Область техники
[0001] Настоящая технология в целом относится к беспилотному автомобилю; и, в частности, к способу и устройству для управления беспилотным автомобилем.
Уровень техники
[0001] Несколько компьютерных навигационных систем, которые выполнены с возможностью помощи в навигации и/или управлении транспортным средством, были предложены и реализованы в предшествующем уровне техники. Эти системы варьируются от более простых решений на основе картографической локализации, т.е. Использования компьютерной системы для помощи водителю в навигации по маршруту от начальной точки до конечной точки; к более сложным - компьютерные и/или автономные от водителя системы вождения.
[0002] Некоторые из этих систем реализованы как так называемые системы «круиз-контроля» (системы автоматического поддержания скорости). В этих системах компьютерная система, установленная на транспортных средствах, поддерживает скорость транспортного средства, установленную пользователем. Некоторые системы круиз-контроля реализуют систему «интеллектуального управления расстоянием», посредством которой пользователь может установить расстояние до потенциального автомобиля впереди (например, выбрать значение, выраженное в количестве транспортных средств), а компьютерная система регулирует скорость транспортного средства, по меньшей мере частично, на основе транспортного средства, приближающегося к потенциальному транспортному средству впереди на заранее определенное расстояние. Некоторые из систем круиз-контроля дополнительно оснащены системой контроля столкновений, которая при обнаружении транспортного средства (или другого препятствия) перед движущимся транспортным средством замедляет или останавливает транспортное средство.
[0003] Некоторые из более совершенных систем обеспечивают полностью автономное вождение транспортного средства без прямого управления со стороны оператора (т.е. водителя), так называемые беспилотные автомобили (SDC). Данный SDC включает в себя компьютерные системы, которые могут предписывать SDC ускоряться, тормозить, останавливаться, менять полосу движения и самостоятельно парковаться.
[0004] Безопасная электронная система может потребовать планирования плавной, а также безопасной траектории для SDC с учетом окружения. Окружение SDC может быть очень динамичным, поскольку оно может включать в себя объекты (например, другие транспортные средства, включая другие двухколесные, четырехколесные или многоколесные транспортные средства, человека, идущего по дороге, и т.п.), которые могут уже находиться в движения или начинают двигаться, когда они находятся рядом с SDC.
[0005] Например, CN 111332298 A раскрывает способ, устройство и оборудование для определения доступной для вождения области и носитель информации, и относится к области автоматического вождения. В соответствии с конкретной схемой реализации, способ применяется к электронному оборудованию, сенсорная система переносится на целевом транспортном средстве, электронное оборудование взаимодействует с сенсорной системой. Способ содержит этапы, на которых собираются данные среды текущего кадра, собранные сенсорной системой целевого транспортного средства; если определено, что соседняя полоса движения существует для текущей полосы движения целевого транспортного средства, в соответствии с данными среды текущего кадра, извлекают данные признаков среды текущего кадра на соседней полосе движения; прогнозируют опасность текущего кадра соседней полосы движения в соответствии с характеристическими данными среды текущего кадра, чтобы получить начальное значение опасности текущего кадра; вычисляют окончательное значение опасности текущего кадра согласно начальному значению опасности текущего кадра и соответствующему опорному значению опасности предыдущего кадра; и вычисляют доступную для вождения область текущего кадра соседней полосы движения в соответствии с окончательным значением опасности текущего кадра. Следовательно, целевое транспортное средство не может сильно сбивать направление, и устойчивость целевого транспортного средства и опыт вождения пользователя улучшаются.
[0006] «US 2020/0310428 A1» раскрывает способ смены полосы движения, устройство для беспилотного транспортного средства и компьютерно-читаем носитель данных. Способ смены полосы движения включает в себя: определение возможных полос движения, на которые должна выполняться смена полосы движения, на основе намерения движения основного транспортного средства; проверку возможных полос движения на основе условий смены полос движения для возможных полос движения; выбор из проверенных возможных полос движения целевой полосы движения, на которую должна быть произведена смена полосы движения основного транспортного средства; определение того, является ли смена полосы движения основного транспортного средства с текущей полосы движения на целевую полосу движения безопасной; и выполнение смены полосы движения, если смена полосы движения определена как безопасная.
[0007] В US 10,163,353 B2 раскрыта система управления, которая адаптирована для применения в транспортном средстве и предназначена для обнаружения следующих транспортных средств на основе данных об окружении, которые получены от одного или нескольких сенсоров окружающей среды, расположенных на транспортном средстве. Датчики окружающей среды адаптированы для обеспечения электронного контроллера системы управления данными об окружении, которые отражают область впереди, сбоку рядом и/или позади транспортного средства. Система управления по меньшей мере адаптирована и предназначена для обнаружения одного или нескольких других транспортных средств, участвующих в движении позади собственного транспортного средства, с помощью сенсоров окружающей среды. Обнаруживается полоса движения, связанная с каждым другим транспортным средством, по которой едет(ут) другое(ие) транспортное(ые) средство(а). Определяется плотность дорожного движения собственной полосы движения и/или по меньшей мере одной соседней полосы движения другим транспортным(и) средством(ами). На основе определенной плотности дорожного движения (i) выводится указание безопасной или небезопасной смены полосы движения на конкретную из по меньшей мере одной соседней полосы движения и/или (ii) автономная смена полосы движения на конкретную из по меньшей мере одной соседней полосы движения осуществляется собственным транспортным средством, если упомянутая определенная плотность дорожного движения позволяет безопасно осуществить смену полосы движения.
[0008] В патенте США 10,513,261 В2 раскрыт способ определения потенциальной опасности смены полосы движения собственного транспортного средства с текущей используемой полосы движения на соседнюю полосу движения, оценивается дальность обнаружения во внешнем пространстве контролируемого собственного транспортного средства и влияние объектов, идентифицированных в диапазоне обнаружения, на потенциальную опасность, и на основе положений и скоростей внутренних других транспортных средств, идентифицированных в диапазоне обнаружения, определяется, могут ли внешние другие транспортные средства, расположенные за пределами диапазона обнаружения, достичь целевой области в которой находится собственное транспортное средство после предполагаемой смены полосы движения. Способ по меньшей мере частично автоматизированного управления собственным транспортным средством, в котором в случае намеченной смены полосы движения оценивается потенциальная опасность этой смены полосы движения, и смена полосы движения предотвращается, если другие внешние транспортные средства могут достичь целевой области.
[0009] Одной из технических проблем при реализации вышеупомянутых электронных систем является выполнение плавного, а также безопасного маневра при предотвращении любого столкновения SDC с другими объектами.
Сущность изобретения
[00010] Задачей настоящей технологии является устранение по меньшей мере некоторых неудобств, имеющихся в предшествующем уровне техники. Варианты осуществления настоящей технологии могут обеспечивать и/или расширять объем подходов к способам достижения целей и задач настоящей технологии.
[00011] Беспилотный автомобиль (SDC) обычно оснащен электронным устройством и различными датчиками. Например, электронное устройство может быть выполнено с возможностью приема и обработки данных о полосах движения на участке дороги, по которому движется SDC, например, данных, указывающих геометрию, форму и границы полос движения. Кроме того, электронное устройство может быть выполнено с возможностью приема и обработки данных об объектах в окружении SDC, таких как, например, данные, указывающие на типы объектов, перемещение объектов и геометрию объектов.
[00012] Разработчики настоящей технологии осознали, что, когда SDC работает на участке дороги, SDC может потребовать выполнения различных маневров для смены полосы движения. Траектория, используемая SDC при выполнении маневра по смене полосы движения, должна быть безопасной, чтобы избежать любого столкновения SDC с другими объектами. Кроме того, траектория должна обеспечивать плавный и комфортный маневр.
[00013] Разработчики настоящей технологии имеют электронное устройство и способ, выполняемый на электронном устройстве, для определения траектории, которая является безопасной, а также обеспечивает плавное и удобное маневрирование. Для этого электронное устройство может генерировать потенциальные траектории на основе обработанных данных о полосах движения и объектах в окружении SDC. Электронное устройство может независимо ранжировать и классифицировать потенциальные траектории на основе оценок ранжирования и оценок безопасности. Оценки ранжирования могут быть связаны со сходством прогнозируемой траектории с эталонной траекторией, и при этом эталонная траектория может быть вручную выполнена человеком-экспертом. В некоторых примерах эталонная траектория может обеспечить плавный и удобный маневр. Оценки безопасности могут указывать на то, безопасна ли соответствующая траектория.
[00014] Электронное устройство может идентифицировать лучшую траекторию на основе оценок ранжирования и самую безопасную траекторию на основе оценки безопасности. В случае, если лучшая траектория и самая безопасная траектория совпадают с потенциальной траекторией, электронное устройство может предписывать SDC выполнить маневр в соответствии с той же потенциальной траекторией. Если лучшая траектория и самая безопасная траектория не совпадают с потенциальной траекторией, электронное устройство может предписывать SDC выполнить маневр в соответствии с самой безопасной траекторией. Кроме того, если лучшая траектория и самая безопасная траектория не совпадают с потенциальной траекторией, электронное устройство может выполнять другие действия, такие как включение визуального индикатора SDC для отображения намерения выполнить маневр по смене полосы движения.
[00015] В первом широком аспекте настоящей технологии предоставляется способ управления беспилотным автомобилем (SDC) на участке дороги, при этом сенсорная система устанавливается на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем способ включает в себя этапы, на которых: в данный момент времени во время работы SDC на участке дороги: генерируют с помощью электронного устройства первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги, соответственно; ранжируют с помощью электронного устройства с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию, при этом ранжирующий MLA обучен прогнозировать (предсказывать) оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией; классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию, причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет; идентифицируют с помощью электронного устройства лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности; предписывают с помощью электронного устройства SDC выполнять первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией; и предписывают с помощью электронного устройства SDC выполнять второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией.
[00016] В некоторых вариантах осуществления способа ранжирующий MLA представляет собой алгоритм попарного ранжирования и обучен на основе первого набора обучающих данных, первый набор обучающих данных включает в себя: эталонную траекторию, являющуюся траекторией для обучения, вручную выполняемой человеком-экспертом, двигающимся в SDC на участке дороги для обучения в момент времени обучения; первую прогнозируемую траекторию для обучения и вторую прогнозируемую траекторию для обучения, сгенерированные электронным устройством для SDC для участка дороги для обучения в момент времени обучения; и ранжирующий MLA обучен на первом наборе обучающих данных для ранжирования первой прогнозируемой траектории для обучения и второй прогнозируемой траектории для обучения для участка дороги для обучения на основе соответствующего сходства с эталонной траекторией.
[00017] В некоторых вариантах осуществления способа классифицирующий MLA обучен на основе второго набора обучающих данных, причем второй набор обучающих данных содержит: траекторию для обучения, сгенерированную с помощью электронного устройства SDC на участке дороги для обучения во время момента времени обучения; метку, указывающую по меньшей мере на одно из неявных и явных вводов человека-эксперта, движущегося в SDC на участке дороги для обучения во время момента времени обучения.
[00018] В некоторых вариантах осуществления способа классифицирующий MLA представляет собой алгоритм на основе дерева решений.
[00019] В некоторых вариантах осуществления способа участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, и при этом: если и лучшая траектория, и самая безопасная траектория являются первой потенциальной траекторией, первое действие - попытка выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории; если и лучшая траектория, и самая безопасная траектория являются второй потенциальной траекторией, первое действие - попытаться выполнить потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
[00020] В некоторых вариантах осуществления способа участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, и при этом: если лучшая траектория является первой потенциальной траекторией и самая безопасная траектория является второй потенциальной траекторией, второе действие - включить визуальный индикатор SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после заданного момента времени.
[00021] В некоторых вариантах осуществления способа участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, и при этом: если лучшей траекторией является вторая потенциальная траектория и самая безопасная траектория является первой потенциальной траекторией, второе действие - попытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
[00022] В некоторых вариантах осуществления способа способ дополнительно включает в себя этапы, на которых: в другой заданный момент времени после заданного момента времени: идентифицируют с помощью электронного устройства новую лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории, а также новую самую безопасную траекторию среди первой и второй потенциальных траекторий на основе комбинации соответствующих новых оценок ранжирования и новых оценок безопасности; в ответ на новую лучшую траекторию и новую самую безопасную траекторию, которые являются первой потенциальной траекторией, предписывают с помощью электронного устройства SDC выполнять потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
[00023] Во втором широком аспекте настоящей технологии предоставляется способ управления беспилотным автомобилем (SDC) на участке дороги, при этом сенсорная система устанавливается на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем способ включает в себя этапы, на которых: в данный момент времени во время работы SDC на участке дороги: ранжируют с помощью электронного устройства с использованием ранжирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию, причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией, без учета безопасности соответствующей потенциальной траектории; классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию, причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет; предписывают с помощью электронного устройства SDC выполнять действие на основе комбинации оценок ранжирования и оценок безопасности для первой потенциальной траектории и второй потенциальной траектории.
[00024] В некоторых вариантах осуществления способа классификация первой и второй потенциальных траекторий выполняется параллельно с ранжированием первой потенциальной траектории и второй потенциальной траектории.
[00025] В некоторых вариантах осуществления способа классификация первой и второй потенциальных траекторий выполняется независимо от ранжирования первой потенциальной траектории и второй потенциальной траектории.
[00026] В некоторых вариантах осуществления способа участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения в ответ на определение с помощью электронного устройства, что первая потенциальная траектория ранжируется выше второй потенциальной траектории и что первая траектория безопасна, причем предписывание включает в себя этап, на котором: предписывают с помощью электронного устройства SDC пытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
[00027] В третьем широком аспекте настоящей технологии предоставляется электронное устройство для управления беспилотным автомобилем (SDC) на участке дороги, при этом на SDC устанавливается сенсорная система для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем электронное устройство выполнено с возможностью: в данный момент времени во время работы SDC на участке дороги: генерировать первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги, соответственно; ранжировать с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию, причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией; классифицировать с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию, причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет; идентифицировать лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности; предписывать SDC выполнить первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией; и предписывать SDC выполнить второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией.
[00028] В некоторых вариантах осуществления электронного устройства ранжирующий MLA представляет собой алгоритм попарного ранжирования и обучен на основе первого набора обучающих данных, причем первый набор обучающих данных включает в себя: эталонную траекторию, являющуюся траекторией для обучения, вручную выполняемой человеком-экспертом, двигающимся в SDC на участке дороги для обучения в момент времени обучения; и первую прогнозируемую траекторию для обучения и вторую прогнозируемую траекторию для обучения, сгенерированные электронным устройством для SDC для участка дороги для обучения в момент времени обучения; и ранжирующий MLA обучен на первом наборе обучающих данных для ранжирования первой прогнозируемой траектории для обучения и второй прогнозируемой траектории для обучения на основе сходства между (i) первой прогнозируемой траекторией для обучения и второй прогнозируемой траекторией для обучения и (ii) эталонной траекторией.
