Предлагаемое изобретение относится к панорамному телевизионному наблюдению, которое выполняется компьютерной системой при помощи телевизионной камеры, обеспечивающей последовательно и параллельно круговой обзор в четырех шаровых слоях окружающей сферической области пространства. При этом для каждого из этих шаровых слоев телевизионный контроль ситуации в реальном масштабе времени осуществляется в пространственном угле 360 градусов по азимуту и десятки градусов по углу места. Телевизионная камера такой системы имеет два сенсора: «кольцевой» и «прямоугольный» (матричный) фотоприемники, - изготовленные по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП). А на экране компьютерного монитора воспроизводится комбинированное изображение, которое по отношению к первоначально предъявляемому изображению состоит из априори выбранного участка с необходимым увеличением (масштабированием) и остальной его части с неизменным масштабом.
Наиболее близким по технической сущности к заявляемому изобретению следует считать устройство компьютерной системы панорамного телевизионного наблюдения с селективным масштабированием изображения [1, (см. формулу изобретения по варианту 2)], содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в разъем расширения на материнской плате сервера установлена плата видео, согласованная по каналам ввода/вывода, управлению и питанию с шиной сервера, содержащая блок электрического вписывания изображения (БЭВИ), который осуществляет программным путем вложение (вставку) «кольцевого» кадра телевизионной камеры в «прямоугольный» растр компьютерного монитора, причем в режиме наблюдения панорамного сюжета полностью вход БЭВИ подключен к выходу блока оперативной памяти на кадр, а выход БЭВИ - к выходу «сеть» сервера; при этом в состав телевизионной камеры входит панорамный объектив, сенсорный блок, смеситель, генератор электронной отметки «крест», селектор синхроимпульсов и мультиплексор, причем сенсорный блок содержит в своем составе электромеханическую турель с поворотом на два положения, управляемую по команде с компьютера оператора системы, при этом на турели на регулируемом про высоте фланце расположен «кольцевой» фотоприемник и с разнесением на 180° - блок наведения, который по команде оператора с компьютера осуществляет в пределах круга плавное пространственное перемещение установленного на нем на регулируемом по высоте фланце «прямоугольного» (матричного) фотоприемника, причем в первом положении турели оптическое изображение панорамного объектива проецируется на мишень «кольцевого» фотоприемника, а во втором положении турели фрагмент оптического кадра панорамного объектива проецируется на мишень матричного фотоприемника, при этом «кольцевой» фотоприемник выполнен на кристалле, изготовленном по технологии КМОП, и содержит на мишени линейки светочувствительных элементов (пикселов), расположенных вдоль радиальных направлений от воображаемого центра кругового кольца к его внешней периферии, причем число светочувствительных пикселов в каждой «кольцевой» строке мишени одинаково, а их площадь (А) от строки к строке различна, увеличиваясь по мере движения к внешней периферии сенсора, причем мишень сенсора состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки сенсора, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в сенсоре, а количество «радиальных» шин видео - число пикселов в каждой строке сенсора; при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «Видео» «кольцевого» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки «кольцевого» сенсора изменяется по соотношению:

где K1 - коэффициент усиления активного пиксела первой строки «кольцевого» фотоприемника, величина показателя которого равна единице;
Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей строки считывания в «кольцевом» сенсоре, при этом матричный фотоприемник, как и «кольцевой» сенсор, выполнен по технологии КМОП, с аналогичной организацией по методу «координатная адресация», причем число его «прямоугольных» строк равно числу» кольцевых» строк у «кольцевого» сенсора, а при одинаковой светочувствительной площади (Δ) всех активных пикселов мишени коэффициент усиления Km активного пиксела для каждой текущей «прямоугольной»» строки мишени матричного сенсора сохраняется постоянным и неизменным по величине, а для выравнивания чувствительностей «кольцевого» и матричного каналов должна быть увеличена в Δ1/Δ раз величина номинального коэффициента Km активного пиксела матричного сенсора; первый информационный вход смесителя подключен к выходу «Видео» «кольцевого» фотоприемника, а второй информационный вход смесителя - к выходу сигнала генератора электронной отметки «крест», а выход смесителя - к первому информационному входу мультиплексора, второй информационный вход которого подключен к выходу «Видео» матричного фотоприемника; управляющий вход генератора электронной отметки «крест» подключен к выходу датчика положения блока наведения, а выход «Видео» «кольцевого» фотоприемника подключен дополнительно к входу селектора синхроимпульсов, выход кадровых синхроимпульсов (КСИ) которого подключен к первому входу генератора электронной отметки «крест» и соответственно к управляющему входу мультиплексора, выход строчных синхроимпульсов (ССИ) селектора синхроимпульсов - ко второму входу генератора электронной отметки; а выход смеси синхроимпульсов приемника (ССП) селектора синхроимпульсов - к входу внешней синхронизации матричного фотоприемника, выход «Видео» которого подключен ко второму информационному входу мультиплексора, выход которого является выходом «Видео» телевизионной камеры, первый управляющий вход телевизионной камеры подключен к входу управления ее сенсорного блока, второй управляющий вход телевизионной камеры - к входу управления ее турели, а третий управляющий вход телевизионной камеры - к входу управления ее блока наведения, при этом плата видео, установленная в разъем расширения на материнской плате сервера, выполняет демультиплексирование входного мультиплексного сигнала изображения «Видео» на два канала «Видео 1» и «Видео 2» с последующей записью видеосигналов соответственно в первый и второй блоки оперативной памяти на кадр, формирование сигнала «окошко», выполнение коммутации видеосигналов «Видео 1» и «Видео 2» по сигналу «окошко» с формированием комбинированного изображения, выход которого является выходом видеосигнала телевизионной системы.
