Изобретение относится к области электротехники, а именно к устройствам идентификации параметров электрических машин, и может найти применение для идентификации параметров двигателей постоянного тока, например, моментных двигателей постоянно тока с возбуждением от постоянных моментов.
Известен способ определения параметров двигателя, реализованный в установке для исследований режимов работы электродвигателей переменного тока (Полезная модель РФ №133321, опубликовано 10.10.2013, бюл. №28), в котором нагрузочный момент для двигателя переменного тока создают высокомоментным двигателем постоянного тока с возбуждением от постоянных магнитов, при этом валы двух двигателей соединяют муфтой. Для изменения нагрузки на валу двигателя переменного тока к якорю двигателя постоянного тока подключают электронный блок нагрузки и датчик напряжения.
Недостаток данного способа состоит в том, что для создания нагрузочного момента для исследуемого двигателя применяют дополнительный двигатель, момент на валу которого зависит от многих факторов, что снижает точность определения нагрузочного момента, а, следовательно, и точность определения параметров исследуемого двигателя. Кроме того данный способ не позволяет отдельно испытывать один двигатель.
Известен также способ для исследования двигателей, реализованный в учебно-лабораторном стенде для изучения электрических машин и электроприводов (Патент РФ №2473921, опубликовано 27.01.2013, бюл. №3) в котором нагрузочный момент для двигателя переменного тока создают двигателем постоянного тока и наоборот - нагрузочный момент для двигателя постоянного тока создают двигателем переменного тока. При этом выходные валы двигателей соединяют между собой через промежуточные мотор-редукторы и муфту.
Однако недостатком данного способа является наличие двух двигателей в системе создания момента нагрузки, что не позволяет отдельно испытывать один двигатель, при этом также не указано о методе повышения точности при серии измерений.
Известен способ определения параметров двигателя, принятый за прототип и реализованный в стенде для изучения средств автоматизации испытаний электрических мотор-редукторов (Патент РФ №2334967, опубликовано 27.09.2008, бюл. №27). Способ базируется на создании момента нагрузки для исследуемого двигателя с помощью фрикционного модуля, содержащем тормозной барабан, внутри которого жестко закрепляют вал двигателя. При этом тормозной барабан зажимают между неподвижной и с подвижной фрикционными колодками, усилие сжатия которых регулируют с помощью управляемого тормозного устройства, усилие в котором создают дополнительным электроприводом, вал которого с помощью тягового барабана соединяют с подвижной фрикционной колодкой. Момент нагрузки на валу измеряют по углу поворота тягового барабана. Для определения параметров также измеряют напряжение питания, ток якоря и частоту вращения исследуемого двигателя.
Недостатком данного способа определения параметров двигателя является многозвенность операций создания момента нагрузки фрикционным модулем, что снижает точность формирования момента нагрузки а, следовательно, точность определения параметров двигателя, и является ограничением в применении для исследования маломощных двигателей постоянного тока. При этом также не указано о методе повышения точности при серии измерений.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении операций создания момента нагрузки на валу двигателя и повышении точности определения параметров двигателя за счет обработки серии измерений методом наименьших квадратов.
Технический результат достигается тем, что в способе определения параметров моментного двигателя постоянного тока, включающем создание относительно оси вращения регулируемого нагрузочного фрикционного момента с помощью обжатия вала двигателя фрикционным модулем с регулируемым усилием, а также измерение напряжения, тока якоря и частоты вращения, новым является то, что фрикционный нагрузочный момент фрикционного модуля измеряют с помощью маятникового груза, который жестко соединяют с фрикционным модулем, а при вращении якоря силы сухого трения между валом двигателя и внутренней поверхностью фрикционного модуля отклоняют маятниковый груз от местной вертикали, создавая момент нагрузки, определяемый по формуле

где  - масса маятникового груза;
- масса маятникового груза;  - расстояние от центра масс маятникового груза до оси вращения;
- расстояние от центра масс маятникового груза до оси вращения;  - угол отклонения маятникового груза от местной вертикали;
- угол отклонения маятникового груза от местной вертикали;  частота вращения якоря,
частота вращения якоря,
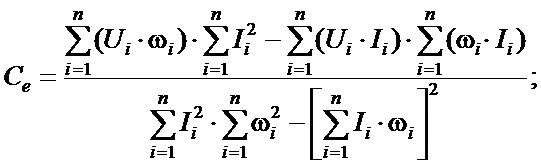
при этом параметры моментного двигателя определяют с помощью процедуры метода наименьших квадратов в соответствии с формулами
 где
где  коэффициенты противоэдс и момента, активное сопротивление якоря;
коэффициенты противоэдс и момента, активное сопротивление якоря;  напряжение, ток якоря и частота вращения;
напряжение, ток якоря и частота вращения;  число измерений.