[00029] В некоторых вариантах осуществления электронного устройства классифицирующий MLA обучен на основе второго набора обучающих данных, причем второй набор обучающих данных содержит: траекторию для обучения, сгенерированную электронным устройством SDC на участке дороги для обучения во время момента времени обучения; метку, указывающую по меньшей мере на одно из неявных и явных вводов человека-эксперта, двигающегося в SDC на участке дороги для обучения во время момента времени обучения.
[00030] В некоторых вариантах осуществления электронного устройства классифицирующий MLA представляет собой алгоритм на основе дерева решений.
[00031] В некоторых вариантах осуществления электронного устройства участок дороги имеет две полосы движения, и первая потенциальная траектория включает в себя потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, при этом: если и лучшая траектория, и самая безопасная траектория являются первой потенциальной траекторией, первое действие - попытка выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории; если и лучшая траектория, и самая безопасная траектория являются второй потенциальной траекторией, первое действие - попытаться выполнить потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
[00032] В некоторых вариантах осуществления электронного устройства участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, и при этом: если лучшая траектория является первой потенциальной траекторией и самая безопасная траектория является второй потенциальной траекторией, второе действие - включить визуальный индикатор SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после заданного момента времени.
[00033] В некоторых вариантах осуществления электронного устройства участок дороги имеет две полосы движения, и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения, и при этом: если лучшая траектория является второй потенциальной траекторией и самая безопасная траектория является первой потенциальной траекторией, второе действие - попытка выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
[00034] В некоторых вариантах осуществления электронного устройства электронное устройство дополнительно выполнено с возможностью: в другой заданный момент времени после заданного момента времени: идентифицировать новую лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и новую самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основании комбинации соответствующих новых оценок ранжирования и новых оценок безопасности; в ответ на то, что и новая лучшая траектория, и новая самая безопасная траектория являются первой потенциальной траекторией, предписывать SDC выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории; в ответ на то, что и новая лучшая траектория, и новая самая безопасная траектория являются второй потенциальной траекторией, предписывать SDC выполнять потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
[00035] В четвертом широком аспекте настоящей технологии предоставляется способ управления беспилотным автомобилем (SDC) на участке дороги, при этом на SDC устанавливается сенсорная система для сбора информации об окружении SDC, при этом SDC связан с электронным устройством, причем способ включает в себя этапы, на которых: в данный момент времени во время работы SDC на участке дороги: генерируют с помощью электронного устройства первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги, соответственно; ранжируют с помощью электронного устройства с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию, при этом ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией; классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию, причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет; идентифицируют с помощью электронного устройства лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности; предписывают с помощью электронного устройства SDC работать в соответствии с самой безопасной траекторией; и если самая безопасная траектория и лучшая траектория не являются одной и той же потенциальной траекторией, предписывают с помощью электронного устройства SDC выполнять корректирующее действие, работая в соответствии с самой безопасной траекторией, причем корректирующее действие предписывает лучшей траектории стано самой безопасной траекторией в будущем.
[00036] В некоторых вариантах осуществления способа корректирующее действие заключается во включении визуального индикатора SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения.
[00037] В контексте настоящего описания термин «окружение» данного транспортного средства относится к области или объему вокруг данного транспортного средства, включая часть его текущего окружения, доступную для сканирования с использованием одного или нескольких сенсоров, установленных на данном транспортном средстве, например, для создания трехмерной карты такого окружения или обнаружения в нем объектов.
[00038] В контексте настоящего описания «сервер» - это компьютерная программа, которая работает на соответствующем аппаратном обеспечении и способна принимать запросы (например, от электронных устройств) по сети и выполнять эти запросы или вызывать выполнение этих запросов. выполненный. Аппаратное обеспечение может быть реализовано как один физический компьютер или одна физическая компьютерная система, но ни то, ни другое не требуется в отношении настоящей технологии. В данном контексте использование выражения «сервер» не предназначено для обозначения того, что каждая задача (например, принятые инструкции или запросы) или любая конкретная задача была принята, выполнена или вызвана к выполнению одним и тем же сервером (то есть одним и тем же программным обеспечением и/или аппаратным обеспечением); это означает, что любое количество программных элементов или аппаратных устройств может быть вовлечено в прием/отправку, выполнение или обеспечение выполнения любой задачи или запроса или последствий любой задачи или запроса; и все это программное и аппаратное обеспечение может быть одним сервером или несколькими серверами, оба случая из которых включены в выражение «по меньшей мере один сервер».
[00039] В контексте настоящего описания «электронное устройство» - это любое компьютерное аппаратное обеспечение, которое способно запускать программное обеспечение, подходящее для соответствующей решаемой задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать как сервер для других электронных устройств, однако это не обязательно в отношении настоящей технологии. Таким образом, некоторые (не ограничивающие) примеры электронных устройств включают беспилотные устройства, персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.д.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте тот факт, что устройство функционирует как электронное устройство, не означает, что оно не может функционировать как сервер для других электронных устройств.
[00040] В контексте настоящего описания выражение «информация» включает в себя информацию любого характера или вида, которая может быть сохранена в базе данных. Таким образом, информация включает в себя, помимо прочего, визуальные произведения (например, карты), аудиовизуальные произведения (например, изображения, фильмы, звукозаписи, презентации и т.д.), данные (например, данные о местоположении, данные о погоде, данные о трафике, числовые данные и т.д.), текст (например, мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д.
[00041] В контексте настоящего описания выражение «программный компонент» подразумевает включение программного обеспечения (подходящего для конкретного аппаратного контекста), которое является одновременно необходимым и достаточным для выполнения конкретной(ых) функции(й), на которую делается ссылка.
[00042] В контексте настоящего описания выражение «компьютерный носитель информации» (также называемый «носитель информации») предназначен для включения носителей любого характера и типа, включая, помимо прочего, RAM, ROM, диски (CD-ROM, DVD, дискеты, жесткие диски и т.д.), USB-ключи, твердотельные накопители, ленточные накопители и т.д. Множество компонентов могут быть объединены для формирования компьютерных носителей информации, включая два или более компонентов носителей одного типа и/или два или более компонентов носителей разных типов.
[00043] В контексте настоящего описания «база данных» представляет собой любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерного оборудования, на котором данные хранятся, реализуются или иным образом предоставляются для использования. База данных может находиться на том же аппаратном обеспечении, что и процесс, который хранит или использует информацию, хранящуюся в базе данных, или она может находиться на отдельном аппаратном обеспечении, например на выделенном сервере или множестве серверов.
[00044] В контексте настоящего описания слова «первый», «второй», «третий» и т.д. использовались в качестве прилагательных только с целью обеспечения различия между существительными, которые они изменяют относительно друг друга, а не для цели описания каких-либо конкретных отношений между этими существительными. Кроме того, как обсуждается здесь в других контекстах, ссылка на «первый» элемент и «второй» элемент не препятствует тому, чтобы эти два элемента были одним и тем же фактическим элементом реального мира.
[00045] Каждая из реализаций настоящей технологии имеет по меньшей мере один из вышеупомянутых объектов и/или аспектов, но не обязательно имеет все из них. Следует понимать, что некоторые аспекты настоящей технологии, которые возникли в попытке достичь вышеупомянутой цели, могут не удовлетворять этой цели и/или удовлетворять другим целям, которые не описаны в данном документе явным образом.
[00046] Дополнительные и/или альтернативные признаки, аспекты и преимущества реализаций настоящей технологии станут очевидными из нижеследующего описания, сопроводительных чертежей и приложенной формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00047] Эти и другие признаки, аспекты и преимущества настоящей технологии станут более понятными из нижеследующего описания, приложенной формулы изобретения и сопроводительных чертежей, на которых:
[00048] Фиг.1 изображает принципиальную схему примерной компьютерной системы, конфигурируемой для реализации некоторых неограничивающих вариантов осуществления настоящей технологии;
[00049] Фиг.2 изображает принципиальную схему сетевой вычислительной среды, подходящей для использования с некоторыми неограничивающими вариантами осуществления настоящей технологии;
[00050] Фиг.3 изображает принципиальную схему электронного устройства для реализации различных неограничивающих вариантов осуществления настоящей технологии;
[00051] Фиг.4 иллюстрирует функциональную блок-схему высокого уровня различных модулей, включенных в обучающий модуль, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00052] Фиг.5 изображает типичный участок дороги для обучения в соответствии с различными вариантами осуществления, не ограничивающими вариантами осуществления настоящей технологии;
[00053] Фиг.6 изображает типичную временную шкалу, включая моменты времени обучения в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00054] Фиг.7 изображает другое представление участка дороги для обучения в соответствии с различными вариантами осуществления, не ограничивающими вариантами осуществления настоящей технологии;
[00055] Фиг.8 изображает другую типичную временную шкалу, включая моменты времени обучения в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00056] Фиг.9 изображает обучение ранжирующего алгоритма машинного обучения (MLA) с использованием первого набора обучающих данных в качестве входных данных в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00057] Фиг.10 изображает обучение классифицирующего MLA с использованием второго набора обучающих данных в качестве входных данных в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00058] Фиг.11 иллюстрирует сценарий использования, когда SDC работает на участке дороги, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00059] Фиг.12 иллюстрирует обученный ранжирующий MLA, обученный ранжировать потенциальные траектории в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00060] Фиг. 13 иллюстрирует обученный классифицирующий MLA, обученный классифицировать потенциальные траектории в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00061] Фиг.14 иллюстрирует модуль идентификации траектории, реализованный как подмодуль в модуле планирования движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00062] Фиг.15 иллюстрирует принципиальную схему механизма перехода между состояниями, реализованного в модуле планирования движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии;
[00063] Фиг.16 иллюстрирует типичный сценарий работы SDC на участке дороги, когда механизм перехода между состояниями может находиться в состоянии подготовки к маневру с изменением полосы движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии; и
[00064] Фиг.17 иллюстрирует блок-схему способа работы SDC в соответствии с различными неограничивающими вариантами осуществления настоящей технологии.
Подробное описание
[00065] Приведенные в данном документе примеры и условные формулировки призваны главным образом помочь читателю понять принципы настоящей технологии, а не ограничить ее объем такими конкретно приведенными примерами и условиями. Должно быть понятно, что специалисты в данной области смогут разработать различные механизмы, которые, хоть и не описаны в данном документе явным образом, тем не менее воплощают принципы настоящей технологии и включаются в ее суть и объем.
[00066] Кроме того, нижеследующее описание может описывать реализации настоящей технологии в относительно упрощенном виде для целей упрощения понимания. Специалисты в данной области поймут, что различные реализации настоящей технологии могут иметь большую сложность.
[00067] В некоторых случаях также могут быть изложены примеры модификаций настоящей технологии, которые считаются полезными. Это делается лишь для содействия понимаю и, опять же, не для строгого определения объема или очерчивания границ настоящей технологии. Эти модификации не являются исчерпывающим списком, и специалист в данной области может осуществлять другие модификации, все еще оставаясь при этом в рамках объема настоящей технологии. Кроме того, случаи, когда примеры модификаций не приводятся, не следует толковать так, что никакие модификации не могут быть осуществлены и/или что описанное является единственным способом реализации такого элемента настоящей технологии.
[00068] Более того, все утверждения в данном документе, излагающие принципы, аспекты и реализации технологии, а также их конкретные примеры, предназначены для охвата как их структурных, так и функциональных эквивалентов, независимо от того, известны они в настоящее время или разрабатываются в будущем. Таким образом, например, специалисты в данной области осознают, что любые блок-схемы в данном документе представляют концептуальные виды иллюстративной схемы, воплощающей принципы настоящей технологии.
[00069] Аналогичным образом, будет понятно, что любые блок-схемы, схемы последовательности операций, схемы изменения состояний, псевдо-коды и подобное представляют различные процессы, которые могут быть по сути представлены на считываемых компьютером носителях и исполнены компьютером или процессором вне зависимости от того, показан такой компьютер или процессор явным образом или нет.
[00070] Функции различных элементов, показанных на фигурах, включая любой функциональный блок, обозначенный как «процессор», могут быть обеспечены за счет использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного выполнять программное обеспечение в сочетании с соответствующим программным обеспечением. При обеспечении процессором функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми.
[00071] Кроме того, явное использование термина "процессор" или "контроллер" не должно истолковываться как относящееся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может в неявной форме включать в себя, без ограничений, аппаратное обеспечение цифрового сигнального процессора (DSP), сетевой процессор, интегральную схему специального назначения (ASIC), программируемую пользователем вентильную матрицу (FPGA), постоянную память (ROM) для хранения программного обеспечения, оперативную память (RAM) и энергонезависимое хранилище. Другое аппаратное обеспечение, традиционное и/или специализированное, также может быть включено в состав.
[00072] Программные модули, или просто модули, в качестве которых может подразумеваться программное обеспечение, могут быть представлены в настоящем документе как любая комбинация элементов блок-схемы последовательности операций или других элементов, указывающих выполнение этапов процесса и/или текстовое описание. Такие модули могут выполняться аппаратным обеспечением, которое явно или неявно показано.
[00073] Учитывая эти основополагающие вещи, рассмотрим некоторые неограничивающие примеры, чтобы проиллюстрировать различные реализации аспектов настоящей технологии.
Компьютерная система
[00074] Ссылаясь первоначально на Фиг.1, изображена компьютерная система 100, подходящая для использования с некоторыми реализациями настоящей технологии, компьютерная система 100 содержит различные аппаратные компоненты, включая один или несколько одноядерных или многоядерных процессоров, совместно представленных процессором 110, твердотельный накопитель 120, память 130, которая может быть оперативной памятью или любым другим типом памяти. Связь между различными компонентами компьютерной системы 100 может быть обеспечена одной или несколькими внутренними и/или внешними шинами (не показаны) (например, шиной PCI, универсальной последовательной шиной, шиной Firewire IEEE 1394, шиной SCSI, шиной Serial-ATA и т.д.), с которой различные компоненты оборудования электронно связаны.
[00075] По меньшей мере в некоторых вариантах осуществления настоящей технологии твердотельный накопитель 120 хранит программные инструкции, подходящие для загрузки в память 130 и выполнения процессором 110 для определения присутствия объекта. объекта. Например, программные инструкции могут быть частью приложения управления транспортным средством, выполняемого процессором 110.
