ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к формированию моделей текстуры и, в частности, к формированию моделей текстуры с помощью портативных сканеров, таких как трехмерные сканеры на основе структурированной подсветки и/или фотограмметрические сканеры.
УРОВЕНЬ ТЕХНИКИ
[0002] Целью компьютерной графики является точная модель физического внешнего вида объектов, включая их цвет, при разных условиях освещенности. Для этого необходимо иметь модель текстуры для объекта. Формирование физически точной модели является более сложным, чем простое фотографирование объекта для выявления его цвета. Например, когда человек фотографирует объект, фотография отображает только то, как выглядит объект при конкретных условиях освещенности, которые имели место во время фотографирования объекта. Кроме того, некоторые условия освещенности, такие как вспышка, могут оставить случайные блики на фотографии (например, области объекта, которые выглядят слишком яркими и блестящими).
[0003] Таким образом, если 3D модель объекта была текстурирована на основании таких фотографий (например, если модель текстуры была сформирована с применением таких фотографий) без какой-либо дополнительной обработки, 3D модель не будет выглядеть физически точной. Основная трудность в формировании физически точных моделей текстуры заключается в создании модели физических характеристик, которые влияют на внешний вид объекта, а не, например, характеристик, имеющихся в отдельной фотографии. Такая модель является наиболее полезной для анимаций, для того, чтобы текстуру объекта можно было показать с разных точек зрения и в различных условиях освещенности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В соответствии с некоторыми вариантами осуществления предложен способ формирования модели текстуры для объекта. Способ включает в себя сканирование объекта, имеющего поверхность. При сканировании формируются данные цвета из множества пространственных положений 3D сканера относительно объекта. Способ дополнительно включает в себя формирование с помощью по меньшей мере данных цвета пиксельной карты поверхности объекта, причем пиксельная карта содержит для каждого соответствующего пикселя из множества пикселей: значение цвета соответствующей точки на поверхности объекта; и значение для нецветового свойства соответствующей точки на поверхности объекта.
[0005] В соответствии с некоторыми вариантами осуществления предложена электронная система для формирования моделей текстуры объектов. Электронная система содержит сканер (например, портативный сканер, такой как портативный 3D сканер), который содержит один или более оптических датчиков, один или более процессоров и запоминающее устройство. В запоминающем устройстве хранятся команды, которые, при их исполнении одним или более процессорами, инициируют выполнение одним или более процессорами способов, описанных в настоящем документе.
[0006] В соответствии с некоторыми вариантами осуществления предложен постоянный машиночитаемый носитель данных. В постоянном машиночитаемом носителе данных хранятся команды, которые, при их выполнении электронной системой с одним или более процессорами, запоминающим устройством и портативным сканером, который содержит один или более оптических датчиков, инициируют выполнение одним или более процессорами способов, описанных в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0007] Для лучшего понимания различных описанных вариантов осуществления должна быть приведена ссылка на приведенное ниже описание вариантов осуществления вместе с прилагаемыми графическими материалами, на которых одинаковые ссылочные позиции обозначают соответствующие части на всех фигурах.
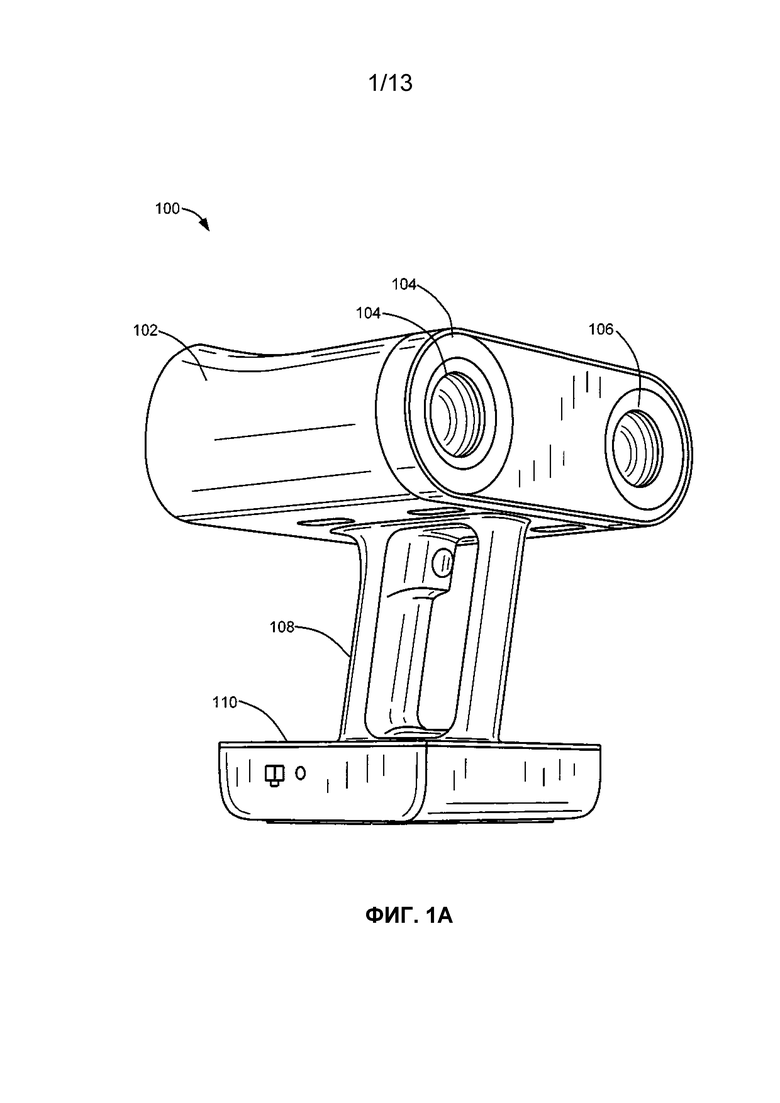
[0008] На Фиг.1A-1B представлены различные виды 3D сканера в соответствии с некоторыми вариантами осуществления.
[0009] На Фиг.2 представлена блок-схема 3D сканера в соответствии с некоторыми вариантами осуществления.
[0010] На Фиг.3 представлено схематическое изображение среды сбора данных в соответствии с некоторыми вариантами осуществления.
[0011] На Фиг.4 представлен пример возможного применения данных, полученных из среды сбора данных, показанной на Фиг.3 в соответствии с некоторыми вариантами осуществления.
[0012] На Фиг.5A-5C проиллюстрированы схематические примеры изображений поверхности объекта, применяемых для формирования текстурированного 3D представления объекта, в соответствии с некоторыми вариантами осуществления.
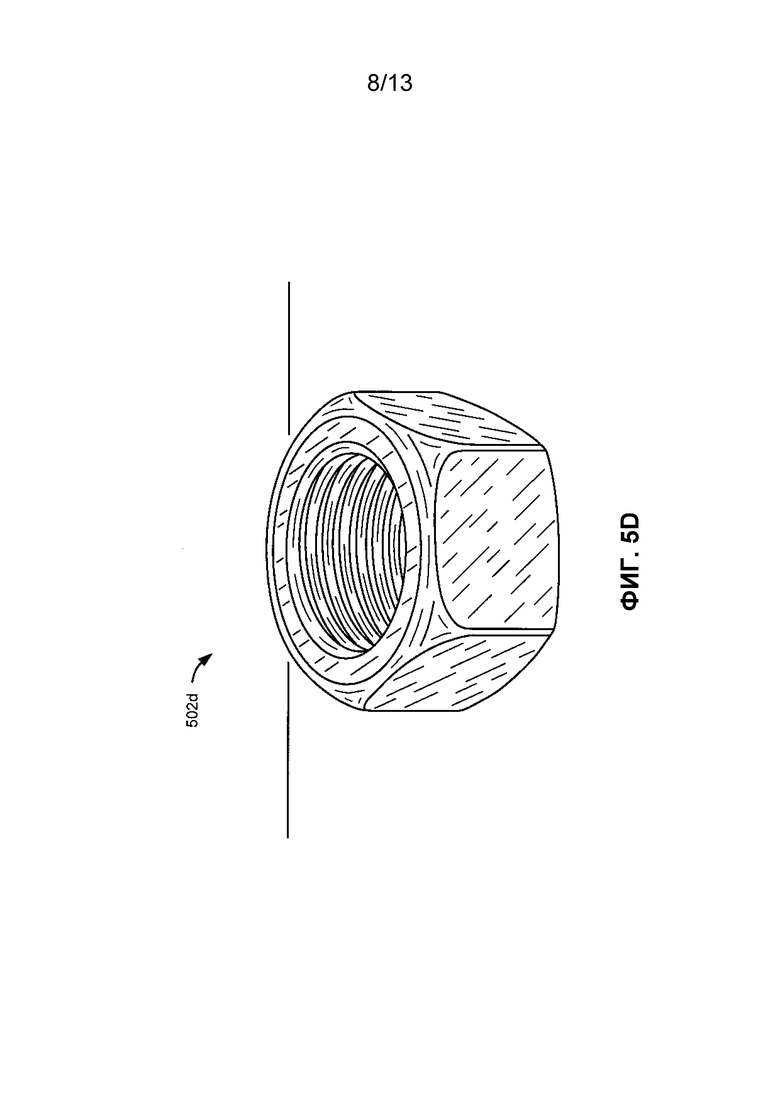
[0013] На Фиг.5D проиллюстрирован схематический пример текстурированного 3D представления объекта показанного на Фиг.5A-5C, сформированного в соответствии с некоторыми вариантами осуществления.
[0014] На Фиг.6 представлен сборочный чертеж 3D сканера в соответствии с некоторыми вариантами осуществления.
[0015] На Фиг.7A-7D представлена блок-схема способа формирования модели текстуры для объекта в соответствии с некоторыми вариантами осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0016] В описанных вариантах осуществления применяют данные цвета, полученные посредством портативного сканера, для формирования реалистичных карт текстуры объектов. В некоторых вариантах осуществления портативные сканеры представляют собой трехмерные (3D) сканеры (например, устройства, которые создают 3D модель поверхности объекта). Эти 3D сканеры применяют для формирования реалистичных текстурированных 3D представлений физических объектов. Некоторые 3D сканеры созданы на основе подхода структурированной подсветки, описанного ниже, при этом другие созданы на основе фотограмметрического подхода. Трехмерные сканеры применяют во многих областях, включая промышленное проектирование и производство, компьютерную анимацию, науку, образование, медицину, искусство, дизайн и другие.
[0017] С обычными 3D сканерами единственным типом информации о материале для каждого пикселя, доступной пользователю, является карта цветов, скомпонованная при несогласованной освещенности. С помощью таких сканеров на основании измеренных значений данной области поверхности объекта для каждого пикселя формируется значение красного, зеленого, синего (RGB - англ.: red, green, blue). Например, различные значения цвета для каждого пикселя усредняют или одно из значений цвета выбирают в качестве характерного (например, наиболее яркий пиксель). Иными словами, текстуры, формируемые этими сканерами, компонуют без учета характера изменения отраженного света, а также направления и интенсивности, при которых был зарегистрирован каждый пиксель цветовой текстуры. Полученные цветовые карты содержат несогласованную информацию об освещении и затенении и не содержат информации о материале, которая бы способствовала фотореалистической прорисовке объекта.
[0018] В качестве альтернативы, для обычных систем, которые специально спроектированы для формирования фотореалистических моделей текстуры материалов, обычно требуются сложные системы из точно позиционированных и тщательно откалиброванных источников света и камер.
[0019] Настоящее изобретение обеспечивает системы и способы, которые отделяют несогласованные освещенность и затенение от истинного цвета поверхности объекта с помощью портативного сканера (например, 3D сканера) без необходимости в сложных системах из точно позиционированных и тщательно откалиброванных источников света и камер. Кроме того, системы и способы, предложенные в настоящем документе, позволяют измерять свойства материала (отражательную способность, цвет зеркальности, металличность, шероховатость поверхности) для каждого пикселя карты текстуры для объекта. Это выполняют путем применения соответствующих пикселей из различных изображений поверхности объекта (например, зарегистрированных в разных пространственных положениях при перемещении сканера относительно объекта) вместе с данными отслеживания, которые предоставляют информацию о пространственных положениях, в которых были зарегистрированы различные значения. Иными словами, в некоторых вариантах осуществления 3D сканер собирает значения цвета (например, значения RGB) для разных пикселей и записывает углы, под которыми были зарегистрированы эти значения. Значения цвета от соответствующих пикселей связаны со свойствами материала посредством уравнений, которые описывают характер изменения падения света под разными углами на поверхность объекта (например, ламбертовская диффузная модель или более сложная модель текстуры). Данный процесс приводит к отдельному, скорректированному значению RGB для каждой пиксельной точки, тем самым устраняя случайные блики. Кроме того, можно вычислить свойства, такие как максимальное значение зеркальности и угол, при котором наблюдается данное значение.
[0020] Данные системы и способы позволяют достичь существенных улучшений текстуры моделей, сформированных путем 3D сканирования. Кроме того, эти системы и способы содействуют определению различных свойств материала.
