ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящая технология относится к реализуемым компьютером способам для обучения алгоритмов машинного обучения, а более конкретно, к способам генерирования и обучения алгоритма машинного обучения для прогнозирования параметра намерения для объекта на местности для использования в беспилотных (self-driving) транспортных средствах.
УРОВЕНЬ ТЕХНИКИ
[0002] Беспилотные транспортные средства являются транспортными средствами, которые способны автономно перемещаться по частным и/или общественным местам. Используя систему датчиков, которые обнаруживают местоположение и/или окружение транспортного средства, логика внутри транспортного средства или связанная с ним управляет скоростью, тягой, торможением и рулевым управлением транспортного средства на основе обнаруживаемых датчиками местоположения и окружения беспилотного транспортного средства.
[0003] В самоуправляемом транспортном средстве могут использоваться различные системы датчиков, например, но без ограничения, системы камер, радарные системы и системы обнаружения света и определения дальности (LIDAR). Различные системы датчиков могут быть использованы для захвата различной информации, и/или в другом формате, о местоположении и окружении беспилотного транспортного средства. Например, системы камер могут использоваться для захвата данных изображения окружения беспилотного транспортного средства. В другом примере системы LIDAR могут использоваться для захвата данных облака точек для построения трехмерных картографических представлений окружения и других потенциальных объектов, расположенных в непосредственной близости от беспилотного транспортного средства.
[0004] Одна проблема, связанная с правильной эксплуатацией беспилотного транспортного средства, заключается в правильном определении вероятного намерения других движущихся объектов, таких как другие транспортные средства, вблизи беспилотного транспортного средства. На это определение может влиять большое число факторов, в том числе обнаруженная информация о конфигурации и движении окружающих объектов, движении беспилотного транспортного средства и местности, по которой движется беспилотное транспортное средство и другие объекты. Если это определение не является правильным, это может привести к резким маневрам или даже столкновению.
[0005] Хотя для выполнения этого определения можно использовать различные прогностические аналитические подходы, многие из них, такие как алгоритмы машинного обучения, необходимо обучать с использованием наборов предварительно размеченных обучающих данных. Чтобы обучить алгоритм машинного обучения точно прогнозировать «намерение» движущегося объекта по данным датчика, доступным для беспилотного транспортного средства, может потребоваться большие наборы предварительно размеченных обучающих данных, генерирование которых может быть трудоемким и дорогостоящим.
[0006] Патент США 10,739,775 раскрывает систему и способ для моделирования траектории автономного транспортного средства в реальном мире. Принимают обучающие данные от системы сбора данных в реальном мире, получают истинные данные и обучают множество моделей прогнозирования траектории. Фаза моделирования выполняется для генерирования ближайшего сценария для каждого моделируемого транспортного средства. Ближайшие сценарии соответствуют разным местоположениям, схемам движения или условиям окружающей среды. Могут быть обеспечены данные о намерении транспортного средства, соответствующие представлению данных различных типов моделируемых намерений водителя или транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Как обсуждалось выше, для обучения алгоритма машинного обучения надежно прогнозировать намерение движущегося объекта может потребоваться использование большого набора обучающих данных. «Наивный» подход к созданию набора обучающих данных заключается в сборе данных о состоянии беспилотного транспортного средства, состоянии объекта и местности, и ручной разметке каждого элемента таких данных с помощью параметра намерения. Ручное генерирование больших наборов данных для обучения алгоритмов машинного обучения является чрезвычайно дорогостоящим и трудоемким процессом.
[0008] Соответственно, настоящая технология обеспечивает альтернативу использованию наборов размеченных вручную данных для обучения алгоритмов машинного обучения определять параметр намерения на местности. В частности, настоящая технология использует автоматизированный подход к генерированию больших наборов обучающих данных для обучения алгоритмов машинного обучения для использования с беспилотными транспортными средствами для определения параметра намерения. Затем технология использует алгоритмы машинного обучения, которые были обучены с использованием этих наборов данных, для эксплуатации беспилотного транспортного средства. Соответственно, настоящая технология эффективно улучшает работу беспилотных или полуавтономных транспортных средств.
[0009] В соответствии с одним аспектом настоящего раскрытия, технология реализована в способе обучения алгоритма машинного обучения для прогнозирования параметра намерения для объекта на местности, в которой беспилотное транспортное средство движется по этой местности в непосредственной близости от объекта. Способ является выполняемым сервером и включает в себя осуществление доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище. Рабочие данные включают в себя данные, указывающие: местность обучения, состояния обучающего транспортного средстве на местности обучения и состояния обучающего объекта на местности обучения.
[00010] Для целевого момента времени в рабочих данных способ включает в себя извлечение из рабочих данных посредством сервера данных, указывающих местность обучения в целевой момент времени, целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени, и будущее состояние обучающего транспортного средства после целевого момента времени, целевое состояние обучающего объекта, соответствующее целевому моменту времени, и будущее состояние обучающего объекта после целевого момента времени. Способ также включает в себя генерирование сервером обучающего набора для обучения алгоритма машинного обучения, причем обучающий набор имеет входную информацию и безасессорную метку (получаемую без участия асессоров или оценщиков метку, assessor-less label). Входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени.
[00011] Способ дополнительно включает в себя обучение сервером алгоритма машинного обучения на основе обучающего набора для прогнозирования, во время фазы использования, параметра намерения, указывающего намерение объекта на местности во время целевого момента времени использования, на основе данных, указывающих (i) местность в целевой момент времени использования, (ii) состояние использования беспилотного транспортного средства в целевой момент времени использования и (iii) состояние использования упомянутого объекта.
[00012] В некоторых реализациях извлечение включает в себя извлечение сервером данных, указывающих (i) набор предыдущих состояний обучающего транспортного средства до целевого момента времени и (ii) набор предыдущих состояний обучающего объекта до целевого момента времени. Входная информация дополнительно включает в себя данные, указывающие наборы предыдущих состояний обучающего транспортного средства и обучающего объекта.
[00013] В некоторых реализациях набором предыдущих состояний обучающего транспортного средства является часть траектории обучающего транспортного средства до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени. В некоторых реализациях набором предыдущих состояний обучающего объекта является часть траектории обучающего объекта до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени.
[00014] В некоторых реализациях извлечение включает в себя извлечение сервером данных, указывающих (i) набор будущих состояний обучающего транспортного средства после целевого момента времени, в том числе упомянутое будущее состояние обучающего транспортного средства, и (ii) набор будущих состояний обучающего объекта после целевого момента времени, в том числе упомянутое будущее состояние обучающего объекта. Безасессорная метка в этих реализациях может быть основана на наборах будущих состояний обучающего транспортного средства и обучающего объекта. В некоторых из этих реализаций набор будущих состояний обучающего транспортного средства является частью траектории обучающего транспортного средства после целевого момента времени, а набор будущих состояний обучающего объекта является частью другой траектории обучающего объекта после целевого момента времени.
[00015] В некоторых реализациях способ дополнительно включает в себя выбор сервером целевого момента времени в рабочих данных. Выбор включает в себя идентификацию сервером определенного состояния обучающего транспортного средства и определенного состояния обучающего объекта в рабочих данных, которые связаны с одной и той же позицией на местности обучения, и выбор сервером целевого момента времени в качестве предшествующего момента времени относительно определенного момента времени, связанного с определенным состоянием обучающего транспортного средства.
[00016] В некоторых реализациях способ включает в себя генерирование сервером безасессорной метки на основе данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. Генерирование безасессорной метки включает в себя определение сервером того, что будущие состояния обучающего транспортного средства и обучающего объекта указывают по меньшей мере одно из: обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения и что обучающее транспортное средство занимает эту одну позицию раньше обучающего объекта; обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения и что обучающий объект занимает эту одну позицию раньше обучающего транспортного средства; обучающее транспортное средство и обучающий объект после целевого момента времени не занимают одну позицию на местности обучения; и обучающий объект занимает определенную позицию на местности обучения в будущий момент времени, и что обучающее транспортное средство занимает другую определенную позицию на местности обучения в будущий момент времени, а расстояние между упомянутой определенной позицией и другой определенной позицией ниже порогового безопасного расстояния.
[00017] В некоторых реализациях способ дополнительно включает в себя передачу сервером информации, представляющей алгоритм машинного обучения, на электронное устройство, связанное с беспилотным транспортным средством. В этих реализациях в целевой момент времени использования, во время работы беспилотного транспортного средства, способ включает в себя выполнение электронным устройством алгоритма машинного обучения для генерирования параметра намерения, и инициирование электронным устройством работы беспилотного транспортного средства по меньшей мере частично на основе параметра намерения.
[00018] В некоторых реализациях алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений. В некоторых реализациях обучающее транспортное средство является беспилотным транспортным средством. В некоторых реализациях объект является движущимся объектом. В некоторых реализациях объект является по меньшей мере одним из транспортного средства и пешехода.
[00019] В некоторых реализациях местность обучения включает в себя участок дороги обучения. Данные о местности обучения могут представлять собой изображение вида с высоты птичьего полета для участка дороги обучения в целевой момент времени.
[00020] В соответствии с другими аспектами настоящего раскрытия обеспечен способ эксплуатации беспилотного транспортного средства. Способ включает в себя прием на электронном устройстве, связанном с беспилотным транспортным средством, данных от датчика, связанного с беспилотным транспортным средством, причем данные указывают состояние беспилотного транспортного средства, состояние объекта вблизи беспилотного транспортного средства и местность, по которой движется беспилотное транспортное средство. Способ дополнительно включает в себя предоставление упомянутых данных в алгоритм машинного обучения на электронном устройстве, причем алгоритм машинного обучения определяет параметр намерения, указывающий намерение объекта на местности во время целевого момента времени, и инициирование электронным устройством работы беспилотного транспортного средства по меньшей мере частично на основе параметра намерения. Алгоритм машинного обучения был обучен с использованием набора обучающих данных, сгенерированного посредством, по меньшей мере частично: осуществления доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище и включают в себя данные, указывающие: местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения. Генерирование обучающего набора дополнительно включало в себя, для целевого момента времени обучения в рабочих данных, извлечение из рабочих данных посредством сервера данных, указывающих: местность обучения в целевой момент времени обучения, целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени обучения, и будущее состояние обучающего транспортного средства после целевого момента времени обучения; и целевое состояние обучающего объекта, соответствующее целевому моменту времени обучения, и будущее состояние обучающего объекта после целевого момента времени обучения. Генерирование обучающего набора дополнительно включало в себя генерирование сервером обучающего набора данных для обучения алгоритма машинного обучения, причем набор обучающих данных имеет входную информацию и безасессорную метку, причем входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта, а безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени обучения.
[00021] В некоторых реализациях этого аспекта алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений. В некоторых реализациях этого аспекта способ дополнительно включает в себя прием на электронном устройстве информации, представляющей алгоритм машинного обучения, от сервера.
