Изобретение относиться к области медицины, а именно к тренажерам, предназначенным для обучения навыкам реанимации и отработки приемов оказания первой медицинской помощи пострадавшим людям.
Известен тренажер для обучения приемам помощи человеку при неотложных состояниях [1], состоящий из персонального компьютера, муляжа человека с блоком головы, блоком туловища, верхними и нижними конечностями, снабженными имитаторами пульса и наружных кровотечений. Устройство содержит в своем составе схему дефибрилляции, анатомический дисплей и систему управления процессом обучения, при этом блок головы снабжен имитатором наружного височного кровотечения и содержит датчики наложения давящей повязки прижатия височной артерии, которые установлены в области козелка уха. Блок туловища включает в свой состав имитатор наружного кровотечения с датчиком наложения окклюзионной повязки, а также имитатор тонов сердца. Нижние и верхние конечности известного тренажера снабжены датчиками наложения иммобилизационных шин, наложения кровоостанавливающих жгутов и пальцевых прижатий артерий. В известном тренажере анатомический дисплей интегрирован со схемой дефибрилляции и снабжен двумя выносными электродами, а датчики дефибрилляции закреплены в муляже человека, причем все датчики подключаются к системе управления, обеспечивая связку анатомического дисплея и муляжа человека. Одной из особенностью данного тренажера является то, что имитатор тонов сердца выполнен в виде электродинамической головки, закрепленной в области сердца на внутренней поверхности имитатора грудной клетки. Тренажер также содержит модель пряжки поясного ремня, взаимодействующую с блоком туловища и помещенную в области талии муляжа человека, а также датчик выдвижения нижней челюсти, который выполнен, по меньшей мере, содержащим две оптоэлектронные пары, установленные на восходящих ветвях нижней челюсти. Помимо указанных датчиков устройство также содержит датчик наружного массажа сердца, датчик чрезмерного усилия и датчик перикардиального удара, которые размещены на основной панели блока туловища и оперативно взаимодействуют с кронштейном. Со стороны спины на блоке туловища устанавливают датчик удара в виде оптоэлектронной пары, закрепленной на общей плите блока туловища под деформированным разрезом, выполненным в оболочке туловища в межлопаточной области. Тренажер также обеспечивает возможность оперативного взаимодействия оптоэлектронных пар датчика наложения иммобилизационных шин с собственно иммобилизационными шинами, размещение которых предусмотрено в области конечностей и бедра.
Недостатком этого аналога является сложность конструкции и приобретение навыков, сопряженных с использованием исключительно стационарного оборудования (в частности, анатомического дисплея) поддержки их выработки, что в реальных условиях (где анатомический дисплей отсутствует) существенно снижает четкость и последовательность выполнения реанимации, вплоть до совершения ошибочных действий.
Известен робот-тренажер [2], который имитирует тело человека и содержит имитатор дыхания через рот, имитатор проходимости верхних дыхательных путей, связанный с имитатором легких, имитатор запрокидывания головы, имитатор грудной клетки, шарнирно закрепленный в области шеи и ключицы, а также имитатор пульсации сонной артерии, два имитатора реакции зрачка, датчик надавливания и датчик ускорения. Робот-тренажер снабжен блоком индикации, связанным с упомянутыми датчиками, причем датчик ускорения расположен под имитатором легких, снабженного датчиком объема вдыхаемого воздуха, имитаторы грудной клетки и легких разделены между собой пластиной, которая шарнирно закреплена на одной оси с имитатором грудной клетки, при этом пластина подпружинена относительно имитатора грудной клетки. Все датчики робота-тренажера установлены с возможностью передачи сигнала на электронный блок обработки сигналов. Помимо указанных блоков и элементов, устройство снабжено полупрозрачной оболочкой грудины с изображением ребер, под которыми поместили имитатор кровеносной системы, выполненный из соединенного с источником света оптического волокна с боковым излучением. В известном устройстве имитаторы дыхания через рот и носовых дыхательных путей соединены посредством одной трубки в тройник с имитатором проходимости верхних дыхательных путей, причем между имитатором проходимости верхних дыхательных путей и имитатором легких установлен обратный клапан.
На имитаторе конечности, выполненной в виде руки робота-тренажера, в области запястья размещены элементы блока индикации, причем этот имитатор конечности соединен с муляжом тела человека с возможностью вращения по меньшей мере в плечевом суставе. Датчики усилия нажатия располагают в этом устройстве в области ключиц и мечевидного отростка, а введенный в муляж головы светодиод создает при помощи светотеневой маски имитатор зрачка.
Дренажная система, оснащенная бактерицидным фильтром, взаимодействует с имитатором легких и препятствует возможности возникновения процессов перекрестного переноса инфекции во время эксплуатации робота-тренажера.
Рассматриваемому известному устройству присущи следующие недостатки. Во-первых, у него ограничены функциональные возможности обучения, например, на данном роботе-тренажере не представляется возможным освоить навык по выводу пострадавшего из коматозного состояния, поскольку при перевороте робота-тренажера на живот у него отсутствует проходимость дыхательных путей. Во-вторых, наличие блока индикации на предплечье руки в зоне, доступной для взгляда обучаемого, приводит к выработке у него устойчивой почти рефлекторной попытки отслеживания результата выполнения своих действия, что безусловно можно отнести к вредному навыку. И, наконец, при освоении процедуры искусственной вентиляции легких вследствие недостаточной конструктивной проработки устройства возможна ситуации индикации успешности в отработке этого навыка по параметру подъема имитатора грудной клетки (даже при не зажатых крыльях имитатора носа) сильной по динамике струей воздуха, вдыхаемого обучаемым в ротовое отверстие имитатора рта робота-тренажера. В реальной ситуации (с конкретным пострадавшим) маловероятно поднятие его грудной клетки при осуществлении искусственной вентиляции легких без зажатия крыльев носа, следовательно, навык обязательного блокирования проходимости воздуха через носовые отверстия при проведении искусственной вентиляции легких может не закрепиться у обучаемого, что также является причиной снижения качества обучения.
Наиболее близким по технической сущности и достигаемому результату аналогом является тренажер для отработки навыков первой медицинской помощи [3], который состоит из муляжа тела человека, снабженного анатомическими ориентирами, и каркаса. Муляж тела человека снабжен блоком головы, который образует имитатор ротового и носового дыхательных отверстий, а также имитатор реакции зрачков глаз, блоком шеи, содержащем имитатор пульсации сонной артерии, блоком туловища с клапаном вдоха и имитатором дыхательных движений имитатора грудной клетки, группу датчиков вдоха, нажатия и удара, причем указанные датчики связаны с устройством управления, образованным цифровым вычислительным средством, и блоком отображения информации. Муляж тела человека известного устройства выполнен из эластичной оболочки, имитирующей кожу (в частности, может применяться пластизол) так, что объединяет в одно целое блок головы, блок шеи и блок туловища. При этом в зоне примыкания блока шеи к блоку головы (со стороны спины муляжа тела человека) эластичная оболочка образует складку.
Эластичная оболочка муляжа тела человека жестко скреплена с каркасом известного устройства, образованным двумя независимыми друг от друга частями в виде опорных оснований, содержащих стойки, нижними концами этих стоек, а на верхних концах стоек позиционированы сами опорные основания, помещенные соответственно в затылочной и спинной областях муляжа тела человека.
Имитатор грудной клетки оснащен датчиком нажатия, имитатором мечевидного отростка и имитатором ключиц.
Работу сердца в тренажере воспроизводит имитатор пульсации сонной артерии. Он смонтирован посредством упругой пластины на плите каркаса блока туловища и установлен так, что соприкасается с эластичной оболочкой муляжа тела человека. При этом имитатор пульсации сонной артерии конструктивно исполнен как электромагнит, снабженный пластиной, а его якорь смонтирован с возможностью взаимодействия с указанной пластиной, содержащей в зоне взаимодействия с ним эластичную прокладку. Сам электромагнит при помощи диэлектрического элемента подвешивают на вышеупомянутой пластине на скобе так, что он взаимодействует в зоне расположения сонной артерии с плоской пружиной.
Конструктивной особенностью клапана вдоха, используемого в устройстве-прототипе, является то, что он снабжен нажимным штоком, расположенным со стороны выходного отверстия, при этом нажимной шток жестко связан с подпружиненной запорной пластиной, расположенной в корпусе клапана и установленной с возможностью взаимодействия с его кольцевым седлом, выполненным в корпусе клапана вдоха. Обратный клапан также смонтирован внутри этого же корпуса.
Имитатор дыхательных движений рассматриваемого устройства выполнен в виде герметичного мешка, который помещен на монтажную плиту каркаса блока туловища. С этой монтажной плитой посредством шарнира скреплена одним из своих концов подвижная пластина, соединенная по меньшей мере одной пружиной с имитатором грудной клетки. Имитатор грудной клетки, в одном из вариантов исполнения, представляет собой профилированную пластину, своим собственным шарниром скрепленную с той же монтажной плитой, что и предыдущие узлы. Концы упомянутой пружины жестко скреплены, с одной стороны пружины, с подвижной пластиной герметичного мешка имитатора дыхательных движений, а с другой ее стороны, с профилированной пластиной имитатора грудной клетки. Второй вариант исполнения имитатора дыхательных движений предполагает применение сильфона, один из концов которого закреплен на поверхности монтажной плиты, а второй конец - связан с профилированной пластиной имитатора грудной клетки. Взаимодействие имитатора складки кожи со штоком клапана вдоха обеспечивается за счет поворотного рычага, шарнирно установленного на опорном основании блока туловища в зоне имитатора складки кожи.
Рассматриваемый тренажер принят в качестве устройства-прототипа заявляемого робота-тренажера
Устройство-прототип обладает рядом недостатков, наиболее значимые из которых описаны ниже. Как и в случае предыдущего аналога, у прототипа ограничены функциональные возможности в части обучения. Конкретно, на нем невозможна отработка навыков по выводу пострадавшего человека из состояния комы из-за отсутствия в устройстве аппаратной реализации данного режима обучения. Также не представляется возможным обеспечить обучение правильным навыкам переноса пострадавшего с одного места в другое вследствие отсутствия в прототипе аппаратной реализации контроля положения муляжа тела человека в пространстве.
Из-за того, что конструкция имитатора грудной клетки скреплена с эластичной оболочкой тренажера-прототипа локально (в нескольких точках) и только со спины муляжа тела человека, при эксплуатации тренажера с использованием элемента обучения навыкам в виде надавливания на имитатор грудной клетки может происходить неконтролируемое смещение эластичной оболочки относительно внутреннего каркаса. Поскольку эффект существенного смещения кожного покрова человека в реальных условиях воздействия на него механическим усилием отсутствует, происходящее смещение эластичной оболочки тренажера вызывает у обучаемого по меньшей мере замешательство. Следовательно, качество обучения реанимационным навыкам, которые в составе своих операций в той или иной мере содержат механическое воздействие на имитатор грудной клетки (например, непрямой массаж сердца) снижается. При этом неудачное конструктивное решение узла крепления эластичной оболочки к каркасу в прототипе является причиной сокращения срока ее службы.
Расположение блока индикации на предплечье руки муляжа конечности тела человека тренажера-прототипа в зоне, доступной для оперативного обзора обучающимся, приводит к выработке у него устойчивой склонности к отслеживанию результата выполнения своих действия, которую безусловно можно отнести к исключительно вредному навыку.
В прототипе имитацию пульса обеспечивает электромагнитное реле, которое процесс своего функционирования сопровождает звуковым эффектом в форме дребезжания. Поскольку в реальных условиях реанимации пульс пострадавшего практически беззвучен для находящегося рядом человека, дребезжание электромагнитного реле является побудительной причиной привития обучаемому недопустимого паразитного навыка - навыка контроля наличия пульса в тренажере по распространяющемуся в воздушной среде звуку техногенного происхождения.
В устройстве-прототипе узел, имитирующий ротовое, носовое и глоточное пространство, выполнен как тройник, снабженный соответствующими гибкими трубками. Данное конструктивное решение имеет органично присущий тройнику недостаток, проявляющийся при обучении навыкам проведения искусственной вентиляции легких. Он заключается в том, что в ряду последовательных действий, предшествующих вдоху обучаемого в ротовое отверстие имитатора рта тренажера, может из-за ошибки обучаемого отсутствовать зажатие носовых отверстий имитатора носа, однако подъем имитатора грудной клетки муляжа тела человека тренажера может произойти от мощного потока вдыхаемого воздуха. Следовательно зажатие носовых отверстий имитатора носа, как неотъемлемая составляющая часть навыка стабильного проведения искусственной вентиляции легких, может быть успешно не усвоена обучающимся, что снижает качество подобного рода обучения до недопустимого уровня.
Задача, на решение которой направлена заявленное изобретение, состоит в повышении качества обучения
Техническим результатом, ожидаемым от применения предлагаемого изобретения, является отработка приемов оказания первой медицинской помощи пострадавшим людям в максимально приближенных к реальным условиях.