[00076] По меньшей мере, в некоторых вариантах осуществления настоящей технологии предполагается, что компьютерная система 100 может иметь дополнительные и/или опциональные компоненты, такие как сетевой модуль 140 связи для связи через сеть связи (например, сеть 240 связи, изображенную на фиг. 2) с другими электронными устройствами и/или серверами, модулями локализации (не показаны) и т.п.
Сетевая компьютерная среда
[00077] Фиг.2 иллюстрирует сетевую компьютерную среду 200, подходящую для использования с некоторыми вариантами осуществления систем и/или способов настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с беспилотным автомобилем (SDC) 220 или связанное с пользователем (не изображенным), который может управлять SDC 220, сервер 235, поддерживающий связь с электронным устройством 210 через сеть 240 связи (например, Интернет и т.п., как будет более подробно описано ниже). Опционально, сетевая компьютерная среда 200 может также включать в себя спутник GPS (не показан), передающий и/или принимающий сигнал GPS на/от электронного устройства 210. Следует понимать, что настоящая технология не ограничивается GPS и может использовать технологию определения местоположения, отличную от GPS. Следует отметить, что спутник GPS можно вообще не использовать.
[00078] SDC 220, с которым связано электронное устройство 210, может включать в себя любое средство передвижения или транспортное средство, такое как частный или коммерческий автомобиль, грузовик, мотоцикл и т.п. Транспортное средство может управляться пользователем или быть транспортным средством без водителя. Следует отметить, что конкретные параметры SDC 220 не являются ограничивающими, эти конкретные параметры включают в себя: производителя транспортного средства, модель транспортного средства, год выпуска транспортного средства, вес транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высоту транспортного средства, тип трансмиссии (например, 2x или 4x), тип шин, тормозная система, топливная система, пробег, идентификационный номер автомобиля и объем двигателя.
[00079] Реализация электронного устройства 210 особо не ограничивается, но в качестве примера электронное устройство 210 может быть реализовано как блок управления двигателем транспортного средства, центральный процессор транспортного средства, навигационное устройство транспортного средства (например, TomTom™, Garmin™), планшет и персональный компьютер, встроенный в SDC 220 и т.п. Таким образом, следует отметить, что электронное устройство 210 может или не может быть постоянно связано с SDC 220. Дополнительно или альтернативно электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В определенных вариантах осуществления электронное устройство 210 имеет дисплей 270.
[00080] Электронное устройство 210 может содержать некоторые или все компоненты компьютерной системы 100, изображенной на Фиг.1. В некоторых вариантах осуществления электронное устройство 210 является бортовым компьютерным устройством и содержит процессор 110, твердотельный накопитель 120 и память 130. Другими словами, электронное устройство 210 содержит аппаратное обеспечение, и/или программное обеспечение, и/или микропрограммное обеспечение, или их комбинацию для определения траектории SDC 220 на заданном участке дороги с учетом препятствий на нем, как будет описано более подробно. ниже.
Сенсорная система
[00081] В неограничивающих вариантах осуществления настоящей технологии электронное устройство 210 содержит сенсорную систему 230 или имеет доступ к ней. Согласно этим вариантам осуществления сенсорная система 230 может содержать множество сенсоров, допускающих различные реализации настоящей технологии. Примеры множества сенсоров включают, но не ограничиваются ими: камеры, лидарные датчики, радарные датчики и т.д. Сенсорная система 230 функционально соединена с процессором 110 для передачи захваченной таким образом информации процессору 110 для ее обработки, как будет более подробно описано в данном документе ниже.
[00082] Сенсорная система 230 может быть установлена во внутренней, верхней части лобового стекла SDC 220, но другие места находятся в пределах объема настоящей технологии, в том числе на заднем окне, боковых окнах, переднем капоте, крыше, передней решетке или переднем бампере SDC 220. В некоторых неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может быть установлена в специальном корпусе (не показан), установленном на верхней части SDC 220.
[00083] Кроме того, пространственное размещение сенсорной системы 230 может быть спроектировано с учетом ее конкретной технической конфигурации, конфигурации корпуса, погодных условий в районе, где будет использоваться SDC 220 (например, частый дождь, снег и другие элементы) или тому подобное.
[00084] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может содержать датчик, выполненный с возможностью захвата изображения окружения 260. В этом отношении сенсорная система 230 может быть камерой или их множеством (отдельно не изображены).
[00085] То, как реализована камера, особо не ограничивается. Например, в одном конкретном неограничивающем варианте осуществления настоящей технологии камера может быть реализована как монокамера с разрешением, достаточным для обнаружения объектов на заранее определенных расстояниях примерно до 30 м (хотя камеры с другими разрешениями и диапазонами находятся в рамках настоящей технологии).
[00086] В некоторых вариантах осуществления настоящей технологии камера (или одна или несколько камер, составляющих реализацию сенсорной системы 230) выполнена с возможностью захвата предварительно определенной части окружающей области 260 вокруг SDC 220. В некоторых вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 90 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль пути движения SDC 220.
[00087] В других вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 180 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль пути движения SDC 220. Еще в дополнительных вариантах осуществления настоящей технологии камера выполнена с возможностью захвата изображения (или серии изображений), которые представляют приблизительно 360 градусов окружающей области 260 вокруг SDC 220, которые находятся вдоль пути движения SDC 220 (другими словами, всю окружающую область вокруг SDC 220).
[00088] В конкретном неограничивающем примере камера может относиться к типу, доступному от FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Ричмонд, Британская Колумбия, V6W 1K7, Канада. Следует четко понимать, что камера может быть реализована в любом другом подходящем оборудовании.
[00089] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может дополнительно содержать лидарный прибор (отдельно не изображен). Лидар расшифровывается как оптическое обнаружение и определение дальности (LIDAR, Light Detection and Ranging). Ожидается, что специалист в данной области техники поймет функциональность лидарного прибора, но вкратце говоря, передатчик (не изображен) лидара отправляет лазерный импульс, а световые частицы (фотоны) рассеиваются обратно в лидарный прибор. Фотоны, которые возвращаются к приемнику, собираются телескопом и подсчитаются в качестве функции времени. Используя скорость света (~ 3 × 108 м/с), процессор 110 может затем вычислить, как далеко прошли фотоны (за круговой путь). Фотоны могут рассеиваться от множества различных объектов, окружающих SDC 220, таких как другие частицы (аэрозоли или молекулы) в атмосфере, другие карты, неподвижные объекты или потенциальные препятствия перед SDC 220.
[00090] В конкретном неограничивающем примере лидарный прибор, входящий в сенсорную систему 230 , может быть реализован как датчик на основе лидара, который может быть типа, доступного от Velodyne LiDAR, Inc., 5521 Hellyer Avenue, San Jose, CA 95138, Соединенные Штаты Америки. Следует четко понимать, что лидарный прибор может быть реализован в любом другом подходящем оборудовании.
[00091] В некоторых вариантах осуществления настоящей технологии лидарный прибор, входящий в сенсорную систему 230 , может быть реализован как множество сенсоров на основе лидара, например, три или любое другое подходящее количество.
[00092] В неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может дополнительно содержать прибор радиообнаружения и определения дальности (радар, RADAR) (отдельно не изображен). Вкратце, радарный прибор - это инструмент обнаружения, использующий радиоволны для определения дальности, угла и/или скорости объектов. Радарный прибор включает в себя передатчик, генерирующий электромагнитные волны, антенну, используемую для передачи и приема электромагнитных волн, приемник и процессор для определения свойств обнаруженных объектов.
[00093] В альтернативных вариантах осуществления настоящей технологии может быть отдельная антенна для приема волн и отдельная антенна для передачи волн. Процессор, используемый для определения свойств окружающих объектов, может быть процессором 110.
[00094] В некоторых вариантах осуществления настоящей технологии радарный прибор, используемый в сенсорной системе 230, может содержать радарные датчики дальнего, среднего и ближнего действия. В качестве неограничивающего примера радарный датчик дальнего действия может использоваться для адаптивного круиз-контроля, автоматического экстренного торможения и предупреждения о лобовом столкновении, в то время как радарные датчики среднего и ближнего действия могут использоваться для помощи при парковке, предупреждения о перекрестном движении, помощи на перекрестке и обнаружения слепой стороны.
[00095] В конкретном неограничивающем примере радарный прибор, содержащийся в сенсорной системе 230, может принадлежать к типу, доступному от Robert Bosch GmbH, Robert-Bosch-Platz 1, 70839 Герлинген, Германия. Следует четко понимать, что радарный прибор может быть реализован в любом другом подходящем оборудовании.
[00096] В некоторых неограничивающих вариантах осуществления настоящей технологии сенсорная система 230 может использоваться процессором 110 для калибровки изображения. Например, используя изображение, захваченное камерой, и лидарное облако точек, захваченное лидарным прибором, процессор 110 выполнен с возможностью идентификации заданной области изображения, чтобы соответствовать заданной области лидарного облака точек, захваченного лидарным прибором. В других вариантах осуществления настоящей технологии сенсорная система 230 откалибрована таким образом, что для изображения, захваченного камерой, лидарного облака точек, захваченного лидарным прибором, и радарных данных, захваченных радарным прибором, процессор 110 выполнен с возможностью идентифицировать данную область изображения, чтобы она соответствовала данной области лидарного облака точек и радарным данным.
[00097] В неограничивающих вариантах осуществления настоящей технологии SDC 220 дополнительно содержит или имеет доступ к другим датчикам (отдельно не изображены). Другие датчики включают в себя один или несколько из следующих элементов: инерциальный измерительный блок (IMU), прибор глобальной навигационной спутниковой системы (GNSS), радары путевой скорости, ультразвуковые сонарные датчики, датчики одометрии, включая акселерометры и гироскопы, механические датчики наклона, магнитный компас и другие датчики, позволяющие работать с SDC 220.
[00098] В качестве неограничивающего примера, IMU может быть прикреплен к SDC 220 и содержать три гироскопа и три акселерометра для предоставления данных о вращательном движении и линейном движении SDC 220, которые могут использоваться для расчета движения и положения SDC. 220.
Сеть связи
[00099] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой Интернет. В альтернативных неограничивающих вариантах осуществления сеть 240 связи может быть реализована как любая подходящая локальная сеть (LAN), глобальная сеть (WAN), частная сеть связи и т.п. Следует четко понимать, что реализации сети 240 связи приведены только для целей иллюстрации. То, как реализована линия связи (отдельно не пронумерована) между электронным устройством 210 и сетью 240 связи, будет зависеть, в частности, от того, как реализовано электронное устройство 210. Просто в качестве примера, а не ограничения, в тех неограничивающих вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано как устройство беспроводной связи, такое как смартфон или навигационное устройство, линия связи может быть реализована как линия беспроводной связи. Примеры линий беспроводной связи включают в себя, но не ограничиваются ими, линию связи в сети 3G, линию связи в сети 4G, линию связи в сети 5G и т.п. Сеть 240 связи также может использовать беспроводное соединение с сервером 235.
Сервер
[000100] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован как обычный компьютерный сервер и может содержать некоторые или все компоненты компьютерной системы 100, показанной на Фиг.1. В одном неограничивающем примере сервер 235 реализован как сервер Dell™ PowerEdge™, работающий под управлением операционной системы Microsoft™ Windows Server™, но также может быть реализован в любом другом подходящем аппаратном обеспечении, программном обеспечении и/или микропрограммном обеспечении или их комбинации. В изображенных неограничивающих вариантах осуществления настоящей технологии сервер является одним сервером. В альтернативных неограничивающих вариантах осуществления настоящей технологии (не показаны) функциональные возможности сервера 235 могут быть распределены и могут быть реализованы посредством нескольких серверов.
[000101] В некоторых неограничивающих вариантах осуществления настоящей технологии процессор 110 электронного устройства 210 может поддерживать связь с сервером 235 для приема одного или нескольких обновлений. Обновлениями могут быть, помимо прочего, обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погоды и т.п.
[000102] В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть выполнен с возможностью передачи на сервер 235 определенных рабочих данных, таких как пройденные маршруты, данные дорожного движения, данные производительности и т.п. Некоторые или все данные, передаваемые между SDC 220 и сервером 235, могут быть зашифрованы и/или анонимизированы.
Хранилище
[000103] На Фиг.2 также изображено хранилище 250, связанное с возможностью осуществления связи с сервером 235. Однако в некоторых вариантах осуществления хранилище 250 может быть связано с возможностью осуществления связи с электронным устройством 210 и/или может быть реализовано в электронном устройстве 210 и/или может быть связано с возможностью осуществления связи с любым другим процессором сетевой компьютерной среды 200.
[000104] По меньшей мере в некоторых вариантах осуществления предполагается, что хранилище 250 может использоваться сервером 235, электронным устройством 210 и/или любым другим процессором сетевой компьютерной среды 200 в качестве устройства памяти для хранения информации. Хранилище 250 выполнено с возможностью хранения информации, извлеченной, определенной и/или сгенерированной процессором 110 сервера 235 и/или электронного устройства 210. Вообще говоря, хранилище 250 может принимать данные от процессора 110, которые были сгенерированы процессором 110 во время обработки, для их временного и/или постоянного хранения, и может предоставлять сохраненные данные процессору 110 для их использования. Предполагается, что хранилище 250 может быть разделено на несколько распределенных хранилищ, например, для обеспечения отказоустойчивой системы хранения, не выходя за рамки настоящей технологии.
[000105] Следует отметить, что по меньшей мере в некоторых вариантах осуществления настоящей технологии хранилище 250 может быть реализовано локально на электронном устройстве 210 и/или сервере 235 (например, в локальной памяти). Однако также предполагается, что хранилище 250 может быть реализовано удаленно от электронного устройства 210 и/или сервера 235 (например, в удаленной памяти).
Электронное устройство
[000106] Фиг.3 изображает принципиальную схему электронного устройства 210 для реализации различных неограничивающих вариантов осуществления настоящей технологии. Электронное устройство 210 может содержать один или несколько «модулей» для выполнения множества задач обработки данных. Некоторые из неограничивающих модулей могут включать в себя обучающий модуль 302, модуль 304 восприятия, модуль 306 генерирования траектории, модуль 308 обученного алгоритма машинного обучения (MLA) и модуль 310 планирования движения.
[000107] Проиллюстрированные соединения между различными модулями на фиг. 3 соответствуют некоторым неограничивающим вариантам осуществления настоящей технологии. Различные модули могут связываться друг с другом независимо от показанных соединений. Следует отметить, что электронное устройство 210 может включать в себя дополнительные компоненты (например, те, что включены в компьютерную систему 100) и/или модули, но они исключены из Фиг.3 для простоты. Следует отметить, что каждый из неисчерпывающего списка модулей, перечисленных выше, может быть воплощен как одна или несколько компьютерно-реализуемых процедур, которые выполнены с возможностью выполнения обработки данных и/или генерирования данных, как описано в данном документе. В качестве альтернативы данный модуль может быть физическим электронным устройством. Опционально, несколько модулей (или все модули) могут быть реализованы в одном электронном устройстве 210.