[0021] Далее будут рассмотрены варианты осуществления, примеры которых проиллюстрированы на прилагаемых графических материалах. В последующем описании изложены многочисленные конкретные детали для обеспечения полного понимания различных описанных вариантов осуществления. Однако для специалиста в данной области техники будет очевидно, что различные описанные варианты осуществления могут быть осуществлены на практике без этих конкретных деталей. В иных случаях способы, процедуры, компоненты, схемы и сети, известные специалистам в данной области техники, не описываются подробно, чтобы неоправданно не затруднять понимание изобретательских аспектов вариантов осуществления.
[0022] На Фиг.1A-1B представлены виды спереди и сзади 3D сканера 100 в соответствии с некоторыми вариантами осуществления. В некоторых вариантах осуществления 3D сканер 100 применяют для получения данных, на основании которых можно сформировать реалистичные цветовые карты объектов. Однако, следует понимать, что 3D сканер 100 представляет собой только пример такого устройства. Для формирования реалистичных цветовых карт объектов в соответствии с вариантами осуществления настоящего изобретения можно также применять другие устройства (такие как фотограмметрические сканеры).
[0023] Сканер 100 содержит корпус 102 основной части, рукоятку 108 и батарейный отсек 110 (например, который содержит батарею). В некоторых вариантах осуществления 3D сканер 100 представляет собой портативный, переносной сканер. В связи с этим в некоторых вариантах осуществления 3D сканер 100 имеет размеры менее 30 см х 30 см х 30 см (например, соответствующие внутренним размерам коробки с размерами 30 см х 30 см х 30 см). В некоторых вариантах осуществления 3D сканер 100 является достаточно легким для ношения человеком в одной руке (например, 3D сканер 100 весит около 2,5 кг).
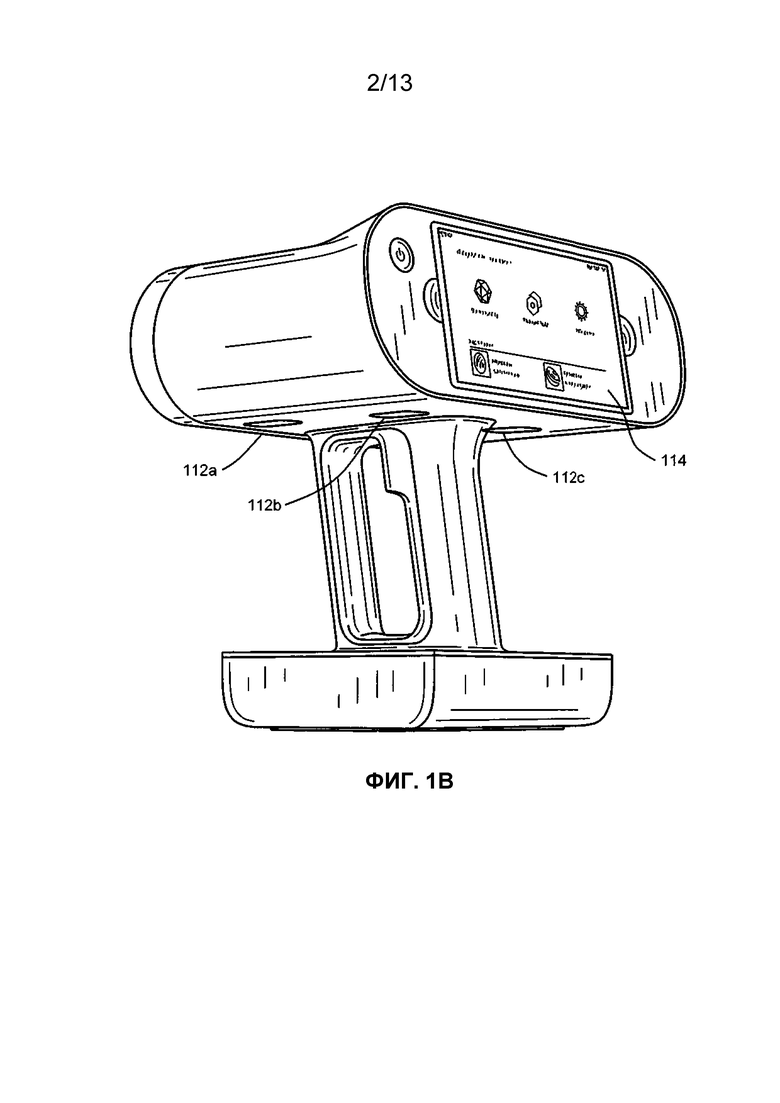
[0024] В некоторых вариантах осуществления корпус 102 основной части можно отделять от рукоятки 108. В некоторых вариантах осуществления корпус 102 основной части можно установить (например, без рукоятки 108 и батарейного отсека 110) на отдельном устройстве (например, сканирующем манипуляторе с электроприводом) посредством точек 112 крепления (например, точек 112a-112c крепления). Таким образом, 3D сканер 100 можно преобразовать из переносного сканера в промышленный или лабораторный сканер.
[0025] В некоторых вариантах осуществления 3D сканер 100 формирует 3D модель объекта путем проецирования пространственной структуры освещения (в настоящем документе упоминается как «структурированная подсветка») на поверхность объекта и при этом пространственную структуру освещения проецируют на поверхность объекта, получая посредством оптического датчика (например, камеры) изображение поверхности объекта. В связи с этим корпус 102 основной части вмещает один или более внутренних источников света (например, лазер 606 VCSEL, Фиг.6) и оптическую систему 104 источника. Один или более внутренних источников света проецируют свет стробоскопически (например, проецируют пульсирующий свет) с определенной частотой через пространственно-структурированный слайд, расположенный внутри корпуса 102 основной части (например, слайд 616, Фиг.6), через оптическую систему 104 источника на поверхность объекта. Изображения структурированной подсветки, спроецированные на поверхность объекта, получают посредством оптической системы 106 камеры, которая помещена в корпус 102 основной части. Одна или более камер/датчиков (например, ПЗС-детекторы 602, Фиг.6) записывает изображения структурированной подсветки, спроецированные на поверхность объекта. 3D модель формы поверхности объекта можно определить с помощью искажений в структуре света, спроецированного на поверхность объекта (т. е. когда искажения вызваны формой поверхности объекта), как более подробно описано в патенте США № 7 768 656, озаглавленном System and Method for Three-Dimensional Measurement of the Shape of Material Objects, содержание которого полностью включено в настоящий документ посредством ссылки.
[0026] В некоторых вариантах осуществления внутренние источники света представляют собой лазеры. В некоторых вариантах осуществления внутренние источники света представляют собой лазеры поверхностного излучения с вертикальным резонатором (VCSEL - англ.: vertical-cavity surface-emitting lasers). В некоторых вариантах осуществления 3D сканер 100 работает как источник света класса 1, что означает, что лазеры рассматриваются как источник света класса 1 в любой точке пространства снаружи корпуса 102 основной части (т. е. как определено в разделе 21 Свода федеральных правил (CFR - англ.: Code of Federal Regulations), часть 1040 на дату подачи настоящего изобретения).
[0027] Следует отметить, что в некоторых вариантах осуществления 3D сканер 100 обеспечивает достаточную освещенность поверхности объекта для того, чтобы изображения, полученные в дневных условиях на открытом воздухе имели отношение сигнал/шум достаточное для реконструкции 3D формы по меньшей мере части объекта (например, с точностью по меньшей мере 0,1 мм, 0,2 мм, 0,3 мм, 0,4 мм или 0,5 мм или, в качестве альтернативы, с разрешением 0,25 мм, 0,5 мм, 0,75 мм или 1 мм). Обычным подходом для обеспечения того, что лазер работает в диапазоне класса 1 является размещение лазера в большем корпусе таким образом, чтобы к моменту выхода света из корпуса свет был ослаблен в достаточной мере, чтобы рассматриваться как класс 1. Данный подход не подходит для переносных сканеров, поскольку переносные сканеры должны иметь относительно малый размер (например, менее 30 см х 30 см х 30 см). Некоторые варианты осуществления настоящего изобретения работают как источники света, помещенные в корпус 102 основной части, в качестве источников света класса 1 при соответствующем выборе длительности импульса, пиковой мощности, частоты повторения импульсов и/или коэффициента заполнения, позволяющих сканеру 100 быть переносным, безопасным и работать при обычных дневных условиях (например, при 120 000 люкс, 100 000 люкс, 20 000 люкс, 2000 люкс или 1000 люкс). Это позволяет сканеру 100 иметь относительно короткое минимальное рабочее расстояние (например, минимальное рабочее расстояние, которое не превышает 35 мм).
[0028] Кроме того, для увеличения отношения сигнал/шум от данных структурированной подсветки и для различения данных структурированной подсветки от данных текстуры (например, цвета) в некоторых вариантах осуществления описанные выше VCSEL лазеры работают на частоте, которая находится за пределами видимого спектра (например, частоте инфракрасного (ИК) диапазона). В таких вариантах осуществления корпус 102 основной части дополнительно вмещает объектив камеры (например, оптическую систему 106 камеры), светоделительное устройство ИК/видимого спектра, которое направляет свет ИК-диапазона к первому оптическому датчику (например, ПЗС-детектору 602-a, Фиг.6) и свет видимого диапазона ко второму оптическому датчику (например, ПЗС-детектору 602-b, Фиг.6). В некоторых вариантах осуществления данные от первого оптического датчика детектируются синхронно со стробоскопическим светом от одного или более внутренних источников света для того, чтобы данные со стробоскопической частотой детектировались преимущественно по отношению к информации на других частотах. Это можно выполнить, например, посредством синхронной демодуляции или стробирования первого оптического датчика для сбора данных синхронно с одним или более источников света, излучающих свет.
[0029] В некоторых вариантах осуществления второй оптический датчик, помещенный в корпус 102 основной части (например, ПЗС-детектор 602-b, Фиг.6), получает данные текстуры (например, данные цвета). В некоторых вариантах осуществления данные текстуры (например, изображения) применяют одновременно для прорисовки 3D реконструкции в цвете, а также для отслеживания положения и/или вращения сканера 100 (например, посредством фотограмметрического анализа), которые в свою очередь применяют для регистрации (например, согласования) данных структурированной подсветки (например, данных 3D формы), полученных 3D сканером 100 в разных положениях относительно объекта (например, описанных ниже со ссылкой на Фиг.3).
[0030] В некоторых вариантах осуществления корпус 102 основной части также вмещает один или более датчиков движения, которые отслеживают движение сканера 100. Один или более датчиков движения необязательно содержит 3-осевой акселерометр, 3-осевой гироскоп и 3-осевой магнитометр для измерения положения и/или вращения сканера 100. В некоторых вариантах осуществления один или более датчиков движения содержит все три из 3-осевого акселерометра, 3-осевого гироскопа и 3-осевого магнитометра и, таким образом, называется датчиком с девятью (9) степенями свободы (DOF - англ.: degree of freedom), несмотря на тот факт, что сканер 100 имеет только шесть механических степеней свободы (т. е. три степени свободы положения и три - вращения). Данные положения и/или вращения от одного или более датчиков движения применяют для отслеживания положения и/или вращения сканера 100 (например, путем применения фильтра Калмана), который в свою очередь применяют для регистрации (например, согласования) данных структурированной подсветки (например, данных 3D формы) и данных цвета (например, изображений), полученных сканером 100 в разных положениях относительно объекта (например, описанных ниже со ссылкой на Фиг.3).
[0031] Для облегчения встроенной обработки данных (например, для создания по меньшей мере начальной 3D реконструкции объекта), чтобы обеспечить пользователям возможность полностью мобильного сканирования, в некоторых вариантах осуществления корпус 102 основной части вмещает множество процессоров, содержащих одну или более программируемых пользователем вентильных матриц, один или более графических процессоров (ГП - англ.: graphical processing units) и/или один или более ЦП. В некоторых вариантах осуществления корпус 102 основной части содержит достаточно средств обработки для формирования по меньшей мере начальной реконструкции 3D модели объекта (например, предварительный просмотр 3D модели объекта).
[0032] В некоторых вариантах осуществления корпус 102 основной части дополнительно вмещает дисплей 114, который отображает графический интерфейс пользователя (GUI - англ.: graphical user interface) для сканера 100. Кроме того, в то время как сканер 100 сканирует объект, графический интерфейс пользователя для сканера 100 отображает начальную 3D реконструкцию объекта (например, предварительный просмотр 3D реконструкции объекта). В некоторых вариантах осуществления дисплей 114 представляет собой чувствительный к прикосновению дисплей (иногда называемый сенсорным дисплеем) и, таким образом, может также принимать вводимые пользователем данные (например, начать сканирование, приостановить сканирование, завершить сканирование и иным образом управлять сканером 100).
