Настоящая система относится к системе зубной щетки, более конкретно, к системе электронной зубной щетки, имеющей чувствительный к касанию корпус для выбора одной или нескольких функций, и способу ее работы.
Устройства для ухода за полостью рта используются для ухода за полостью рта и, как правило, включают в себя электрические зубные щетки и устройства для чистки водой межзубных промежутков. Электрические зубные щетки как правило имеют вращающиеся и/или вибрирующие головки с щетинками, которые контактируют с зубами пользователя так, чтобы чистить зубы и/или удалять зубной налет. Хорошо известная вибрационная зубная щетка Philips Sonicare™ имеет вибрирующую головку. Устройства для чистки межзубных промежутков водой, такое как Philips Airfloss™ и т.п., как правило, используют воду в качестве чистящего средства и имеют головку, которая выбрасывает струю воды, чтобы принудительно удалить инородные тела и вещества из промежутков между зубами пользователя. Для приведения в действие большинства устройств для ухода за полостью рта (например, электрических зубных щеток и устройств для чистки водой межзубных промежутков) пользователь должен нажать маленькую кнопку включения/выключения. Эта кнопка подвержена тому, что на ней собираются инородные тела и вещества, и ее трудно найти во время использования, особенно когда пользователь не смотрит прямо на устройство для ухода за полостью рта.
Система(ы), устройство (устройства), способ(ы), компоновка(и), пользовательский интерфейс (ы), компьютерная программа(ы), процессы и т.д. (каждое из которых будет в дальнейшем, обозначаться как система, если контекст не указывает на иное), описываемые в настоящем документе, решают проблемы систем предшествующего уровня техники.
В соответствии с вариантами осуществления настоящей системы, раскрывается устройство для полости рта, содержащее участок корпуса, имеющий первый и второй концы, и участок сжатия; приспособление для полости рта, соединенное с первым концом участка корпуса; чувствительный к касанию (TS) датчик, который расположен на участке корпуса, и выводящий показание датчика, указывающее силу, приложенную пользователем к нему; и контроллер, выполненный с возможностью сравнения показания датчика, по меньшей мере, с одним пороговым значением, и приведения в действие приспособления для полости рта на основании результатов сравнения.
Приспособление для полости рта может содержать, по меньшей мере, одно из: зубную щетку, сопло для воды, Airfloss и бор, и TS датчик может содержать чувствительный к силе резистор, который выводит значение сопротивления, и может включать в себя множество полимерных слоев, которые наслаиваются друг на друга и которые по существу опоясывают участок корпуса. Показание датчика может быть величиной сопротивления, которое пропорционально силе, приложенной к TS датчику.
Кроме того, контроллер может быть дополнительно выполнен с возможностью определения частоты для возвратно-поступательного привода приспособления для полости рта в соответствии с результатами сравнения. Контроллер может быть дополнительно выполнен с возможностью определения частоты для приведения в движение приспособления для полости рта в соответствии с показанием датчика, основанном на взаимно-однозначном соответствии, и/или на дискретной основе. Для того, чтобы привести в действие приспособление для полости рта, контроллер может управлять приводом, который соединен с приспособлением для полости рта, чтобы обеспечить электродвижущую силу приспособлению для полости рта, где привод содержит, по меньшей мере, одно из: ротационный двигатель, линейный двигатель и насос. Резервуар для текучей среды может быть соединен с насосом.
Другой вариант осуществления включает в себя способ приведения в действие устройства для полости рта, имеющего участок корпуса и приспособление для полости рта, проходящее от участка корпуса, причем приспособление для полости рта соединено с приводом, участок корпуса имеет участок сжатия, расположенный между противоположными концами участка корпуса, способ выполняется, по меньшей мере, одним контроллером устройства для полости рта и содержит этапы: получения информации датчика, сгенерированной чувствительным к касанию (TS) датчиком, расположенным на участке захвата участка корпуса, причем информация датчика соответствует силе, приложенной пользователем к поверхности TS датчика; выбора функции из множества функций на основе информации датчика; и управления приводом в соответствии с выбранной функцией. Способ может дополнительно содержать акт формирования TS датчиком информации датчика, чтобы включать в себя значение импеданса, например, резистивное и/или емкостное значение, которое соответствует силе, приложенной пользователем к поверхности TS датчика. TS датчик может включать в себя, по меньшей мере, одно кольцо, которое опоясывает участок корпуса. Акт выбора функции из множества функций может включать в себя акт определения частоты, на которой запускается привод в соответствии с информацией датчика на основе взаимно-однозначного соответствия и/или на дискретной основе. Способ может дополнительно содержать акт управления дополнительным приводом для управления и выдвижения щетинок из приспособления для полости рта в соответствии с выбранной функцией.
Еще один вариант осуществления включает в себя постоянный машиночитаемый носитель, содержащий машинные инструкции, которые, при их исполнении процессором или контроллером, настраивают процессор /контроллер на управление работой устройства для полости рта путем выполнения операций описанного выше способа.
Настоящее изобретение поясняется более подробно на следующих примерных вариантах осуществления и со ссылкой на фигуры, на которых идентичные или подобные элементы частью обозначены одинаковыми ссылочными позициями, и признаки различных примерных вариантов осуществления могут объединяться. На чертежах:
на ФИГ. 1 показан вид спереди в перспективе участка системы зубной щетки с чувствительным к касанию корпусом в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 2 показан вид спереди в перспективе участка системы зубной щетки с чувствительным к касанию корпусом в соответствии с другими вариантами осуществления настоящей системы;
на ФИГ. 3 показан поперечный разрез участка системы зубной щетки, выполненный по линиям 3-3, показанной на ФИГ. 1, в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 4 показан развернутый вид в перспективе датчика давления типа чувствительного к силе резистора в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 5 показан вид сбоку датчика давления типа чувствительного к силе резистора, установленного в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 6 показан развернутый вид в перспективе датчика давления типа воспринимающего силу резистора в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 7 показан вид сбоку в перспективе участка системы зубной щетки, расположенного на зарядном устройстве в соответствии с вариантами осуществления настоящей системы;
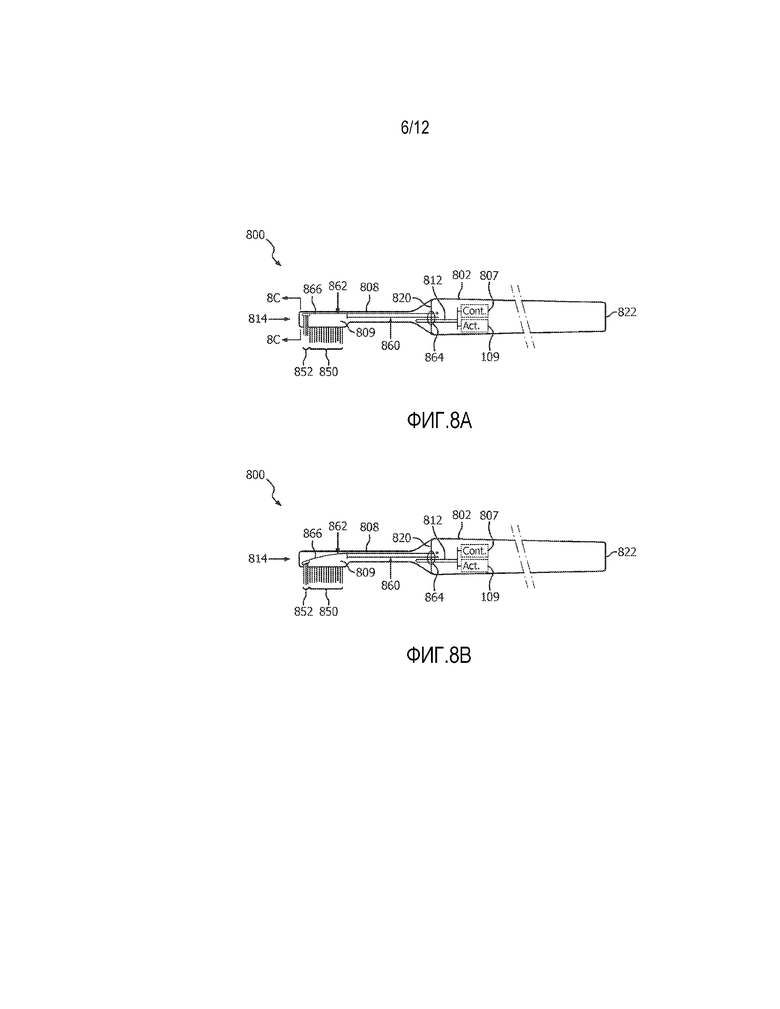
на ФИГ. 8A показан вид сбоку в перспективе с частичным вырезом участка системы зубной щетки с чувствительным к касанию корпусом, включающий в себя привод из электроактивного (ионного) полимера (ЭАП) в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 8B показан вид сбоку в перспективе с частичным вырезом участка системы зубной щетки с напряжением, поданным на привод из ЭАП в соответствии с вариантами осуществления настоящей системы;
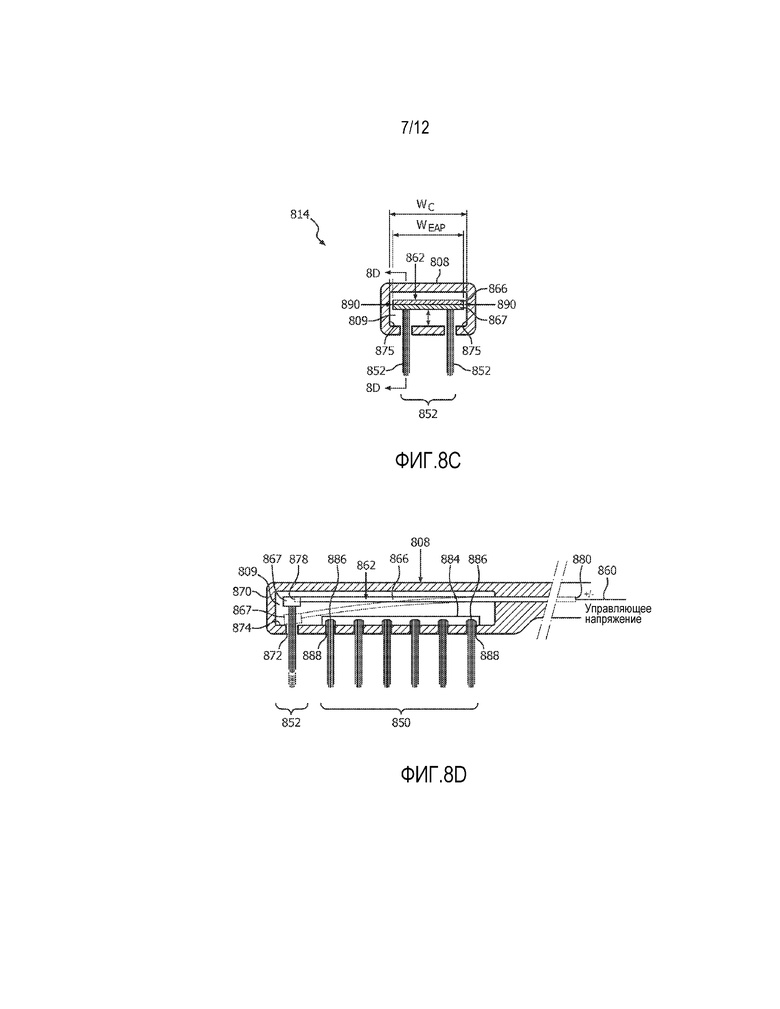
на ФИГ. 8C показан вид в поперечном разрезе участка системы зубной щетки, выполненном по линиям 8С-8С ФИГ. 8A в соответствии с вариантами осуществления настоящей системы.
на ФИГ. 8D показан вид в поперечном разрезе участка системы зубной щетки, выполненном по линиям 8D-8D ФИГ. 8C в соответствии с вариантами осуществления настоящей системы.