[000108] По меньшей мере в некоторых вариантах осуществления разработчики настоящей технологии разработали способы и устройства, которые могут предоставить решения в ситуациях, когда объекты могут находиться поблизости от SDC 220 и могут представлять риск столкновения с SDC 220 во время маневра. Помимо обеспечения безопасного маневра, разработанные способы и устройства могут также обеспечивать плавное и удобное маневрирование.
[000109] Предполагается, что «объект» может относиться к любому транспортному средству (например, другому SDC, другому управляемому человеком транспортному средству и т.п.), велосипеду, человеку на дороге, человеку вместе с домашним животным на дороге (в некоторых случаях человек, держащий домашнее животное, может упоминаться как один объект) или тому подобному. Кроме того, если объект находится в движении, он может называться динамическим объектом; другие могут называться статическими объектами.
[000110] В некоторых из неограничивающих вариантов осуществления электронное устройство 210 может полагаться на разные обученные MLA для прогнозирования безопасных траекторий для SDC 220. В различных неограничивающих вариантах осуществления перед использованием электронное устройство 210 может быть выполнено с возможностью обучения различных MLA. В частности, обучающий модуль 302 может быть выполнен с возможностью сбора наборов обучающих данных и обучения различных MLA на основе собранных наборов обучающих данных.
[000111] Чтобы собрать наборы обучающих данных и обучить MLA, в различных неограничивающих вариантах осуществления SDC 220 может работать как в ручном режиме, так и в беспилотном (автономном) режиме. Фиг.4 иллюстрирует функциональную блок-схему высокого уровня различных модулей, включенных в обучающий модуль 302, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Как проиллюстрировано, обучающий модуль 302 может включать в себя модуль 302-2 сбора траекторий в ручном режиме, модуль 302-4 сбора траекторий в беспилотном режиме, хранилище 302-6 наборов обучающих данных и обучающий модуль 302-12 MLA. Обучающий модуль 302-12 может включать в себя ранжирующий MLA 302-14 и классифицирующий MLA 302-16. Следует отметить, что обучающий модуль 302 может включать в себя другие компоненты и модули, но они не показаны на фиг.4 для простоты и иллюстраций.
[000112] В различных неограничивающих вариантах ранжирующий MLA 302-14 может быть обучен прогнозировать оценку ранжирования, так что оценка ранжирования может указывать на сходство между соответствующей потенциальной траекторией и эталонной траекторией. Чтобы собрать набор обучающих данных для обучения ранжирующего MLA 302-14, в различных неограничивающих вариантах осуществления SDC 220 может работать в ручном режиме, то есть SDC 220 управляется вручную человеком-экспертом 290 (как показано на Фиг.2). В различных неограничивающих вариантах осуществления человек-эксперт 290 может управлять SDC 220 на участке дороги для обучения.
[000113] На фиг.5 изображен типичный участок 400 дороги для обучения в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Как показано, участок 400 дороги для обучения может включать полосы 402, 404 и 406 движения дороги для обучения. Чтобы собрать набор обучающих данных для обучения ранжирующего MLA 302-14, в различных неограничивающих вариантах осуществления человек-эксперт 290 (как показано на фиг. 2) может вручную управлять SDC 220 на участке 400 дороги для обучения.
[000114] Модуль 302-2 сбора траекторий в ручном режиме (как показано на фиг. 4) может быть выполнен с возможностью сбора траектории 408 ручного обучения SDC 220, выполняемой человеком-экспертом 290 во время работы SDC 220 на участке 400 дороги для обучения. Траектория 408 ручного обучения может включать в себя текущие и будущие точки местоположения, вместе именуемые точками 410 местоположения, в разный момент времени на участке 400 дороги для обучения. Как будет обсуждаться более подробно, в различных неограничивающих вариантах осуществления траектория 408 ручного обучения может использоваться в качестве эталона для обучения ранжирующего MLA 302-14, следовательно, траектория 408 ручного обучения также может называться эталонной траекторией 408 далее.
[000115] Следует отметить, что для простоты на фиг.5 проиллюстрирована только одна траектория 408 ручного обучения. Однако в различных неограничивающих вариантах осуществления человек-эксперт 290 может выполнить более одной траектории ручного обучения на разных участках дороги для обучения, отличных от участка 400 дороги для обучения. Модуль 302-2 сбора траекторий в ручном режиме может собирать все такие траектории ручного обучения. Кроме того, участок 400 дороги для обучения может включать в себя другие объекты (не изображены), и человек-эксперт 290 может рассматривать такие объекты при работе с SDC 220.
[000116] В то же время, когда человек-эксперт 290 управляет SDC 220, электронное устройство 210 может быть выполнено с возможностью генерирования прогнозируемых траекторий для обучения для SDC 220. Прогнозируемые траектории для обучения могут быть сгенерированы таким же образом, как если бы SDC 220 управлялся в беспилотном режиме. Однако такие прогнозируемые траектории для обучения могут не влиять на работу SDC 220, которым управляет человек-эксперт 290.
[000117] В некоторых неограничивающих вариантах осуществления для генерирования прогнозируемых траекторий для обучения электронное устройство 210 может быть выполнено с возможностью обработки информации, полученной системой 230 датчиков (как показано на Фиг.3) об окружении SDC 220. Как обсуждалось ранее, сенсорная система 230 SDC 220 может включать в себя датчики (например, камеры, лидарные датчики, радарные датчики и т.д.), которые выполнены с возможностью получения информации об окружении в реальном времени. Информация в реальном времени может включать в себя информацию, относящуюся к области перед, сбоку рядом и/или позади SDC 220. Сенсорная система 230 может постоянно обнаруживать и отслеживать один или несколько объектов поблизости от SDC 220, чтобы определять параметры, касающиеся ситуаций вождения для объектов. Некоторые из неограничивающих параметров включают в себя, например, скорость, разницу в местоположении объекта от SDC 220 в зависимости от времени или тому подобное.
[000118] В некоторых неограничивающих вариантах осуществления сенсорная система 230 может предоставлять в реальном времени информацию об окружении SDC 220 в модуль 304 восприятия (как показано на фиг. 3). Модуль 304 восприятия может быть выполнен с возможностью выполнения по меньшей мере некоторой обработки данных в отношении информации в реальном времени и может предоставлять обработанные данные другим модулям электронного устройства 210. Модуль 304 восприятия может выполнять по меньшей мере некоторую обработку данных в отношении информации в реальном времени, чтобы определить, например, количество объектов, находящихся в настоящее время в движении рядом с SDC 220, перемещается ли другой объект относительно SDC 220 в той же или на соседней полосе движения, движется ли другой объект относительно SDC 220 в том же или противоположном направлении, какая скорость или разность скорости по отношению к SDC 220 у этого объекта, информацию о рулевом управлении объекта и т.п. Предполагается, что приведенный выше список не является исчерпывающим, и модуль 304 восприятия может определять, извлекать или выводить любую подходящую информацию об окружении SDC 220 путем обработки информации в реальном времени.
[000119] В одном неограничивающем варианте осуществления модуль 304 восприятия может предоставлять обработанные данные в модуль 306 генерирования траектории. Модуль 306 генерирования траектории может быть выполнен с возможностью генерирования прогнозируемых траекторий для обучения, связанных с SDC 220. Каждая из прогнозируемых траекторий для обучения может включать в себя потенциальные будущие точки местоположения SDC 220 на участке 400 дороги для обучения в зависимости от времени. Модуль 306 генерирования траектории может генерировать прогнозируемые траектории для обучения, связанные с SDC 220, на основе данных движения, которые указывают на кинематические характеристики (например, скорость, ускорение, направление, угол и т.п.) SDC 220, и на основе участка 400 дороги для обучения, который указывает на различные ограничения участков дороги, такие как, например, правила дорожного движения и форма дороги.
[000120] Ссылаясь на фиг.5, две из прогнозируемых траекторий для обучения, сгенерированных модулем 306 генерирования траектории, могут упоминаться как прогнозируемые траектории 412 и 416 для обучения. Прогнозируемые траектории 412 и 416 для обучения могут включать в себя текущие и будущие точки местоположения, вместе именуемые точками 414 и 418 местоположения соответственно в разный момент времени на участке 400 дороги для обучения. Следует отметить, что то, как прогнозируемые траектории 412 и 416 для обучения генерируются модулем 306 генерирования траектории, не должно ограничивать объем настоящей технологии.
[000121] Фиг.6 изображает типичную временную шкалу 460, включающую моменты времени 462-1, 462-2, 462-3 и 462-4 обучения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. В некоторых неограничивающих вариантах осуществления модуль 302-2 сбора траекторий в ручном режиме (как показано на фиг. 4) может быть выполнен с возможностью сбора траекторий ручного обучения SDC 220 в различные моменты времени обучения. В то же время, модуль 302-2 сбора траекторий в ручном режиме может быть выполнен с возможностью сбора прогнозируемых траекторий 412 и 416 для обучения SDC 220 в различные моменты времени обучения.
[000122] В качестве примера модуль 302-2 сбора траекторий для обучения в ручном режиме может быть выполнен с возможностью хранения траектории 408 ручного обучения и прогнозируемых траекторий 412 и 416 для обучения в качестве первого набора 302-8 обучающих данных (как показано на Фиг.4) в хранилище 302-6 наборов обучающих данных. Следует отметить, что первый набор 302-8 обучающих данных может включать в себя несколько траекторий 408 ручного обучения, также называемых эталонными траекториями 408, выполняемых человеком-экспертом 290 на участке 400 дороги для обучения, и соответствующих множественных прогнозируемых траекторий для обучения, включая траектории 412 и 416 для обучения, генерируемые модулем 306 генерирования траектории. В некоторых неограничивающих вариантах осуществления первый набор 302-8 обучающих данных может также включать в себя информацию (например, количество полос движения, ширину каждой полосы движения, кривизну полос движения и т.п.) об участке 400 дороги для обучения.
[000123] В различных неограничивающих вариантах осуществления человек-эксперт 290 для управления SDC 220 в ручном режиме может быть высококвалифицированным профессиональным водителем. В других неограничивающих вариантах осуществления человек-эксперт 290 может быть обычным водителем, обученным управлять SDC 220 в соответствии с хорошим поведением при вождении. Траектория 408 ручного обучения может предлагать плавный и удобный маневр по сравнению с прогнозируемыми траекториями 412 и 416 для обучения. В качестве примеров, ускорение и/или замедление SDC 220 во время траектории 408 ручного обучения может быть менее резким по сравнению с прогнозируемой траекторией 412 для обучения.
[000124] В различных неограничивающих вариантах осуществления SDC 220 может управляться в беспилотном режиме для генерирования второго набора 302-10 обучающих данных (как показано на Фиг.4) для обучения классифицирующего MLA 302-16. В различных неограничивающих вариантах осуществления классифицирующий MLA 302-16 можно обучить генерировать оценку безопасности, так что оценка безопасности может указывать на то, является ли соответствующая потенциальная траектория безопасной. Следует отметить, что порядок, в котором генерируются первый набор 302-8 обучающих данных и второй набор 302-10 обучающих данных, не должен ограничивать объем настоящей технологии.
[000125] Чтобы собрать второй набор 302-10 обучающих данных для обучения классифицирующего MLA 302-16, в различных неограничивающих вариантах осуществления SDC 220 может управляться в беспилотном режиме, то есть SDC 220 управляется автономно. Однако в различных неограничивающих вариантах осуществления человек-эксперт 290 может все еще двигаться в SDC 220 на участке 400 дороги для обучения, чтобы предоставлять неявные и/или явные входные данные.
[000126] На фиг.7 показано другое представление участка 400 дороги для обучения в соответствии с различными вариантами осуществления, не ограничивающими вариантами осуществления настоящей технологии. Чтобы собрать второй набор 302-10 обучающих данных для обучения классифицирующего MLA 302-16, в различных неограничивающих вариантах осуществления SDC 220 может управляться в беспилотном режиме на участке 400 дороги для обучения.
[000127] Модуль 302-4 сбора траекторий в беспилотном режиме (как показано на фиг. 4) может быть выполнен с возможностью сбора прогнозируемых траекторий 420 и 424 для обучения SDC 220, сгенерированных модулем 306 генерирования траектории, аналогичным образом, как обсуждалось ранее. Прогнозируемые траектории 420 и 424 для обучения могут включать в себя текущие и будущие точки местоположения, вместе называемые точками 422 и 426 местоположения соответственно, в разный момент времени на участке 400 дороги для обучения. Следует отметить, что для простоты только две прогнозируемые траектории 420 и 424 для обучения показаны на Фиг.7. Однако в различных неограничивающих вариантах осуществления более двух прогнозируемых траекторий для обучения могут быть сгенерированы модулем 306 генерирования траектории на разных участках дороги для обучения, отличных от участка 400 дороги для обучения. Модуль 302-4 сбора траекторий в беспилотном режиме может собирать все такие спрогнозированные траектории для обучения.
[000128] Кроме того, участок 400 дороги для обучения может включать в себя объект 430, двигающийся по полосе 404 движения дороги для обучения. Следует понимать, что участок 400 дороги для обучения может включать в себя другие объекты, но не показаны на фиг. 7 для простоты.
[000129] Фиг. 8 изображает типичную временную шкалу 470, включающую моменты 472-1, 472-2, 472-3 и 472-4 времени обучения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. В некоторых неограничивающих вариантах осуществления модуль 302-4 сбора траекторий в беспилотном режиме (как показано на Фиг.4) может быть выполнен с возможностью сбора прогнозируемых траекторий 420 и 424 для обучения SDC 220 в различные моменты 472-1 и 472-2 времени обучения соответственно. В различных неограничивающих вариантах осуществления моменты 472-1, 472-2, 472-3 и 472-4 времени обучения могут соответствовать «тикам» (временным меткам), которые представляют собой периодические моменты времени, в течение которых модуль 306 генерирования траектории может быть выполнен с возможностью генерирования новых/обновленных прогнозируемых траекторий для управления SDC 220 и сбора прогнозируемых траекторий 420 и 424 для обучения SDC 220, сгенерированных модулем 306 генерирования траектории. В некоторых неограничивающих вариантах осуществления может быть заранее определена продолжительность между двумя моментами времени обучения, такими как моменты 472-1 и 472-2 времени обучения.
