Изобретение относится к устройствам для аэродинамических испытаний, а именно к приборам, на которых осуществляется круговое движение исследуемого тела.
Известен способ определения аэродинамических характеристик объекта, заключающийся в измерении действующих на него сил с помощью весов при его круговом движении [1].
Известна ротативная машина для определения аэродинамических характеристик объекта, представляющая собой вращающийся уравновешенный брус, на одном из концов которого укреплен исследуемый объект. Привод ротора машины осуществляется от электродвигателя [2].
Недостатками этих способа и устройства являются сложность определения коэффициентов аэродинамического (лобового) сопротивления исследуемых твердых тел, вследствие неизбежной закрутки воздушной среды вращающимся ротором. Большие погрешности измерения истинной относительной скорости воздушного потока давали большие погрешности и в определении коэффициентов аэродинамического сопротивления.
Известен способ определения аэродинамического сопротивления испытуемого объекта путем его сравнения с аэродинамическим сопротивлением эталонных тел при их вращательном движении на дифференциальной аэродинамической ротативной машине [3].
В качестве эталонных используются тела, характеристики которых в исследуемом диапазоне чисел Рейнольдса остаются постоянными или изменяются незначительно, например, плоская пластинка под различными углами атаки.
Использование метода сравнения с эталонными телами полностью устранило недостатки предыдущих устройств, связанные с закруткой воздушного потока и большими погрешностями определения скоростей.
Недостатком дифференциальной аэродинамической ротативной машины, взятой за прототип, является большая конструктивная сложность, особенно ее дифференциального узла. Любая неточность изготовления его деталей существенно влияет на точность измерений. Именно это обстоятельство препятствует широкому тиражированию данной машины для проведения экспериментальных исследований.
Технической задачей изобретения является повышение точности и доступности определения коэффициентов аэродинамического сопротивления исследуемых тел.
Технический результат заявляемого изобретения выражается в повышении точности определения коэффициентов сопротивления испытуемых аэродинамических тел с одновременным снижением конструктивной сложности и стоимости изготовления предлагаемой ротативной машины.
Технический результат изобретения достигается использованием нового для ротативных машин способа измерения аэродинамических сил, действующих как на исследуемый объект, так и на эталонное тело при их круговом движении, путем сравнения аэродинамических сил, действующих на исследуемый объект, с аэродинамическими силами, действующими на эталонное тело.
Известно, что упругая деформация балки под воздействием внешней силы прямо пропорциональна величине приложенной силы. При наличии двух одинаковых балок с жестко защемленным одним концом и сосредоточенной силой, приложенной на втором, величина их упругой деформации будет иметь одно и то же значение только в том случае, когда будут равными по величине и направлению приложенные силы. В рассматриваемой ротативной машине при вращательном движении ее ротора одна сила создается испытуемым аэродинамическим телом, вторая - эталонным телом. Равенство деформаций балок соответствует равенству сил, приложенных к их свободному концу. Коэффициент аэродинамического сопротивления эталонного тела и его геометрия заранее известны, что позволяет определить значение коэффициента лобового сопротивления испытуемого тела после вычисления его максимальной площади поперечного сечения. При этом скорость движения тел существенного влияния на точность измерений не оказывает. Она лишь определяет числа Рейнольдса, при которых проводятся испытания.
Заявленный способ для определения коэффициентов лобового сопротивления реализуется на ротативной аэродинамической машине, содержащей раму, электродвигатель, привод, вал и вращающуюся упругую балку с узлом крепления испытуемого аэродинамического тела с приводом на одном конце и эталонного тела - на другом.
В отличие от известных технических решений и прототипа в заявленной аэродинамической ротативной машине сравнение сил, действующих на испытуемый объект и эталонное тело, осуществляется сравнением величин деформаций их несущих упругих балок.
Величины деформаций балок оцениваются величинами смещения лучей лазерных указок, закрепленных по концам упругих балок, на шкалу отклонений, закрепленной на оси вращения перпендикулярно вращающимся балкам. Считывание показаний с вращающейся шкалы осуществляется при помощи стробоскопического эффекта.