Технический результат достигается тем, что робот-тренажер, содержащий эластичную оболочку в виде муляжа тела человека, составной каркас, средства фиксации каркаса с эластичной оболочкой, имитаторы глаз, выполненные с возможностью визуализации реакции зрачка, имитатор рта, снабженный линией губ и ротовым отверстием, имитатор носа, снабженный крыльями носа, имитатор грудной клетки, образованный профилированной пластиной, имитатор легких, выполненный в виде эластичного мешка, снабженного входным отверстием, и закрепленный внутри имитатора грудной клетки, имитатор трахеи, выполненный в виде гибкой трубки, один из концов которой соединен с входным отверстием имитатора легких, имитатор пульсации сонной артерии, снабженный электромагнитным исполнительным механизмом, блок индикации, средство управления с блоком питания, обратный клапан, и датчик удара, дополнительно оснащен имитатором ротоносоглотки, имитатором связок, имитатором языка, датчиком зажатия отверстий имитатора носа, датчиком принудительного поступления воздуха в ротовое отверстие имитатора рта, датчиком пространственного положения имитатора языка и средством индикации боли, причем имитатор языка выполнен в виде сферы, имитатор ротоносоглотки выполнен в виде камеры, содержащей входное отверстие, изготовленное в верхней торцевой части камеры и соединенное с имитатором рта через обратный клапан, выходное отверстие, изготовленное в донной торцевой части камеры и соединенное с вторым концом имитатора трахеи, сопло, выполненное в центральной области стенки камеры в форме отверстия, формирователь струи воздуха, выполненный в виде воздуховода, одним из своих концов жестко скрепленной с внутренней поверхностью стенки в области, примыкающей к входному отверстию, а вторым своим концом позиционированный у сопла симметрично его отверстию, клапан сопла, установленный с внешней стороны камеры с возможностью взаимодействия с датчиком зажатия отверстий имитатора носа, при этом в качестве средства фиксации каркаса с эластичной оболочкой применен имитатор связок, выполненный в виде текстильной липучки типа "репейник", закрепленной на обращенных друг к другу поверхностях каркаса и эластичной оболочки, а имитатор легких снабжен выходным отверстием, причем средство индикации боли выполнено в виде датчика давления, установленного внутри одной их конечностей муляжа тела человека, при этом блок индикации размещен на передней стенке имитатора грудной клетки в виде распределенных звуковых и оптических источников информации.
Желательно, чтобы профилированная пластина имитатора грудной клетки в продольном сечении имела подковообразный вид и была снабжена отверстием в зоне наибольшей кривизны.
Целесообразно, чтобы электромагнитный исполнительный механизм имитатора пульсации сонной артерии был выполнен в виде вибрационного электрического двигателя.
Предпочтительно, чтобы имитатор пульсации сонной артерии был помещен в эластичную трубку, которая прикреплена изнутри эластичной оболочки муляжа тела человека в зоне сонной артерии посредством имитатора связок.
Имеет значение, чтобы каркас головы муляжа тела человека был выполнен из профилированных по ее форме пластин, первые концы которых шарнирно связаны между собой в лобно-темянной области головы муляжа тела человека, а вторые концы которых взаимодействовали бы в шейной зоне с распоркой посредством замкового соединения.
Целесообразно, чтобы датчик принудительного поступления воздуха в имитатор рта был выполнен в виде датчика давления и был закреплен вблизи входного отверстия имитатора ротоносоглотки.
Желательно, чтобы имитатор легких закреплялся внутри имитатора грудной клетки посредством имитатора связок.
Предпочтительно, чтобы имитатор ротоносоглотки содержал буртик, размещенный по кромке отверстия сопла со стороны внутреннего объема его камеры.
Имеет значение, чтобы воздуховод был выполнен в виде пластины или патрубка.
Желательно, чтобы площадь проходного сечения патрубка была не меньше площади входного отверстия имитатора ротоносоглотки.
Сопоставительный анализ заявленного изобретения с устройством-прототипом позволил выявить следующие обстоятельства. Предлагаемый объект притязаний отличается от устройства-прототипа наличием новых существенных признаков, характеризующих введение в конструкцию робота-тренажера имитатора ротоносоглотки, имитатора связок, датчика зажатия носовых отверстий, датчика принудительного поступления воздуха в ротовое отверстие имитатора рта, датчик пространственного положения имитатора языка и средство индикации боли, а также иным конструктивным выполнением общих существенных признаков, что позволяет сделать вывод о соответствии предложенного технического решения критерию изобретения "новизна".
Приведенные выше отличительные признаки необходимы и достаточны для достижения заявленного технического результата в единой совокупности со всеми признаками заявленного устройства. Из существующего уровня техники заявителем не было установлено известных технических решений, содержащих признаки, тождественные и/или эквивалентные отличительным признаком предложенного изобретения и обуславливающие раздельно, в частичном или полном составе достижение заявленного технического результата, отражающего решение давно известной проблемы при получении особо хороших результатов. Заявленная конструкция робота-тренажера из уровня техники явным образом не вытекала и не являлась очевидной. В связи с этими доводами представляется возможным сделать вывод о том, что, по мнению заявителя, предложенный им объект промышленной собственности соответствует критерию "изобретательский уровень".
Заявленное изобретение иллюстрируется чертежами:
- на Фиг.1 схематично представлено сечение робота-тренажера в сборе;
- на Фиг.2 схематично изображен фрагмент сечения головы муляжа тела человека тренажера с общим видом функциональных связей размещенного в нем имитатора ротоносоглотки;
- на Фиг.3 схематично изображен фрагмент сечения головы муляжа тела человека в положении, которое моделирует размещение пострадавшего на горизонтальной поверхности лицом вверх, с условным сечением камеры имитатора ротоносоглотки;
- на Фиг.4 схематично изображен фрагмент сечения головы муляжа тела человека в положении, которое моделирует размещение пострадавшего на горизонтальной поверхности лицом вниз, с условным сечением камеры имитатора ротоносоглотки;
- на Фиг.5 схематично изображен фрагмент сечения запрокинутой для проведения искусственной вентиляции легких блока головы муляжа тела человека в состоянии, когда крылья носа имитатора носа не подвергнуты сжатию, в совокупности с изображением условного сечения камеры имитатора ротоносоглотки;
- на Фиг.6 схематично изображен фрагмент сечения запрокинутой для проведения искусственной вентиляции легких головы муляжа тела человека в состоянии, когда крылья носа имитатора носа подвергнуты сжатию, в совокупности с изображением условного сечения камеры имитатора ротоносоглотки;
- на Фиг.7 схематично представлено сечение муляжа тела человека в зоне сочленения муляжа конечности с муляжом туловища, граница которой оснащена средством индикации боли (вид сбоку);
- на Фиг.8 схематично представлен муляж тела человека в зоне сочленения муляжа конечности с муляжом туловища, граница которой оснащена средством индикации боли (вид со спины);
- на Фиг.9 схематично представлен фрагмент функциональной электросхемы заявляемого робота-тренажера.
Перечень позиций.
1. Эластичная оболочка.
2. Голова муляжа тела человека.
3. Туловище муляжа тела человека.
4. Нижняя конечность муляжа тела человека.
5. Каркас головы.
6. Пластина каркаса головы.
7. Распорка каркаса головы.
8. Имитатор связок в виде текстильной липучки.
9. Имитаторы глаз.
10. Линия губ имитатора рта.
11. Ротовое отверстие имитатора рта.
12. Имитатор носа.
13. Крылья носа.
14. Подковообразная пластина имитатора грудной клетки.
15. Отверстие в подковообразной пластине имитатора грудной клетки.
16. Входное отверстие имитатора легких.
17. Эластичный мешок имитатора легких.
18. Выходное отверстие имитатора легких.
19. Рабочий объем имитатора легких.
20. Имитатор трахеи.
21. Имитатор пульсации сонной артерии.
22. Блок индикации.
23. Имитатор ротоносоглотки.
24. Камера имитатора ротоносоглотки.
25. Входное отверстие имитатора ротоносоглотки.
26. Выходное отверстие имитатора ротоносоглотки.
27. Сопло имитатора ротоносоглотки.
28. Буртик сопла имитатора ротоносоглотки.
29. Воздуховод.
30. Имитатор языка.
31. Обратный клапан.
32. Датчик принудительного поступления воздуха в ротовое отверстие;
33. Датчик зажатия носовых отверстий в имитаторе носа;
34. Клапан сопла;
35. Датчик пространственного положения имитатора языка;
36. Узел сочленения туловища и одной из нижних конечностей, содержащий встроенное средство индикации боли;
37. Отверстие в узле сочленения;
38. Датчик давления средства индикации боли;
39. Направление движения воздушного потока.
40. Датчик удара;
41. Датчик поднятия грудной клетки;
42. Датчик нажатия на мечевидный отросток
43. Индикатор нажатия на мечевидный отросток;
44. Кнопка выбора режима работы;
45. Система управления, содержащая блок питания.
Робот-тренажер содержит эластичную оболочку 1 (Фиг.1), которая может быть изготовлена, например, из пластизола, объединяющую в единое целое голову муляжа тела человека 2 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6), туловище муляжа тела человека 3 (Фиг.1, Фиг.7 и Фиг.8) и конечности муляжа тела человека, в том числе нижнюю конечность 4 (Фиг.7 и Фиг.8). В голове муляжа тела человека 2 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6) размещен каркас головы 5 (Фиг.1), состоящий из профилированных по форме головы пластин 6 (Фиг.1), первые концы которых шарнирно (не показано) связаны между собой в лобно-теменной области головы 2 (Фиг.1) муляжа тела человека, а вторые концы которых взаимодействуют в шейной зоне с распоркой каркаса головы 7 (Фиг.1) благодаря замковому соединению (не показан). Каркас головы 5 (Фиг.1) муляжа тела человека плотно прижат с внутренней стороны к поверхности эластичной оболочки 1 (Фиг.1) и может быть скреплен с последней посредством использования средства фиксации каркаса (не показано). В одном и вариантов изготовления каркас головы 5 (Фиг.1) может быть выполнен складным, то есть по типу каркаса зонтика. В этом случае облегчается сборка и настройка упомянутого узла робота-тренажера вне эластичной оболочки 1 (Фиг.1), что помогает поднять как само качество сборки, так и качество настройки (подгонки). В устройстве для фиксации преимущественно эластичной оболочки 1 (Фиг.1) и взаимодействующими с ней элементами каркаса, в том числе каркаса головы 5 (Фиг.1), а также некоторых узлов тренажера между собой, используют имитатор связок 8 (Фиг.1), конструктивно исполненный в виде текстильной липучки типа "репейник". Предложенная конструкция имитатора связок 8 (Фиг.1) позволяет усилить демпфирование внешних механических воздействий на конструкцию робота-тренажера и, помимо существенного повышения надежности крепления, приводит к более равномерному распределению механической нагрузки на поверхности эластичной оболочки, обеспечивая продление этим срок службы робота-тренажера.
В соответствии с общепринятыми требованиями к размещению анатомических ориентиров на муляже тела человека голова 2 (Фиг.1, Фиг.2) муляжа тела человека оснащена имитаторами глаз 9 (Фиг.1, Фиг.2). Кроме этого, голова муляжа тела человека 2 (Фиг.1, Фиг.2) снабжена имитатором рта, содержащего линию губ 10 (Фиг.2) и ротовое отверстие 11 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6), имитатором носа 12 (Фиг.1, Фиг.2), снабженным крыльями носа 13 (Фиг.1, Фиг.2). Указанные элементы головы муляжа тела человека 2 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6) выполнены из того же материала, что и эластичная оболочка 1 (Фиг.1). Имитатор грудной клетки робота-тренажера образован подковообразной пластиной 14 (Фиг.1), расположенной по продольному профилю туловища, при этом в месте наибольшей ее кривизны подковообразная пластина имитатора грудной клетки 14 (Фиг.1) снабжена отверстием 15 (Фиг.1).
Имитатор легких робота-тренажера содержит входное отверстие 16 (Фиг.1) в эластичном мешке 17 (Фиг.1), а также выходное отверстие 18 (Фиг.1), образованное в нем же, обеспечивая в исходном состоянии заполнение атмосферным воздухом рабочего объема 19 (Фиг.1). Это позволяет расширить границы функциональных возможностей предлагаемого робота-тренажера, так как становится аппаратно реализуемой возможность обучения навыкам безвентиляционной сердечно-легочной реанимации, т.е. без принудительного поступления воздуха из легких спасателя в ротовое отверстие имитатора рта 11 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6).
Имитатор легких может быть изготовлен, например, по выкройке из эластичного материала, а также в качестве имитатора легких также может быть использована обычная камера спортивного мяча. В любом из этих случаев конструктивного исполнения имитатор легких закрепляется с внутренней стороны к поверхности подковообразной пластины имитатора грудной клетки 14 (Фиг.1) посредством имитатора связок 8 (Фиг.1). С входным отверстием имитатора легких 16 (Фиг.1) соединен имитатор трахеи 20 (Фиг.1), изготовленный из гибкого материала в форме трубки, пропущенной сквозь отверстие в подковообразной пластине имитатора грудной клетки 15 (Фиг.1).
В области сонной артерии в туловище 3 (Фиг.1) муляжа тела человека размещают имитатор пульсации сонной артерии 21 (Фиг.1), который изготовлен на базе электромагнитного исполнительного механизма, выполненного в виде вибрационного электрического двигателя. Прохождение этапов обучения и приобретение навыков реанимации сопровождается работой блока индикации 22 (Фиг.1), который в виде распределенных звуковых и оптических источников информации размещается на передней стенке имитатора грудной клетки.