[000130] Как обсуждалось ранее, даже несмотря на то, что SDC 220 может управляться в беспилотном режиме, человек-эксперт 290 может все еще двигаться в SDC 220 на участке 400 дороги для обучения во время моментов 472-1, 472-2, 472-3 и 472-4 времени обучения для обеспечения неявного и/или явного ввода 478. В некоторых неограничивающих вариантах осуществления модуль 302-4 сбора траекторий в беспилотном режиме может быть выполнен с возможностью предоставления метки для прогнозируемых траекторий 420 и 424 для обучения. Метка может указывать по меньшей мере на один из явных и неявных вводов человека-эксперта 290.
[000131] В некоторых неограничивающих вариантах осуществления неявный ввод 478 может упоминаться как косвенное согласие человека-эксперта 290 с прогнозируемой траекторией для обучения (например, прогнозируемыми траекториями 420 или 424 для обучения). Другими словами, если человек-эксперт 290 не предоставляет никаких входных данных, в то время как SDC 220 следует конкретной прогнозируемой траектории для обучения (например, прогнозируемым траекториям 420 или 424 для обучения), это может называться неявным вводом 478. В одном примере, если SDC 220 следует прогнозируемой траектории 420 для обучения, а человек-эксперт 290 не предоставляет никаких входных данных и позволяет SDC 220 двигаться прямо, ввод может называться неявным вводом 478. В другом примере, если SDC 220 следует прогнозируемой траектории 424 для обучения, а человек-эксперт 290 не предоставляет никаких данных и позволяет SDC 220 изменить полосу движения дороги для обучения с полосы 402 движения дороги для обучения на полосу 404 движения дороги для обучения, ввод может называться неявным вводом 478. Таким образом, можно сказать, что отсутствие вмешательства, такое как отсутствие участия или косвенное согласие человека-эксперта 290, в то время как SDC 220 выполняет либо маневр с изменением полосы движения, либо маневр удержания полосы движения, может рассматриваться как неявный ввод 478 для этого конкретного маневра.
[000132] В некоторых неограничивающих вариантах осуществления явный ввод 478 может упоминаться как несогласие человека-эксперта 290 с прогнозируемой траекторией для обучения (например, прогнозируемыми траекториями 420 или 424 для обучения). Другими словами, если человек-эксперт 290 предоставляет ввод, в то время как SDC 220 следует конкретной прогнозируемой траектории для обучения (например, прогнозируемым траекториям 420 или 424 для обучения), это может называться явным вводом 478. Ввод от человека-эксперта 290 может быть в форме прямого действия, влияющего на управление SDC 220 в беспилотном режиме. В одном примере, если SDC 220 следует прогнозируемой траектории 420 для обучения, а человек-эксперт 290 предоставляет ввод (такой как ускорение, замедление, торможение, рулевое управление и т.п.), приводящий к изменению траектории SDC 220, это можно называть явным вводом 478. В другом примере, если SDC 220 следует прогнозируемой траектории 424 для обучения и человек-эксперт 290 предоставляет ввод и избегает, чтобы SDC 220 изменило полосу движения дороги для обучения с полосы 402 движения дороги для обучения на полосу 404 движения дороги для обучения, ввод может называться явным вводом 478. Таким образом, можно сказать, что вмешательство, такое как вмешательство или несогласие человека-эксперта 290, в то время как SDC 220 выполняет либо маневр с изменением полосы движения, либо маневр удержания полосы движения, может называться явным вводом 478 для этого конкретного маневра.
[000133] Предполагается, что в случае, если человек-эксперт 290 должен взять на себя управление SDC 220, это можно назвать ситуацией, когда прогнозируемая траектория 420 или 424 для обучения может быть небезопасной для следования. С этой целью в некоторых вариантах осуществления, если ввод, связанный с конкретной прогнозируемой траекторией для обучения (например, прогнозируемые траектории 420 или 424 для обучения), является явным, траектория может быть помечена как небезопасная траектория. С другой стороны, если ввод, связанный с конкретной прогнозируемой траекторией для обучения (например, прогнозируемые траектории 420 или 424 для обучения), является неявным, траектория может быть помечена как безопасная траектория.
[000134] В некоторых неограничивающих вариантах осуществления модуль 302-4 сбора траекторий в беспилотном режиме может быть выполнен с возможностью хранения прогнозируемых траекторий 420 и 424 для обучения в качестве второго набора 302-10 обучающих данных (как показано на Фиг.4) в хранилище 302-6 наборов обучающих данных. Следует отметить, что второй набор 302-10 обучающих данных может включать в себя несколько прогнозируемых траекторий для обучения, помеченных как безопасные или небезопасные.
[000135] Фиг.9 изображает обучение ранжирующего MLA 302-14 с использованием первого набора 302-8 обучающих данных в качестве ввода в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Для обучения ранжирующего MLA 302-14 в некоторых неограничивающих вариантах осуществления обучающий модуль 302-12 MLA (как показано на Фиг.4) может быть выполнен с возможностью получения первого набора 302-8 обучающих данных из хранилища 302-6 наборов обучающих данных. Как обсуждалось ранее, первый набор 302-8 обучающих данных может включать в себя траектории 408 ручного обучения и прогнозируемые траектории 412 и 416 для обучения.
[000136] На основе прогнозируемых траекторий 412 и 416 для обучения и траекторий 408 ручного обучения обучающий модуль 302-12 MLA может быть выполнен с возможностью обучения ранжирующего MLA 302-14 для прогнозирования оценки ранжирования, связанной с потенциальной траекторией. В некоторых неограничивающих вариантах осуществления оценка ранжирования может указывать на сходство между прогнозируемыми траекториями 412 и 416 для обучения и траекториями 408 ручного обучения. Другими словами, ранжирующий MLA 302-14 может быть выполнен с возможностью сравнения прогнозируемых траекторий 412 и 416 для обучения с траекториями 408 ручного обучения и может генерировать оценку ранжирования. Оценка ранжирования может указывать, насколько похожи прогнозируемые траектории 412 и 416 для обучения на траектории 408 ручного обучения. Более похожая траектория может иметь более высокий рейтинг по сравнению с траекторией, которая менее похожа на траектории 408 ручного обучения.
[000137] В различных неограничивающих вариантах осуществления ранжирующий MLA 302-14 можно обучить прогнозировать оценку ранжирования без учета безопасности соответствующей траектории для обучения. Ранжирующий MLA 302-14 может предоставлять оценку 480 ранжирования, соответствующую прогнозируемой траектории 412 для обучения, и оценку 482 ранжирования, соответствующую прогнозируемой траектории 416 для обучения. В случае, если прогнозируемая траектория 412 для обучения больше похожа на траектории 408 ручного обучения, чем прогнозируемая траектория 418 для обучения, оценка 480 ранжирования может быть выше, чем оценка 482 ранжирования, и наоборот.
[000138] В некоторых неограничивающих вариантах осуществления ранжирующий MLA 302-14 может быть выполнен с возможностью вычисления расстояния, указывающего, насколько похожи прогнозируемые траектории 412 и 416 для обучения на траектории 408 ручного обучения. Основываясь на расстоянии, ранжирующий MLA 302-14 может быть выполнен с возможностью ранжирования прогнозируемых траекторий 412 и 416 для обучения. В некоторых неограничивающих вариантах осуществления при обучении ранжирующего MLA 302-14 расстояние, указывающее на сходство прогнозируемых траекторий 412 и 416 для обучения по отношению к траекториям 408 ручного обучения, может быть предоставлено в качестве обратной связи для ранжирующего MLA 302-14 для обучения с учителем ранжирующего MLA 302-14.
[000139] В некоторых неограничивающих вариантах осуществления ранжирующий MLA 302-14 может быть алгоритмом попарного ранжирования и/или алгоритмом ранжирования по спискам, обученным способом обучения с учителем. Однако можно использовать любой другой подходящий алгоритм ранжирования без отступления от принципов настоящей технологии.
[000140] Фиг.10 изображает обучение классифицирующего MLA 302-16 с использованием второго набора 302-10 обучающих данных в качестве ввода в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Чтобы обучить классифицирующий MLA 302-16, в некоторых неограничивающих вариантах осуществления, обучающий модуль 302-12 MLA (как показано на Фиг.4) может быть выполнен с возможностью извлечения второго набора 302-10 обучающих данных из хранилища 302-6 наборов обучающих данных. Как обсуждалось ранее, второй набор 302-10 обучающих данных может включать в себя прогнозируемые траектории 420 и 424 для обучения. Прогнозируемые траектории 420 и 424 для обучения могут включать в себя метки, указывающие по меньшей мере один из неявных и явных вводов 478 человека-эксперта 290.
[000141] Основываясь на прогнозируемых траекториях 420 и 424 для обучения, обучающий модуль 302-12 MLA может быть выполнен с возможностью обучать классифицирующий MLA 302-16 для генерирования оценки безопасности и на основе оценки безопасности классифицировать, является ли соответствующая потенциальная траектория безопасной. В некоторых неограничивающих вариантах осуществления классифицирующий MLA 302-16 может также обеспечиваться неявным и явным вводом 478 человека-эксперта 290 для обучения классифицирующего MLA 302-16.
[000142] Ссылаясь на фиг. 10, классифицирующий MLA 302-16 может предоставить оценку 490 безопасности, соответствующую прогнозируемой траектории 420 для обучения, и оценку 492 безопасности, соответствующую прогнозируемой траектории 424 для обучения. Оценка 490 и 492 безопасности может указывать на то, безопасны ли прогнозируемые траектории 420 и 424 для обучения.
[000143] В некоторых неограничивающих вариантах осуществления классифицирующий MLA 302-16 может быть алгоритмом на основе дерева решений, обученным способом обучения с учителем. Однако можно использовать любой другой подходящий алгоритм классификации, не отступая от принципов настоящей технологии.
[000144] После того, как ранжирующий MLA 302-14 и классифицирующий MLA 302-16 обучены обучающим модулем 302-12 MLA, SDC 220 может управляться на участке дороги, отличном от участка 400 дороги для обучения, с фактическим движением. SDC 220 может полагаться на обученный ранжирующий MLA 302-14 и обученный классифицирующий MLA 302-16 во время движения по участку дороги.
[000145] Фиг.11 иллюстрирует сценарий использования, когда SDC 220 управляется на участке 500 дороги, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Как показано, участок 500 дороги может включать в себя полосы 502-1, 502-2 и 502-3 движения. Первоначально можно предположить, что SDC 220 движется по полосе 502-2 движения. Также предполагается, что объект 504 движется по полосе 502-2 движения. Следует отметить, что вышеупомянутый участок 500 дороги и сценарий использования приведены только для иллюстрации. В различных неограничивающих вариантах осуществления участок 500 дороги может включать в себя любое количество полос движения с любым количеством объектов.
[000146] Ссылаясь на Фиг.3, в различных неограничивающих вариантах осуществления в данный момент времени во время работы SDC 220 на участке 500 дороги сенсорная система 230 может быть выполнена с возможностью получения информации в реальном времени об окружении SDC 220. Сенсорная система 230 может предоставлять в реальном времени информацию об окружении SDC 220 в модуль 304 восприятия. Как обсуждалось ранее, модуль 304 восприятия может быть выполнен с возможностью выполнения по меньшей мере некоторой обработки данных с информацией в реальном времени. Модуль 304 восприятия может быть выполнен с возможностью предоставления обработанной информации в реальном времени модулю 306 генерирования траектории. Модуль 306 генерирования траектории может генерировать потенциальные траектории, связанные с SDC 220, на основе данных движения, которые указывают на кинематические характеристики (например, скорость, ускорение, направление, угол и т.п.) SDC 220, и на основе участка 500 дороги, что свидетельствует о различных ограничениях участков дороги, таких как, например, правила дорожного движения и форма дороги.
[000147] Ссылаясь на фиг.11, потенциальные траектории, генерируемые модулем 306 генерирования траектории, могут быть представлены как потенциальные траектории 506-1, 506-2 и 506-3. Следует отметить, что для простоты показаны только три траектории. Однако в различных неограничивающих вариантах осуществления любое количество траекторий может генерироваться модулем 306 генерирования траектории.
[000148] Модуль 306 генерирования траектории может быть выполнен с возможностью направления потенциальных траекторий 506-1, 506-2 и 506-3 к обученному модулю 308 MLA (как показано на Фиг.3). В некоторых неограничивающих вариантах осуществления обучающий модуль 302 может быть выполнен с возможностью предоставления предварительно обученного ранжирующего MLA 302-12 и классифицирующего MLA 302-16 обученному модулю 308 MLA. Для простоты и ясности ранее обученный MLA 302-12 может упоминаться как обученный ранжирующий MLA 308-1, а ранее обученный классифицирующий MLA 302-16 может упоминаться как обученный классифицирующий MLA 308-2.
[000149] Фиг.12 иллюстрирует обученный ранжирующий MLA 308-1, обученный ранжировать потенциальные траектории 506-1, 506-2 и 506-3, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Для простоты только потенциальные траектории 506-1 и 506-2 показаны в качестве входных данных для обученного ранжирующего MLA 308-1. Однако в различных неограничивающих вариантах осуществления любое количество потенциальных траекторий может быть предоставлено в качестве входных данных для обученного ранжирующего MLA 308-1. Обученный ранжирующий MLA 308-1 может быть выполнен с возможностью ранжирования потенциальных траекторий 506-1 и 506-2. Для этого обученный ранжирующий MLA 308-1 может быть обучен прогнозировать оценки ранжирования для потенциальных траекторий 506-1 и 506-2.
[000150] В соответствии с потенциальной траекторией 506-1 обученный ранжирующий MLA 308-1 может прогнозировать оценку 510-1 ранжирования. Аналогично, для потенциальной траектории 506-2 обученный ранжирующий MLA 308-1 может прогнозировать оценку 510-2 ранжирования.
[000151] В различных неограничивающих вариантах осуществления обученный ранжирующий MLA 302-14 может прогнозировать оценки 510-1 и 510-2 ранжирования, указывающие на сходство между потенциальными траекториями 506-1 и 506-2 и эталонной траекторией (не проиллюстрирована). В некоторых неограничивающих вариантах осуществления оценки ранжирования могут указывать на то, насколько похожи потенциальные траектории 506-1 и 506-2 на заданную эталонную траекторию, которая была бы выполнена человеком-экспертом 290 на участке 500 дороги. Следует отметить, что оценки 510-1 и 510-2 ранжирования могут быть спрогнозированы без учета безопасности соответствующих потенциальных траекторий 506-1 и 506-2. Другими словами, потенциальные траектории 506-1 и 506-2 могут быть или не могут быть безопасными для SDC 220 с точки зрения маневрирования.