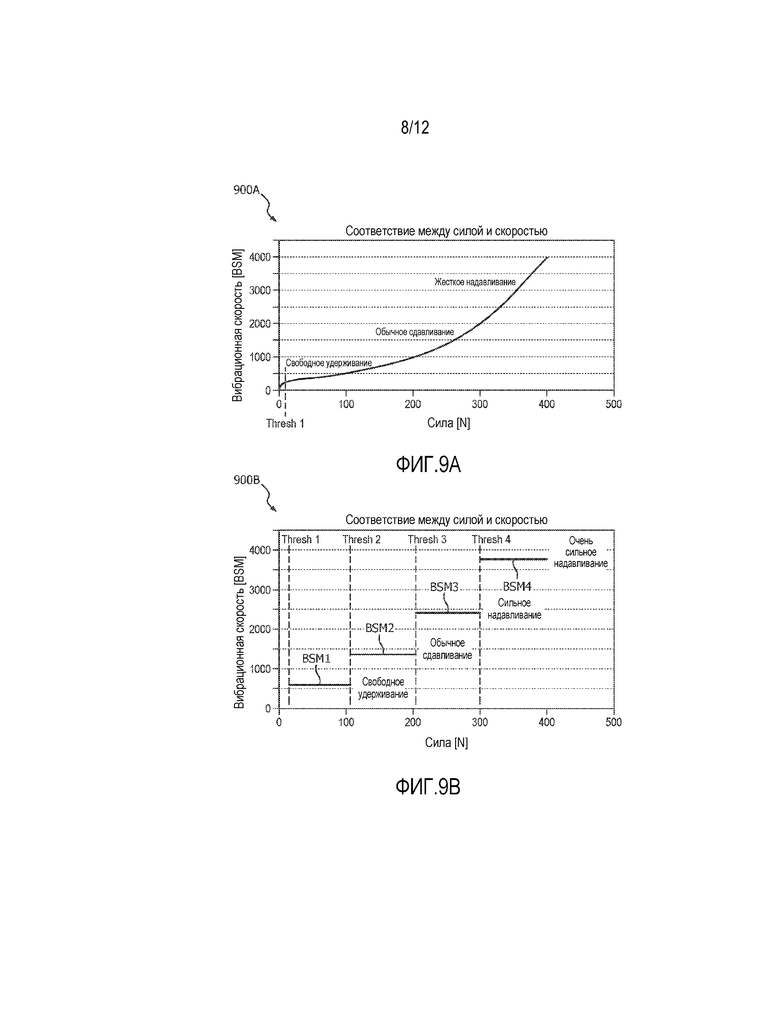
На ФИГ. 9A показан график, который иллюстрирует непрерывную прямую зависимость между силой, приложенной к датчику(ам) давления и количеством мазков кистью в минуту (BSM) в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 9B показан график, который иллюстрирует дискретную зависимость между силой, приложенной к датчику(ам) давления и значениями BSM в соответствии с вариантами осуществления настоящей системы;
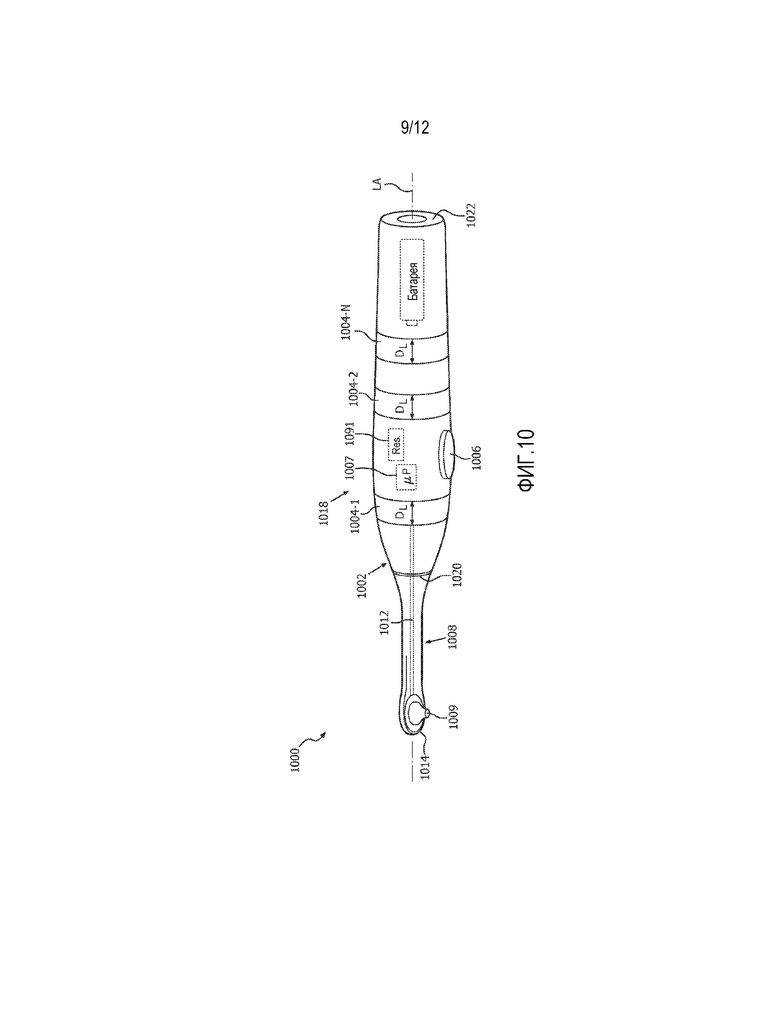
на ФИГ. 10 показан вид спереди в перспективе участка системы устройства (IDCD) для чистки межзубных промежутков с чувствительным к касанию корпусом в соответствии с вариантами осуществления настоящей системы;
на ФИГ. 11 показан вид спереди в перспективе участка системы IDCD с чувствительным к касанию корпусом в соответствии с другими вариантами осуществления настоящей системы;
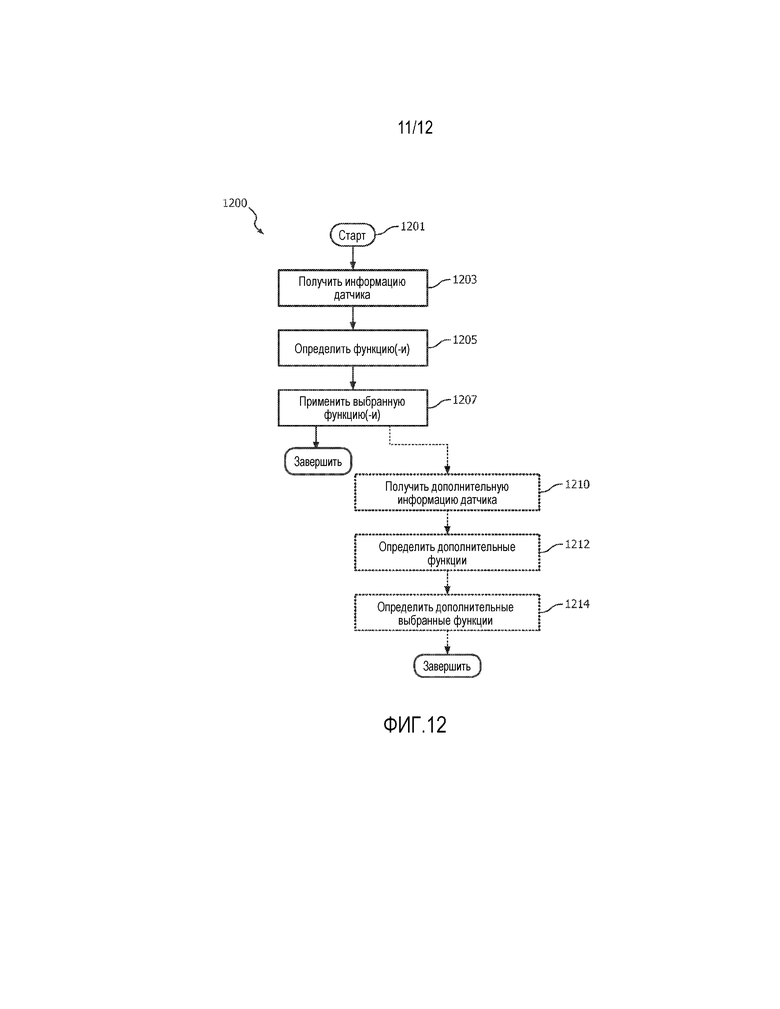
на ФИГ. 12, которая представляет собой схему последовательности операций, показан процесс, выполняемый системой в соответствии с вариантами осуществления настоящей системы; и
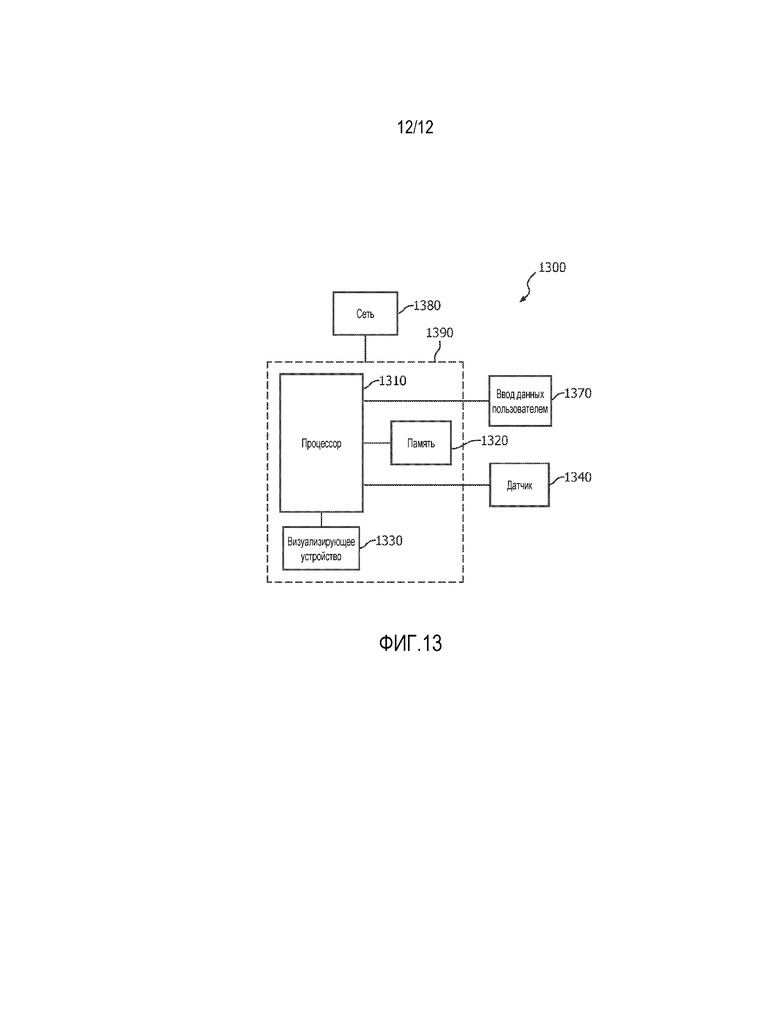
на ФИГ. 13 показан участок системы в соответствии с вариантами осуществления настоящей системы.
Ниже приведены описания иллюстративных вариантов осуществления, которые при рассмотрении в сочетании со следующими чертежами продемонстрируют выше отмеченные признаки и преимущества, а также и другие. В последующем описании, для целей пояснения, а не ограничения, излагаются такие иллюстративные детали, как архитектура, интерфейсы, методы, атрибуты элементов, и т.д. Однако специалисту в данной области техники очевидно, что другие варианты осуществления, которые отступают от этих деталей по-прежнему будут находиться в пределах объема прилагаемой формулы изобретения. Кроме того, для целей наглядности, подробные описания хорошо известных устройств, схем, средства, методов и способов опущены, чтобы не загромождать описание настоящей системы. Следует четко понимать, что чертежи прилагаются в иллюстративных целях и не отражают весь объем настоящей системы. На прилагаемых чертежах одинаковые ссылочные номера на разных чертежах могут обозначать подобные элементы.
