Заявляемое техническое решение относится к области экспериментальной медицины, а именно к аппаратам газожидкостной искусственной вентиляции легких всех типов, и может быть использовано для изучения способов и режимов искусственной жидкостной вентиляции легких, а также для проведения испытаний и отладки аппаратов, обеспечивающих лечение и снижение смертности пациентов, как взрослых, так и новорожденных.
К настоящему времени известны широко используемые модели легких для аппаратов газовой искусственной вентиляции легких, однако, для жидкостной искусственной вентиляции легких такие модели отсутствуют.
Известно устройство для проверки и измерения параметров аппарата искусственной вентиляции легких по патенту RU №15961 с приоритетом от 17.12.1999, опубликованному 27.11.2000 (Бюл. №33), МПК А61М 16/00, содержащее модель легких механическую, имеющую пневмосопротивление, установленное на ее входе и соединенное с мехом, нагруженным пружинным механизмом, а также измеритель давления, соединенный с входом модели, который выполнен в виде последовательного соединения управляемого клапана с датчиком фаз дыхательного цикла, при этом измеритель давления выполнен в виде электронного измерителя, а мех модели связан с датчиками дыхательного объема, соединенными с микропроцессорным блоком, имеющим устройство ввода параметров, установленных на аппарате для искусственной вентиляции легких (ИВЛ), и снабженным индикацией измеренных и установленных параметров аппарата ИВЛ, а также имеющего систему индикации соответствия установленных и измеренных параметров с учетом допусков их погрешности, причем микропроцессорный блок и его индикации образуют с блоком ввода соответствующий блок управления, который связан с управляемым клапаном.
К достоинствам данного технического решения следует отнести возможность контроля и наличие автоматизированного процесса измерения и вычисления основных параметров аппарата ИВЛ в течение заданного числа дыхательных циклов, а также установления работоспособности (пригодности) аппарата ИВЛ к эксплуатации.
Однако, его основным недостатком является отсутствие возможности использования для жидкостной ИВЛ и, как следствие, отсутствие имитатора трахеи, приводящее на практике к повреждению легких при проведении медицинской процедуры.
Известна модель легких по патенту RU №24385 с приоритетом от 25.03.2002, опубликованная 10.08.2002 (Бюл. №22), МПК А61М 1/04, содержащая два эластичных меха с торцевыми поверхностями, пневмосопротивление, мановакуумметр, два пневмозадатчика разрежения, два индикатора разрежения и два исполнительных устройства, каждое из которых размещено внутри эластичного меха и связано механически с торцевыми поверхностями эластичного меха, при этом выводы обоих эластичных мехов связаны с общим входом модели легких через регулируемые пневмосопротивления и соединены с соответствующими мановакуумметрами, а входы обоих исполнительных устройств связаны с соответствующими задатчиками разрежения и соединены с соответствующими индикаторами разрежения. Кроме того, исполнительные устройства выполнены в виде эластичных средств, связанных своими входами с индикаторами разрежения, а индикаторы разрежения отградуированы в единицах растяжимости легких.
К преимуществам модели по патенту RU №24385 можно отнести наличие возможности изменения сопротивления и податливости устройства, а также контроля давления (разряжения) в мехах. Однако, недостатком является отсутствие модели трахеи, и, как следствие, невозможность имитации ее повреждений и патологий.
Известна симуляционная модель дыхательной системы по патенту RU №206390 с приоритетом от 20.05.2021, опубликованная 08.09.2021 (Бюл. №25), МПК G09B 23/28, содержащая модель левого и модель правого легких, каждая из которых снабжена нагревательным элементом, выполненным с возможностью настройки, воздуховод, имитатор трахеи в виде трубки с перегородкой и двумя расположенными с разных сторон от перегородки отверстиями для воздуховода, при этом воздуховод соединен с насосом и содержит два электромагнитных клапана, размещенных с двух сторон от насоса и срабатывающих в момент, когда один из них открыт, а другой закрыт и наоборот, причем насос имеет поршень, перемещаемый возвратно-поступательно, а на имитаторе трахеи предусмотрено место для термодатчика, измеряющего температуру входящего и выходящего воздуха.