[000152] На фиг. 13 показан обученный классифицирующий MLA 308-2, обученный классифицировать потенциальные траектории 506-1, 506-2 и 506-3 в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Для простоты только потенциальные траектории 506-1 и 506-2 показаны в качестве входных данных для обученного классифицирующего MLA 308-2. Однако в различных неограничивающих вариантах осуществления любое количество потенциальных траекторий может быть предоставлено в качестве входных данных для обученного классифицирующего MLA 308-2. Обученный классифицирующий MLA 308-2 может быть выполнен с возможностью классификации потенциальных траекторий 506-1 и 506-2. Для этого обученный классифицирующий MLA 308-2 может быть обучен генерировать оценки безопасности для потенциальных траекторий 506-1 и 506-2.
[000153] В соответствии с потенциальной траекторией 506-1 обученный классифицирующий MLA 308-2 может генерировать оценку 512-1 безопасности. Точно так же для потенциальной траектории 506-2 обученный классифицирующий MLA 308-2 может генерировать оценку 512-2 безопасности.
[000154] Следует отметить, что обученный ранжирующий MLA 308-1 и обученный классифицирующий MLA 308-2 могут иметь разные компьютерные архитектуры, имеющие разные функциональные возможности. В качестве примера обученный ранжирующий MLA 308-1 может выполнять ранжирование потенциальных траекторий (таких как потенциальные траектории 506-1 и 506-2), в то время как обученный классифицирующий MLA 308-2 может выполнять классификацию потенциальных траекторий (таких как как потенциальные траектории 506-1 и 506-2). Кроме того, обученный ранжирующий MLA 308-1 и обученный классифицирующий MLA 308-2 могут быть независимо обучены с использованием различных наборов обучающих данных, таких как первый набор 302-8 обучающих данных и второй набор 302-10 обучающих данных соответственно.
[000155] В различных неограничивающих вариантах осуществления обученный ранжирующий MLA 308-1 и обученный классифицирующий MLA 308-2 могут быть выполнены с возможностью работы параллельно. С этой целью классификация потенциальных траекторий 506-1 и 506-2 может выполняться параллельно с ранжированием потенциальных траекторий 506-1 и 506-2. Кроме того, в различных неограничивающих вариантах осуществления классификация потенциальных траекторий 506-1 и 506-2 может выполняться независимо от ранжирования потенциальных траекторий 506-1 и 506-2.
[000156] На фиг.14 показан модуль 310-2 идентификации траектории, реализованный как подмодуль в модуле 310 планирования движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Обученный модуль 308 MLA может быть выполнен с возможностью предоставления потенциальных траекторий 506-1 и 506-2 вместе с оценками 510-2 и 510-2 ранжирования и оценками 512-1 и 512-2 безопасности в модуль 310-2 идентификации траектории. Следует отметить, что для простоты только потенциальные траектории 506-1 и 506-2 показаны в качестве входных данных для модуля 310-2 идентификации траектории. Однако в различных неограничивающих вариантах осуществления любое количество потенциальных траекторий может быть предоставлено в качестве входных данных для модуля 310-2 идентификации траектории. Модуль 310-2 идентификации траектории может быть выполнен с возможностью идентификации лучшей траектории 520 среди потенциальных траекторий 506-1 и 506-2 и самой безопасной траектории 522 среди потенциальных траекторий 506-1 и 506-2 на основе комбинации соответствующих оценок 510-2 и 510-2 ранжирования и оценок 512-1 и 512-2 безопасности.
[000157] В некоторых неограничивающих вариантах осуществления лучшая траектория 520 может быть траекторией с наивысшей оценкой ранжирования среди оценок 510-1 и 510-2 ранжирования. Кроме того, самая безопасная траектория 522 может быть траекторией с наивысшей оценкой безопасности среди оценок 512-1 и 512-2 безопасности, и которая также помечена как безопасная (с помощью модели классификации). Например, если первая и вторая ранжированные траектории в соответствии с их ранжированием не помечены как безопасные, в то время как третья ранжированная траектория помечена как безопасная, модуль 310-2 идентификации траектории может выбрать третью ранжированную траекторию как самую безопасную траекторию 522.
[000158] В некоторых неограничивающих вариантах осуществления модуль 310 планирования движения может предписывать SDC 220 работать в соответствии с самой безопасной траекторией 522. В некоторых неограничивающих вариантах осуществления, если самая безопасная траектория 522 и лучшая траектория 520 не являются одной и той же потенциальной траекторией, модуль 310 планирования движения может предписывать SDC 220 выполнить корректирующее действие, работая в соответствии с самой безопасной траекторией 522. В некоторых неограничивающих вариантах осуществления корректирующее действие может привести к тому, что лучшая траектория 520 станет самой безопасной траекторией 522 в будущий момент времени.
[000159] В некоторых неограничивающих вариантах осуществления корректирующим действием может быть включение визуального индикатора 508 (как показано на фиг. 16). Визуальный индикатор 508 может указывать на намерение SDC 220 выполнить маневр с изменением полосы движения в отношении объекта 504. Таким образом, можно ожидать изменения кинематических характеристик объекта 504. С этой целью модуль 310-2 идентификации траектории может снова идентифицировать лучшую траекторию 520 и самую безопасную траекторию 522 на основе изменившихся условий на участке 500 дороги.
[000160] Кроме того, в некоторых неограничивающих вариантах осуществления на основе лучшей траектории 520 и самой безопасной траектории 522 модуль 310 планирования движения может быть выполнен с возможностью предписывать SDC 220 выполнять первое или второе действие. В некоторых неограничивающих вариантах осуществления первое действие вызывается модулем 310 планирования движения, если лучшая траектория 520 и самая безопасная траектория 522 являются одной и той же потенциальной траекторией (например, потенциальная траектория 506-1 или 506-2). В некоторых неограничивающих вариантах осуществления второе действие вызывается модулем 310 планирования движения, если лучшая траектория 520 и самая безопасная траектория 522 не являются одной и той же потенциальной траекторией (например, потенциальная траектория 506-1 или 506-2).
[000161] Фиг.15 иллюстрирует принципиальную схему механизма 310-4 перехода между состояниями, реализованного в модуле 310 планирования движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Механизм 310-4 перехода между состояниями может включать в себя различные состояния, такие как состояние 602 маневра удержания полосы движения, состояние 604 подготовки маневра с изменением полосы движения и состояние 606 маневра с изменением полосы движения.
[000162] Различные состояния, такие как состояние 602 маневра удержания полосы движения, состояние 604 подготовки маневра с изменением полосы движения и состояние 606 маневра с изменением полосы движения, могут соответствовать различным условиям движения SDC 220. В качестве примера, если текущим состоянием является состояние 602 маневра удержания полосы движения, SDC 220 может продолжать движение по текущей полосе движения (например, полосе 502-2 движения). В другом примере, если текущим состоянием является состояние 604 подготовки маневра с изменением полосы движения, модуль 310 планирования движения может выполнять различные оперативные корректировки текущей кинематики SDC 220. Такие регулировки могут включать, но не ограничиваются этим, применение торможения, снижение скорости, уменьшение ускорения и т.п. Кроме того, модуль 310 планирования движения может предписывать SDC 220 мигать визуальным индикатором 508, отображающим намерение выполнить потенциальный маневр с изменением полосы движения.
[000163] В некоторых неограничивающих вариантах осуществления входные данные в механизм 310-4 перехода между состояниями может быть лучшей траекторией 520, самой безопасной траекторией 522 и потенциальными траекториями 506-1 и 506-2. Следует отметить, что для простоты были рассмотрены только две потенциальные траектории 506-1 и 506-2, однако в различных неограничивающих вариантах осуществления любое количество траекторий может быть предоставлено в качестве входных данных для механизма 310-4 перехода между состояниями.
[000164] В одном неограничивающем примере потенциальная траектория 506-1 может содержать потенциальный маневр с изменением полосы движения, например, потенциальный маневр с изменением полосы движения с полосы 502-2 движения на полосу 502-3 движения (как показано на Фиг.11). Кроме того, потенциальная траектория 506-2 может содержать потенциальный маневр удержания полосы движения, например потенциальный маневр удержания полосы движения в полосе 502-2 движения, по которой в настоящее время двигается SDC 220.
[000165] Первоначально можно предположить, что механизм 310-4 перехода между состояниями находится в состоянии 602 маневра удержания полосы движения, а SDC 220 может двигаться по полосе 502-2 движения, и лучшая траектория 520, самая безопасная траектория 522 и потенциальные траектории 506-1 и 506-2 могут быть предоставлены в качестве входных данных для механизма 310-4 перехода между состояниями.
[000166] В некоторых неограничивающих вариантах осуществления, если и лучшая траектория 520, и самая безопасная траектория 522 являются потенциальной траекторией 506-1, механизм 310-4 перехода между состояниями может оставаться в состоянии 602 маневра удержания полосы движения. С этой целью первое действие, вызванное модулем 310 планирования движения, может пытаться выполнить потенциальный маневр удержания полосы движения на основе потенциальной траектории 506-1. Другими словами, SDC 220 может продолжать движение по текущей полосе 502-2 движения.
[000167] В некоторых неограничивающих вариантах осуществления, если и лучшая траектория 520, и самая безопасная траектория 522 являются потенциальной траекторией 506-2, механизм 310-4 перехода между состояниями может перейти в состояние 606 маневра с изменением полосы движения. С этой целью первое действие, вызванное модулем 310 планирования движения, может пытаться выполнить потенциальный маневр с изменением полосы движения на основе потенциальной траектории 506-2. В некоторых неограничивающих вариантах осуществления после выполнения потенциального маневра с изменением полосы движения механизм 310-4 перехода между состояниями может вернуться в состояние 602 маневра удержания полосы движения.
[000168] В некоторых неограничивающих вариантах осуществления, если лучшая траектория 520 является потенциальной траекторией 506-2, а самая безопасная траектория 522 является потенциальной траекторией 506-1, механизм 310-4 перехода между состояниями может перейти в состояние подготовки маневра 604 с изменением полосы движения. С этой целью второе действие, вызванное модулем 310 планирования движения, может включать визуальный индикатор 508 SDC 220 для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после заданного момента времени.
[000169] На фиг.16 показан типичный сценарий SDC 220, управляемого на участке 500 дороги, когда механизм 310-4 перехода между состояниями находится в состоянии 604 подготовки маневра с изменением полосы движения, в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. Поскольку в этом сценарии лучшая траектория 520 может отличаться от самой безопасной траектории 522, электронное устройство 210 может запускать визуальный индикатор 508, в то время как SDC 220 сохраняет свою полосу движения. Другими словами, SDC 220 может продолжать движение по текущей полосе 502-2 движения, в то время как модуль 310 планирования движения может включать визуальный индикатор 508 SDC 220 для отображения намерения выполнить потенциальный маневр с изменением полосы движения.
[000170] Не желая связываться с какой-либо конкретной теорией, разработчики настоящей технологии осознали, что запуск визуального индикатора 508 в сценарии, где лучшая траектория 520 является потенциальной траекторией 506-2, а самая безопасная траектория 522 является потенциальной траекторией 506-1, может повлиять на оператора другого транспортного средства (такого как объект 504), чтобы потенциально «уступить дорогу» или предоставить SDC 220 больше времени и/или пространства для выполнения маневра с изменением полосы движения. Как будет описано ниже, при следующем тике, например, когда электронное устройство 210 выполнено с возможностью определения новой лучшей траектории 524 и новой самой безопасной траектории 526, возможность активировать визуальный индикатор 508 при текущем тике может привести к тому, что объект 504 будет вести себя таким образом, который изменит классификацию потенциальной траектории 506-2 при следующем тике, то есть при следующем тике модель классификации может определить на основе поведения объекта 504 под таким влиянием, что потенциальная траектория 506-2 теперь безопасна. Следовательно, при следующем тике потенциальная траектория 506-2 может быть как лучшей, так и самой безопасной траекторией.
[000171] Предполагается, что специалист в данной области техники поймет, что любой тип визуального индикатора 508 может быть включен в SDC 220. Один неограничивающий пример визуального индикатора 508 может включать в себя светоизлучающие диоды (LED), установленные в качестве визуального индикатора 508 на левой и правой стороне внешнего корпуса SDC 220. Если намерение состоит в том, чтобы сменить полосу движения на полосу 502-3 движения слева от SDC 220, модуль 310 планирования движения может включить визуальный индикатор 508, установленный на левой стороне SDC 220. Кроме того, если намерение состоит в том, чтобы сменить полосу движения на полосу 502-3 движения справа от SDC 220, модуль 310 планирования движения может включить визуальный индикатор 508, установленный на правой стороне SDC 220.
[000172] Кроме того, в различных неограничивающих вариантах осуществления модуль 310 планирования движения может быть выполнен с возможностью выполнения различных операционных корректировок текущей кинематики SDC 220, чтобы приспособиться к текущим условиям дорожного движения на участке 500 дороги. Как показано на фиг. 16, предыдущая позиция SDC 220 представлена как предыдущая позиция 220-1. Кроме того, предыдущая позиция объекта 504 представлена как предыдущая позиция 504-1. Следует отметить, что предыдущая позиция 220-1 и предыдущая позиция 504-1 могут быть связаны с данным моментом времени.
[000173] В одном неограничивающем примере текущая позиция SDC 220 в другой момент времени может быть представлена как текущая позиция 220-2. Что касается текущей позиции объекта 504, были рассмотрены два различных неограничивающих примера. В первом примере объект 504 может быть немного далеко от SDC 220, и текущая позиция объекта 504 может быть представлена как текущая позиция 504-2. Во втором примере объект 504 может быть рядом с SDC 220, и текущая позиция объекта 504 может быть представлена как текущая позиция 504-3.
[000174] Как отмечалось ранее, в случае, если лучшая траектория 520 и самая безопасная траектория 522 являются разными траекториями, SDC 220 может выполнить потенциальный маневр удержания полосы движения и может продолжать движение по полосе 502-2 движения до другого момента времени. Кроме того, в другой момент времени объект 504 может находиться в текущей позиции 504-2 или 504-3 в зависимости от его кинематических характеристик.
[000175] В другой заданный момент времени после заданного момента времени модуль 310 планирования движения может быть выполнен с возможностью осуществления связи с обученным модулем 308 MLA для вычисления новых оценок ранжирования и новых оценок безопасности для потенциальных траекторий 506-1 и 506-2. В свою очередь, обученный ранжирующий MLA 308-1 (как показано на фиг. 12) может быть выполнен с возможностью прогнозирования новых оценок 510-3 и 510-4 ранжирования, связанных с потенциальными траекториями 506-1 и 506-2. Кроме того, обученный классифицирующий MLA 308-2 (как показано на фиг. 13) может быть выполнен с возможностью генерирования новых оценок 512-3 и 512-4 безопасности, связанных с потенциальными траекториями 506-1 и 506-2. Обученный ранжирующий MLA 308-1 и обученный классифицирующий MLA 308-2 могут предоставить новые оценки 510-3 и 510-4 ранжирования и новые оценки 512-3 и 512-4 безопасности в модуль 310 планирования движения.