В голове муляжа тела человека 2 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.4 и Фиг.6) на каркасе головы 5 (Фиг.1) закрепляют имитатор ротоносоглотки 23 (Фиг.1, Фиг.2), образованный камерой 24 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), которая содержит входное отверстие 25 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), размещенное в ее верхней торцевой части, выходное отверстие 26 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), выполненное в ее донной торцевой части, и сопло 27 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), изготовленное в центральной области ее стенки в форме отверстия. Сопло имитатора ротоносоглотки 27 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) содержит буртик 28 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), выполненный по кромке его отверстия со стороны внутреннего объема камеры 24 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6). В камере имитатора ротоносоглотки 24 (Фиг.3, Фиг.4, Фиг.4 и Фиг.6) позиционирован воздуховод 29 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), обеспечивающий стабилизацию движения потоков принудительно вдыхаемого в камеру 24 (Фиг.3, Фиг.4, Фиг.4 и Фиг.6) воздуха. Воздуховод 29 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) может быть выполнен как в виде пластины, так и в виде патрубка, в последнем случае площадь проходного сечения патрубка должна быть не меньше площади входного отверстия 25 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) имитатора ротоносоглотки. Камера имитатора ротоносоглотки 24 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) снабжена помещенным в нее имитатором языка 30 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6), выполненного в виде сферы. В ротовом отверстии имитатора рта 11 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.5 и Фиг.6) установлен обратный клапан 31 (Фиг.2), сопряженный с входным отверстием имитатора ротоносоглотки 25 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6). Помимо него имитатор ротоносоглотки снабжен датчиком принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2), а имитатор носа 12 (Фиг.1, Фиг.2) содержит в своем составе датчик зажатия носовых отверстий 33 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6). С внешней стороны сопла 27 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) установлен клапан сопла 34 (Фиг.2, Фиг.3, Фиг.4, Фиг.5 и Фиг.6), взаимодействующий по цепи управления (не показана) с датчиком зажатия носовых отверстий 33 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6).
Позиционирование имитатора языка 30 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6) в зависимости от пространственного положения головы муляжа тела человека 2 (Фиг.1, Фиг.2, Фиг.3, Фиг.4, Фиг.5 и Фиг.6) подвергается контролю посредством датчика пространственного положения имитатора языка 35 (Фиг.3, Фиг.4, Фиг.5 и Фиг.6). Узел сочленения 36 (Фиг.7, Фиг.8) туловища 3 (Фиг.7, Фиг.8) и одной из нижних конечностей 4 (Фиг.7 и Фиг.8) муляжа тела человека содержит встроенное средство индикации боли. Переход между туловищем и конечностью в узле сочленения 36 (Фиг.7 и Фиг.8) может быть выполнен, например, в виде упругой диафрагмы, которая содержит сквозное отверстие 37 (Фиг.7 и Фиг.8) способствующее правильной работе датчика давления средства индикации боли 38 (Фиг.7 и Фиг.8) вследствие газообмена с атмосферой. Для обеспечения отработки навыков прекардиального удара, заявленный робот-тренажер оснащен датчиком удара 40 (Фиг.1), который размещается под подковообразной пластиной имитатора грудной клетки 14 (Фиг.1) в имитаторе связок 8 (Фиг.1) над эластичным мешком имитатора легких 17 (Фиг.1). С противоположной стороны имитатора легких между ним и противолежащей областью подковообразной пластины имитатора грудной клетки 14 (Фиг.1), также в имитаторе связок 8 (Фиг.1) позиционирован датчик поднятия грудной клетки 41 (Фиг.1). В рассматриваемом роботе-тренажере предусмотрен контроль воздействия на мечевидный отросток, который осуществляется за счет использования датчика нажатия на мечевидный отросток 42 (Фиг.1), связанного цепью управления, например гальванической, с индикатором нажатия на мечевидный отросток 43 (Фиг.1).
Робот-тренажер также обеспечен кнопкой выбора режима работы 44 (Фиг.9), оперативно взаимодействующей с системой управления 45 (Фиг.9), которая может быть изготовлена на базе типовых вычислительных средств, например компьютера с цифровым процессором, оснащенного блоком бесперебойного питания (не показан) и необходимыми интерфейсами.
Использование предлагаемого робота-тренажера позволяет освоить следующие приемы правильного взаимодействия с пострадавшим в рамках оказания ему первой медицинской помощи и успешно закрепить изученные навыки:
- вывод пострадавшего из коматозного состояния;
- выполнение прекардиального удара (механической дефибрилляции);
- проведение сердечно-легочной реанимации, включающей в свой состав искусственную вентиляцию легких и непрямой массаж сердца;
- проведение безвентиляционной (ручной) сердечно-легочной реанимации;
- бережного и аккуратного обращения, исключающего причинение пострадавшему боли при перевязке или транспортировке.
Использование заявляемого робота-тренажера может происходить в нескольких независимых режимах, а его функционирование при выборе конкретного режима применения протекает следующим образом.
ПРИМЕР 1.
Робот-тренажер используют в режиме "ОБУЧЕНИЕ". Вначале включают электрическое питание блока управления 45 (Фиг.9). При включении система управления 45 (Фиг.9) входит в состояние автоматического самотестирования. Происходит проверка работоспособности всех датчиков, индикаторов и исполнительных устройств. В исходном состоянии указанные элементы находятся в выключенном состоянии. При положительном результате завершения процесса самотестирования робот-тренажер готов к использованию. Выбор режима осуществляют кнопкой выбора режима работы 44 (Фиг.9). Режимы работы переключаются последовательно (в частности, - обучение > экзамен > кома > боль...) при удержании в замкнутом состоянии кнопки выбора режима работы 44 (Фиг.9) в течение, например, 5 секунд.
Режим "ОБУЧЕНИЕ" характеризуется исходным состоянием, при котором не включена подсветка радужной оболочки имитатора глаз 9 (Фиг.1 и Фиг.2) и не включен имитатор пульсации сонной артерии 21 (Фиг.1). В режиме "ОБУЧЕНИЕ" обучающийся приобретает навыки проведения прекардиального удара и сердечно-легочной реанимации.
Перед тем, как приступить к реанимационным действиям в режиме "ОБУЧЕНИЕ", обучающийся должен произвести оценку состояния "пострадавшего", то есть проверить на роботе-тренажере наличие пульсации (нащупывая зону размещения сонной артерии у муляжа тела человека) и наличие подсветки радужной оболочки имитаторов глаз 9 (Фиг.1). Отсутствие указанных выше признаков указывает на необходимость приступить к выполнению реанимационных действий. Реанимационные действия, по усмотрению обучающегося, могут начаться как с нанесением прекардиального удара, так и с проведения сердечно-легочной реанимации.
В реальных условиях проведения цикла реанимационных действий, перед нанесением прекардиального удара по грудине человека, обучающийся должен прикрыть двумя пальцами его мечевидный отросток, так как при ударе этот отросток может отломиться от грудной кости и повредить печень. Поэтому удар кулаком по грудине наносится на 4-5 см выше пальцев, прикрывающих мечевидный отросток.
При освоении приема нанесения прекардиального удара на роботе-тренажере обучающийся подобным образом обязан прикрыть двумя пальцами одной руки место расположения мечевидного отростка на муляже тела человека робота-тренажера, а затем кулаком другой руки нанести удар через эластичную оболочку 1 (Фиг.1) по подковообразной пластине имитатора грудной клетки 14 (Фиг.1). Импульс ударной волны воздействует на датчик удара 40 (Фиг.1). Если прекардиальный удар выполнен обучающимся правильно, то датчик удара 40 (Фиг.1) посылает системе управления 45 (Фиг.9) соответствующий информационный сигнал, что прекардиальный удар выполнен обучающимся успешно. После обработки этого сигнала система управления 45 (Фиг.9) выдает команду на "оживление" робота-тренажера, что находит свое выражение в запуске его "сердечной" деятельности, то есть включению на 60 секунд имитатора пульсации сонной артерии 21 (Фиг.1) и коммутации электроцепи подсветки имитаторов глаз 9 (Фиг.1 и Фиг.2). Подсветка зрачков имитаторов глаз 9 (Фиг.1) робота-тренажера имитирует суженные зрачки, как и у реального пострадавшего. Сужение зрачков свидетельствует о том, что реальный пострадавший находится в сознании. По аналогии с этим, в итоге успешного осуществления прекардиального удара обучаемый должен наблюдать свечение радужной оболочки имитатора глаз 9 (Фиг.1) робота-тренажера, а в области расположения сонной артерии почувствовать пульсацию с частотой 1 Гц (60 раз/мин).
Через заранее заданный промежуток времени, (например, 60 секунд), система управления 45 (Фиг.9) выключает имитатор пульсации сонной артерии 21 (Фиг.1) и подсветку имитаторов глаз 9 (Фиг.1), оставаясь в режиме "ОБУЧЕНИЕ".
Необходимо отметить, что выполнение имитатора пульсации сонной артерии 21 (Фиг.1) на основе вибрационного микродвигателя для пейджеров (или мобильных телефонов) и соединение его с эластичной оболочкой 1 (Фиг.1), например, через эластичную трубку посредством имитатора связок 8 (Фиг.1), позволяет устранить звуковой эффект в форме дребезжания, присущий прототипу, и добиться максимального сходства пульсации в сонной артерии с пульсом реального человека.
С целью обучения навыкам правильного выполнения прекардиального удара на подковообразной пластине имитатора грудной клетки 14 (Фиг.1) в зоне расположения мечевидного отростка установлен датчик нажатия на мечевидный отросток 42 (Фиг.1), соединенный с индикатором нажатия на мечевидный отросток 43 (Фиг.1).
В том случае, если обучающийся не выполнил изложенных выше рекомендаций по технике выполнения прекардиального удара, то он своим кулаком может угадить в зону мечевидного отростка имитатора тела человека робота-тренажера. Тогда датчик нажатия на мечевидный отросток 42 (Фиг.1) сообщит системе управления 45 (Фиг.9) о допущенной обучающимся ошибке. После обработки этого сигнала система управления 45 (Фиг.9) блокирует все программы по реанимационным действиям и все датчики, кроме кнопки выбора режима работы 44 (Фиг.9), а затем выдает команду на запуск звуковой и светового сигнализации, осуществляемой посредством блока индикации 22 (Фиг.1), включая подсветку области мечевидного отростка индикатором нажатия на мечевидный отросток 43 (Фиг.1), оповещая таким образом о неумелых действиях обучающегося. Допущенная обучающимся ошибка считается фатальной, в результате ее робот-тренажер "умер". Целесообразно организовать работу блока индикации 22 (Фиг.1) так, что световая и звуковая сигнализация не прерываются до момента кратковременного (например, длительностью около 1 секунды) нажатия на кнопку выбора режима работы 44 (Фиг.9), что является информированием системы управления 45 (Фиг.9) о том, что допущенная обучающимся ошибка зафиксирована и осознана. После совершения этого действия обучающимся, по существу обеспечивающего обратную информационную связь с системой управления 45 (Фиг.9), робот-тренажер опять возвращается в режим "ОБУЧЕНИЕ" и ожидает начала проведения обучающимся нового цикла реанимационных действий.
Согласно принятому положению, если после первого прекардиального удара по грудине человека пульс у пострадавшего не появится, то оказывающий первую медицинскую помощь должен приступить к проведению цикла сердечно-легочное реанимации или в полном объеме, включающем искусственную вентиляцию легких способом "изо рта в рот" и сопутствующий этому непрямой массаж сердца, или сердечно-легочную реанимацию с использованием только непрямого массажа сердца (так называемая "безвентиляционная" - ручная реанимация). Сердечно-легочная реанимация при ее выполнении в полном объеме состоит из исполняемых поочередно нескольких циклов искусственной вентиляции легких и непрямого массажа сердца. Каждый цикл непрямого массажа сердца и искусственной вентиляции легких соответствует от 5 до 15 нажатиям на грудную клетку и 1-2 раз принудительной подачи воздуха в легкие пострадавшего. Сердечно-легочная реанимация может начинаться как с искусственной вентиляции легких, так и с непрямого массажа сердца.