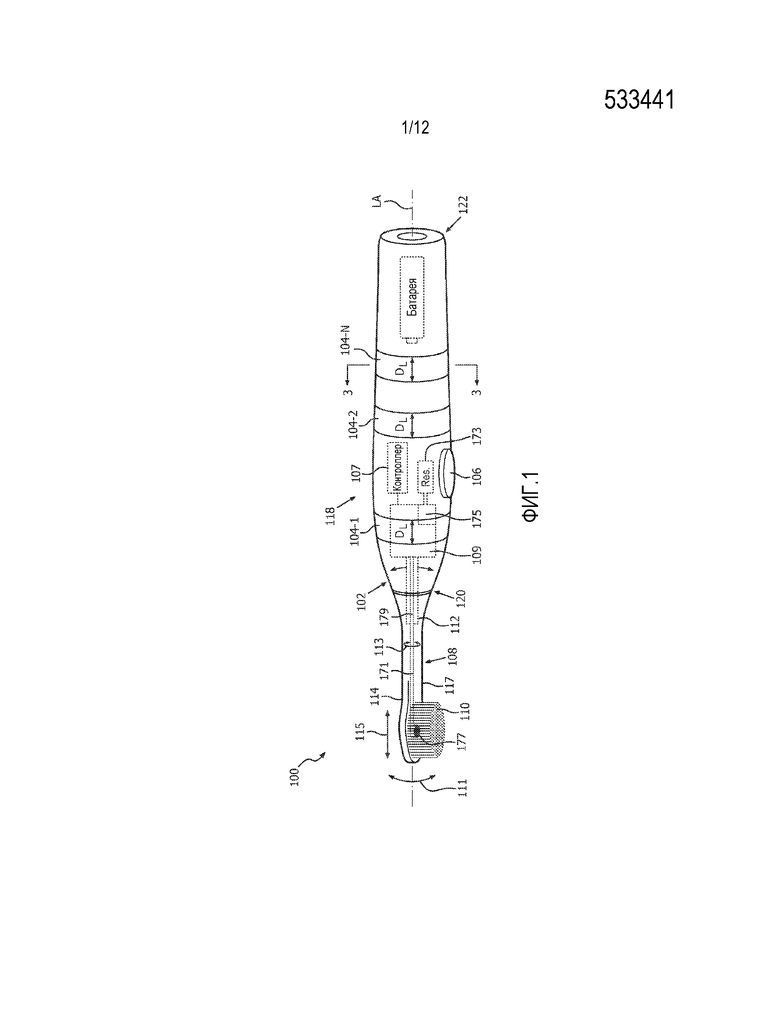
На ФИГ. 1 показан вид спереди в перспективе участка системы 100 (далее для ясности система 100) зубной щетки с чувствительным к касанию участком 102 (также обозначаемым как корпус 102) корпуса в соответствии с вариантами осуществления настоящей системы. Чувствительный к касанию (TS) корпус 102 может иметь первый и второй концы 120 и 122, соответственно, участок 118 сжатия (также обозначаемый как место 118 хвата), расположенный между первым и вторым концами 120 и 122 соответственно, и один или несколько чувствительных к касанию (TS) датчиков, таких как чувствительные к касанию (TS) кольца 104-1 до 104-N (как правило 104-x) и/или TS датчик 106 (показанный, как круглая кнопка) кнопочного типа, выполненный в любом подходящей компоновке. TS кольца 104-x могут проходить вдоль продольной оси (LA) корпуса 102 на расстояние DL и которые могут по существу опоясывать корпус 102. Различные TS кольца 104-х могут иметь одинаковые или разные расстояния DL. TS датчики (например, включающие в себя 104-x и/или 106) могут воспринимать силу, приложенную к ним (например, пользователем) и формировать соответствующую информацию датчика. Эта информация датчика может предоставляться контроллеру или процессору 107 системы 100 для дальнейшей обработки. Хотя TS датчики 104-x и/или 106 показаны в виде колец, следует понимать, что можно использовать любые желаемые формы TS датчиков, в которых число и распределение TS датчиков или точек /зон измерения можно выбрать для различения различных надавливающих действий и/или чтобы избежать ложных действий или ошибок.
TS датчики (например, 104-x и/или 106) могут воспринимать силу, которую пользователь прикладывает к участкам места 118 хвата, которые имеют TS датчики (104-x и/или 106), использующие любой подходящий измерительный способ. Например, TS датчики могут включать в себя чувствительные к силе (FS) датчики, такие как тензометрические, пьезоэлектрические, емкостные и/или датчики резистивного типа, которые могут быть интегрированы в место 118 хвата корпуса 102. FS датчики резистивного типа могут включать в себя один или несколько воспринимающих силу резисторов, содержащих проводящий полимер, которые могут изменять сопротивление предсказуемым образом вслед за приложением силы к одному или нескольким частям своей поверхности. Это сопротивление может затем выводиться как информация датчика для дальнейшей обработки контроллером 107. Более конкретно, контроллер 107 может перевести выходное сопротивление в значение, указывающее на силу, прилагаемую пользователем к соответствующему FS датчику. Поскольку усилие, прилагаемое пользователем, увеличивается, сопротивление возрастает и значение, указывающее, силу, прилагаемую пользователем к соответствующему FS датчику, может соответственно возрасти (например, линейно, и т.д.). Также предполагается, что варианты осуществления настоящей системы могут включать в себя множество TS датчиков (например, выполненных в виде массива, матрицы, и т.д., в некоторых областях, в требуемой конфигурации и т.д.) чтобы улучшить обнаружение надавливающих действий сжимания и/или предоставить информацию, указывающую на область места 118 хвата, к которой прикладывается сила.
Приспособление 108 (также обозначаемое как приспособление 108) для чистки полости рта, выполненное с возможностью чистки полости рта, может быть соединено с корпусом 102, с использованием любого подходящего способа, (например, фрикционной посадки и т.д.). Приспособление 108 может включать в себя корпус 117 приспособления и может включать в себя головку 114 (также обозначаемую как головка щетки или зубная щетка 114) зубной щетки, имеющую кисточки 110 (щетина, резина и т.д.). Дополнительно или альтернативно, корпус 117 приспособления может включать в себя сопло для воды. Приспособление 108 может быть соединено с приводом 109, таким как электродвигатель, использующий любой подходящий способ, такой как через стержень 112 привода, таким образом, чтобы приводиться в действие электродвигателем. Однако, в других вариантах осуществления, приспособление 108 может быть соединено с приводом 109, с помощью магнитной муфты. Электродвигатель может включать в себя коллекторные, линейные или вибрационные двигатели, которые могут производить соответствующие движения и/или преобразование, которое может преобразовать движение в нужный тип (например, вращательное движение в колебательно-вращательное движение, и т.д.). Например, двигатель, который используется, выполнен с возможностью порождать вибрации в широком диапазоне частот, чтобы создать значимые и заметно различные режимы работы для конечных пользователей, например, звуковой (от 9000 до 40000 движений в минуту) или ультразвуковой мотор (> 2400 движений в минуту).
В настоящих вариантах осуществления будет предполагаться, что привод 109 может производить колебательное движение, как показано стрелкой 111, для приведения в движение приспособления 108. В других вариантах осуществления приспособление 108 может получить возвратно-поступательное вращательное движение, как показано стрелками 115, 113. В других вариантах осуществления, приспособление 108 может включать в себя передачу, которая может изменять направление вывода электродвигателя 109. В других вариантах осуществления, предполагается, что головка щетки 114 может быть соединена с одним или несколькими держателями, которые могут быть соединены с электродвигателем 109 (например, непосредственно или с помощью любого подходящего соединения и/или системы передачи) и могут перемещаться относительно корпуса 117 приспособления для чистки.
Далее предусматривается, что в некоторых вариантах осуществления путь 179 потока текучей среды может соединять по текучей среде резервуар 173 для текучей среды и отверстие 177 приспособления 108. Гидравлический привод 175 (например, жидкостный насос) может работать под управлением контроллера 107 для управления потоком текучей среды из резервуара 173 вдоль пути 179 потока текучей среды, который должен быть исторгнут на отверстии 177. Таким образом, гидравлический привод 175 может работать для создания давления текучей среды. Путь 179 потока текучей среды может включать в себя проточный канал 171, расположенный между концом стержня 112 привода и отверстием 177. Путь 179 потока текучей среды может дополнительно включать в себя проточный канал в стержне 112 привода, который соединен по текучей среде с гидравлическим приводом 175. Гидравлический привод 175 может быть дополнительно соединен с резервуаром 173 для текучей среды, который может содержать требуемую текучую среду (например, воду, чистящую жидкость, абразивную жидкость, зубную пасту и т.д.) и может создавать давление в требуемой текучей среде таким образом, что она течет из резервуара 173 для текучей среды через отверстие 177 вдоль пути 179 потока текучей среды, под управлением контроллера и в соответствии с давлением или силой, приложенной к чувствительному к касанию датчику(ам) (104-x и/или 106) на корпусе 102. В некоторых вариантах осуществления может быть предоставлено некоторое количество резервуаров для текучей среды и отверстий приспособления, причем путь 179 потока текучей среды может включать в себя множество путей потока текучей среды, каждый из которых предоставляется между соответствующим резервуаром для текучей среды и соответствующим отверстием в приспособлении. Каждый из множества путей потока текучей среды может включать в себя гидравлический привод для создания давления в текучей среде вдоль соответствующего пути потока текучей среды под управлением контроллера 107.
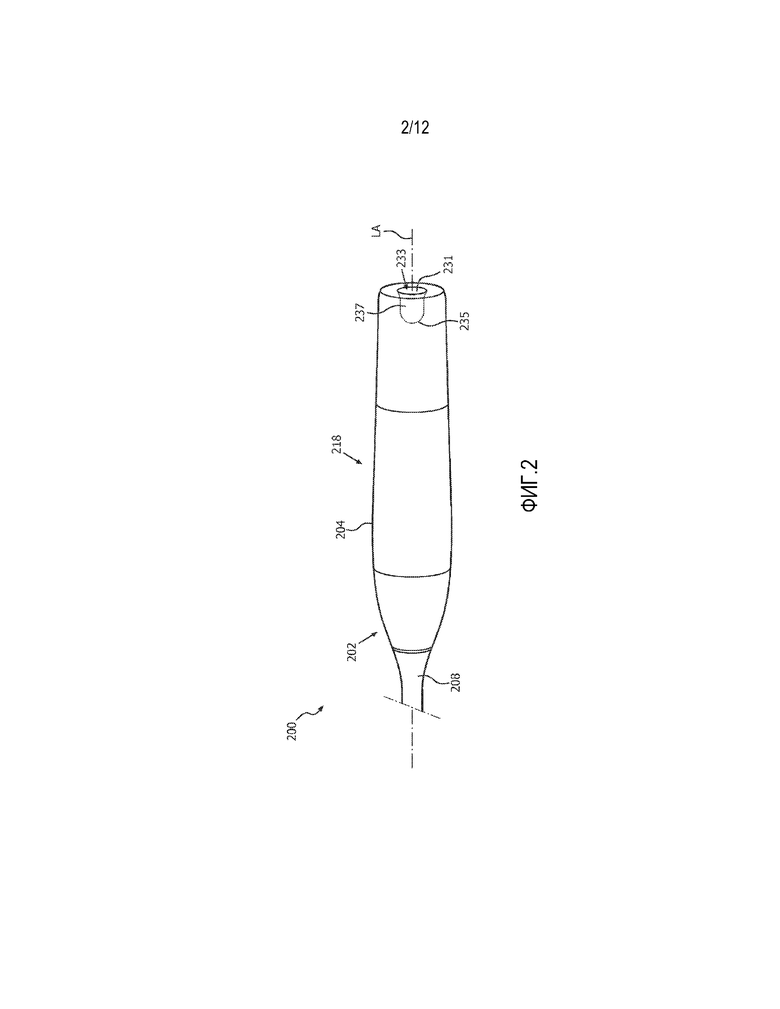
На ФИГ. 2 показан вид спереди в перспективе участка системы 200 зубной щетки с чувствительным к касанию корпусом 202 в соответствии с другими вариантами осуществления настоящей системы. Система 200 зубной щетки аналогична системе 100 зубной щетки и включает в себя корпус 202, чувствительное к касанию кольцо 204, и приспособление 208, которые аналогичны корпусу 102, чувствительному к касанию кольцу(ам) 104-x и приспособлению 108 системы 100 зубной щетки соответственно. Однако чувствительное к касанию кольцо 204 проходит вдоль длины участка 218 рукоятки корпуса 202 по основной или большей длине. Таким образом, чувствительное к касанию кольцо 204 может проходить вдоль большей длины продольной оси (LA) корпуса 202. Если желательно порт 231 зарядки/крепления может быть предоставлен для подсоединение корпуса 202 к зарядному устройству. Порт 231 зарядки/крепления может включать в себя отверстие 233, ведущее в полость 237, имеющую закрытый конец 235 напротив отверстия 233.