число измерений.
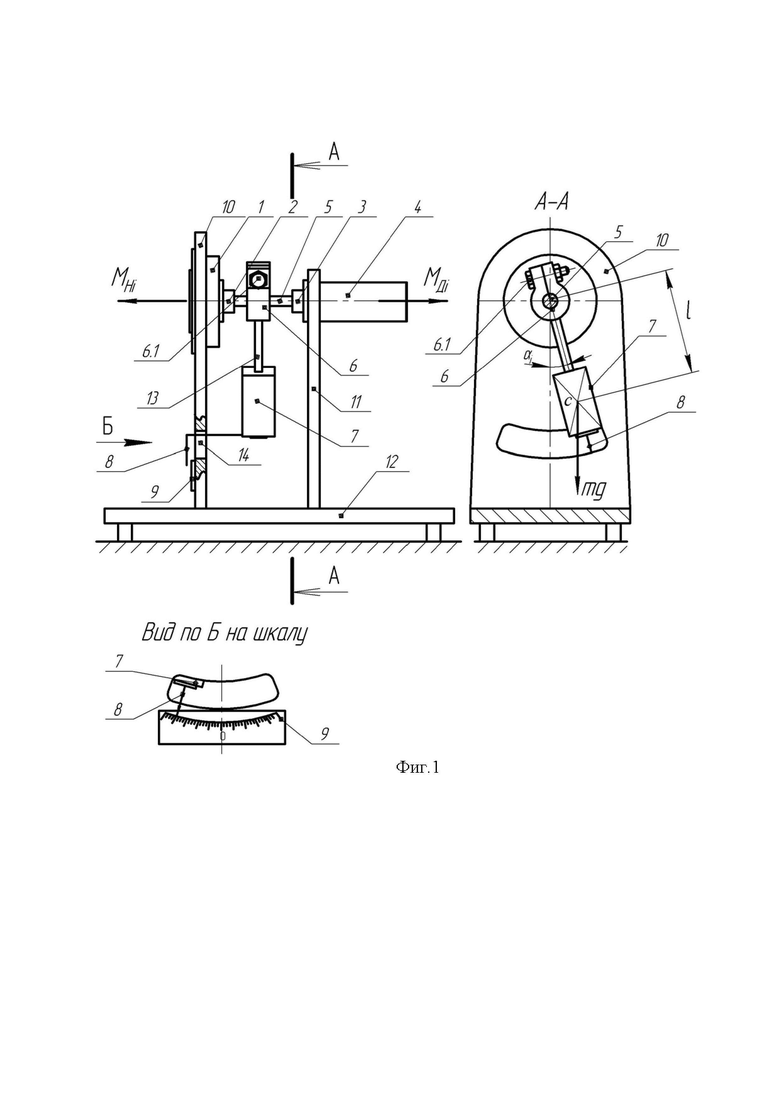
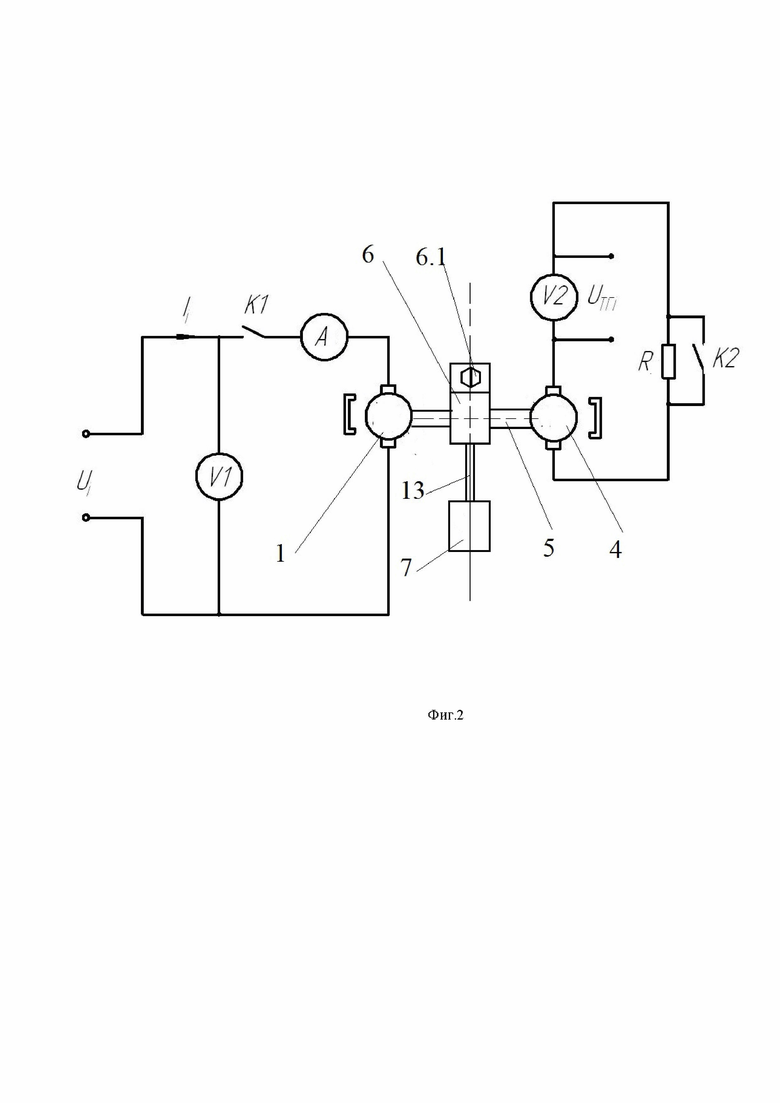
Сущность изобретения поясняется чертежами, приведенными на фиг.1, на которой представлен вариант кинематической схемы, и фиг.2, на которой показан вариант электро-кинематической схемы.
На фиг.1 и фиг.2 приняты следующие обозначения:
1 - двигатель постоянного тока;
2 - первая соединительная муфта;
3 - вторая соединительная муфта;
4 - измеритель частоты вращения (тахогенератор);
5 - дополнительный фрикционный вал;
6 - фрикционный модуль;
6.1 - винт;
7 - эталонный груз;
8 - стрелка;
9 - шкала;
10 - стойка левая;
11- стойка правая;
12 - основание (корпус);
13 - штанга;
14 - окно.
Буквенные обозначения:
 центр масс эталонного груза;
центр масс эталонного груза;
 масса эталонного груза;
масса эталонного груза;
 ускорение силы тяжести;
ускорение силы тяжести;
 расстояние между центром масс эталонного груза и осью вращения;
расстояние между центром масс эталонного груза и осью вращения;
 угол отклонения эталонного груза от начального положения, когда
угол отклонения эталонного груза от начального положения, когда
якорь не вращается (с большой степенью точности относительно местной вертикали);
 электромагнитный момент на валу двигателя;
электромагнитный момент на валу двигателя;
 момент нагрузки, создаваемый фрикционным модулем;
момент нагрузки, создаваемый фрикционным модулем;
 напряжение регулируемого источника питания (на схеме не указан);
напряжение регулируемого источника питания (на схеме не указан);
 ток якоря двигателя;
ток якоря двигателя;
 вольтметр, измеряющий напряжение питания;
вольтметр, измеряющий напряжение питания;
 амперметр, измеряющий ток якоря двигателя;
амперметр, измеряющий ток якоря двигателя;
 вольтметр, измеряющий напряжение тахогенератора;
вольтметр, измеряющий напряжение тахогенератора;
 напряжение на выходе тахогенератора;
напряжение на выходе тахогенератора;
 ключ, подключает источник питания к двигателю;
ключ, подключает источник питания к двигателю;
 ключ, шунтирующий резистор R.
ключ, шунтирующий резистор R.
Описание способа.
1). Описание установки, на которой реализуется предлагаемый способ.