Преимуществом данной модели дыхательной системы человека является возможность симуляции спонтанной дыхательной активности пациента с измерением температуры окружающего воздуха и управлением температурой выдыхаемого воздуха, однако, ее недостатком является невозможность имитации (симуляции) изменения физиологических параметров пациента при жидкостной ИВЛ, таких как диаметр трахеи, ее жесткость, а также наличие сопротивления и податливости моделей легких.
Задачей, на решение которой направлено заявленное техническое решение, является создание модели, имитирующей параметры дыхательной системы человека для жидкостной искусственной вентиляции легких, в том числе имитации трахеи.
Технический результат, достигаемый при решении поставленной задачи, заключается в улучшении качества лечения пациентов и снижение смертности за счет наличия возможности проведения испытаний и отладки аппаратов жидкостной ИВЛ путем имитации дыхательных циклов пациента с изменяемыми параметрами дыхательной системы, в том числе трахеи.
Задача решается, а технический результат достигается за счет того, что модель дыхательной системы для жидкостной искусственной вентиляции легких содержит регулятор потока среды, связанный с аппаратом искусственной вентиляции легких и имитатором трахеи.
При этом, в отличие от ближайшего аналога, устройство дополнительно содержит второй регулятор среды, вход которого соединен с имитатором трахеи, управляемым исполнительным механизмом, а выход - с имитатором легких пациента, выход которого соединен с имитатором остаточного объема жидкости в легких, при этом первый регулятор потока среды соединен с аппаратом искусственной вентиляции легких посредством тройника пациента.
При этом:
- регуляторы потока среды выполнены в виде шаровых кранов;
- модель трахеи выполнена в виде тонкостенной эластичной трубки, с герметично закрепленными на ее концах патрубками, жестко связанными с исполнительным механизмом;
- имитатор легких пациента выполнен в виде эластичного меха, изготовленного, например, из резинового или силиконового материала;
- имитатор остаточного объема жидкости в легких выполнен в виде эластичного мешка, выполненного, например, из силикона.
Тройник пациента обеспечивает герметичное подключение модели дыхательной системы к аппарату жидкостной искусственной вентиляции легких.
Имитатор трахеи, управляемый исполнительным механизмом, служит обеспечению прохождения жидкости через трахею с учетом изменения просвета (диаметра) трахеи.
Исполнительный механизм изменяет жесткость имитатора трахеи, влияющей на величину потока дыхательной жидкости.
Регуляторы потока среды, выполненные в виде шаровых кранов, изменяют поток среды, в данном случае жидкости, проходящей сначала через сечение трахеи, а затем через сечение бронха.
Имитатор легких пациента имитирует дыхательный (функциональный) объем легких пациента.
Имитатор остаточного объема жидкости в легких имитирует остаточный объем жидкости в легких пациента.
Сущность заявленного решения поясняется иллюстрацией.