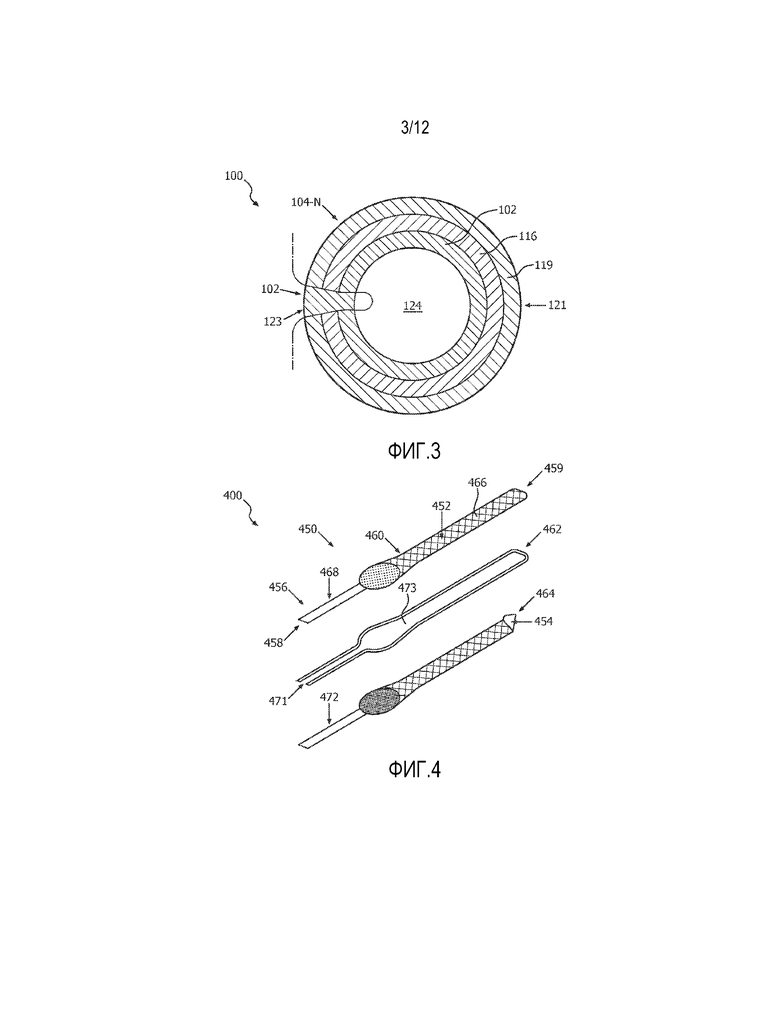
На ФИГ. 3 показан поперечный разрез участка системы 100 зубной щетки, выполненный по линиям 3-3, показанной на ФИГ. 1, в соответствии с вариантами осуществления настоящей системы. TS кольцо 104-N может включать в себя наружную оболочку 119 и датчик 116 давления. TS кольцо 104-N может опоясывать (или по существу опоясывать) участок 102 корпуса. Датчик 116 давления может включать в себя чувствительный к касанию датчик давления, который может воспринимать давление, приложенное к нему и формировать соответствующий сигнал давления, который может быть предоставлен контроллеру 107 (ФИГ. 1) для дальнейшей обработки. Этот сигнал может быть аналоговым или цифровым сигналом. Однако в вариантах осуществления настоящей системы будет предполагаться, что этот сигнал является аналоговым сигналом, указывающим сопротивление как функцию (линейную, и т.д.) давления, приложенного к датчику давления. Датчик 116 давления может использовать любой подходящий чувствительный к касанию принцип работы датчика. Например, датчик 116 давления может включать в себя импедансные датчики, такие как датчики касания резистивного и/или емкостного типа, и т.д. и может быть, если желательно, свернут в круглую или полукруглую форму с тем, чтобы воспринимать давление в цилиндрической области или т.п. Наружная поверхность датчика 116 давления может быть вровень с наружной поверхностью, окружающей участки корпуса 102. Например, TS кольцо 104-N (и/или другие TN кольца 104-x) может иметь внешнюю поверхность 121, которая может быть вровень или по существу вровень с наружной поверхностью 123 участка 102 корпуса. Эта внешняя поверхность 121 может быть дополнительно герметично скреплена с окружающими наружными участками корпуса 102 так, чтобы герметически закрыть датчик от загрязнений, таких как водя и/или инородные тела и вещества. Корпус 102 может включать в себя полость 124, выполненную с возможностью приема, по меньшей мере, части одного или нескольких зарядных устройств (например, индуктивного зарядного устройства), контроллера 107, привода 109 и стержня 112 привода, показанных на ФИГ. 1. Если желательно корпус 102 может включать в себя выемки или вырезные области вдоль его поверхности, чтобы принять один или несколько TS датчиков (106, 114-x, и т.д.).
В некоторых вариантах осуществления датчик 116 давления может включать в себя множество зон давления (например, матрицу зоны давления), каждая из которых может обнаружить давление, приложенное к ней. Таким образом, датчик 116 давления может формировать сигнал, указывающий зону(ы) давления, к которой приложено давление и, например, контроллер 107 может затем распознавать эти характеры распределения давления, используя любой подходящий способ. Затем, распознанные характеры распределения могут затем использоваться для идентификации пользователя или типа пользователя (например, большая рука=взрослый, маленькая рука=ребенок) и сконфигурировать работу (например, путем управления приводом 109) системы 100 зубной щетки в соответствии с распознанным пользователем или типом пользователя и т.д.
В некоторых вариантах осуществления предполагается, что датчик 116 давления может включать в себя емкостные датчики, которые могут обнаружить присутствие руки пользователя (например, с контактом или без) и формировать соответствующий сигнал, на основании расстояния между рукой пользователя и близлежащим участком датчика давления и/или силы, приложенной к датчику давления. Также предполагается, что датчик 116 давления может включать в себя датчики типа сенсорной панели и/или может включать в себя матрицу давления, которая, если желательно, может определять местоположение приложенного к ней давления и/или местоположение руки пользователя в непосредственной близости от датчика, и предоставлять эту информацию контроллеру 107 для дальнейшей обработки.
В других вариантах осуществления, зубная щетка 102 может быть выполнена таким образом, что один или несколько TS датчиков (например, 104-x и/или 106) может быть выполнен с возможностью функционирования в качестве переключателя «вкл.-выкл.», а также и в качестве чувствительного к касанию переключателя (например, переключателя, чувствительного к давлению). Например, после того, как зубная щетка включена (например, привод 109 приводится в движение контроллером 107) в результате приложения силы пользователем к одному или нескольким выбранным TS датчикам (например, 104-x и/или 106), контроллер 107 может определить величину силы, приложенной (например, аналоговое резистивное значение) к соответствующему TS датчику (например, 104-x и/или 106). Затем, основываясь на значении приложенной силы, контроллер 107 может определить функцию для применения и приведения в действие привода 109 в соответствии с определенной функцией. Таким образом, пользователь может держать место 118 хвата, включать зубную щетку путем вдавливания TS датчика 106 один раз и, затем, нажимать и удерживать TS датчик 106, используя требуемое давление и/или характер распределения. Затем контроллер 107 может читать значения силы из TS датчика 106 (которые связаны с силой, приложенной к нему) и выбрать требуемую для активации функцию. Функции могут включать в себя функции, такие как функция массажа, функция глубокой чистки, функция легкой чистки, функция новичка, функция обучения, функция пользователя ребенка, функция пользователя взрослого и т.д. Каждая из этих функции может иметь заранее определенную частоту, характер распределения, амплитуду и т.д. Тогда контроллер 107 может управлять приводом 109 для работы в соответствии с выбранной функцией. В следующих вариантах осуществления один или несколько TS датчиков (например, 104-x, 106) могут быть эргономично расположены на корпусе 102 и/или могут иметь эргономичную форму с тем чтобы повысить удобство пользователя и/или комфорт пользователя при удерживании и/или эксплуатации системы 100 зубной щетки.
На ФИГ. 4 показан развернутый вид в перспективе датчика давления типа чувствительного к силе (FS) резистора в соответствии с вариантами осуществления настоящей системы. Датчик 400 давления может включать в себя слоистый материал 450 из проводящего полимера, имеющий первую и вторую основные поверхности 452 и 454 соответственно, первые и вторые концы 458 и 459 соответственно, и может изменить сопротивление предсказуемым образом (например, линейно и т.д.) вслед за приложением силы к одной или нескольким из своих поверхностей, таких как первая и вторая основные поверхности 452 и 454, соответственно. Это сопротивление может быть переведено в значение силы (например, аналоговое значение или цифровое значение, если желательно) указывающее величину силы, приложенной к датчику 400 давления и может быть выведено на вывод 456 в сборе датчика 400 давления. Таким образом, по мере того как сила увеличивается, значение силы может соответственно возрастать (например, линейно и т.д.). Если желательно может быть предусмотрен аналого-цифровой преобразователь (АЦП) для того, чтобы преобразовать значение силы из аналоговой в цифровую форму. Датчик 400 давления может включать в себя множество полимерных слоев, таких как активный слой 460, определяющий активную область, промежуточный слой 462, такой как непроводящий слой пластика, и слой 464 проводящей пленки, образованный над гибкой подложкой 465, показанной на ФИГ. 6. Активный слой 460 может включать в себя проводящий слой 466 и электрический вывод 468 соединенный с ним. Промежуточный слой 462 может включать в себя отверстие или вентиляционное отверстие 471 в полости 473, который может работать для выравнивания давления между активным слоем 460 и слоем 464 проводящей пленки. Слой 464 проводящей пленки может включать в себя электрический вывод 472, соединенный с ним. Резистивное значение может считываться через электрические выводы 468 и 472, которые, если желательно, могут быть выполнены с возможностью присоединения контроллера.
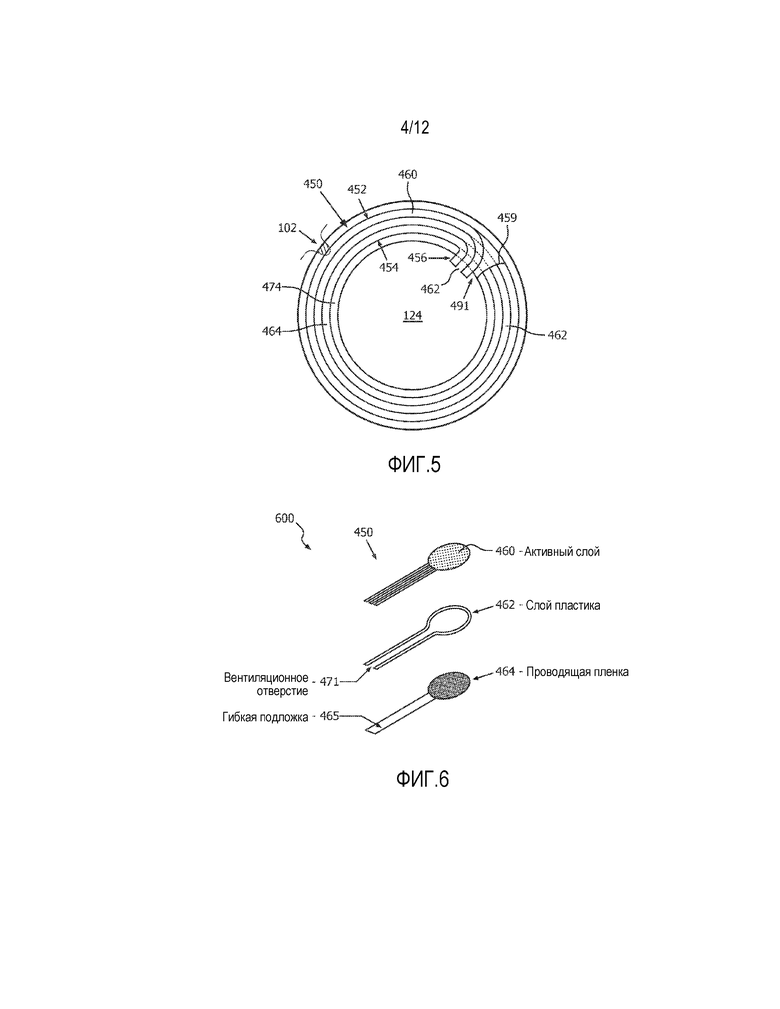
На ФИГ. 5 показан вид сбоку датчика давления резистивного типа, чувствительного к силе (FS), установленного в соответствии с вариантами осуществления настоящей системы 400. Опорный участок 474 может поддерживать резистивный датчик 400 давления FS (далее датчик 400 давления) и может быть сформирован как одно целое с корпусом 102 или может быть сформирован отдельно от корпуса 102 и, если желательно, вставлен внутрь полости 124 корпуса 102. Вывод 456 в сборе может, если желательно, быть загнут для прохождения через одно или несколько отверстий 491 в корпусе 102. Однако, в других вариантах осуществления, можно предусмотреть одно или несколько сквозных отверстий через корпус 102 и/или один или несколько слоев (например, 460, 462, 464) датчика 400 давления. Таким образом, вывод 456 в сборе может быть выполнен с возможностью приема одного или нескольких сквозных отверстий. Датчик 400 давления может иметь любой подходящий размер и/или форму. Например, в некоторых вариантах осуществления датчик 400 давления может образовывать, по меньшей мере, часть кольца, которая может проходить полностью или в значительной степени вокруг корпуса 102. Однако, в других вариантах осуществления, датчик давления может иметь еще и другие формы, такие как показаны на ФИГ. 6, на которой показан развернутый вид в перспективе датчика 600 давления типа воспринимающего силу резистора (далее датчик 600 давления) в соответствии с вариантами осуществления настоящей системы. Датчик 600 давления может быть выполнен аналогично датчику 400 давления, показанному на ФИГ. 4, и для ясности приведены аналогичные ссылочные позиции. Однако размер и/или форма могут быть разными. Например, датчик 600 давления можно использовать для TS датчика 106 кнопочного типа. В других вариантах осуществления, предполагается, что датчик 400 давления может образовать форму арки (если смотреть сбоку), которая может проходить вокруг корпуса 102.
На ФИГ. 7 показан вид сбоку в перспективе участка системы 100 зубной щетки, расположенного на зарядном устройстве 702 в соответствии с вариантами осуществления настоящей системы. Корпус 102 может быть чувствительным к касанию корпусом и быть выполненным с возможностью соединения с зарядным устройством 702 таким образом, чтобы беспроводным способом получать электрическую энергию, пригодную для зарядки и/или работы.