В соответствии с фиг.1 исследуемый двигатель постоянного тока 1 крепится к левой стойке 10, измеритель частоты вращения 4 крепится к правой стойке 11. Обе стойки выставляются по оси вращения двигателя и крепятся к основанию 12. Для кинематического (жесткого) соединения между собой валов двигателя 1 и измерителя частоты вращения (тахогенератора) 4 служат первая 2 и вторая 3 соединительные муфты, которые соединяют фрикционный вал 5, соответственно с ротором двигателя и ротором тахогенератора 4. Для создания момента нагрузки на валу двигателя 1и, соответственно, на фрикционном валу служит фрикционный модуль 6, который представляет собой струбцину с внутренней цилиндрической поверхностью, охватывающей фрикционный вал. При этом сила сухого трения, возникающая между струбциной и фрикционным валом, регулируется перемещением винта 6.1. С фрикционным модулем с помощью штанги 13 соединен эталонный груз 7, расстояние  между центром масс груза и осью вращения может регулироваться, а сам груз может быть заменяемым. Для измерения угла поворота эталонного груза служит стрелка 8, жестко соединенная с ним, и шкала 9, нанесенная на левой стойке 10. Для перемещения стрелки 8 в левой стойке 10 имеется окно 14.
между центром масс груза и осью вращения может регулироваться, а сам груз может быть заменяемым. Для измерения угла поворота эталонного груза служит стрелка 8, жестко соединенная с ним, и шкала 9, нанесенная на левой стойке 10. Для перемещения стрелки 8 в левой стойке 10 имеется окно 14.
В соответствии с фиг.2 напряжение управления  , измеряемое вольтметром V1, подается на якорную обмотку двигателя 1от регулируемого источника питания (на фиг.2 не показан). При замыкании ключа K1 по якорю двигателя потечет ток
, измеряемое вольтметром V1, подается на якорную обмотку двигателя 1от регулируемого источника питания (на фиг.2 не показан). При замыкании ключа K1 по якорю двигателя потечет ток  , измеряемый амперметром А1. Якорь двигателя1, тахогенератор 4 и фрикционный вал 5, их соединяющий начнут вращаться с частотой вращения
, измеряемый амперметром А1. Якорь двигателя1, тахогенератор 4 и фрикционный вал 5, их соединяющий начнут вращаться с частотой вращения  , которая измеряется вольтметром V2, подключенным к выходным клеммам тахогенератора либо непосредственно при замыкании ключа K2, либо через резистор R при размыкании ключа K2 (для изменения масштаба шкалы вольтметра V2). При этом
, которая измеряется вольтметром V2, подключенным к выходным клеммам тахогенератора либо непосредственно при замыкании ключа K2, либо через резистор R при размыкании ключа K2 (для изменения масштаба шкалы вольтметра V2). При этом
 ,
,
где  масштабный коэффициент тахогенератора.
масштабный коэффициент тахогенератора.
2). Математическое описание существа способа определения параметров двигателя.
Постановка задачи.
Измеряя электрические параметры и , механические параметры  и
и  , где
, где  (
( число измерений), определить:
число измерений), определить:  коэффициент момента двигателя;
коэффициент момента двигателя;  коэффициент противо-ЭДС двигателя и
коэффициент противо-ЭДС двигателя и  - активное сопротивление обмотки якоря с минимальными погрешностями.
- активное сопротивление обмотки якоря с минимальными погрешностями.
Для этого составим математическую модель вращения якоря двигателя с учетом воздействия фрикционного модуля в виде системы трёх уравнений в установившемся режиме.
Уравнение моментов относительно оси вращения
 , (1)
, (1)
где  - угловая скорость вращения вала относительно статора двигателя;
- угловая скорость вращения вала относительно статора двигателя;  электромагнитный момент, развиваемый двигателем; коэффициент момента двигателя;
электромагнитный момент, развиваемый двигателем; коэффициент момента двигателя;  ток обмотки якоря;
ток обмотки якоря;  номер измерения.
номер измерения.
 - суммарный момент сил сухого трения, действующих на валу (трение в подшипниках и т.д.);
- суммарный момент сил сухого трения, действующих на валу (трение в подшипниках и т.д.);  - модуль момента сил сухого трения в моментном двигателе;
- модуль момента сил сухого трения в моментном двигателе;  - модуль момента сил сухого трения тахогенератора;
- модуль момента сил сухого трения тахогенератора;  - модуль момента сил сухого трения фрикционного модуля;
- модуль момента сил сухого трения фрикционного модуля;  - момент сил аэродинамического сопротивления, действующих на вращающуюся часть системы.