[000176] В некоторых неограничивающих вариантах осуществления модуль 310 планирования движения может осуществлять связь с модулем 310-2 идентификации траектории, чтобы идентифицировать новую лучшую траекторию 524 среди потенциальных траекторий 506-1 и 506-2 и новую самую безопасную траекторию 526 среди потенциальных траектории 506-1 и 506-2 на основе комбинации соответствующих новых оценок 510-3 и 510-4 ранжирования и новых оценок 512-3 и 512-4 безопасности. Ссылаясь на фиг. 14, модуль 310-2 идентификации траектории может быть выполнен с возможностью идентификации новой лучшей траектории 524 и новой самой безопасной траектории 526.
[000177] Ссылаясь на Фиг.15, в некоторых неограничивающих вариантах осуществления, где, если механизм 310-4 перехода между состояниями находится в состоянии 604 подготовки маневра с изменением полосы движения, и если и новая лучшая траектория 524, и новая самая безопасная траектория 526 являются потенциальной траекторией 506-2, механизм 310-4 перехода между состояниями может перейти в состояние 606 маневра с изменением полосы движения. При этом модуль 310 планирования движения может предписывать SDC 220 выполнить потенциальный маневр с изменением полосы движения на основе потенциальной траектории 506-2. В некоторых неограничивающих вариантах осуществления после выполнения потенциального маневра с изменением полосы движения механизм 310-4 перехода между состояниями может вернуться в состояние 602 маневра удержания полосы движения.
[000178] В некоторых неограничивающих вариантах осуществления, если механизм 310-4 перехода между состояниями находится в состоянии 604 подготовки маневра с изменением полосы движения, и если и новая лучшая траектория 524, и новая самая безопасная траектория 526 являются потенциальной траекторией 506-1, механизм 310-4 перехода между состояниями может перейти в состояние 602 маневра удержания полосы движения. При этом модуль 310 планирования движения может предписывать SDC 220 выполнить потенциальный маневр удержания полосы движения на основе потенциальной траектории 506-1.
[000179] В некоторых неограничивающих вариантах осуществления, если механизм 310-4 перехода между состояниями находится в состоянии 602 маневра удержания полосы движения и если лучшая траектория 520 является потенциальной траекторией 506-1, а самая безопасная траектория 522 является потенциальной траекторией 506-2, механизм 310-4 перехода между состояниями может перейти в состояние 606 маневра с изменением полосы движения. При этом модуль 310 планирования движения может предписывать SDC 220 выполнить потенциальный маневр с изменением полосы движения на основе потенциальной траектории 506-2. В некоторых неограничивающих вариантах осуществления после выполнения потенциального маневра с изменением полосы движения механизм 310-4 перехода между состояниями может вернуться в состояние 602 маневра удержания полосы движения.
Реализуемый компьютером способ
[000180] На фиг.17 показана блок-схема способа 700 управления SDC 220 в соответствии с различными неограничивающими вариантами осуществления настоящей технологии. В некоторых неограничивающих вариантах осуществления настоящей технологии способ 700 может быть реализован электронным устройством 210, соединенным с возможностью осуществления связи с SDC 220. Способ 700 начинается с этапа 702.
Этап 702: генерирование с помощью электронного устройства первой потенциальной траектории и второй потенциальной траектории для SDC на участке дороги, соответственно.
[000181] На этапе 702 электронное устройство 210 генерирует первую потенциальную траекторию и вторую потенциальную траекторию для SDC 220 на участке 500 дороги соответственно. Как обсуждалось ранее, модуль 306 генерирования траектории может быть выполнен с возможностью генерирования потенциальных траекторий 506-1 и 506-2.
Этап 704: ранжирование с помощью электронного устройства с использованием ранжирующего алгоритма машинного обучения (MLA) первой потенциальной траектории и второй потенциальной траектории, причем ранжирующий MLA обучен прогнозировать оценку ранжирования сходства между соответствующей потенциальной траекторией и эталонной траекторией
[000182] Способ 700 переходит к этапу 704, на котором, используя ранжирующий MLA, электронное устройство 210 ранжирует первую потенциальную траекторию и вторую потенциальную траекторию, при этом ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией. Как обсуждалось ранее, обученный ранжирующий MLA 308-1 может ранжировать потенциальные траектории 506-1 и 506-2. Для этого обученный ранжирующий MLA 308-1 может прогнозировать оценки 510-1 и 510-2 ранжирования, связанные с потенциальными траекториями 506-1 и 506-2, соответственно. Оценки 510-1 и 510-2 ранжирования могут указывать на сходство между соответствующими потенциальными траекториями 506-1 и 506-2 и эталонной траекторией.
[000183] По меньшей мере в некоторых вариантах осуществления настоящей технологии электронное устройство 210 может быть выполнено с возможностью ранжирования множества потенциальных траекторий на основе их сходства с эталонной траекторией, которую человек-оператор мог бы выполнить на соответствующем участке дороги. Предполагается, что ранжирование множества потенциальных траекторий может выполняться попарно и/или в виде списка. Кроме того, можно сказать, что ранжирование множества траекторий выполняется с учетом сходства соответствующей одной из множества траекторий с эталонной траекторией для данного участка дороги.
[000184] По меньшей мере в некоторых вариантах осуществления можно также сказать, что ранжирование множества траекторий может выполняться без учета других объектов на участке дороги. Другими словами, целью ранжирования потенциальных траекторий может быть оценка того, насколько близки или схожи соответствующие потенциальные траектории с эталоном для данного участка дороги, но при этом определение, насколько безопасна соответствующая потенциальная траектория с точки зрения других объектов на участке дороги, может выполняться на отдельном этапе способа 700 и, в частности, с помощью отдельного MLA. Например, электронное устройство 210 может определить, насколько безопасна данная потенциальная траектория, используя классифицирующий MLA на этапе 706.
Этап 706: классификация с помощью электронного устройства с использованием классифицирующего MLA первой потенциальной траектории и второй потенциальной траектории, при этом классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной.
[000185] Способ 700 переходит к этапу 706, на котором, используя классифицирующий MLA, электронное устройство 210 классифицирует первую потенциальную траекторию и вторую потенциальную траекторию, при этом классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной. Как отмечалось ранее, обученный классифицирующий MLA 308-2 может классифицировать потенциальные траектории 506-1 и 506-2. Для этого обученный классифицирующий MLA 308-2 может генерировать оценки 512-1 и 512-2 безопасности, связанные с потенциальными траекториями 506-1 и 506-2 соответственно. Оценки 512-1 и 512-2 безопасности могут указывать на то, могут ли быть безопасными соответствующие потенциальные траектории 506-1 и 506-2.
Этап 708: идентификация с помощью электронного устройства лучшей траектории среди первой потенциальной траектории и второй потенциальной траектории и самой безопасной траектории среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности.
[000186] Способ 700 переходит к этапу 708, на котором электронное устройство 210 идентифицирует лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности. Как отмечалось ранее, модуль 310-2 идентификации траектории может идентифицировать лучшую траекторию 520 среди потенциальных траекторий 506-1 и 506-2 и самую безопасную траекторию 522 среди потенциальных траекторий 506-1 и 506-2 на основе комбинации соответствующих оценок 510-1 и 510-2 ранжирования и оценок 512-1 и 512-2 безопасности.
Этап 710: предписывание с помощью электронного устройства SDC выполнить первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией.
[000187] Способ 700 переходит к этапу 710, на котором электронное устройство 210 предписывает SDC 220 выполнить первое действие, если лучшая траектория 520 и самая безопасная траектория 522 являются одной и той же потенциальной траекторией. Как отмечалось ранее, первое действие вызывается модулем 310 планирования движения, если лучшая траектория 520 и самая безопасная траектория 522 являются одной и той же потенциальной траекторией (например, потенциальная траектория 506-1 или 506-2).
[000188] На определенных неограничивающих этапах, если и лучшая траектория 520, и самая безопасная траектория 522 являются потенциальной траекторией 506-2 (потенциальная траектория 506-2 может включать в себя потенциальный маневр с изменением полосы движения), первое действие, вызванное модулем 310 планирования движения, может попытаться выполнить потенциальный маневр с изменением полосы движения на основе потенциальной траектории 506-2.
[000189] На определенных неограничивающих этапах, если и лучшая траектория 520, и самая безопасная траектория 522 являются потенциальной траекторией 506-1 (потенциальная траектория 506-1 может включать в себя потенциальный маневр удержания полосы движения), первое действие, вызванное модулем 310 планирования движения, может попытаться выполнить потенциальный маневр удержания полосы движения на основе потенциальной траектории 506-1.
Этап 712: предписывание с помощью электронного устройства SDC выполнить второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией.
[000190] Способ 700 переходит к этапу 710, на котором электронное устройство 210 предписывает SDC 220 выполнить второе действие, если лучшая траектория 520 и самая безопасная траектория 522 не являются одной и той же потенциальной траекторией. Как отмечалось ранее, второе действие вызывается модулем 310 планирования движения, если лучшая траектория 520 и самая безопасная траектория 522 не являются одной и той же потенциальной траекторией (например, потенциальная траектория 506-1 или 506-2).
[000191] На определенном неограничивающем этапе, если лучшая траектория 520 является потенциальной траекторией 506-2 (потенциальная траектория 506-2 может включать в себя потенциальный маневр с изменением полосы движения), а самая безопасная траектория 522 является потенциальной траекторией 506-1 (потенциальная траектория 506-1 может содержать потенциальный маневр удержания полосы движения), модуль 310 планирования движения может вызвать второе действие. Второе действие, вызванное модулем 310 планирования движения, может включать визуальный индикатор 508 SDC 220 для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после данного момента времени.
[000192] Таким образом, с помощью электронного устройства 210 и способа 700 может быть принято решение о безопасной смене полосы движения, что значительно снижает вероятность столкновений и обеспечивает безопасное и плавное выполнение смены полосы движения SDC 220.
[000193] Модификации и улучшения вышеописанных реализаций настоящей технологии могут стать очевидными для специалистов в данной области техники. Предшествующее описание предназначено для того, чтобы быть примерным, а не ограничивающим. Поэтому предполагается, что объем настоящей технологии ограничен лишь объемом прилагаемой формулы изобретения.
[000194] Хотя вышеописанные реализации были описаны и показаны со ссылкой на конкретные этапы, выполняемые в определенном порядке, следует понимать, что некоторые из этих этапов могут быть объединены, разделены на части или переупорядочены без отклонения от принципов настоящей технологии. Соответственно, порядок и группировка упомянутых этапов не являются ограничениями настоящей технологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система для прогнозирования маневра объекта | 2021 |
|
RU2778300C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2021 |
|
RU2767826C1 |
| СПОСОБЫ И ПРОЦЕССОРЫ ДЛЯ УПРАВЛЕНИЯ РУЛЕНИЕМ БЕСПИЛОТНЫМ АВТОМОБИЛЕМ | 2019 |
|
RU2751734C2 |
| Способ и электронное устройство для управления беспилотным автомобилем | 2021 |
|
RU2790105C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2744012C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДЛЯ БЕСПИЛОТНОГО АВТОМОБИЛЯ (SDC) | 2019 |
|
RU2750243C2 |
| Способ и система для генерации опорного пути беспилотного автомобиля (SDC) | 2019 |
|
RU2746026C1 |
| Способы и серверы для ранжирования цифровых документов в ответ на запрос | 2020 |
|
RU2775815C2 |
| Способы и системы для формирования списка цифровых задач | 2021 |
|
RU2837803C2 |




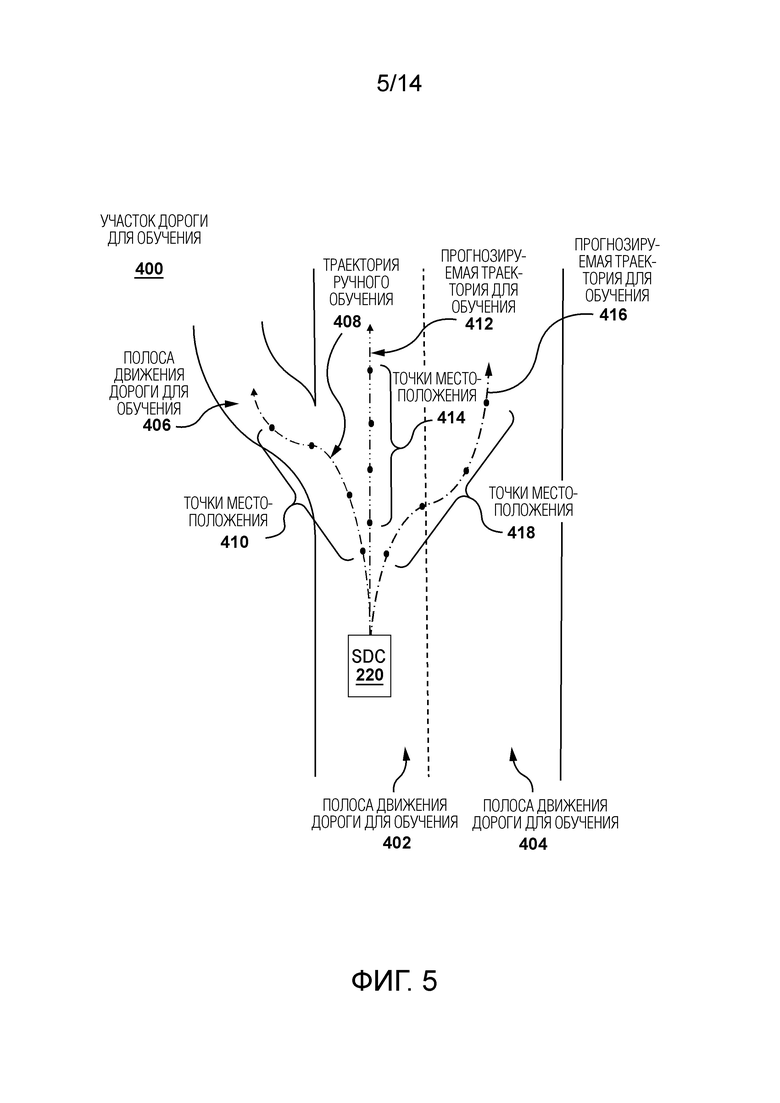







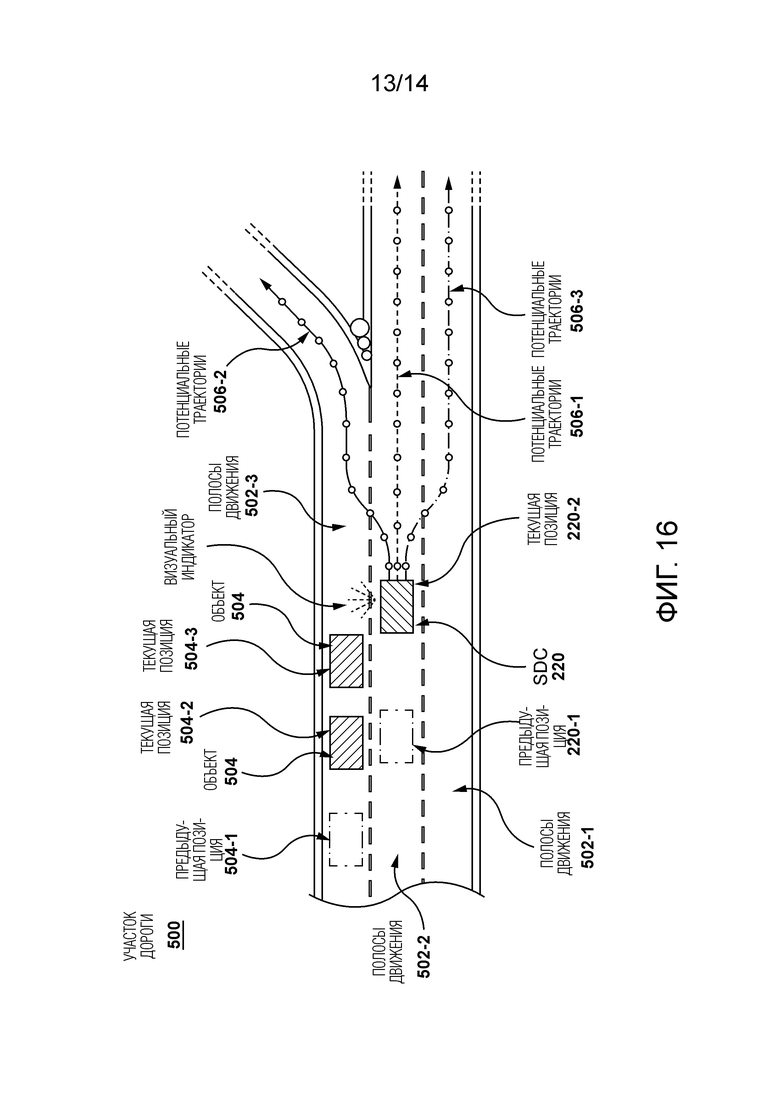

Группа изобретений относится к электронному устройству и способам управления беспилотным автомобилем на участке дороги. Сенсорная система устанавливается на беспилотном автомобиле и собирает информацию об окружении. Беспилотный автомобиль связан с электронным устройством. Способ включает в себя этапы, на которых в данный момент времени во время работы беспилотного автомобиля на участке дороги: генерируют, ранжируют и классифицируют первую и вторую потенциальные траектории; идентифицируют лучшую и самую безопасную траектории, среди первой и второй потенциальных траекторий; предписывают выполнить первое или второе действие. Ранжирующий алгоритм указывает на сходство между соответствующей потенциальной и эталонной траекториями. Классифицирующий алгоритм генерирует оценку безопасности. Идентифицируют лучшую и самую безопасную среди потенциальных траекторий на основе комбинации соответствующих оценок ранжирования и оценок безопасности. Выполняется первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией. Выполняется второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией. Достигается повышение безопасности маневра при предотвращении столкновения беспилотного автомобиля с другими объектами. 4 н. и 18 з.п. ф-лы, 17 ил.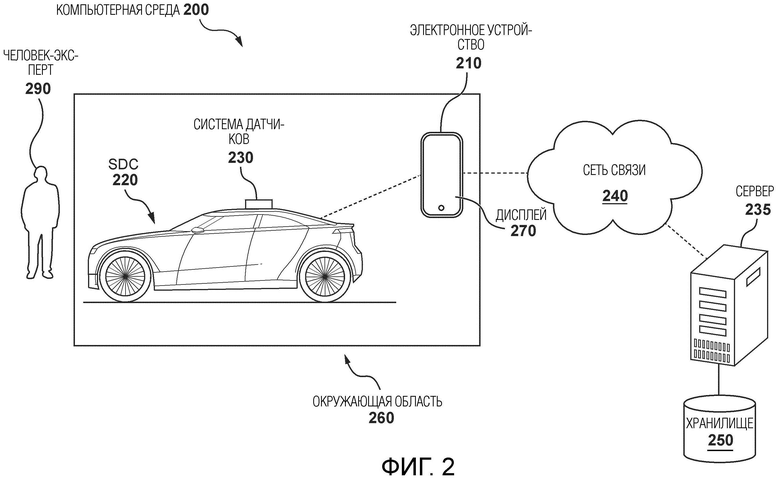