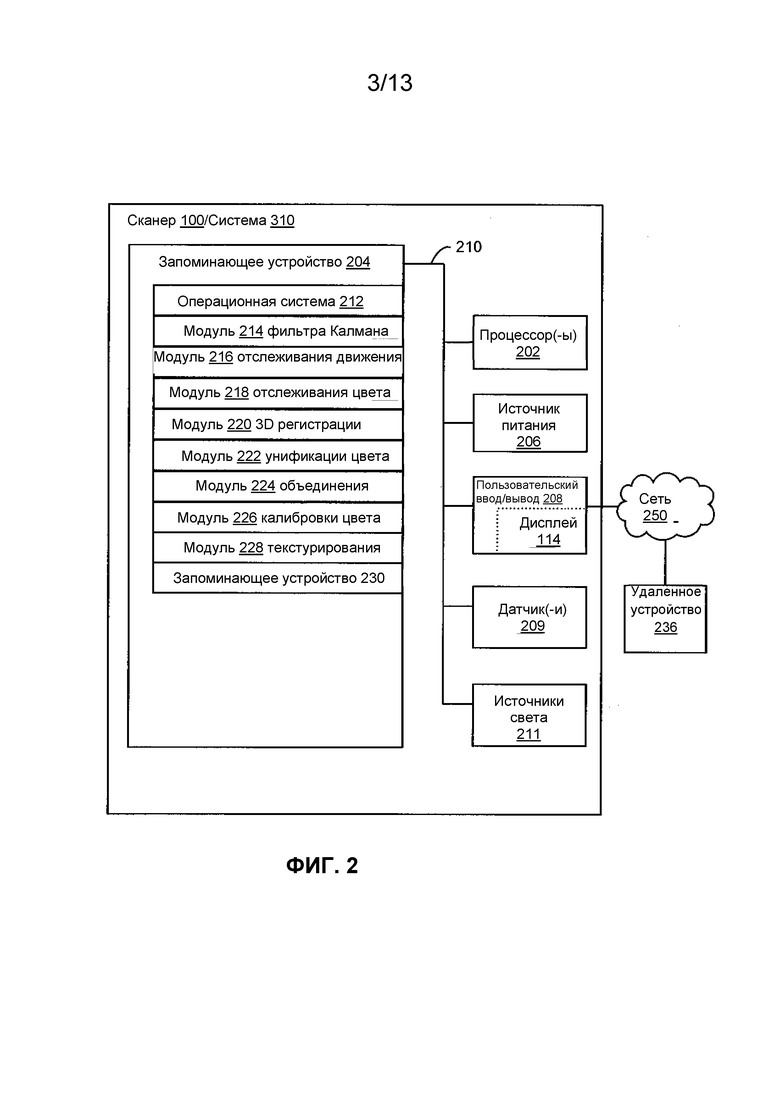
[0033] На Фиг.2 представлена блок-схема 3D сканера 100 и/или компьютерной системы 310 обработки 3D данных, которая принимает данные от 3D сканера 100 и выполняет обработку данных после получения в соответствии с некоторыми вариантами осуществления (совместно сканер 100 и система 310 называются «система 100/310»). Следует отметить, что в некоторых вариантах осуществления различные модули, описанные на Фиг.2, распределяют между 3D сканером и компьютерной системой 310 обработки 3D данных.
[0034] Система 100/310 обычно содержит запоминающее устройство 204, один или более процессор(-ов) 202, источник 206 питания, подсистему 208 пользовательского ввода/вывода, датчики 209, источники 211 света и коммуникационную шину 210 для соединения этих компонентов. Процессор(-ы) 202 выполняют модули, программы и/или команды, хранящиеся в запоминающем устройстве 204 и тем самым выполняют операции обработки.
[0035] В некоторых вариантах осуществления процессор(-ы) 202 содержат по меньшей мере один графический процессор. В некоторых вариантах осуществления процессор(-ы) 202 содержат по меньшей мере одну программируемую пользователем вентильную матрицу.
[0036] В некоторых вариантах осуществления в запоминающем устройстве 204 хранится одна или более программ (например, наборы команд) и/или структуры данных. В некоторых вариантах осуществления в запоминающем устройстве 204 или на постоянном машиночитаемом носителе данных запоминающего устройства 204 хранятся следующие программы, модули и структуры данных, или их подмножество или супермножество:
операционная система 212;
модуль 214 фильтра Калмана;
модуль 216 отслеживания движения;
модуль 218 отслеживания цвета;
модуль 220 3D регистрации;
модуль 222 унификации цвета;
модуль 224 объединения;
модуль 226 калибрования цвета;
модуль 228 текстурирования; и
запоминающее устройство 230, содержащее буфер(-ы), ОЗУ, ПЗУ и/или другое запоминающее устройство, в котором хранятся данные, применяемые и генерируемые системой 100/310.
[0037] Нет необходимости в том, чтобы реализовывать вышеуказанные модули (например, структуры данных и/или программы, содержащие наборы команд) в виде отдельных программных средств, процедур или модулей и, таким образом, различные подмножества этих модулей можно комбинировать или иным образом реорганизовывать в различных вариантах осуществления. В некоторых вариантах осуществления в запоминающем устройстве 204 хранится подмножество вышеуказанных модулей. Кроме того, в запоминающем устройстве 204 могут храниться дополнительные модули, не описанные выше. В некоторых вариантах осуществления модули, хранящиеся в запоминающем устройстве 204 или на постоянном машиночитаемом носителе данных запоминающего устройства 204, обеспечивают команды для реализации соответствующих операций в вышеописанных способах. В некоторых вариантах осуществления некоторые или все из этих модулей могут быть реализованы с помощью специализированных схем аппаратных средств (например, FPGA), которые включают часть или все функции модуля. Один или более вышеуказанных элементов можно выполнять посредством одного или более процессора(-ов) 202.
[0038] В некоторых вариантах осуществления подсистема 208 ввода/вывода соединяет с возможностью связи систему 100/310 с одним или более устройств, таких как одно или более удаленных устройств 236 (например, наружный дисплей) через коммуникационную сеть 250 и/или через проводное или беспроводное соединение. В некоторых вариантах осуществления коммуникационная сеть 250 представляет собой Интернет. В некоторых вариантах осуществления подсистема 208 ввода/вывода соединяет с возможностью связи систему 100/310 с одним или более интегрированных или периферийных устройств, таких как дисплей 114.
[0039] В некоторых вариантах осуществления датчики 209 содержат первый оптический датчик, который собирает 3D данные (например, первый ПЗС-детектор, такой как ПЗС-детектор 602-a, Фиг.6), второй оптический датчик, который собирает данные текстуры (например, цвет) (например, второй ПЗС-детектор, такой как ПЗС-детектор 602-b, Фиг.6) и датчик движения (например, датчик 9 DOF, который можно реализовать путем применения микроэлектромеханических систем (MEMS - англ.: microelectromechanical systems), гироскопов и одного или более датчиков Холла).
[0040] В некоторых вариантах осуществления источники 211 света содержат один или более лазеров. В некоторых вариантах осуществления один или более лазеров включают в себя лазеры поверхностного излучения с вертикальным резонатором (VCSEL - англ.: vertical-cavity surface-emitting lasers). В некоторых вариантах осуществления источники 211 света также содержат матрицу светоизлучающих диодов (LED - англ.: light emitting diodes), которые излучают свет видимой области спектра.
[0041] Коммуникационная шина 210 необязательно содержит схемы (иногда называемые набором микросхем), которые соединяют компоненты системы и управляют связью между ними.
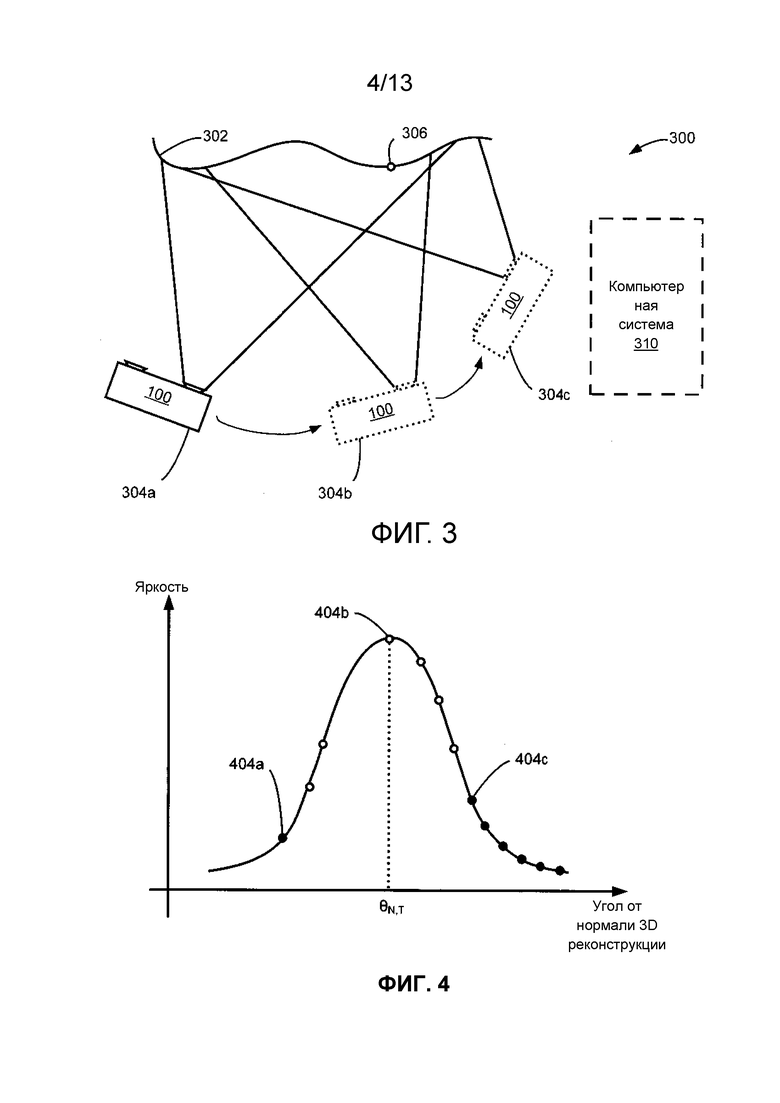
[0042] На Фиг.3 показано схематическое изображение среды 300 сбора данных в соответствии с некоторыми вариантами осуществления. В среде 300 сбора данных 3D сканер 100 сканирует объект 302, имеющий поверхность. При сканировании формируются данные цвета (например, цветные изображения поверхности объекта) из множества пространственных положений (например, из положений 304) 3D сканера 100 относительно объекта 302. Например, на Фиг.3 3D сканер перемещают из положения 304a (где получают первое цветное изображение) в положение 304b (где получают второе цветное изображение), в положение 304c (где получают третье цветное изображение). Следует отметить, что в некоторых вариантах осуществления одновременно с получением данных цвета (например, цветного изображения) 3D сканер 100 получает данные, соответствующие трехмерной (3D) форме (например, путем проецирования пространственной структуры освещения на поверхность объекта и, в то время как пространственную структуру освещения проецируют на поверхность объекта, получая изображения поверхности объекта (например, отличные от цветных изображений)).
[0043] Следует отметить, что каждое из первого цветного изображения (полученного с помощью 3D сканера 100 в положении 304a), второго цветного изображения (полученного с помощью 3D сканера 100 в положении 304b) и третьего цветного изображения (полученного с помощью 3D сканера 100 в положении 304c) регистрирует точку 306 на поверхности объекта 302. То есть имеется соответствующий пиксель в каждом из первого, второго и третьего цветных изображений, которые соответствуют точке 306 на поверхности объекта 302. В некоторых вариантах осуществления соответствующий пиксель в каждом из первого, второго и третьего цветных изображений имеет значение RGB, на основании которого может быть вычислена яркость в виде линейной комбинации значения красного (R), значения зеленого (G), значения синего (B) (например, функция светимости). Такое значение яркости иногда называют «относительной яркостью» и оно имеет значение, нормированное к 1 или 100.
[0044] В некоторых вариантах осуществления данные, полученные 3D сканером 100, передаются (например, через проводное или беспроводное соединение) в компьютерную систему 310 обработки 3D данных, где они принимаются. В некоторых вариантах осуществления компьютерная система 310 обработки 3D данных формирует пиксельную карту (например, карту текстуры) поверхности объекта. В качестве альтернативы, в некоторых вариантах осуществления пиксельную карту формируют посредством 3D сканера 100.
[0045] На Фиг.4 представлен пример возможного применения данных, полученных из среды 300 сбора данных, показанной на Фиг.3, в соответствии с некоторыми вариантами осуществления. В частности, на Фиг.4 проиллюстрированы данные, собранные из точки 306 на поверхности объекта 302. График на Фиг.4 иллюстрирует яркость различных пикселей данных из различных цветных изображений, полученных при различных пространственных положениях относительно поверхности объекта. В связи с этим в некоторых вариантах осуществления 3D сканер 100 и/или компьютерная система 310 обработки 3D данных определяет соответствие пиксель-уровень между пикселями в различных изображениях поверхности объекта (например, в предоставленном примере, регистрирует первое, второе и третье цветные изображения). В некоторых вариантах осуществления определение соответствия пиксель-уровень между пикселями в различных изображениях поверхности объекта включает в себя определение того, что первый пиксель в первом цветном изображении соответствует тому же положению на поверхности объекта, что и второй пиксель на втором цветном изображении.
