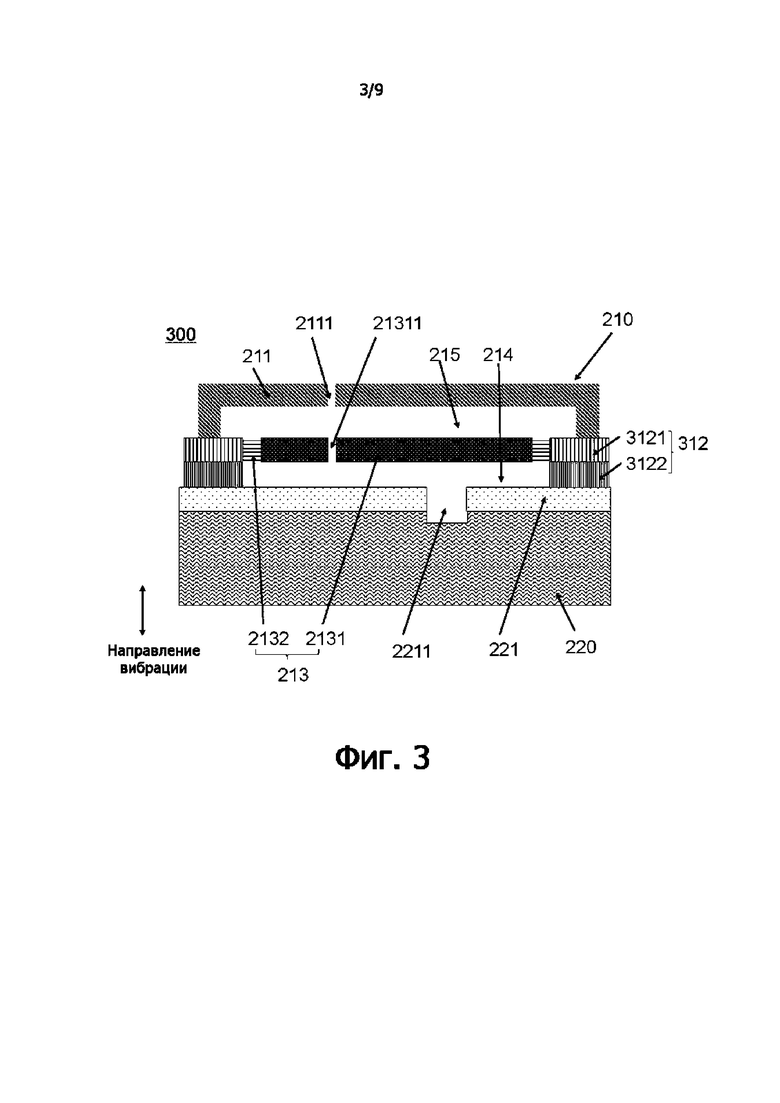
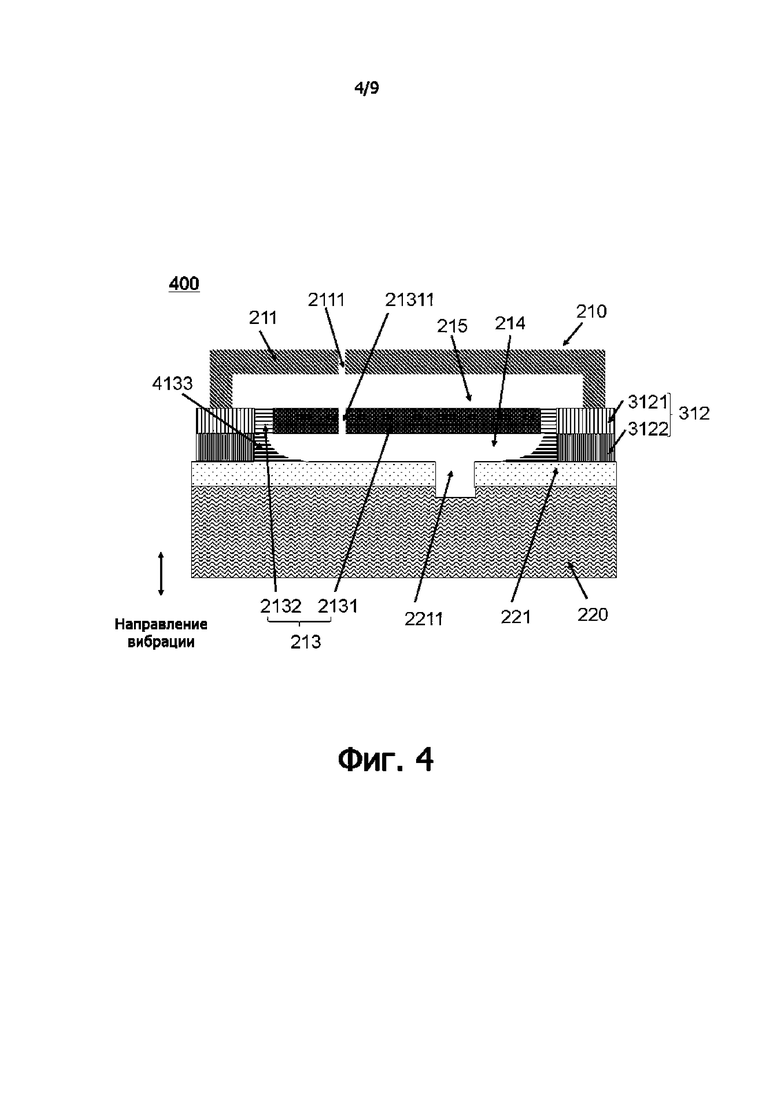
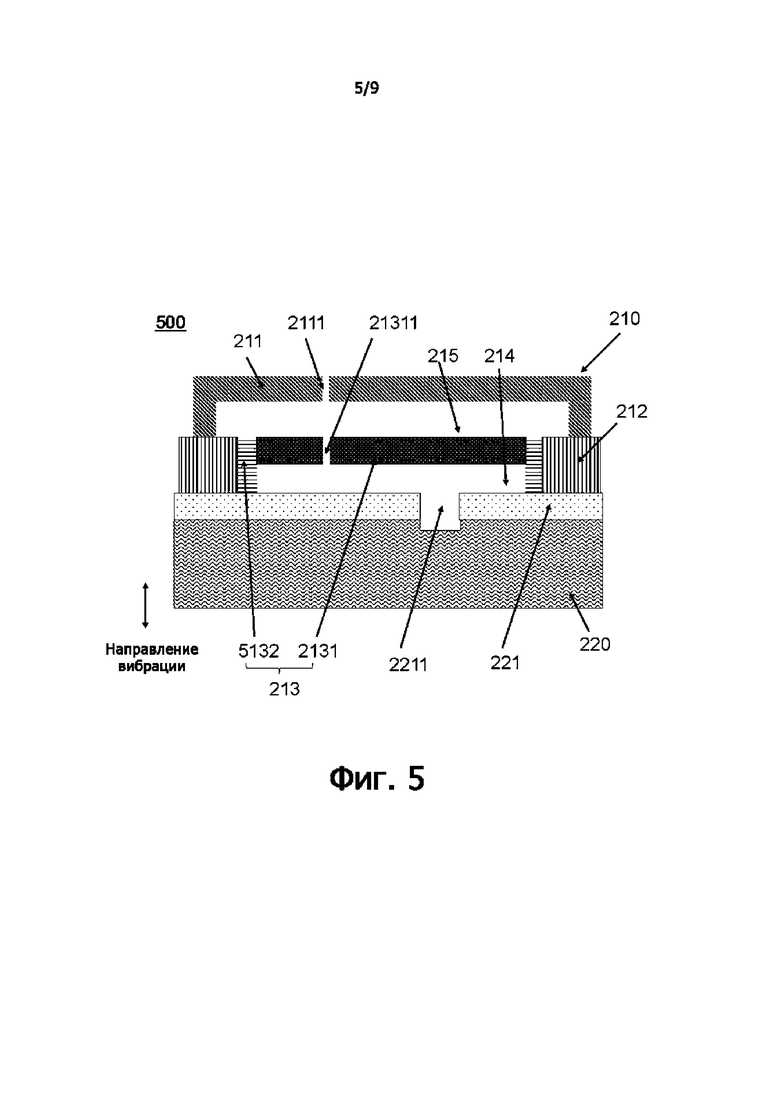
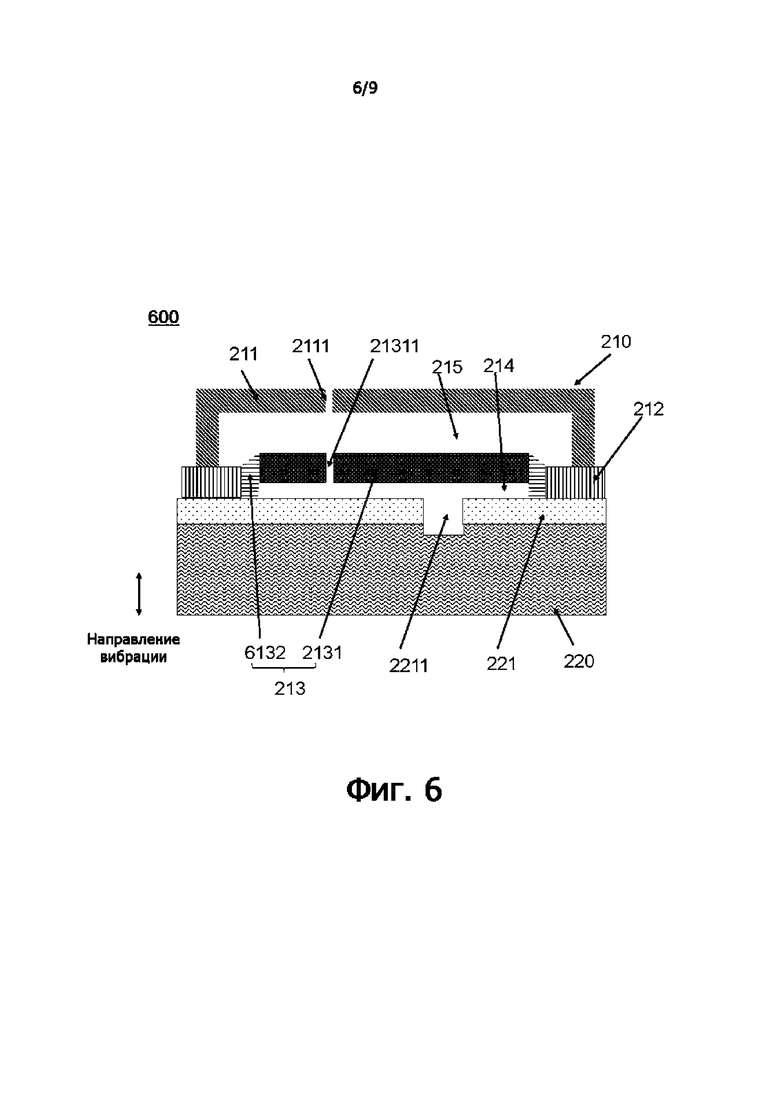
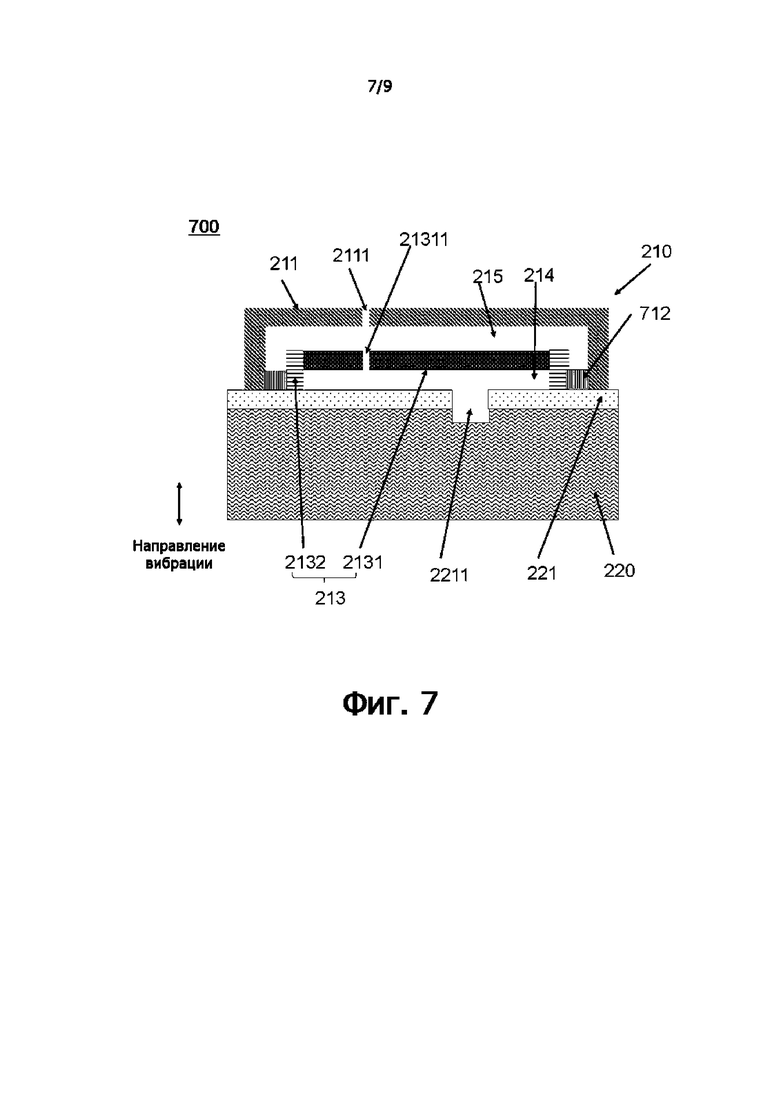
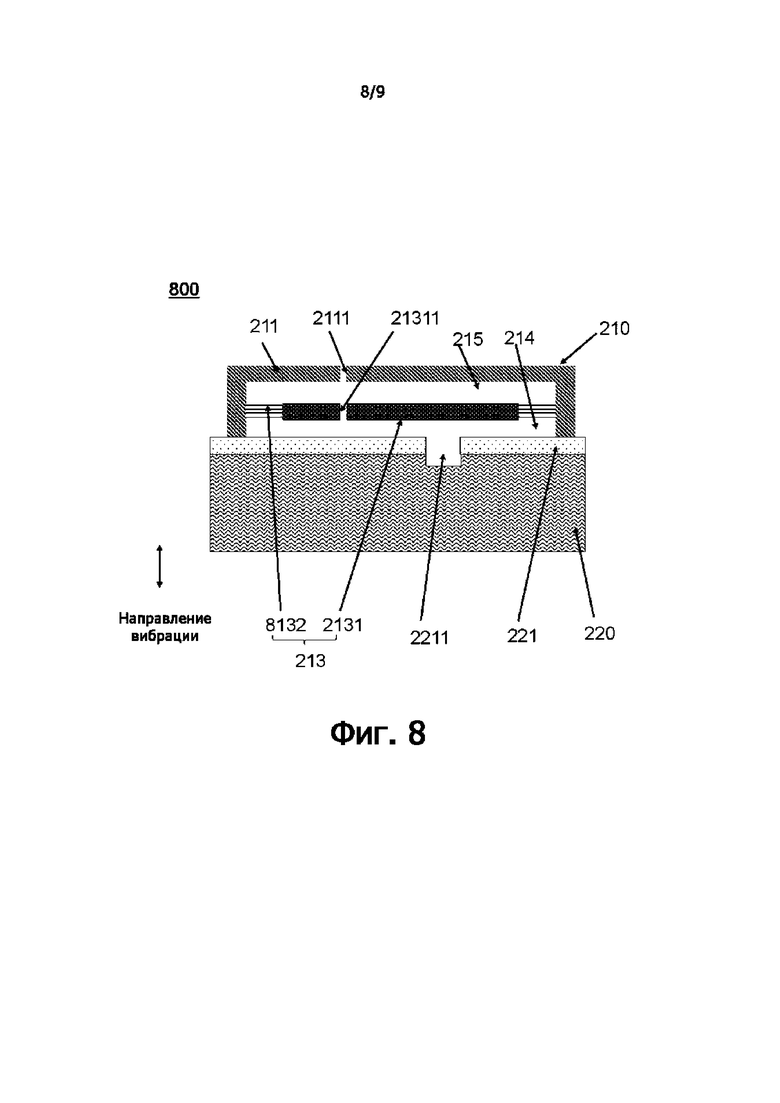
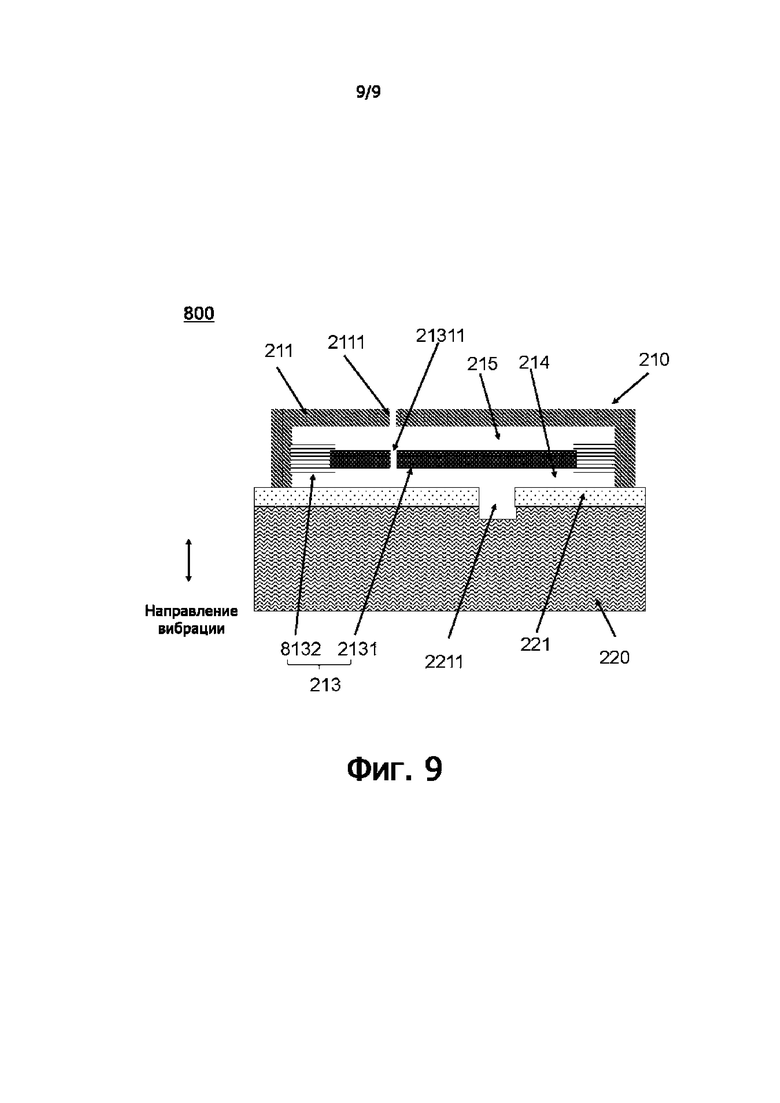
Изобретение относится к метрологии, в частности к датчикам измерений вибраций. Датчик вибрации содержит приемник вибрации и акустический преобразователь. Приемник вибрации содержит корпус, ограничитель и блок вибрации, корпус и акустический преобразователь образуют акустическую полость, блок вибрации расположен в акустической полости, чтобы разделять акустическую полость на первую акустическую полость и вторую акустическую полость, акустический преобразователь акустически связан с первой акустической полостью, корпус выполнен с возможностью формирования вибрации на основе внешнего сигнала вибрации, блок вибрации выполнен с возможностью изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса так, чтобы акустический преобразователь формировал электрический сигнал, блок вибрации содержит элемент массы и упругий элемент, первая сторона упругого элемента присоединена вокруг боковой стенки элемента массы, а вторая сторона упругого элемента соединена с ограничителем, причем первая сторона и вторая сторона упругого элемента расположены вдоль направления, перпендикулярного направлению вибрации блока вибрации. Технический результат – повышение чувствительности. 2 н. и 8 з.п. ф-лы, 9 ил.