[00022] В соответствии с дополнительным аспектом настоящего раскрытия данная технология реализована в самоуправляемом транспортном средстве. Беспилотное транспортное средство включает в себя по меньшей мере один датчик, выполненный с возможностью сбора данных датчика, указывающих состояние беспилотного транспортного средства, состояние объекта вблизи беспилотного транспортного средства и местность, по которой движется беспилотное транспортное средство. Беспилотное транспортное средство дополнительно включает в себя электронное устройство, включающее в себя процессор и память. Память хранит запрограммированные инструкции, которые при выполнении процессором побуждают электронное устройство: предоставлять данные датчика в алгоритм машинного обучения, выполняемый на процессоре, причем алгоритм машинного обучения определяет параметр намерения, указывающий намерение объекта на местности во время целевого момента времени; и инициировать работу беспилотного транспортного средства по меньшей мере частично на основе этого параметра намерения. Алгоритм машинного обучения включает в себя значения, сохраненные в памяти, которые были определены посредством обучения алгоритма машинного обучения с использованием набора обучающих данных, сгенерированного посредством, по меньшей мере частично: осуществления доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище и включают в себя данные, указывающие: местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения. Генерирование обучающего набора дополнительно включало в себя, для целевого момента времени обучения в рабочих данных, извлечение из рабочих данных посредством сервера данных, указывающих: местность обучения в целевой момент времени обучения, целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени обучения, и будущее состояние обучающего транспортного средства после целевого момента времени обучения; и целевое состояние обучающего объекта, соответствующее целевому моменту времени обучения, и будущее состояние обучающего объекта после целевого момента времени обучения. Генерирование обучающего набора дополнительно включало в себя генерирование сервером обучающего набора данных для обучения алгоритма машинного обучения, причем набор обучающих данных имеет входную информацию и безасессорную метку, причем входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта, а безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени обучения.
[00023] В некоторых реализациях согласно этому аспекту данного раскрытия алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений. В некоторых реализациях согласно этому аспекту память дополнительно хранит запрограммированные инструкции, которые при выполнении процессором побуждают электронное устройство принимать информацию, представляющую алгоритм машинного обучения, от сервера.
[00024] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и приложенной формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00025] Эти и другие признаки, аспекты и преимущества настоящей технологии станут более понятными из нижеследующего описания, приложенной формулы изобретения и сопроводительных чертежей, на которых:
[00026] ФИГ. 1 иллюстрирует схематичное представление примерной компьютерной системы для использования в некоторых реализациях систем и/или способов настоящей технологии.
[00027] ФИГ. 2 иллюстрирует сетевую вычислительную среду, включающую в себя беспилотное транспортное средство, подходящую для использования с некоторыми реализациями настоящей технологии.
[00028] ФИГ. 3 демонстрирует временную шкалу процесса сбора данных посредством обучающего транспортного средства.
[00029] ФИГ. 4 иллюстрирует пример сценария сбора данных обучающим транспортным средством на местности обучения.
[00030] ФИГ. 5 иллюстрирует процесс обучения алгоритма машинного обучения с использованием рабочих данных, собранных обучающим транспортным средством.
[00031] ФИГ. 6 демонстрирует примерный сценарий для алгоритма машинного обучения, используемого в самоуправляемом транспортном средстве.
[00032] ФИГ. 7 изображает генерирование прогнозного параметра намерения для объекта посредством обученного алгоритма машинного обучения с использованием данных во время использования.
[00033] ФИГ. 8 иллюстрирует блок-схему последовательности операций способа обучения алгоритма машинного обучения для прогнозирования параметра намерения объекта на местности и использования обученного алгоритма машинного обучения.
ПОДРОБНОЕ ОПИСАНИЕ
[00034] Различные репрезентативные реализации раскрытой технологии будут более подробно описаны ниже со ссылкой на прилагаемые чертежи. Однако настоящая технология может быть реализована во многих различных формах, и ее не следует рассматривать как ограниченную примерными реализациями, раскрытыми в данном документе. На чертежах размеры и относительные размеры слоев и областей могут быть увеличены для ясности. Повсюду одинаковые цифры относятся к одинаковым элементам.
[00035] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем.
[00036] Кроме того, нижеследующее описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность.
[00037] В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия понимаю и, опять же, не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области сможет осуществить другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[00038] Следует понимать, что, хотя термины первый, второй, третий и т.д. могут использоваться в данном документе для описания различных элементов, эти элементы не должны ограничиваться этими терминами. Эти термины используются для отличия одного элемента от другого. Таким образом, первый элемент, обсуждаемый ниже, можно было бы назвать вторым элементом без отступления от идей настоящего раскрытия. Используемый здесь термин «и/или» включает в себя любые и все комбинации из одного или более связанных перечисленных элементов.
[00039] Следует понимать, что, когда элемент упоминается как «соединенный» или «связанный» с другим элементом, он может быть напрямую связан или соединен с другим элементом, или могут присутствовать промежуточные элементы. Напротив, когда элемент упоминается как «непосредственно соединенный» или «непосредственно связанный» с другим элементом, никакие промежуточные элементы не присутствуют. Другие слова, используемые для описания взаимосвязи между элементами, следует интерпретировать аналогичным образом (например, «между» или «непосредственно между», «смежный» или «непосредственно смежный» и т.д.).
[00040] Используемая здесь терминология предназначена только для описания конкретных репрезентативных реализаций и не предназначена для ограничения настоящей технологии. Предполагается, что используемые здесь формы единственного числа включают в себя формы множественного числа, если контекст явно не указывает иное. Кроме того, будет понятно, что термины «содержит» и/или «содержащий», когда они используются в этом описании, определяют наличие заявленных функций, единых целых, этапов, операций, элементов и/или компонентов, но не исключают наличие или добавление одной или более других функций, единых целых, этапов, операций, элементов, компонентов и/или их групп.
[00041] Функции различных элементов, показанных на фигурах, в том числе любого функционального блока, отмеченного как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение. При обеспечении процессором функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. В некоторых реализациях настоящей технологии процессор может быть процессором общего назначения, например центральным процессором (CPU), или процессором, предназначенным для конкретной цели, например цифровым сигнальным процессором (DSP). Кроме того, явное использование термина «процессор» не должно толковаться как относящееся исключительно к аппаратному обеспечению, способному выполнять программное обеспечение, и может неявно включать в себя, не ограничиваясь, специализированную интегральную схему (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, оперативную память (RAM) и долговременное хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав.
[00042] Программные модули или просто модули, или блоки, которые предполагаются как программное обеспечение, могут быть представлены здесь как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое показано явно или неявно. Кроме того, следует понимать, что модуль может включать в себя, например, но без ограничения, компьютерную программную логику, компьютерные программные инструкции, программное обеспечение, стек, микропрограммное обеспечение, аппаратные схемы или их комбинацию, которая обеспечивает требуемые возможности.
[00043] В контексте настоящего описания «база данных» представляет собой любую структурированную совокупность данных, независимо от ее конкретной структуры, программное обеспечение для администрирования базы данных, или компьютерное аппаратное обеспечение, на котором данные хранятся, реализуются или их делают доступными для использования иным образом. База данных может размещаться на том же аппаратном обеспечении, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может размещаться на отдельном аппаратном обеспечении, например на выделенном сервере или множестве серверов.
[00044] Настоящая технология может быть реализована как система, способ и/или компьютерный программный продукт. Компьютерный программный продукт может включать в себя считываемый компьютером носитель данных (или носители), хранящий считываемые компьютером программные инструкции, которые при выполнении процессором побуждают процессор осуществлять аспекты раскрытой технологии. Считываемый компьютером носитель данных может быть, например, электронным запоминающим устройством, магнитным запоминающим устройством, оптическим запоминающим устройством, электромагнитным запоминающим устройством, полупроводниковым запоминающим устройством или любой их подходящей комбинацией. Неисчерпывающий список более конкретных примеров считываемого компьютером носителя данных включает в себя: портативный компьютерный диск, жесткий диск, оперативную память (RAM), постоянную память (ROM), флэш-память, оптический диск, карту памяти, дискету, носитель с механическим или визуальным кодированием (например, перфокарту или штрих-код) и/или их любую комбинацию. Считываемый компьютером носитель данных, используемый в данном документе, следует рассматривать как долговременный считываемый компьютером носитель. Его не следует рассматривать как переходной сигнал, такой как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся по волноводу или другим средам передачи (например, световые импульсы, проходящие по оптоволоконному кабелю), или электрические сигналы, передаваемые по проводу.
[00045] Будет понятно, что считываемые компьютером программные инструкции могут быть загружены в соответствующие вычислительные или обрабатывающие устройства со считываемого компьютером носителя данных или во внешний компьютер или внешнее запоминающее устройство через сеть, такую как Интернет, локальная сеть, глобальная сеть и/или беспроводная сеть. Сетевой интерфейс в вычислительном/обрабатывающем устройстве может принимать считываемые компьютером программные инструкции через сеть и пересылать считываемые компьютером программные инструкции для сохранения на считываемом компьютером носителе данных в соответствующем вычислительном или обрабатывающем устройстве.
[00046] Считываемые компьютером программные инструкции для выполнения операций согласно настоящему раскрытию могут быть инструкциями ассемблера, машинными инструкциями, инструкциями микропрограммного обеспечения, конфигурационными данными для интегральной схемы или либо исходным кодом, либо объектным кодом, написанным на любой комбинации из одного или более языков программирования. Считываемые компьютером программные инструкции могут выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как автономный программный пакет, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа.
[00047] Все утверждения в данном документе, излагающие принципы, аспекты и реализации настоящей технологии, а также ее конкретные примеры, предназначены для охвата как их структурных, так и функциональных эквивалентов, независимо от того, известны ли они в настоящее время или будут разработаны в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящей технологии. Аналогичным образом, будет понятно, что любые блок-схемы последовательности операций, потоковые схемы, схемы изменения состояний, псевдокоды и подобное представляют различные процессы, которые по своей сути могут быть представлены в считываемых компьютером программных инструкциях. Эти считываемые компьютером программные инструкции могут быть предоставлены процессору или другому программируемому устройству обработки данных для генерирования механизма, так что эти инструкции, которые выполняются посредством процессора компьютера или другого программируемого устройства обработки данных, образуют средство для реализации функций/действий, определенных на блок-схеме последовательности операций и/или блок-схеме, блок за блоком. Эти считываемые компьютером программные инструкции также могут храниться на считываемом компьютером носителе данных, который может управлять компьютером, программируемым устройством обработки данных и/или другими устройствами, чтобы они функционировали определенным образом, так что считываемый компьютером носитель данных, имеющий инструкции, хранящиеся на нем, содержит продукт производства, включающий в себя инструкции, которые реализуют аспекты функции/действия, определенных на блок-схемах последовательности операций, потоковых схемах, схемах изменения состояний, в псевдокоде и подобном.
[00048] Считываемые компьютером программные инструкции также могут быть загружены в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы вызывать выполнение ряда функциональных этапов на компьютере, другом программируемом устройстве или других устройствах для генерирования реализуемого компьютером процесса, так что инструкции, которые выполняются на компьютере, другом программируемом устройстве или другом устройстве, реализуют функции/действия, определенные на блок-схемах последовательности операций, потоковых схемах, схемах изменения состояний, в псевдокоде и подобном.
[00049] В некоторых альтернативных реализациях функции, отмеченные на блок-схемах последовательностей операций, потоковых схемах, схемах изменения состояний, в псевдокоде и подобном могут происходить не в показанном на фигурах порядке. Например, два блока, показанные последовательно на блок-схеме последовательности операций, могут фактически выполняться, по существу, одновременно, или блоки могут иногда выполняться в обратном порядке, в зависимости от задействованной функциональности. Также следует отметить, что каждая из функций, отмеченных на фигурах, и комбинации таких функций могут быть реализованы специализированными аппаратными системами, которые выполняют указанные функции или действия, или комбинациями специализированного аппаратного обеспечения и компьютерных инструкций.
[00050] Установив эти основные положения, теперь рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящего раскрытия.
