Изобретение относится к области атомной энергетики, в частности к атомной энергетической станции с реакторами корпусного типа, и касается центрирования датчика положения относительно штанги привода во время сборки реактора.
Известен привод регулирующего органа водо-водяных энергетических реакторов, далее ВВЭР, серии ВВЭР-1000, привод СУЗ ШЭМ-3. В.П. Никитюк, А.Г. Казахмедов, А.С. Ваулин, И.Т. Ершов, В.П. Денисов. Приводы СУЗ реакторов ВВЭР для атомных станций. М.: ИКЦ «Академкнига», 2004. стр. 121-127.
Привод регулирующего органа ядерного реактора, содержит датчик положения, блок перемещения, штангу.
Недостатком данного привода регулирующего органа является невозможность использования для дистанционного центрирования датчиков положения со штангами приводов, в результате чего центрирование осуществляется отдельно для каждого привода.
Задачей изобретения является обеспечение дистанционного центрирования датчика положения в штанге привода регулирующего органа при сборке реактора. При данном дистанционном центрировании достигается сокращение времени планово-предупредительного ремонта и уменьшение дозозатрат. Существующая конструкция привода регулирующего органа и технология разборки-сборки реактора требует демонтажа датчика положения при разборке реактора и монтажа его при сборке реактора, на что тратится значительное время (более 1 суток на критическом пути планово-предупредительного ремонта).
Техническим результат изобретения позволяет отказаться от демонтажа датчика положения с верхнего бока при разборке реактора и монтажа датчика положения на верхнем блоке при сборке реактора при выполнении планово-предупредительного ремонта реакторной установки.
Технический результат достигается тем, что в приводе регулирующего органа ядерного реактора, содержащем датчик положения, блок перемещения, штангу, предлагается телескопическое центрирующее устройство устанавливать на блок перемещения. Телескопическое центрирующее устройство после обеспечения центрирования штанги совместно с датчиком положения телескопически задвигается вдоль блока перемещения по направляющему пазу. Для удержания телескопического центрирующего устройства и исключения его падения используется фиксирующий элемент, который закрепляет трубу на блоке перемещения за направляющий паз. Для лучшего удержания предлагается предусмотреть дополнительные пазы. Для контроля центрирования датчика положения по штанге предлагается предусмотреть отверстия в трубе. Для фиксации телескопического центрирующего устройства на определенном расстоянии, для исключения выхода наконечника датчика положения из центрирующего устройства и создания усилия предлагается использовать упругие элементы.
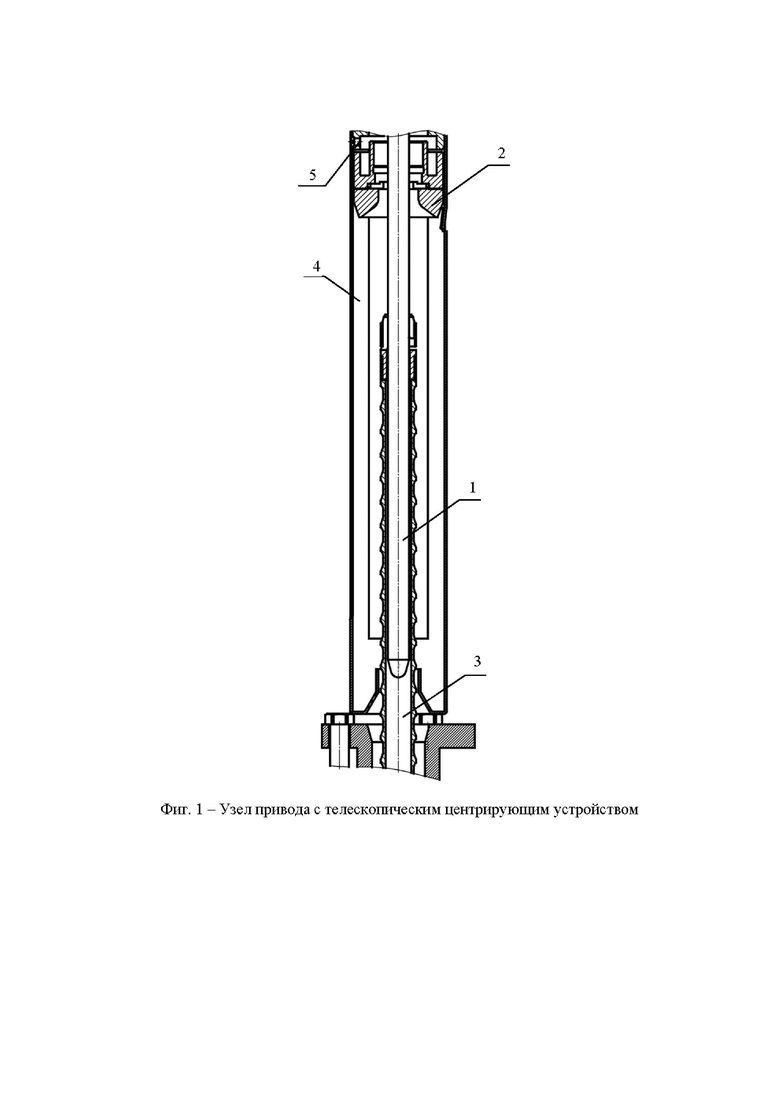
Сущность изобретения поясняется рисунками, где на фиг. 1 показан узел привода с телескопическим центрирующим устройством, а на фиг. 2 показан вид телескопического центрирующего устройства.