[0046] Значения яркости наносят на график напротив угла от номинального вектора нормали для точки 306 на поверхности объекта. В некоторых вариантах осуществления номинальный вектор нормали представляет собой вектор нормали из 3D реконструкции объекта (например, реконструированный из данных, соответствующих трехмерной (3D) форме, полученной при сканировании).
[0047] Данные содержат первый пиксель из первого цветного изображения, имеющего яркость 404a, второй пиксель из второго цветного изображения, имеющий яркость 404b и третий пиксель из третьего цветного изображения, имеющий яркость 404c. В некоторых вариантах осуществления на основании этих данных определяют направление  «истинной нормали» (например, путем выбора угла, при котором был получен пиксель данных с максимальной яркостью, или соответствие данных заданной функции (например, функции Гаусса) и выбор угла, при котором соответствующая заданная функция имеет максимум, как более подробно описано со ссылкой на способ 700 на Фиг.7A-7C). В некоторых вариантах осуществления путем применения направления «истинной нормали» определяют диффузное значение (например, путем применения пикселей данных, полученных при углах, которые превышают заданный угол относительно направления истинной нормали - эти данные, показаны на Фиг.4 жирными точками, тогда как углы в пределах заданного угла показаны незакрашенными точками). Другие свойства материала, такие как параметр зеркальности, металличности, шероховатость поверхности можно определить с помощью направления истинной нормали.
«истинной нормали» (например, путем выбора угла, при котором был получен пиксель данных с максимальной яркостью, или соответствие данных заданной функции (например, функции Гаусса) и выбор угла, при котором соответствующая заданная функция имеет максимум, как более подробно описано со ссылкой на способ 700 на Фиг.7A-7C). В некоторых вариантах осуществления путем применения направления «истинной нормали» определяют диффузное значение (например, путем применения пикселей данных, полученных при углах, которые превышают заданный угол относительно направления истинной нормали - эти данные, показаны на Фиг.4 жирными точками, тогда как углы в пределах заданного угла показаны незакрашенными точками). Другие свойства материала, такие как параметр зеркальности, металличности, шероховатость поверхности можно определить с помощью направления истинной нормали.
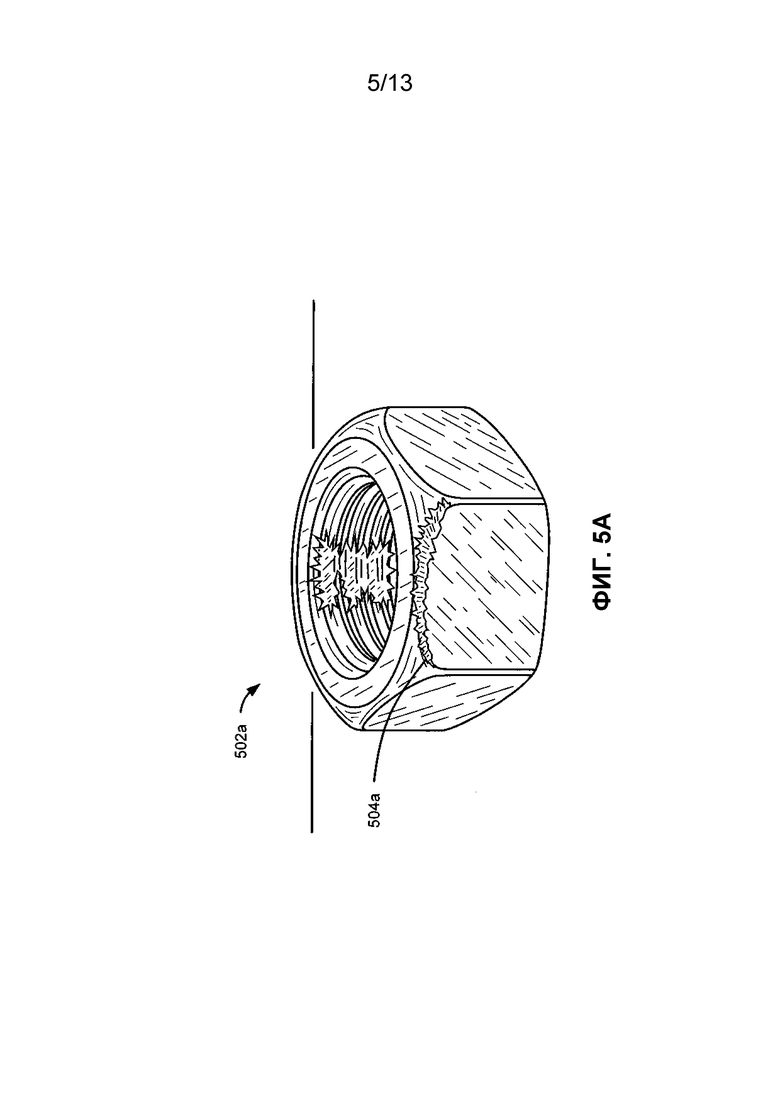
[0048] На Фиг.5A-5C проиллюстрированы схематические примеры (т. е. иллюстрации) изображений поверхности объекта, применяемых для формирования текстурированного 3D представления объекта в соответствии с некоторыми вариантами осуществления. Например, на Фиг.5A проиллюстрировано изображение 502a гайки, полученное из первого пространственного положения. На изображении 502a на гайке наблюдается случайный блик 504a (например, зеркальноподобное отражение от источника света, присутствующего при получении изображения 502a). Случайный блик 504a представляет собой зеркальное (например, зеркальноподобное) отражение от источника света, который присутствовал при получении изображения 502a. На Фиг.5B проиллюстрировано второе изображение 502b, полученное из второго пространственного положения, отличного от первого пространственного положения, а на Фиг.5C проиллюстрировано третье изображение 502c, полученное из третьего пространственного положения, отличного от первого и второго пространственных положений. На Фиг.5D проиллюстрирован пример текстурированного 3D представления 506 объекта (т. е. гайки), показанного на Фиг.5A-5C, сформированного в соответствии с некоторыми вариантами осуществления настоящего изобретения. Текстурированное 3D представление 506 объекта не содержит случайного блика (например, не содержит один или более бликов, которые присутствовали на изображениях поверхности объекта). Кроме того, текстурированное 3D представление 506 обеспечивает модель, которая более точно представляет текстуру (цвет) как объекта, так и стола, по сравнению с изображениями (необработанными данными), показанными на Фиг.5A-5C, таким образом, что текстура как объекта, так и стола может быть более точно отображена при различных условиях освещенности.
[0049] На Фиг.6 представлен чертеж, иллюстрирующий различные компоненты 3D сканера 100 в соответствии с некоторыми вариантами осуществления. В частности, на Фиг.6 проиллюстрирован поперечный разрез корпуса 102 основной части (Фиг.1). Как показано на Фиг.6, сканер 100 содержит (среди прочих компонентов):
Первый оптический датчик 602a (например, первый датчик с прибором с зарядовой связью (ПЗС)), который собирает 3D данные сканируемого объекта (например, собирает изображения структурированной подсветки, засвеченные и искаженные поверхностью объекта, из которых можно определить реконструкцию 3D формы). В некоторых вариантах осуществления первый оптический датчик 602a чувствителен к излучение в инфракрасной (ИК) области спектра (хотя первый оптический датчик 602a может быть также чувствителен к излучению в видимой области спектра);
Второй оптический датчик 602b (например, второй ПЗС-детектор), который собирает данные текстуры (например, цвет) от сканируемого объекта (например, собирает изображения в то время как структурированная подсветка не отображается на поверхности объекта, например, собирает изображения в промежутке между стробоскопическими импульсами структурированной подсветки, засвечивающими объект). В некоторых вариантах второй оптический датчик 602b чувствителен к излучению в видимой области спектра (хотя второй оптический датчик 602b может быть также чувствителен к излучению в ИК области спектра);
Светоделительное устройство 604, которое отделяет излучение в видимой области спектра от излучения в ИК области спектра. Светоделительное устройство 604 преимущественно направляет излучение в ИК области спектра, принятое через оптическую систему 106 камеры к первому оптическому датчику 602a и преимущественно направляет излучение в видимой области спектра, принятое через оптическую систему 106 камеры ко второму оптическому датчику 602b;
Источник 606 света. В некоторых вариантах осуществления источник 606 света представляет собой источник пульсирующего света (например, источник стробоскопического света). В некоторых вариантах осуществления источник 606 света представляет собой источник излучения в инфракрасной области спектра. В некоторых вариантах осуществления источник 606 света представляет собой лазер. В некоторых вариантах осуществления источник света 606 представляет собой лазер поверхностного излучения с вертикальным резонатором. В некоторых вариантах осуществления источник 606 света выполнен с возможностью работы (например, посредством соответствующего выбора длительности импульса, пиковой мощности, частоты повторения импульсов и/или коэффициента заполнения) как лазер класса 1 в любой точке пространства снаружи корпуса 102 основной части.
Слайд 616, который имеет образованную (например, напечатанную или вытравленную) на нем пространственную структуру, через которую свет проецируют на поверхность объекта (например, пространственная структура образована как непрозрачные и прозрачные участки слайда). Таким образом, свет, излучаемый источником 606 света проходит через слайд 616 и проецируется через оптическую систему 104 источника как структурированный свет к (например, на) поверхности объекта; и
Коллектор 608 охлаждения (помеченный в нескольких местах на чертеже), содержит цельный металлический элемент, находящийся в тепловом контакте с источником 606 света, оптическими датчиками 602 и множеством процессоров, включая ГП, расположенный в позиции 614 и FPGA, расположенную в позиции 612.
[0050] Ввиду способа получения 3D данных (например, стробоскопически излучаемый свет от достаточно мощного источника света, а также сбора и обработки многих изображений каждую секунду) выделение и отвод тепла представляет одну из наиболее сложных задач при проектировании носимого 3D сканера, выполненного с возможностью предварительного просмотра 3D реконструкций объектов в режиме реального времени. В то время как поддержание относительно низкой температуры является важным, поддержание постоянной температуры (как в пространстве, так и по времени) является по меньшей мере в равной степени важным. Коллектор 608 охлаждения поддерживает температуру различных компонентов 3D сканера 100 постоянной и стабильной путем обеспечения тепловой связи между основными теплогенерирующими компонентами 3D сканера. Таким образом, коллектор 608 охлаждения сокращает время «разогрева», необходимое 3D сканеру для достижения стабильной температуры, обеспечивая большую вычислительную мощность и увеличивая продолжительность времени, в течение которого 3D сканер может собирать данные.
[0051] На Фиг.7A-7D представлена блок-схема способа 700 формирования модели текстуры для объекта в соответствии с некоторыми вариантами осуществления. В некоторых вариантах осуществления способ 700 выполняют в сканере (например, отдельном портативном сканере) (например, 3D сканере 100 на Фиг.1A-1B или фотограмметрическом сканере). Портативный сканер содержит один или более оптических датчиков. В некоторых вариантах осуществления портативный сканер содержит дисплей. В некоторых вариантах осуществления портативный сканер представляет собой 3D сканер, который содержит процессоры для формирования 3D реконструкции по меньшей мере части формы поверхности объекта. В некоторых вариантах осуществления портативный сканер представляет собой портативный носимый сканер (например, имеющий размеры менее 30 см х 30 см х 30 см, такие, чтобы все устройство могло поместиться внутри коробки размером 30 см х 30 см х 30 см). В некоторых вариантах осуществления портативный сканер не представляет собой 3D сканер (например, портативный сканер представляет собой фотограмметрический сканер, который не формирует 3D реконструкцию формы объекта, а скорее формирует карту текстуры для существующей нетекстурированной 3D модели объекта). В некоторых вариантах осуществления сканер представляет собой фотограмметрический сканер, который формирует 3D реконструкцию поверхности объекта. Для простоты объяснения способ 700 описан как выполняемый 3D сканером 100. Однако, способ 700 можно выполнять с помощью любого портативного сканера, изготовленного в соответствии с настоящим изобретением. В некоторых вариантах осуществления одну или более операций способа 700 можно выполнять в компьютерной системе отдельно от портативного сканера (например, системе 310 на Фиг.3, которая выполняет обработку данных после получения для формирования модели текстуры). С другой стороны, в других вариантах осуществления 3D сканер 100 выполняет способы, отличные от способа 700 в соответствии с идеями настоящего изобретения. Некоторые операции в способе 700, необязательно, комбинируют и/или, необязательно, меняют порядок некоторых операций.
[0052] Способ 700 можно применять для отделения несогласованного освещения и затенения от истинного цвета поверхности объекта, сканированного с применением портативного сканера. Кроме того, способ 700 можно применять для определения свойств материала (отражательной способности, цвета зеркальности, металличности, шероховатости поверхности) для каждого пикселя карты текстуры для объекта. В связи с этим в некоторых вариантах осуществления в способе 700 применяют соответствующие пиксели из различных изображений поверхности объекта (например, зарегистрированные при различных пространственных положениях сканера относительно объекта) вместе с данными отслеживания, которые предоставляют информацию о пространственных положениях, в которых были зарегистрированы различные значения, для формирования однопиксельной карты текстуры (называемой ниже пиксельной картой). Значения цвета от соответствующих пикселей данных связаны со свойствами материала посредством уравнений, которые описывают характер изменения падения света под разными углами на поверхность объекта (например, ламбертовская диффузная модель или более сложная модель текстуры, также называемые моделью освещения и затенения). В некоторых вариантах осуществления в способе 700 получают отдельное, скорректированное значение RGB для каждой пиксельной точки, тем самым устраняя случайные блики (т. е. зеркальные отражения от источника света, присутствующие при получении данных цвета, которые не должны обязательно присутствовать при прорисовке текстурированной 3D реконструкции при разном освещении). В способе 700 дополнительно получают по меньшей мере одно значение на пиксель для нецветового свойства материала, такое как максимальное значение зеркальности и угол, при котором получено это значение (например, «истинная нормаль»).
