ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе чистки зубов на основе текучей среды и к способу чистки зубов пользователя с помощью системы для чистки зубов на основе текучей среды, а также к элементу компьютерной программы и компьютерочитаемому носителю.
УРОВЕНЬ ТЕХНИКИ
GB 2538301 раскрывает прибор для чистки зубов, содержащий ручку; систему подачи текучей среды для подачи порции рабочей текучей среды к зубам пользователя, по меньшей мере часть (например, сопло, или насадка) системы подачи текучей среды выполнена с возможностью перемещения относительно ручки, когда прибор перемещается вдоль зубов пользователя; датчик для обеспечения выходного сигнала, который изменяется при перемещении по меньшей мере указанной части системы подачи текучей среды относительно ручки; и схему управления для запуска подачи рабочей текучей среды к зубам пользователя в зависимости от выходного сигнала от датчика.
При использовании гибридных продуктов для чистки струей воды/щеткой пользователи могут почувствовать попадание в рот слишком большого количества воды при одновременной чистке зубов щеткой и струей по типу зубной нити, если межзубная струя работает непрерывно, см., например, US 9987109 и US 9814302. Кроме того, требуются большие резервуары для текучей среды, что делает устройства громоздкими и неавтономными, а важное действие фторида зубной пасты значительно снижается из-за больших количеств текучей среды. Кроме того, когда щетку перемещают слишком быстро, чистящее действие струи по типу зубной нити не работает должным образом из-за выполнения струйной обработки на зубах, а не между зубами.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Было бы полезно иметь усовершенствованное средство для чистки зубов с помощью устройства для чистки струей по типу зубной нити и/или гибридной струи по типу зубной нити/зубной щетки.
Задача настоящего изобретения решена с помощью объекта независимых пунктов формулы изобретения, в которых дополнительные варианты осуществления включены в зависимые пункты формулы изобретения. Следует отметить, что нижеследующие описанные аспекты и примеры изобретения применимы также к системе чистки зубов на основе текучей среды и к способу чистки зубов пользователя с помощью системы для чистки зубов на основе текучей среды, а также к элементу компьютерной программы и компьютерочитаемому носителю.
В первом аспекте предложена система чистки зубов на основе текучей среды, содержащая удерживаемый корпус, блок подачи текучей среды, по меньшей мере один датчик и блок управления. Удерживаемый корпус выполнен с возможностью соединения с головкой. Блок подачи текучей среды выполнен с возможностью соединения с соплом, выполненным с возможностью выпуска текучей среды. Сопло содержится внутри головки. По меньшей мере один датчик предоставляет блоку управления, информацию, относящуюся к положению головки относительно зубов пользователя. Блок управления использует информацию для обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла на зубы пользователя.
Согласно изобретению по меньшей мере один датчик содержит датчик перемещения, выполненный с возможностью определения информации о скорости, относящейся к скорости головки относительно зубов пользователя. Таким образом, информация о скорости может быть использована для регулирования потока жидкости к зубам.
Информация о скорости также может быть использована для определения положения, например, когда было обнаружено базовое положение, например, межзубный промежуток. Перемещение в сторону от этого базового положения со скоростью затем может быть преобразовано в расстояние, и таким образом можно определить, когда головка переместилась от межзубного промежутка, и когда головка, например, вернулась к этому межзубному промежутку. Кроме того, зная средний размер зуба, если, например, было обнаружено межзубное расстояние, то боковое перемещение с обнаруженной скоростью может быть преобразовано в расстояние, равное ожидаемому межзубному промежутку между соседними зубами. Затем сопло может выпустить струю текучей среды в этом новом местоположении и/или запустить процесс обнаружения межзубного промежутка в том местоположении, где предположительно расположен такой межзубной промежуток. Таким образом, сопло может выпускать чистящую струю в следующий межзубной промежуток. Таким образом, выполнение струйной обработки запускается основе прогноза или ожидания, в котором учтена временная задержка в системах, которые в противном случае не запустили бы струйную обработку в конкретных местоположениях, например межзубных промежутках.
Другими словами, устройство для чистки полости рта обнаруживает положение головки, например, зубной щетки или устройства для чистки струей по типу зубной нити, относительно зубов пользователя и использует эту информацию для регулирования струи текучей среды на зубы пользователя. Таким образом, струя текучей среды регулируется в зависимости от выходного сигнала от датчика, так что требуется меньше очищающей текучей среды, такой как вода. Это означает, что во рту пользователя накапливается меньше текучей среды, что приводит к более удобному чистящему решению, а резервуар для текучей среды может быть намного меньше, чем требовалось ранее, и даже может быть расположен внутри ручки устройства для чистки полости рта.
В одном примере блок управления выполнен с возможностью управления блоком подачи текучей среды для регулирования потока текучей среды из сопла на основе выходного сигнала одного или более датчиков по меньшей мере от одного датчика.
В одном примере блок управления выполнен с возможностью обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла, когда головка размещена в таком положении, что текучая среда направлена для попадания в межзубной промежуток зубов пользователя.
Другими словами, сопло выпускает струю чистящей текучей среды только в то время, когда она направлена в нужном направлении.
В одном примере блок управления выполнен с возможностью управления блоком пользовательского интерфейса для вывода пользователю информации, касающейся перемещения головки.
Другими словами, система обеспечивает изменение поведения пользователя, так как пользователю предоставляется обратная связь, обеспечивающая пользователю возможность эффективно размещать удерживаемый корпус, например, зубную щетку, относительно зубов, чтобы чистящая струя была направлена в нужном направлении, то есть в направлении межзубного промежутка и, при необходимости, также в направлении линии десен. Таким образом, например, пользователю может быть предоставлена обратная связь, которая позволяет пользователю перемещать удерживаемый корпус таким образом, чтобы чистящая струя была направлена должным образом.
В одном примере блок управления выполнен с возможностью использования информации, относящейся к положению головки относительно зубов пользователя, для остановки выпуска блоком подачи текучей среды текучей среды из сопла, когда головка размещена в таком положении, что текучая среда была бы направлена для попадания на поверхность зубов пользователя. Таким образом, чистящая струя не выпускается на местоположения, например, на стороны прикуса, куда она не должна быть направлена. Тогда обеспечивается возможность точного выпуска струи и только в промежутки между двумя зубами (межзубные/межпроксимальные) и/или вблизи линии десен в направлении поддесневых карманов.
Согласно изобретению по меньшей мере один датчик содержит датчик положения (т.е. ориентации и местоположения), выполненный с возможностью определения информации о положении, относящейся к положению головки относительно зубов пользователя.
В одном примере информация о положении содержит информацию, относящуюся к размещению головки в таком положении, что сопло находится вблизи межзубного промежутка зубов пользователя. Таким образом, удерживаемый корпус, например зубная щетка, обнаруживает, когда ее струйное сопло направлено в требуемом направлении, позволяя чистящей струе эффективно очищать межзубной промежуток и, при необходимости, также линию десен.
В одном примере информация о положении содержит информацию, относящуюся к размещению головки в таком положении, что сопло находится вблизи линии десен зубов пользователя.
В одном примере блок управления выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка, и использования информации о скорости для определения того, когда головка, переместившаяся из этого положения, возвращается в это положение. Блок управления выполнен с возможностью активации блока подачи текучей среды для выпуска текучей среды из сопла, когда головка возвращается в положение первого межзубного промежутка. Таким образом, межзубной промежуток может быть обнаружен, но может происходить задержка по времени, прежде чем блок подачи текучей среды сможет активировать выпуск струи чистящей текучей среды для чистки зубов из своего сопла, и головка могла бы переместиться вбок до того, как чистящая струя может быть выпущена. Таким образом, путем обнаружения межзубного промежутка, это местоположение может быть зарегистрировано, и затем, когда головка перемещается, информация о скорости преобразуется в информацию о положении относительно обнаруженного межзубного промежутка. Таким образом, когда головка начинает приближаться к обнаруженному межзубному промежутку, блок подачи текучей среды может быть уже заполнен или заполняться, и немедленно направлять чистящую струю в нужном направлении.
В одном примере блок управления выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка и использования информации о скорости для определения того, когда головка переместилась в местоположение второго межзубного промежутка, смежного с первым межзубным промежутком. Блок управления выполнен с возможностью активации блока подачи текучей среды для выпуска текучей среды из сопла, когда головка расположена на втором межзубном промежутке. Таким образом, межзубной промежуток может быть обнаружен, но может происходить задержка по времени, прежде чем блок подачи текучей среды сможет активировать выпуск струи чистящей текучей среды для чистки зубов из своего сопла, и головка, например, зубной щетки, могла бы переместиться вбок до того, как чистящая струя может быть выпущена. Таким образом, путем обнаружения межзубного промежутка, это местоположение может быть зарегистрировано, и затем, когда головка перемещается, информация о скорости преобразуется в информацию о положении относительно обнаруженного межзубного промежутка. При этом знание размера зубов может быть использовано для оценки того, когда головка приближается к соседнему межзубному промежутку, и блок подачи текучей среды может быть заполнен или заполняться при подготовке к выпуску чистящей струи в следующий межзубной промежуток, например, когда он обнаружен.
В одном примере блок управления выполнен с возможностью использования информации о скорости, чтобы останавливать выпуск текучей среды из блока подачи текучей среды из сопла, когда скорость головки больше первого порогового уровня и/или меньше второго порогового уровня. Таким образом, когда головка, например, зубной щетки перемещается слишком быстро, чтобы эффективно чистить межзубный промежуток, обработка струей по типу зубной нити не выполняется, и точно так же обработка струей по типу зубной нити не выполняется, если головка перемещается слишком медленно, поскольку это могло бы привести к выпуску слишком большого количества текучей среды.
В одном примере информация, выводимая блоком пользовательского интерфейса, включает вывод информации о том, что скорость головки больше первого порогового уровня и/или меньше второго порогового уровня. Таким образом, посредством соответствующей обратной связи пользователи могут узнавать, что они перемещают удерживаемый корпус (например, зубную щетку) и, таким образом, головку с соплом, слишком быстро для эффективной чистки струей по типу зубной нити, а также, что они перемещают удерживаемый корпус слишком медленно. Таким образом это обеспечивает более корректное использование пользователем системы чистки зубов на основе текучей среды.