- момент сил аэродинамического сопротивления, действующих на вращающуюся часть системы.
Моменты  являются постоянными величинами и их можно учесть в расчетах, момент
являются постоянными величинами и их можно учесть в расчетах, момент  мал по величине, так как моментные двигатели постоянного тока являются низкооборотными. Поэтому в алгоритмах их можно не учитывать.
мал по величине, так как моментные двигатели постоянного тока являются низкооборотными. Поэтому в алгоритмах их можно не учитывать.
Уравнение электрической цепи моментного двигателя:
 ,(2)
,(2)
где  активное сопротивление обмотки якоря;
активное сопротивление обмотки якоря;  противо-ЭДС, наводимая в обмотке якоря; коэффициент противо-ЭДС двигателя;
противо-ЭДС, наводимая в обмотке якоря; коэффициент противо-ЭДС двигателя;  напряжение на зажимах цепи якоря (напряжение управления).
напряжение на зажимах цепи якоря (напряжение управления).
Уравнение движения груза фрикционного модуля (см. фиг.1):
 ,(3)
,(3)
где  момент сил сухого трения, действующих на груз со стороны вала;
момент сил сухого трения, действующих на груз со стороны вала;  - момент маятниковости, возникающий при отклонении груза от вертикали.
- момент маятниковости, возникающий при отклонении груза от вертикали.
Для определения параметров двигателя при проведении  измерений воспользуемся методом наименьших квадратов, в котором формируется функция невязки и минимизируется по искомым параметрам.
измерений воспользуемся методом наименьших квадратов, в котором формируется функция невязки и минимизируется по искомым параметрам.
Определение  и
и  .
.
Функция невязки  в этом случае строится на основании уравнения (2) и имеет вид:
в этом случае строится на основании уравнения (2) и имеет вид:
 (4)
(4)
Минимум выражение (4) достигает при выполнении условий
 ;
;  ,
,
которые принимают вид и представляют систему двух алгебраических уравнений относительно параметров  и
и  :
:
 (5)
(5)
 (6)
(6)
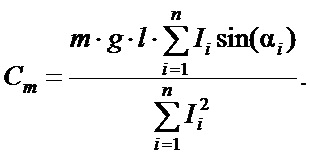
решение которой определяет искомые параметры
 (7)
(7)
 (8)
(8)
Для нахождения  обратимся теперь к уравнению (1) с учётом (3).
обратимся теперь к уравнению (1) с учётом (3).
 . (9)
. (9)
Функция невязки  для выражения (9) имеет вид:
для выражения (9) имеет вид:
Минимум это выражение достигает при 
из которого определяем  :
:
 (10)
(10)
Варианты реализации алгоритмов.
1). Полуавтоматический.
Исходные параметры  ,
,  и результаты измерений
и результаты измерений  ,
, ,
, ,
,  записывают в файл, например, программы Excel и по формулам (7), (8) и (10) вычисляют искомые параметры.
записывают в файл, например, программы Excel и по формулам (7), (8) и (10) вычисляют искомые параметры.
2). Автоматический.
В этом случае измеряемые параметры через преобразователи «аналог-код» записывают в ЭВМ и по формулам (7), (8) и (10) вычисляют искомые параметры.