Краткое описание чертежей (если они содержатся в заявке)
На фиг. 1 представлен узел привода с телескопическим центрирующим устройством в момент центрирования, где:
1 - датчик положения
2 - блок перемещения
3 - штанга
4 - телескопическое центрирующее устройство
5 - фиксирующий элемент
На фиг. 2 представлено телескопическое центрирующее устройство, где:
6 - труба
7 - направляющий паз
8 - центрирующий конус
9 - отверстие
10 - упругий элемент
Привод регулирующего органа ядерного реактора содержит датчик положения 1, блок перемещения 2, штангу 3, выполненный с телескопическим центрирующим устройством 4, закрепленной на фиксирующий элементе 5 к блоку перемещения 2.
Телескопическое центрирующее устройство состоит из телескопической трубы 6 с вдоль расположенным направляющим пазом 7, на конце которой находится центрирующий конус 8. Также на трубе может быть выполнен дополнительный направляющий паз. Для контроля центрирования может быть выполнено отверстие 9. Для создания усилия и фиксации на определенном расстоянии может быть выполнен упругий элемент 10.
Телескопическое центрирующее устройство 4 устанавливается на блок перемещения привода 2 и закрепляется фиксирующим элементом 5 за направляющий паз 7. Труба скользит вдоль паза 7. Штанга привода регулирующего органа 3 центрируется при движении вниз блока верхнего с помощью центрирующего конуса 8, после чего штанга привода регулирующего органа 3 и датчик положения 1 становятся соосными. При дальнейшем опускании верхнего блока и соответственно блоков перемещения регулирующего органа 2 центрирующее устройство 4, упрется и телескопически поднимется вдоль блока перемещения штанги привода 2 и на дальнейшую работу реактора воздействия оказывать не будет. Для контроля входа и соосности штанги привода 3 могут использоваться отверстия, выполненные на телескопическом центрирующем устройстве 4 для контроля центрирования 9. Для удержания телескопического устройства 4 в определенном положении и создания усилия для точного центрирования может использоваться упругий элемент 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод регулирующего органа ядерного реактора | 2023 |
|
RU2811134C1 |
| Способ сборки/разборки реактора | 2023 |
|
RU2825142C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2217820C1 |
| ПРИВОД УПРАВЛЕНИЯ ЯДЕРНЫМ РЕАКТОРОМ | 2014 |
|
RU2563890C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2187157C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК | 2012 |
|
RU2474892C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2005 |
|
RU2308776C2 |
| Телескопическая грузоподъемная штанга | 2018 |
|
RU2669197C1 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ УПАВШИХ ПРЕДМЕТОВ ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2637498C1 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТОПЛИВНЫХ СБОРОК ВОДО-ВОДЯНОГО РЕАКТОРА ПРИ ЕГО ПЕРЕГРУЗКЕ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2017 |