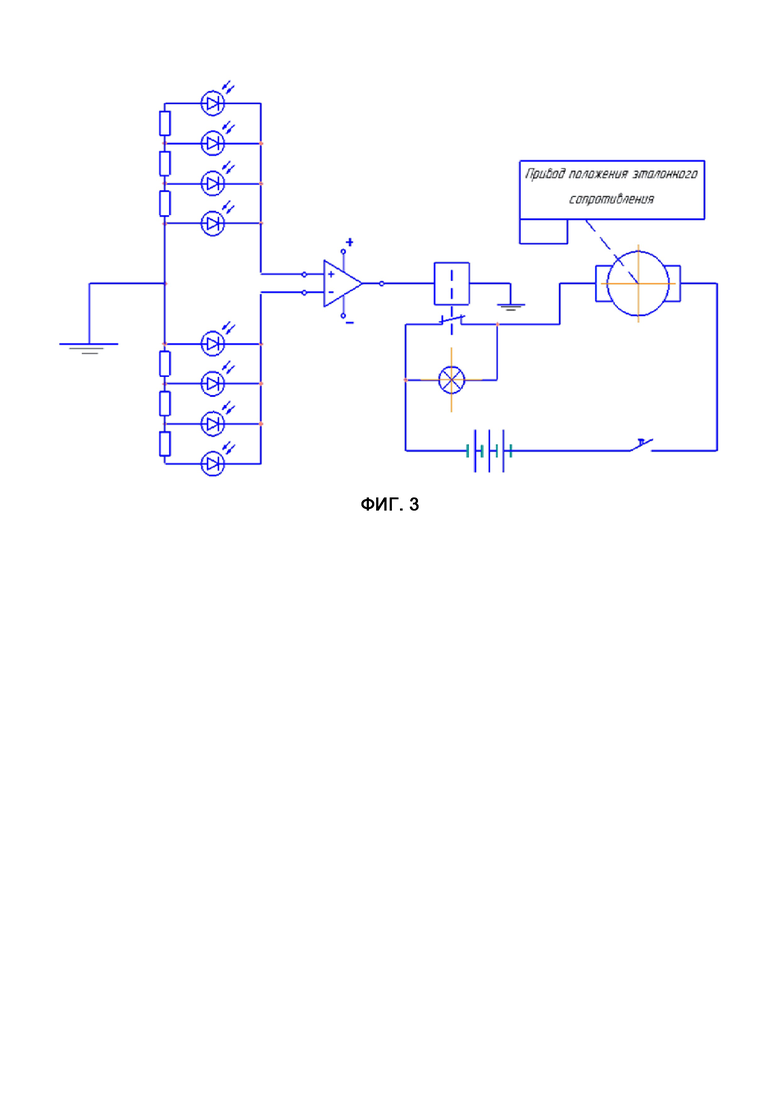
Управление положением эталонного тела в процессе вращательного движения ротора, остановка привода и ротора машины по пункту 2 формулы изобретения осуществляется автоматически при достижении деформации упругой балки с эталонным телом значения деформации упругой балки с испытуемым телом. Считывание сигналов со шкал и преобразование их в управляющий сигнал для привода осуществляется посредством светодиодов, установленных на этих шкалах, и электронного усилителя.