В режиме "ОБУЧЕНИЕ" приобретение навыков сердечно-легочной реанимации производится следующим образом: одной рукой обучаемый обхватывает подбородок головы муляжа тела человека 2 (Фиг.1) робота-тренажера, а другой своей рукой зажимает имитатор носа 12 (Фиг.1, Фиг.2). Сжатие крыльев носа 13 (Фиг.1, Фиг.2) робота-тренажера имитирует зажатие носовых отверстий, поскольку срабатывает датчик зажатия носовых отверстий 33 (Фиг.3), обеспечивая при этом перекрытие сопла имитатора ротоносоглотки 27 (Фиг.6) якорем клапана сопла 34 (Фиг.6). Далее обучающийся должен запрокинуть голову муляжа тела человека 2 (Фиг.6) робота-тренажера. При запрокидывании головы муляжа тела человека 2 (Фиг.6) на угол не менее 15°, клапан имитатора языка 30 (Фиг.6) по действием сил гравитации сходит со своего седла, образованного выходным отверстием имитатора ротоносоглотки 26 (Фиг.6), включая в работу датчик пространственного положения имитатора языка 35 (Фиг.2), и открывает при этом выходное отверстие имитатора ротоносоглотки 26 (Фиг.6). Затем обучающийся должен сделать глубокий вдох (набрав максимально возможное количество воздуха в свои легкие), наклониться и, плотно прижав свои губы к линии губ имитатора рта 10 (Фиг.2) робота-тренажера, сделать выдох воздуха из своих легких в ротовое отверстие имитатора рта 11 (Фиг.6). В результате движения потока воздуха срабатывает датчик принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2), а поток воздуха будет перемещаться по направлению 39 (Фиг.6) через входное отверстие имитатора ротоносоглотки 25 (Фиг.6), камеру имитатора ротоносоглотки 24 (Фиг.6), огибая воздуховод 29 (Фиг.6), через выходное отверстие имитатора ротоносоглотки 26 (Фиг.6), по имитатору трахеи 20 (Фиг.1), а затем через входное отверстие имитатора легких 16 (Фиг.1) устремится в рабочий объем имитатора легких 19 (Фиг.1). Если обучающийся произвел выдох в ротовое отверстие имитатора рта 11 (Фиг.6) с достаточно мощным усилием, то поток дает в нем избыточное давление, поскольку несмотря на наличие выходного отверстия имитатора легких 18 (Фиг.1), воздух задерживается и накапливается в указанном рабочем объеме из-за того, что входное отверстие имитатора легких 16 (Фиг.1) больше по проходному сечению, чем аналогичный размер выходного отверстия имитатора легких 18 (фиг.1). В результате накопления воздуха в рабочем объеме имитатора легких 19 (Фиг.1) в нем происходит увеличение давления и эластичный мешок имитатора легких 17 (Фиг.1) раздвигает края подковообразной пластины имитатора грудной клетки 14 (Фиг.1), то есть происходит имитация подъема грудной клетки в туловище муляжа тела человека 3 (Фиг.1). При этом эластичный мешок имитатора легких 17 (Фиг.1) вследствие избыточного давления в рабочем объеме имитатора легких 19 (Фиг.1) оказывает прямое механическое воздействие на датчик поднятия грудной клетки 41 (Фиг.1), тем самым формируя сигнал об этом событии. В результате произведенного реанимационного действия в систему управления 45 (Фиг.9) почти одновременно поступают четыре сигнала от датчиков 32, 33, 35, и 41 (Фиг.1), что свидетельствует о правильно выполненном обучающемся цикле искусственной вентиляции легких. Обобщив и обработав поступившую от вышеупомянутых датчиков информацию, система управления 45 (Фиг.9) посредством работы блока индикации 22 (Фиг.1) оповещает о достигнутом в процессе обучения положительном результате включением светового индикатора, например зеленого спектра. После получения обучающимся результата реанимационного действия в виде поднятия грудной клетки, он приступает к выполнению цикла непрямого массажа сердца. В силу неординарного конструктивного выполнения имитатора ротоносоглотки 23 (Фиг.1) представляется необходимым пояснить некоторые особенности его конструкции. Они состоят в том, что имитатор ротоносоглотки 23 (Фиг.1) содержит имитатор языка 30 (Фиг.3-Фиг.6), выполненный в виде сферы, а также воздуховод 29 (Фиг.3-Фиг.6), помещенные в камере имитатора ротоносоглотки 24 (Фиг.3-Фиг.6), причем воздуховод 29 (фиг.3-Фиг.6) и сопло 27 (Фиг.3-Фиг.6) не позволяют потоку воздуха, принудительно поступившему из легких обучающегося, проникнуть в имитатор трахеи 20 (Фиг.5) даже в случае запрокинутой головы муляжа тела человека 2 (Фиг.5), т.е. при незаблокированном имитатором языка 30 (Фиг.5) выходе в имитатор трахеи 20 (Фиг.1), но не зажатых крыльях носа 13 (Фиг.2). Это обеспечивается благодаря тому, что фиксируемая датчиком принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2) струя воздуха, с усилием поступающая в камеру имитатора ротоносоглотки 24 (Фиг.5), всегда в этом случае направляется воздуховодом 29 (Фиг.5) в сопло имитатора ротоносоглотки 27 (Фиг.5) и через его отверстие выводится наружу из упомянутой камеры. При этом в пространстве между воздуховодом 29 (Фиг.5) и имитатором языка 30 (Фиг.5) создается динамическое разрежение воздуха и поток воздуха от выходного отверстия имитатора ротоносоглотки 26 (Фиг.5) движется в направлении 39 (Фиг.5).
Направление движения воздушного потока 39 (Фиг.6) существенно изменяется, если при откинутой более чем на 15° голове муляжа тела человека 2 (Фиг.6) робота-тренажера, обучающийся пальцами своей рукой зажимает крылья носа 13 (Фиг.6) имитатора носа 12 (Фиг.2). Происходит срабатывание датчика зажатия носовых отверстий в имитаторе носа 33 (Фиг.6), обеспечивая тем самым перекрытие клапаном сопла 34 (Фиг.6) отверстия сопла имитатора ротоносоглотки 27 (Фиг.6). По этой причине выход потока воздуха из сопла имитатора ротоносоглотки 27 (Фиг.6) прекращается, а принудительно подаваемый в камеру 24 (Фиг.6) поток воздуха из легких обучающегося разворачивается внутри камеры имитатора ротоносоглотки 24 (Фиг.6) и устремляется к выходному отверстию имитатора ротоносоглотки 26 (Фиг.6), впоследствии приводя к наполнению через имитатор трахеи 20 (Фиг.1) рабочего объема имитатора легких 19 (Фиг.1), побуждая тем самым робот-тренажер имитировать подъем грудной клетки.
Необходимо отметить, что поток воздуха, выходящий из сопла имитатора ротоносоглотки 27 (Фиг.5), можно вывести за пределы камеры внутреннего объема эластичной оболочки 1 (Фиг.1) робота-тренажера при помощи дополнительной трубки, соединяемой с соплом имитатора ротоносоглотки 27 (Фиг.3-Фиг.6) во время его незаблокированного клапаном сопла 34 (Фиг.3-Фиг.6) состояния. Введение дополнительной трубки (не показана) позволит устранить появление конденсата внутри эластичной оболочки 1 (Фиг.1), и, как следствие, предотвратить развитие колоний бактерий внутри нее.
В ходе выполнения обучающимся на роботе-тренажере приемов искусственной вентиляции легких могут возникнуть следующие ситуации, квалифицируемые как типовые ошибки реанимационных действий:
1 - Не зажаты крылья носа 13 (Фиг.2) и не запрокинута на положенный угол голова муляжа тела человека 2 (Фиг.3), но обучающимся выполнен сильный принудительный вдох потока воздуха в ротовое отверстие имитатора рта 11 (Фиг.3).
2 - Не зажаты крылья носа 13 (Фиг.2), но запрокинута на положенный угол голова муляжа тела человека 2 (Фиг.5) и обучающимся выполнен сильный принудительный вдох потока воздуха в ротовое отверстие имитатора рта 11 (Фиг.5).
3 - Зажаты крылья носа 13 (Фиг.2), но не запрокинута на положенный угол голова муляжа тела человека 2 (Фиг.1) и обучающимся выполнен сильный принудительный вдох потока воздуха в ротовое отверстие имитатора рта 11 (Фиг.2).
4 - Зажаты крылья носа 13 (Фиг.2), запрокинута на положенный угол голова муляжа тела человека 2 (Фиг.6), но обучающимся выполнен слабый принудительный вдох потока воздуха в ротовое отверстие имитатора рта 11 (Фиг.6).
При любой из этих ошибок выполнения искусственной вентиляции легких система управления 45 (Фиг.9) собрана с возможностью оповещения об отрицательном исходе выполненного цикла реанимационных действий коротким звуковым сигналом, например, длительностью около 0,5 секунды, или комбинацией подобного рода сигналов. Так предоставляется возможность зафиксировать внимание обучающегося на допущенных им ошибках и открывается путь к устранению неверных навыков при повторных циклах реанимационных действий. По существу организуется звуковое кодирование допущенных ошибок. Так например, если обучающийся выполняет первые три цикла искусственной вентиляции легких безошибочно, но делает слабый выдох воздуха из своих легких в ротовое отверстие имитатора рта 11 (Фиг.2) робота-тренажера, то динамический поток воздуха, попадая в рабочий объем имитатора легких 19 (Фиг.1) не создает в нем избыточного давления, необходимого и достаточного для обеспечения срабатывания датчика поднятия грудной клетки 41 (Фиг.1), поскольку принудительно поступив туда под слабым напором, тут же стравливается с темпом, адекватным темпу поступления наружу через выходное отверстие имитатора легких 18 (Фиг.1). После прекращения принудительного вдоха в ротовое отверстие имитатора рта 11 (Фиг.1) датчик принудительного поступления воздуха 32 (Фиг.2) выключается, отослав соответствующий сигнал системе управления 45 (Фиг.9). Система управления 45 (Фиг.9), проанализировав сигналы, полученные от датчиков, выдает, например, команду блоку индикации 22 (Фиг.1) на воспроизведение четырех коротких звуковых сигнала, оповещая таким способом обучающегося о выполненном им слабом выдохе. Определившись с процедурой выполнения реанимационных действий и установив, что допускается, например, только два безуспешных (недостаточно сильных) для срабатывания датчика поднятия грудной клетки 41 (Фиг.1) вдоха обучающегося в ротовое отверстия имитатора рта 11 (Фиг.1), после второй неудачной попытки искусственной вентиляции легких, так же, как и в случае успешно проведенной искусственной вентиляции легких, обучаемый должен перейти к непрямому массажу сердца, т.е. сделать от 5 до 15 надавливаний на область грудины муляжа тела человека робота-тренажера с амплитудой прогиба подковообразной пластины имитатора грудной клетки 14 (Фиг.1) от 3 до 5 см.
В рамках процедуры выполнения непрямого массажа сердца обучающийся начинает ритмично надавливать на область грудины муляжа тела человека, транслируя создаваемое им механическое давление на подковообразную пластину имитатора грудной клетки 14 (Фиг.1), а через нее - на эластичный мешок имитатора легких 17 (Фиг.1), буквально выдавливая из рабочего объема 19 (Фиг.1) находящийся там воздух, одна часть которого стравливается через выходное отверстие имитатора легких 18 (Фиг.1) наружу, а вторая часть этого воздуха, проходя имитатор трахеи 20 (Фиг.1) и имитатор ротоносоглотки 23 (Фиг.1, Фиг.1), выводится через сопло имитатора ротоносоглотки 27 (Фиг.1, Фиг.2) под эластичную оболочку 1 (Фиг.1). Однако перед этим вторая часть воздуха, входя под избыточным давлением в контакт с частью поверхности имитатора языка 30 (Фиг.3) через выходное отверстие имитатора легких 18 (Фиг.3), сталкивает со своего седла сферический имитатор языка 30 (Фиг.3), что регистрируется посредством датчика пространственного положения имитатора языка 35 (Фиг.2). Кроме работы упомянутого датчика движение потока воздуха в ротовом отверстии имитатора рта 11 (Фиг.3) дополнительно фиксируется датчиком принудительного поступления воздуха в 32 (Фиг.2).
Таким образом, при каждом нажатии на грудину муляжа тела человека происходит смещение имитатора языка 30 (Фиг.3), выполняющего функции клапана, управляемого силами гравитации, со своего седла, образованного кромкой выходного отверстия имитатора ротоносоглотки 26 (Фиг.3-Фиг.6), с высокой степенью приближения к реальности воспроизводя процесс освобождения у пострадавшего человека глоточного пространства от "провалившегося" в него языка. Соответственно этому в реальных условиях реанимационных действий полностью обеспечивается прохождение потока воздуха из легких по верхним дыхательным путям в носовые отверстия. В предлагаемом роботе-тренажере в качестве носовых отверстий выступает сопло имитатора ротоносоглотки 27 (Фиг.3-Фиг.6). Воздух, выдавленный из рабочего объема имитатора легких 19 (Фиг.1), не может выходить через ротовое отверстие 11 (Фиг.2), потому что в нем установлен обратный клапан 31 (Фиг.2). А чтобы имитатор языка 30 (Фиг.3) сместился со своего седла, в качестве которого выступает кромка выходного отверстия имитатора ротоносоглотки 26 (Фиг.3), необходимо быстро и с усилием не менее 15 кг нажать на подковообразную пластину имитатора грудной клетки 14 (Фиг.1). В этом случае каждое верно приложенное усилие фиксируется тремя датчиками, а именно: датчиком поднятия грудной клетки 41 (Фиг.1), датчиком пространственного положения имитатора языка 35 (Фиг.2) и датчиком принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2). Сигналы с этих датчиков поступают в систему управления 45 (Фиг.9), которая анализирует правильность производимого реанимационного действия. Нажатия на грудину муляжа тела человека робота-тренажера с усилием менее 15 кг датчиком принудительного поступления воздуха 32 (Фиг.2) и датчиком пространственного положения имитатора языка 35 (Фиг.2) не фиксируются, так как в этом случае не происходит смещения имитатора языка 30 (Фиг.3) с внутренней кромки выходного отверстия имитатора ротоносоглотки 26 (Фиг.3) и воздух в его камеру 24 (Фиг.3) не может поступить, а стравливается в атмосферу через выходное отверстие имитатора легких 18 (Фиг.1).
Правильность выполнения обучающимся непрямого массажа сердца оценивается не только по почти одновременному срабатыванию датчика поднятия грудной клетки 41 (фиг.1), датчика пространственного положения имитатора языка 35 (Фиг.1) и датчика принудительного поступления воздуха в ротовое отверстие 32 (Фиг.1), но и по частоте их срабатывания, т.е. по временному интервалу между нажатиями. Программно в заявляемом роботе-тренажере этот временной интервал задан промежутком от 0,7 до 1,5 секунд.
Более частый (быстрый) темп нажатия в реальных условиях приводит к перелому ребер у реанимируемого, подвергающегося оказания первой медицинской помощи. Поэтому в режиме "ОБУЧЕНИЕ" при обнаружении первого временного интервала между нажатиями менее 0,7 секунды система управления 45 (Фиг.9) зафиксирует перелом ребра, после чего блокирует все программы выполнения реанимационных действий и все датчики, кроме кнопки выбора режима работы 44 (Фиг.9), а затем выдает команду на включение звуковой сигнализации и одного из световых индикаторов блока индикации 22 (Фиг.1), например, красного спектра, для подсвечивания области "сломанного" ребра на муляже тела человека робота-тренажера, оповещая о допущенной ошибке. При этом световая и звуковая сигнализация не прерываются до момента кратковременного (примерно 1 секунда) нажатия на кнопку выбора режима работы 44 (Фиг.9), в результате чего система управления 45 (Фиг.9) возвращается в состояние режима "ОБУЧЕНИЕ" и снова ожидает возобновление действий обучающегося.
