Изобретение относится к области военной техники и может быть использовано при создании систем активной защиты как стационарных, так и подвижных объектов от атакующих кумулятивных управляемых ракет, выстрелов из гранатометов и кинетических снарядов (далее по тексту - атакующих боеприпасов (АБ)). Ведение боевых действий в городских условиях, в лесистой и горной местностях, а также насыщение пехотных частей реактивными гранатометами, применение самонаводящихся боеприпасов и переносных ракетных комплексов, атакующих защищаемые объекты из верхней полусферы, расширение до всеракурсности набор направлений на защищаемые объекты делает актуальной задачу обнаружения атак боеприпасов противника с любого направления Для решения этой задачи необходима разработка системы радиолокационной разведки комплекса активной защиты объекта для своевременного обнаружения АБ в пределах верхней полусферы относительно защищаемого объекта, определения их координат и параметров движения и своевременную выдачу команды на задействование защитного боеприпаса (ЗБ). Именно решение этих задач приведет к повышению эффективности применения комплексов активной защиты объектов от атакующих боеприпасов, что является целью предлагаемого изобретения.
Известны технические решения, направленные на разработку и создание систем активной защиты объектов от АБ противника. В способе формирования и определения момента выдачи команды на пуск ЗБ по патенту [1] момент выдачи команды на пуск ЗБ устанавливают по началу возникновения и обнаружения радиолокационной станцией (РЛС) сигнала с частотой Fдо=2Voƒo/c (где Vo - радиальная скорость защитного боеприпаса, ƒo - - средняя частота излучаемого РЛС непрерывного сигнала с частотной модуляцией, с - скорость света). Обнаружение сигналов узкополосного спектра частот осуществляют за счет частотной селекции сигналов, сравнения изменяющихся амплитудных значений отселектированных сигналов с опорным напряжением и фиксирования момента достижения равенства этих значений. К недостаткам способа относятся:
1) необходимость иметь в реализующем его устройстве две радиолокационные станции РЛС 1 и РЛС 2, выходы которых подключены ко входам блока совпадения;
2) применение миллиметрового диапазона волн, на которых возможно обнаружение пуль и осколков, не представляющих опасность для защищаемого объекта, по которым будет выдаваться команда на пуск ЗБ;
3) возможность обработки отраженного сигнала только от одного АБ, в то время как террористические атаки могут осуществляться одновременно с нескольких направлений как в горизонтальной, так и в вертикальной плоскостях [2].
Отличие способа формирования команды на пуск ЗБ по патенту [3] от способа по патенту [1] состоит только в том, что две реализующих его РЛС используют не два, а один общий передатчик. Поэтому отмеченные выше недостатки способа [1] остаются и в данном техническом решении.
В способе [4] в качестве защищаемого объекта выбран самолет, а антенны РЛС1 и РЛС2 расположены на его крыльях на расстоянии 10 м друг от друга. Таким образом, защита самолета осуществляется только на встречных курсах, в то время как самолет поражается зенитными ракетами с любого направления, в частности, и на догонных курсах. Кроме того, самолет поражается зенитной ракетой, как правило, не путем прямого попадания, а направленным потоком осколочного поля при срабатывании радиовзрывателя в упрежденной точке, т.е. при согласовании направления разлета осколков с диаграммой направленности антенны радиовзрывателя [5, 6].
Анализ других источников информации, показал, что все известные технические решения по данной тематике, например [7-11], ориентированы на защиту объектов только от одного АБ. Известен способ наведения оружия и ракеты на цель по патенту [12], в котором в качестве защитного боеприпаса, обеспечивающего поражение опасного для защищаемого объекта АБ, применяют радиоуправляемую ракету.