В прототипе [1] обеспечивается возможность визуального контроля выбираемых участков панорамного изображения в увеличенном масштабе одновременно с наблюдением панорамного сцены полностью по методу селективного масштабирования. При этом гарантируется повышенная степень интеграции телевизионной камеры за счет выполнения «кольцевого» и матричного сенсоров по технологии КМОП, позволяющей разместить на их кристаллах и необходимое электронное «обрамление каждого из фотоприемников.
Следует отметить и важнейшее условие прототипа [1,], а именно: формат мишени «кольцевого» фотоприемника равен формату кадра панорамного объектива, а величина площади пиксела (Δ1) первой строки «кольцевого» сенсора превышает величину площади пиксела (Δ) матричного сенсора.
Недостаток прототипа - возможность мониторинга панорамного сюжета только в одном и единственном шаровом слое сферической области окружающего пространства.
Задачей изобретения является возможность ведения мониторинга панорамного сюжета в четырех слоях окружающего пространства путем селективного масштабирования изображения применительно для беспилотного летательного аппарата.
Поставленная задача в заявляемом устройстве компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата решается тем, что, как и в устройстве прототипа [1], которое содержит последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютеров, при этом в разъем расширения на материнской плате сервера установлена плата видео, согласованная по каналам ввода/вывода, управлению и питанию с шиной сервера, содержащая БЭВИ, который осуществляет программным путем вложение (вставку) «кольцевого» кадра телевизионной камеры в «прямоугольный» растр компьютерного монитора, причем в режиме наблюдения панорамного сюжета полностью вход БЭВИ подключен к выходу блока оперативной памяти на кадр, а выход БЭВИ - к выходу «сеть» сервера; при этом в состав телевизионной камеры входит первый панорамный объектив, сенсорный блок, смеситель, генератор электронной отметки «крест», селектор синхроимпульсов и мультиплексор, причем сенсорный блок содержит в своем составе электромеханическую турель с поворотом на два положения, управляемую по команде с компьютера оператора системы, при этом на турели на регулируемом про высоте фланце расположен «кольцевой» фотоприемник и с разнесением на 180° - блок наведения, который по команде оператора с компьютера осуществляет в пределах круга плавное пространственное перемещение установленного на нем на регулируемом по высоте фланце «прямоугольного» (матричного) фотоприемника, причем в первом положении турели оптическое изображение панорамного объектива проецируется на мишень «кольцевого» фотоприемника, а во втором положении турели фрагмент оптического кадра панорамного объектива проецируется на мишень матричного фотоприемника, при этом «кольцевой» фотоприемник выполнен на кристалле, изготовленном по технологии КМОП, и содержит на мишени линейки светочувствительных элементов (пикселов), расположенных вдоль радиальных направлений от воображаемого центра кругового кольца к его внешней периферии, причем число светочувствительных пикселов в каждой «кольцевой» строке мишени одинаково, а их площадь (А) от строки к строке различна, увеличиваясь по мере движения к внешней периферии сенсора, причем мишень сенсора состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный АЦП, обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки сенсора, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в сенсоре, а количество «радиальных» шин видео - число пикселов в каждой строке сенсора; при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «Видео» «кольцевого» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки «кольцевого» сенсора изменяется по соотношению (1), а изменение коэффициента усиления Km активного пиксела для каждой текущей «кольцевой» строки сенсора обеспечивает одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения, при этом матричный фотоприемник, как и «кольцевой» сенсор, выполнен по технологии КМОП, с аналогичной организацией по методу «координатная адресация», причем число его «прямоугольных» строк равно числу» кольцевых» строк у «кольцевого» сенсора, а при одинаковой