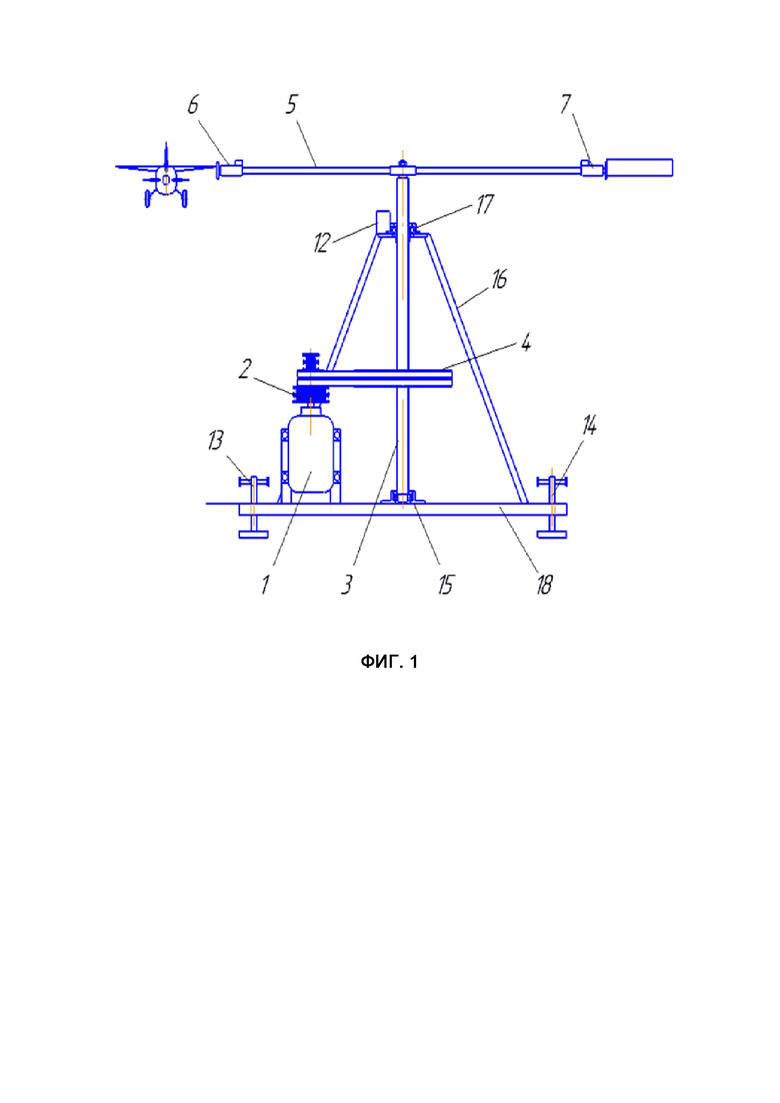
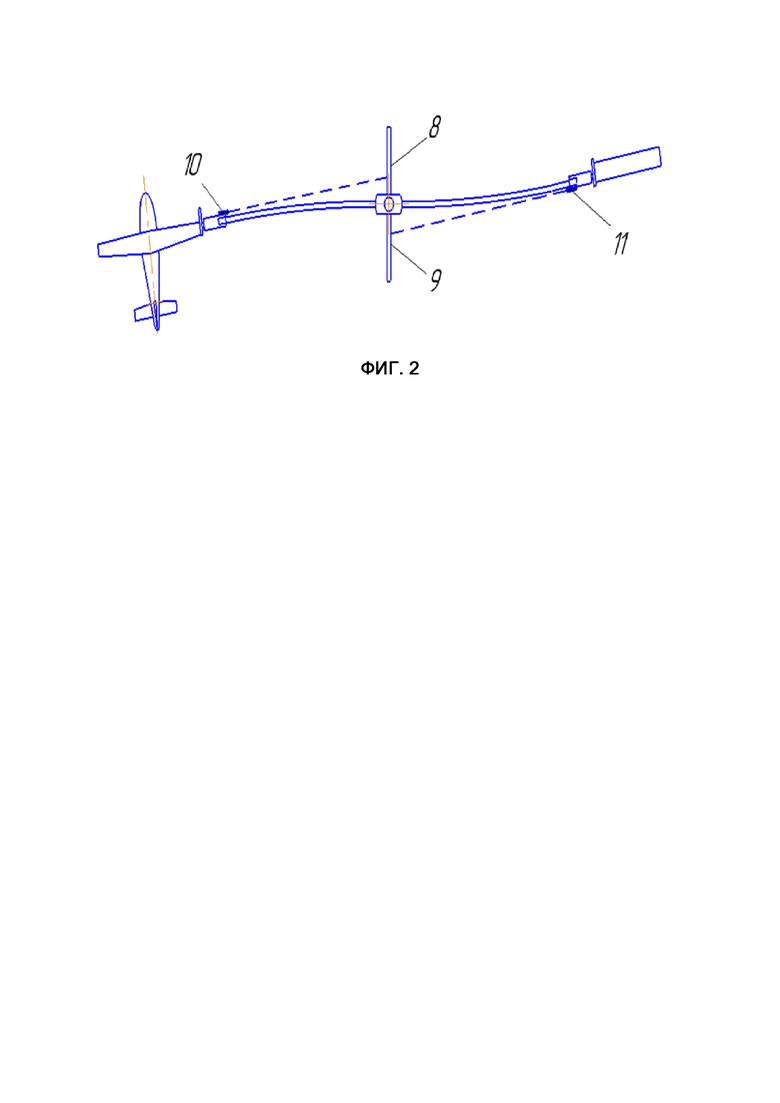
На фиг. 1 показана схема аэродинамической ротативной машины (АРМ) для определения коэффициентов лобовых сопротивлений исследуемых объектов. На фиг. 2 изображена схема регистрации световых лучей лазерных указок на шкалы при деформации упругой балки. На фиг. 3 представлена принципиальная схема управляющего устройства положением эталонного сопротивления и его отключения.