В одном примере блок управления выполнен с возможностью обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла с одним или более настроенными параметрами: скоростью струи текучей среды, частотой струи текучей среды, продолжительностью струи текучей среды, давлением текучей среды, скоростью потока текучей среды.
В одном варианте осуществления удерживаемый корпус содержит блок подачи текучей среды, по меньшей мере один датчик и блок управления. Блок управления использует информацию для обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла, когда сопло находится в одном положении из одного или более конкретных положений относительно зубов пользователя.
В другом аспекте, обеспечен способ чистки зубов пользователя с использованием системы чистки зубов на основе текучей среды. Система чистки зубов на основе текучей среды содержит: удерживаемый корпус, выполненный с возможностью соединения с головкой; блок подачи текучей среды, выполненный с возможностью соединения с соплом внутри головки, причем сопло выполнено с возможностью выпуска текучей среды; по меньшей мере один датчик; и блок управления. Способ включает:
- обеспечение предоставления блоку управления с помощью по меньшей мере одного датчика информации, относящейся к положению головки относительно зубов пользователя, включая информацию о скорости, относящуюся к скорости головки относительно зубов пользователя; и
- использование блоком управления информации для обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла на зубы пользователя.
Согласно еще одному аспекту, предоставлен элемент компьютерной программы, управляющий системой, как описано ранее, которая, если элемент компьютерной программы выполняется блоком обработки, адаптирована для выполнения этапов способа, описанного ранее.
Согласно другому аспекту предложен компьютерочитаемый носитель, на котором хранится элемент компьютерной программы, как описано ранее. Элемент компьютерной программы может, например, быть программой, но также может быть программируемой логической интегральной схемой (FPGA), программируемым логическим устройством (PLD) или любым другим подходящим цифровым средством.
Предпочтительно примеры любого из вышеуказанных аспектов и преимущества, обеспечиваемые любым из них, в равной степени применимы ко всем другим аспектам и наоборот.
Вышеупомянутые аспекты и примеры станут очевидными из вариантов осуществления, описанных ниже, и будут разъяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Приведенные для примера варианты осуществления будут описаны ниже со ссылкой на следующие чертежи:
на фиг. 1 показана схематическая модель системы чистки зубов на основе струи по типу зубной нити, взятой в качестве примера;
на фиг. 2 показан способ чистки зубов пользователя с помощью системы чистки зубов на основе струи по типу зубной нити;
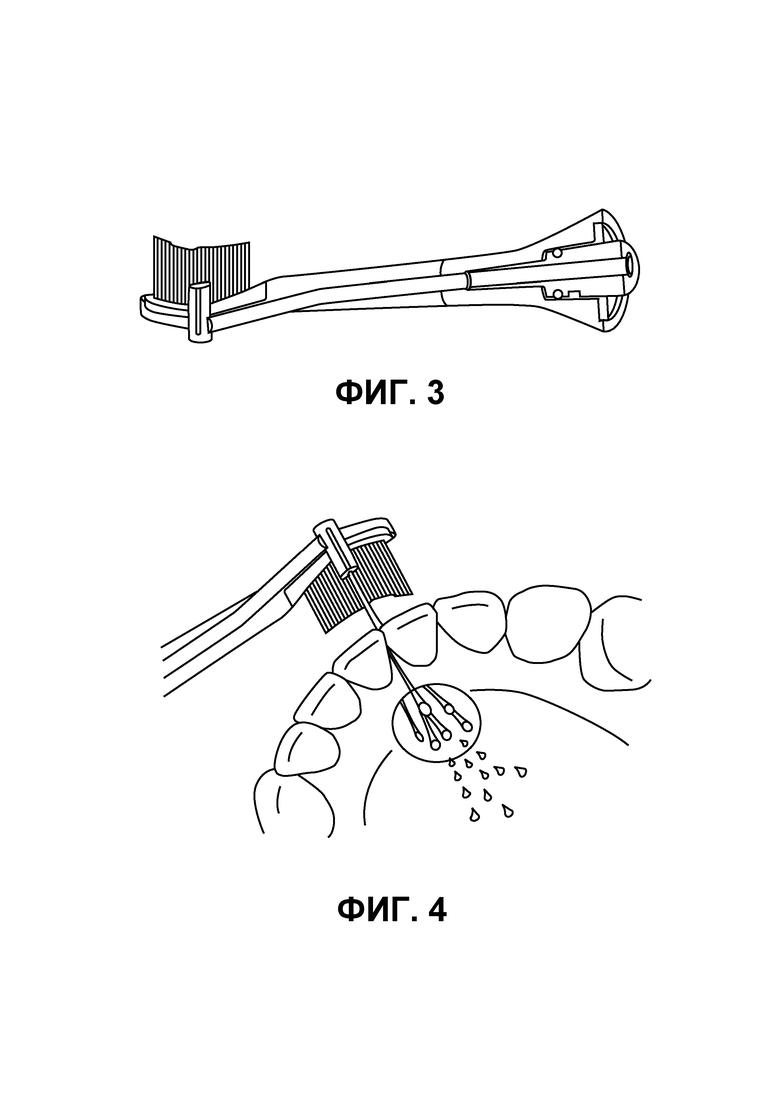
на фиг. 3 показан вариант осуществления гибридной струи по типу зубной нити и зубной щетки;