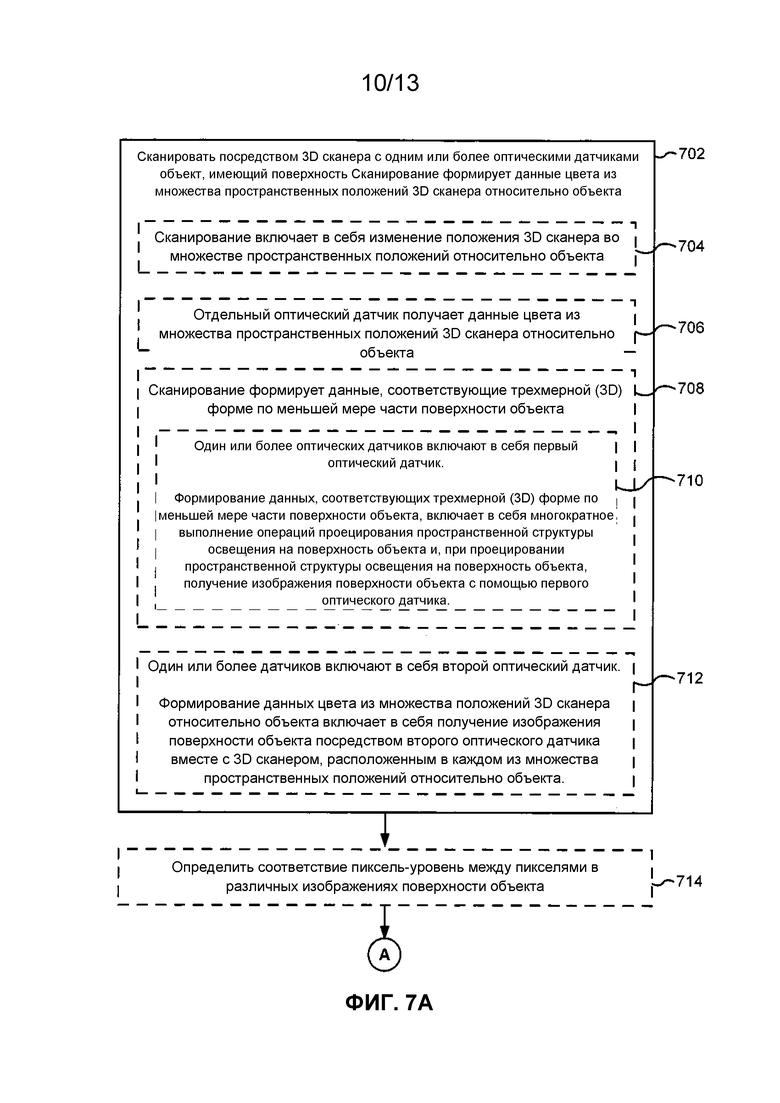
[0053] Как показано на Фиг.7A, 3D сканер 100 сканирует (702) объект, имеющий поверхность. При сканировании формируются данные цвета из множества пространственных положений 3D сканера 100 относительно объекта. В некоторых вариантах осуществления компьютерная система 310 обработки 3D данных отдельно от 3D сканера 100 принимает данные цвета, формируемые 3D сканером 100 из множества пространственных положений 3D сканера 100 относительно объекта (например, как описано со ссылкой на Фиг.3). В некоторых вариантах осуществления 3D сканер 100 не имеет предварительной информации о пространственных положениях 3D сканера 100 относительно объекта (например, пространственные положения не определяют заранее или не калибруют точно).
[0054] В некоторых вариантах осуществления сканирование включает в себя (704) изменение положения 3D сканера 100 во множестве пространственных положений относительно объекта. Например, как показано на Фиг.3, положение 3D сканера 100 изменяют из положения 304a к положению 304b, к положению 304c. 3D сканер 100 получает изображение объекта 302 в каждом из этих положений.
[0055] В некоторых вариантах осуществления отдельный оптический датчик получает (706) данные цвета из множества пространственных положений 3D сканера 100 относительно объекта (например, изменяют положение отдельного оптического датчика во время процесса сканирования). Как указано ниже, в некоторых вариантах осуществления 3D сканер 100 содержит дополнительные оптические датчики, которые получают данные, отличные от данных цвета.
[0056] В некоторых вариантах осуществления сканирование формирует (708) данные, соответствующие трехмерной (3D) форме по меньшей мере части поверхности объекта (например, данные, из которых можно реконструировать 3D форму по меньшей мере части поверхности объекта).
[0057] В некоторых вариантах осуществления один или более оптических датчиков содержат (710) первый оптический датчик (например, первый, инфракрасный, ПЗС) (например, ПЗС-детектор 602a, Фиг.6). В некоторых вариантах осуществления первый оптический датчик предназначен для формирования данных, соответствующих 3D форме по меньшей мере части поверхности объекта. Формирование данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта, включает в себя многократное выполнение операций проецирования пространственной структуры освещения на поверхность объекта и, при проецировании пространственной структуры освещения на поверхность объекта, получение изображения поверхности объекта с помощью первого оптического датчика.
[0058] В некоторых вариантах осуществления один или более оптических датчиков содержат (712) второй оптический датчик (например, второй, оптический, камера) (например, ПЗС-детектор 602b, Фиг.6). В некоторых вариантах осуществления второй оптический датчик предназначен для формирования данных цвета (например, второй оптический датчик представляет собой отдельный оптический датчик, описанный в операции 706). Формирование данных цвета из множества пространственных положений 3D сканера 100 относительно объекта включает в себя получение изображения поверхности объекта посредством второго оптического датчика вместе с 3D сканером 100, расположенным в каждом из множества пространственных положений относительно объекта. Следует отметить, что в таких вариантах осуществления множество пикселей из данных цвета применяют для формирования значений для отдельного пикселя пиксельной карты (например, где множество пикселей содержит соответствующие пиксели из различных изображений). Чтобы избежать недоразумений, пиксели изображений поверхности объекта иногда в настоящем документе упоминаются как «пиксели данных».
[0059] В некоторых вариантах осуществления изображения обеспечивают значения RGB для пикселей данных. В некоторых вариантах осуществления изображения, полученные вторым оптическим датчиком отличаются от изображений, полученных первым оптическим датчиком, которые применяют для формирования данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта. В некоторых вариантах осуществления изображения, применяемые для формирования данных цвета, получают в то время как не проецируют пространственную структуру освещения на поверхность объекта (например, в промежутке между проекциями пространственной структуры освещения на поверхность объекта).
[0060] В некоторых вариантах осуществления 3D сканер 100 определяет (714) соответствие пиксель-уровень между пикселями данных в различных изображениях поверхности объекта (например, регистрирует цветные изображения, полученные первым оптическим датчиком). В некоторых вариантах осуществления определение соответствия пиксель-уровень между пикселями в различных изображениях поверхности объекта включает в себя определение того, что первый пиксель в первом изображении соответствует тому же положению на поверхности объекта, что и второй пиксель на втором изображении (отличающемся от первого изображения).
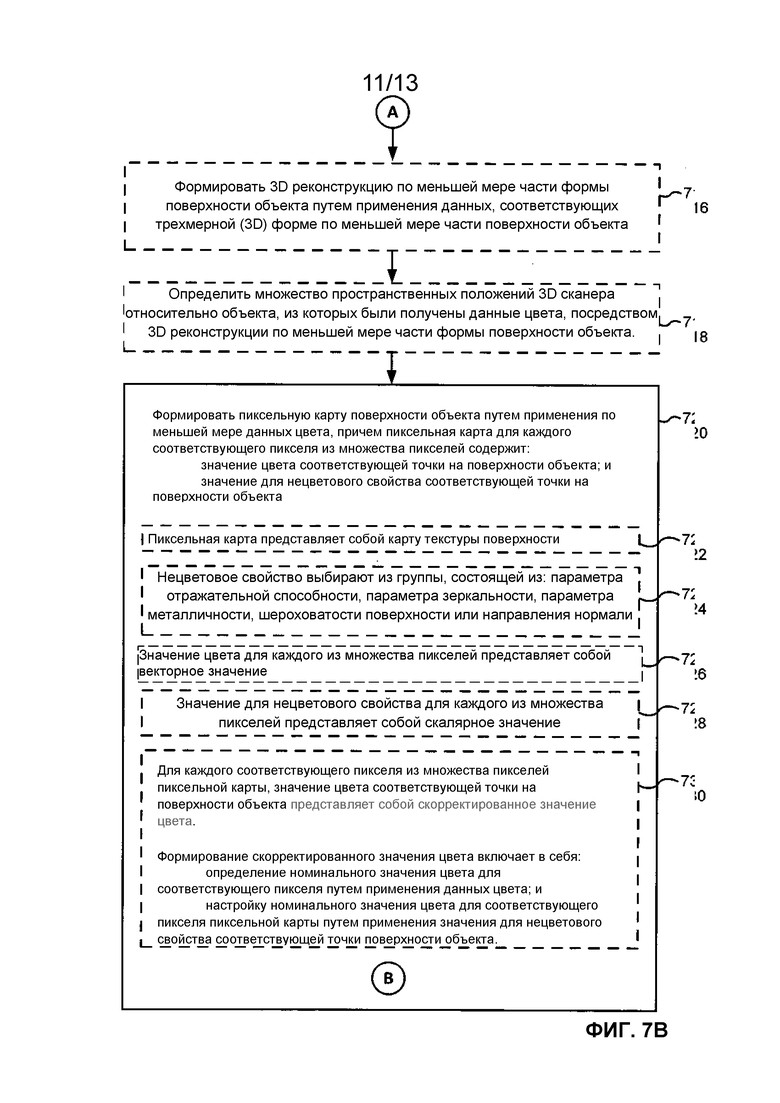
[0061] Со ссылкой на Фиг.7B, в некоторых вариантах осуществления 3D сканер 100 формирует (716) 3D реконструкцию по меньшей мере части формы поверхности объекта с помощью данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта. В некоторых вариантах осуществления соответствие пиксель-уровень определяют с помощью данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта (например, данные, соответствующие трехмерной (3D) форме по меньшей мере части поверхности объекта применяют для формирования 3D реконструкции, которую применяют для регистрации цветных изображений). В некоторых вариантах осуществления соответствие пиксель-уровень определяют с помощью регистрации изображения (например, выявления или сопоставления признаков или путем определения соответствий между изображениями). В некоторых вариантах осуществления соответствие пиксель-уровень определяют с помощью фотограммометрии (например, путем применения анализа изображений для определения, какой из двух пикселей в разных изображениях соответствует одному и тому же положению на поверхности объекта). В некоторых случаях положения камеры, а также 3D форма поверхности известны и соответствие пиксель-уровень вычисляют с помощью проективной геометрии.
[0062] В некоторых вариантах осуществления 3D реконструкция представляет собой полигональное представление объекта (например, полигональная сетка, содержащая множество многоугольников, причем каждый многоугольник из множества многоугольников представляет собой область поверхности объекта). Каждый многоугольник из множества многоугольников, таким образом, имеет номинальный вектор нормали. Определение соответствия пиксель-уровень между пикселями данных в разных изображениях поверхности объекта включает в себя выбор в качестве соответствующих пикселей из различных изображений, соответствующих области, представленной одним и тем же многоугольником (например, множество пикселей из различных изображений, представляющих один и тот же многоугольник, группируют вместе). Со ссылкой на Фиг.4, в некоторых вариантах осуществления номинальный вектор нормали представляет собой номинальный вектор нормали для многоугольника. В некоторых вариантах осуществления выбор в качестве соответствующих пикселей из различных изображений, соответствующих области, представленной одним и тем же многоугольником, включает в себя отображение данных цвета на системе координат 3D реконструкции объекта.
[0063] В некоторых вариантах осуществления 3D сканер 100 определяет (718) множество пространственных положений 3D сканера 100 относительно объекта, из которых были получены данные цвета, посредством 3D реконструкции по меньшей мере части формы поверхности объекта. В некоторых вариантах осуществления данные о движении (например, от датчика 9 DOF) также применяют для определения множества пространственных положений (например, определения углов, при которых были получены пиксели данных цвета относительно поверхности объекта). Например, информация из множества источников (например, 3D данные, данные цвета и данные о движении от датчика 9 DOF комбинируют для определения пространственных положений 3D сканера 100 относительно объекта для различных изображений).