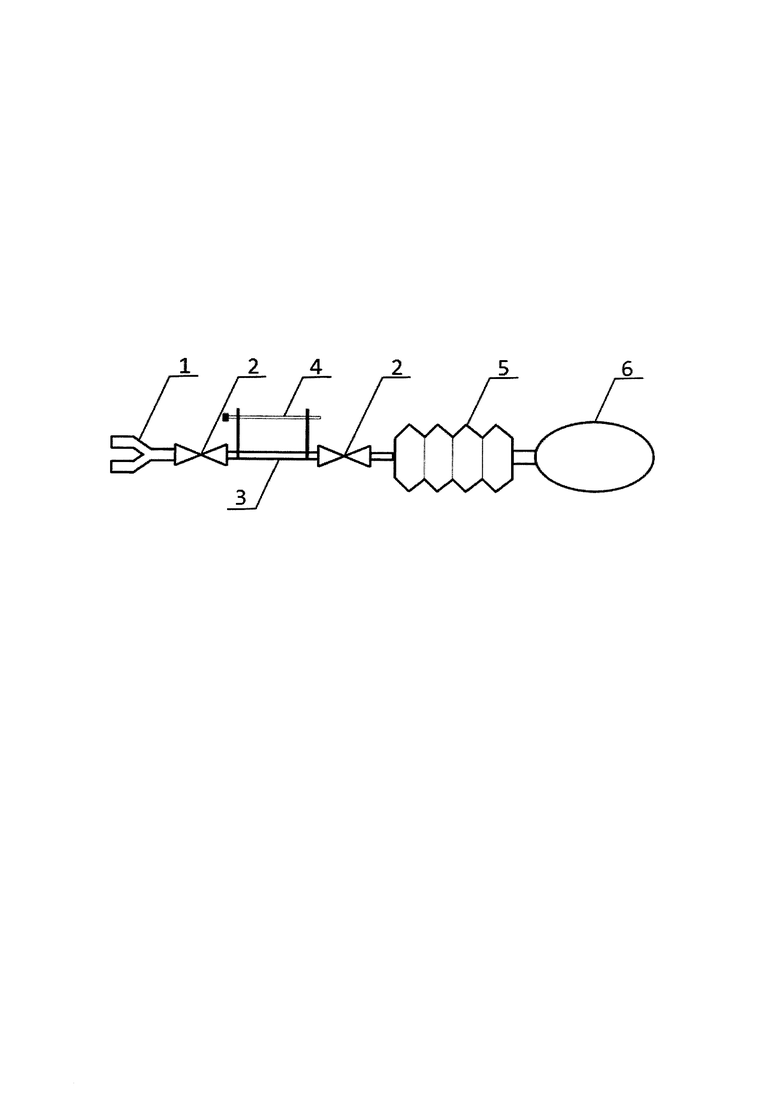
На фиг. изображена принципиальная схема устройства, где:
1 - тройник пациента;
2 - шаровые краны;
3 - имитатор трахеи;
4 - исполнительный механизм имитатора трахеи;
5 - эластичный мех (например, резиновый);
6 - эластичный мешок (например, силиконовый).
Модель дыхательной системы для жидкостной ИВЛ содержит тройник пациента 1, соединенный с аппаратом ИВЛ (на фигуре не показано), шаровые краны 2, имитатор трахеи 3, управляемый исполнительным механизмом 4, предназначенным для изменения его жесткости, эластичный мех 5 и эластичный мешок 6 для имитации дыхательного и остаточного объема легких пациента.
Модель дыхательной системы для жидкостной ИВЛ с помощью тройника пациента 1 подключается к аппарату жидкостной ИВЛ. Тройник пациента 1 через первый шаровой кран 2 соединяется с имитатором трахеи 3, имитирующим просвет (диаметр) трахеи. Имитатор трахеи 3 представляет собой тонкостенную эластичную, например, силиконовую трубку с герметично закрепленными на концах патрубками, жестко связанными с исполнительным механизмом 4, растягивающим трубку в продольном направлении и, тем самым, изменяющим ее жесткость. Имитатор трахеи 3 посредством второго шарового крана 2 соединяется с эластичным мехом 5, выполненным, например, из резины, и силиконовым мешком 6, предназначенным для имитации дыхательного и остаточного объема легких пациента.
Устройство работает следующим образом:
На фазе вдоха дыхательная жидкость из аппарата жидкостной искусственной вентиляции легких через тройник пациента 1 и шаровой кран 2, имитирующий изменение внутреннего диаметра трахеи, попадает в имитатор трахеи 3, выполненный в виде тонкостенной силиконовой трубки, концы которой жестко соединены с исполнительным механизмом 4, растягивающим или сжимающим трубку в продольном направлении. Затем дыхательная жидкость через второй шаровой кран 2, имитирующий сечение бронха, попадает в резиновый мех 5, имитирующий легкое пациента. Мех 5 разжимается в продольном направлении и накапливает объем жидкости, заданный аппаратом жидкостной ИВЛ. Часть жидкости, проходящая сквозь мех 5, накапливается в силиконовом мешке 6, имитируя остаточный объем жидкости в легких. На фазе выдоха аппарат жидкостной ИВЛ создает в модели отрицательное давление (разрежение), за счет чего сужается просвет имитатора трахеи 3 и дыхательная жидкость из меха 5 через шаровые краны 2 и тройник пациента 1 выкачивается в аппарат жидкостной ИВЛ, при этом часть жидкости в зависимости от настроек модели и аппарата жидкостной ИВЛ остается в мешке 6, имитируя ключевой параметр - остаточный объем жидкости в легких.
Варьируя просветы (сечения) клапанов 2 и натяжения исполнительного механизма 4 имитатора трахеи 3 можно изменять параметры модели и подбирать настройки аппарата жидкостной ИВЛ для поддержания остаточного объема жидкости в легких на приемлемом физиологическом уровне, избегая нежелательных осложнений.
Проведенные экспериментальные исследования подтвердили теоретические расчеты и безопасность заявленного технического решения.