Сущность данного способа состоит в следующем. Сначала цель облучают четырьмя приемопередающими антеннами ППА1, ППА2, ППА3 и ППА4, установленными на плоской платформе, способной вращаться как по углу места, так и по азимуту, на окружности, на равном удалении по окружности друг от друга, с базовыми L расстояниями между диаметрально противоположными ППА1 и ППА2, а также ППА3 и ППА4, которые излучают в сторону приближающейся цели четыре непрерывных сигнала с частотной модуляцией по одностороннему пилообразно линейно спадающему закону, соответственно НЛЧМ1, НЛЧМ2, НЛЧМ3 и НЛЧМ4 сигналы, с близкими частотами ƒ1, ƒ2, ƒ3 и ƒ4 с одинаковыми у них частотой модуляции Fm и девиацией частоты dƒm, которые после отражения от цели принимаются соответственно ППА1, ППА2, ППА3 и ППА4, их перемножают с излученными соответственно НЛЧМ1, НЛЧМ2, НЛЧМ3 и НЛЧМ4 сигналами и после соответствующих преобразований формируют сигналы ошибки, которые преобразуются в управляющие сигналы для поворота платформы с антеннами, обеспечивающего точное наведения оружия на цель. После этого фиксируют положение платформы с антеннами и в сторону цели (атакующего боеприпаса) запускают ракету, начинают облучать ее четырьмя ППА и получать со стороны ракеты переотраженные ею НЛЧМ сигналы, с которыми производят аналогичные действия и после соответствующих преобразований формируют сигналы управления рулями, которые передают на борт ракеты, обеспечивая точное приближение ракеты к цели.
Данный способ имеет следующие недостатки:
способ ориентирован на активную защиту объекта только от одного АБ, так как все четыре антенны излучают зондирующий сигнал в сторону приближающейся цели и принимают отраженный от нее сигнал, в то время как в современных условиях террористические атаки могут осуществляться с любого направления относительно защищаемого объекта [2];
применение в качестве ЗБ управляемой ракеты с компактным ударным ядром требует обеспечения высокой точности измерения координат, скорости и направления движения АБ и управляемой ракеты для решения задачи о точке встречи ракеты с целью, в то же время применение поворотной платформы для электромеханического управления диаграммами направленности всех четырех антенн вносит большие погрешности в результаты измерения угловых координат как цели, так и управляемой ракеты;
применение поворотной платформы требует больших затрат времени при переходе с сопровождения одной цели на другую, что снижает пропускную способность системы активной защиты и не позволяет обеспечить необходимую эффективность ее боевого применения в условиях ведения противником интенсивного огня со всех направлений по отношению к защищаемому объекту, а также ограничивает возможности по применению реализованной по данному способу системы для активной защиты подвижных объектов.
Известный способ [13] позволяет избавиться от электромеханического управления диаграммами направленности антенн и состоит в следующем. Облучают атакующие боеприпасы (АБ), угрожающие защищаемому объекту со стороны его боковых поверхностей, электромагнитной энергией дециметрового диапазона волн с четырех приемно-передающих антенн (ППА1, ППА2, ППА3, ППА4), в качестве которых применяют располагаемые на неподвижной плоской горизонтальной платформе на окружности на равном удалении по дуге окружности друг от друга с базовыми L расстояниями между диаметрально противоположными ППА1 и ППА2, а также ППА 3 и ППА4 вертикальные несимметричные электрические вибраторы с круговой диаграммой направленности в горизонтальной плоскости и с диаграммой направленности в вертикальной плоскости, согласованной с диапазоном возможных значений углов места приближающихся к защищаемому объекту АБ. которые излучают в пространство четыре непрерывных зондирующих сигнала с частотной модуляцией по одностороннему пилообразно линейно спадающему закону НЛЧМ1, НЛЧМ2, НЛЧМ3 и НЛЧМ4 с близкими несущими частотами ƒ1, ƒ2, ƒ3 и ƒ4 с одинаковыми частотой модуляции Fm и девиацией частоты dƒm, при этом облучают электромагнитной энергией дециметрового диапазона длин волн все АБ, угрожающие защищаемому объекту со стороны его боковых поверхностей, излучаемой четырьмя антеннами ППА1, ППА2, ППА3 и ППА, по отраженным от каждого АБ сигналам измеряют текущие расстояния R1, R2, R3 и R4 соответственно от антенн ППА1, ППА2, ППА3 и ППА4 до каждого АБ, по соотношению между результатами измерений R1, R2, R3 и R4 вычисляют текущие значения декартовых, а затем сферических координат АБ.
При измерении текущих координат АБ осуществляют автосопровождение параллельно всех обнаруженных АБ на основе разделения во времени цифровых каналов обработки информации РЛС системы активной защиты объекта, при этом число цифровых каналов N должно быть не меньше ожидаемого числа одновременно сопровождаемых целей M, т.е. N≥M, в процессе сопровождения каждого АБ осуществляют экстраполяцию их траекторий для определения координат точек их пересечения с внешней поверхностью защищаемого объекта, по результатам которых назначают к задействованию защитные боеприпасы, ближайшие к указанным точкам пересечения, и по достижении АБ минимального допустимого расстояния до внешней поверхности защищаемого объекта формируют команду на задействование соответствующего защитного боеприпаса по измеренным в данный момент времени их угловым координатам.