светочувствительной площади (J) всех активных пикселов мишени коэффициент усиления Km активного пиксела для каждой текущей «прямоугольной»» строки мишени матричного сенсора сохраняется постоянным и неизменным по величине, а для выравнивания чувствительностей «кольцевого» и матричного каналов должна быть увеличена в Δ1/Δ раз величина номинального коэффициента Km активного пиксела матричного сенсора; первый информационный вход смесителя подключен к выходу «Видео» «кольцевого» фотоприемника, а второй информационный вход смесителя - к выходу сигнала генератора электронной отметки «крест», а выход смесителя - к первому информационному входу мультиплексора, второй информационный вход которого подключен к выходу «Видео» матричного фотоприемника; управляющий вход генератора электронной отметки «крест» подключен к выходу датчика положения блока наведения, а выход «Видео» «кольцевого» фотоприемника подключен дополнительно к входу селектора синхроимпульсов, выход КСИ которого подключен к первому входу генератора электронной отметки «крест» и соответственно к управляющему входу мультиплексора, выход ССИ селектора синхроимпульсов - ко второму входу генератора электронной отметки; а выход ССП селектора синхроимпульсов - к входу внешней синхронизации матричного фотоприемника, выход «Видео» которого подключен ко второму информационному входу мультиплексора, выход которого является выходом «Видео» телевизионной камеры, первый управляющий вход телевизионной камеры подключен к входу управления ее сенсорного блока, второй управляющий вход телевизионной камеры - к входу управления ее турели, а третий управляющий вход телевизионной камеры - к входу управления ее блока наведения, при этом плата видео, установленная в разъем расширения на материнской плате сервера, выполняет демультиплексирование входного мультиплексного сигнала изображения «Видео» на два канала «Видео 1» и «Видео 2» с последующей записью видеосигналов соответственно в первый и второй блоки оперативной памяти на кадр, формирования сигнала «окошко», выполнения коммутации видеосигналов «Видео 1» и «Видео 2» по сигналу «окошко» с формированием комбинированного изображения, выход которого является выходом видеосигнала телевизионной системы, но при этом в отличие от прототипа [1], в состав телевизионной камеры введен второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив, а также демодулятор высокочастотных управляющих команд оператора системы (ДКО), транслируемых по беспроводной линии связи от сервера на телевизионную камеру, и блок позиционирования сенсоров (БПС), выполненный на базе шагового двигателя, вал которого непосредственно или через редуктор механически связан с сенсорным блоком, обеспечивая по команде оператора, поступающей с компьютера в телевизионную камеру, пространственный поворот сенсорного блока на угол 90° в пошаговом режиме четыре раз за цикл, так что его мишень, установленная по умолчанию симметрично в положение напротив первого панорамного объектива, последовательно устанавливается сначала симметрично в положение напротив второго панорамного объектива, затем симметрично в положение напротив третьего панорамного объектива, а в заключении - симметрично в положение напротив четвертого панорамного объектива, при этом первый, второй и третий управляющие входы телевизионной камеры подключены соответственно к первому, второму и третьему входам управления ДКО, первый выход которого через БПС подключен к входу управления сенсорного блока, а второй и третий выходы ДКО - соответственно к входам управления турели и блока наведения, причем мультиплексор видеосигнала телевизионной камеры выполняет дополнительно высокочастотное модулирование цифрового телевизионного сигнала для осуществления его беспроводной передачи на сервер, при этом новый цифровой видеосигнал, формируемый в телевизионной камере после завершения каждого из четырех поворотов фотоприемника, поочередно подается на сервер, в качестве которого используется системный блок компьютера оператора системы.
Совокупность известных и новых признаков заявляемого устройства не известна из уровня техники, следовательно, предлагаемое техническое решение соответствует критерию новизны.