на фиг. 4 показан вариант осуществления гибридной струи по типу зубной нити и зубной щетки в работе;
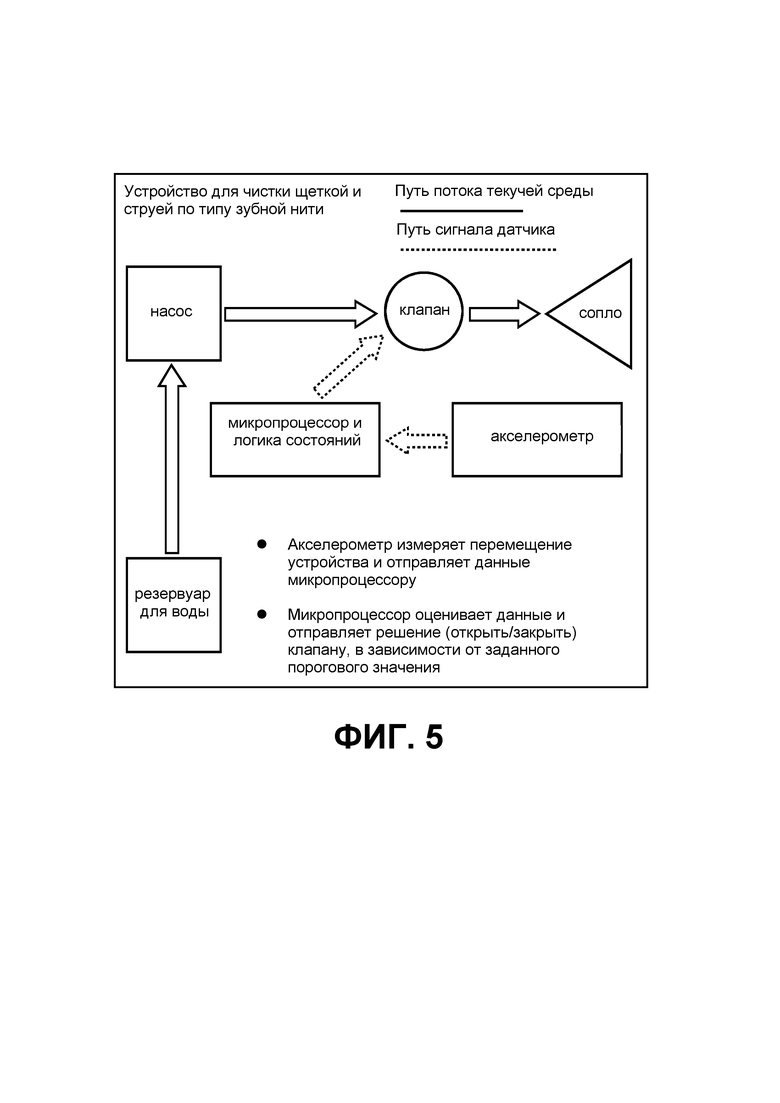
на фиг. 5 показан подробный пример взаимодействия рабочих частей типичной гибридной системы струи по типу зубной нити и зубной щетки;
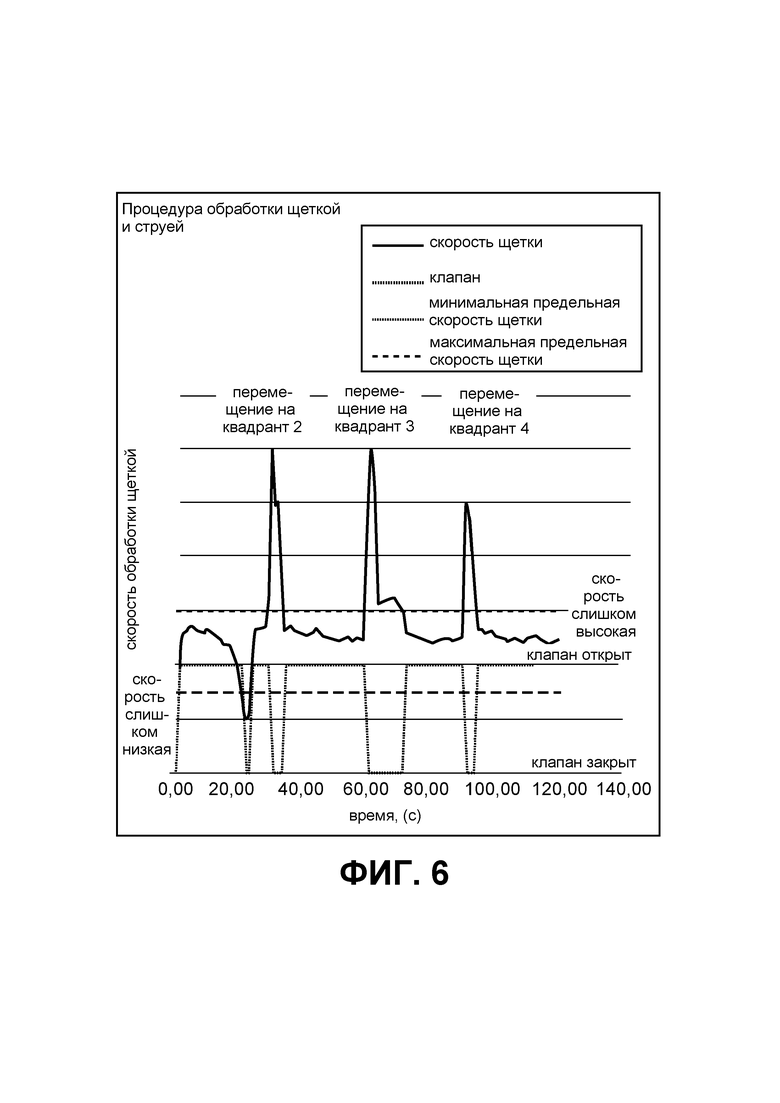
на фиг. 6 показана приведенная для примера процедура чистки струей по типу зубной нити и щеткой для типовой системы по фиг. 5;
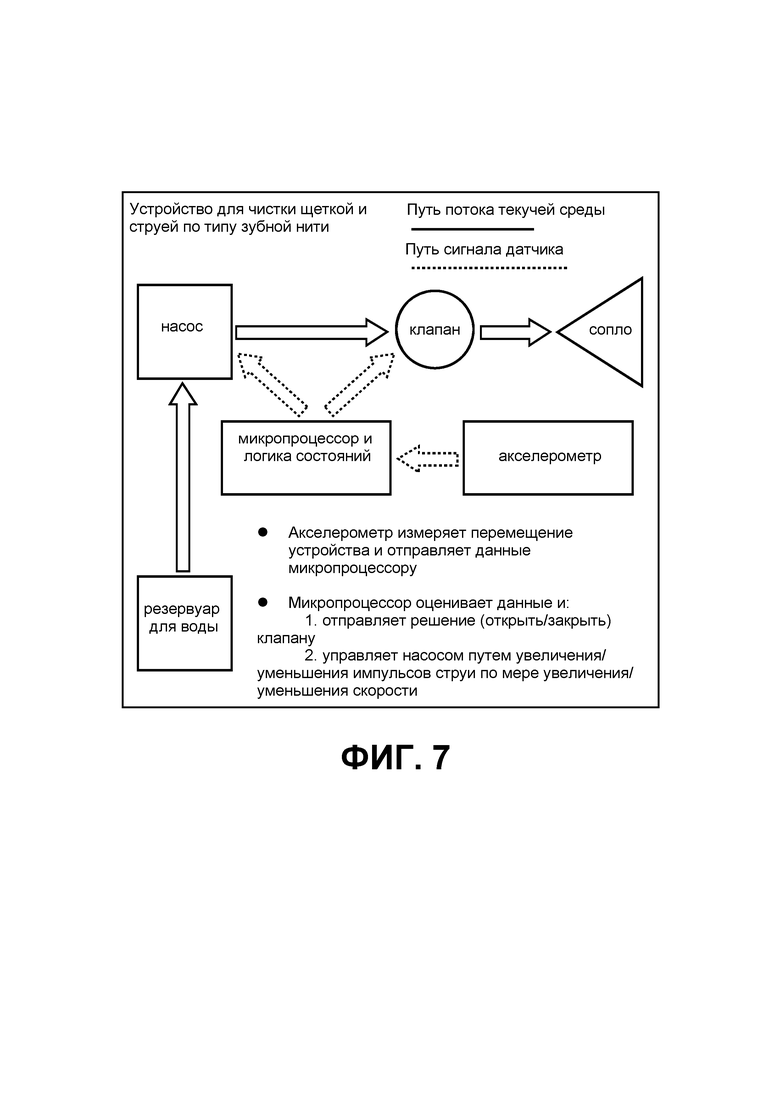
на фиг. 7 показан подробный пример взаимодействия рабочих частей типичной гибридной системы струи по типу зубной нити и зубной щетки;
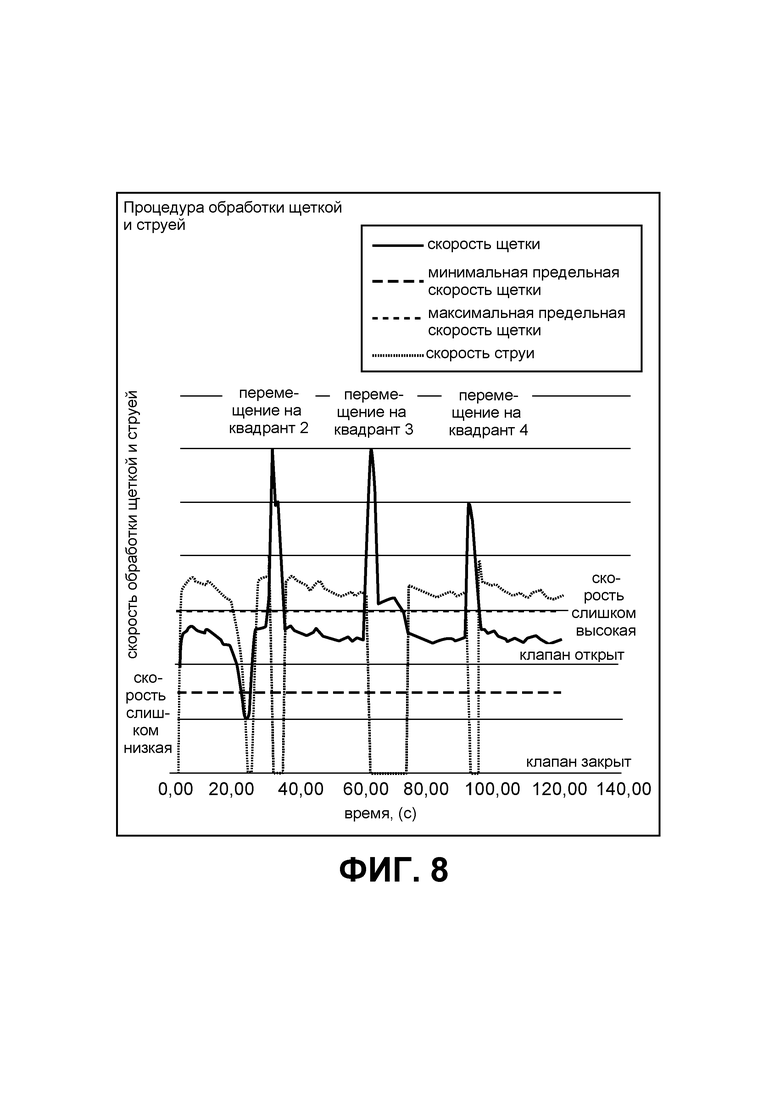
На фиг. 8 показана приведенная для примера процедура чистки струей по типу зубной нити и щеткой для типовой системы по фиг. 7;
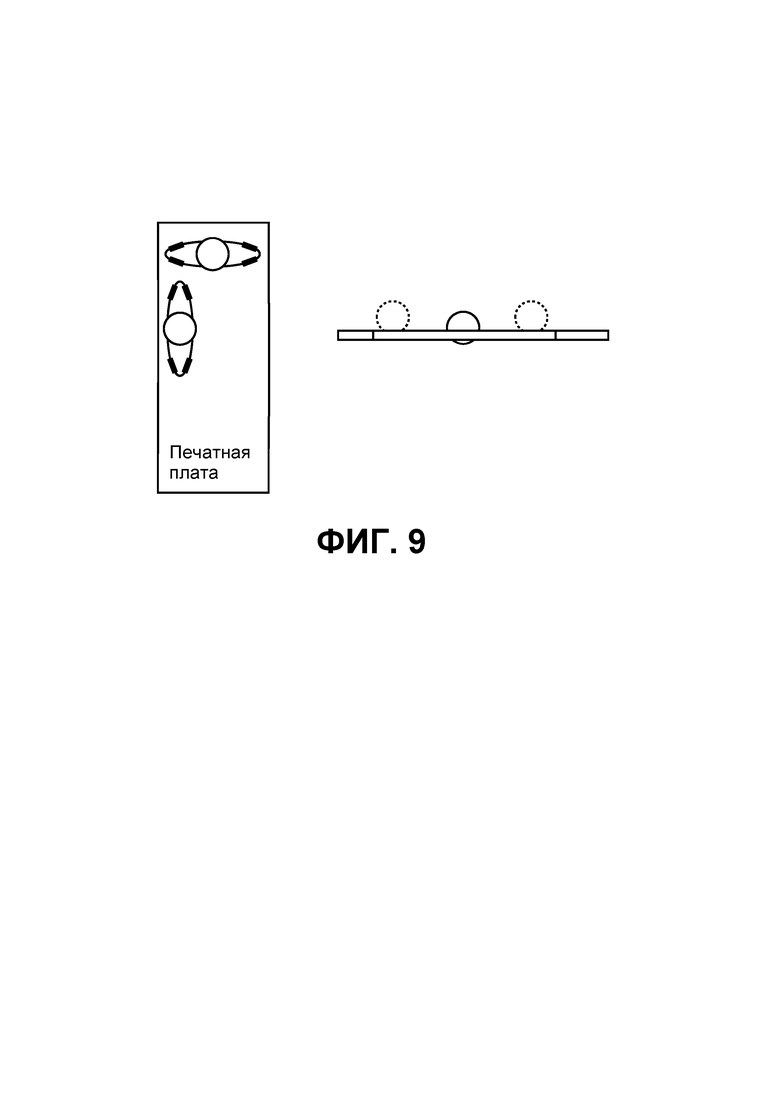
на фиг. 9 показан приведенный для примера датчик перемещения;
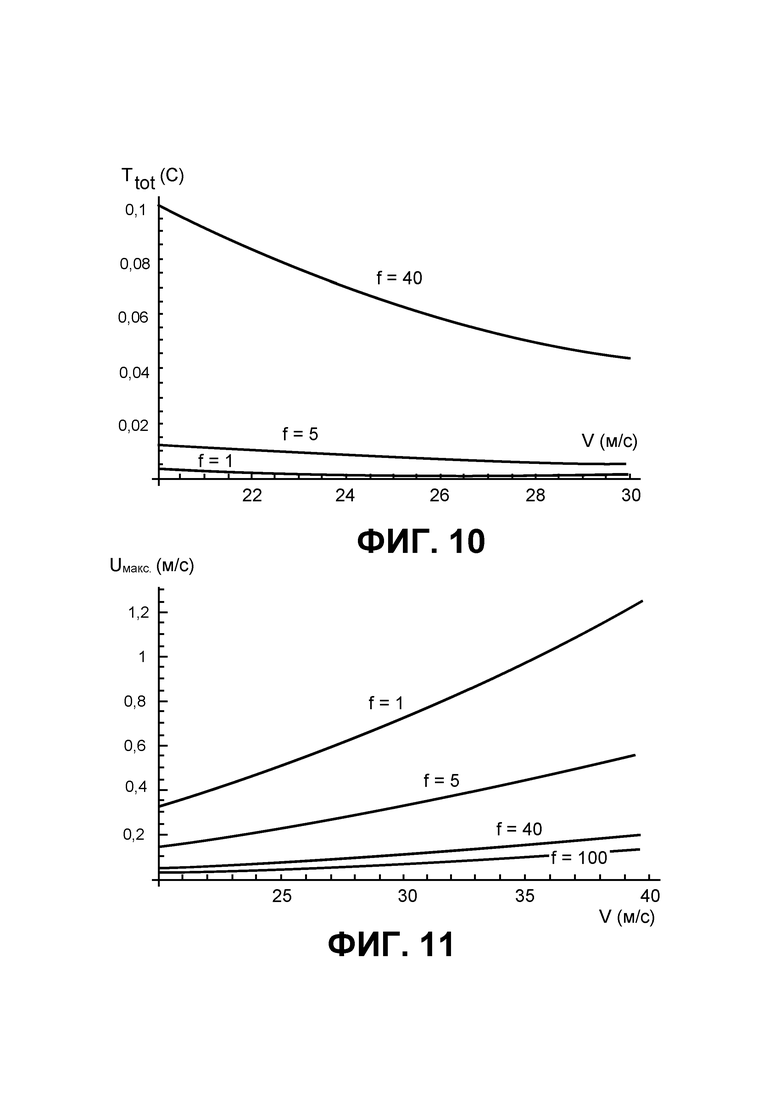
На фиг. 10 показано приведенное для примера время чистки как функция скорости текучей среды; и
на фиг. 11 показана приведенная для примера максимальная скорость перемещения головки зубной щетки, как функция скорости текучей среды.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
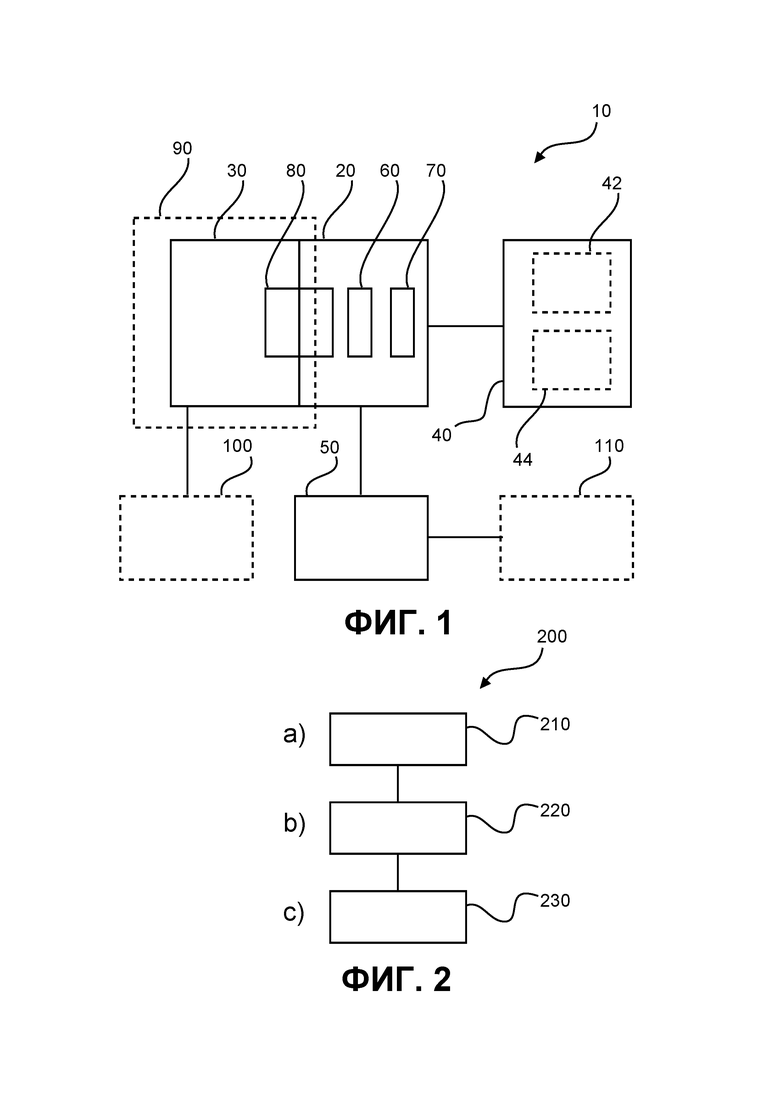
На фиг. 1 показан пример системы 10 чистки зубов на основе текучей среды. Система содержит удерживаемый корпус 20, блок 30 подачи текучей среды, по меньшей мере один датчик 40 и блок 50 управления. Удерживаемый корпус 20 выполнен с возможностью соединения с головкой 60. Головка 60 может некоторых случаях иметь щетинки 70 или в некоторых случаях резиновые подушечки, пену, полировальный лист или другие подходящие чистящие элементы, которые, в дополнение к чистке текучей средой по типу зубной нити, обеспечивают чистку зубов. Таким образом, система 10 в некоторых случаях может быть гибридной системой чистки на основе текучей среды и зубной щетки. Блок подачи 30 текучей среды выполнен с возможностью соединения с соплом 80, выполненным с возможностью выпуска текучей среды, и сопло 80 содержится внутри головки 60. По меньшей мере один датчик 40 предоставляет блоку управления информацию, относящуюся к положению головки удерживаемого корпуса 20 относительно зубов пользователя. Блок 50 управления использует информацию для обеспечения блоку подачи текучей среды возможности выпуска текучей среды из сопла на зубы пользователя. Согласно изобретению по меньшей мере один датчик содержит датчик 44 перемещения, выполненный с возможностью определения информации о скорости, относящейся к скорости головки 60 относительно зубов пользователя. В одном примере датчик 44 перемещения содержит инерционный измерительный блок.
В одном примере удерживаемый корпус 20 представляет собой корпус зубной щетки.
В одном примере блок подачи 30 текучей среды содержится внутри удерживаемого корпуса 20. В одном примере блок 30 подачи текучей среды содержится внутри ручки 90 удерживаемого корпуса 20.