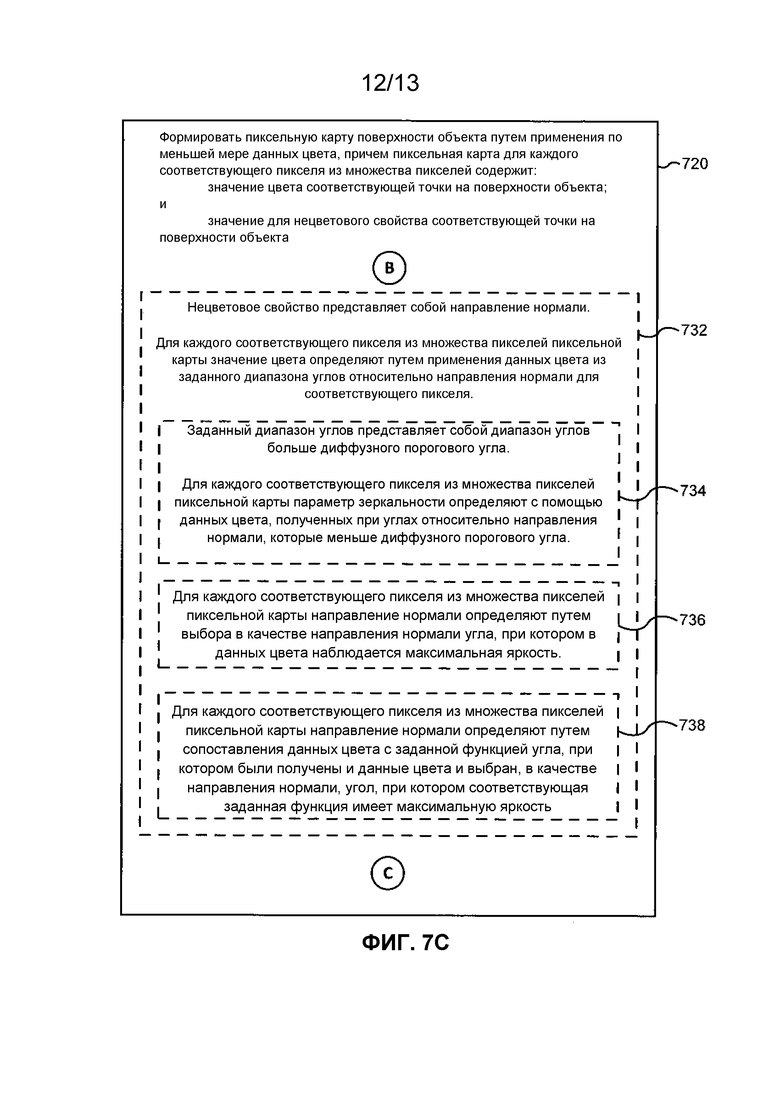
[0064] 3D сканер 100 формирует (720) пиксельную карту поверхности объекта с помощью по меньшей мере данных цвета. Пиксельная карта содержит для каждого соответствующего пикселя из множества пикселей: значение цвета соответствующей точки на поверхности объекта; и значение для нецветового свойства соответствующей точки на поверхности объекта. В некоторых вариантах осуществления пиксельная карта содержит значения для множества нецветовых свойств соответствующей точки на поверхности объекта для каждого соответствующего пикселя из множества пикселей. В некоторых вариантах осуществления пиксельная карта представляет собой (722) карту текстуры на поверхности объекта (например, содержащую набор значений для параметров, которые применяют вместе для фотореалистичного представления 3D модели). В некоторых вариантах осуществления значение цвета представляет собой диффузное значение для пикселя. В некоторых вариантах осуществления диффузное значение (например, значение RGB) представляет склонность материала рассеивать свет во всех направлениях (например, одинаково во всех направлениях). Следует отметить, что пиксели пиксельной карты, в отличие от пикселей данных (т. е. пикселей изображений), представляют область поверхности объекта. Таким образом, в некоторых случаях пиксели пиксельной карты упоминаются как «surfels» (т. е. элементы поверхности), при этом пиксельная карта упоминается как карта «surfel».
[0065] В некоторых вариантах осуществления нецветовое свойство представляет собой свойство текстуры (например, свойство, которое влияет на внешний вид соответствующей точки на поверхности объекта). В некоторых вариантах осуществления нецветовое свойство (или свойства) выбирают (724) из группы, состоящей из следующего: параметр отражательной способности, параметр зеркальности, параметр металличности, шероховатость поверхности или направление нормали. В некоторых вариантах осуществления параметр зеркальности представляет склонность, представляющую склонность материала рассеивать свет подобно зеркалу (например, с углом падения равным углу отражения).
[0066] В некоторых вариантах осуществления значение цвета для каждого из множества пикселей пиксельной карты представляет собой (726) векторное значение (например, значение RGB).
[0067] В некоторых вариантах осуществления значение для нецветового свойства для каждого из множества пикселей пиксельной карты представляет собой (728) скалярное значение (например, единственное значение между 0 и 1).
[0068] В некоторых вариантах осуществления для каждого соответствующего пикселя из множества пикселей пиксельной карты, значения цвета соответствующей точки на поверхности объекта (730) представляет собой скорректированное значение цвета (например, значение «истинной диффузии»). Формирование скорректированного значения цвета включает в себя: определение номинального значения цвета для соответствующего пикселя с помощью данных цвета (например, с помощью соответствующих пикселей от различных изображений поверхности объекта); и настройку номинального значения цвета для соответствующего пикселя пиксельной карты с помощью значения для нецветового свойства соответствующей точки на поверхности объекта (например, 3D сканер 100 применяет данные цвета для определения направления «истинной нормали» и применяет направление «истинной нормали» для определения значения «истинной диффузии»).
[0069] В некоторых вариантах осуществления настройку номинального значения цвета для пикселей пиксельных карт применяют для удаления случайных бликов (например, путем уменьшения интенсивности пикселей, которые выглядят чрезмерно яркими из-за отражений от вспышки и/или другого освещения). В обычных системах такие случайные блики удаляются вручную (например, художником). Таким образом, некоторые варианты осуществления настоящего изобретения устраняют необходимость в ручном удалении проблемных точек из данных текстуры.
[0070] Со ссылкой на Фиг.7C, в некоторых вариантах осуществления нецветовое свойство представляет собой (732) направление нормали. Для каждого соответствующего пикселя из множества пикселей пиксельной карты значение цвета определяют с помощью данных цвета из заданного диапазона углов относительно направления нормали для соответствующего пикселя.
[0071] В некоторых вариантах осуществления заданный диапазон углов представляет собой (734) диапазон углов больше диффузного порогового угла. Для каждого соответствующего пикселя из множества пикселей пиксельной карты параметр зеркальности определяют с помощью данных цвета, полученных при углах относительно направления нормали, которые меньше диффузного порогового угла.
[0072] В некоторых вариантах осуществления для каждого соответствующего пикселя из множества пикселей пиксельной карты направление нормали определяют (736) путем выбора в качестве направления нормали угла, при котором в данных цвета наблюдается максимальная яркость.
[0073] Например, в некоторых вариантах осуществления способ 700 включает определение, для каждого соответствующего пикселя из множества пикселей пиксельной карты, какой пиксель из соответствущих пикселей данных имеет наибольшую яркость. Угол, при котором был получен соответствующий пиксель данных с наибольшей яркостью, определяют как направление нормали (например, «истинной нормали»). Пиксели данных, полученные при углах, менее, например, 55° от этой «истинной нормали» применяют для определения настраиваемого значения цвета для соответствующего пикселя посредством модели диффузного отражения Ламберта для диффузной яркости:
 (1)
(1)
где  представляет собой яркость при наблюдаемом угле
представляет собой яркость при наблюдаемом угле  относительно направления нормали,
относительно направления нормали,  представляет собой энергию света, падающего на поверхность, и
представляет собой энергию света, падающего на поверхность, и  представляет собой диффузный цвет поверхности (также иногда называемый диффузное альбедо пикселя или «surfel»).
представляет собой диффузный цвет поверхности (также иногда называемый диффузное альбедо пикселя или «surfel»).
[0074] В некоторых вариантах осуществления параметр зеркальности (например, глянец или, наоборот, шероховатость) определяют для соответствующего пикселя путем вычитания максимального значения соответствующей модели диффузного отражения Ламберта (например, значения  ) из яркости пикселя данных, который имеет наибольшую яркость в соответствии со следующим уравнением рендеринга теории микрограней:
) из яркости пикселя данных, который имеет наибольшую яркость в соответствии со следующим уравнением рендеринга теории микрограней:
 (2)
(2)
где  представляет собой яркость отраженного излучения и
представляет собой яркость отраженного излучения и  представляет собой яркость при нормальном падении на поверхность.
представляет собой яркость при нормальном падении на поверхность.
[0075] В некоторых вариантах осуществления для каждого соответствующего пикселя из множества пикселей пиксельной карты направление нормали определяют (738) путем сопоставления данных цвета (например, предполагаемой яркости) с заданной функцией угла, при котором были получены данные цвета и выбор, в качестве направления нормали, угла, при котором соответствующая заданная функция имеет максимальную яркость. Пиксели данных, полученные при углах, менее, например, 55° от этой «истинной нормали» применяют для определения настраиваемого значения цвета для соответствующего пикселя посредством модели отражения Ламберта для диффузной яркости, как описано выше. Параметр зеркальности (например глянец или, наоборот, шероховатость) определяют для соответствующего пикселя путем вычитания максимального значения соответствующей модели отражения Ламберта (например, значения ) из наибольшего значения соответствующей предполагаемой яркости в соответствии с уравнением (2).
[0076] В более общем смысле, в некоторых вариантах осуществления способ 700 включает для каждого соответствующего пикселя из множества пикселей пиксельной карты применение первого подмножества данных цвета, соответствующих пикселю, для определения первого параметра (например, параметра зеркальности или направления истинной нормали) и применение второго подмножества данных цвета, соответствующих пикселю, отличных от первого подмножества данных цвета, для определения второго параметра (например, диффузного параметра). В некоторых вариантах осуществления, как описано выше, разделение на два подмножества данных цвета (данные для вычисления диффузного цвета и данные для вычисления цвета зеркальности) может основываться на угле, при котором были получены данные. В некоторых вариантах осуществления разделение на два подмножества данных цвета можно выполнить на основании других принципов или любой их вариации.
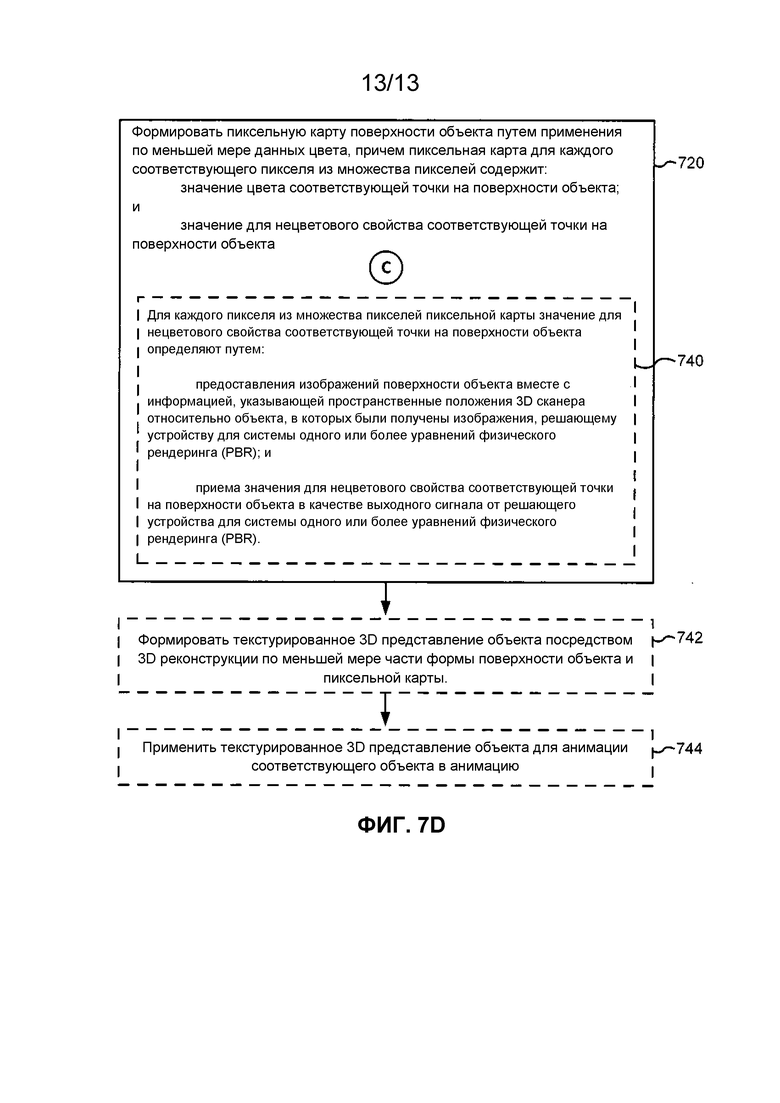
[0077] Со ссылкой на Фиг.7D, в некоторых вариантах осуществления для каждого пикселя из множества пикселей пиксельной карты значение для нецветового свойства соответствующей точки на поверхности объекта определяют (740) путем: предоставления решающему устройству для системы одного или более уравнений текстуры (например, уравнений освещения и затенения) (например, модель текстуры, которая может содержать уравнения затенения и/или модель отражения) изображений поверхности объекта вместе с информацией, указывающей пространственное положение 3D сканера 100 относительно объекта, при котором были получены изображения; и приема значения для нецветового свойства соответствующей точки на поверхности объекта в качестве выходных данных от решающего устройства для системы одного или более уравнений текстуры.