Теперь будет обсужден способ работы устройств (OHD) для ухода за полостью рта (OHD) (таких как система 100 зубной щетки и т.д.), работающих в соответствии с вариантами осуществления настоящей системы. После обнаружения того, что пользователь сдавил участок сжатия OHD, контроллер может определить величину (например, значение величины) силы и/или характер распределения силы (например, характер распределения сдавливаний) и управлять OHD для осуществления одной или нескольких функций, связанных с определенной величиной силы и/или характером распределения силы. Характер распределения может быть обнаружен, когда различные силы прикладываются в течение интервала времени, такого как три секунды. Однако, можно использовать другие интервалы времени. Таблица 1 иллюстрирует таблицу выбора функции в соответствии с вариантами осуществления настоящей системы.
Различные надавливающие действия, такие как надавливающие действия 1-3 могут включать в себя сдавливание, поддерживание силы сдавливания, и отпускание и ослабление силы/сжатия на месте 118 хвата (или ее участках) один раз, и зависимости от того, насколько сильно пользователь сдавил место 118 хвата, определяется количество высвобождаемого вещества. Для того, чтобы отличить надавливающие действия от других действий, таких как схватывание места 118 хвата или непрерывное сдавливание для того, чтобы изменить рабочую частоту, например, желаемое действие, такое как высвобождение вещества (например, зубной пасты или очищающего средства) активируется и выполняется только, если события сдавливания и высвобождения случились в заранее определенном временном окне или интервале, например, в пределах от 0,1 до 0,2 секунды. Таким образом, надавливающее действие может быть определено как ужесточение и отпускание сжатия, которое произошло в пределах заранее установленного временного окна или интервала (например, приблизительно от 0,1 до 0,2 секунды), где временное окно определяется двумя значениями: минимальным временем (например, 0,1 секунды) чтобы избежать ложных срабатываний от неконтролируемого сдавливания, и максимальным временем (например, 0,2 секунды) чтобы отличить надавливающее действие от непрерывного надавливающего действия для изменения рабочей частоты, если место 118 хвата сдавливается в течение более 0,2 секунд, но менее чем 3 секунды, или активации второго типа щетинок, если место 118 хвата сдавливается в течение более 3 секунд, например.
Таким образом, сила и/или давление используются для выбора и активации различных функций. Например, тремя последовательными сдавливаниями можно выбрать и активировать функцию массажа, а двумя сдавливаниями можно выбрать и активировать обычную функцию чистки. Кроме того, любые требуемые комбинации функций (например, функции массажа, функции глубокой чистки, функции легкой чистки, функции новичка, функции обучения, функции пользователя ребенка, функции пользователя взрослого и т.д.) также могут быть выбраны и активированы в ответ на заранее определенную частоту, характер распределения, амплитуду, и т.д., даже в середине использования, когда выполняются другие функции. Например, во время нормальной очистки, если пользователь три раза быстро сдавливал и отпускал, то функция массажа начинается в середине использования до тех пор, пока другие три сдавливания не остановят массаж и не возвратят систему зубной щетки в обычный режим чистки или функцию, которая была до активации функции массажа.
Выбор и/или активация требуемой функции(й) также может быть достигнута постукиванием головки щетки по зубам, если датчик обнаруживает постукивание головки. Такой датчик может быть аналогичен описанным датчикам силы и/или другим датчикам, таким как, по меньшей мере, один из следующих: светочувствительный датчик, датчик влажности и акселерометр. Как уже говорилось, эти датчики могут определять число и/или интенсивность постукиваний или силы постукиваний головки в полости рта, и в ответ выбираются и/или активируются различные функции. Например, два постукивания в полости рта могут быть обнаружены с помощью одного из этих датчиков, и в ответ может быть активирована функция массажа. Эти функции могут включать в себя функции, такие как функция массажа, функция глубокой чистки, функция легкой чистки, функция новичка, функция обучения, функция пользователя ребенка, функция пользователя взрослого и т.д. Каждая из этих функции может иметь заранее определенную частоту, характер распределения, амплитуду и т.д., и т.д.
С помощью интерфейсов, основанных на силе, пользователь обычно имеет возможность производить и запоминать от четырех до шести уровней давления/силы (по меньшей мере, пальцами), где увеличение числа уровней давления свыше шести уровней может привести к увеличению частоты ошибок. Кроме того, следует отметить, что, так как человеческое восприятие силы сжатия не является линейным, диапазон каждого различимого уровня силы может не обязательно иметь одинаковую величину. Например, диапазон силы, которую данная система может распознать как «легкое сжатие» меньше, чем диапазон силы того, что система может распознавать как «сильное сжатие».
Для уменьшения ложных срабатываний, прежде чем активировать нужную функцию, должно сначала пройти минимальное время активации. Таким образом, только тогда, когда сила обнаруживается и сохраняется в пределах заданного диапазона, такого как 10-20 миллисекунд, только тогда активируется нужная функция. Таким образом, задержка (например, 10-20 миллисекунд) предоставляется перед любыми операциями активации. Кроме того, так как обычно люди в большинстве случаев не в состоянии увеличивать давление или сдавливание достаточно постепенно, выполняется сглаживание обнаруженной силы/давления на место 118 хвата. Таким образом, если сила или сдавливание сохраняется, как например, сильное или более сильное сжатие, то реакция (т.е., увеличение рабочей частоты) предоставляется с некоторой задержкой (до активации) и сглаживанием. Рабочая частота может изменяться постепенно или дискретно.
Система 100 зубной щетки может быть отключена, если не обнаружения никакая сила или обнаружена сила ниже определенного порогового значения. Кроме того, для функции дезактивация при сжатии может быть задана кнопка выключения или участок, чувствительный к давлению сжатия. Альтернативно или дополнительно, для определения того, следует ли деактивировать устройство, используется другая информация по датчикам, таким как, например, акселерометр или светочувствительный датчик в ручке для более надежного определения того, держит ли пользователь устройство.
В других вариантах осуществления, сдавливающее действие может преобразовываться для активации приводов в течение требуемого периода времени (например, 2 секунды и т.д.) в который может высвобождаться чистящее вещество, такое как одно или несколько из следующего: зубная паста, ополаскиватель для полости рта и т.д., или может краткосрочно создаваться вакуум для удаления инородных тел и веществ из зубов и т.д. Различные надавливающие действия (например, надавливающие действия 1, 2 и/или 3) могут быть выбраны пользователем, чтобы отображаться на надавливающее действие, или надавливающие действия могут различаться друг от друга по типу надавливания (например, продолжительное, среднее или короткое может преобразовываться в требуемое надавливающие действие, такое как надавливающие действие 1, надавливающие действие 2 и надавливающие действие 3, соответственно). В некоторых вариантах осуществления определено только одно надавливающее действие и это надавливающее действие может преобразовываться в требуемую функцию (например, активировать устройство для чистки межзубных промежутков и т.д.). В других вариантах осуществления, сила надавливающего действия может преобразовываться в скорость зубной щетки, как будет описано ниже.
В некоторых вариантах осуществления поток операций конечного автомата также может использоваться для определения функции, которая будет применяться. Например, в некоторых вариантах осуществления после того, как первый привод первоначально приводится в действие (например, включается) для передачи силы и/или движения приспособлению при стандартной настройке (например, 5000 мазков кистью в минуту (BSM)), система может определить, как велика сила, прикладываемая к чувствительному к касанию датчику, и затем определить соответствующую функцию, которая будет применяться в приводе. После этого контроллер может управлять работой привода в соответствии с соответствующей определенной функцией.
Варианты осуществления, показанные выше в Таблице 1, являются только иллюстративными и предусмотрены многие другие параметры (например, для режимов чистки и т.д.). Например, в других вариантах осуществления, одно или несколько из следующего: сила, характер распределения и соответствующие функции режима очистки могут быть установлены системой и/или пользователем. В других вариантах осуществления, пользователь может быть идентифицирован (например, с помощью принадлежащего процессу приложения для анализа сжатия) и может использоваться соответствующая карта функций для требуемого пользователя. Таким образом, например, процесс может активировать различные функции для первого пользователя, например, родителя, и второго пользователя, например, ребенка, для которого процесс может активировать функции для детей, такие как действие щетки с низкой скоростью (частотой), вывод зубной пасты для детей и т.д.
В некоторых вариантах осуществления система может включать в себя приложение для пользователя для установки/переустановки таблицы выбора функции, использующее систему на основе меню, выполняемое на любом подходящем устройстве, таком как дисплей системы или дисплей любого другого подключаемого устройства пользователя, например, телефона пользователя и т.д. Таким образом, система может осуществлять связь с устройством пользователя, используя любой подходящий способ связи, такие как способы проводной и/или беспроволочной связи, например, Bluetooth™ и т.д.
В других вариантах осуществления взаимодействие пользователя (например, посредством приложенной силы и/или характера распределения) можно использовать для выбора режима жесткости щетины, в котором жесткость чистящих щетинок может регулироваться, например, регулируя выдвижение требуемых щетинок (например, жесткими щетинками в настоящих вариантах осуществления), когда пользователь сжимает место хвата с требуемой силой и/или характером распределения. Например, если определено, что пользователь сильно сдавливает место хвата в течение более 10 секунд, группа жестких (твердых) щетинок может быть выдвинута из головки щетки за пределы пространства группы обычных щетинок (например, мягких щетинок), которые обычно выдвигаются. Таким образом, варианты осуществления настоящей системы могут предложить способы взаимодействия с пользователем для изменения жесткости щетинок головки щетки системы. Несмотря на то, пользователи могут предпочесть зубную щетку жесткими щетинками из-за веры в то, что они на самом деле чистят зубы лучше, чем мягкие щетинки, эти жесткие щетинки могут в перспективе привести к повреждению эмали зубов пользователя или области десен пользователя, если используются слишком долго или сверх меры. Таким образом, варианты осуществления настоящей системы могут регулировать выдвижение жестких щетинок с тем, чтобы вовлекать жесткие щетинки только по запросу посредством взаимодействия с пользователем. Таким образом, пользователь может взаимодействовать с ORD для изменения жесткости щетинок головки щетки, когда пользователи желают это сделать, например, когда пользователь чувствует, что жесткие щетинки были бы желательны, например, для того, чтобы удалить некоторые трудноудаляемые инородные тела и вещества, зубной налет и т.д.
Отметим далее, что варианты осуществления настоящей системы могут осуществить способ распознавания места хвата, который можно использовать чтобы гарантировать, что настройки устройства не изменяются, когда пользователь регулирует место хвата на ручке во время использования. Таким образом, например, если пользователь быстро изменяет положение места хвата, устройство может игнорировать любые изменения в обнаружении силы сжатия и/или характеров распределения в течение определенного интервала времени.
На ФИГ. 8A показан вид сбоку в перспективе с частичным вырезом участка системы 800 зубной щетки с чувствительным к касанию (TS) корпусом 802 в соответствии с вариантами осуществления настоящей системы. TS корпус 870 может иметь первый конец 820 и второй конец 822, участок сжатия/место 818 хвата, расположенное между первым и вторым концами 820, 822, и другие признаки, аналогичные тем, которые показаны на ФИГ. 1, такие как чувствительные к касанию (TS) кольца 104-1 до 104-N (как правило 104-x) и/или TS датчик 106 кнопочного типа 106, показанный на ФИГ. 1, но исключенный из ФИГ. 8A, 8B для большей наглядности. Однако приспособление 808 TS корпуса 870 может включать в себя регулируемые щетинки в отличие от фиксированных щетинок приспособления 108. Более конкретно, приспособление 808 может включать в себя головку 814 щетки, и может быть соединено с TS корпусом 870. Приспособление 808 может получить двигательную силу (например, вращательную силу, вибрационную силу и т.д.) от любого подходящего элемента для передачи силы, такого как стержень 812 привода. Двигательная сила может быть произведена с помощью любого подходящего источника, такого как электронный привод (ACT) 109, соединенного с концом стержня 812 привода, аналогично описанному, например, в связи с ФИГ. 1.
Головка 814 щетки может включать в себя одну или несколько групп щетинок, по меньшей мере, одна из которых регулируется по выдвижению. Например, первая группа щетинок 850 может включать в себя щетинки первого типа (например, мягкие щетинки), а вторая группа щетинок 852 может включать в себя щетинки второго типа (например, жесткие щетинки). Второй группой щетинок 852 можно управлять таким образом, чтобы регулировать ее выдвижение относительно наружной части головки 814 щетки. Приводной механизм 862 щетинок может регулировать положение управляемых щетинок (например, второй группы щетинок 852 в настоящем варианте осуществления) под управлением контроллера (CONT) 807 с помощью сигнала, передаваемого посредством линий 860 управления, таким образом, чтобы расположить управляемые щетинки в нормальное положении (например, втянутое положением) во время обычного использования и в выдвинутое положение, когда желательна активация щетинок второго типа (например, см. Таблицу 1 для способов активации). Приводной механизм 862 щетинок может включать в себя любой подходящий механизм, такой как привод 866 из электроактивного (ионного) полимера (ЭАП), который изменяет свою форму и/или жесткость, при помещении под низкое напряжение, например, 1-2 вольта, предоставляемого контроллером 807 по линии 860 управления. Привод из ЭАП 866 может включать в себя пассивный материал и, таким образом, может быть встроен в полость 809 приспособления 808 с минимальным количеством или без дополнительной электроники или механизированного механизма. Электронный соединитель 864 может соединить контроллер 807 (расположенный в полости TS корпуса 870) с приводом 866 из ЭАП посредством, например, линии 860 управления, так, что эта мощность (например, напряжение, такое как управляющее напряжение) может подаваться на привод 866 из ЭАП, как напряжение для активирования привода 866 из ЭАП, если желательно.