Одновременно все АБ облучают электромагнитной энергией, излучаемой дополнительно введенными в состав системы активной защиты объекта приемно-передающими антеннами ППА5, ППА6, ППА7 и ППА8, которые устанавливают на той же платформе и на той же окружности в интервалах между антеннами ППА1, ППА2, ППА3 и ППА4 и которые представляют собой открытые концы волноводов, оси главных лепестков диаграмм направленности которых перпендикулярны плоскости антенной платформы перекрывают сектор ожидаемых направлений приближения АБ к верхней поверхности защищаемого объекта, которые излучают в пространство зондирующие НЛЧМ5, НЛЧМ6, НЛЧМ7 и НЛЧМ8 сигналы на близких частотах сантиметрового диапазона длин волн ƒ5, ƒ6, ƒ7 и ƒ8 с одинаковыми частотой модуляции Fm1 и девиацией частоты dƒm1, по результатам обработки принятых отраженных от АБ сигналов определяют текущие расстояния до целей R5, R6, R7 и R8 соответственно от антенн ППА5, ППА6, ППА7 и ППА8, с учетом которых вычисляют текущие координаты сопровождаемых АБ.
Основной недостаток способа [13] состоит в сложности его технической реализации, что определяется наличием двух гомодинных радиолокаторов (дециметрового и сантиметрового диапазонов длин волн), каждый из которых содержит по четыре приемно-передающих блока со своими антеннами, а также в сложности обработки радиолокационной информации.
В соответствии с изложенным цели изобретения состоят в следующем:
упрощение технической реализации способа-прототипа за счет уменьшения количества антенн и устройств обработки;
уменьшение массогабаритных характеристик аппаратуры и расширение области применения за счет обеспечения возможности его использования на подвижных объектах с ограниченной грузоподъемностью.
Технический результат изобретения состоит в упрощении его технической реализации, уменьшении массогабаритных характеристик аппаратуры и расширении области применения.
Указанные цели достигаются путем облучении АБ электромагнитной энергией с четырех приемно-передающих антенн (ППА1, ППА2, ППА3, ППА4), которые устанавливают на неподвижной плоской горизонтальной платформе по окружности на равном удалении по дуге окружности друг от друга с базовыми L, расстояниями между диаметрально противоположными ППА1 и ППА2, а также ППА3 и ППА4, которые излучают в пространство четыре непрерывных зондирующих сигнала с частотной модуляцией по одностороннему пилообразно линейно спадающему закону НЛЧМ1, НЛЧМ3, НЛЧМ3 и НЛЧМ4 с близкими несущими частотами ƒ1, ƒ2, ƒ3 и ƒ4 одинаковыми частотой модуляции Fm и девиацией частоты dƒm, облучают электромагнитной энергией все АБ, угрожающие защищаемому объекту с любого направления, по отраженным от каждого АБ сигналам измеряют текущие расстояния R1, R2, R3 и R4 соответственно от антенн ППА1, ППА2, ППА3 и ППА4 до каждого АБ. Отличие от прототипа состоит в том, что в качестве антенн ППА1, ППА2, ППА3 и ППА4 применяют излучатели, размещенные над плоским отражающим экраном с размерами 10λ×10λ и имеющие диаграммы направленности в форме полусферы в пределах 360 градусов по азимуту и от нуля до 90 градусов по углу места, по измеренным значениям расстояний R1, R2, R3 и R4, с учетом известных значений координат излучателей
x1=-1 м, y1=0;
x2=1 м, y2=0;
x3=0, y3=-1 м;
x4=0, y4=1 м,
составляют систему уравнений
путем решения которой определяют текущие значения декартовых (x0, y0, z0), а затем сферических (R0, α0, ε0) координат сопровождаемых АБ.