В одном примере блок 50 управления содержится внутри удерживаемого корпуса 20. В одном примере блок 50 управления содержится внутри ручки 90 удерживаемого корпуса 20.
В одном примере система 10 чистки зубов на основе текучей среды содержит резервуар 100, выполненный с возможностью удержания текучей среды, при этом резервуар 100 сообщается по текучей среде с блоком 30 подачи текучей среды. В одном примере резервуар 100 содержится внутри удерживаемого корпуса 20. В одном примере резервуар 100 содержится внутри ручки 90 удерживаемого корпуса 20.
В одном примере текучая среда представляет собой жидкость. В одном примере текучая среда представляет собой газ. В одном примере текучая среда представляет собой смесь жидкости/газа. В одном примере текучая среда, выпускаемая из сопла 80, содержит струю текучей среды. В другом примере текучая среда, выпускаемая из сопла 80, содержит распыляемую струю текучей среды.
Согласно одному примеру блок 50 управления выполнен с возможностью обеспечения блоку 30 подачи текучей среды возможности регулирования потока текучей среды из сопла 80 на основе выходного сигнала одного или более датчиков из указанного по меньшей мере одного датчика.
Согласно одному примеру блок 50 управления выполнен с возможностью обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80, когда головка 60 размещена в таком положении, что текучая среда направлена для попадания в межзубной промежуток зубов пользователя.
В одном примере блок 50 управления выполнен с возможностью обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80, когда головка 60 размещена в таком положении, что текучая среда направлена для попадания на линию десен зубов пользователя.
Согласно одному примеру система содержит блок 110 пользовательского интерфейса. Блок 50 управления выполнен с возможностью управления блоком 110 пользовательского интерфейса для вывода пользователю информации, относящейся к перемещению головки 60.
В одном примере блок 110 пользовательского интерфейса содержится внутри удерживаемого корпуса 20.
В одном примере блок 110 пользовательского интерфейса содержится внутри удаленного устройства 120. В одном примере удаленное устройство 120 является одним из следующего: мобильным телефоном, планшетом, компьютером, удаленным сервером.
В одном примере информация, выводимая пользователю, содержит звуковой сигнал. В одном примере звуковой сигнал выдается удерживаемым корпусом 20. В одном примере звуковой сигнал выдается удаленным устройством 120.
В одном примере информация, выводимая для пользователя, содержит тактильный сигнал. В одном примере тактильный сигнал относится к вибрации удерживаемого корпуса 20. В одном примере тактильный сигнал относится к вибрации удаленного устройства 120.
В одном примере информация, выводимая для пользователя, содержит визуальный сигнал. В одном примере визуальный сигнал относится к цветному свету, излучаемому по меньшей мере одной частью удерживаемого корпуса 20. В одном примере визуальный сигнал относится к цветному свету, выдаваемому экраном 130 удаленного устройства 120.