В случае если нажатия на грудину муляжа тела человека обучающимся выполнены правильно как по величине прилагаемых усилий, так и по частоте выполнения, то система управления 45 (Фиг.9) включает посредством блока индикации 22 (Фиг.1) один из световых индикаторов, например, синего спектра, расположенный в области ключиц на муляже тела человека, информируя так об успехе.
Первый успешно выполненный цикл искусственной вентиляции легких плюс непрямого массажа сердца (или цикл непрямого массажа сердца плюс искусственной вентиляции легких) система управления 45 (Фиг.9) отмечает подсветкой зрачков имитаторов глаз 9 (фиг.1). Подсветка зрачков имитаторов глаз 9 (Фиг.1) робота-тренажера создает эффект суженных зрачков, присущих реальному пострадавшему, который пришел в сознание. Подсветка зрачков имитаторов глаз 9 (Фиг.1) робота-тренажера свидетельствует о том, что робот-тренажер условно говоря "находится в сознании". И теперь следующей задачей обучающегося является восстановление сердечной деятельности.
Проведение сердечно-легочной реанимации постоянно сопряжено с контролем ее результатов со стороны системы управления 45 (Фиг.9), при этом любая из вышеуказанных ошибок при выполнении цикла искусственной вентиляции легких или непрямого массажа сердца четко регистрируется системой управления 45 (Фиг.9), в результате чего она выключает подсветку зрачков имитаторов глаз 9 (Фиг.1). Последнее обстоятельство приводит к увеличению времени, которое обучающийся тратит на "оживление" заявленного робота-тренажера. Очередной успешно выполненный цикл искусственной вентиляции легких плюс непрямого массажа сердца (или цикл непрямого массажа сердца плюс искусственная вентиляция легких) снова сопровождается возобновлением подсветки зрачков имитаторов глаз 9 (фиг.1), то есть робот-тренажер опять "находится в сознании".
Система управления 45 (фиг.1) после 8-10 подряд успешно выполненных реанимационных циклов искусственной вентиляции легких плюс непрямой массаж сердца (или наоборот) "оживляет" робота-тренажера, что проявляется в восстанавливает его "сердечной" деятельности, характеризующейся тем, что подсветка зрачков имитаторов глаз 9 (фиг.1) дополняется включением имитатора пульсации сонной артерии 21 (Фиг.1) примерно на 60 секунд. В момент указанного "оживления" робота-тренажера система управления 45 (Фиг.9) фиксирует время, затраченное обучающимся на получение этого положительного результата. Примерно через 60 секунд система управления 45 (Фиг.1) выключает имитатор пульсации сонной артерии 21 (Фиг.1) и обесточивает подсветку имитаторов глаз 9 (Фиг.1), оставаясь в режиме "ОБУЧЕНИЕ".
В реальных условиях проведения реанимационных действий при каждом надавливании на грудную клетку пострадавшего его сердце сжимается между грудной костью и позвоночником, благодаря чему кровь из сердца выбрасывается в сосуды и продвигается по организму. После прекращения надавливания грудина реального человека возвращается в исходное положение, а кровь затекает из сосудов в сердце. Следовательно, каждое надавливание на грудную клетку человека заменяет одно сокращение его сердца.
Проведение непрямого массажа сердца пострадавшему помимо возобновления кровотока приводит к вытеснению из его легких до 300-500 мл воздуха, удаляемого в атмосферу через носовые и ротовое отверстия. Когда на грудину пострадавшего не оказывается давление, грудина возвращается в исходное положение, создавая благодаря этому разреженное состояние воздуха в легких пострадавшего. В результате атмосферный воздух засасывается через верхние дыхательные пути в легкие пострадавшего, осуществляя их вентиляцию. На использовании рассмотренного механизма принудительной вентиляции легких и стимуляции кровотока основан способ ручной искусственной вентиляции легких.
Для восстановления сердечного ритма посредством безвентиляционного варианта сердечно-легочной реанимации требуется без перерыва в течение 3-6 минут производить нажатия на грудину пострадавшего, обеспечивая ее прогиб по направлению к позвоночнику на 3-5 сантиметров.
Важность приобретения навыка реанимационных действий таким способом очень актуальна, особенно когда выделения изо рта пострадавшего представляют угрозу для здоровья самого спасателя. К тому же среди потенциальных спасателей имеется большой процент брезгливых людей, и они психологически не способны осуществить искусственную вентиляцию легких пострадавшему по типу "изо рта в рот" или "изо рта в нос". Поэтому обучение навыку безвентиляционной (ручной) сердечно-легочной реанимации позволит сохранить жизнь многим пострадавшим. Возможность обучения и приобретения указанного навыка безвентиляционной сердечно-легочной реанимации предусмотрена и в заявленной конструкции робота-тренажера.
Для приобретения навыка проведения безвентиляционной (ручной) сердечно-легочной реанимации в соответствии с изобретением обучающийся должен начать выполнение реанимационных действий с непрямого массажа сердца. Нажатия на грудину муляжа тела человека робота-тренажера обучающийся проводит первые 3-6 минут по описанной выше методике под непрерывным контролем системы управления 45 (Фиг.9).
В рамках приобретения навыка осуществления безвентиляционной сердечно-легочной реанимации обучающийся оказывает давление на грудину муляжа тела человека (фактически через эластичную оболочку 1 (Фиг.1) на подковообразную пластину грудной клетки 14 (Фиг.1)) и через нее транслирует усилие на эластичный мешок имитатора легких 17 (Фиг.1), деформируя его и выдавливая из рабочего объема имитатора легких 19 (Фиг.1) находящийся там воздух, первая часть которого стравливается через выходное отверстие 18 (Фиг.1) в атмосферу, а вторая часть которого поступает через имитатор трахеи 20 (Фиг.1) в выходное отверстие имитатора ротоносоглотки 26 (Фиг.3) и сталкивает вследствие разницы давлений с внутренней кромки своего отверстия имитатор языка 30 (Фиг.3), выходя затем наружу через сопло имитатора ротоносоглотки 27 (Фиг.3).
Как только обучающийся прекращает давить на грудину муляжа тела человека робота-тренажера, имитатор языка 30 (Фиг.3) под действием гравитации словно клапан перекрывает выходное отверстие имитатора ротоносоглотки 26 (Фиг.3), позиционируясь на его кромке словно на седле. Подковообразная пластина имитатора грудной клетки 14 (Фиг.1) за счет своих пружинных свойств возвращается в исходное положение, обеспечивая засасывание атмосферного воздуха в восстановивший свою исходную форму эластичный мешок имитатора легких 17 (Фиг.1) через выходное отверстие 18 (Фиг.1). Площадь сечения выходного отверстия имитатора легких 18 (Фиг.1) выбирают в 3-5 раз меньше, чем площадь проходного сечения сопла имитатора ротоносоглотки 27 (Фиг.2). Это позволяет воздуху быстро выходить из рабочего объема имитатора легких 19 (Фиг.1) и достаточно медленно засасываться из атмосферы через выходное отверстие имитатора легких 18 (Фиг.1), точно подражая процессу принудительной вентиляции легких у пострадавшего человека, происходящему с пострадавшим в реальных условиях.
После, примерно, 200-300 подряд успешно выполненных обучающимся нажатий на грудину муляжа тела человека система управления 45 (Фиг.9) производит "оживление" робота-тренажера, то есть включает примерно на 60 секунд имитатор пульсации сонной артерии 21 (Фиг.1) и коммутирует электропитание подсветки имитаторов глаз 9 (Фиг.1). После прохождения указанного времени система управления 45 (Фиг.9) производит выключение имитатора пульсации сонной артерии 21 (Фиг.1) и разрывает цепь электропитания подсветки имитаторов глаз 9 (Фиг.1), оставаясь в режиме "ОБУЧЕНИЕ".
ПРИМЕР 2.
Заявленный робот-тренажер используют в режиме "ЭКЗАМЕН". Вначале включают электрическое питания блока управления 45 (Фиг.9). При этом включении система управления 45 (Фиг.9) входит в состояние автоматического самотестирования. Происходит проверка работоспособности всех датчиков, индикаторов и исполнительных устройств. В случае положительного результата завершения процесса самотестирования робот-тренажер готов к применению. Исходное состояние режима "ЭКЗАМЕН" характеризуется тем, что не включена подсветка радужных оболочек имитаторов глаз 9 (Фиг.1) (у пострадавшего человека в бессознательном состоянии зрачки глаз расширены), а также не включен имитатор пульсации сонной артерии 21 (Фиг.1) (вариант несчастного случая, когда у пострадавшего человека отсутствует пульс ввиду остановки работы его сердца).
В режиме "ЭКЗАМЕН" функционирование робота-тренажера происходит следующим образом. Поскольку переход из режима "ОБУЧЕНИЕ" в режим "ЭКЗАМЕН" можно производить простым нажатием и последующим удержанием (например, в течение 5 секунд) кнопки выбора режима работы 44 (Фиг.9), то начиная с этого момента инструктор включает секундомер и ведет отсчет времени, затраченного экзаменуемым на выполнение реанимационных действий.
В режиме "ЭКЗАМЕН" производится проверка, насколько хорошо экзаменуемый овладел навыками проведения прекардиального удара и сердечно-легочной реанимации, освоенными им в качестве обучающегося на этапе обучения.
Отличие режима "ЭКЗАМЕН" от режима "ОБУЧЕНИЕ" состоит в том, что в режиме "ЭКЗАМЕН" отсутствуют подсказки, формируемые блоком индикации 22 (Фиг.1), например, в форме звуковой сигнализации, об ошибках, допускаемых при проведении искусственной вентиляции легких, если не запрокинута на требуемый угол более 15° голова муляжа тела человека, или экзаменуемым не произведено зажатие крыльев носа 13 (Фиг.2). Отсутствуют также визуальная подсказка о правильности выполнения искусственной вентиляции легких, в частности не осуществляется индикация поднятия имитатора грудной клетки робота-тренажера.
Перед проведением реанимационных действий экзаменуемый должен определить наличие пульса у пострадавшего, в качестве которого выступает заявленный робот-тренажер. При констатации факта отсутствия пульса (имитатор пульсации сонной артерии 21 (Фиг.1) не работает) экзаменуемый приступает к выполнению цикла реанимационных действий.
В режиме "ЭКЗАМЕН" цикл реанимационных действий может, по усмотрению экзаменуемого, начинаться как с нанесения прекардиального удара, так и с проведения сердечно-легочной реанимации. Перед нанесением прекардиального удара экзаменуемый прикрывает двумя пальцами одной руки место расположения имитатора мечевидного отростка, в зоне позиционирования которого размещают датчик нажатия на мечевидный отросток 43 (Фиг.1), а затем кулаком другой руки наносит удар в указанную зону по эластичной оболочке 1 (Фиг.1) муляжа тела человека робота-тренажера. Импульс ударной волны распространяется по муляжу робота-тренажера и воздействует на датчик удара 40 (Фиг.1). Если прекардиальный удар нанесен правильно, то датчик удара 40 (Фиг.1) сигнализирует системе управления 45 (Фиг.9) об этом. После обработки сигнала датчика удара 40 (Фиг.1) система управления 45 (Фиг.9) выдает команду на "оживление" робота-тренажера, что выражается в восстановлении его "сердечной деятельности" путем включения примерно на 60 секунд имитатора пульсации сонной артерии 21 (Фиг.1) и коммутации электроцепи подсветки зрачков имитаторов глаз 9 (фиг.1). Подсветка зрачков имитаторов глаз 21 (Фиг.1) робота-тренажера создает иллюзию их сужения по типу сужения зрачков у реально пострадавшего человека, находящегося в сознании. Подсветка зрачков имитаторов глаз 9 (фиг.1) свидетельствует о том, что робот-тренажер тоже находится "в сознании", а в области расположения сонной артерии экзаменуемый может почувствовать пульсацию с частотой примерно 1 Гц (т.е. 60 пульсирующих толчков в минуту). Примерно через 60 секунд система управления 45 (Фиг.9) выключает имитатор пульсации 21 (Фиг.1) и обесточивает цепь питания подсветки имитаторов глаз 9 (Фиг.1), оставаясь в режиме "ЭКЗАМЕН". Присутствующий при сдаче экзамена инструктор секундомером фиксирует время, затраченное экзаменуемым на выполнение этого реанимационного действия, и, с учетом результата сравнения затраченного времени с принятым нормативом, дает оценку полученному результату.
При выполнении прекардиального удара экзаменуемый может непреднамеренно (например, в силу слабых навыков) ударить кулаком в зону позиционирования мечевидного отростка, где размещен датчик нажатия на мечевидный отросток 42 (Фиг.1). В таком случае упомянутый датчик сигнализирует системе управления 45 (Фиг.9) об ошибочном действии экзаменуемого. После обработки сигнала о допущенной ошибке, полученного с датчика нажатия на мечевидный отросток 42 (Фиг.1), система управления 45 (Фиг.1) блокирует все программы робота-тренажера по реанимационным действиям и все коммутирующие узлы датчиков, кроме кнопки выбора режима работы 44 (Фиг.9), а затем выдает команду на включение звуковой сигнализации и светового индикатора нажатия на мечевидный отросток 43 (Фиг.1), который подсвечивает область позиционирования мечевидного отростка на муляже тела человека, оповещая инструктора и экзаменуемого о неумелых действиях последнего. Допущенная ошибка считается фатальной, поскольку в реальных условиях она может привести к летальному исходу для пострадавшего человека. Адекватно этой реальной ситуации летального исхода инсценируется и "смерть" робота-тренажера. При этом его световая и звуковая сигнализация не прерываются до момента кратковременного (примерно 1 секунда) нажатия на кнопку выбора режима работы 44 (Фиг.9), после чего система управления 45 (Фиг.9) возвращается в режим "ЭКЗАМЕН" и снова ожидает начала проведения реанимационных действий. В этом случае инструктор отрицательно оценивает достигнутый экзаменуемым результат.