На ФИГ. 8B показан вид сбоку в перспективе с частичным вырезом участка системы 800 зубной щетки с напряжением, поданным на привод 866 из ЭАП в соответствии с вариантами осуществления настоящей системы. Так как управляющее напряжение подается на привод 866 из ЭАП, привод 866 из ЭАП будет изгибаться, чтобы приложить силу, которая может заставить управляемые щетинки (например, щетинки второй группы 852) еще выдвинуться из приспособления 808, с тем, чтобы иметь возможность контактировать с требуемой поверхностью (например, зубом пользователя) во время работы. В соответствии с другими вариантами осуществления щетинки второй группы 852 могут включать в себя, по меньшей мере, один резиновый скребок. В других вариантах осуществления могут использоваться другие подходящие механизмы для регулирования положения резиновых скребков и/или щетинок.
На ФИГ. 8C показан вид в поперечном разрезе участка системы 800 зубной щетки, выполненный по линиям 8C-8C, показанным на ФИГ. 8A, в соответствии с вариантами осуществления настоящей системы. Щетинки второй группы 852 могут быть соединены с носителем 867, который, в свою очередь, соединен с приводом 866 из ЭАП, и расположен в полости 809 приспособления 808. По меньшей мере, часть полости 809 может быть определена одной или несколькими внутренними стенками 875 кромки, которые могут определять ширину (WC) полости 809. Аналогичным образом привод 866 из ЭАП и/или носитель 867 могут иметь противолежащие боковые кромки 890, которые могут определять ширину (WEAP) привода 866 из ЭАП и/или носителя 867. Одна или несколько внутренних стенок 875 кромки может быть выполнена таким образом, что WC может быть немного больше, чем WEAP, так что можно управлять поперечным отклонением привода 866 из ЭАП и/или носителя 867 относительно полости 809 приспособления 808 (например, контактом противолежащих боковых кромок 890 с близлежащими одной или несколькими внутренними стенками 875 кромки) когда приспособление 808 получает (например, вращательную силу, вибрационную силу и т.д.) от любого подходящего элемента для передачи силы, такого как стержень 812 привода во время использования.
На ФИГ. 8D показан вид в поперечном разрезе участка системы 800 зубной щетки, выполненный по линиям 8D-8D, показанным на ФИГ. 8C в соответствии с вариантами осуществления настоящей системы. Приспособление 808 может включать в себя корпус 870, имеющий одну или несколько боковых стенок, которые могут определять, по меньшей мере, часть боковой поверхности полости 809 и могут включать в себя одно или несколько отверстий 872, через которые могут проходить щетинки второй группы 852. Например, полость 809 может включать в себя внутреннюю боковую стенку 874, которая может быть выполнена с возможностью контакта с соседним участком носителя 867, когда привод 866 из ЭАП изгибается управляющим напряжением, как показано пунктирными линиями. Привод 866 из ЭАП может иметь проксимальные и дистальные концы 880 и 878, соответственно, и может быть соединен на проксимальном конце 880 с корпусом 870 приспособления 808 так, чтобы проксимальный конец 880 может оставаться неподвижным по отношению к корпусу 870 при активации. Таким образом, когда управляющее напряжение (например, когда привод из ЭАП активируется) подается на привод 866 из ЭАП, привод 866 из ЭАП будет изгибаться и дистальный конец 878 привода 866 из ЭАП может отклоняться в выдвинутое положение, как показано пунктирными линиями. Таким образом, управляемые щетинки (например, щетинки второй группы 852), которые соединены с приводами 866 из ЭАП через носитель 867, будут проталкиваться через одно или несколько отверстий 872 и еще выдвигаются из приспособления 808 с тем, чтобы иметь возможность контактировать с требуемой поверхностью (например, зубом пользователя) во время работы. Это положение может быть обозначено как выдвинутое положение. Когда управляющее напряжение больше не подается на привод 866 из ЭАП, привод 866 из ЭАП возобновляет свою нормальную форму, как показано сплошными линиями и управляемые щетинки (например, щетинки второй группы 852), соединенные с ним, втягиваются из своего выдвинутого положения, так что контакт с требуемой поверхностью (например, зубом пользователя) во время работы может быть уменьшен или полностью устранен. Это положение может быть обозначено как втянутое или нормальное положение. Таким образом, например, если щетинки второй группы 852 являются жесткими щетинками, контракт между этими щетинками и требуемой поверхностью (например, зубом пользователя) может быть уменьшен или полностью устранен, если щетинки второй группы 852 не выдвинуты во втянутом положении. Первая группа щетинок 850 может быть соединена с корпусом 870 приспособления 808 с помощью любого подходящего способа. Например, проксимальные концы 886 первой группы щетинок 850 могут быть соединены с носителем 884 первой группы, который может быть соединен с корпусом 870 приспособления 808. Таким образом, первая групп щетинок 850 может проходить через отверстия 888, которые могут быть расположены в корпусе 870 приспособления 808. Однако, в других вариантах осуществления, проксимальные концы первой группы щетинок 850 могут быть соединены непосредственно с корпусом 870 приспособления 808. Выдвижение первой группы щетинок 850 может оставаться фиксированным вне зависимости от того, выдвинуты или втянуты щетинки второй группы 852. Однако, в других вариантах осуществления, по меньшей мере, некоторые щетинки первой группы щетинок 850 могут управляться, чтобы попеременно выдвигать или втягивать аналогично второй группе щетинок 852.
В соответствии с вариантами осуществления настоящей системы, система, включающая OHD, имеющее корпус с местом хвата, и зубную щетку, соединенную с корпусом. Место хвата может включать в себя и датчик давления, такой как датчик давления типа чувствительного к силе (FS) резистора. Как только зубная щетка включается, контроллер может определять силу, прилагаемую к датчику давления на основании вывода датчика давления (например, аналоговое значение сопротивления в настоящих вариантах осуществления). Сигнал силы, выводимый датчиком давления может быть монотонной функцией области и/или давления, приложенного к датчику давления. Кроме того, может быть предоставлено и сохраняться в памяти системы соответствие между силой, приложенной к датчику давления (например, как определено на основе выходного сигнала датчика давления) и требуемой скоростью (например, рабочей частотой) работы (например, вибрации) присоединенного приспособления для чистки, такого как зубная щетка (например, в мазках кистью в минуту (BSM)).
Соответствие может быть установлено/переустановлено пользователем с использованием любого подходящего способа, такого как процесс обучения, осуществляемого в соответствии с вариантами осуществления настоящей системы. Например, во время процесса обучения, пользователь может держать место хвата OHD свободно, а затем постепенно увеличивать силу, которую он прикладывает к месту хвата, надавливать на место хвата до тех пор, пока он воздействует сильно, но комфортно. Датчики давления на месте хвата будут воспринимать эту силу и форму, соответствующую информации датчика. Затем эти показания датчика могут быть преобразованы в единицы силы (например, в ньютоны (N)), которые преобразуются в BSM. Эти преобразованные значения могут затем быть сохранены в памяти системы для последующего использования в соответствии с настройками пользователя. Преобразованные значения BSM, могут быть связаны с выходными значениями от датчиков давления прямо (например, непрерывно, на основе взаимно-однозначного соответствия или линейно) или дискретно (например, на дискретной основе) как будет обсуждаться ниже. В других вариантах осуществления, сигналы, выводимые датчиком(ами) давления преобразуются в BSM как указано выше без преобразования в единицы силы. Например, на ФИГ. 9A показан график 900A, который иллюстрирует прямую или непрерывную (например, взаимно-однозначную) зависимость приложенной к датчику(ам) давления силы и значениями BSM в соответствии с вариантами осуществления настоящей системы; и на ФИГ. 9B показан график 900B, который иллюстрирует дискретную зависимость между силой, приложенной к датчику(ам) давления и значениями BSM в соответствии с вариантами осуществления настоящей системы. Таким образом, как показано на ФИГ. 9A, BSM может быть преобразовано непосредственно в силу, приложенную к датчикам давления места хвата на основе взаимно-однозначного соответствия. Таким образом, BSM может быть прямо пропорционально силе, приложенной к месту хвата. В некоторых вариантах осуществления взаимно-однозначное отображение не будет применяться до тех пор, пока воспринятая сила не превышает первый порог BSM, 1.
В других вариантах осуществления, как показано на ФИГ. 9B, BSM может быть преобразовано в FSM дискретно. Таким образом, контроллер может регулировать BSM на дискретных интервалах в соответствии с диапазоном давлений (например, «свободном», «обычным» и «сильным»), оказываемых пользователем на место хвата, как обнаружено датчиками давления. Например, в некоторых вариантах осуществления информация (SI) датчика, относящаяся к силе, приложенной пользователем, может быть получена от TS датчика и может сравниваться со множеством пороговых значений (например, Thresh1, Thresh2, Thresh3 и Thresh 4. Если определено, что: Thresh1<=SI<Thresh2, контроллер может выбрать первое значение BSM (например, BSM1). Однако, если определено, что: Thresh2<=SI<Thresh3, контроллер может выбрать второе значение BSM (например, BSM2). Аналогично, если определено, что: Thresh3<=SI<Thresh4, может выбрать третье значение BSM (например, BSM3). Кроме того, если определено, что: Thresh4<=SI<Thresh5, контроллер может выбрать четвертое значение BSM (например, BSM4). Если желательно, соответствия могут сохраняться в памяти системы в любой подходящей форме, такой как функциональная таблица (например, Таблица 1).
Во время работы OHD, контроллер может выполнять рабочие действия, такие как: определение силы, приложенной к месту хвата OHD пользователем, и определение значения для BSM, на основании определенной силы. Значения для BSM, могут быть получены из памяти системы (например, с помощью поиска по таблице). Затем, контроллер может управлять приводом в соответствии с определенным значением для BSM. Привод может затем привести головку щетки к (или примерно к) определенному значению для BSM.
В соответствии с другими вариантами осуществления настоящей системы, предлагается OHD, такое как устройство для чистки межзубных промежутков, работающее в соответствии с вариантами осуществления настоящей системы. Одно такое устройство для чистки межзубных промежутков известно, как, например, устройство для чистки межзубных промежутков (IDCD) Philips™ AirFloss™, которое если желательно выдает струю жидкости и/или газа и может управляться, чтобы работать в соответствии с вариантами осуществления настоящей системы. Струя жидкости может включать в себя воду и/или одну или несколько чистящих жидкостей, таких как ополаскиватель для полости и рта, фтористый ополаскиватель, абразив и т.д.
Струя жидкости может быть активирована в соответствии с вариантами осуществления настоящей системы на основании силы, приложенной к чувствительному к силе (FS) датчику давления (далее по тексту датчик давления), такому, как показанный в вариантах осуществления, показанных на ФИГ. 1-2. Таким образом, датчик давления может быть интегрирован в место хвата устройства типа Airfloss (например, IDCD) и может воспринимать силу, приложенную к нему пользователем, и предоставлять показание этой силы (например, как резистивное значение или другое показание датчика) контроллеру. Контроллер затем может определить силу, приложенную к датчику давления в месте хвата, характер распределения в месте хвата и/или характер распределения приложения силы по времени. Затем контроллер может определить надлежащую функцию (например, выбранную из множества функций) для применения в соответствии с определенной приложенной силой, характером распределения сдавливания и/или характером распределения давления по времени в соответствии с системой и/или настройками пользователя, используя, например, поиск по таблице. Затем контроллер может активировать один или несколько приводов в соответствии с определенной функцией.
Таким образом, один или несколько приводов могут подавать насосом выбранную жидкость и/или газ в соответствии с определенной функцией к приспособлению IDCD, такому как чистящая головка, которое затем может выводить жидкость и/или газ из одного или нескольких отверстий чистящей головки. Таким образом, жидкость и/или газ могут быть выведены чистящей головкой в соответствии с функциями на основании определенного давления, характером распределения сдавливания и/или характером распределения давления по времени. Это может быть аналогично варианту осуществления, показанному на ФИГ. 1 и 2 и выход датчика от датчиков давления может быть считан контроллером. Контроллер может затем сравнить значение информации датчика от датчиков давления с пороговым значением давления и, если будет определено, что значение информации датчика больше, чем пороговое значение (например, указывающее на надавливающее действие пользователя), контроллер может управлять приводом IDCD для подачи под давлением жидкости к чистящей головке.