Компьютерная система
[00051] ФИГ. 1 иллюстрирует компьютерную систему 100. Компьютерная система 100 может быть многопользовательским компьютером, однопользовательским компьютером, портативным компьютером, планшетным компьютером, смартфоном, встроенной системой управления или любой другой компьютерной системой, известной в настоящее время или той, которая будет разработана позже. Кроме того, следует понимать, что некоторые или все компоненты компьютерной системы 100 могут быть виртуализированными и/или облачными. Как показано на ФИГ. 1, компьютерная система 100 включает в себя один или более процессоров 102, память 110, интерфейс 120 хранения и сетевой интерфейс 140. Эти системные компоненты соединены между собой посредством шины 150, которая может включать в себя одну или более внутренних и/или внешних шин (на показаны) (например, шину PCI, универсальную последовательную шину, шину IEEE 1394 «Firewire», шину SCSI, шину Serial-ATA и т.д.), с которыми различные аппаратные компоненты связаны электронным образом.
[00052] Память 110, которая может быть оперативной памятью или памятью любого другого типа, может содержать данные 112, операционную систему 114 и программу 116. Данные 112 могут представлять собой любые данные, которые служат в качестве входной информации в или выходной информации из любой программы в компьютерной системе 100. Операционная система 114 представляет собой операционную систему, такую как MICROSOFT WINDOWS или LINUX. Программа 116 может быть любой программой или набором программ, которые включают в себя запрограммированные инструкции, которые могут выполняться процессором для управления действиями, предпринимаемыми компьютерной системой 100.
[00053] Интерфейс 120 хранения используется для соединения запоминающих устройств, таких как запоминающее устройство 125, с компьютерной системой 100. Одним типом запоминающего устройства 125 является твердотельный накопитель, который может использовать сборку интегральной схемы для постоянного хранения данных. Другой видом запоминающего устройства 125 является жесткий диск, такой как электромеханическое устройство, которое использует магнитное хранилище для хранения и извлечения цифровых данных. Точно так же запоминающее устройство 125 может быть оптическим приводом, устройством чтения карт, которое принимает съемную карту памяти, например SD-карту, или устройством флэш-памяти, которое может быть подключено к компьютерной системе 100, например, через универсальную последовательную шину (USB).
[00054] В некоторых реализациях компьютерная система 100 может использовать хорошо известные методы виртуальной памяти, которые позволяют программам компьютерной системы 100 вести себя так, как если бы они имели доступ к большому, непрерывному адресному пространству вместо доступа к многочисленным, меньшим пространствам хранения, таким как память 110 и запоминающее устройство 125. Следовательно, хотя показано, что данные 112, операционная система 114 и программы 116 постоянно размещены в памяти 110, специалисты в данной области техники поймут, что эти элементы не обязательно полностью содержатся в памяти 110 в одно и то же время.
[00055] Процессоры 102 могут включать в себя один или более микропроцессоров и/или других интегральных схем. Процессоры 102 выполняют программные инструкции, хранящихся в памяти 110. Когда компьютерная система 100 запускается, процессоры 102 могут изначально выполнять процедуру загрузки и/или программные инструкции, составляющие операционную систему 114.
[00056] Сетевой интерфейс 140 используется для соединения компьютерной системы 100 с другими компьютерными системами или сетевым устройствам (не показаны) через сеть 160. Сетевой интерфейс 140 может включать в себя комбинацию аппаратного и программного обеспечения, позволяющую осуществлять связь по сети 160. В некоторых реализациях сетевой интерфейс 140 может быть беспроводным сетевым интерфейсом. Программное обеспечение в сетевом интерфейсе 140 может включать в себя программное обеспечение, которое использует один или более сетевых протоколов для связи по сети 160. Например, сетевые протоколы могут включать в себя TCP/IP (протокол управления передачей/Интернет-протокол).
[00057] Следует понимать, что компьютерная система 100 является лишь примером, и что раскрытая технология может использоваться с компьютерными системами или другими вычислительными устройствами, имеющими другие конфигурации.
Сетевая вычислительная среда
[00058] ФИГ. 2 демонстрирует сетевую вычислительную среду 200, подходящую для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии. Сетевая вычислительная среда 200 включает в себя электронное устройство 210, связанное с транспортным средством 220 и/или связанное с пользователем (не показан), который связан с транспортным средством 220 (например, с оператором транспортного средства 220). Среда 200 также включает в себя сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет или подобное).
[00059] В по меньшей мере некоторых неограничивающих вариантах реализации настоящей технологии электронное устройство 210 коммуникативно связано с системами управления транспортного средства 220. Электронное устройство 210 может быть размещено или выполнено с возможностью управления различными операционными системами транспортного средства 220, в том числе, но без ограничения: ECU (блоком управления двигателем), системами рулевого управления, тормозными системами, а также системами сигнализации и освещения (т.е. фарами, стоп-сигналами, и/или указателями поворота). В такой реализации транспортное средство 220 может быть беспилотным транспортным средством 220.
[00060] В некоторых неограничивающих реализациях настоящей технологии сетевая вычислительная среда 200 может включать в себя спутник GPS (не показанный), передающий и/или принимающий сигнал GPS в/из электронного устройства 210. Следует понимать, что настоящая технология не ограничивается GPS и может использовать технологию позиционирования, отличную от GPS. Следует отметить, что спутник GPS может вообще не использоваться.
[00061] Транспортное средство 220, с которым связано электронное устройство 210, может быть любым транспортным средством для отдыха или иного, например, частным или коммерческим автомобилем, грузовиком, мотоциклом или подобным. Хотя транспортное средство 220 проиллюстрировано как наземное транспортное средство, это не является обязательным в каждой неограничивающей реализации настоящей технологии. Например, в некоторых неограничивающих реализациях настоящей технологии транспортное средство 220 может быть водным транспортным средством, таким как лодка, или летательным аппаратом, например летающим дроном.
[00062] Транспортное средство 220 может управляться пользователем или быть транспортным средством без водителя. В некоторых неограничивающих реализациях настоящей технологии предполагается, что транспортное средство 220 может быть реализовано как самоуправляемый автомобиль (SDC). Беспилотное транспортное средство 220 может быть полностью беспилотным транспортным средством или частично автономным транспортным средством, в котором человек-водитель управляет некоторыми аспектами работы транспортного средства, в то время как другие аспекты (например, «автопилот» на автомагистралях) автоматизированы. Следует отметить, что конкретные параметры транспортного средства 220 не являются ограничивающими, эти конкретные параметры включают в себя, например: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозную систему, топливную систему, пробег, идентификационный номер транспортного средства и объем двигателя, или другие характеристики или параметры транспортного средства.
[00063] Согласно настоящей технологии реализация электронного устройства 210 конкретным образом не ограничена. Например, электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, CPU транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет, персональный компьютер, встроенный в транспортное средство 220, и подобное. Таким образом, следует отметить, что электронное устройство 210 может быть или может не быть постоянно связано с транспортным средством 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых реализациях электронное устройство 210 имеет дисплей 270.
[00064] Электронное устройство 210 может включать в себя некоторые или все компоненты компьютерной системы 100, проиллюстрированной на Фигуре 1, в зависимости от конкретной реализации. В некоторых реализациях электронным устройством 210 является устройство бортового компьютера и включает в себя процессоры 102, запоминающее устройство 125 и память 110. Другими словами, электронное устройство 210 включает в себя аппаратное обеспечение, и/или программное обеспечение, и/или микропрограммное обеспечение, или их комбинацию для обработки данных, как будет более подробно описано ниже.
[00065] В некоторых неограничивающих реализациях настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих реализациях настоящей технологии сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи или подобная. Следует четко понимать, что реализации для сети 240 связи приведены только в иллюстративных целях. Между электронным устройством 210 и сетью 240 связи обеспечивается линия связи (отдельно не пронумерованная), реализация которой будет зависеть, среди прочего, от того, как реализуется электронное устройство 210. Просто в качестве примера, а не ограничения, в тех неограничивающих реализациях настоящей технологии, где электронное устройство 210 реализуется как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может быть реализована как линия беспроводной связи. Примеры линий беспроводной связи могут включать в себя, но без ограничения, линию сети связи 3G, линию сети связи 4G и подобные. Сеть 240 связи может также использовать беспроводное соединение с сервером 235.
[00066] В некоторых реализациях настоящей технологии сервер 235 реализуется как компьютерный сервер и может включать в себя некоторые или все компоненты компьютерной системы 100, показанной на Фигуре 1. В одном неограничивающем примере сервер 235 реализуется как сервер Dell™ PowerEdge™, работающий под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем аппаратном обеспечении, программном обеспечении и/или микропрограммном обеспечении, или их комбинации. В проиллюстрированных неограничивающих реализациях настоящей технологии сервер 235 является единственным сервером. В альтернативных неограничивающих реализациях настоящей технологии функциональные возможности сервера 235 могут быть распределены и могут быть реализованы посредством многочисленных серверов (не показаны).
[00067] В некоторых неограничивающих реализациях настоящей технологии процессоры 102 электронного устройства 210 могут поддерживать связь с сервером 235 для приема одного или более обновлений. Такие обновления могут включать в себя, но без ограничения, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и подобное. В некоторых неограничивающих реализациях настоящей технологии электронное устройство 210 также может быть выполнено с возможностью передачи на сервер 235 некоторых рабочих данных, таких как пройденные маршруты, данные о дорожном трафике, данные о рабочих характеристиках и подобное. Некоторые или все такие данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
[00068] Следует отметить, что электронное устройство 210 может использовать различные датчики и системы для сбора информации об окружении 250 транспортного средства 220. Как показано на Фигуре 2, транспортное средство 220 может быть оборудовано множеством 280 систем датчиков. Следует отметить, что различные системы датчиков из множества 280 систем датчиков могут использоваться для сбора различных типов данных, касающихся окружения 250 транспортного средства 220.
[00069] В одном примере множество 280 систем датчиков может включать в себя различные оптические системы, в том числе, среди прочего, одну или более систем датчиков типа камеры, которые установлены на транспортном средстве 220 и коммуникативно связаны с процессором 102 электронного устройства 210. Вообще говоря, одна или более систем датчиков типа камеры могут быть выполнены с возможностью сбора данных изображения различных частей окружения 250 транспортного средства 220. В некоторых случаях данные изображения, предоставленные одной или более системами датчиков типа камеры, могут использоваться электронным устройством 210 для выполнения процедур обнаружения объекта. Например, электронное устройство 210 может быть выполнено с возможностью подачи данных изображения, предоставленных одной или более системами датчиков типа камеры, в нейронную сеть обнаружения объектов (ODNN), которая обучена определять местоположения и классифицировать потенциальные объекты в окружении 250 транспортного средства 220.
[00070] В другом примере множество 280 систем датчиков может включать в себя одну или более систем датчиков радарного типа, которые установлены на транспортном средстве 220 и коммуникативно связаны с процессорами 102. Вообще говоря, одна или более систем датчиков радарного типа могут быть выполнены с возможностью использования радиоволн для сбора данных о различных частях окружения 250 транспортного средства 220. Например, одна или более систем датчиков радарного типа могут быть выполнены с возможностью сбора радарных данных о потенциальных объектах в окружении 250 транспортного средства 220, такие данные потенциально представляют расстояние до объектов от системы датчиков радарного типа, ориентацию объектов, вектор скорости и/или скорость объектов и подобное.
[00071] В дополнительном примере множество 280 систем датчиков может включать в себя одну или более систем LIDAR, которые установлены на транспортном средстве 220 и коммуникативно связаны с процессорами 102. Вообще говоря, система LIDAR выполнена с возможностью захвата данных об окружении 250 транспортного средства 220, используемых, например, для построения многомерной карты объектов в окружении 250 транспортного средства 220. Система LIDAR может быть установлена на транспортном средстве 220 или оно может быть ей дооснащено в различных местах и/или в различных конфигурациях для сбора информации об окружении 250 транспортного средства 220.