|
RU2669015C1 |

Изобретение относится к области атомной энергетики, в частности к атомной энергетической станции с реакторами корпусного типа, и касается центрирования датчика положения относительно штанги привода. Технический результат: обеспечение дистанционного центрирования датчика положения в штанге привода регулирующего органа при сборке реактора. При данном центрировании достигается сокращение времени планово-предупредительного ремонта и уменьшение дозозатрат. В приводе регулирующего органа ядерного реактора, содержащем датчик положения, блок перемещения, штангу, предлагается телескопическое центрирующее устройство устанавливать на блок перемещения. Телескопическое центрирующее устройство после обеспечения центрирования штанги совместно с датчиком положения телескопически задвигается вдоль блока перемещения по направляющему пазу. Для удержания телескопического центрирующего устройства и исключения его падения используется фиксирующий элемент, который закрепляет трубу на блоке перемещения за направляющий паз. Для контроля центрирования датчика положения по штанге выполнены отверстия в трубе. Для фиксации телескопического центрирующего устройства на определенном расстоянии, для исключения выхода наконечника датчика положения из центрирующего устройства и создания усилия используются упругие элементы. 3 з.п. ф-лы, 2 ил.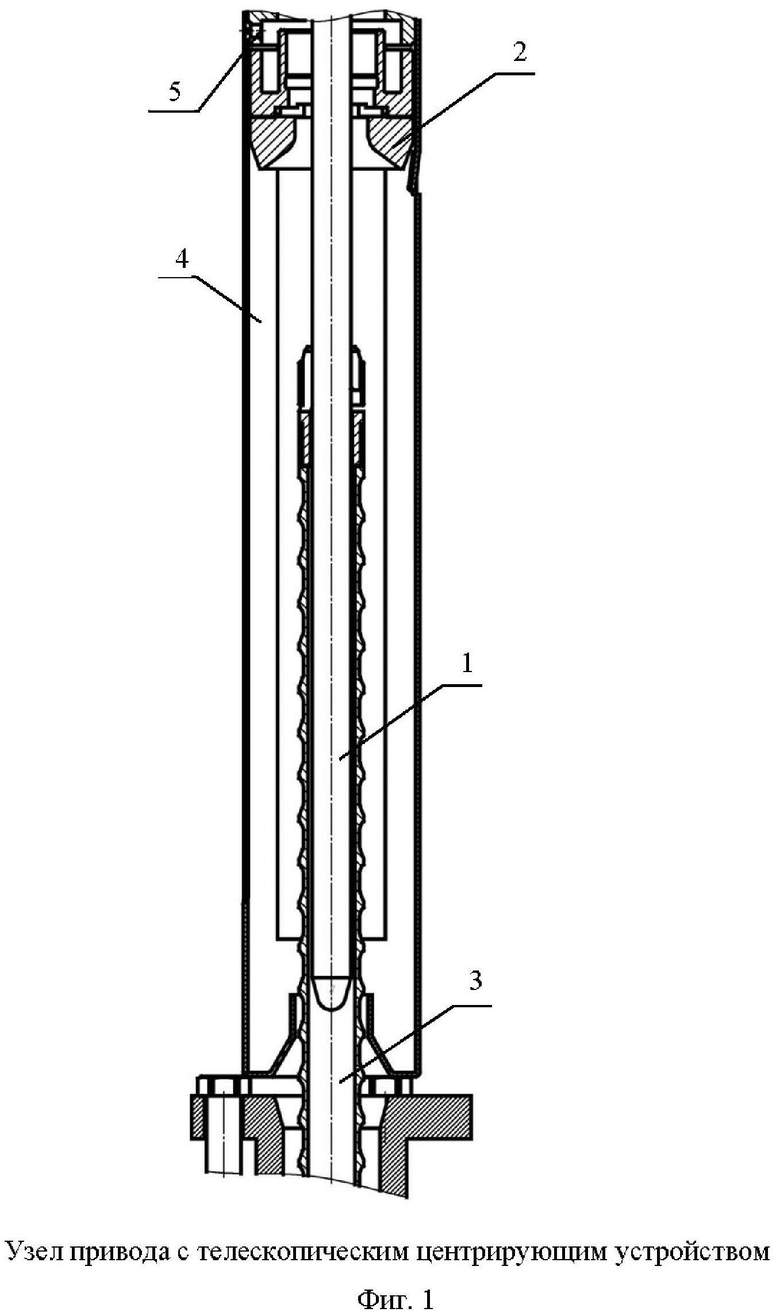
1. Привод регулирующего органа ядерного реактора, содержащий датчик положения, блок перемещения, штангу, отличающийся тем, что на блоке перемещения закреплено с помощью фиксирующего элемента телескопическое центрирующее устройство, состоящее из трубы с вдоль расположенным направляющим пазом, на конце трубы находится центрирующий конус для датчика положения, для обеспечения соосности и входа датчика положения со штангой привода.
2. Привод по п.1, отличающийся тем, что на телескопическом центрирующем устройстве выполнен как минимум один дополнительный паз.
3. Привод по п.1, отличающийся тем, что на телескопическом центрирующем устройстве выполнено как минимум одно отверстие для контроля центрирования.
4. Привод по п.1, отличающийся тем, что на телескопическом центрирующем устройстве выполнен как минимум один упругий элемент для фиксации.
| РЕГУЛИРУЮЩИЙ ОРГАН УРАН-ГРАФИТОВОГО КАНАЛЬНОГО ЯДЕРНОГО РЕАКТОРА | 2001 |
|
RU2188470C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2000 |
|
RU2187157C2 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2005 |
|
RU2308776C2 |
| GB 898895 A, 14.06.1962 | |||
| CN 102956274 B, 29.06.2016 | |||
| Устройство для программного управления намоточным оборудованием | 1983 |
|
SU1160366A1 |