Таким образом, предлагаемый способ характеризуется следующими отличительными признаками по сравнению с прототипом:
в качестве антенн ППА1, ППА2, ППА3 и ППА4 применяют излучатели, размещенные над плоским отражающим экраном с размерами 10λ×10λ и имеющие диаграммы направленности в форме полусферы в пределах 360 градусов по азимуту и от нуля до 90 градусов по углу места;
по измеренным значениям расстояний R1, R2, R3 и R4, с учетом известных значений координат излучателей
x1=-1 м, y1=0;
x2=1 м, y2=0;
x3=0, y3=-1 м;
x4=0, y4=1 м,
составляют систему уравнений
путем решения которой определяют текущие значения декартовых (x0, y0, x0) а затем сферических (R0, α0, ε0) координат сопровождаемых АБ.
Выполнение указанных операций позволяет обеспечить упрощение технической реализации способа-прототипа за счет уменьшения количества антенн и устройств обработки, уменьшение массогабаритных характеристик аппаратуры и расширение области применения за счет обеспечения возможности его использования на подвижных объектах с ограниченной грузоподъемностью.
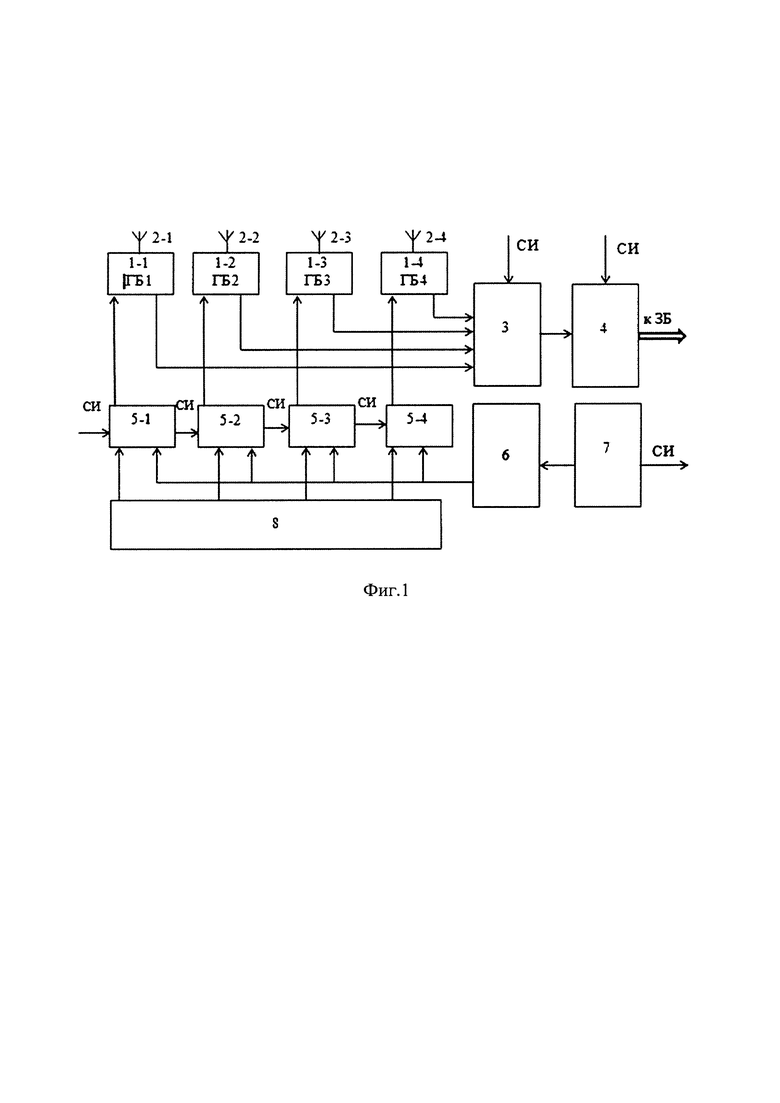
Вариант структурной схемы устройства, реализующего предлагаемый способ активной защиты объектов от поражения атакующими боеприпасами, поступающими со всех направлений по азимуту и углу места в сторону защищаемого объекта, представляет собой четырехчастотный гомодинный радиолокатор, основу которого составляют четыре гомодинных приемно-передающих блока (ППБ) с антеннами, диаграммы направленности которых представляют собой полусферу. Структурная схема такого устройства приведена на фиг. 1.