Аэродинамическая ротативная машина для определения коэффициентов лобовых сопротивлений исследуемых объектов состоит из электродвигателя 1, клиноременной (или иной) передачи 2, вала ротора 3 с ведомым шкивом 4, упругодеформируемой двуплечей балки постоянного сечения 5 с узлом крепления исследуемого объекта 6 на одном конце балки и узлом крепления с электроприводом управления положением эталонного сопротивления 7 на другом. На оси вала перпендикулярно упругодеформируемой балке закреплены шкалы 8 и 9, на которые во время испытаний проецируются световые лучи лазерных указок 10 и 11. Для считывания показаний шкал во время вращательного движения ротора используется излучатель стробоскопа 12, установленный вблизи корпуса верхнего опорного подшипника 17 ротора. Частота вращения ротора регулируется либо ступенчато путем перестановки ремней клиноременной передачи при остановленной машине, либо плавно с помощью частотного преобразователя, изменяющего частоту колебаний тока, подаваемого на электродвигатель 1 во время запуска ротора и в процессе проведения испытаний. Держатели лазерных указок 10 и 11 позволяют подстраивать их положение так, чтобы лучи точно проецировались на шкалы 8 и 9. Рама машины состоит из основания 18 с винтовыми опорами 13 и 14, позволяющими выставить ротор устройства вертикально. В средней части основания находится корпус нижнего упорно-опорного подшипника 15 ротора АРМ. В верхней части рамы посредством стоек 16 крепится корпус верхнего опорного подшипника 17 ротора. Узлы крепления двигателя 1 обеспечивают ступенчатое изменение его положения по высоте с целью изменения передаточного отношения клиноременной передачи от шкива 2 двигателя 1 к шкиву 4 вала ротора 3.
Аэродинамическая ротативная машина по пункту 2 формулы изобретения отличается тем, что на шкалах 8 и 9 установлены фоторезисторы, изменяющие свое сопротивление при попадании на них луча лазерной указки. Сигналы со шкал передаются на электронное устройство, которое их сравнивает, преобразует и выдает управляющий сигнал на электропривод управления положением эталонного сопротивления 7. При одинаковых сигналах устройство зажигает сигнальную лампочку, свидетельствующую о том, что наступило равенство аэродинамических сопротивлений испытуемого и эталонного объектов.
Определение коэффициента лобового сопротивления исследуемого объекта на описанной аэродинамической ротативной машине производится следующим образом.
После закрепления на одном конце упругодеформируемой балки 5 испытуемого объекта или его модели, а на другом эталонного сопротивления, включают электродвигатель 1, который приводит вал ротора 3 во вращательное движение. Дистанционно, управляя электроприводом управления положением эталонного сопротивления 7, добиваются одинаковых значений отклонения лучей лазеров 10 и 11 по шкалам 8 и 9. То есть устанавливают такой угол наклона эталонного сопротивления, при котором отклонение луча его лазерной указки станет равным отклонению луча от лазерной указки испытуемого объекта.