Важно отметить следующее. Светочувствительная площадь пикселов мишени «кольцевого» фотоприемника, как и для прототипа [1], от строки к строке различна. Это вызывается необходимостью для «кольцевого» сенсора, имеющего одинаковое число пикселов в каждой строке, выравнивания разрешающей способности в пределах кадра путем обеспечения одинаковой величины технологического (производственного) зазора между светочувствительными элементами. Но в данном решении обеспечено и необходимое выравнивание чувствительности обоих каналов телевизионного наблюдения, использующих такие сенсоры.
Поэтому предлагаемое техническое решение соответствует критерию о наличии изобретательского уровня.
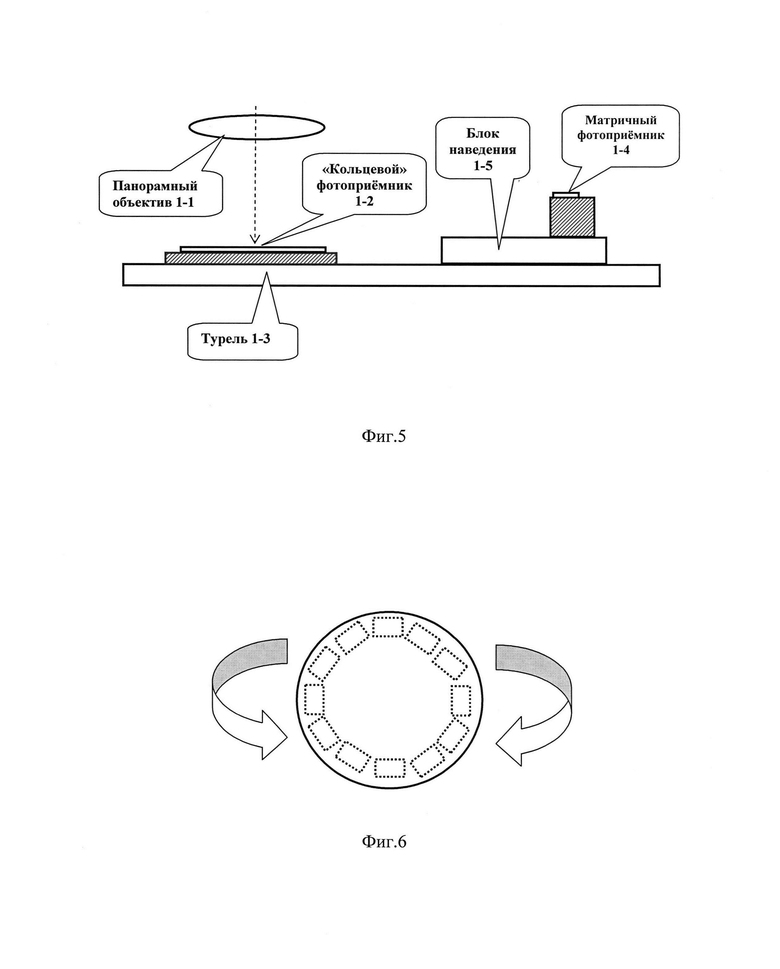
На фиг. 1 приведена структурная схема заявляемого устройства компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата; на этом же чертеже - структурная схема телевизионной камеры в ее составе; на фиг. 2 показаны все четыре возможные положения сенсорного блока телевизионной камеры, реализующие мониторинг окружающего пространства последовательно в четырех слоях: сзади, справа, спереди и слева; на фиг. 3 приведена схемотехническая организация «кольцевого» фотоприемника; на фиг. 4 - подробности этой организации применительно к отдельно взятому «радиальному» столбцу; на фиг. 5 представлено размещение «кольцевого» и матричного фотоприемников на поворотной турели, штриховкой на этом чертеже показаны котировочные фланцы, которые раздельно регулируются по высоте, обеспечивая точную настройку заднего отрезка объектива (заднего фокуса) для каждого из фотоприемников; на фиг. 6 - иллюстрация возможных положений мишени матричного фотоприемника на платформе блока наведения; на фиг. 7 - иллюстрация выполнения задачи по электрическому вписыванию изображения «кольцевого» кадра в прямоугольный растр компьютерного монитора; на фиг. 8 - иллюстрация формирования комбинированного изображения на экране компьютерного монитора; на фиг. 10 - пример выполнения электрической схемы блока наведения; на фиг. 9, по данным [2], представлена фотография изображения, полученного при помощи отечественного панорамного зеркально-линзового объектива; на фиг. 11 - приведена иллюстрация принципа действия шагового двигателя, который используется в составе телевизионной камеры.