Альтернативно, размер отверстий в чистящей головке можно изменять, чтобы изменять скорость выхода жидкости и/или газа, меньшее отверстие ведет к более быстрому выходу (при условии, что давление от насоса такое же). Привод или мотор может предоставляться для того, чтобы открывать и закрывать отверстия в чистящих головках, выборочно или вместе, как например путем перемещения крышки над отверстиями в чистящей головке для того, чтобы открывать и закрывать отверстия, изменяя таким образом скорость выхода жидкости и/или газа. Таким образом, жидкость и/или газ могут быть выведены чистящей головкой в виде одной или нескольких струй жидкости/газа, содержащих микрокапельки воды. Однако если определено, что значение информации датчика меньше или равно пороговому значению, контроллер может не предпринимать никаких действий, если желательно.
На ФИГ. 10 показан вид спереди в перспективе участка IDCD системы 1000 (в дальнейшем для ясности система 1000) с чувствительным к касанию корпусом 1002 в соответствии с вариантами осуществления настоящей системы. IDCD система 1000 может быть аналогична системе 100 зубной щетки, показанной на ФИГ. 1, и может включать в себя приспособление 1008 для чистки, соединенное с корпусом 1002. Чувствительный к касанию корпус 1002 может иметь первый и второй концы 1020 и 1022, соответственно, место хвата 1018, расположенное между первым и вторым концами 1020 и 1022, соответственно, и один или несколько чувствительных к касанию датчиков, расположенных на месте хвата. Чувствительные к касанию (TS) датчики могут включать в себя любую подходящую чувствительную к касанию воспринимающую силу компоновку, такую как чувствительные к касанию кольца 1004-1 до 1004-N (как правило 1004-x) и/или круговой TS датчик 1006. Чувствительные к касанию датчики могут быть аналогичны в работе TS датчикам 104-x и 106, описанным в отношении ФИГ. 1, и могут передавать информацию, относящуюся к силе, приложенную к ним, контроллеру системы, такому как контроллер 1007, который может быть процессором, таким как микропроцессор μp.
Что касается приспособления 1008, это приспособление может включать в себя чистящую головку 1014, такую как чистящая головка типа AirFloss™, сопло для жидкости/ воды, или подобное, выполненное с возможностью испускания жидкости и/или газа в виде струи (например, струи воды и/или воздуха) с заданной силой, по меньшей мере, из одного отверстия 1009 чистящей головки 1014. Отверстие 1009 может соединяться по потоку (например, через трубку 1012) с одним или несколькими приводами, такими как один или несколько насосов, расположенных в корпусе, и которые могут создавать давление жидкости(ях) в и/или газе под управлением контроллера 1007. Насосы могут включать в себя любой подходящий насос, такой как роторные, возвратные, пьезо насосы или подобные. Один или несколько насосов могут принимать жидкость из любого подходящего источника, такого как шланг или резервуар (Res) 1091, соединенного с ними по потоку. В некоторых вариантах осуществления чистящая головка 1014 может включать в себя одну или несколько щеток. Одна или несколько щеток кисти могут выдвигаться или втягиваться под управлением контроллера и в соответствии с давлением, оказываемым на место 1018 хвата, воспринимаемого датчиками давления (1004-x и/или 1006). В некоторых вариантах осуществления приспособление может включать в себя головку щетки, если желательно. Кроме того, привод для приведения в движение приспособления может в этом случае быть выполнен так, чтобы приспособление могло двигаться в заданном направлении(ях) и/или с требуемой частотой (например, в мазках кистью в минуту (BSM)).
На ФИГ. 11 показан вид спереди в перспективе участка IDCD системы 1100 с чувствительным к касанию (TS) корпусом 1102 в соответствии с другими вариантами осуществления настоящей системы. IDCD система 1100 аналогична IDCD системе 1000 и включает в себя корпус 1102, чувствительное к касанию кольцо 1104, и приспособление 1108, которое аналогично корпусу 1002, чувствительное к касанию кольцо 1004 (или 1004-x) и приспособление 1008, соответственно IDCD системе 1000. Однако чувствительное к касанию кольцо 1104 проходит вдоль основной длины участка 1118 рукоятки корпуса 1102. Таким образом, чувствительное к касанию кольцо 1104 может проходить вдоль основной длины продольной оси (LA) корпуса 1102.
Способ работы OHD теперь будет обсуждаться со ссылкой на ФИГ. 12, который представляет собой схему последовательности операций, иллюстрирующую процесс 1200, исполняемый системой в соответствии с вариантами осуществления настоящей системы. Процесс 1200 могут быть выполнен с использованием одного или нескольких контроллеров, процессоры или компьютеры обмениваются данными по сети и могут, например, получать информацию, как контроллер 107, показанный на ФИГ. 1, от одного или нескольких блоков памяти и/или хранить информацию в них, причем они могут быть локальными и/или удалены друг от друга и соединены, например, с процессoром или контроллером 107. Процесс 1200 может включать в себя один или несколько из следующих операций. Кроме того, одна или несколько из этих операций могут быть объединены и/или разделены на подоперации, если желательно. Кроме того, один или несколько из актов могут быть пропущены, в зависимости от настроек. Во время работы процесс может начаться с акта 1201, а затем перейти к акту 1203.
Во время акта 1203 процесс может получать информацию датчика, по меньшей мере, от одного воспринимающего силу (FS) датчик участка места хвата участка корпуса. Информация датчика может включать в себя аналоговую и/или цифровую информацию, относящуюся, по меньшей мере, к одному значению силы, приложенной, по меньшей мере, к одному FS датчику, например, пользователем. Например, в некоторых вариантах осуществления the FS информация может включать в себя информацию, относящуюся к области или зоне, к которой применяется сила. В некоторых вариантах осуществления FS датчик является FS резистивным датчиком, который может выводить сопротивление (значение(я)) в качестве информации датчика. Сопротивление может соответствовать силе, приложенной к FS датчику. Однако, в других вариантах осуществления, предполагается, что FS датчик является FS емкостным датчиком, который может выводить емкость (значение(я)) в качестве информации датчика. Емкость может соответствовать силе, приложенной к FS датчику. После завершения операции 1203, процесс может продолжиться до операции 1205.
Во время акта 1205 процесс, например, процессор или контроллер 107, может определить и/или выбрать функцию для применения в соответствии с информацией датчика. Таким образом, процесс может сопоставить информацию датчика с информацией выбора функции, хранящейся в памяти системы, такой, которая может храниться в таблице выбора функции. В некоторых вариантах осуществления информация выбора функции может включать в себя информацию, связанную с одним или несколькими порогами и/или характерами распределения, с которыми можно сравнивать информацию с датчиков и, может включать в себя соответствующие функции для применения (например, в приводах, переключателях и т.д.) на основании результатов сравнения(ий). После того, как процессор определяет функцию для применения, соответствующие приводы управляются соответствующим образом, например, для управления мазком кисти управляется первый привод; для управления потоком текучей среды, управляется второй привод (например, насос); для управления выдвижением щетинок, управляется третий привод (например, привод из ЭАП. После завершения акта 1205, может продолжиться до акта 1207.
Во время операции 1207, процесс, например, процессор или контроллер 107, может применить определенные/выбранные функции. Таким образом, процессор может управлять или в других случаях вести один или несколько (выбранных) приводов в соответствии с выбранной функцией(ями). После завершения операции 1207, процессор может повторить операцию 1203 таким образом, чтобы постоянно управлять OHD в соответствии с вводом пользователя или может закончиться, если желательно.
Дополнительные и/или отличные рабочие операции могут быть выполнены процессором или контроллером 107 при управлении работой системы 800 зубной щетки, показанной на ФИГ. 8A, 8B, имеющей две группы щетинок 850, 852. В частности, во время операции 1207, контроллер 107 управляет первым приводом в соответствии с выбранной функцией, если первый привод такой же, как привод (109) описанный со ссылкой на ФИГ. 1, 8A, 8B. Кроме того, во время операции 1210, контроллер 107 получает дополнительную информацию датчика, сгенерированную чувствительным к касанию датчиком, дополнительную информацию датчика, соответствующую силе, приложенной пользователем к поверхности чувствительному к касанию датчику во второй раз. Затем во время операции 1212, контроллер 107 определяет, больше или равна вторая информация датчика пороговому значению; и затем во время операции 1214, контроллер 107 активирует второй привод 862 для выдвижения первой либо второй щетки 850, 852 относительно первой либо второй щетки 850, 852, если определяющим актом определено, что вторая информация датчика больше или равна пороговому значению.
На ФИГ. 13 показан участок системы 1300 в соответствии с вариантами осуществления настоящей системы. Например, участок настоящей системы 1300 может включать в себя процессор 1310 (например, контроллер), функционально соединенный с памятью 1320, пользовательский интерфейс (UI) 1330, и участок 1370 для ввода данных пользователем. Память 1320 может быть устройством любого типа для хранения данных приложений, а также других данных, связанные с описанной операцией. Данные приложения и другие данные, принимаются процессором 1310 для конфигурирования (например, программирования) процессора 1310 для выполнения актов по эксплуатации в соответствии с настоящей системой. Таким образом, сконфигурированный процессор 1310 становится специализированной машиной, особенно приспособленной для осуществления в соответствии с вариантами осуществления настоящей системы.
Операции по эксплуатации могут включать в себя конфигурирование системы 1300, например, посредством конфигурирования процессора 1310 для получения информации из данных, вводимых пользователем, как, например, от участка 1370 для ввода данных пользователем и/или памяти 1320 и обработки этой информации в соответствии с вариантами осуществления настоящей системы для того, чтобы определить функцию для применения и/или привод(ы), которым нужно управлять в соответствии с соответствующей функцией в соответствии с вариантами осуществления настоящей системы. Участок 1370 для ввода данных пользователем может включать в себя чувствительные к силе (чувствительные к касанию) датчики, клавиатуру, манипулятор типа «мышь», шаровой манипулятор и/или другое устройство, включающее в себя чувствительный к касанию дисплей, который может стоять отдельно или быть частью систем, такой как часть OHD, персональный компьютер, блокнотный компьютер, нетбук, компьютер планшетного типа, смартфон, карманный персональный компьютер (PDA), мобильный телефон и/или другое устройство для обмена данными с процессором 1310 через любой работоспособный канал передачи данных. Участок 1370 для ввода данных пользователем может быть приспособлен для взаимодействия с процессором 1310, в том числе позволяя взаимодействие в рамках UI, как описано в настоящем документе. Очевидно, что процессор 1310, память 1320, UI 1330 и/или участок 1370 для ввода данных пользователем могут все или частично быть частью компьютерной системы или другого устройства, такого как клиент и/или сервер, как описано в настоящем документе.
Процессор 1310 Может вывести информацию на UI 1330, как на дисплей системы (например, графический дисплей, светоизлучающие диоды (LEDs), a жидкокристаллический дисплей (LCD) и т.д.
Эти способы настоящей системы особенно подходят для выполнения процессором, который запрограммирован с помощью программы для ЭВМ, причем такая программа содержит модули, соответствующие одному или нескольким отдельным этапам или актам, описанным и/или предусмотренным настоящей системой.
Процессор 1310 выполнен с возможностью предоставления сигналов и/или выполнения операций в ответ на входные сигналы от участка 1370 для ввода данных пользователем, а также в ответ другим устройствам сети и выполнения инструкций, хранящихся в памяти 1320. Например, процессоры 1310 могут получить информацию обратной связи от датчиков обратной связи и могут обрабатывать эту информацию с тем, чтобы определить силу, приложенную к приспособлению для чистки, если желательно. Процессор 1310 может включать в себя один или несколько микропроцессоров, заказную специализированную интегральную схему(ы) или интегральную схему(ы) общего назначения, логическое устройство и т.д. Кроме того, процессор 1310 может быть специализированным процессором для осуществления в соответствии с настоящей системой или может быть процессором общего назначения, в котором только одна из многих функций действует для осуществления в соответствии с существующей системой. Процессор 1310 может работать с использованием части программ, сегментов многокомпонентной программы или может быть аппаратным устройством, использующим выделенную или многоцелевую интегральную схему.
Таким образом, для оптимального опыта очистки, варианты осуществления настоящей системы могут дать пользователям возможность управлять различными функциями устройства для ухода за полостью рта, как электронная зубная щетка и/или ирригатор. Например, варианты осуществления настоящей системы могут предоставить пользователю управление скоростью электронной зубной щетки и/или струи воды, выбрасываемой из автоматического ирригатора (например, устройства типа Airfloss™). То, что является оптимальным для пользователя может зависеть от различных факторов, таких как: желаемая эффективность, личные предпочтения, количество загрязнений, типа загрязнений, чувствительность, порог болевой чувствительности, расстояние между зубами и т.д. Таким образом, пользователь может увязывать функции с силой сжатия руки, характером распределения и т.д.