[0078] Следует отметить, что в некоторых вариантах осуществления модель текстуры содержит систему уравнений, которую обычно применяют для физического рендеринга. Таким образом, в некоторых вариантах осуществления операция 740 сводится к запуску модели физического рендеринга (PBR - англ.: physically-based rendering) в «обратном порядке». Обычно такие модели PBR применяются компьютерными аниматорами (например, для видеоигр или фильмов), которые вводят свойства материала, который они хотят выбрать и получить, в качестве выходных данных, предполагаемые цвета, которые зависят от освещения, выбранного аниматором. В операции 740 применяют в качестве входных данных предполагаемые цвета при различных углах и определяют свойства материала.
[0079] В некоторых вариантах осуществления модель текстуры представляет собой модель двумерной функции распределения отражательной способности объектов (BRDF - англ.: bidirectional reflectance distribution function). Например, модель диффузного отражения Ламберта может быть записана следующим образом:
 (3)
(3)
где  представляет собой единичный вектор в направлении источника света,
представляет собой единичный вектор в направлении источника света,  представляет собой единичный вектор в направлении смотрящего.
представляет собой единичный вектор в направлении смотрящего.
[0080] В некоторых вариантах осуществления модель текстуры представляет собой модель зеркальности микрограней на основе BRDF, такую как модель зеркального затенения микрограней Кука-Торренса или другую модель микрограней. Модель зеркального затенения микрограней Кука-Торренса предполагает, что поверхность содержит микрограни, каждая из которых зеркально отражает свет. Модель зеркального затенения микрограней Кука-Торренса может быть записана следующим образом:
 (4)
(4)
где  представляет собой единичный угловой бисектор и , n представляет собой единичный вектор нормали (например, единичный вектор в направлении «истинной нормали»). Функции D, F и G описаны ниже. В некоторых случаях модель Кука-Торренса применяют для определения значения параметра зеркальности (например, зеркального затенения) и модель отражения Ламберта применяют для определения диффузного значения.
представляет собой единичный угловой бисектор и , n представляет собой единичный вектор нормали (например, единичный вектор в направлении «истинной нормали»). Функции D, F и G описаны ниже. В некоторых случаях модель Кука-Торренса применяют для определения значения параметра зеркальности (например, зеркального затенения) и модель отражения Ламберта применяют для определения диффузного значения.
[0081] Только грани, которые являются перпендикулярными в направлении h вносят вклад в зеркальный компонент отражения от l к v. Таким образом, функция D(h) представляет собой функцию распределения наклона граней, которая соответствует части граней, которые ориентированы в направлении h. Функция D может быть записана следующим образом:
 (5)
(5)
где  представляет собой квадрат шероховатости.
представляет собой квадрат шероховатости.
[0082] Функция G представляет собой фактор геометрического затухания, который учитывает затенение или маскирование одной грани другой гранью и может быть записана следующим образом:
 (6)
(6)
 (7)
(7)
где k представляет собой параметр, специфичный для модели. Например, в некоторых вариантах осуществления, k относится к шероховатости материала.
[0083] Функция F представляет собой терм Френеля, который описывает как свет отражается от каждой гладкой микрограни, и может быть записан следующим образом:
 (8)
(8)
где  представляет собой зеркальное отражение при падении света под прямым углом.
представляет собой зеркальное отражение при падении света под прямым углом.
[0084] Следует отметить, что модели BRDF и формулы, описанные выше, включающие модель зеркального затенения микрограней Кука-Торренса являются только примерами моделей текстуры. Специалисту в данной области техники, ознакомленному с преимуществами данного изобретения, будет понятно, что можно применять любое количество моделей текстуры в соответствии с различными вариантами осуществления настоящего изобретения. Другие модели текстуры включают, помимо прочего, модель отражения Фонга, модель распределения Гаусса, модель распределения Бекмана, анизотропную модель Гейдриха-Зайделя и/или анизотропную модель Уорда.
[0085] Таким образом, некоторые варианты осуществления настоящего изобретения предполагают, что текстура поверхности на объекте может быть разложена (например, аддитивно) на множество свойств текстуры материала (например, яркость отраженного излучения и диффузная яркость) и что эти свойства текстуры могут быть связаны с наблюдениями цвета при модели текстуры. Если явно не указано обратное, приведенную ниже формулу изобретения не следует истолковывать как ограниченную конкретной моделью текстуры.
[0086] Кроме того, как можно было увидеть из приведенных выше уравнений, некоторые модели текстуры связывают местоположение одного или более источников света с наблюдаемым цветом. В некоторых вариантах осуществления 3D сканер содержит источник света. В некоторых вариантах осуществления источник света на 3D сканере по существу ярче любого источника света, наружного по отношению к 3D сканеру. Таким образом, в некоторых вариантах осуществления местоположение источника света известно и способ включает применение в уравнениях текстуры известного местоположения источника света. Например, способ включает предположение того, что зеркальные отражения обусловлены только источником света на 3D сканере и решение уравнений текстуры вне зависимости от любых источников света, расположенных снаружи 3D сканера (например, решение уравнений текстуры включает предположение того, что окружающее освещение является незначительным по сравнению со светом, излучаемым источником света на 3D сканере).
[0087] В некоторых вариантах осуществления 3D сканер 100 формирует (742) текстурированное 3D представление объекта посредством 3D реконструкции по меньшей мере части формы поверхности объекта и пиксельной карты.
[0088] В некоторых вариантах осуществления 3D сканер 100 применяет (744) текстурированное 3D представление объекта для того, чтобы анимировать соответствующий объект в анимацию (например, путем отображения карты цветов на полигональную координатную сетку 3D реконструкции объекта).
[0089] В некоторых вариантах осуществления нецветовое свойство представляет собой направление нормали, и направления нормали на пиксельной карте, применяют для целей метрологии, осмотра и контроля качества (например, осмотра поверхности, обнаружения царапин и трещин и т.д.). В некоторых вариантах осуществления 3D сканер 100 обнаруживает одну или более трещин (или царапин) и отображает (например, на встроенном дисплее или на дисплее, отдельном от 3D сканера 100) 3D представление объекта с визуальной индикацией, отображающей местоположение трещин (или царапин). В некоторых вариантах осуществления в соответствии с определением того, что объект поцарапан (или треснут) сверх указанного порогового значения (например, порогового значения обеспечения качества), 3D сканер 100 формирует отчет, указывающий, что объект поцарапан (или треснут) сверх указанного порогового значения.
[0090] В некоторых вариантах осуществления 3D сканер 100 отображает (например, на встроенном дисплее или дисплее, отдельном от 3D сканера 100) пиксельную карту (например, отображает текстурированное 3D представление объекта). В некоторых вариантах осуществления 3D сканер 100 отображает значения цвета пиксельной карты без отображения значений нецветовых свойств пиксельной карты (например, отображает текстурированное 3D представление объекта только с диффузным цветом). В некоторых вариантах осуществления 3D сканер 100 отображает значения нецветовых параметров пиксельной карты без отображения значений цвета пиксельной карты (например, отображает текстурированное 3D представление объекта только с диффузным цветом). В некоторых вариантах осуществления 3D сканер 100 принимает пользовательский ввод и в ответ на пользовательский ввод переключается между отображением текстурированного 3D представления объекта, отображением значений цвета пиксельной карты и отображением значений для нецветового свойства (или свойств) (например, в ответ на прием пользовательского ввода 3D сканер 100 переходит от отображения текстурированного 3D представления объекта к отображению значений цвета пиксельной карты или значений для нецветового свойства; или в ответ на прием пользовательского ввода 3D сканер 100 переходит от отображения значений цвета пиксельной карты к отображению текстурированного 3D представления объекта или отображению значений для нецветового свойства; или в ответ на прием пользовательского ввода 3D сканер 100 переходит от отображения значений нецветового свойства к отображению текстурированного 3D представления объекта или отображению значений цвета пиксельной карты).
[0091] Вышеприведенное описание, в целях пояснения, было приведено со ссылкой на конкретные варианты осуществления и графические материалы. Однако, вышеприведенное описание не является исчерпывающим и не ограничивает изобретение конкретными описанными формами. Возможны многие модификации и вариации, принимая во внимание вышеизложенные идеи. Варианты осуществления были выбраны и описаны в порядке, который наилучшим образом поясняет принципы изобретения и его практическое применение, в целях обеспечения специалистов в данной области техники возможностью наилучшего применения изобретения и различных описанных вариантов осуществления с различными модификациями, подходящими для определенного предусмотренного вида применения.
[0092] Кроме того, следует понимать, что, хотя термины первый, второй и т. д. в некоторых случаях приводятся в настоящем документе для описания различных элементов, эти элементы не должны ограничиваться этими терминами. Эти термины применяются только для отличения одного элемента от другого. Например, первый датчик может называться вторым датчиком, и, аналогичным образом, второй датчик может называться первым датчиком, без отступления от объема различных описанных вариантов осуществления. Первый датчик и второй датчик одновременно являются датчиками, но они не являются одним и тем же датчиком, если контекст явным образом не указывает на иное.
[0093] Терминология, применяемая в описании различных описанных вариантов осуществления в настоящем документе, предназначена исключительно для описания конкретных вариантов осуществления и не должна рассматриваться как ограничивающая. Применяемые в описании различных описанных вариантов осуществления и в прилагаемой формуле все формы единственного числа также включают в себя формы множественного числа, если контекст явно не указывает на иное. Кроме того, следует понимать, что термин «и/или» в контексте настоящего документа означает и охватывает любые возможные комбинации одного или более связанных перечисляемых элементов. Кроме того, следует понимать, что термины «включает», «включающий», «содержит» и/или «содержащий» в контексте настоящего описания указывают на наличие указанных признаков, целых величин, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одного или более иных признаков, целых величин, этапов, операций, элементов, компонентов и/или их групп.