1. Способ управления беспилотным автомобилем (SDC) на участке дороги, при этом сенсорная система устанавливается на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем способ включает в себя этапы, на которых
в данный момент времени во время работы SDC на участке дороги:
генерируют с помощью электронного устройства первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги соответственно;
ранжируют с помощью электронного устройства с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию,
причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией;
классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию,
причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет;
идентифицируют с помощью электронного устройства лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности;
предписывают с помощью электронного устройства SDC выполнить первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией; и
предписывают с помощью электронного устройства SDC выполнить второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией.
2. Способ по п. 1, в котором ранжирующий MLA представляет собой алгоритм попарного ранжирования, который обучают на основе первого набора обучающих данных, причем первый набор обучающих данных содержит
эталонную траекторию, представляющую собой траекторию для обучения, вручную выполняемую человеком-экспертом, двигающимся в SDC на участке дороги для обучения в момент времени обучения;
первую прогнозируемую траекторию для обучения и вторую прогнозируемую траекторию для обучения, сгенерированные электронным устройством для SDC для участка дороги для обучения в момент времени обучения;
ранжирующий MLA обучают на первом наборе обучающих данных для ранжирования первой прогнозируемой траектории для обучения и второй прогнозируемой траектории для обучения для участка дороги для обучения на основе соответствующего сходства с эталонной траекторией.
3. Способ по п. 1, в котором классифицирующий MLA обучают на основе второго набора обучающих данных, причем второй набор обучающих данных содержит
траекторию для обучения, сгенерированную с помощью электронного устройства SDC на участке дороги для обучения в момент времени обучения;
метку, указывающую по меньшей мере на одно из неявного и явного вводов человека-эксперта, двигающегося в SDC на участке дороги для обучения во время момента времени обучения.
4. Способ по п.1, в котором классифицирующий MLA представляет собой алгоритм на основе дерева решений.
5. Способ по п. 1, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором:
если и лучшая траектория, и самая безопасная траектория являются первой потенциальной траекторией,
первое действие - попытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории;
если и лучшая траектория, и самая безопасная траектория являются второй потенциальной траекторией,
первое действие - попытаться выполнить потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
6. Способ по п. 1, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором,
если лучшая траектория является первой потенциальной траекторией, а самая безопасная траектория является второй потенциальной траекторией,
второе действие - включить визуальный индикатор SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после заданного момента времени.
7. Способ по п. 1, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором,
если лучшая траектория является второй потенциальной траекторией, а самая безопасная траектория является первой потенциальной траекторией,
второе действие - попытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
8. Способ по п. 6, при этом способ дополнительно содержит этапы, на которых
в другой заданный момент времени после заданного момента времени:
идентифицируют с помощью электронного устройства новую лучшую траекторию среди первой и второй потенциальных траекторий и новую самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих новых оценок ранжирования и новых оценок безопасности;
в ответ на новую лучшую траекторию и новую самую безопасную траекторию, которые обе являются первой потенциальной траекторией,
предписывают с помощью электронного устройства SDC выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
9. Способ управления беспилотным автомобилем (SDC) на участке дороги, при этом сенсорная система устанавливается на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем способ включает в себя этапы, на которых
в данный момент времени во время работы SDC на участке дороги:
ранжируют с помощью электронного устройства с использованием ранжирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию,
причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией, без учета безопасности соответствующей потенциальной траектории;
классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию,
причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет;
предписывают с помощью электронного устройства SDC выполнять действие на основе комбинации оценок ранжирования и оценок безопасности для первой потенциальной траектории и второй потенциальной траектории.
10. Способ по п. 9, в котором классификация первой и второй потенциальных траекторий выполняется параллельно с ранжированием первой потенциальной траектории и второй потенциальной траектории.
11. Способ по п. 9, в котором классификация первой и второй потенциальных траекторий выполняется независимо от ранжирования первой потенциальной траектории и второй потенциальной траектории.
12. Способ по п. 9, в котором участок дороги имеет две полосы движения, а первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения,
в ответ на определение с помощью электронного устройства, что первая потенциальная траектория ранжируется выше второй потенциальной траектории и что первая потенциальная траектория является безопасной, предписывание включает в себя этап, на котором
предписывают с помощью электронного устройства SDC пытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
13. Электронное устройство для управления беспилотным автомобилем (SDC) на участке дороги, причем сенсорная система установлена на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем электронное устройство выполнено с возможностью
в данный момент времени во время работы SDC на участке дороги:
генерировать первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги соответственно;
ранжировать с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию,
причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией;
классифицировать с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию,
причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет;
идентифицировать лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности;
предписывать SDC выполнить первое действие, если лучшая траектория и самая безопасная траектория являются одной и той же потенциальной траекторией; и
предписывать SDC выполнить второе действие, если лучшая траектория и самая безопасная траектория не являются одной и той же потенциальной траекторией.
14. Электронное устройство по п. 13, в котором ранжирующий MLA представляет собой алгоритм попарного ранжирования и обучен на основе первого набора обучающих данных, причем первый набор обучающих данных содержит
эталонную траекторию, представляющую собой траекторию для обучения, вручную выполняемую человеком-экспертом, двигающимся в SDC на участке дороги для обучения в момент времени обучения; и
первую прогнозируемую траекторию для обучения и вторую прогнозируемую траекторию для обучения, сгенерированные электронным устройством для SDC для участка дороги для обучения в момент времени обучения; и
ранжирующий MLA обучен на первом наборе обучающих данных для ранжирования первой прогнозируемой траектории для обучения и второй прогнозируемой траектории для обучения на основе сходства между (i) первой прогнозируемой траекторией для обучения и второй прогнозируемой траекторией для обучения и (ii) эталонной траекторией.
15. Электронное устройство по п. 13, в котором классифицирующий MLA обучен на основе второго набора обучающих данных, причем второй набор обучающих данных содержит:
траекторию для обучения, сгенерированную электронным устройством SDC на участке дороги для обучения в момент времени обучения;
метку, указывающую по меньшей мере на одно из неявного и явного вводов человека-эксперта, двигающегося в SDC на участке дороги для обучения во время момента времени обучения.
16. Электронное устройство по п. 13, в котором классифицирующий MLA представляет собой алгоритм на основе дерева решений.
17. Электронное устройство по п. 13, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором:
если и лучшая траектория, и самая безопасная траектория являются первой потенциальной траекторией,
первое действие - попытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории;
если и лучшая траектория, и самая безопасная траектория являются второй потенциальной траекторией,
первое действие - попытаться выполнить потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
18. Электронное устройство по п. 13, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором,
если лучшая траектория является первой потенциальной траекторией, а самая безопасная траектория является второй потенциальной траекторией,
второе действие - включить визуальный индикатор SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения при выполнении потенциального маневра удержания полосы движения до другого заданного момента времени после заданного момента времени.
19. Электронное устройство по п. 13, в котором участок дороги имеет две полосы движения и первая потенциальная траектория содержит потенциальный маневр с изменением полосы движения, а вторая потенциальная траектория содержит потенциальный маневр удержания полосы движения и в котором,
если лучшая траектория является второй потенциальной траекторией, а самая безопасная траектория является первой потенциальной траекторией,
второе действие - попытаться выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории.
20. Электронное устройство по п. 18, при этом электронное устройство дополнительно выполнено с возможностью
в другой заданный момент времени после заданного момента времени:
идентифицировать новую лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и новую самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих новых оценок ранжирования и новых оценок безопасности;
в ответ на новую лучшую траекторию и новую самую безопасную траекторию, которые обе являются первой потенциальной траекторией,
предписывать SDC выполнить потенциальный маневр с изменением полосы движения на основе первой потенциальной траектории;
в ответ на новую лучшую траекторию и новую самую безопасную траекторию, которые обе являются второй потенциальной траекторией,
предписывать SDC выполнить потенциальный маневр удержания полосы движения на основе второй потенциальной траектории.
21. Способ управления беспилотным автомобилем (SDC) на участке дороги, при этом сенсорная система установлена на SDC для сбора информации об окружении SDC, причем SDC связан с электронным устройством, причем способ включает в себя этапы, на которых
в данный момент времени во время работы SDC на участке дороги:
генерируют с помощью электронного устройства первую потенциальную траекторию и вторую потенциальную траекторию для SDC на участке дороги соответственно;
ранжируют с помощью электронного устройства с использованием ранжирующего алгоритма машинного обучения (MLA) первую потенциальную траекторию и вторую потенциальную траекторию,
причем ранжирующий MLA обучен прогнозировать оценку ранжирования, указывающую на сходство между соответствующей потенциальной траекторией и эталонной траекторией;
классифицируют с помощью электронного устройства с использованием классифицирующего MLA первую потенциальную траекторию и вторую потенциальную траекторию,
причем классифицирующий MLA обучен генерировать оценку безопасности, указывающую, является ли соответствующая потенциальная траектория безопасной или нет;
идентифицируют с помощью электронного устройства лучшую траекторию среди первой потенциальной траектории и второй потенциальной траектории и самую безопасную траекторию среди первой потенциальной траектории и второй потенциальной траектории на основе комбинации соответствующих оценок ранжирования и оценок безопасности;
предписывают с помощью электронного устройства SDC работать в соответствии с самой безопасной траекторией;
если самая безопасная траектория и лучшая траектория не являются одной и той же потенциальной траекторией, предписывают с помощью электронного устройства SDC выполнять корректирующее действие, работая в соответствии с самой безопасной траекторией, причем корректирующее действие предназначено, чтобы лучшая траектория стала самой безопасной траекторией в будущем.
22. Способ по п. 21, в котором корректирующее действие состоит во включении визуального индикатора SDC для отображения намерения выполнить потенциальный маневр с изменением полосы движения.
| KR 20140060107 A, 19.05.2014 | |||
| DE 19921449 C1, 25.01.2001 | |||
| DE 102012214979 A1, 27.02.2014 | |||
| DE 102013005248 A1, 02.10.2014 | |||
| WO 2013051083 A1, 11.04.2013. |