Таким образом варианты осуществления настоящей системы предлагают системы, устройства и способы, которые могут позволить пользователям легко управлять рабочими параметрами устройства для ухода за полостью рта. Например, вместо того, чтобы нажимать кнопки на консоли зубной щетки для выбора режима работы, пользователь может легко осуществлять управление для выбора различных функций электронной зубной щетки или ирригатора, работающих в соответствии с вариантами осуществления настоящей системы, например, посредством регулировки давления (например, сдавливая сильнее или слабее в месте хвата) на чувствительном к давлению месте хвата электронной зубной щетки или ирригатора. Чувствительное к давлению место хвата может сдавливаться во время использования для выбора функций, таких как впрыск воздуха или применение более жестких щетинок для удаления некоторых трудноудаляемых инородных тел и веществ и т.д., которые могут быть желательны в различные моменты времени во время операции чистки. Предоставляя чувствительное к касанию место хвата, пользователь не должен иметь в поле зрения консоль зубной щетки или ирригатора для того, чтобы видеть, где нужно нажать, чтобы выбрать функцию. Кроме того, место хвата электронной зубной щетки или ирригатора может иметь гладкую поверхность без физических кнопок, что делает электронную зубную щетку или ирригатор более простым для чистки и более гигиеничным.
Хотя настоящее изобретение было показано и описано со ссылкой на конкретные примерные варианты осуществления, специалисты в данной области поймут, что настоящее изобретение ими не ограничивается, но что различные изменения в форме и деталях, в том числе сочетание различных признаков и вариантов осуществления, могут быть осуществлены в них без отступления от сущности и объема изобретения. Например, вместо зубной щетки или устройства для чистки полости рта, настоящая система одинаково применима к предметам, используемым стоматологами: таким как боры и/или оптическая камера или просмотровый прибор для диагностики и т.д. Дополнительные изменения настоящей системы будут легко осуществимы для специалиста в данной области и охватываются следующей формулой изобретения.
В заключение, вышеприведенное обсуждение предназначено только для иллюстрации настоящей системы и не должны рассматриваться в качестве ограничения приложенной формулы изобретения к любому конкретному варианту осуществления или группе вариантов осуществления. Таким образом, хотя настоящая система описана со ссылками на примерные варианты осуществления, следует также иметь в виду, что многочисленные изменения и альтернативные варианты осуществления могут быть разработаны средними специалистами в данной области, не выходя за границы и определенную сущность и объем настоящей системы, как изложено в формуле изобретения, которая следует. Кроме того, заголовки, включенные в данный документ предназначены для облегчения обзора, но не предполагают ограничение объема настоящей системы. Таким образом, описание и чертежи должны рассматриваться как иллюстрации и не предназначены для ограничения объема прилагаемой формулы изобретения.
Заголовки, включенные в данный документ предназначены для облегчения обзора, но не предполагают ограничение объема настоящей системы. Таким образом, описание и чертежи должны рассматриваться как иллюстрации и не предназначены для ограничения объема прилагаемой формулы изобретения.
При интерпретации прилагаемой формулы изобретения, следует иметь в виду что:
a) слово «содержит» не исключает наличия других элементов или действий, чем те, которые перечислены в данном пункте формулы изобретения;
b) использование единственного числа элемента не исключает присутствия множества таких элементов;
c) любые ссылочные позиции в формуле изобретения никак не ограничивают их объем;
d) несколько «средств» может быть представлено посредством одного и того же элемента или аппаратного обеспечения или программного обеспечения,
e) любой из раскрытых элементов может иметь в своем составе части аппаратного оборудования (например, включающего в себя обособленные и встроенные электронные схемы), части программного обеспечения (например, компьютерное программирование) и любое их сочетание;
f) части аппаратного оборудования могут иметь в своем составе аналоговые или цифровые части, или обе эти части;
g) любое из раскрытых устройств их части могут быть объединены вместе или разделены на дополнительные части, если специально не утверждается иное;
h) предполагается, что никакой конкретной последовательности действий или этапов не требуется, если специально не указано иное; и
i) термин «множество» элементов включает в себя два или более заявляемых элемента, и не подразумевает какого-либо специального диапазона числа элементов; то есть, множество элементов может состоять всего лишь из двух элементов, а может включать в себя громадное число элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБНАЯ ЩЕТКА С СИСТЕМОЙ ВЫБОРА НА ОСНОВЕ ПЕРЕМЕННОГО СЕНСОРНОГО ВОЗДЕЙСТВИЯ И СПОСОБ ЕЕ РАБОТЫ | 2014 |
|
RU2652325C1 |
| ТРАНСФОРМИРУЕМОЕ УСТРОЙСТВО ДЛЯ ГИГИЕНЫ ПОЛОСТИ РТА | 2022 |
|
RU2794294C1 |
| ЭЛЕТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА С ДАТЧИКОМ ДАВЛЕНИЯ | 2013 |
|
RU2657956C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА С ЖЕРТВЕННЫМ ЭЛЕКТРОДОМ | 2016 |
|
RU2741827C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2017 |
|
RU2712338C1 |
| ОПРЕДЕЛЕНИЕ НАЛЕТА С ИСПОЛЬЗОВАНИЕМ ПОТОКОВОГО ЗОНДА | 2013 |
|
RU2644521C2 |
| ОБУЧАЮЩИЕ УСТРОЙСТВА И СПОСОБЫ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2016 |
|
RU2709927C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА С РЕГУЛИРУЕМЫМ ЦЕНТРОМ МАСС | 2008 |
|
RU2431452C1 |
| УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ И СПОСОБ ЕЕ ПРЕДОСТАВЛЕНИЯ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ УСТРОЙСТВ ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА, ПРИКЛАДЫВАЮЩИХ ДАВЛЕНИЕ ПРИ ИСПОЛЬЗОВАНИИ | 2017 |
|
RU2724672C2 |
| СИСТЕМЫ ДЛЯ ГИГИЕНЫ ПОЛОСТИ РТА | 2018 |
|
RU2753629C1 |
Предложенное устройство (100) для полости рта содержит участок (102) корпуса, имеющий первый и второй концы (120, 122), и участок (118) сжатия; приспособление (108) для полости рта, соединенное с первым концом (120) участка (102) корпуса; чувствительный к касанию (TS) датчик (104), который расположен на участке (102) корпуса, и выводящий показание датчика, указывающее силу, приложенную пользователем к нему. Кроме того, контроллер (107) выполнен с возможностью сравнения показания датчика по меньшей мере с одним пороговым значением, и приведения в действие приспособления (108) для полости рта на основании результатов сравнения. 3 н. и 17 з.п. ф-лы, 17 ил., 1 табл.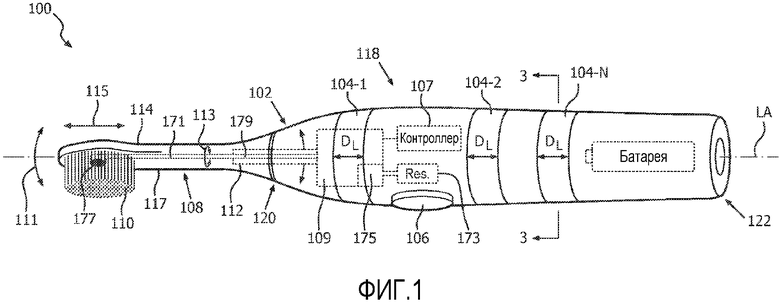
1. Устройство (100) для полости рта, содержащее:
участок (102) корпуса, имеющий первый и второй концы (120, 122), и участок (118) сжатия;
приспособление (108) для полости рта, соединенное с первым концом (120) участка (102) корпуса;
чувствительный к касанию (TS) датчик (104), который расположен на участке (102) корпуса, содержащий наружную оболочку 119 и датчик 116 давления,
причем датчик 116 давления содержит множество зон давления, каждая из которых сконфигурирована с возможностью обнаружения давления, приложенного к ней, и формирования сигнала, указывающего зону, к которой приложено давление,
контроллер (107), выполненный с возможностью распознавания характера распределения давления и использования распознанного характера распределения давления для идентификации пользователя или типа пользователя, конфигурирования и приведения в действие приспособления (108) для полости рта в соответствии с распознанным пользователем или типом пользователя, причем контроллер (107) сконфигурирован с возможностью использования карты функций, характерных для требуемого пользователя.
2. Устройство по п. 1, в котором приспособление (108) для полости рта содержит по меньшей мере одно из: зубную щетку (114), сопло для воды, средство типа airfloss и бор.
3. Устройство по п. 2, в котором TS датчик (104) содержит чувствительный к силе резистор, который выводит значение сопротивления.
4. Устройство по п. 3, в котором TS датчик (104) содержит множество полимерных слоев (460, 462, 464), которые наслаиваются друг на друга и которые по существу опоясывают участок (108) корпуса.
5. Устройство по п. 1, в котором контроллер (107) дополнительно выполнен с возможностью определения частоты для возвратно-поступательного привода приспособления (108) для полости рта в соответствии с результатами сравнения.
6. Устройство по п. 1, в котором для того, чтобы привести в действие приспособление (108) для полости рта, контроллер (107) управляет приводом (109), который соединен с приспособлением (108) для полости рта, чтобы предоставить электродвижущую силу приспособлению (108) для полости рта.
7. Устройство по п. 1, в котором показание датчика является величиной сопротивления, которое пропорционально силе, приложенной к TS датчику (104).
8. Устройство по п. 1, дополнительно содержащее привод (109), который соединен с приспособлением (108) для полости рта, причем привод (109) содержит по меньшей мере одно из: ротационный двигатель, линейный двигатель и насос.
9. Устройство по п. 8, дополнительно содержащее резервуар (173) для текучей среды, соединенный с насосом.
10. Устройство по п. 1, в котором контроллер (107) дополнительно выполнен с возможностью определения частоты для приведения в движение приспособления (108) для полости рта в соответствии с показанием датчика, основанном на взаимно-однозначном соответствии.
11. Устройство по п. 1, в котором контроллер (107) дополнительно выполнен с возможностью определения частоты для приведения в движение приспособления (108) для полости рта в соответствии с показанием датчика, основанном на дискретной основе.
12. Способ (1200) приведения в действие устройства (100) для полости рта по п. 1, причем приспособление (108) для полости рта соединено с приводом (109), при этом способ (1200) выполняется по меньшей мере одним контроллером (107) устройства (100) для полости рта и содержит этапы:
получения (1203) информации датчика, сгенерированной чувствительным к касанию (TS) датчиком (104, 106), расположенным на участке (118) захвата участка корпуса, причем информация датчика соответствует силе, приложенной пользователем к поверхности TS датчика (104, 106);
выбора (1205) функции из множества функций на основе информации датчика; и
управления (1207) приводом в соответствии с выбранной функцией.
13. Способ по п. 12, дополнительно содержащий операцию формирования TS датчиком (104, 106) информации датчика, чтобы включать в себя значение импеданса, которое соответствует силе, приложенной пользователем к поверхности TS датчика (104, 106).
14. Способ по п. 12, в котором TS датчик (104, 106) включает в себя по меньшей мере одно кольцо (104), которое опоясывает участок (102) корпуса.
15. Способ по п. 14, в котором акт выбора (1205) функции из множества функций включает в себя операцию определения частоты, на которой запускается привод (109) в соответствии с информацией датчика на основе взаимно-однозначного соответствия или на дискретной основе.
16. Способ по п. 12, дополнительно содержащий операцию управления дополнительным приводом для управления и выдвижения щетинок (852) из приспособления (108, 808) для полости рта в соответствии с выбранной функцией.
17. Постоянный машиночитаемый носитель, содержащий машинные инструкции, которые, при их исполнении процессором (107, 1310), настраивают процессор на управление работой устройства (100) по п. 1, причем приспособление (108) для полости рта соединено с приводом (109), процессор (107, 1310) управляет работой посредством выполнения операций способа по п. 12.
18. Постоянный машиночитаемый носитель по п. 17, в котором TS датчик (104, 106) выполнен с возможностью формирования информации датчика для сравнения со значением импеданса, которое соответствует силе, приложенной пользователем к поверхности TS датчика (104, 106), и где машинные инструкции дополнительно настраивают процессор (107, 1310) на выполнение акта считывания значения импеданса.
19. Постоянный машиночитаемый носитель по п. 17, в котором машинные инструкции дополнительно настраивают процессор (107, 1310) на выполнение операции обработки информации датчика для определения характера распределения силы, приложенной к TS датчику (104, 106).
20. Постоянный машиночитаемый носитель по п. 19, где операция выбора включает в себя операцию определения частоты, на которой запускается привод (109) в соответствии с информацией датчика на основе взаимно-однозначного соответствия или на дискретной основе.
| WO 2012042493 A1, 05.04.2012 | |||
| US3463990 A, 26.08.1969 | |||
| US 2012203213 A1, 09.08.2012 | |||
| JP 2013034636 A, 21.02.2013 | |||
| US 6037724 A, 14.03.2000. |