Независимо от вариантов реализации существо предлагаемого способа содержится в особенности создания нагрузочного момента с помощью фрикционного модуля и обработки результатов измерений с применением метода наименьших квадратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство создания нагрузочного момента двигателя постоянного тока | 2022 |
|
RU2796640C1 |
| Установка для идентификации параметров двигателя постоянного тока | 2024 |
|
RU2828829C1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Способ контроля скользящего контакта электромашинного преобразователя с электродвигателем постоянного тока | 1982 |
|
SU1073714A1 |
| Машина для определения усталостно-фрикционных свойств материалов | 2020 |
|
RU2743496C1 |
| Установка для определения коэффициента трения материалов | 1960 |
|
SU142069A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Способ контроля многополюсных машин постоянного тока с волновой обмоткой якоря | 1980 |
|
SU918900A1 |
Изобретение относится к области электротехники. Технический результат - повышение точности определения параметров двигателя. Заявленный способ базируется на создании нагрузочного момента силами сухого трения фрикционным модулем, которым обжимают вал двигателя с регулируемым усилием, а величину фрикционного момента определяют по измеренному углу отклонения маятникового груза, который жестко соединяют с фрикционным модулем. Определение параметров моментного двигателя осуществляют при помощи процедуры метода наименьших квадратов в соответствии с заданными формулами. 2 ил.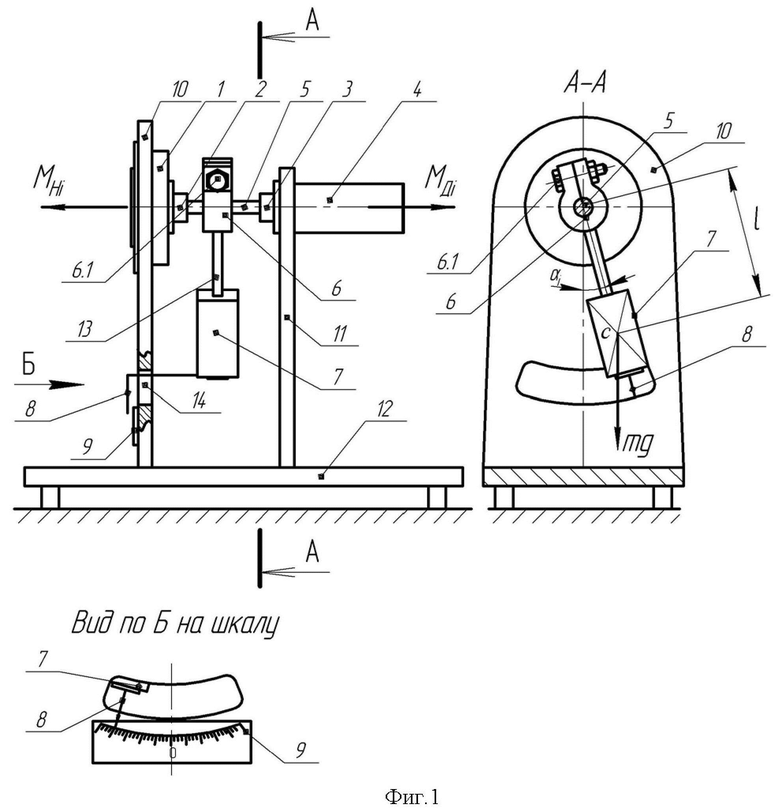
Способ определения параметров моментного двигателя постоянного тока, включающий создание относительно оси вращения регулируемого нагрузочного фрикционного момента с помощью обжатия вала двигателя фрикционным модулем с регулируемым усилием, а также измерение напряжения, тока якоря и частоты вращения, отличающийся тем, что фрикционный нагрузочный момент фрикционного модуля измеряют с помощью маятникового груза, который жестко соединяют с фрикционным модулем, а при вращении якоря силы сухого трения между валом двигателя и внутренней поверхностью фрикционного модуля отклоняют маятниковый груз от местной вертикали, создавая момент нагрузки, определяемый по формуле

где  – масса маятникового груза;
– масса маятникового груза;  – расстояние от центра масс маятникового груза до оси вращения;
– расстояние от центра масс маятникового груза до оси вращения;  – угол отклонения маятникового груза от местной вертикали;
– угол отклонения маятникового груза от местной вертикали;  частота вращения якоря,
частота вращения якоря,
при этом параметры моментного двигателя определяют с помощью процедуры метода наименьших квадратов в соответствии с формулами
 где
где  коэффициенты противоэдс и момента, активное сопротивление якоря;
коэффициенты противоэдс и момента, активное сопротивление якоря;  напряжение, ток якоря и частота вращения;
напряжение, ток якоря и частота вращения;  число измерений.
число измерений.
| СТЕНД ДЛЯ ИЗУЧЕНИЯ СРЕДСТВ АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ЭЛЕКТРИЧЕСКИХ МОТОР-РЕДУКТОРОВ | 2007 |
|
RU2334967C1 |
| УЧЕБНО-ЛАБОРАТОРНЫЙ СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И ЭЛЕКТРОПРИВОДОВ | 2011 |
|
RU2473921C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| CN 103048620 A, 17.04.2013 | |||
| CN 109975705 A, 05.07.2019. | |||