[00072] Например, в зависимости от реализации транспортного средства 220 и системы LIDAR, система LIDAR может быть установлена на внутренней, верхней части лобового стекла транспортного средства 220. Тем не менее, другие места для установки лидарной системы входят в объем настоящего раскрытия, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке, переднем бампере или сбоку транспортного средства 220.
[00073] В контексте настоящей технологии электронное устройство 210 выполнено с возможностью обнаружения одного или более объектов в окружении 250 транспортного средства 220 на основе данных, получаемых от одной или более систем камер и от одной или более систем LIDAR. Например, электронное устройство 210, выполненное с возможностью обнаружения определенного объекта в окружении 250 транспортного средства 220, может быть выполнено с возможностью идентификации данных LIDAR и данных камеры, связанных с данным объектом, генерирования «векторного представления», представляющего признаки, связанные с данным объектом, обнаружения объекта посредством генерирования ограничивающей рамки для этого объекта.
Обучение алгоритма машинного обучения
[00074] Как было отмечено выше, перед использованием алгоритмы машинного обучения необходимо обучить. Для многих алгоритмов машинного обучения это обучение выполняется с использованием большого набора предварительно размеченных обучающих данных. Подготовка такого набора предварительно размеченных обучающих данных может быть трудоемкой и дорогостоящей, особенно если метки для каждого элемента в наборе данных создаются человеком. Таким образом, в соответствии с различными реализациями настоящей технологии описывается способ автоматического генерирования набора обучающих данных для алгоритма машинного обучения для использования с беспилотным транспортным средством. Этот набор обучающих данных может быть сгенерирован с использованием предварительно собранных данных от обучающего транспортного средства, которым может управлять человек-водитель. Путем анализа данных, собранных обучающим транспортным средством, метки могут быть автоматически сгенерированы и добавлены к данным, собранным обучающим транспортным средством, для генерирования набора обучающих данных.
[00075] ФИГ. 3 демонстрирует временную шкалу процесса сбора данных посредством обучающего транспортного средства (не показано), которым может управлять человек-оператор (не показан) или которое может быть частично или полностью автоматизировано. В каждый момент времени (называемый «тиком» процесса) обучающее транспортное средство получает элемент рабочих данных, который включает в себя данные, указывающие местность обучения, состояние обучающего транспортного средства на местности обучения и состояние обучающего объекта на местности обучения. Затем элемент рабочих данных передается в хранилище, которое может включать в себя базу данных. Таким образом, как показано на временной шкале 300, во время работы обучающего транспортного средства, на каждом тике с тика1 302 по тик4 308, данные собираются для элемента 322-328 рабочих данных, который передается в хранилище 342-348. Хотя временная шкала 300 показывает только четыре тика 302-308, следует понимать, что этот процесс сбора данных может продолжаться во время всего периода работы обучающего транспортного средства, причем дополнительный элемент рабочих данных собирается и сохраняется на каждом «тике» во время этого периода.
[00076] В некоторых реализациях тики, такие как тики 302-308 могут происходить через предопределенные регулярные временные интервалы. Например, интервалы между тиками могут составлять 100 мс, поэтому будет 10 тиков в секунду. Однако тики не всегда должны разделяться равными периодами времени. Например, в некоторых реализациях разнесение во времени между тиками может зависеть от параметра транспортного средства, например скорости транспортного средства. Таким образом, когда транспортное средство движется с высокой скоростью, между тиками может быть меньше времени, чем когда транспортное средство движется с низкой скоростью.
[00077] В некоторых реализациях каждый из элементов 322-328 рабочих данных может включать в себя данные о местности обучения, состоянии обучающего транспортного средства и состоянии обучающего объекта. В некоторых реализациях эти данные могут быть разделены на многочисленные наборы данных, например набор данных об обучающем транспортном средстве, набор данных об обучающем объекте и набор данных о местности обучения.
[00078] Данные о состоянии обучающего транспортного средства могут включать в себя различную информацию, в том числе, например, позицию обучающего транспортного средства во время тика, а также другую информацию о состоянии обучающего транспортного средства, такую как скорость обучающего транспортного средства, направление или угол поворота, состояние акселератора, состояние торможения, и другую подобную информацию.
[00079] В некоторых реализациях местность обучения может быть частью элемента рабочих данных для каждого тика, при этом в некоторых реализациях данные об одной и той же местности обучения могут использоваться для многих тиков. В некоторых реализациях данные о местности обучения могут быть данными о местности, считываемыми датчиками на обучающем транспортном средстве. В некоторых реализациях данные о местности обучения могут быть данными карты или данными, представляющими вид с высоты птичьего полета для местности обучения.
[00080] В некоторых реализациях состояние обучающего объекта может включать в себя позицию обучающего объекта во время тика и может включать в себя другие данные, такие как скорость и направление обучающего объекта. В некоторых реализациях состояние обучающего объекта может быть представлено данными, собираемыми датчиками обучающего транспортного средства. Следует понимать, что обучающий объект обычно является движущимся объектом, вызывающим беспокойство при эксплуатации беспилотного транспортного средства, например пешеходом, велосипедистом или другим транспортным средством. Кроме того, следует понимать, что, хотя в примерах показан только один обучающий объект, в некоторых реализациях может быть множество обучающих объектов на местности обучения в непосредственной близости от обучающего транспортного средства.
[00081] В по меньшей мере некоторых вариантах осуществления настоящей технологии можно сказать, что элементы рабочих данных могут включать в себя данные о траектории, связанные с обучающим транспортным средством. Вообще говоря, данные о траектории представляют собой траекторию, по которой обучающее транспортное средство следует на участке дороги обучения. Предполагается, что данные о траектории могут включать в себя множество состояний обучающего транспортного средства во время эксплуатации, которые связаны с соответствующими временными метками.
[00082] В некоторых реализациях хранилище 342-348 может быть хранилищем в одном запоминающем устройстве или в одной базе данных. В некоторых реализациях каждое хранилище 342-348 может быть отдельной записью в одной базе данных или во множестве баз данных. Следует понимать, что хранилище 342-348 может быть на запоминающем устройстве или в базе данных, локальной по отношению к обучающему транспортному средству, или может быть внешним по отношению к обучающему транспортному средству, например, сетевым или облачным хранилищем. Кроме того, следует понимать, что все или часть рабочих данных могут быть перенесены из хранилища 342-348 на сервер или другую систему для использования при обучении алгоритма машинного обучения.
[00083] ФИГ. 4 демонстрирует примерный сценарий сбора данных обучающим транспортным средством 410 на местности 402 обучения. Местность 402 обучения, показанная в примере на ФИГ. 4, включает в себя участок дороги, образующий четырехсторонний перекресток или пересечение дорог. В примере, показанном на ФИГ. 4, обучающее транспортное средство 410 и обучающий объект 412 (в этом примере - другое транспортное средство) прибывают на перекресток в аналогичные моменты времени. Обучающее транспортное средство 410 пересекает перекресток первым.
[00084] В примере, показанном на ФИГ. 4, обучающее транспортное средство 410 и обучающий объект 412 показаны в виде прямоугольников, которые представляют ограничивающие рамки обучающего транспортного средства 410 и обучающего объекта 412. В некоторых реализациях позиции обучающего транспортного средства 410 и обучающего объекта 412, а также расстояние между ними могут быть определены с использованием ограничивающих рамок.
[00085] Линия 420 показывает траекторию обучающего транспортного средства, а линия 422 показывает траекторию обучающего объекта. Точки 430, 432, 434, 436 и 438 показывают позиции обучающего транспортного средства 410 соответственно в моменты t-3, t-2, t-1, t0 и t1 времени. Каждая из них представляет позицию транспортного средства во время соответствующего «тика», как обсуждалось выше. Аналогичные точки 440, 442, 444, 446 и 448 показывают позиции обучающего объекта 412 соответственно в моменты t-3, t-2, t-1, t0 и t1 времени. Как можно видеть, пути обучающего транспортного средства 410 и обучающего объекта 412 пересекаются в точке 404.
[00086] Целью обучающих данных, которые собираются обучающим транспортным средством 410, является обучение алгоритма машинного обучения определять параметр намерения обучающего объекта, такого как обучающий объект 412, в целевой момент времени. В примере, показанном на ФИГ. 4, целевым моментом времени является момент t0 времени, поэтому состояние в момент t0 времени и любое время до момента t0 времени может использоваться для формирования набора обучающих данных, в то время как состояние в момент t1 времени и любые будущие моменты времени может использоваться для разметки набора обучающих данных с помощью надлежащего параметра намерения для того, что фактически произошло в сценарии обучения.
[00087] В некоторых реализациях состояния обучающего транспортного средства 410 до целевого момента времени могут использоваться для определения траектории или части траектории обучающего транспортного средства 410 в течение временного интервала предопределенной длительности до целевого момента времени. Аналогично, в некоторых реализациях состояния обучающего объекта 410 до целевого момента времени могут использоваться для определения траектории или части траектории обучающего объекта 410 в течение временного интервала предопределенной длительности до целевого момента времени.
[00088] В некоторых реализациях обучающее транспортное средство просто регистрирует данные для каждого тика. После того, как данные зарегистрированы, эти данные могут быть проанализированы на сервере (например, зарегистрированные данные могут быть переданы на сервер после завершения операции обучения обучающего транспортного средства) для определения надлежащих целевых моментов времени для использования в наборе обучающих данных. Это может быть сделано, например, путем нахождения состояний обучающего транспортного средства и обучающего объекта в зарегистрированных данных, при которых обучающее транспортное средство и обучающий объект занимали одну позицию или находились в пределах предопределенного порогового безопасного расстояния друг от друга в непосредственной близости во времени, например, в течение одного тика или небольшого числа тиков. Целевой момент времени затем может быть найден, вернувшись назад к предыдущему моменту времени, до занятия обучающим транспортным средством этой позиции. Следует отметить, что, хотя это может быть сделано на сервере в любое время после регистрации данных, в некоторых реализациях обучающее транспортное средство может размечать определенные элементы рабочих данных как имеющие большую вероятность нахождения рядом с такими целевыми моментами времени по мере регистрации данных.
[00089] Таким образом, как видно на ФИГ. 4, как обучающее транспортное средство 410, так и обучающий объект 412 занимали точку 404 на местности 402 обучения в течение интервала между t0 и t1. Возврат к ближайшему имеющемуся до этого тику идентифицирует t0 в качестве целевого момента времени для обучения. Как только это установлено, сервер может использовать данные от t0 и ноль или более тиков до t0 для генерирования обучающих наборов, а данные от t1 и ноль или более тиков после t1 для генерирования безасессорной метки, представляющей параметр намерения касательно обучающего объекта. В некоторых реализациях обучающие данные могут быть разделены на набор данных для обучающего транспортного средства, набор данных для обучающего объекта и набор данных для местности обучения.
[00090] После того, как целевой момент времени был идентифицирован, сервер может также сгенерировать безасессорную метку для набора обучающих данных на основе одного или более будущих состояний - т.е. состояний, которые происходят после целевого момента времени - обучающего транспортного средства и обучающего объекта. Безасессорная метка представляет намерение обучающего объекта в целевой момент времени. Другими словами, одно или более будущих состояний используются как метка, указывающая намерение в целевой момент времени.