В состав структурной схемы системы активной защиты объекта от атакующих боеприпасов (фиг. 1) входят: гомодинные приемно-передающие блоки 1-1, 1-2, 1-3, 1-4; антенны гомодинных блоков 2-1, 2-2, 2-3, 2-4; блок 3 первичной обработки радиолокационной информации, блок 4 вторичной обработки радиолокационной информации, цифро-аналоговые преобразователи (ЦАП) 5-1, 5-2, 5-3, 5-4, цифровой формирователь 6 непрерывного зондирующего линейно-частотно-модулированного (ЛЧМ) сигнала, синхронизатор 7, синтезатор частот 8.
Устройство работает следующим образом. Блок 6 синтезирует непрерывный цифровой ЛЧМ-сигнал, который поступает на первые входы ЦАП 5-1, 5-2, 5-3, 5-4, на вторые входы которых поступают с выхода синтезатора частот 8 гармонические сигналы с частотами ƒ01, ƒ02, ƒ03 и ƒ04. В результате цифровые ЛЧМ-сигналы преобразуются в аналоговые с указанными выше центральными частотами, с периодом частотной модуляции Тт и девиацией частоты dƒm. Эти сигналы поступают на входы передающих каналов гомодинных блоков и излучаются антеннами 2-1, 2-2, 2-3, 2-4 во все стороны в соответствии с полусферической формой их диаграмм направленности. Отраженные от объектов (АБ) сигналы принимаются теми же антеннами 2-1, 2-2, 2-3, 2-4 и поступают на входы приемных каналов соответствующих гомодинных блоков 1-1, 1-2, 1-3, 1-4, где после соответствующих преобразований формируются сигналы биений, спектры которых несут информацию о расстояниях Ri (i=1, 2, 3, 4) от излучателя i-й антенны до отражающих объектов. В соответствии с критериями, описанными ниже выражениями (12) и (13), в блоке 3 первичной обработки радиолокационной информации осуществляется привязка полученных результатов от разных гомодинных блоков к одному отражающему объекту.
Результаты первичной обработки информации поступают на вход блока 4 вторичной обработки, который представляет собой многоканальный цифровой процессор, число каналов которого должно быть не менее ожидаемого числа одновременно сопровождаемых атакующих боеприпасов. В каждом канале блока 4 по цифровым отсчетам текущих координат объектов осуществляется одновременное сопровождение всех обнаруженных траекторий в соответствии с принципами [17]. На основе экстраполяции сопровождаемых траекторий осуществляется оценка координат точки встречи сопровождаемого АБ с поверхностью защищаемого объекта, по которым назначается к задействованию конкретный ЗБ. По достижении АБ минимально допустимого расстояния до поверхности защищаемого объекта формируется команда на задействование назначенного ЗБ, которая поступает от многоканального выхода блока 4 на назначенный ЗБ и инициирует его подрыв.
По предлагаемому способу выполняют следующие операции.
Каждым гомодинным блоком 1-1, 1-2, 1-3, 1-4 формируют непрерывные зондирующие ЛЧМ-сигналы на близких частотах ƒ1, ƒ2, ƒ3, ƒ4 с разносом по частоте для исключения взаимных помех. Облучают все АБ, угрожающие защищаемому объекту, электромагнитной энергией, Излучаемой четырьмя приемно-передающими антеннами 2-1, 2-2, 2-3, 2-4, в качестве которых применены установленные на плоской неподвижной платформе на равном расстоянии по окружности друг от друга с базовыми расстояниями L между диаметрально противоположными антеннами 2-1 и 2-2, а также 2-3 и 2-4, упомянутые ранее излучатели с полусферической диаграммой направленности, которые излучают в пространство четыре непрерывных зондирующих сигнала с частотной модуляцией по одностороннему пилообразно линейно спадающему закону НЛЧМ1, НЛЧМ2, НЛЧМ3 и НЛЧМ4 с близкими несущими частотами ƒ1, ƒ2, ƒ3, ƒ4, с одинаковой частотой модуляции Fm и девиацией частоты dƒm.
По отраженным от каждого АБ сигналам измеряют текущие расстояния R1, R2 R3 и R4 соответственно от приемопередающих антенн 2-1, 2-2, 2-3 и 2-4 до каждого АБ.