Согласно одному примеру блок 50 управления выполнен с возможностью использования информации, относящейся к положению головки 60 относительно зубов пользователя для остановки выпуска текучей среды из сопла 80 блоком 30 подачи текучей среды, когда головка 60 размещена в таком положении, что текучая среда была бы направлена для попадания на поверхность зубов пользователя.
Согласно одному примеру по меньшей мере один датчик 40 содержит датчик 42 положения, выполненный с возможностью определения информации о положении, относящейся к головке 60, относительно зубов пользователя.
Согласно одному примеру информация о положении содержит информацию, относящуюся к размещению головки 60 в таком положении, что сопло 80 находится вблизи межзубного промежутка зубов пользователя.
Согласно одному примеру информация о положении содержит информацию, относящуюся к размещению головки 60 в таком положении, что сопло 80 находится вблизи линии десен зубов пользователя.
В одном примере датчик 42 положения содержит a датчик давления текучей среды.
Согласно одному примеру блок 50 управления 50 выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка, и использования информации о скорости для определения того, когда головка 60, переместившаяся из этого положения, возвращается в это положение. Блок 50 управления выполнен с возможностью активации блока 30 подачи текучей среды для выпуска текучей среды из сопла 80, когда головка 60 вернулась в положение первого межзубного промежутка.
Согласно одному примеру блок 50 управления выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка, и использования информации о скорости для определения того, когда головка 60 переместилась в положение второго межзубного промежутка, смежного с первым межзубным промежутком. Блок 50 управления выполнен с возможностью активации блока 30 подачи текучей среды для выпуска текучей среды из сопла 80, когда головка 60 расположена на втором межзубном промежутке.
Согласно одному примеру блок 50 управления выполнен с возможностью использования информация о скорости для остановки выпуска текучей среды из сопла 80 блоком 30 подачи текучей среды, когда скорость головки 60 больше первого порогового уровня и/или меньше второго порогового уровня.
Согласно одному примеру вывод информации блоком 110 пользовательского интерфейса, включает вывод информации о том, что скорость головки 60 больше первого порогового уровня и/или меньше второго порогового уровня.
В одном примере информация содержит звуковой, тактильный и/или визуальный сигнал. В одном примере сигнал, относящийся к первому пороговому значению, отличается от сигнала, относящегося ко второму пороговому значению.
Согласно одному примеру блок 50 управления выполнен с возможностью обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80 с одним или более настроенными параметрами: скоростью струи текучей среды, частотой струи текучей среды, продолжительностью струи текучей среды.
В одном примере удерживаемый корпус 20 содержит блок 30 подачи текучей среды, по меньшей мере один датчик 40 и блок 50 управления. Блок 50 управления выполнен с возможностью использования информации обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80, когда сопло 80 находится в одном положении из одного или более конкретных положений относительно зубов пользователя.
На фиг. 2 показаны основные этапы способа 200 чистки зубов пользователя с помощью системы 10 чистки зубов на основе текучей среды. Способ 200 включает:
на этапе 210 обеспечения, обеспечение предоставления по меньшей мере одним датчиком 40, 44 информации, относящейся к головке 60 относительно зубов пользователя, включая информацию о скорости, относящуюся к скорости головки 60 относительно зубов пользователя;
на этапе 220 обеспечения, обеспечение предоставления информации по меньшей мере одним датчиком 40, 44 блоку управления и
на этапе 230 использования, использование блоком 50 управления информации для обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80 на зубы пользователя.
В одном примере этап 230 использования включает использование блоком 50 управления информации для обеспечения блоку 30 подачи текучей среды возможности выпуска текучей среды из сопла 80, когда головка 60 находится в таком положении, что текучая среда направлена для попадания на линию десен зубов пользователя.
В одном примере система 10 чистки зубов на основе текучей среды содержит блок 110 пользовательского интерфейса, и на этапе 230 использования блок 50 управления управляет блоком 110 пользовательского интерфейса для вывода пользователю информации, относящейся к перемещению головки 60.
В одном примере этап 230 использования включает использование блоком 50 управления информации для остановки выпуска текучей среды из сопла 80 блоком 30 подачи текучей среды, когда головка 60 размещена в таком положении, что текучая среда была бы направлена для попадания на поверхность зубов пользователя.
В одном примере этап 230 использования включает использование блоком 50 управления информации о положении для определения положения первого межзубного промежутка, и использование информации о скорости для определения того, когда головка 60, переместившаяся из этого положения, возвращается в это положение, и при этом блок 50 управления активирует блок 30 подачи текучей среды для выпуска текучей среды из сопла, когда головка 60 вернулась в положение первого межзубного промежутка.
В одном примере этап 230 использования включает использование блоком 50 управления информации о положении для определения положения первого межзубного промежутка, и использование информация о скорости для определения, когда головка 60 переместилась в положение второго межзубного промежутка, смежного с первым межзубным промежутком, и при этом блок 50 управления активирует блок 30 подачи текучей среды для выпуска текучей среды из сопла 80, когда головка 60 расположена на втором межзубном промежутке.
В одном примере этап 230 использования содержит блок 50 управления, использующий информацию о скорости для остановки выпуска текучей среды из сопла 80 блоком 30 подачи текучей среды, когда скорость головки 60 больше первого порогового уровня и/или меньше второго порогового уровня.
В одном примере этап 230 использования включает вывод информации блоком 110 пользовательского интерфейса, что скорость головки 60 больше первого порогового уровня и/или меньше второго порогового уровня. Как упомянуто выше, информация может содержать звуковой, тактильный и/или визуальный сигнал, и сигнал, относящийся к первому пороговому значению, может отличаться от сигнала, относящегося ко второму пороговому значению.
Система 10 чистки зубов на основе текучей среды и связанный с ней способ чистки зубов пользователя будут дополнительно описаны с конкретными деталями со ссылкой на фиг. 3-11, в отношении конкретных подробных вариантов осуществления. Здесь конкретные варианты осуществления относятся к гибридной системе чистки на основе текучей среды и механической чистки зубов, в которой струйное сопло находится внутри головки зубной щетки, например, со щетинками. Однако следует понимать, что действие струйной обработки не обязательно должно быть связано с зубной щеткой, имеющей щетинки, и может использоваться в качестве автономного устройства для чистки струей по типу зубной нити. Таким образом, описанные здесь варианты осуществления относятся к конкретному типу варианта осуществления.
На фиг. 3-4 показан пример гибридной системы чистки на основе текучей среды и механической системы чистки зубов, которую также можно назвать гибридной струей по типу зубной нити и зубной щеткой. Это относится к устройству для чистки полости рта с комбинированными функциями чистки зубов и межзубного промежутка, использующего текучую среду в виде жидкости (например, воды) или газа (например, воздуха) или их смеси. Действие струйной обработки текучей средой значительно улучшается, если она предназначена конкретно для межзубного промежутка. Например, системы датчиков, описанные в US 9987109 и/или US 9814302, могут использоваться для определения местоположения межзубного промежутка. Во время чистки зубов очищаются разные стороны поверхности зуба (например, щечная, язычная и прикусная). Сочетание чистки зубов и чистки струей по типу зубной нити в одном устройстве может улучшить чистку межзубных промежутков, поскольку достигается как щечная, так и лингвальная стороны межзубного промежутка. Датчики для определения местоположения (положения и ориентации) головки зубной щетки относительно зубов пользователя описаны, например, в WO 2017/002004 A1, WO 2017/001399 A1, WO 2017/002012 A1 и WO 2016/174621 A1.
В описанном здесь примере комбинированного устройства для чистки зубов щеткой и струей по типу зубной нити подача текучей среды происходит при обнаружении межзубного промежутка или линии десен с использованием сенсорных средств, как описано выше, и выход сопла обращен к межзубному промежутку или линии десен. Кроме того, когда пользователь перемещает щетку слишком быстро, например, во время чистки, контур обнаружения-запуска струи отключает струю, поскольку сопло уже переместилось в другое место и больше не обращено к межзубному промежутку или линии десен. Таким образом, в электрической зубной щетке, которая имеет комбинированную или гибридную функциональность чистки струей по типу зубной нити и щеткой, предусмотрена автоматическая система струйной обработки, которая автоматически выпускает струю, когда сопло направлено на межзубной промежуток и линию десен, с датчиком измерения движения в зубной щетке в виде акселерометра, который измеряет скорость устройства относительно зубной дуги. Как только устройство превышает пороговую скорость/ускорение чистки, действие струйной обработки текучей средой прерывается путем остановки закачивающего насоса или закрытия клапана, поскольку струйная обработка во время такого перемещения неэффективна. Кроме того, скорость потока жидкости снижается при уменьшении скорости зубной щетки. Когда скорость зубной щетки слишком мала, очистка эффективна, но за счет слишком большого количества жидкости, впрыскиваемой в рот, и поэтому снова, когда скорость головки зубной щетки падает ниже порогового значения, действие струйной обработки прерывается. Другими словами, расход жидкости можно регулировать в зависимости от скорости головки щетки.
На фиг. 5 показан подробный пример взаимодействия рабочих частей типичной гибридной системы чистки на основе текучей среды и механической чистки зубов (системы гибридной чистки струей по типу зубной нити и зубной щетки). В общем, система имеет контур управления, в котором перемещение щетки обнаруживается/измеряется и принимается в качестве входного параметра для выключения/включения режима впрыскивания (открытия/закрытия клапана). В этом варианте осуществления остановка непрерывной струи происходит, если превышен верхний порог скорости чистки или если скорость чистки опускается ниже порогового значения. Таким образом, непрерывная струя прекращается, когда обнаруживается, что перемещение щетки/скорость щетки выходит за пределы скорости чистки. На фиг. 5 стрелки от резервуара для воды к насосу, к клапану и к соплу соответствуют пути потока текучей среды, а стрелки от акселерометра к микропроцессору и от логики состояний к клапану соответствуют пути сигнала датчика. Следует отметить, что показанная конструкция представляет собой лишь один приведенный для примера вариант осуществления, и, например, насос может регулироваться непосредственно микропроцессором и регулировкой мощности без клапана, например, посредством импульсного режима работы.