[00091] В некоторых реализациях безасессорная метка может быть выбрана из набора предопределенных будущих состояний для обучающего объекта. Например, в некоторых реализациях предопределенными будущими состояниями для обучающего объекта могут быть:
обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения, и что обучающее транспортное средство занимает эту одну позицию раньше обучающего объекта;
обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения, и что обучающий объект занимает эту одну позицию раньше обучающего транспортного средства;
обучающее транспортное средство и обучающий объект после целевого момента времени не занимают одну позицию на местности обучения (например, примеры «отсутствия взаимодействия» для целей обучения); и
обучающий объект занимает определенную позицию на местности обучения в будущий момент времени, и что обучающее транспортное средство занимает другую определенную позицию на местности обучения в будущий момент времени, а расстояние между упомянутой определенной позицией и другой определенной позицией ниже порогового безопасного расстояния.
[00092] Таким образом, в примере, показанном на ФИГ. 4, безасессорная метка, которую система будет генерировать на основе состояний обучающего транспортного средства 410 и обучающего объекта 412 на местности 402 обучения в момент t1 времени (и, возможно, в последующие моменты времени), будет означать, что обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения, и что обучающее транспортное средство занимает эту одну позицию раньше обучающего объекта. В некоторых реализациях эта безасессорная метка может быть представлена вектором, при этом каждое из предопределенных будущих состояний представляется одним значением в векторе. Например, безасессорная метка для примера, показанного на ФИГ. 4, может быть представлена вектором (1, 0, 0, 0).
[00093] Следует понимать, что, хотя сценарий, показанный на ФИГ. 4, основан на пересечении обучающим транспортным средством и обучающим объектом перекрестка, это сделано лишь для иллюстрации. Для обучения алгоритма машинного обучения прогнозированию параметра намерения объекта на местности потребуются многие другие сценарии и наборы обучающих данных с безасессорными метками. Например, может существовать множество сценариев обучения, в которых обучающее транспортное средство и обучающий объект движутся рядом друг с другом по разным полосам движения на одной и той же дороге, при этом обучающий объект и/или обучающее транспортное средство выполняет смену полосы движения. Также могут использоваться многие другие сценарии обучения.
[00094] Обратимся теперь к ФИГ. 5, на которой описан способ обучения алгоритма 502 машинного обучения. Это обучение, как правило, происходит на сервере на основе сохраненных рабочих данных из многих прогонов обучения обучающего транспортного средства. Как показано на ФИГ. 5, элемент 504 обучающих данных отправляется в алгоритм 502 машинного обучения, который генерирует прогноз 506 параметра намерения обучающего объекта. Прогноз 506 затем сравнивается с безасессорной меткой 508, которая связана с элементом 504 обучающих данных (генерация которого описана выше), а различие между прогнозом 506 и безасессорной меткой 508 затем используется для обучения алгоритма 502 машинного обучения.
[00095] В некоторых реализациях элемент 504 обучающих данных может включать в себя набор 510 данных об обучающем транспортном средстве (тс), представляющий состояние обучающего транспортного средства в целевой момент времени и в ноль или более моментов времени до упомянутого целевого момента времени, набор 512 данных об обучающем объекте, представляющий состояние обучающего объекта в целевой момент времени и в ноль или более моментов времени до упомянутого целевого момента времени, и набор 514 данных о местности обучения, представляющий местность обучения в целевой момент времени и в ноль или более моментов времени до упомянутого целевого момента времени. В некоторых реализациях общий набор обучающих данных может включать в себя десятки тысяч, сотни тысяч или даже миллионов таких обучающих элементов и связанных с ними безасессорных меток. В некоторых реализациях настоящей технологии элемент 504 обучающих данных может включать в себя набор 510 данных об обучающем транспортном средстве, представляющий состояния обучающего транспортного средства в целевой момент времени и за 8 секунд до этого целевого момента времени.
[00096] Как обсуждалось выше, в некоторых реализациях безасессорная метка может быть представлена вектором, причем каждое значение в этом векторе представляет одно из предопределенного числа состояний обучающего транспортного средства и обучающего объекта в момент времени после целевого момента времени. Этот вектор представляет параметр намерения обучающего объекта. Точно так же в некоторых реализациях прогноз 506 может быть представлен аналогичным вектором, при этом каждое значение в этом векторе представляет прогнозируемую вероятность (обычно от нуля до единицы) для каждого из предопределенного числа состояний обучающего транспортного средства и обучающего объекта в момент времени после целевого момента времени (которые могут упоминаться в данном документе как «классы намерений»).
[00097] Алгоритм 502 машинного обучения может быть любым подходящим традиционным алгоритмом машинного обучения. Например, алгоритм машинного обучения может быть любым из различных традиционных алгоритмов машинного обучения, в том числе, но без ограничения, алгоритмы «глубокого обучения», другие типы нейронных сетей или «коннекционных» систем, деревья принятия решений, леса решений, байесовские сети или другие известные, или разработанные позднее алгоритмы машинного обучения, которые используют наборы обучающих данных (например, алгоритмы обучения с учителем или с частичным привлечением учителя). Способ, в котором прогноз 506, безасессорная метка 508 и/или разница между ними используется для обучения алгоритма 502 машинного обучения, будет меняться согласно используемому алгоритму машинного обучения.
[00098] После обучения алгоритма 502 машинного обучения информация, представляющая алгоритм машинного обучения, может быть отправлена на электронное устройство, связанное с беспилотным транспортным средством, такое как электронное устройство 210, описанное выше со ссылкой на ФИГ. 2. Затем алгоритм машинного обучения может использоваться для управления беспилотным транспортным средством.
Использование обученного алгоритма машинного обучения
[00099] ФИГ. 6 демонстрирует примерный сценарий для алгоритма машинного обучения, используемого в самоуправляемом транспортном средстве. Как и на ФИГ. 4, местность 602 включает в себя четырехсторонний перекресток или пересечение дорог. Беспилотное транспортное средство 610, включающее в себя обученный алгоритм машинного обучения, а также объект 612 приближаются к перекрестку. Беспилотное транспортное средство 610 использует датчики (не показаны) для определения своего собственного состояния и обнаруженного состояния объекта 612 при каждом тике и сохраняет по меньшей мере достаточное количество предыдущих данных, чтобы применить алгоритм машинного обучения для прогнозирования параметра намерения объекта на местности. Например, если алгоритм машинного обучения был обучен использовать данные из целевого момента времени и двух предыдущих тиков, то беспилотное транспортное средство 610 будет сохранять информацию о состоянии по меньшей мере трех самых последних тиках, поэтому алгоритм машинного обучения может применяться. В примере, показанном на ФИГ. 4, беспилотное транспортное средство 610 имеет данные о состоянии беспилотного транспортного средства 610 и о состоянии объекта 612 для по меньшей мере моментов t0, t-1, t-2 и t-3 времени. Датчики также обеспечивают информацию о местности 602. В некоторых реализациях эти данные о местности регистрируются на каждом тике. В некоторых реализациях данные о местности могут регистрироваться реже, чем данные о состоянии. В некоторых реализациях данные о местности могут включать в себя предопределенные картографические данные в дополнение к данным, обеспеченным датчиками на самоуправляемом транспортном средстве 610.
[000100] Данные о состоянии беспилотного транспортного средства 610 могут включать в себя информацию, например, позицию беспилотного транспортного средства 610 во время тика, а также другую информацию о состоянии беспилотного транспортного средства 610, такую как скорость, направление или угол поворота, состояние акселератора, состояние торможения, и другую информацию. Данные о состоянии объекта 612 могут включать в себя информацию датчика, указывающую позицию, а также другую воспринимаемую информацию о состоянии объекта 612, такую как скорость и направление объекта 612. Как обсуждалось выше со ссылкой на ФИГ. 4, текущее и прошлые состояния беспилотного транспортного средства 610 и объекта 612 могут быть использованы в некоторых реализациях для определения их траекторий или частей их таких траекторий, соответствующих временному интервалу предопределенной длительности до целевого момента времени.
[000101] На ФИГ. 6 точки 620, 622, 624 и 626 показывают позицию беспилотного транспортного средства 610 соответственно в моменты t0, t-1, t-2 и t-3 времени. Информация о состоянии беспилотного транспортного средства 610 в каждый из этих моментов времени и, возможно, в предыдущие моменты времени, формирует набор 640 данных во время использования (in-use) для беспилотного транспортного средства. Точки 630, 632, 634 и 636 показывают позицию объекта 612 соответственно в моменты t0, t-1, t-2 и t-3 времени. Информация о состоянии объекта 612 в каждый из этих моментов времени и, возможно, в предыдущие моменты времени, формирует набор 642 данных во время использования для объекта. Набор данных во время использования (не показан) для местности 602 также может быть сформирован в самоуправляемом транспортном средстве 610.
[000102] Эти наборы данных во время использования могут быть использованы обученным алгоритмом машинного обучения для генерирования прогнозного параметра намерения для объекта 612 на местности 602. Беспилотное транспортное средство 610 затем может предпринять действие, основанное на этом прогнозном параметре намерения.
[000103] ФИГ. 7 изображает генерирование прогнозного параметра намерения для объекта посредством обученного алгоритма 702 машинного обучения. Элемент 704 данных во время использования отправляется в обученный алгоритм 702 машинного обучения, который генерирует прогнозный параметр 706 намерения для объекта.
[000104] Элемент 704 данных во время использования включает в себя самые последние данные о состоянии беспилотного транспортного средства, о состоянии объекта и о местности. В некоторых реализациях элемент 704 данных во время использования может включать в себя набор 710 данных во время использования для беспилотного транспортного средства (тс), набор 712 данных во время использования для объекта и набор 714 данных во время использования для местности. Как обсуждалось выше, каждый из этих наборов данных во время использования может включать в себя данные для целевого момента времени, а также для нуля или более предыдущих моментов времени в зависимости от обученного алгоритма машинного обучения.
[000105] В некоторых реализациях прогнозный параметр 706 намерения может быть представлен вектором, при этом каждое значение в этом векторе представляет прогнозируемую вероятность (обычно от нуля до единицы) для каждого из предопределенного числа состояний беспилотного транспортного средства и объекта в момент времени после целевого момента времени (которые могут упоминаться в данном документе как «классы намерений»). Этот вектор обеспечивает прогноз намерения объекта в ближайшем будущем и может использоваться для определения действий, которые должны быть предприняты беспилотным транспортным средством, например, чтобы избежать столкновения или другого нежелательного события.
[000106] Обученный алгоритм 702 машинного обучения может быть любым подходящим традиционным алгоритмом машинного обучения, который был обучен как описано выше. Например, алгоритм машинного обучения может быть любым из различных традиционных алгоритмов машинного обучения, в том числе, но без ограничения, алгоритмы «глубокого обучения», другие типы нейронных сетей или «коннекционных» систем, деревья принятия решений, леса решений, байесовские сети или другие известные, или разработанные позднее алгоритмы машинного обучения.
Обзор способа обучения и использования алгоритма машинного обучения
[000107] Обратимся теперь к ФИГ. 8, на которой описана блок-схема 800 последовательности операций способа обучения алгоритма машинного обучения для прогнозирования параметра намерения объекта на местности в соответствии с настоящей технологией. Способ разделен на две фазы: фаза 850 обучения и фаза 852 использования. Фаза 850 обучения обычно выполняется сервером, в то время как фаза использования выполняется на электронном устройстве, связанном с беспилотным транспортным средством, таким как электронное устройство 210, как описано со ссылкой на ФИГ. 2.
[000108] В блоке 802 фазы 850 обучения сервер осуществляет доступ к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные включают в себя данные, указывающие местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения. Рабочие данные могли быть предварительно сохранены в хранилище, таком как запоминающее устройство или база данных.
[000109] В блоке 804 фазы 850 обучения сервер извлекает данные для целевого момента времени из рабочих данных. Извлекаемые данные указывают: местность обучения в целевой момент времени; целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени, и будущее состояние обучающего транспортного средства после целевого момента времени; и целевое состояние обучающего объекта, соответствующее целевому моменту времени, и будущее состояние обучающего объекта после целевого момента времени.