Если после первого выполненного экзаменуемым удара по грудине муляжа тела человека робота-тренажера не появились признаки функционирования имитатора пульсации сонной артерии 21 (Фиг.1), экзаменуемый должен приступить к сердечно-легочной реанимации, проводимой либо в полном объеме, либо проводимой с использованием только непрямого массажа сердца (упомянутая ранее "безвентиляционная" - ручная реанимация).
В режиме "ЭКЗАМЕН" реанимационные действия проводятся следующим образом. Сначала одной рукой экзаменуемый обхватывает подбородок муляжа тела человека робота-тренажера, а другой рукой зажимает крылья 13 (Фиг.1) имитатора носа. Нажатие на крылья носа 13 (Фиг.1) робота-тренажера соответствует зажатию носовых отверстий реальному пострадавшему, при этом в имитаторе ротоносоглотки 23 (Фиг.3) перекрывается выход сопла имитатора ротоносоглотки 27 (Фиг.6) и включается датчик зажатия носовых отверстий 33 (Фиг.6). Далее экзаменуемый запрокидывает голову муляжа тела человека 2 (Фиг.6) робота-тренажера. При ее запрокидывании на угол не менее 15° имитатор языка 30 (Фиг.6) под воздействием сил гравитации покидает кромку выходного отверстия 26 (Фиг.6), представляющую собой седло, тем самым запуская работу датчика пространственного положения имитатора языка 35 (Фиг.2) и открывая выходное отверстие имитатора ротоносоглотки 26 (Фиг.6). После этого экзаменуемый должен сделать глубокий вдох (набрав максимально возможное количество воздуха в свои легкие), наклониться и плотно прижать свои губы к линии губ имитатора рта 10 (Фиг.2) робота-тренажера и сделать выдох воздуха из своих легких в ротовое отверстие имитатора рта 11 (Фиг.6). В результате движения потока воздуха срабатывает датчик принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2), а поток воздух будет перемещаться по направлению 39 (Фиг.6) через входное отверстие имитатора ротоносоглотки 25 (Фиг.6), камеру имитатора ротоносоглотки 24, огибая воздуховод 29 (Фиг.6), через выходное отверстие имитатора ротоносоглотки 26 (Фиг.6), по имитатору трахеи 20 (Фиг.1), и затем через входное отверстие имитатора легких 16 (Фиг.1) устремляется в рабочий объем имитатора легких 19 (Фиг.1). Если экзаменуемый произвел выдох в ротовое отверстие имитатора рта 11 (Фиг.6) с достаточно мощным усилием, то поток воздух, попав в рабочий объем имитатора легких 19 (Фиг.1), создает в нем избыточное давление, поскольку несмотря на наличие выходного отверстия имитатора легких 18 (Фиг.1) воздух задерживается и накапливается в указанном рабочем объеме из-за того, что входное отверстие имитатора легких 16 (Фиг.1) больше по проходному сечению, чем аналогичный размер выходного отверстия имитатора легких 18 (фиг.1). В результате накопления принудительно вдыхаемого воздуха в рабочем объеме имитатора легких 19 (Фиг.1) в нем происходит увеличение давления и эластичный мешок имитатора легких 17 (Фиг.1) раздвигает края подковообразной пластины имитатора грудной клетки 14 (Фиг.1), т.е. происходит имитация подъема грудной клетки в туловище муляжа тела человека 3 (Фиг.1, Фиг.7). При этом эластичный мешок имитатора легких 17 (Фиг.1) вследствие избыточного давления в рабочем объеме имитатора легких 19 (Фиг.1) оказывает прямое механическое воздействие на датчик поднятия грудной клетки 41 (Фиг.1), тем самым формируя сигнал об этом событии.
В результате проведенного реанимационного действия в систему управления 45 (Фиг.9) почти одновременно поступают четыре сигнала от датчиков (Фиг.1, Фиг.2) 32 (датчик принудительного поступления воздуха в ротовое отверстие), 33 (датчик зажатия носовых отверстий имитатора носа), 35 (датчик пространственного положения имитатора языка), и 41 (датчик поднятия грудной клетки), что свидетельствует о правильно выполненном экзаменуемым цикле искусственной вентиляции легких.
После получения экзаменуемым положительного результата реанимационного действия в виде поднятия грудной клетки он приступает к выполнению цикла непрямого массажа сердца.
В рамках сдачи норматива выполнения непрямого массажа сердца экзаменуемый начинает ритмично давить на область грудины, транслируя создаваемое этим механическое давление на подковообразную пластину имитатора грудной клетки 14 (Фиг.1), а через нее - на эластичный мешок имитатора легких 17 (Фиг.1), выдавливая из рабочего объема 19 (Фиг.1) воздух, одна часть которого стравливается через выходное отверстие имитатора легких 18 (Фиг.1) наружу, а вторая часть этого воздуха, проходя имитатор трахеи 20 (Фиг.1) и имитатор ротоносоглотки 23 (Фиг.1, Фиг.1), выводится через сопло имитатора ротоносоглотки 27 (Фиг.1, Фиг.2) под эластичную оболочку 1 (Фиг.1).
Однако перед этим вторая часть воздуха, входя под избыточным давлением в контакт с частью поверхности имитатора языка 30 (Фиг.3) через выходное отверстие имитатора легких 18 (Фиг.3), сталкивает со своего седла сферический имитатор языка 30 (Фиг.3), что регистрируется посредством датчика пространственного положения имитатора языка 35 (Фиг.2).
Кроме фиксации упомянутым датчиком движение потока воздуха в ротовом отверстии имитатора рта 11 (Фиг.3) дополнительно фиксируется датчиком принудительного поступления воздуха в 32 (Фиг.2).
Таким образом, при каждом нажатии на грудину муляжа тела человека происходит смещение имитатора языка 30 (Фиг.3-Фиг.6), выполняющего функцию клапана, управляемого гравитацией, со своего седла, образованного кромкой выходного отверстия имитатора ротоносоглотки 26 (Фиг.3-Фиг.6), с высокой степенью приближения к реальности воспроизводя процесс освобождения у пострадавшего человека глоточного пространства от "провалившегося" в него языка. Соответственно этому, в реальных условиях реанимационных действий полностью обеспечивается прохождение потока воздуха из легких по верхним дыхательным путям в носовые отверстия. В предлагаемом роботе-тренажере в качестве носовых отверстий выступает сопло имитатора ротоносоглотки 27 (Фиг.3-Фиг.6). Воздух, выдавленный из рабочего объема имитатора легких 19 (Фиг.1), не может выходить через ротовое отверстие 11 (Фиг.2), потому что в нем установлен обратный клапан 31 (Фиг.2). А чтобы имитатор языка 30 (Фиг.3) сместился со своего седла, в качестве которого выступает кромка выходного отверстия имитатора ротоносоглотки 26 (Фиг.3), необходимо быстро и с усилием не менее 15 кг нажать на подковообразную пластину имитатора грудной клетки 14 (Фиг.1). В этом случае каждое верно приложенное экзаменуемым усилие фиксируется тремя датчиками, а именно: датчиком поднятия грудной клетки 41 (Фиг.1), датчиком пространственного положения имитатора языка 35 (Фиг.2) и датчиком принудительного поступления воздуха в ротовое отверстие 32 (Фиг.2). Сигналы с этих датчиков поступают на систему управления 45 (Фиг.9), которая анализирует правильность выполнения данного реанимационного действия. Нажатия на грудину муляжа тела человека робота-тренажера с усилием менее 15 кг датчиком принудительного поступления воздуха 32 (Фиг.2) и датчиком пространственного положения имитатора языка 35 (Фиг.2) не фиксируются, так как в этом случае не происходит смещения имитатора языка 30 (Фиг.3) с внутренней кромки выходного отверстия имитатора ротоносоглотки 26 (Фиг.3) и воздух в его камеру 24 (Фиг.3) не может поступить, а стравливается в атмосферу через выходное отверстие имитатора легких 18 (Фиг.1).
Правильность выполнения экзаменуемым непрямого массажа сердца оценивается не только по почти одновременному срабатыванию датчика поднятия грудной клетки 41 (фиг.1), датчика пространственного положения имитатора языка 35 (Фиг.1) и датчика принудительного поступления воздуха в ротовое отверстие 32 (Фиг.1), но и по частоте их срабатывания, т.е. по временному интервалу между нажатиями. Программно в заявляемом роботе-тренажере этот временной интервал задан промежутком от 0,7 до 1,5 секунд.
Первый успешно выполненный цикл искусственной вентиляции легких плюс непрямого массажа сердца (или цикл непрямого массажа сердца плюс искусственной вентиляции легких) система управления 45 (Фиг.9) отмечает подсветкой зрачков имитатора глаз 9 (фиг.1). Подсветка зрачков глаз робота-тренажера создает эффект суженных зрачков, присущих реальному пострадавшему, который пришел в сознании. Подсветка зрачков имитаторов глаз 9 (Фиг.1) у робота-тренажера свидетельствует о том, что робот-тренажер условно говоря "находится в сознании".
Проведение сердечно-легочной реанимации постоянно сопряжено с контролем результатов со стороны системы управления 45 (Фиг.9), при этом любая из вышеуказанных ошибок при выполнении цикла искусственной вентиляции легких или непрямого массажа сердца четко регистрируется системой управления 45 (Фиг.9), в результате чего она выключает подсветку зрачков имитаторов глаз 9 (Фиг.1). Последнее обстоятельство приводит к увеличению времени, которое экзаменуемый тратит на "оживление" робота-тренажера. Очередной успешно выполненный цикл искусственной вентиляции легких плюс непрямого массажа сердца (или цикл непрямого массажа сердца плюс искусственная вентиляция легких) снова сопровождается возобновлением подсветки зрачков имитаторов глаз 9 (фиг.1), то есть робот-тренажер опять "находится в сознании".
Система управления 45 (фиг.1) после 8-10 подряд успешно выполненных реанимационных циклов искусственной вентиляции легких плюс непрямой массаж сердца (или наоборот) "оживляет" робота-тренажера, что проявляется в восстановлении его "сердечной" деятельности, характеризующейся тем, что подсветка зрачков имитаторов глаз 9 (фиг.1) дополняется включением имитатора пульсации сонной артерии 21 (Фиг.1) примерно на 60 секунд.
В момент указанного "оживления" робота-тренажера инструктором фиксирует время, затраченное экзаменуемым на получение успешного результата. Примерно через 60 секунд система управления 45 (Фиг.1) выключает имитатор пульсации сонной артерии 21 (Фиг.1) и обесточивает подсветку имитаторов глаз 9 (Фиг.1), оставаясь в режиме "ЭКЗАМЕН".
Следует отметить, что в режиме "ЭКЗАМЕН" при проведении непрямого массажа сердца допускается не более пяти фактов повреждения ребер. Система управления 45 (Фиг.9) фиксирует каждый случай полома ребер и выдает команду на включение соответствующего светового индикатора посредством блока индикации 22 (Фиг.1), например, красного спектра, для подсвечивания области сломанного ребра на имитаторе грудной клетки, оповещая об этом инструктора и экзаменуемого. В реальных условиях в момент перелома ребра отчетливо слышен хруст. Если экзаменуемый своими ошибочными действиями допускает фиксацию системой управления 45 (Фиг.9) "поломки" шестого ребра робота-тренажера, то система включает посредством блока индикации 22 (Фиг.1) шестой по счету индикатор сломанного ребра и запускает в действие звуковую сигнализацию, почти одновременно выключив при этом подсветку зрачков имитаторов глаз 9 (Фиг.1). При этом система управления 45 (Фиг.9) блокирует все программы и работу датчиков робота-тренажера (кроме кнопки выбора режима работы 44 (Фиг.9). Инструктор при достижении экзаменуемым подобного рода результата оценивает его действия как неудовлетворительные.
Работа световой и звуковой сигнализация блока индикации 22 (Фиг.1) не прерывается до момента кратковременного (примерно равного 1 секунде) нажатия инструктором или экзаменуемым на кнопку выбора режима работы 44 (Фиг.9). После поступления сигнала с кнопки 44 (Фиг.9) система управления 45 (Фиг.9) возвращается в режим "ЭКЗАМЕН" и ожидает начала проведения нового цикла реанимационных действий.
В режиме "ЭКЗАМЕН" вместо искусственной вентиляции легких допускается выполнение "безвентиляционной" (ручной) реанимации в форме непрямого массажа сердца.
Ритмичные нажатия на грудину муляжа тела человека робота-тренажера проводятся экзаменуемым в течение 3-6 минут. Как и в вышеописанных случаях ручной сердечно-легочной реанимации экзаменуемый ритмично прикладывает нагрузку в области грудины муляжа тела человека. Результаты этого воздействия не отличаются от предыдущего описания результатов поведения робота-тренажера при осуществлении механического воздействия на его имитатор грудной клетки, поэтому их повторное описание не производится.