Как показано на фиг. 5, гибридная система чистки струей по типу зубной нити/зубной щеткой содержит насос, резервуар для воды, функционал датчика перемещения (акселерометра), микропроцессор и клапаны. В устройство также встроена функция чистки струей по типу зубной нити (включая, помимо прочего, резервуар для воды, насос, трубки, сопло и клапаны), что помогает улучшить качество чистки. Для системы водяной струи предусмотрен контур обратной связи, который останавливает струю при определенной скорости чистки и возобновляет струю, когда скорость возвращается на более низкий уровень, и акселерометр, измеряющий скорость/движение щетки. Клапан может управляться микропроцессором. Работа контура обратной связи показана на фиг. 6, где показан пример процедуры чистки струей по типу зубной нити и щеткой, в которой обработка струей по типу зубной нити отключается, когда щетка перемещается слишком быстро или слишком медленно. Кроме того, как обсуждалось выше, даже если зубная щетка перемещается в пределах правильных пороговых значений скорости, обработка струей по типу зубной нити выполняется только тогда, когда струйное сопло направлено на межзубный промежуток или линию десен. В процедуре чистки струей по типу зубной нити и щеткой, показанной на фиг. 6, показан типичный двухминутный сеанс чистки для гигиены полости рта. Каждые 30 секунд устройство подает звуковой сигнал, который заставляет пользователя переключаться между квадрантами (щетка будет перемещаться быстро). Это видно на графике по пику скорости чистки (верхняя непрерывная линия), который заставляет клапан закрываться, когда скорость превышает пороговое значение, и струйная обработка останавливается (нижняя непрерывная линия). Как только скорость возвращается в пределы граничных условий, клапан снова открывается, и струйная обработка продолжается. Однако, если скорость щетки слишком низкая, клапан также закрывается.
Кроме того, обратная связь для пользователя предоставляется в виде акустического шума (гудения), светового сигнала, программного обеспечения обратной связи (например, встроенных в приложение сигналов) или вибрации, как только перемещение становится слишком быстрым и клапан закрывается. Другой сигнал подается пользователю, когда достигнута оптимальная скорость, чтобы побудить пользователя продолжить работу с этой скоростью. Пользователь получает дополнительный сигнал, когда скорость слишком низкая. Эта функция будет обучать и/или побуждать пользователя улучшить его или ее поведение при чистке зубов. В зубной щетке также присутствует акустическая, чистящая и встроенная в приложение обратная связь.
На фиг. 7 показан подробный пример взаимодействия рабочих частей типичной системы гибридной струи по типу зубной нити и зубной щетки. В общем, система имеет адаптивный контур управления, в котором перемещение щетки обнаруживается/измеряется и принимается в качестве входного параметра для адаптации настроек струйной обработки насоса (скорость, длительность импульса и т.д.). Таким образом, скорость струи или частота импульсов адаптируются к увеличению перемещения при чистке. На фиг. 7 стрелки от резервуара для воды к насосу, к клапану и к соплу соответствуют пути потока текучей среды, а стрелки от акселерометра к микропроцессору и от логики состояний к насосу/клапану соответствуют пути сигнала датчика. В этой системе скорость струйной обработки текучей средой или поток (скорость) регулируется в соответствии со скоростью щеточной очистки, чтобы обеспечить улучшенный процесс чистки. Перемещение щетки можно использовать в качестве входных данных для адаптации скорости струи: чем быстрее перемещается щетка, тем быстрее происходит струйная обработка. Это может быть обеспечено за счет использования адаптивного контура управления, содержащего подходящий контроллер (например, пропорциональный контроллер или ПИД-контроллер, если требуется больше стабильности) и датчик чистящего перемещения. Опять же, если перемещение будет слишком быстрым, струйная обработка будет остановлена. Микропроцессор запрограммирован таким образом, что он не только сможет решить, нужно ли закрывать клапан или нет, он также будет адаптировать скорость струи к скорости перемещения щетки. Опять же, показанная конструкция представляет собой лишь один приведенный для примера вариант осуществления, и, например, насос может регулироваться непосредственно микропроцессором и регулировкой мощности без клапана, например, посредством импульсного режима работы.
Системы по фиг. 5 и 7 могут иметь одинаковые конструктивные особенности, при этом микропроцессор может программироваться по-разному или иметь возможность переключаться между режимами работы.
Работа контура обратной связи показана на фиг. 8, где показан пример процедуры чистки струей по типу зубной нити и щеткой. Показан типичный двухминутный сеанс чистки для гигиены полости рта. Каждые 30 секунд устройство подает звуковой сигнал, который заставляет пользователя переключаться между квадрантами. Это видно на графике по пику скорости чистки, который заставляет клапан закрываться и струе останавливаться при превышении порогового значения. Что касается скорости струи, то чем быстрее перемещается щетка, тем выпускаются струи. Как только скорость щетки находится в пределах верхнего и нижнего пороговых значений, клапан снова открывается, и струйная обработка продолжается. Чем быстрее перемещается щетка, тем быстрее происходит струйная обработка, поскольку межзубные промежутки достигаются быстрее, и чистка межзубных промежутков будет более эффективной и действенной.
Однако есть два фактора, которые затрудняют правильную струйную обработку при быстром перемещении щетки:
• отклик интерпроксимального датчика является слишком медленным;
• запуск процедуры струйной очистки занимает слишком много времени.
Например, межзубной или интерпроксимальный промежуток, или линия десен могут быть обнаружены с помощью сенсорной технологии, упомянутой выше, но до подтверждения обнаружения и/или готовности струйного блока к выпуску текучей среды благодаря перемещению головки щетки, кончик струи или сопло может уже выйти за пределы межзубного промежутка, и струйная обработка будет неэффективной.
Таким образом, в дополнение к вышеописанным решениям, модифицированная форма струйной обработки все еще может быть активирована во время периода очистки. Это включает использование обнаружения предыдущего межзубного промежутка в сочетании со скоростью перемещения щетки для определения времени выпуска струи, для момента, когда кончик струи достигает следующего межзубного промежутка. Таким образом, по меньшей мере некоторая эффективная струйная обработка может быть проведена по меньшей мере на некоторых из межзубных промежутков. Первый межзубной промежуток после начала чистки может быть пропущен, если щетка перемещается только в одном направлении, но если обнаруживается межзубной промежуток, то, когда пользователь перемещает щетку назад и вперед, сопло может вернуться к ранее обнаруженному межзубному промежутку и выпустить струю.
Таким образом, работу можно резюмировать следующим образом:
• чистка обнаруживается на скорости, которая слишком высока для интерпроксимального определения текущего межзубного промежутка, но находится в пределах диапазона, в котором может произойти эффективная струйная обработка;
• устройство переходит в режим, в котором струя приостанавливается для первого межзубного промежутка;
• после измерения межзубного промежутка вводится задержка, после которой запускается струйная обработка. Таким образом, струйная обработка происходит на месте следующего межзубного промежутка.
Задержка определяется временем, необходимым для того, чтобы зонд переместился от места измерения (за пределы первого межзубного промежутка) к следующему промежутку. Это определяется скоростью чистки (которая уже измерена) и расстоянием между межзубными промежутками. В простом варианте осуществления последние могут быть просто средним межзубным промежутком (около 7-8 мм). Однако система может учитывать положение щетки во рту для определения межзубного промежутка (которое больше для больших коренных зубов). Еще в одной системе повторное измерение межзубных промежутков может быть использовано для дальнейшей персонализации задержки, например, посредством определения промежутка, для точного определения положения во рту, перемещения щетки и, следовательно, задержки до следующего межзубного промежутка.
Как обсуждалось выше, перемещение и скорость головки зубной щетки являются входными данными, используемыми для определения того, когда выпускать струю, а когда нет, а другими входным данными являются местоположения межзубных промежутков. Следующее обсуждение предоставляет дополнительную информацию об этих входных данных.
Следует отметить, что очистка биопленки намного эффективнее, когда превышается определенная пороговая скорость струйной обработки текучей средой. Эта пороговая скорость зависит от прочности биопленки, но составляет порядка 20-30 м/с, и следует отметить, что биопленка в интерпроксимальной области является менее прочной, чем на самих зубах, и поэтому ее легче удалить. Следовательно, в дополнение к струйной обработке, направленной на межзубный промежуток, и включению/выключению, когда головка зубной щетки перемещается слишком быстро или слишком медленно, система содержит насос и средство для работы в импульсном режиме. Насос работает с определенной частотой в течение нескольких циклов, а затем выключается и, таким образом, регулирует средний расход. Кроме того, как обсуждалось выше, скорость струйной обработки может учитывать, насколько быстро головка щетки перемещается относительно зубов.
Что касается измерения перемещения головки гибридной струи по типу зубной нити и зубной щетки относительно зубов, датчик, который используется для определения направления и/или скорости головки и, следовательно, также сопла, содержащегося в головке (точки подачи текучей среды), является предпочтительно бесконтактным, т.е. между зубами и действующим датчиком нет физического контакта. Есть несколько вариантов измерения направления и, при необходимости, скорости сопла. Варианты следующие:
- Акселерометр. Этот акселерометр помещен в сопло или в трубку, но также может находиться в ручке рядом с положением рук.
- Устройство оптической обработки изображений, такое как оптическая мышь. Датчик оптической мыши предпочтительно расположен в сопле или также может находиться в ручке.
- Оптический коррелятор, такой как лазерный датчик, использующий самосмешивающуюся интерференцию и/или эффект Доплера.
- датчик, срабатывающий при движении нижней части сопла относительно обрабатываемой поверхности.