[000110] В некоторых реализациях сервер выбирает целевой момент времени в данных посредством идентификации определенного состояния обучающего транспортного средства и определенного состояния обучающего объекта в рабочих данных, которые связаны с одной позицией на местности обучения. Сервер затем может выбирать целевой момента времени в качестве предшествующего момента времени относительно определенного момента времени, связанного с определенным состоянием обучающего транспортного средства.
[000111] В некоторых реализациях извлечение данных для целевого момента времени из рабочих данных включает в себя извлечение данных, указывающих набор предыдущих состояний обучающего транспортного средства до целевого момента времени. Извлечение данных может также включать в себя извлечение набора предыдущих состояний обучающего объекта до целевого момента времени. В некоторых реализациях набором предыдущих состояний обучающего транспортного средства является часть траектории обучающего транспортного средства до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени. В некоторых реализациях набором предыдущих состояний обучающего объекта является часть траектории обучающего объекта до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени.
[000112] В некоторых реализациях извлечение данных включает в себя извлечение данных, указывающих набор будущих состояний обучающего транспортного средства после целевого момента времени, в том числе упомянутое будущее состояние обучающего транспортного средства, и набор будущих состояний обучающего объекта после целевого момента времени, в том числе упомянутое будущее состояние обучающего объекта. В некоторых реализациях набором будущих состояний обучающего транспортного средства является часть траектории обучающего транспортного средства после целевого момента времени, причем набор будущих состояний обучающего объекта является частью траектории обучающего объекта после целевого момента времени.
[000113] В блоке 806 фазы 850 обучения сервер генерирует обучающий набор для целевого момента времени для обучения алгоритма машинного обучения, причем обучающий набор имеет входную информацию и безасессорную метку. Входная информация включает в себя данные, указывающие местность обучения и состояния обучающего транспортного средства и обучающего объекта в целевой момент времени. Безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени.
[000114] В некоторых реализациях сервер генерирует безасессорную метку на основе данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта. В некоторых реализациях генерирование безасессорной метки может включать в себя определение того, что будущие состояния обучающего транспортного средства и обучающего объекта указывают по меньшей мере одно из: обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения и что обучающее транспортное средство занимает эту одну позицию раньше обучающего объекта; обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения и что обучающий объект занимает эту одну позицию раньше обучающего транспортного средства; обучающее транспортное средство и обучающий объект после целевого момента времени не занимают одну позицию на местности обучения; и обучающий объект занимает определенную позицию на местности обучения в будущий момент времени, и что обучающее транспортное средство занимает другую определенную позицию на местности обучения в будущий момент времени, а расстояние между упомянутой определенной позицией и другой определенной позицией ниже порогового безопасного расстояния.
[000115] В по меньшей мере некоторых вариантах осуществления следует отметить, что по меньшей мере некоторые обучающие примеры, сгенерированные сервером для обучения алгоритма машинного обучения, могут содержать примеры «отсутствия взаимодействия» между обучающим транспортным средством и обучающим объектом. В некоторых случаях, если в обучающих примерах есть только примеры «взаимодействия» между обучающим транспортным средством и обучающим объектом, алгоритм машинного обучения может прогнозировать параметры намерений, которые всегда указывают на некоторое взаимодействие между транспортным средством во время использования и объектом во время использования, а это может быть не так.
[000116] В блоке 808 фазы 850 обучения сервер обучает алгоритм машинного обучения на основе обучающего набора для прогнозирования, во время фазы использования, параметра намерения, указывающего намерение объекта на местности во время целевого момента времени использования. Алгоритм машинного обучения обучается основывать этот прогноз на данных, указывающих местность в целевой момент времени использования, состояние во время использования у беспилотного транспортного средства в целевой момент времени использования и состояние во время использования у объекта в целевой момент времени использования.
[000117] Блоки 802-808 могут повторяться до тех пор, пока точность прогнозов алгоритма машинного обучения не достигнет предопределенного достаточного уровня точности. Как только этот уровень точности прогноза достигнут, в блоке 810 фазы обучения сервер передает информацию, представляющую обученный алгоритм машинного обучения, на электронное устройство, связанное с беспилотным транспортным средством.