Отличие этой процедуры, исполняемой в режиме "ЭКЗАМЕН", от вышеописанной процедуры, исполняемой в режиме "ОБУЧЕНИЕ", состоит в том, что в режиме "ЭКЗАМЕН" при проведении ручной сердечно-легочной реанимации для получения положительной оценки экзаменуемым допускается не более пяти частых нажатий на грудину муляжа тела человека, поскольку каждое частое нажатие на имитатор грудной клетки по существу квалифицируется системой управления 45 (Фиг.1) как слом ребра. Поэтому система управления 45 (Фиг.9) в порядке оповещения дает команду на включение соответствующей световой индикации посредством блока индикации 22 (Фиг.1), например, красного спектра, для подсвечивания области размещения сломанного ребра. Если экзаменуемый "ломает" шестое ребро роботу-тренажеру, система управления 45 (Фиг.9) включает шестой по счету индикатор перелома ребер и звуковую сигнализацию, блокирует все программы и функционирование всех датчиков (кроме кнопки выбора режима работы 44 (Фиг.9). Инструктор отрицательно оценивает результаты таких реанимационных действий экзаменуемого.
После, примерно, 200-300 подряд успешно выполненных нажатий система управления 45 (Фиг.9) имитирует "оживление" робота-тренажера, для чего она обеспечивает включение примерно на 60 секунд имитатор пульсации сонной артерии 21 (Фиг.1) и подсветку имитаторов глаз 9 (Фиг.1). По истечении 60 секунд система управления 45 (Фиг.9) отключает имитатор пульсации сонной артерии 21 (Фиг.1) и обесточивает подсветку имитаторов глаз 9 (Фиг.1), оставаясь в рамках режима "ЭКЗАМЕН".
ПРИМЕР 3.
Робот-тренажер используют в режиме "КОМА" (Фиг.4). Вначале включают электрическое питание блока управления 45 (Фиг.9). При этом включении система управления 45 (Фиг.9) входит в состояние автоматического самотестирования. Происходит проверка работоспособности всех датчиков и исполнительных устройств индикации. В случае положительного исхода самотестирования робот-тренажер готов к использованию. Его исходное состояние характеризуется тем, что не включена подсветка радужной оболочки имитаторов глаз 9 (Фиг.1) и функционирует имитатор пульса сонной артерии 21 (Фиг.1). В переводе на язык описания состояние реального пострадавшего это означает потерю человеком сознания, но сердце пострадавшего продолжает сокращаться.
В режиме "КОМА" приобретаются навыки оказания помощи пострадавшим, находящимся в бессознательном состоянии.
В режиме "КОМА" использование робота-тренажера происходит следующим образом. Возможен переход из режима "ЭКЗАМЕН" в режим "КОМА", для чего необходимо нажать на кнопку выбора режима работы 44 (Фиг.9) и удерживать ее в этом положении, например, не менее 5 секунд. Начиная с этого момента, инструктор включает секундомер и ведет отсчет времени, затраченного спасателем на выполнение реанимационных действий. Перед проведением реанимационных действий в режиме "КОМА" спасатель обязан проверить, работает ли имитатор пульсации сонной артерии 21 (Фиг.1) робота-тренажера (соприкасаясь рукой с областью сонной артерии муляжа тела человека). Если факт наличия пульсации зафиксирован спасателем, он приступает к дальнейшему этапу выполнения реанимационных действий. Для принятия решения и выполнения реанимационных действий в режиме "КОМА" спасателю программно отводится промежуток времени от 20 до 30 секунд. Если в указанный временной интервал спасателем реанимационные действия не начаты, результат бездействия спасателя инструктор оценивает как неудачу. Система управления 45 (Фиг.9) при этом блокирует все программы и функционирование всех датчиков (кроме кнопки выбора режима работы 44 (Фиг.9)), а затем выдает команду на включение звуковой сигнализации, оповещая спасателя и его инструктора о неудовлетворительном результате. Ошибку бездействия спасателя свыше 20-30 секунд принято считается фатальной ошибкой и робот-тренажер инсценирует "смерть". При этом звуковая сигнализация, оповещающая об отрицательном результате реанимационных действий спасателя в режиме "КОМА", не прерывается до момента кратковременного (примерно около 1 секунды) нажатия одним из присутствующих на кнопку выбора режима работы 44 (Фиг.9). После этого система управления 45 (Фиг.9) возвращается в состояние режима "КОМА" и снова ожидает начала проведения следующего цикла реанимационных действий.
Реанимационные действия в режиме "КОМА" оцениваются как успешные, если спасатель в нормативно установленное для принятия решения и его воплощения время смог определить наличие "пульса" и перевернуть муляж тела человека на живот. При этом имитатор языка 30 (Фиг.4)под воздействием гравитации смещается со своего седла, которым ему служит внутренняя кромка выходного отверстия имитатора ротоносоглотки 26 (Фиг.4), подражая характеру движения реального языка пострадавшего в его ротоглотке. Результатом смещения имитатора языка 30 (Фиг.4) является, как и в реальности, освобождение проходимости глотки, в силу чего воздух может свободно поступать через верхние дыхательные пути в легкие и выводиться обратно. Смещение имитатора языка 30 (Фиг.4) фиксируется датчиком пространственного положения имитатора языка 35 (Фиг.2). Если при выполнении указанных действий в течение последующих 10-30 секунд робот-тренажер остается лежащим на имитаторе живота, система управления 45 (Фиг.9) фиксирует правильность выполнения данного реанимационного действия и вырабатывает команду на включение подсветки радужных оболочек имитаторов глаз 9 (Фиг.1). Через примерно 60 секунд после фиксации успеха в приобретении данного навыка система управления 45 (Фиг.9) выключает подсветку зрачка имитаторов глаз 9 (Фиг.1) и прекращает работу имитатора пульсации сонной артерии 21 (Фиг.1), оставаясь в режиме "КОМА". Если имитатор языка 30 (Фиг.4) изготовлен из непрозрачного материала, то в качестве элементов датчика пространственного положения 35 (Фиг.2) могут быть применены оптоэлектронные пары.
ПРИМЕР 4.
Заявленный робот-тренажер используют в режиме "БОЛЬ". (Фиг.7, Фиг.8). При включении электропитания система управления 45 (Фиг.9) входит в состояние автоматического самотестирования. Завершив самотестирование, робот-тренажер готов к использованию в режиме "БОЛЬ". Если робот-тренажер уже был включен и использовался в режиме "КОМА", то для перехода из режима "КОМА" в режим "БОЛЬ" необходимо нажать на кнопку выбора режима 44 (Фиг.9) и удержать ее в этом положении не менее заданного времени, например 5 секунд. Исходное состояние режима "БОЛЬ" характеризуется тем, что включена подсветка радужных оболочек имитаторов глаз 9 (Фиг.1) (следовательно зрачки имитаторов глаз 9 сужены, сообщая о нахождении пострадавшего в состоянии сознания), включен имитатор пульсации сонной артерии 21 (Фиг.1) (прослушивается "пульс"), а поверхность узла сочленения 36 (Фиг.7, Фиг.8) не деформирована (т.е. эластичная оболочка 1 (Фиг.1) не находится в напряженном состоянии, что соответствует отсутствию механического воздействия на нее). Этот режим предназначен для обучения спасателя навыкам бережного и аккуратного обращения с пострадавшим (предполагающем исключение возникновения у пострадавшего сильных болевых ощущений, например, при наложении повязки на травмированные тело и/или конечность, или его транспортировке). В режиме "БОЛЬ" робот-тренажер используют следующим образом. Нижняя конечность 4 (Фиг.7 и Фиг.8) муляжа тела человека робота-тренажера выполнена упругой, и как остальные конечности муляжа тела человека, повторяя контуры конечностей реального человека, представляет собой полую упругую камеру с классическим узлом сочленения 36 (Фиг.7, Фиг.8) с туловищем муляжа тела человека 3 (Фиг.7 и Фиг.8), также выполненным по существу в виде полой упругой камеры. Узел сочленения туловища 3 (Фиг.7 и Фиг.8) и нижней конечности 4 (Фиг.7, Фиг.8) муляжа тела человека представляет собой единое целое 36 (Фиг.7, Фиг.8). Узел сочленения 36 (Фиг.7, Фиг.8) со стороны туловища муляжа тела человека 3 (Фиг.7, Фиг.8) выполнен в виде цилиндрического отверстия относительно большого диаметра с утолщенными кромками. Нижняя конечность муляжа тела человека 4 (Фиг.1, Фиг.8) завершается полым узлом грибовидной формы, но с плоской торцевой поверхностью (типа "шляпки"), ответной вышеуказанному цилиндрическому отверстию. Узел сочленения 36 (Фиг.7, Фиг.8) выполнен с возможностью взаимного удержания туловища 3 (Фиг.7, Фиг.8) и нижней конечности 4 (Фиг.7, Фиг.8) посредством кромки упомянутой "шляпки". Эластичная оболочка 1 (Фиг.1) может быть выполнена толщиной от 1 до 3 мм. Узел сочленения 36 (Фиг.1, Фиг.8) снабжается отверстием 37 (Фиг.7, Фиг.8) диаметром от 2 до 3 мм для обеспечения свободного проникновения воздуха внутрь эластичной оболочки нижней конечности 4 (Фиг.7, Фиг.8) муляжа тела человека. Датчик давления средства индикации боли 38 (Фиг.1, Фиг.8) может представлять собой, например, дифференциальный датчик давления мембранного типа или тензометрический датчик, устанавливается на плоской поверхности ("шляпке") узла сочленения 36 (Фиг.7, Фиг.8). При нажатии на нижнюю конечность 4 (Фиг.7, Фиг.8) происходит ее деформация и, как следствие, изменение ее внутреннего объема. В частности указанный объем может либо увеличивается, либо уменьшатся в зависимости от точки приложения механического усилия. В результате этого механического воздействия давление воздуха внутри объема нижней конечности 4 (Фиг.7, Фиг.8) муляжа тела человека на некоторое время изменится, то есть будет больше или меньше текущего давления атмосферы, что в свою очередь приводит к деформации плоской поверхности узла сочленения 36 (Фиг.7, Фиг.8) ("шляпки"), она, подобно мембране, изменит свою кривизну и приобретет прогиб (штриховая линия на Фиг.8). Этот прогиб, обусловленный появлением перепада давления воздуха под воздействием механической нагрузки на эластичную оболочку 1 (Фиг.1) в отсеках, образованных эластичной оболочкой 1 (Фиг.1), под которыми понимаются внутренний объем туловища и внутренний объем конечностей муляжа тела человека, может быть относительно легко зафиксирован, например, тензодачиком. Мембраноподобная поверхность ("шляпка") узла сочленения 36 (Фиг.7, Фиг.8) находится в состоянии прогиба до тех пор, пока давление воздуха в смежном отсеке муляжа тела человека (например, в нижней конечности 4 (Фиг.7 и Фиг.8) не сравняется с атмосферным давлением воздуха. Процесс уравнивания давления воздуха снаружи и внутри эластичной оболочки 1 (Фиг.1) обеспечивается за счет отверстия 37 (Фиг.1, Фиг.8), через него воздух будет или стравливаться из внутреннего объема, например, нижней конечности, или всасывается в этот внутренний объем. Вместо тензодатчика в узел сочленения 36 (Фиг.7, Фиг.8) можно вмонтировать датчик 37 (Фиг.7, Фиг.8) давления мембранного типа. В подобном варианте изготовления перепады давления воздуха в объеме эластичной оболочки 1 (Фиг.1) туловища 3 (Фиг.7,Фиг.8) муляжа тела человека и нижней конечности 4 (Фиг.7, Фиг.8) будет принимать на себя эластичная мембрана датчика давления 38 (Фиг.7, Фиг.8), которая может быть выполнена в несколько раз меньшей толщины, чем толщина эластичной оболочки 1 (Фиг.1), и обладать, в силу указанной причины, большей чувствительностью, чем датчик на основе материала эластичной оболочки 1 (Фиг.1). Информация с датчика давления средства индикации боли 38 (Фиг.7, Фиг.8) поступает в систему управления 45 (Фиг.9). Если при перевязке или при транспортировке уровень механического воздействия в форме нажатия на нижнюю конечность 4 (Фиг.7, Фиг.8) или на туловище 3 (Фиг.7, Фиг.8) муляжа тела человека превысит некоторый заранее заданный уровень, то система управления 45 (Фиг.9) включит звуковой сигнал (например, в виде слов "больно"), который длится до тех пор, пока давление в камере (одной из конечностей или туловище) не сравняется с атмосферным давлением воздуха. При этом внешнее воздействие еще не будет снято. Как только внешнее воздействие устранено, то под действием упругих сил камера, например, нижней конечности 4 (Фиг.7, Фиг.8), начнет возвращаться в исходное по форме состояние. Указанное возвращение камеры к первоначальной форме (в ненапряженное состояние камеры, образованной внутренним объемом, например, нижней конечности 4 (Фиг.7, Фиг.8)), приводит к возникновению разреженного состояния воздуха внутри нее, что вызывает появление прогиба плоской поверхности сочленения ("шляпки") в сторону камеры с меньшим давлением воздуха в ней. Информацию о появлении прогиба датчик давления средства индикации боли 38 (Фиг.7, Фиг.9) передает системе управления 45 (Фиг.9), при этом система управления 45 (Фиг.9) включает звуковой сигнал, длящийся до тех пор, пока давление воздуха в сопряженных камерах не сравняется с атмосферным давлением воздуха. Таким образом, датчик давления средства индикации боли 38 (Фиг.7, Фиг.8) реагирует как на появление внешнего воздействия на эластичную оболочку 1 (Фиг.1) туловище 3 (Фиг.7, Фиг.8) или сопряженной с ним конечности (в частности, нижней конечности 4 (Фиг.7, Фиг.8)) муляжа тела человека, так и на снятие указанного механического воздействия. Это позволяет четко зафиксировать ошибку спасателя, что повышает качество обучения и является приближением к реальной ситуации, при которой чрезмерное механическое воздействие на пострадавшего человека вызывает у него появление чувства боли. При пяти допущенных ошибках, т.е. при десяти срабатываниях датчика давления средства индикации боли 38 (Фиг.7, Фиг.8), система управления 45 (Фиг.9) выключает имитаторы глаз 9 (Фиг.1) и имитатор пульсации сонной артерии 21 (Фиг.1). Робот-тренажер остается в режиме "БОЛЬ", но больше никаких реанимационных действий не воспринимает.