Величины деформаций плеч упругодеформируемой балки могут быть равными только при равенстве аэродинамических сопротивлений испытуемого объекта и эталонного сопротивления, то есть при условии:
В соответствии с законами аэродинамики [4] равенство (1) примет вид:
Плотность воздуха ρ и скорость V для левой и правой частей уравнения (2) имеют одинаковые значения, следовательно, после сокращения на величину скоростного напора  формула приобретет следующий вид:
формула приобретет следующий вид:

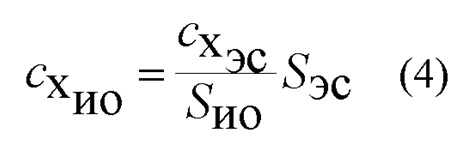
В уравнении (3) известными являются площади поперечных сечений испытуемого объекта  и эталонного тела
и эталонного тела  , а также коэффициент аэродинамического сопротивления эталонного сопротивления
, а также коэффициент аэродинамического сопротивления эталонного сопротивления  . Неизвестным остается только коэффициент лобового сопротивления исследуемого объекта
. Неизвестным остается только коэффициент лобового сопротивления исследуемого объекта  , который может быть легко определен по выражению:
, который может быть легко определен по выражению:
Для проведения экспериментальных исследований в некотором желаемом диапазоне чисел Рейнольдса при неизменных размерах испытуемого объекта необходимо обеспечить изменение скорости набегания воздушного потока. В описанной АРМ изменение скорости, а значит, и чисел Рейнольдса можно осуществлять как ступенчато посредством изменения передаточного числа клиноременной передачи, так и плавно за счет изменения частоты подаваемого тока на электродвигатель.
Источники информации:
1. Горлин С.М. Экспериментальная аэромеханика [Текст]. - М.: Высшая школа, 1970. - С. 191.
2. Мартынов А.К. Прикладная аэродинамика [Текст]: [Учеб. пособие для авиац. вузов]. - М.: Машиностроение, 1972. - С. 86.
3. Патент РФ RU 2001 131 017A МПК: G01M9/00 Способ определения аэродинамических характеристик объекта и устройство для его осуществления [Текст] / Чумак Павел Иосифович, Чумак Александр Григорьевич, Буга Александр Логинович (РФ); заявитель и патентообладатель Военный авиационный технический университет. - № 2001131017/28; заявл. 2001.11.19; опубл. 2003.08.20.
4. Аэродинамика: учебник / А.М. Мхитарян. - 2-е изд., перераб. и доп. / Репринтное воспроизведение издания 1976 г. - М.: ЭКОЛИТ, 2012. - 448 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАМЕТРА И КОНТРОЛЯ ВНУТРЕННЕГО ПРОФИЛЯ КРУПНОГАБАРИТНЫХ ИЗДЕЛИЙ | 2005 |
|
RU2288446C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО МИКРОАППАРАТА (ЛМА) С ИНТЕГРАЛЬНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ИБИНС) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263283C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛОБОВОГО СОПРОТИВЛЕНИЯ ПЕРЕМЕЩАЮЩЕГОСЯ ТЕЛА | 2010 |
|
RU2442172C2 |
| Способ определения параметров моментного двигателя постоянного тока | 2022 |
|
RU2796641C1 |
| Способ определения аэрогидродинамических сил | 1979 |
|
SU879354A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛОБОВОГО СОПРОТИВЛЕНИЯ ИССЛЕДУЕМОГО ТЕЛА В РАЗРЕЖЕННОЙ СРЕДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2371693C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛОБОВОГО СОПРОТИВЛЕНИЯ ТЕЛ | 1991 |
|
RU2103666C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА АЭРОДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ ДВИЖУЩЕГОСЯ ТЕЛА | 2000 |
|
RU2172937C1 |
| Способ оценки влияния воздушной среды на демпфирование колебаний конструкций | 2019 |
|