[000118] В блоке 812 фазы 852 использования электронное устройство, связанное с беспилотным транспортным средством, выполняет обученный алгоритм машинного обучения для генерирования параметра намерения объекта. Генерирование параметра намерения основано на данных, указывающих местность в целевой момент времени использования, состояние во время использования у беспилотного транспортного средства в целевой момент времени использования и состояние во время использования у объекта в целевой момент времени использования. В некоторых реализациях параметр намерения указывает вероятность того, что намерение объекта является одним из множества классов намерений, а алгоритм машинного обучения выполнен с возможностью классификации намерения объекта на множество классов намерений.
[000119] В блоке 814 фазы 852 использования электронное устройство инициирует работу беспилотного транспортного средства по меньшей мере частично на основе параметра намерения.
[000120] Модификации и улучшения вышеописанных реализаций настоящей технологии могут стать очевидными для специалистов в данной области техники. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Поэтому предполагается, что объем настоящей технологии ограничен лишь объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство управления беспилотным автомобилем | 2021 |
|
RU2805539C2 |
| СПОСОБЫ И ПРОЦЕССОРЫ ДЛЯ УПРАВЛЕНИЯ РУЛЕНИЕМ БЕСПИЛОТНЫМ АВТОМОБИЛЕМ | 2019 |
|
RU2751734C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СТЕПЕНИ УХУДШЕНИЯ ЛИДАРНЫХ ДАННЫХ | 2021 |
|
RU2826476C1 |
| Способ и система для определения траектории автономного транспортного средства | 2023 |
|
RU2821107C1 |
| СПОСОБЫ И СЕРВЕРЫ ДЛЯ ГЕНЕРИРОВАНИЯ ПРОГНОЗНОЙ ОЦЕНКИ АЛГОРИТМОМ МАШИННОГО ОБУЧЕНИЯ | 2022 |
|
RU2831623C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2021 |
|
RU2767826C1 |
| Способ прогнозирования траектории агента вблизи беспилотного транспортного средства на основании ранжирования | 2021 |
|
RU2800694C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| Способ и сервер для ранжирования цифровых документов в ответ на запрос | 2020 |
|
RU2818279C2 |
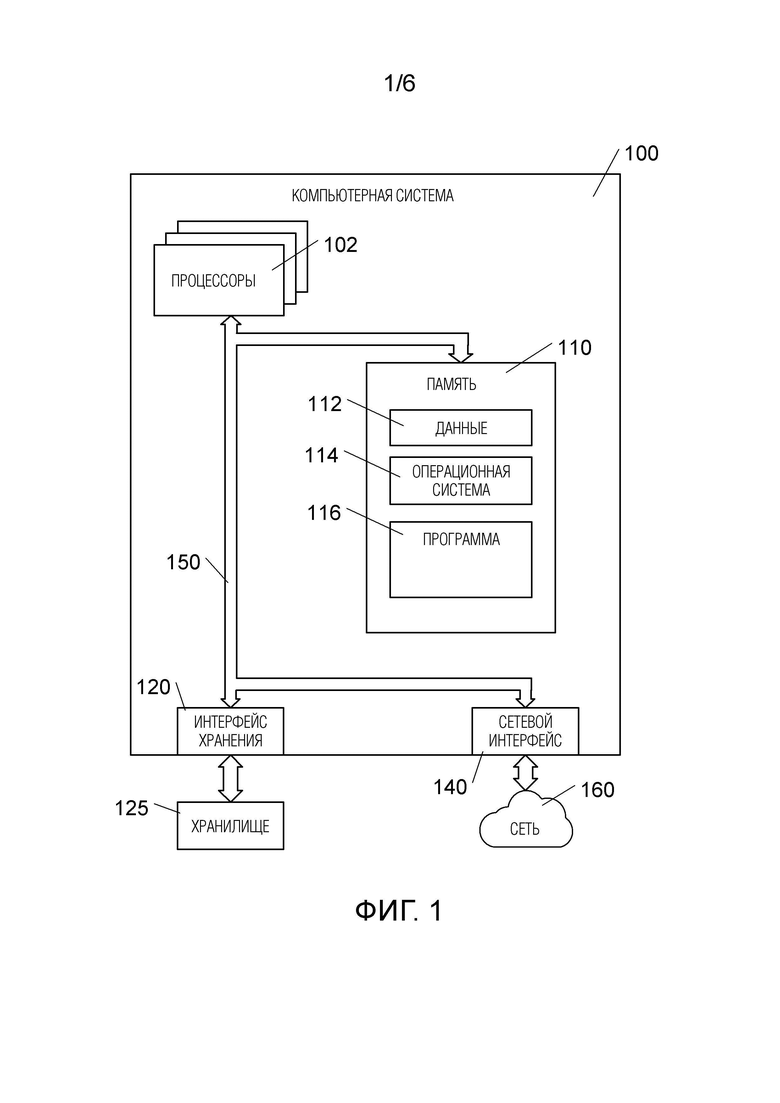
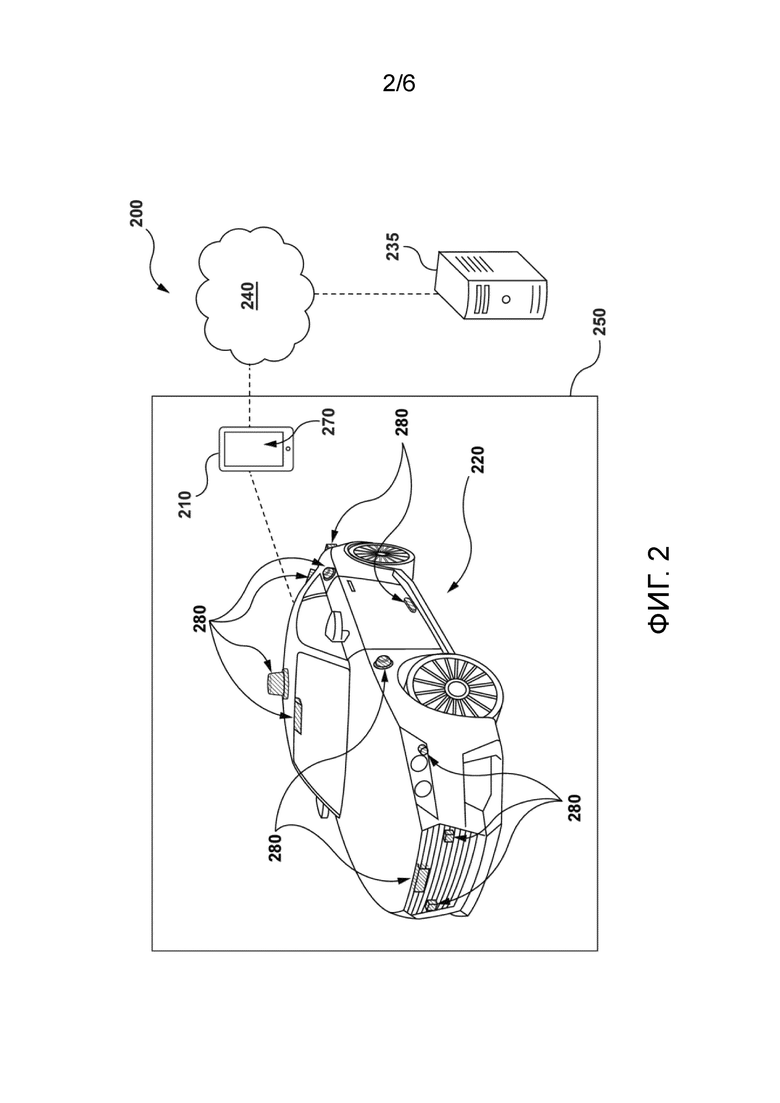
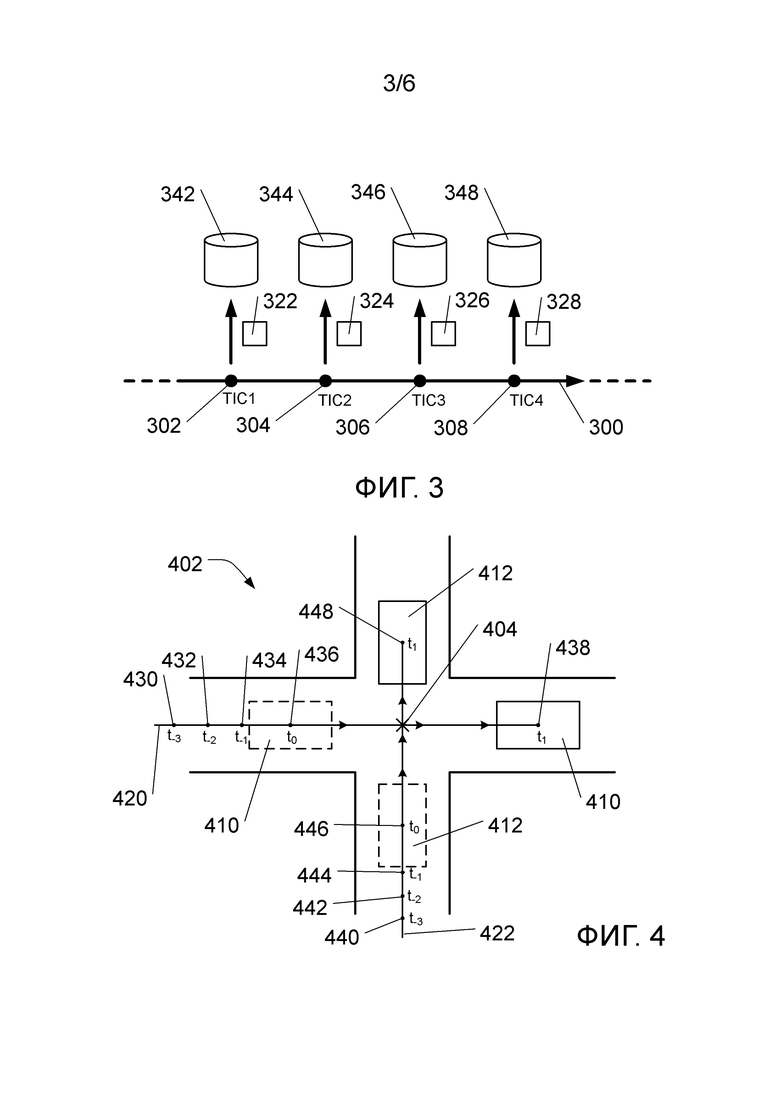
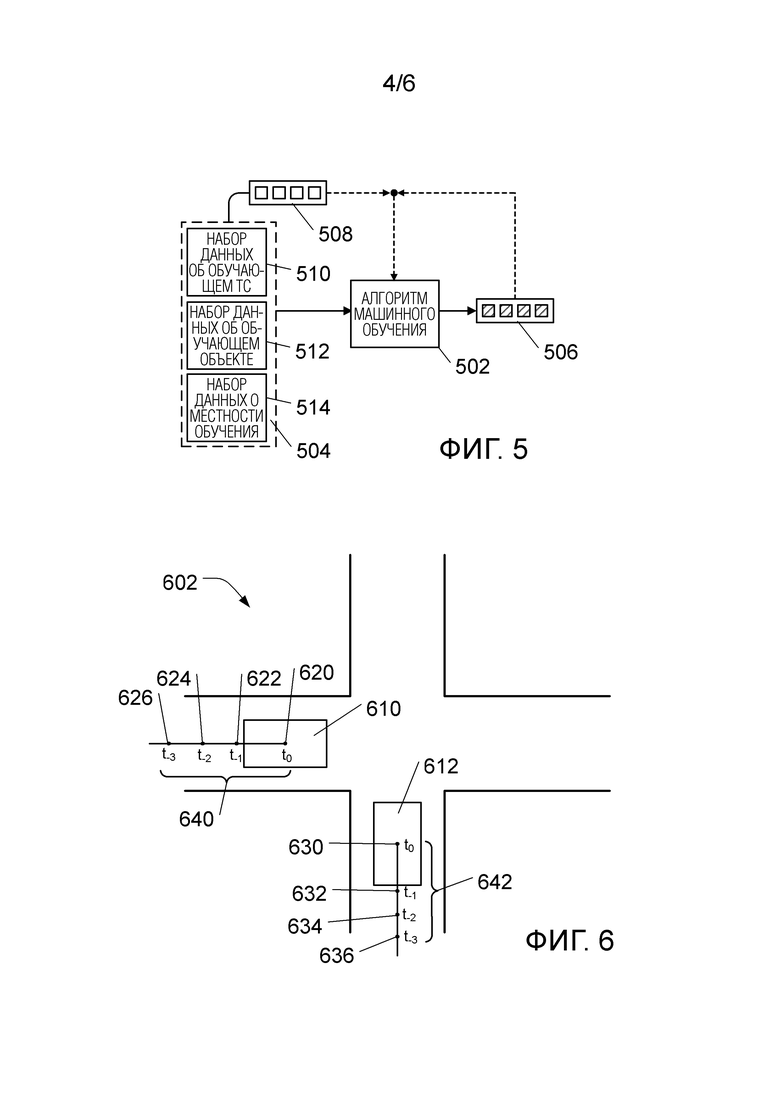
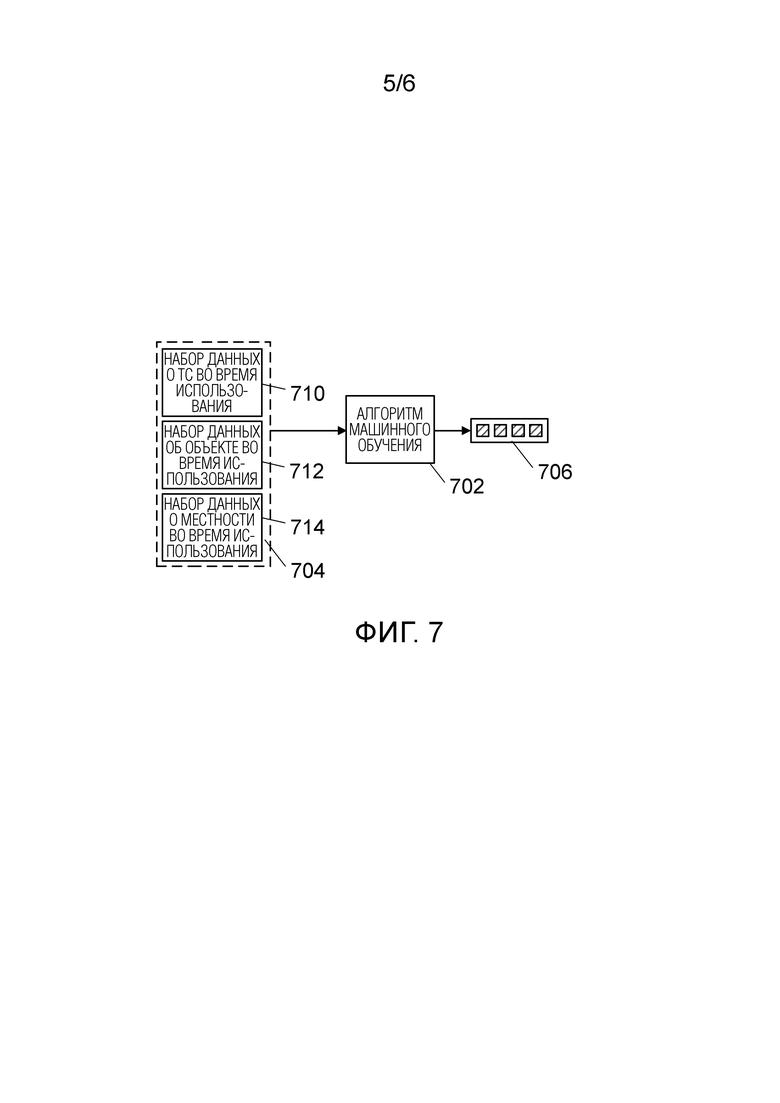
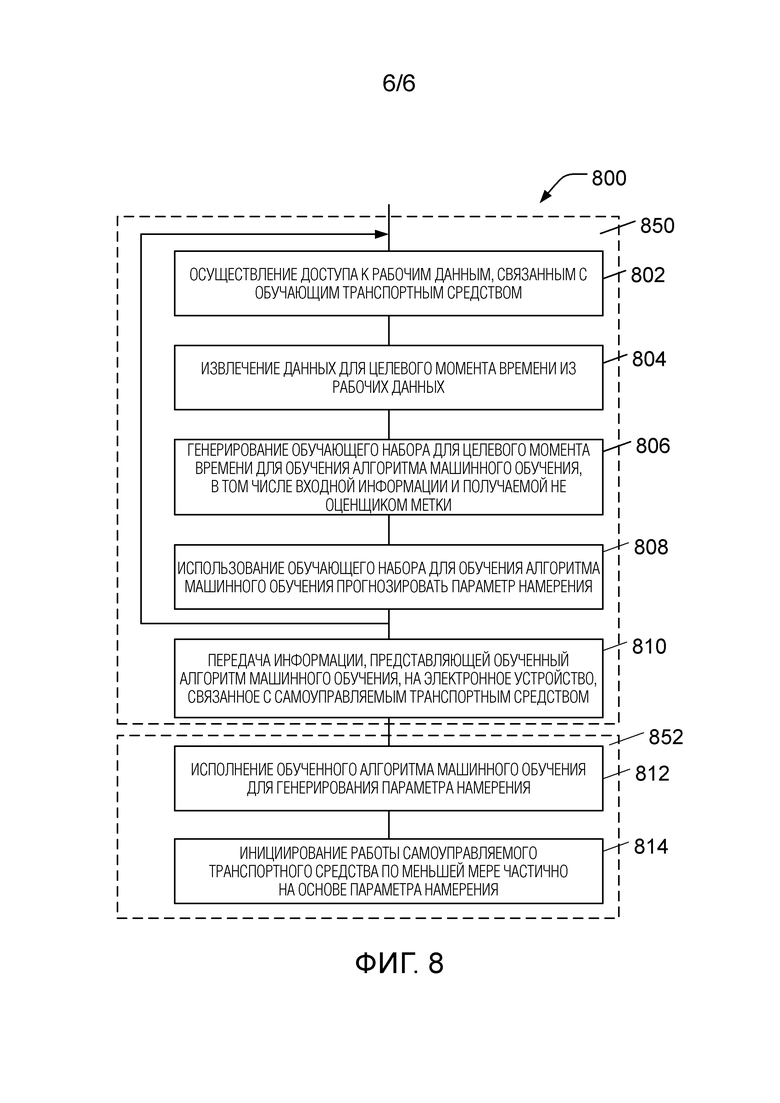
Группа изобретений относится к способу обучения алгоритма машинного обучения для прогнозирования параметра намерения для объекта на местности для использования в беспилотных транспортных средствах и способу эксплуатации беспилотного транспортного средства. Беспилотное транспортное средство движется по местности вблизи объекта. Способ содержит: осуществление доступа сервером к рабочим данным, связанным с обучающим транспортным средством; генерирование сервером обучающего набора для обучения алгоритма машинного обучения. Рабочие данные включают в себя данные, указывающие: местность обучения, состояния обучающего транспортного средства и состояния обучающего объекта на местности обучения. Обучающий набор имеет входную информацию и безасессорную метку. Входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта. Безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта на местности обучения в целевой момент времени. Достигается улучшение работы беспилотных или полуавтономных транспортных средств. 3 н. и 17 з.п. ф-лы, 8 ил.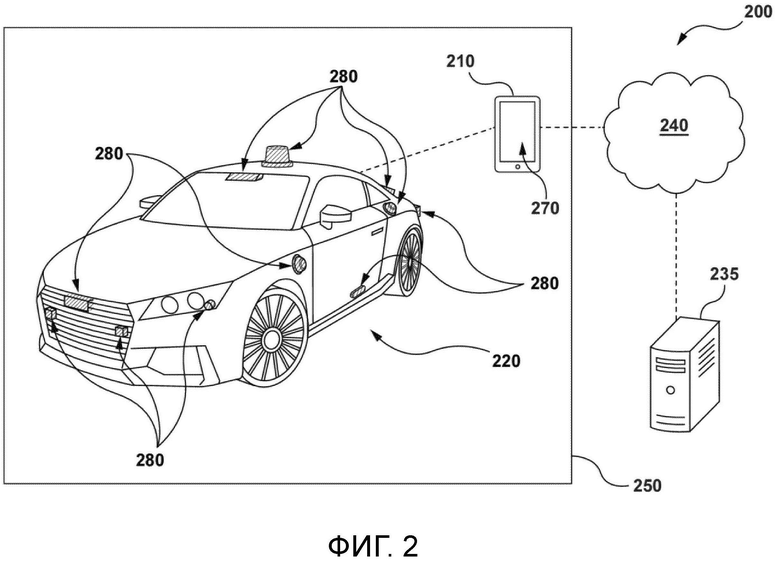
1. Способ обучения алгоритма машинного обучения для прогнозирования параметра намерения для объекта на местности для использования в беспилотных транспортных средствах, причем беспилотное транспортное средство движется по местности вблизи упомянутого объекта, причем способ выполняется сервером и содержит:
осуществление доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище и включают в себя данные, указывающие:
местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения;
для целевого момента времени в рабочих данных:
извлечение из рабочих данных посредством сервера данных, указывающих:
местность обучения в целевой момент времени,
целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени, и будущее состояние обучающего транспортного средства после целевого момента времени,
целевое состояние обучающего объекта, соответствующее целевому моменту времени, и будущее состояние обучающего объекта после целевого момента времени;
генерирование сервером обучающего набора для обучения алгоритма машинного обучения, причем обучающий набор имеет входную информацию и безасессорную метку,
причем входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта,
безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта, причем безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени; и
обучение сервером алгоритма машинного обучения на основе обучающего набора для прогнозирования, во время фазы использования:
параметра намерения, указывающего намерение объекта на местности во время целевого момента времени использования, на основе данных, указывающих (i) местность в целевой момент времени использования, (ii) состояние использования беспилотного транспортного средства в целевой момент времени использования и (iii) состояние использования упомянутого объекта.