Для перевода робота-тренажера в исходное состояние необходимо нажать на кнопку выбора режима работы 44 (Фиг.9) и удерживать ее в нажатом состоянии примерно одну секунду, в результате чего система управления 45 (Фиг.9) включит имитаторы глаз 9 (Фиг.1) и имитатор пульсации сонной артерии 21 (Фиг.1) и будет ожидать начала выполнения реанимационных действий в режиме "БОЛЬ".
Для изготовления и эксплуатации предлагаемого робота-тренажера не требуется использования технологий, материалов, узлов и компонентов, создание и применение которых сопряжено с работами, носящими характер творчества или научного исследования.
Вышесказанное позволяет сделать вывод о соответствии предложенного объекта критерию изобретения "промышленная применимость".
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2176822, МПК7 G 09 B 23/28 "Тренажер для обучения приемам помощи человеку при неотложных состояниях", опубликован 10.12.2001 г., заявитель: Лутаенко В.Ф.
2. Патент РФ №2134913, МПК6 G 09 B 23/28 "Робот-тренажер", опубликован 20.08.1999 г., авторы-заявители: Близнец В.М. и Мартынцев П.П.
3. Патент РФ №2144218, МПК7 G 09 B 23/28 "Тренажер для отработки навыков первой медицинской помощи", опубликован 10.01.2000 г., заявитель: Бубнов В.Г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ | 1999 |
|
RU2144218C1 |
| ДАТЧИК ИМИТАЦИИ БОЛЕВОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2180762C1 |
| МЕДИЦИНСКИЙ РОБОТ-ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МАНИПУЛЯЦИОННОЙ ТЕХНИКЕ | 2000 |
|
RU2200979C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ЭКСТРЕННОЙ ТРАВМАТОЛОГИЧЕСКОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ | 1993 |
|
RU2124762C1 |
| ИНТЕРАКТИВНЫЙ ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПО ОКАЗАНИЮ ПЕРВОЙ ПОМОЩИ ЧЕЛОВЕКУ ПРИ ЗАКУПОРКЕ ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ | 2013 |
|
RU2550665C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ПОМОЩИ ЧЕЛОВЕКУ ПРИ НЕОТЛОЖНЫХ СОСТОЯНИЯХ | 1998 |
|
RU2176822C2 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ НАВЫКАМ ПЕРВОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ ДЕТЯМ | 2001 |
|
RU2189640C1 |
| РОБОТ-ТРЕНАЖЕР | 1998 |
|
RU2134913C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И РАЗВИТИЯ НАВЫКОВ ВЫПОЛНЕНИЯ ИСКУССТВЕННОГО ДЫХАНИЯ РОТ В РОТ | 2022 |
|
RU2791812C1 |
| Медицинский тренажер | 1983 |
|
SU1121700A1 |
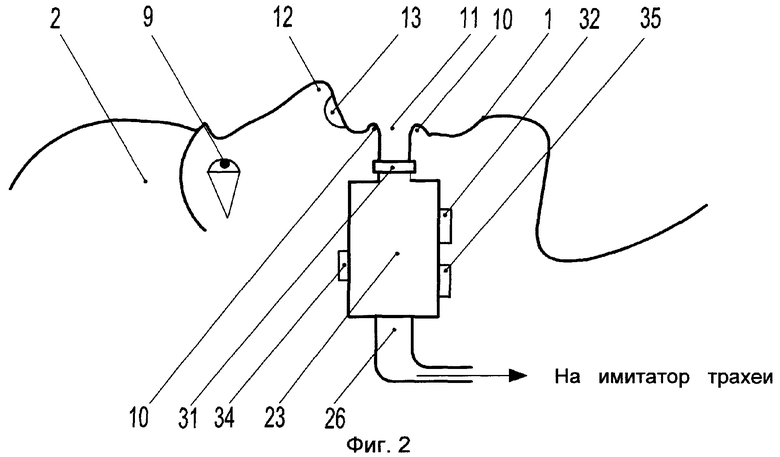


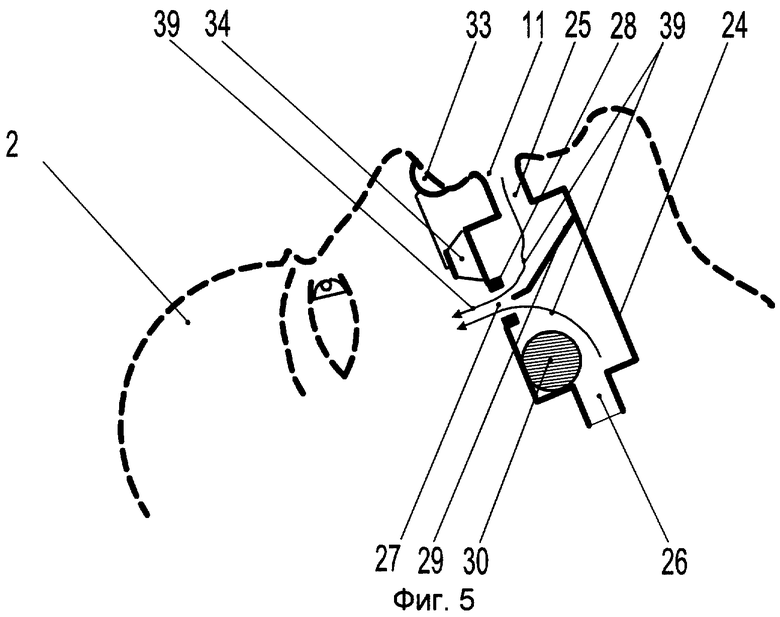
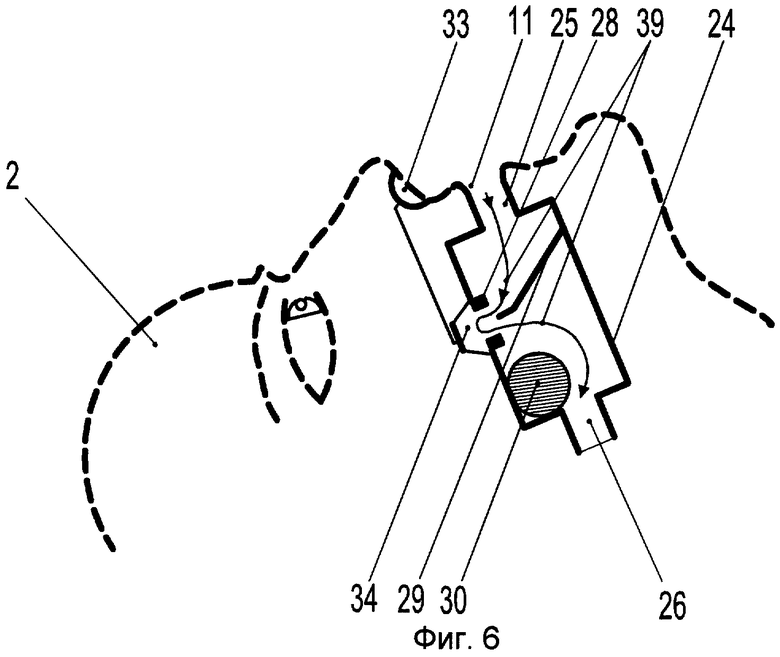

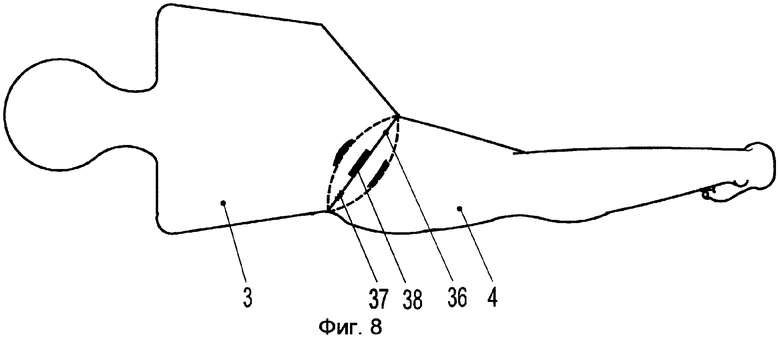
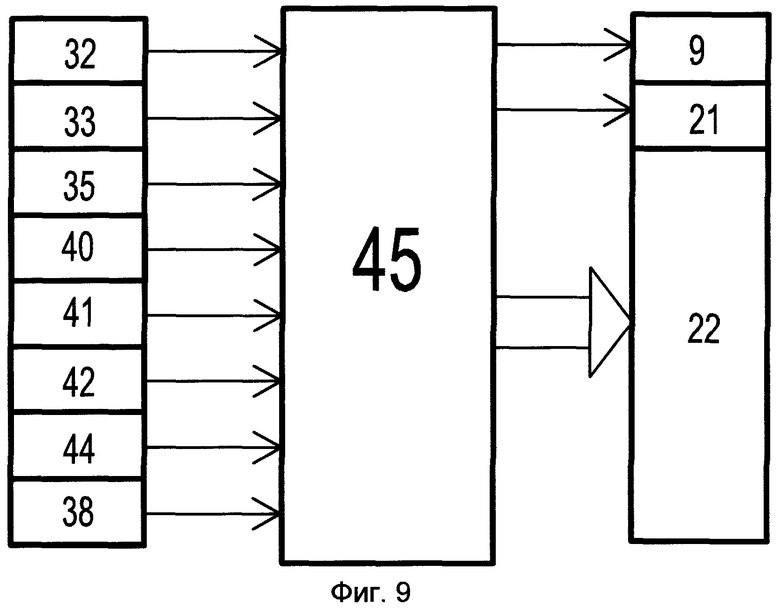
Изобретение относится к области медицины. Робот-тренажер содержит эластичную оболочку в виде муляжа тела человека, составной каркас, средства фиксации каркаса с эластичной оболочкой, имитаторы глаз с возможностью визуализации реакции зрачка, имитатор рта с линией губ и ротовым отверстием, имитатор носа с крыльями носа, имитатор грудной клетки, образованный профилированной пластиной, имитатор легких, имитатор трахеи, имитатор пульсации сонной артерии с электромагнитным исполнительным механизмом, блок индикации, средство управления с блоком питания и датчик удара. Имитатор легких в виде эластичного мешка с входным и выходным отверстиями закреплен внутри имитатора грудной клетки. Имитатор трахеи в виде гибкой трубки одним из концов соединен с входным отверстием имитатора легких. Робот-тренажер оснащен имитатором ротоносоглотки, имитатором связок, имитатором языка, датчиком зажатия отверстий имитатора носа, датчиком принудительного поступления воздуха в ротовое отверстие имитатора рта, датчиком пространственного положения имитатора языка и средством индикации боли. Имитатор языка выполнен в виде сферы. Имитатор ротоносоглотки выполнен в виде камеры с входным отверстием в верхней торцевой части камеры, соединенным с имитатором рта через обратный клапан, и выходным отверстием в донной торцевой части камеры, соединенным с вторым концом имитатора трахеи. В центральной области стенки камеры выполнено сопло в форме отверстия. С внутренней поверхностью стенки в области, примыкающей к входному отверстию, одним из своих концов жестко скреплен формирователь струи воздуха в виде воздуховода. Вторым своим концом он позиционирован у сопла симметрично его отверстию. С внешней стороны камеры установлен клапан сопла с возможностью взаимодействия с датчиком зажатия отверстий имитатора носа. В качестве средства фиксации каркаса с эластичной оболочкой применен имитатор связок в виде текстильной липучки типа "репейник", закрепленной на обращенных друг к другу поверхностях каркаса и эластичной оболочки. Средство индикации боли в виде датчика давления установлено внутри одной из конечностей муляжа тела человека. Блок индикации размещен на передней стенке имитатора грудной клетки в виде распределенных звуковых и оптических источников информации. Изобретение позволяет обеспечить возможность отработки приемов оказания первой медицинской помощи пострадавшим людям в максимально приближенных к реальным условиях. 4 з.п. ф-лы, 9 ил.
| ТРЕНАЖЕР ДЛЯ ОТРАБОТКИ НАВЫКОВ ПЕРВОЙ МЕДИЦИНСКОЙ ПОМОЩИ | 1999 |
|
RU2144218C1 |
| МЕДИЦИНСКИЙ РОБОТ-ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МАНИПУЛЯЦИОННОЙ ТЕХНИКЕ | 2000 |
|
RU2200979C2 |
| ДАТЧИК ИМИТАЦИИ БОЛЕВОГО ВОЗДЕЙСТВИЯ | 2000 |
|
RU2180762C1 |
| РОБОТ-ТРЕНАЖЕР | 1998 |
|
RU2134913C1 |
| JP 2004233585 А, 19.08.2004. | |||