Пример такого датчика показан на фиг. 9. На печатной плате находятся два токопроводящих шарика, аналогичные шарикам, которые обеспечивают автоматическое отключение при использовании в утюгах. Шарики используются для измерения наличия ускорения как мгновенного импульса. Из-за овальной формы щелевых отверстий шарики должны перемещаться вверх из плоскости печатной платы для перемещения в боковом направлении. Путем регулировки формы щелевого отверстия можно настроить необходимое ускорение для срабатывания контакта. Таким образом обеспечивается простой датчик перемещения. Действие переключения интерпретируется микропроцессором для определения направления сопла и скорости. При необходимости можно определить только перемещение, а не скорость, например, с помощью переключателей или тензодатчиков. Это позволяет подобрать один простой датчик перемещения, в котором могут использоваться акселерометры/гироскопы и т.д.
Насос представляет собой поршневой насос с рабочей частотой в диапазоне 10-100 Гц, а более предпочтительно в диапазоне 20-60 Гц. Сопло струйного блока может находиться на головке щетки в различных положениях, посередине (между щетинками), спереди (снаружи щетинок) или сзади, и в этом случае головку щетки, возможно, придется поворачивать при использовании текучей среды. И следует отметить, что в дозировке текучей среды может быть только жидкость или комбинация жидкости и газа, и при этом жидкостью может быть вода. Как обсуждалось выше, сенсорная технология используется для определения положения сопла относительно межзубной области на зубах.
В дополнение к прерыванию струи или в качестве альтернативы пользователю может быть предоставлена обратная связь, которая позволяет ему изменять свой протокол чистки зубов, чтобы лучше чистить зубы. Обратная связь с пользователем при слишком большой или слишком маленькой скорости перемещения зубной щетки, может быть предоставлена несколькими способами. Вибрациями, генерируемыми небольшим двигателем с эксцентриситетом, аналогично мобильным телефонам, или, в качестве альтернативы, можно использовать световое кольцо на ручке, которое меняет цвет (например, красный, чтобы указать, что слишком быстро или слишком медленно, и зеленый, при нахождении в диапазоне, в котором насос может работать для эффективной чистки с минимальным расходом воды).
В отношении перемещения гибридной системы струи по типу зубной нити и зубной щетки существует пороговое значение максимальной скорости, выше которой струйная обработка прекращается, которое можно рассчитать, как подробно описано ниже. Скорость потока может быть согласована со скоростью перемещения, как описано ниже. Нижний порог скорости можно рассчитать или установить произвольно.
Известно, что удаление биопленки пропорционально общему импульсу жидкости, Ptot, следовательно,
V bf=Abf⋅hbf≈K⋅Ptot
Здесь Abf - площадь удаленной биопленки, а hbf - толщина удаленной биопленки, которая составляет ≈100 мкм, а K - постоянная величина, указывающая на прочность биопленки, которая, по оценкам, для межзубного налета составляет K≈1⋅10-7 кг-1м2с, а при сильном налете на передних зубах ≈1⋅10-8 кг-1м2с. Общий импульс можно записать в виде
P tot=VMl=V⋅ρl⋅Ql⋅Ttot,
При средней скорости V жидкости (для простоты предполагается, что она постоянна во времени) на самом деле эта скорость изменяется со временем, ρl - плотность жидкости, Ql - расход и Ttot - общее время, в течение которого жидкость подается на Abf.
Для струйного устройства можно использовать следующее:
Q l=Aj⋅V=π/4 d2 V
Площадь чистки, когда струя зафиксирована наодном месте, имеет порядок площади струи Aj, которая определяется диаметром струи d. Для системы струйного типа применяется следующее: Abf=f⋅Aj, с коэффициентом f больше 1. Из приведенных выше уравнений можно вывести типичное время для удаления всей биопленкипри удерживании направления струи постоянным.
T tot=f⋅hbf/(K⋅ρl⋅V2)
На фиг. 10 время чистки области струей показано для случая межзубного налета K≈1⋅10-7 кг-1м2с, и следует отметить, что эти временные периоды очень малы, т.е. эту область относительно легко очистить. Следует отметить, что разница между струей и распылением будет заключаться в том, что коэффициент f увеличится до очень больших значений порядка 40-80, что приведет к гораздо большему времени чистки, но все же относительно небольшому, в пределах 0,2 секунды.
Обычно время контакта воды в конкретном месте составляет порядка
T con≈dcl/U
Чтобы чистка выполнялась за один проход, время контакта должно превышать время, необходимое для чистки места. Следовательно, из приведенных выше уравнений можно получить значение максимальной скорости, которая может использоваться для очистки одного места.
При этом dcl=√f⋅d
U<d⋅K⋅ρlV2/(√f⋅hbf)
На фиг. 11 показана максимальная скорость для различных средних скоростей жидкости и чистящих фракций при диаметре сопла d, составляющем 0,8 мм и K=1 10-7 кг-1м2с. Для струи, т.е. небольшого f, можно видеть, что максимально допустимый U довольно велик (например, 0,14 м/с для V=20 м/с и f=5).
Следует отметить, что для распыления с f≈40-100 потребуется больше времени для чистки, и, следовательно, максимальная скорость, необходимая для чистки, должна быть меньше обычной скорости, с которой струя перемещается по основе, и, следовательно, нельзя обеспечить оптимальную чистку, если пользователь не снизит скорость ручки.
Однако приведенный выше анализ показывает, как можно рассчитать верхнюю пороговую скорость перемещения, при превышении которой струю следует остановить, даже если струя из сопла направлена на межзубной промежуток или линию десен.
В другом приведенном для примера варианте осуществления предоставлена компьютерная программа или элемент компьютерной программы, отличающиеся возможностью выполнения этапов способа в соответствии с одним из предыдущих вариантов осуществления в соответствующей системе.
Таким образом, элемент компьютерной программы может храниться в вычислительном блоке, таком как смартфон, ноутбук, планшет или вычислительный блок в устройстве для чистки полости рта, например, зубной щетке, которое также может быть частью варианта осуществления. Этот вычислительный блок может быть выполнен с возможностью выполнения или побуждения к выполнению этапов способа, описанного выше. Более того, он может быть выполнен с возможностью работы компонентов вышеописанной системы. Вычислительный блок может быть выполнен с возможностью автоматической работы и/или для выполнения команд пользователя. Компьютерная программа может быть загружена в рабочую память процессора данных. Таким образом, процессор данных может быть оборудован для выполнения способа согласно одному из предыдущих вариантов осуществления.
Этот приведенный для примера вариант осуществления изобретения охватывает как компьютерную программу, которая с самого начала использует изобретение, так и компьютерную программу, которая посредством обновления превращает существующую программу в программу, которая использует изобретение.
Кроме того, элемент компьютерной программы может обеспечивать все необходимые этапы для выполнения процедуры приведенного для примера варианта осуществления способа, как описано выше.
Согласно еще одному приведенному для примера варианту осуществления настоящего изобретения предложен компьютерочитаемый носитель, такой как CD-ROM, USB-накопитель и т.п., в котором компьютерочитаемый носитель имеет элемент компьютерной программы, сохраненный на нем, причем этот элемент компьютерной программы описан в предыдущем разделе.
Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптическое запоминающее устройство или твердотельное запоминающее устройство, поставляемое вместе с другими аппаратными средствами или как часть этих средств, но может также распространяться и в другой форме, например, через Интернет или другие проводные или беспроводные системы дистанционной связи.
Однако компьютерная программа также может быть представлена в сети, такой как World Wide Web, и может быть загружена в рабочую память процессора данных из такой сети. Согласно еще одному приведенному для примера варианту осуществления настоящего изобретения предоставлен носитель для обеспечения доступности элемента компьютерной программы для загрузки, причем этот элемент компьютерной программы выполнен с возможностью выполнения способа согласно одному из ранее описанных вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны со ссылкой на различные предметы изобретения. В частности, некоторые варианты осуществления описаны со ссылкой на формулу изобретения типа способа, тогда как другие варианты осуществления описаны со ссылкой на формулу изобретения типа устройства. Однако специалист в данной области поймет из приведенного выше и последующего описания, что, если не указано иное, в дополнение к любой комбинации признаков, принадлежащих одному типу предмета изобретения, также считается, что любая комбинация признаков, относящихся к различным предметам изобретения, считается раскрытой данной заявкой. Однако все признаки могут быть объединены, обеспечивая синергетические эффекты, которые представляют собой нечто большее, чем простое суммирование признаков.
Несмотря на то, что изобретение проиллюстрировано и описано подробно на чертежах и в предшествующем описании, такое изображение и описание следует считать иллюстративным или приведенным для примера, а не ограничительным. Настоящее изобретение не ограничено раскрытыми вариантами осуществления. Другие вариации описанных вариантов осуществления могут быть поняты и реализованы специалистом в данной области техники при осуществлении настоящего изобретения на практике после ознакомления с чертежами, описанием и зависимыми пунктами формулы изобретения.