По измеренные расстояниям и искомым координатам цели x0, y0, z0 при известных координатах каждого излучателя x1, y1; х2, у2; х3, y3; х4, у4 составляют систему уравнений
Первый и второй излучатели (2-1 и 2-2) расположены на пересечениях координатной оси 0х с окружностью L радиуса Re=2 м, поэтому их координаты равны:

Аналогично 3-й и 4-й излучатели (2-3 и 2-4) расположены на пересечениях координатных осей 0y с той же окружностью L, поэтому их координаты:

С учетом значений координат излучателей (2) и (3) система уравнений (1) примет вид
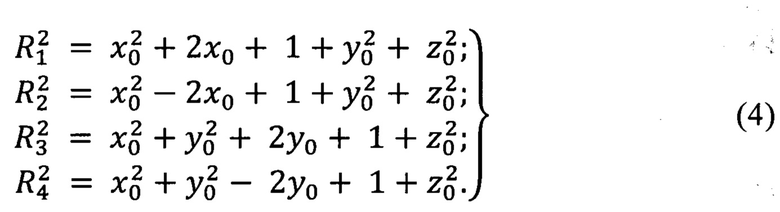
Сложив первое уравнение системы (4) со вторым, получают

Аналогично сложение третьего и четвертого уравнений системы (4) дает

Сравнивая результаты (5) и (6), замечают, что

Выполнение равенства (7) позволяет сделать вывод о том, что результаты измерения расстояний R1, R2, R3, R4, полученные гомодинными блоками 1-1, 1-2, 1-3, 1-4 относятся к одному обнаруженному или сопровождаемому объектам.
Кроме условия (7) признаком принадлежности измеренных расстояний R1, R2, R3 и R4 одному обнаруженному объекту может быть принято условие: разность расстояний |R1-R2| и |R3-R4| по модулю не превышают значение диаметра окружности L, на которой размещены все 4 излучателя.
В соответствии с принятым значением L=2 м принятое условие может быть записано в виде

Для определения координаты х0 вычитают второе уравнение системы (4) из первого, получаем

Аналогично, в результате вычитания четвертого уравнения из третьего получают значение координаты

Подставив полученные значения координат x0 и y0 в любое уравнение системы (4), например, в первое, и решив относительно z0, получают

Наклонная дальность цели определяется соотношением
а угол места и

Азимут цели в зависимости от соотношения между координатами x0 и y0 определяется следующими формулами:
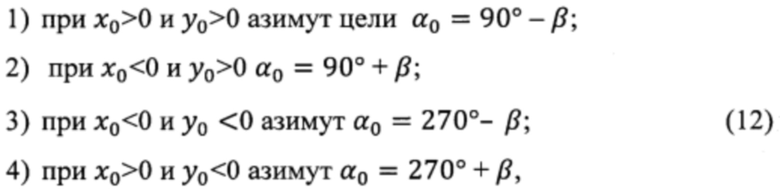
где угол β определяется соотношением

Таким образом, по результатам первичной обработки радиолокационной информации, содержащей измеренные каждым гомодинным блоком значения расстояний от i-го излучателя до одной обнаруженной цели, определяются декартовы (x0, y0, z0) и сферические координаты (α0, ε0, R0) цели (АБ). Результаты первичной обработки поступают на вход блока вторичной обработки радиолокационной информации, в задачу которой входят выполнение следующих операций:
- сопровождение и экстраполяция траекторий обнаруженных целей (атакующих боеприпасов);
- оценка координат точки встречи сопровождаемого боеприпаса с поверхностью защищаемого объекта, по которым назначается к задействованию конкретный защитный боеприпас;
- формирование команды на пуск назначенного защитного боеприпаса в момент достижения атакующим боеприпасом минимально допустимого расстояния до поверхности защищаемого объекта.
В качестве приемопередающих антенн 2-1, 2-2, 2-3 и 2-4 могут быть использованы излучатели, размещенные над плоским отражающим экраном с размерами 10λ×10λ и имеющие диаграммы направленности в форме полусферы в пределах 360 градусов по азимуту и от нуля до 90 градусов по углу места, описанные в работах [14-16].
Отличия предлагаемого способа активной защиты объектов от атакующих боеприпасов от прототипа являются существенными, так как они позволяют обеспечить упрощение технической реализации способа-прототипа за счет уменьшения количества антенн и устройств обработки, уменьшение массогабаритных характеристик аппаратуры и расширение области применения за счет обеспечения возможности его использования на подвижных объектах с ограниченной грузоподъемностью.