Устройство на основе заявленного технического решения реализовано в лабораторных условиях с применением стандартного оборудования и разрешенных к применению материалов.
Использование стандартного оборудования и материалов снижает стоимость изготовления устройства на основе заявленного технического решения, а также значительно повышает его технологичность.
Заявленное техническое решение обладает универсальностью и эксплуатационной надежностью и может успешно применяться в экспериментальной медицине.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат газожидкостной искусственной вентиляции легких | 2023 |
|
RU2840039C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2002 |
|
RU2219892C1 |
| ТРЕНАЖЕР ХИРУРГИЧЕСКОЙ ОПЕРАЦИОННОЙ | 2014 |
|
RU2546404C1 |
| Способ ингаляционного воздействия на организм и аппарат для его осуществления | 2016 |
|
RU2708784C2 |
| АППАРАТ ИВЛ | 1996 |
|
RU2128493C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2010 |
|
RU2453275C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 1999 |
|
RU2146913C1 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ | 2003 |
|
RU2240767C1 |
| УСТРОЙСТВО ДЛЯ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ (ИВЛ) ПРИ ИНГАЛЯЦИОННОМ НАРКОЗЕ ПО ПОЛУЗАКРЫТОМУ (ЗАКРЫТОМУ) КОНТУРУ | 1998 |
|
RU2158611C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ ДЛЯ НОВОРОЖДЕННЫХ | 2012 |
|
RU2523674C1 |
Изобретение относится к экспериментальной медицине и медицинской технике. Модель дыхательной системы для жидкостной искусственной вентиляции легких содержит имитатор легких пациента, первый регулятор потока среды, связанный с аппаратом искусственной вентиляции легких посредством тройника пациента, и имитатор трахеи. Введены имитатор остаточного объема жидкости в легких, исполнительный механизм имитатора трахеи и второй регулятор потока среды. Вход второго регулятора потока среды соединен с имитатором трахеи, выполненным в виде эластичной трубки, концы которой соединены с исполнительным механизмом имитатора трахеи, имеющим возможность растягивать или сжимать имитатор трахеи в продольном направлении. Выход имитатора трахеи соединен с имитатором легких пациента, выполненным с возможностью накапливать дыхательную жидкость и соединенным с имитатором остаточного объема жидкости в легких, имеющим вид эластичного мешка. Технический результат состоит в обеспечении имитации параметров дыхательной системы человека для жидкостной искусственной вентиляции легких. 4 з.п. ф-лы, 1 ил.
1. Модель дыхательной системы для жидкостной искусственной вентиляции легких, содержащая имитатор легких пациента, первый регулятор потока среды, связанный с аппаратом искусственной вентиляции легких посредством тройника пациента, и имитатор трахеи, отличающаяся тем, что введены имитатор остаточного объема жидкости в легких, исполнительный механизм имитатора трахеи и второй регулятор потока среды, при этом вход второго регулятора потока среды соединен с имитатором трахеи, выполненным в виде эластичной трубки, концы которой соединены с исполнительным механизмом имитатора трахеи, имеющим возможность растягивать или сжимать имитатор трахеи в продольном направлении, выход имитатора трахеи соединен с имитатором легких пациента, выполненным с возможностью накапливать дыхательную жидкость и соединенным с имитатором остаточного объема жидкости в легких, имеющим вид эластичного мешка.
2. Модель по п. 1, отличающаяся тем, что первый и второй регуляторы потока среды выполнены в виде шаровых кранов.
3. Модель по п. 1, отличающаяся тем, что модель трахеи выполнена в виде силиконовой трубки с герметично закрепленными на ее концах патрубками, связанными с исполнительным механизмом имитатора трахеи.
4. Модель по п. 1, отличающаяся тем, что имитатор легких пациента выполнен в виде эластичного меха, изготовленного из резины или силикона.
5. Модель по п. 1, отличающаяся тем, что имитатор остаточного объема жидкости в легких выполнен из силикона.
| РОЛИКООПОРА ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU206390A1 |
| Регистратор для бумаг | 1930 |
|
SU24385A1 |
| Устройство для автоматического управления мотором насоса | 1929 |
|
SU15961A1 |
| РОБОТ-ТРЕНАЖЕР | 2005 |
|
RU2278420C1 |
| US 20180315346 A1, 01.11.2018. | |||