[0094] В контексте настоящего документа термин «если» необязательно приводится в значении «когда» или «при», или «в ответ на определение», или «в ответ на обнаружение», в зависимости от контекста. Аналогичным образом, фразу «если это определено» или «если обнаружено [указанное состояние или событие]», необязательно, толковать как означающую «после определения» или «в ответ на определение», или «после обнаружения [указанного состояния или события]», или «в ответ на обнаружение [указанного состояния или события]», в зависимости от контекста.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УДАЛЕНИЯ НЕВИДИМЫХ ПОВЕРХНОСТЕЙ ТРЁХМЕРНОЙ СЦЕНЫ | 2017 |
|
RU2680355C1 |
| ТРЕХМЕРНЫЙ СКАНЕР С ОБРАТНОЙ СВЯЗЬЮ ПО СБОРУ ДАННЫХ | 2019 |
|
RU2767590C2 |
| ТРЕХМЕРНЫЙ СКАНЕР С ОБРАТНОЙ СВЯЗЬЮ ПО СБОРУ ДАННЫХ | 2019 |
|
RU2793584C2 |
| ОБРАБОТКА ОБЛАКА ТОЧЕК | 2019 |
|
RU2767775C1 |
| СИСТЕМА И СПОСОБ ДЛЯ НАНЕСЕНИЯ ИЗМЕНЯЮЩЕГО ОТРАЖАТЕЛЬНУЮ СПОСОБНОСТЬ ВЕЩЕСТВА В ЦЕЛЯХ УЛУЧШЕНИЯ ВИЗУАЛЬНОЙ ПРИВЛЕКАТЕЛЬНОСТИ ЧЕЛОВЕЧЕСКОЙ КОЖИ | 2006 |
|
RU2367577C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ 3D ПОРТРЕТА ЧЕЛОВЕКА С ИЗМЕНЕННЫМ ОСВЕЩЕНИЕМ И ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ НЕГО | 2021 |
|
RU2757563C1 |
| КОМПОНУЮЩИЙ АДМИНИСТРАТОР ОКОН РАБОЧЕГО СТОЛА | 2004 |
|
RU2360284C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ ТОЧЕК ТРЕХМЕРНОЙ (3D) СЦЕНЫ | 2018 |
|
RU2788439C2 |
| СИСТЕМА И СПОСОБ РЕКОНСТРУКЦИИ СВОЙСТВ ПОВЕРХНОСТИ И ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОЦИФРОВАННЫХ 3D ОБЪЕКТОВ | 2022 |
|
RU2806729C1 |
| ДИНАМИЧЕСКАЯ АРХИТЕКТУРА ОКОН | 2004 |
|
RU2377663C2 |



Изобретение относится к генерированию текстурных моделей с использованием подвижных сканеров. Сущность заявленного изобретения заключается в следующем. При сканировании объекта генерируются цветовые данные при проведении съёмки из множества положений 3D-сканера относительно сканируемого объекта. Предлагаемый способ дополнительно включает в себя генерирование пиксельной карты поверхности объекта с использованием данных о цвете объекта. При этом пиксельная карта объекта включает для каждого соответствующего пикселя из множества пикселей: значение цвета соответствующей точки на поверхности объекта; значение нецветового свойства, например текстуры, для точки на поверхности сканируемого объекта. Технический результат заявленного изобретения заключается в создании физически точной текстурной модели объекта, в которой текстура объекта может быть точно показана при различных углах сканирования и условиях освещения объекта. 6 н. и 24 з.п. ф-лы, 14 ил.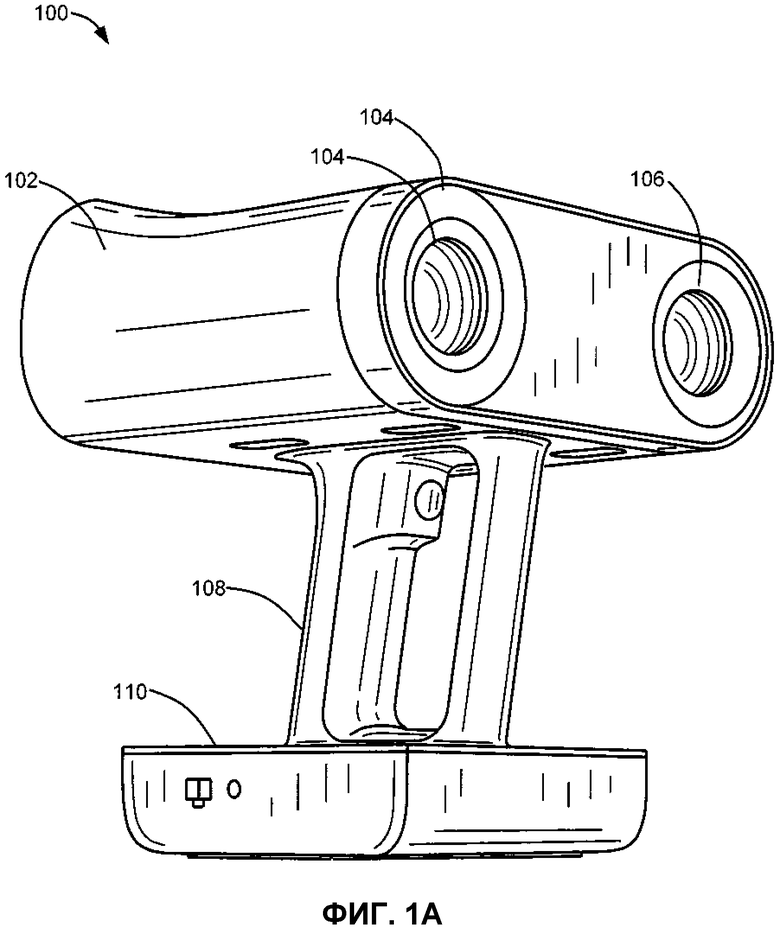
1. Способ формирования моделей текстуры с помощью портативного сканера, включающий:
сканирование объекта, имеющего поверхность, посредством трехмерного (3D) сканера с одним или более оптическими датчиками, причем при сканировании формируются:
- данные цвета из множества пространственных положений 3D сканера относительно объекта; и
- данные, соответствующие трехмерной (3D) форме по меньшей мере части поверхности объекта,
формирование 3D реконструкции формы упомянутой по меньшей мере части поверхности объекта с помощью данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта, причем 3D реконструкция содержит множество пикселей, и
для каждого пикселя, упомянутого множества пикселей, определение направления истинной нормали,
формирование пиксельной карты поверхности объекта с помощью, по меньшей мере, данных цвета, причем пиксельная карта для каждого соответствующего пикселя из множества пикселей содержит:
- значение цвета соответствующей точки на поверхности объекта, причем для каждого соответствующего пикселя из упомянутого множества пикселей пиксельной карты значение цвета определяют с помощью данных цвета из заданного диапазона углов относительно направления истинной нормали для соответствующего пикселя, и при этом упомянутый заданный диапазон углов представляет собой диапазон углов больше диффузного порогового угла; и
- значение отражательной способности соответствующей точки на поверхности объекта, причем значение отражательной способности соответствующей точки на поверхности объекта определяют с помощью направления истинной нормали для соответствующей точки на поверхности объекта, и при этом значение отражательной способности определяют с помощью данных цвета, полученных при углах относительно направления истинной нормали, которые меньше диффузного порогового угла.
2. Способ по п.1, в котором пиксельная карта представляет собой карту текстуры поверхности объекта.
3. Способ по п.1, дополнительно включающий формирование, для каждого соответствующего пикселя из упомянутого множества пикселей, значения нецветового свойства соответствующего пикселя с помощью, по меньшей мере, данных цвета, при этом нецветовое свойство выбирают из группы, состоящей из следующего: параметр металличности и шероховатость поверхности.
4. Способ по п.1, в котором сканирование включает в себя изменение положения 3D сканера на множество пространственных положений относительно объекта.
5. Способ по п.1, в котором отдельный оптический датчик получает данные цвета из множества пространственных положений 3D сканера относительно объекта.
6. Способ по п.1, дополнительно включающий:
формирование текстурированного 3D представления объекта посредством 3D реконструкции формы упомянутой по меньшей мере части поверхности объекта и пиксельной карты.
7. Способ по п.6, дополнительно включающий:
применение текстурированного 3D представления объекта для того, чтобы анимировать соответствующий объект в анимацию.
8. Способ по п.1, дополнительно включающий:
определение множества пространственных положений 3D сканера относительно объекта, из которых были получены данные цвета, посредством 3D реконструкции формы упомянутой по меньшей мере части поверхности объекта.
9. Способ по п.1, в котором:
упомянутые один или более оптических датчиков включают в себя первый оптический датчик; и
формирование данных, соответствующих трехмерной (3D) форме упомянутой по меньшей мере части поверхности объекта, включает в себя многократное выполнение следующих операций:
проецирование пространственной структуры освещения на поверхность объекта; и,
когда пространственную структуру освещения проецируют на поверхность объекта, получение изображения поверхности объекта посредством первого оптического датчика.
10. Способ по п.1, в котором:
упомянутые один или более оптических датчиков включают в себя второй оптический датчик; и
формирование данных цвета из множества пространственных положений 3D сканера относительно объекта включает в себя получение изображения поверхности объекта посредством второго оптического датчика, с помощью 3D сканера, расположенного в каждом из множества пространственных положений относительно объекта.
11. Способ по п.1, дополнительно включающий:
определение соответствия пиксель-уровень между пикселями в различных изображениях поверхности объекта.
12. Способ по п.1, в котором:
для каждого соответствующего пикселя из упомянутого множества пикселей пиксельной карты значение цвета соответствующей точки на поверхности объекта представляет собой скорректированное значение цвета; и
формирование скорректированного значения цвета включает в себя:
- определение номинального значения цвета для соответствующего пикселя с помощью данных цвета; и
- настройку номинального значения цвета для соответствующего пикселя пиксельной карты с помощью значения для отражательной способности соответствующей точки на поверхности объекта.
13. Способ по п.1, в котором, для каждого соответствующего пикселя из упомянутого множества пикселей пиксельной карты, направление истинной нормали определяют путем выбора, в качестве направления истинной нормали, угла, при котором в данных цвета наблюдается максимальная яркость.
14. Способ по п.1, в котором, для каждого соответствующего пикселя из упомянутого множества пикселей пиксельной карты, направление истинной нормали определяют путем:
сопоставления данных цвета с заданной функцией угла, при котором были получены данные цвета; и
выбора, в качестве направления истинной нормали, угла, при котором сопоставленная заданная функция имеет максимальную яркость.
15. Способ по п.1, в котором значение цвета для каждого из упомянутого множества пикселей представляет собой векторное значение.
16. Способ по п.1, в котором значение отражательной способности для каждого из упомянутого множества пикселей представляет собой скалярное значение.
17. Способ по п.1, в котором 3D сканер представляет собой портативный ручной 3D сканер.
18. Электронная система для формирования моделей текстуры с помощью портативного сканера, содержащая:
3D сканер, который содержит один или более оптических датчиков;
один или более процессоров; и
запоминающее устройство, в котором хранятся команды, которые, при их исполнении упомянутыми одним или более процессорами, инициируют выполнение упомянутыми одним или более процессорами способа по любому из пп.1-17.
19. Постоянный машиночитаемый носитель данных для хранения команд, инициирующих способ по пп.1-17, на котором хранятся команды, которые, при их выполнении электронной системой с одним или более процессорами, запоминающим устройством и 3D сканером, который содержит один или более оптических датчиков, инициируют выполнение упомянутыми одним или более процессорами способа по любому из пп.1-17.
20. Способ формирования моделей текстуры с помощью портативного сканера, включающий:
сканирование объекта, имеющего поверхность, посредством трехмерного (3D) сканера с одной или более камерами, причем при сканировании формируются:
- данные цвета из множества пространственных положений 3D сканера относительно объекта, причем формирование данных цвета из упомянутого множества пространственных положений 3D сканера относительно объекта включает получение изображения поверхности объекта с помощью упомянутых одной или более камер, расположенных в каждом из упомянутого множества пространственных положений относительно объекта; и
- данные, соответствующие трехмерной (3D) форме по меньшей мере части поверхности объекта, причем формирование данных, соответствующих трехмерной (3D) форме по меньшей мере части поверхности объекта, включает в себя многократное выполнение следующих операций:
- проецирование пространственной структуры освещения на поверхность объекта; и,
- когда пространственную структуру освещения проецируют на поверхность объекта, получение изображения поверхности объекта посредством упомянутых одной или более камер;
формирование 3D реконструкции формы упомянутой по меньшей мере части объекта с помощью упомянутых данных, соответствующих трехмерной (3D) форме упомянутой по меньшей мере части поверхности объекта, и
формирование пиксельной карты поверхности объекта, причем пиксельная карта для каждого соответствующего пикселя из упомянутого множества пикселей содержит:
- значение нецветового свойства соответствующей точки на поверхности объекта, и
- значение цвета соответствующей точки на поверхности объекта, причем значение цвета формируют с помощью данных цвета и корректируют согласно значению нецветового свойства соответствующей точки на поверхности объекта;
при этом:
для каждого пикселя из упомянутого множества пикселей пиксельной карты значение нецветового свойства соответствующей точки на поверхности объекта определяют посредством:
- предоставления, решающему устройству для системы одного или более уравнений текстуры, изображений поверхности объекта вместе с информацией, указывающей пространственные положения 3D сканера относительно объекта, на котором были получены изображения; и
- приема значения нецветового свойства соответствующей точки на поверхности объекта в качестве выходных данных от решающего устройства для системы одного или более уравнений текстуры.
21. Способ по п.20, в котором пиксельная карта представляет собой карту текстуры поверхности объекта.
22. Способ по п.20, в котором нецветовое свойство выбирают из группы, состоящей из следующего: диффузное значение, значение зеркальности, параметр металличности и шероховатость поверхности.
23. Способ по п.20, в котором сканирование включает в себя изменение положения 3D сканера на множество пространственных положений относительно объекта.
24. Способ по п.20, в котором отдельный оптический датчик получает данные цвета из множества пространственных положений 3D сканера относительно объекта.
25. Способ по п.20, дополнительно включающий:
формирование текстурированного 3D представления объекта посредством 3D реконструкции формы упомянутой по меньшей мере части поверхности объекта и пиксельной карты.
26. Способ по п.25, дополнительно включающий:
применение текстурированного 3D представления объекта для того, чтобы анимировать соответствующий объект в анимацию.
27. Способ по п.20, дополнительно включающий:
определение множества пространственных положений 3D сканера относительно объекта, из которых были получены данные цвета, посредством 3D реконструкции формы упомянутой по меньшей мере части поверхности объекта.
28. Способ по п.20, дополнительно включающий:
определение соответствия пиксель-уровень между пикселями в различных изображениях поверхности объекта.
29. Электронная система для формирования моделей текстуры с помощью портативного сканера, содержащая:
3D сканер, который содержит один или более оптических датчиков;
один или более процессоров; и
запоминающее устройство, в котором хранятся команды, которые, при их исполнении упомянутыми одним или более процессорами, инициируют выполнение упомянутыми одним или более процессорами способа по любому из пп.20-28.
30. Постоянный машиночитаемый носитель данных для хранения команд, инициирующих способ по пп.21-28, на котором хранятся команды, которые, при их выполнении электронной системой с одним или более процессорами, запоминающим устройством и 3D сканером, который содержит один или более оптических датчиков, инициируют выполнение упомянутыми одним или более процессорами способа по любому из пп.20-28.
| US 2018047208 A1, 15.02.2018 | |||
| СПОСОБ СОЗДАНИЯ ИЗОБРАЖЕНИЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ ДЛЯ СИСТЕМ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2467395C1 |
| WO 2014191055 A1, 04.12.2014 | |||
| US 20090278845 A1, 12.11.2009 | |||
| US 0010003786 B2, 19.06.2018 | |||
| US 20180182163 A1, 28.06.2018. | |||