Источники информации
1. Патент РФ №2374597, F41H 11/02, 27.11.2009. Способ формирования команды на пуск защитного боеприпаса.
2. Васильев А. Системы активной защиты бронетехники // Военное обозрение, 12.08.2013, URL: http://topwar.ru/31710 - sistemy - aktivnoy - zaschity - bronetehnik (дата обращения 12.09.2022).
3. Патент РФ №2471139, F41H 11/02, 27.12.2012. Радиолокационная станция формирования команды на пуск защитного боеприпаса.
4. Патент РФ №2472101, F41H 11/02, 10.01.2013. Способ формирования команды на защиту объекта от приближающейся к нему цели.
5. Неупокоев Ф.К. Стрельба зенитными ракетами. - Воениздат. - 1991. - с. 173-174.
6. Патент Р.Ф №2334193, F42C 13/00, 20.09.2008. Способ согласования момента срабатывания неконтактного датчика цели.
7. Патент РФ №2471139, F41H 11/02, 27.12.2012. РЛС формирования команды на пуск защитного боеприпаса.
8. Патент РФ №2479820, F41H 11/02, 20.04.2013. Способ определения промаха снаряда в защищаемый объект и устройство для его реализации.
9. Патент РФ №2523031, F41H 11/02, Способ определения защитного боеприпаса, подлежащего пуску.
10. Пафиков Е.А. и др. Способ защиты объектов бронетанковой техники… Патент РФ №2651319, F41H 9/06, 19.04.2018.
11. Ардашев А. Защита шахтных пусковых установок МБР от высокоточного оружия // Техника и вооружение . - №4. - 2004. - с. 31-34.
12. Патент РФ №2560259, G01S 13/34, F41G 7/00. 20.08.2015. Способ наведения оружия и ракеты на цель и устройство для его реализации.
13. Патент РФ №2792312, G01S 13/34, F41G 7/00, 21.03.2023. Способ целеуказания для системы активной защиты от атакующих боеприпасов.
14. Патент на полезную модель №155921, H01Q 9/16. Широкополосный излучатель для фазированных антенных решеток с широкоугольным сканированием. 20.10.2015, Бюл. №29.
15. Овчинникова Е.В., Шумилов Т.Ю., Е Тхунт Кхаунг. Антенная решетка из широкополосных излучателей типа «бабочка» // Вопросы электромеханики. Труды ВНИИЭМ, 2019, №5, с. 25-30.
16. Бохин Д.Л. Исследование характеристик широкополосных излучателей с диаграммой направленности, близкой к полу сфере // Антенны, 2014, Вып. 2, с. 34-37.
17. Шишов Ю.А., Ворошилов В.А. Многоканальная радиолокация с временным разделением каналов. - М.: Радио и связь, 1987. - 144 с.
Изобретение относится к способу активной защиты объектов от атакующих боеприпасов (АБ). Для активной защиты объектов облучают все АБ, угрожающие объекту электромагнитной энергией с четырех приемо-передающих антенн, установленных на горизонтальной платформе по окружности на равном удалении друг от друга по дуге окружности и имеющие диаграммы направленности в форме полусферы в пределах 360 градусов по азимуту и от нуля до 90 градусов по углу места. Облучение проводят зондирующими сигналами с частотной модуляцией по одностороннему пилообразно линейно спадающему закону с определенными несущими частотами и параметрами. По отраженным от каждого АБ сигналам измеряют расстояния от антенн до каждого АБ определенным образом. Осуществляют привязку полученных результатов от разных антенн к одному АБ. Производят обработку полученной информации по каждому из сопровождающих АБ с помощью многоканального процессора. Вычисляют оценку координат точки встречи АБ с поверхностью защищаемого объекта. При достижении минимально допустимого расстояния формируют команду на задействование защитного боеприпаса и его подрыв. Обеспечивается уменьшение массогабаритных характеристик аппаратуры и расширение области применения, в том числе на подвижных объектах. 1 ил.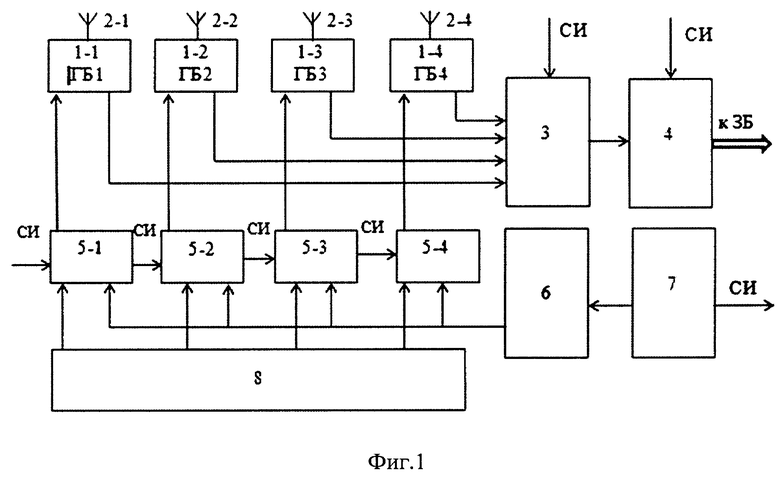