2. Способ по п. 1, в котором извлечение содержит:
извлечение сервером данных, указывающих (i) набор предыдущих состояний обучающего транспортного средства до целевого момента времени и (ii) набор предыдущих состояний обучающего объекта до целевого момента времени,
причем входная информация дополнительно включает в себя данные, указывающие наборы предыдущих состояний обучающего транспортного средства и обучающего объекта.
3. Способ по п. 2, в котором набором предыдущих состояний обучающего транспортного средства является часть траектории обучающего транспортного средства до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени.
4. Способ по п. 2, в котором набором предыдущих состояний обучающего объекта является часть траектории обучающего объекта до целевого момента времени, причем часть траектории соответствует временному интервалу предопределенной длительности до целевого момента времени.
5. Способ по п. 1, в котором извлечение содержит:
извлечение сервером данных, указывающих (i) набор будущих состояний обучающего транспортного средства после целевого момента времени, в том числе упомянутое будущее состояние обучающего транспортного средства, и (ii) набор будущих состояний обучающего объекта после целевого момента времени, в том числе упомянутое будущее состояние обучающего объекта,
безасессорная метка основана на наборах будущих состояний обучающего транспортного средства и обучающего объекта.
6. Способ по п. 5, в котором набор будущих состояний обучающего транспортного средства является частью траектории обучающего транспортного средства после целевого момента времени и в котором набор будущих состояний обучающего объекта является частью другой траектории обучающего объекта после целевого момента времени.
7. Способ по п. 1, в котором способ дополнительно содержит выбор сервером целевого момента времени в рабочих данных, причем выбор содержит:
идентификацию сервером определенного состояния обучающего транспортного средства и определенного состояния обучающего объекта в рабочих данных, которые связаны с одной и той же позицией на местности обучения; и
выбор сервером целевого момента времени в качестве предшествующего момента времени относительно определенного момента времени, связанного с определенным состоянием обучающего транспортного средства.
8. Способ по п. 1, при этом способ содержит генерирование сервером безасессорной метки на основе данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта, причем генерирование безасессорной метки включает в себя:
определение сервером того, что будущие состояния обучающего транспортного средства и обучающего объекта указывают по меньшей мере одно из следующего:
обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения, и что обучающее транспортное средство занимает эту одну позицию раньше обучающего объекта;
обучающее транспортное средство и обучающий объект после целевого момента времени занимают одну позицию на местности обучения и что обучающий объект занимает эту одну позицию раньше обучающего транспортного средства;
обучающее транспортное средство и обучающий объект после целевого момента времени не занимают одну позицию на местности обучения; и
обучающий объект занимает определенную позицию на местности обучения в будущий момент времени, и что обучающее транспортное средство занимает другую определенную позицию на местности обучения в будущий момент времени, а расстояние между упомянутой определенной позицией и другой определенной позицией ниже порогового безопасного расстояния.
9. Способ по п. 1, при этом способ дополнительно содержит:
передачу сервером информации, представляющей алгоритм машинного обучения, на электронное устройство, связанное с беспилотным транспортным средством;
в целевой момент времени использования, во время работы беспилотного транспортного средства:
выполнение электронным устройством алгоритма машинного обучения для генерирования параметра намерения; и
инициирование электронным устройством работы беспилотного транспортного средства по меньшей мере частично на основе параметра намерения.
10. Способ по п. 1, в котором алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений.
11. Способ по п. 1, в котором обучающее транспортное средство является беспилотным транспортным средством.
12. Способ по п. 1, в котором объект является движущимся объектом.
13. Способ по п. 1, в котором объект является по меньшей мере одним из транспортного средства и пешехода.
14. Способ по п. 1, в котором местность обучения содержит участок дороги обучения и в котором данные о местности обучения представляют собой изображение вида с высоты птичьего полета для участка дороги обучения в целевой момент времени.
15. Способ эксплуатации беспилотного транспортного средства, содержащий:
прием на электронном устройстве, связанном с беспилотным транспортным средством, данных от датчика, связанного с беспилотным транспортным средством, причем данные указывают состояние беспилотного транспортного средства, состояние объекта вблизи беспилотного транспортного средства и местность, по которой движется беспилотное транспортное средство;
предоставление упомянутых данных в алгоритм машинного обучения на электронном устройстве, причем алгоритм машинного обучения определяет параметр намерения, указывающий намерение объекта на местности во время целевого момента времени; и
инициирование электронным устройством работы беспилотного транспортного средства по меньшей мере частично на основе параметра намерения;
при этом алгоритм машинного обучения был обучен с использованием набора обучающих данных, сгенерированного посредством, по меньшей мере частично:
осуществления доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище и включают в себя данные, указывающие:
местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения;
для целевого момента времени обучения в рабочих данных:
извлечения из рабочих данных посредством сервера данных, указывающих:
местность обучения в целевой момент времени обучения,
целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени обучения, и будущее состояние обучающего транспортного средства после целевого момента времени обучения,
целевое состояние обучающего объекта, соответствующее целевому моменту времени обучения, и будущее состояние обучающего объекта после целевого момента времени обучения;
генерирования сервером обучающего набора данных для обучения алгоритма машинного обучения, причем обучающий набор данных имеет входную информацию и безасессорную метку,
причем входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта,
безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта, причем безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени обучения.
16. Способ по п. 15, в котором алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений.
17. Способ по п. 15, дополнительно содержащий прием на электронном устройстве информации, представляющей алгоритм машинного обучения, от сервера.
18. Беспилотное транспортное средство, содержащее:
по меньшей мере один датчик, выполненный с возможностью сбора данных датчика, указывающих состояние беспилотного транспортного средства, состояние объекта вблизи беспилотного транспортного средства и местность, по которой движется беспилотное транспортное средство;
электронное устройство, включающее в себя процессор и память, причем память хранит запрограммированные инструкции, которые при выполнении процессором побуждают электронное устройство:
предоставлять данные датчика в алгоритм машинного обучения, выполняемый на процессоре, причем алгоритм машинного обучения определяет параметр намерения, указывающий намерение объекта на местности во время целевого момента времени; и
инициировать работу беспилотного транспортного средства по меньшей мере частично на основе параметра намерения;
при этом алгоритм машинного обучения содержит значения, хранящиеся в памяти, которые были определены путем обучения алгоритма машинного обучения с использованием набора обучающих данных, сгенерированного посредством, по меньшей мере частично:
осуществления доступа сервером к рабочим данным, связанным с обучающим транспортным средством, причем рабочие данные ранее были сохранены в хранилище и включают в себя данные, указывающие:
местность обучения, состояния обучающего транспортного средства на местности обучения и состояния обучающего объекта на местности обучения;
для целевого момента времени обучения в рабочих данных:
извлечения из рабочих данных посредством сервера данных, указывающих:
местность обучения в целевой момент времени обучения,
целевое состояние обучающего транспортного средства, соответствующее целевому моменту времени обучения, и будущее состояние обучающего транспортного средства после целевого момента времени обучения,
целевое состояние обучающего объекта, соответствующее целевому моменту времени обучения, и будущее состояние обучающего объекта после целевого момента времени обучения;
генерирования сервером обучающего набора данных для обучения алгоритма машинного обучения, причем обучающий набор данных имеет входную информацию и безасессорную метку,
причем входная информация включает в себя данные, указывающие местность обучения и целевые состояния обучающего транспортного средства и обучающего объекта,
безасессорная метка основана на данных, указывающих будущие состояния обучающего транспортного средства и обучающего объекта, причем безасессорная метка указывает намерение обучающего объекта на местности обучения в целевой момент времени обучения.
19. Беспилотное транспортное средство по п. 18, в котором алгоритм машинного обучения выполнен с возможностью классификации намерения объекта, причем параметр намерения указывает вероятность того, что намерением объекта является один из множества классов намерений.
20. Беспилотное транспортное средство по п. 18, в котором память дополнительно хранит запрограммированные инструкции, которые при выполнении процессором побуждают электронное устройство принимать информацию, представляющую алгоритм машинного обучения, от сервера.
| US 2019129436 A1, 02.05.2019 | |||
| WO 2017021753 A1, 09.02.2017 | |||
| СПОСОБЫ И СИСТЕМЫ ПРОГНОЗИРОВАНИЯ УСЛОВИЙ ВОЖДЕНИЯ | 2016 |
|
RU2629875C1 |
| US 2017053169 A1, 23.02.2017 | |||
| US 7363309 B1, 22.04.2008. | |||