RU2737031C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛОБОВОГО СОПРОТИВЛЕНИЯ ИССЛЕДУЕМОГО ТЕЛА | 1992 |
|
RU2006808C1 |
Изобретение относится к устройствам для аэродинамических испытаний, а именно к приборам, на которых осуществляется круговое движение исследуемого тела. Устройство включает привод, вал и вращающуюся двуплечую балку со шкалами и узлами крепления исследуемого объекта и эталонного аэродинамического сопротивления по концам. Балка выполнена упругодеформируемой, узел крепления эталонного сопротивления снабжен электроприводом управления его положением. На оси вала ротора перпендикулярно упругодеформируемой балке закреплены шкалы, на которые во время испытаний проецируются световые лучи лазерных указок, закрепленных на концах балки. Также содержит излучатель стробоскопа, установленный вблизи корпуса верхнего опорного подшипника ротора, выполненный с возможностью считывания показаний шкал во время вращательного движения ротора. Аэродинамическое сопротивление исследуемого объекта определяется методом сравнения деформации части балки, несущей объект исследования, с деформацией части балки, несущей эталонное тело. Технический результат заключается в повышении точности определения коэффициентов сопротивления испытуемых аэродинамических тел с одновременным снижением конструктивной сложности. 1 з.п. ф-лы, 3 ил. 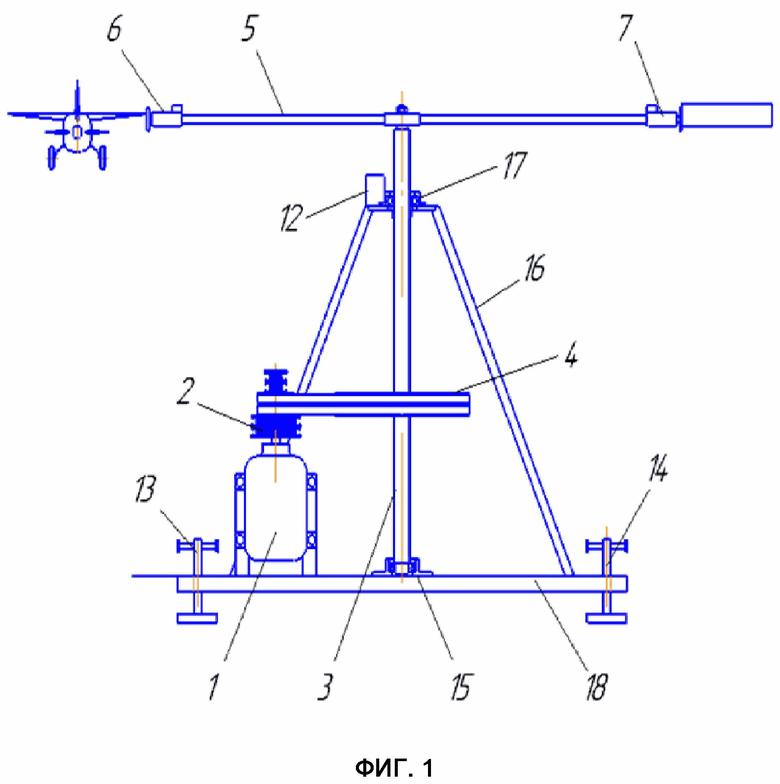
1. Аэродинамическая ротативная машина для определения коэффициентов лобовых сопротивлений исследуемых объектов, включающая привод, вал ротора и вращающуюся двуплечую балку со шкалами и узлами крепления исследуемого объекта и эталонного аэродинамического сопротивления по концам, отличающаяся тем, что балка выполнена упругодеформируемой, узел крепления эталонного сопротивления снабжен электроприводом управления его положением, на оси вала ротора перпендикулярно упругодеформируемой балке закреплены шкалы, на которые во время испытаний проецируются световые лучи лазерных указок, закрепленных на концах балки, а также содержит излучатель стробоскопа, установленный вблизи корпуса верхнего опорного подшипника ротора, выполненный с возможностью считывания показаний шкал во время вращательного движения ротора, при этом аэродинамическое сопротивление исследуемого объекта определяется методом сравнения деформации части балки, несущей объект исследования, с деформацией части балки, несущей эталонное тело.
2. Аэродинамическая ротативная машина по п.1, отличающаяся тем, что снабжена управляющим устройством, включающим частотный преобразователь, изменяющий частоту колебаний тока, подаваемого на электродвигатель, на шкалах установлены фоторезисторы, изменяющие свое сопротивление при попадании на них лучей лазерных указок, передающих сигналы на электронное устройство, которое их сравнивает, преобразует и выдает управляющий сигнал на электропривод управления положением эталонного сопротивления, обеспечивающим постепенное изменение аэродинамического сопротивления эталонного тела до величины аэродинамического сопротивления исследуемого объекта с последующей остановкой как привода положения эталонного тела, так и вращательного движения ротора машины.
| RU 2001131017 A, 20.08.2003 | |||
| Электромеханический стенд | 2020 |
|
RU2736347C1 |
| Мартынов А.К | |||
| Прикладная аэродинамика: - М.: Машиностроение, 1972 | |||
| - с | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| US 9857275 B2, 02.01.2018 | |||
| JP 4297847 A, 21.10.1992. | |||