Способ активной защиты объектов от атакующих боеприпасов (АБ), при котором используют четыре гомодинных приемо-передающих блока (1-1, 1-2, 1-3, 1-4) с приемопередающими антеннами (2-1, 2-2, 2-3, 2-4), в качестве которых применены установленные на плоской неподвижной платформе на равном расстоянии по окружности друг от друга с базовыми расстояниями L между диаметрально противоположными антеннами 2-1 и 2-2, а также 2-3 и 2-4 излучатели с полусферической диаграммой направленности, блок первичной обработки радиолокационной информации (3), блок вторичной обработки радиолокационной информации (4), четыре цифроаналоговых преобразователя, (ЦАП) (5-1, 5-2, 5-3, 5-4), цифровой формирователь непрерывного зондирующего линейно-частотно-модулированного (ЛЧМ) сигнала (6), синхронизатор (7), синтезатор частот (8) и заключающийся в том, что:
- блок (6) синтезирует непрерывный цифровой ЛЧМ-сигнал, который поступает на первые входы ЦАП (5-1, 5-2, 5-3, 5-4), на вторые входы которых поступают с выхода синтезатора частот (8) гармонические сигналы с частотами ƒ01, ƒ02, ƒ03 и ƒ04;
- полученные на выходе ЦАП аналоговые сигналы поступают на входы передающих каналов соответствующих гомодинных блоков, на выходе которых формируют четыре непрерывных зондирующих сигнала с частотной модуляцией по одностороннему пилообразно линейно спадающему закону НЛЧМ1, НЛЧМ2, НЛЧМЗ и НЛЧМ4 с близкими несущими частотами ƒ1, ƒ2, ƒ3 и ƒ4, с одинаковой частотой модуляции Fm и девиацией частоты dƒm;
- по отраженным от каждого АБ сигналам измеряют текущие расстояния R1, R2, RЗ и R4 соответственно от приемопередающих антенн 2-1, 2-2, 2-3 и 2-4 до каждого АБ;
- в результате первичной обработки, которой в блоке (3) осуществляется привязка к одному отражающему объекту;
- далее результаты первичной обработки информации поступают на вход блока (4) для вторичной обработки, который представляет собой многоканальный цифровой процессор, число каналов которого должно быть не менее ожидаемого числа одновременно сопровождаемых атакующих боеприпасов;
- на основе экстраполяции сопровождаемых траекторий осуществляется оценка координат точки встречи сопровождаемого АБ с поверхностью защищаемого объекта, по которым назначается к задействованию конкретный защитный боеприпас (ЗБ);
- по достижении АБ минимально допустимого расстояния до поверхности защищаемого объекта формируется команда на задействование назначенного ЗБ, которая поступает от многоканального выхода блока (4) на назначенный ЗБ и инициирует его подрыв.
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ДЛЯ СИСТЕМЫ АКТИВНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ АТАКУЮЩИХ БОЕПРИПАСОВ | 2022 |
|
RU2792312C1 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2493532C2 |
| Способ изготовления приемного слоя позитивной бумаги для скоростного копирования штриховых оригиналов фотографическим методом | 1957 |
|
SU118045A1 |
| КРИСТАЛЛИЗАТОР ДЛЯ НЕПРЕРЫВНОГО ЛИТЬЯ ЗАГОТОВКИ | 2019 |
|
RU2712683C1 |
| US 3955292 A1, 11.05.1976 | |||
| Система охлаждения аппаратуры | 1973 |
|
SU473414A2 |