1. Датчик вибрации, содержащий:
приемник вибрации и акустический преобразователь, при этом
приемник вибрации содержит корпус, ограничитель и блок вибрации,
корпус и акустический преобразователь образуют акустическую полость,
блок вибрации расположен в акустической полости, чтобы разделять акустическую полость на первую акустическую полость и вторую акустическую полость,
акустический преобразователь акустически связан с первой акустической полостью,
корпус выполнен с возможностью формирования вибрации на основе внешнего сигнала вибрации, блок вибрации выполнен с возможностью изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса, так чтобы акустический преобразователь формировал электрический сигнал,
блок вибрации содержит элемент массы и упругий элемент, первая сторона упругого элемента присоединена вокруг боковой стенки элемента массы, а вторая сторона упругого элемента соединена с ограничителем, причем первая сторона и вторая сторона упругого элемента расположены вдоль направления, перпендикулярного направлению вибрации блока вибрации.
2. Датчик вибрации по п. 1, в котором:
ограничитель расположен между корпусом и акустическим преобразователем, и
корпус, ограничитель и акустический преобразователь образуют акустическую полость.
3. Датчик вибрации по п. 2, в котором:
акустический преобразователь содержит подложку,
ограничитель соединен с подложкой,
ограничитель, блок вибрации и подложка образуют первую акустическую полость,
упругий элемент присоединен между ограничителем и элементом массы, и
упругий элемент и подложка расположены на некотором расстоянии друг от друга в направлении вибрации блока вибрации.
4. Датчик вибрации по п. 2 или 3, в котором:
толщина ограничителя вдоль направления вибрации блока вибрации больше, чем толщина элемента массы вдоль направления вибрации блока вибрации, и
сторона ограничителя, обращенная от акустического преобразователя, находится на одном уровне со стороной элемента массы, обращенной от акустического преобразователя.
5. Датчик вибрации по п. 2, в котором:
ограничитель содержит первый ограничитель и второй ограничитель,
первый ограничитель и второй ограничитель расположены последовательно вдоль направления вибрации блока вибрации,
первый ограничитель соединен с корпусом, и
второй ограничитель соединен с акустическим преобразователем.
6. Датчик вибрации по п. 5, в котором материал первого ограничителя отличается от материала второго ограничителя.
7. Датчик вибрации по п. 5 или 6, в котором:
блок вибрации содержит второй упругий элемент,
второй упругий элемент расположен в первой акустической полости, и
второй упругий элемент соединен соответственно со вторым ограничителем и акустическим преобразователем.
8. Датчик вибрации по п. 3, в котором:
упругий элемент проходит к подложке и соединен с подложкой, и
упругий элемент, элемент массы и подложка образуют первую акустическую полость.
9. Датчик вибрации по п. 8, в котором:
толщина ограничителя вдоль направления вибрации блока вибрации равна толщине элемента массы вдоль направления вибрации блока вибрации, и
площадь первой стороны упругого элемента больше, чем площадь второй стороны упругого элемента.
10. Датчик вибрации, содержащий:
приемник вибрации и акустический преобразователь, при этом
приемник вибрации содержит корпус и блок вибрации,
корпус и акустический преобразователь образует акустическую полость,
блок вибрации расположен в акустической полости, чтобы разделять акустическую полость на первую акустическую полость и вторую акустическую полость,
акустический преобразователь акустически связан с первой акустической полостью,
корпус выполнен с возможностью формирования вибрации на основе внешнего сигнала вибрации, блок вибрации выполнен с возможностью изменять звуковое давление в первой акустической полости в ответ на вибрацию корпуса, так чтобы акустический преобразователь формировал электрический сигнал,
блок вибрации содержит элемент массы и упругий элемент, и
упругий элемент присоединен вокруг боковой стенки элемента массы и проходит к корпусу, причем толщина упругого элемента вдоль направления вибрации блока вибрации больше толщины элемента массы вдоль направления вибрации блока вибрации.
| CN 209314103 U, 27.08.2019 | |||
| CN 101644718 B, 10.02.2010 | |||
| CN 212086490 U, 04.12.2020 | |||
| US 20200174033 A1, 04.06.2020 | |||
| EP 3567872 A1, 13.11.2019 | |||
| JP 0003128463 A, 31.05.1991 | |||
| CN 211930818 U, 13.11.2020 | |||
| CN104796824 B, 13.03.2018. |