В пунктах формулы изобретения слово "содержащий" не исключает других элементов или этапов, а грамматические средства выражения единственного числа не исключают множества. Один процессор или иной модуль может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что определенные меры изложены во взаимно различных зависимых пунктах формулы изобретения не означает, что комбинация этих мер не может быть использована для получения преимущества. Никакие ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧИСТЯЩИЙ ПРИБОР | 2016 |
|
RU2713966C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА С СИСТЕМОЙ ВОЗДУШНОЙ ОЧИСТКИ | 2008 |
|
RU2435548C1 |
| ЧИСТЯЩИЙ ПРИБОР | 2016 |
|
RU2708366C2 |
| ЧИСТЯЩИЙ ПРИБОР | 2015 |
|
RU2675677C1 |
| ЧИСТЯЩИЙ ПРИБОР | 2016 |
|
RU2714664C2 |
| ВВЕДЕНИЕ ПРОТИВОМИКРОБНЫХ ПРЕПАРАТОВ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2017 |
|
RU2724850C1 |
| ЗУБНАЯ ЩЕТКА С ИЗМЕНЯЕМОЙ КАСАНИЕМ СИСТЕМОЙ ВЫБОРА И СПОСОБ ЕЕ РАБОТЫ | 2014 |
|
RU2677157C1 |
| УСТРОЙСТВО ДЛЯ ЧИСТКИ ЗУБОВ ПОЛОСТИ РТА С ПОСЛЕДОВАТЕЛЬНЫМИ ВО ВРЕМЕНИ ИНДИВИДУАЛИЗИРУЕМЫМИ ВЫБРОСАМИ ЖИДКОСТИ | 2012 |
|
RU2624321C2 |
| ЗУБНАЯ ЩЕТКА С СИСТЕМОЙ ВЫБОРА НА ОСНОВЕ ПЕРЕМЕННОГО СЕНСОРНОГО ВОЗДЕЙСТВИЯ И СПОСОБ ЕЕ РАБОТЫ | 2014 |
|
RU2652325C1 |
| УСТРОЙСТВО И СПОСОБЫ СБОРА ПРОБ СЛЮНЫ ИЗ ПОЛОСТИ РТА | 2019 |
|
RU2794608C2 |
Изобретение относится к системе (10) чистки зубов на основе текучей среды, содержащей удерживаемый корпус (20), блок (30) подачи текучей среды, по меньшей мере один датчик (40) и блок (50) управления. Удерживаемый корпус выполнен с возможностью соединения с головкой (60). Блок (30) подачи текучей среды выполнен с возможностью соединения с соплом (80), выполненным с возможностью выпуска текучей среды, и причем сопло (80) содержится внутри головки (60). По меньшей мере один датчик (40) выполнен с возможностью предоставления информации, включая информацию о скорости, относящуюся к головке (60), относительно зубов пользователя. По меньшей мере один датчик (40) выполнен с возможностью предоставления информации блоку (50) управления. Блок (50) управления выполнен с возможностью использования информации для обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80) на зубы пользователя. Использование системы чистки зубов позволяет, используя меньше очищающей текучей среды, обеспечить оптимальную чистку зубов, обеспечить пользователю, за счет предоставления обратной связи, возможность эффективно размещать и перемещать удерживаемый корпус таким образом, чтобы чистящая струя была направлена должным образом. 3 н. и 11 з.п. ф-лы, 11 ил.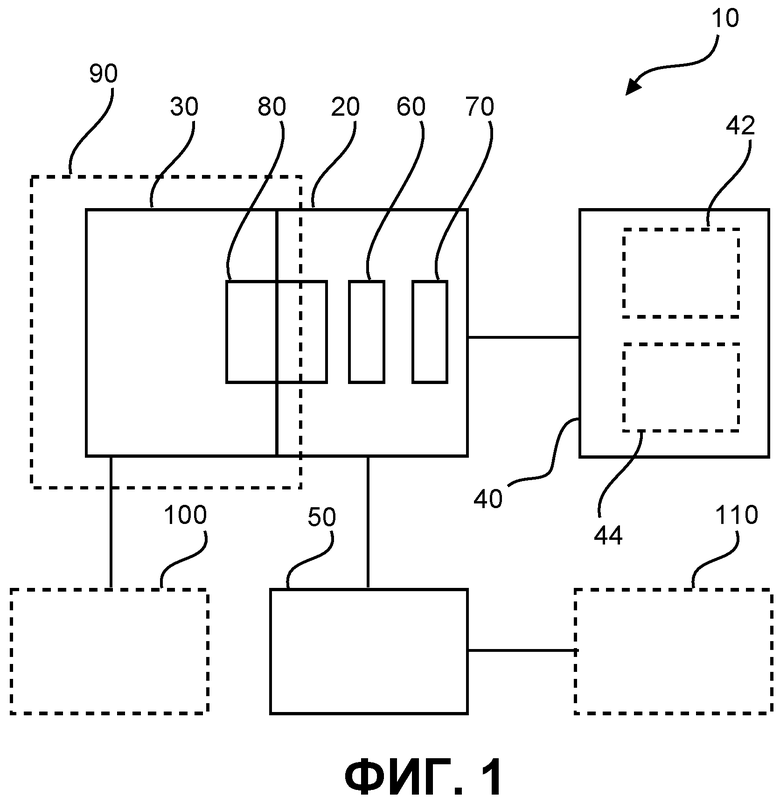
1. Система (10) чистки зубов на основе текучей среды, содержащая:
- удерживаемый корпус (20), выполненный с возможностью соединения с головкой (60);
- блок (30) подачи текучей среды, выполненный с возможностью соединения с соплом (80) для выпуска текучей среды, причем сопло содержится внутри головки (60);
- по меньшей мере один датчик (40), выполненный с возможностью обеспечения предоставления информации, относящейся к положению головки (60) относительно зубов пользователя, причем по меньшей мере один датчик содержит датчик (44) перемещения для определения информации о скорости, относящейся к скорости головки (60) относительно зубов пользователя, а указанная информация содержит информацию о скорости; и
- блок (50) управления, выполненный с возможностью использования информации о скорости от датчика перемещения для: обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80) на зубы пользователя и остановки выпуска текучей среды из сопла (80) блоком (30) подачи текучей среды, когда скорость головки (60) больше первого порогового уровня и/или меньше второго порогового уровня.
2. Система (10) чистки зубов на основе текучей среды по п. 1, причем система (10) содержит блок (110) пользовательского интерфейса, а блок (50) управления выполнен с возможностью управления блоком (110) пользовательского интерфейса для вывода пользователю информации, относящейся к перемещению головки (60).
3. Система (10) чистки зубов на основе текучей среды по п. 2, в которой вывод информации блоком (110) пользовательского интерфейса включает вывод информации о том, что скорость головки (60) больше указанного первого порогового уровня и/или меньше указанного второго порогового уровня.
4. Система (10) чистки зубов на основе текучей среды по любому из пп. 1-3, в которой по меньшей мере один датчик содержит датчик (42) положения, выполненный с возможностью определения информации о положении, относящейся к головке (60), в отношении зубов пользователя.
5. Система (10) чистки зубов на основе текучей среды по п. 4, в которой блок (50) управления выполнен с возможностью использования информации, относящейся к головке (60) в отношении зубов пользователя, для остановки выпуска текучей среды из сопла (80) блоком (30) подачи текучей среды, когда головка (60) размещена в таком положении, что текучая среда направлена для попадания на поверхность зубов пользователя.
6. Система (10) чистки зубов на основе текучей среды по п. 4, в которой информация о положении содержит информацию, относящуюся к размещению головки (60) в таком положении, что сопло (80) находится у межзубного промежутка зубов пользователя.
7. Система (10) чистки зубов на основе текучей среды по п. 6, в которой блок (50) управления выполнен с возможностью обеспечения выпуска текучей среды из сопла (80) блоком (30) подачи текучей среды, когда головка (60) размещена в таком положении, что текучая среда направлена для попадания в межзубный промежуток зубов пользователя.
8. Система (10) чистки зубов на основе текучей среды по любому из пп. 4-7, в которой информация о положении содержит информацию, относящуюся к размещению головки (60) в таком положении, что сопло (80) находится у линии десен зубов пользователя, а блок (50) управления выполнен с возможностью использования указанной информации для обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80), когда головка (60) находится в таком положении, что текучая среда направлена для попадания в места, расположенные у линии десен зубов пользователя.
9. Система (10) чистки зубов на основе текучей среды по любому из пп. 4-8, в которой блок (50) управления выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка и использования информации о скорости для определения того, когда головка (60), перемещенная из этого положения, возвращена в это положение, и в которой блок (50) управления выполнен с возможностью активации блока (30) подачи текучей среды для выпуска текучей среды из сопла (80), когда головка (60) возвращена в положение первого межзубного промежутка.
10. Система (10) чистки зубов на основе текучей среды по любому из пп. 4-9, в которой блок (50) управления выполнен с возможностью использования информации о положении для определения положения первого межзубного промежутка и использования информации о скорости для определения того, когда головка (60) переместилась в положение второго межзубного промежутка, смежного с первым межзубным промежутком, и в котором блок (50) управления выполнен с возможностью активации блока (30) подачи текучей среды для выпуска текучей среды из сопла (80), когда головка (60) расположена на втором межзубном промежутке.
11. Система (10) чистки зубов на основе текучей среды по любому из пп. 1-10, в которой блок (50) управления выполнен с возможностью обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80) с одним или более настроенными параметрами: скоростью струи текучей среды, частотой струи текучей среды, продолжительностью струи текучей среды.
12. Система (10) чистки зубов на основе текучей среды по любому из пп. 1-11, в которой удерживаемый корпус (20) содержит блок (30) подачи текучей среды, по меньшей мере один датчик (40) и блок (50) управления, причем блок (50) управления выполнен с возможностью использования информации для обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80), когда сопло (80) находится в одном положении из одного или более положений относительно зубов пользователя.
13. Система (10) чистки зубов на основе текучей среды по любому из пп. 1-12, в которой головка (60) содержит щетинки (70).
14. Элемент компьютерной программы для управления системой чистки зубов на основе текучей среды по любому из пп. 1-13, который при исполнении процессором выполнен с возможностью выполнения следующих этапов:
- получение информации по меньшей мере от одного датчика (40), относящейся к положению головки (60) относительно зубов пользователя,
причем информация содержит информацию о скорости от датчика (44) перемещения и относящуюся к скорости головки (60) относительно зубов пользователя, и использование информации о скорости для:
обеспечения блоку (30) подачи текучей среды возможности выпуска текучей среды из сопла (80) на зубы пользователя и
остановки выпуска текучей среды из сопла (80) блоком (30) подачи текучей среды, когда скорость головки (60) больше первого порогового уровня и/или меньше второго порогового уровня.
15. Компьютерочитаемый носитель, на котором хранится элемент программы по п. 14.
| ПОЛУМОСТОВОЙ ГАЛЬВАНИЧЕСКИ ИЗОЛИРОВАННЫЙ ИМПУЛЬСНЫЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2538301C1 |
| WO 2018086924 A1, 17.05.2018 | |||
| Способ получения 1-амино-4-гидроксиантрахинона | 1989 |
|
SU1698252A1 |
| US 2016317267 A1, 03.11.2016 | |||
| Устройство для автоматического отбора проб воды на заданных глубинах | 1977 |
|
SU634151A1 |
| CN 103108606 A, 15.05.2013. | |||