Заявляемое устройство компьютерной системы панорамного телевизионного наблюдения с селективным масштабированием изображения, см. фиг. 1, содержит последовательно соединенные телевизионную камеру 1 и сервер 2 (с установленной в нем платой видео), который является узлом локальной вычислительной сети, с возможностью подключения двух или более персональных компьютеров в позиции 3. В качестве сервера 2 использован системный блок компьютера 4 оператора системы.
Телевизионная камера 1, см. фиг. 1, содержит в своем составе первый панорамный объектив 1-1-1, второй панорамный объектив 1-1-2, третий панорамный объектив 1-1-1-3 и четвертый панорамный объектив 1-1-1-4; сенсорный блок (отмечен линиями из квадратных точек), имеющий в составе электромеханическую турель 1-3, на которой расположены «кольцевой» фотоприемник 1-2 и матричный фотоприемник 1-4, который установлен на блок наведения 1-5; также в состав телевизионной камеры 1 входит смеситель 1-6, генератор 1-7 электронной отметки «крест», селектор синхроимпульсов 1-8, мультиплексор 1-9, выход которого является выходом «Видео» телевизионной камеры, а также блок позиционирования сенсора (БПС 1-10), механически связанный с сенсорным блоком, и демодулятор команд оператора (ДКО 11).
По линии связи одна (первая) команда управления телевизионной камерой с компьютера 4 оператора системы поступает на вход БПС 1-10, выход которого подключен к входу управления поворотом сенсорного блока, вторая команда - на турель 1-3, а третья команда - на блок наведения 1-5. Первый информационный вход блока 1-6 подключен к выходу «Видео» «кольцевого» фотоприемника 1-2, второй информационный вход блока 1-6 -к выходу генератора 1-7 электронной отметки «крест». На управляющий вход генератора 1-7 подается сигнал с датчика положения блока наведения 1-5. Выход «Видео» «кольцевого» фотоприемника 1-2 подключен также к входу селектора 1-8 синхроимпульсов, выход КСИ которого подключен к первому входу генератора 1-7 и соответственно к управляющему входу мультиплексора 1-9, выход ССИ селектора 1-8 подключен ко второму входу генератора 1-7, а выход ССП селектора 1-8- к входу внешней синхронизации матричного фотоприемника 1-4.
Мультиплексор 1-9 предназначен для синхронизации двух входных цифровых видеосигналов и объединения их на единственную линию связи путем разделения составляющих сигналов по времени. Как отмечалось выше, на мультиплексор 1-9 возложена дополнительная функция, а именно: высокочастотное модулирование цифрового телевизионного сигнала. Поэтому его выход является выходом «Видео» телевизионной камеры 1, который в стандарте высокочастотного модулированного цифрового телевизионного сигнала передается на сервер 2.
Демодулятор команд оператора (ДКО 1-11) предназначен для преобразования эфирных сигналов, поступающих с сервера 2 на телевизионную камеру 1, в логические сигналы «1» или «0», передаваемые по проводам.
Как и в прототипе [1], плата видео в сервере 2 выполняет программным путем электрическое вписывание изображения «кольцевого» кадра из оперативной памяти в «прямоугольный» растр компьютерного монитора.
Следует отметить, что в компьютерной программе применительно к операции по реализации электрического вписывания «кольцевого» кадра в «прямоугольный» растр монитора должно быть реализовано соблюдение последовательности передачи телевизионных строк.
При условии размещения вписываемого кадра в центральной части экрана монитора выполнение этой задачи представлено на фиг. 7.
Продемонстрируем заложенный в эту программы алгоритм, используя растровое положение точечных изображений от двух пикселов «А» и «В» для «кольцевого» фотоприемника 1-2.
Пусть, как показано на фиг. 2, пиксел «А» считывается первым в первой «кольцевой» строке сенсора, а пиксел «В» - точно посередине этой строки.
Тогда в «прямоугольном» растре компьютерного монитора (см. фиг. 6) изображение от пиксела «А» будет занимать положение центрального элемента его первой строки, а изображение от пиксела «В» - положение центрального элемента его последней строки.
В заявляемом решении компьютерной системы предусмотрена возможность мониторинга фрагментов «кольцевого» кадра при помощи матричного фотоприемника.
Панорамные объективы 1-1-1, 1-1-2, 1-1-3 и 1-1-4 предназначены для формирования оптических изображений кругового обзора последовательно для четырех шаровых слоев контролируемого пространства сзади, справа, спереди и слева, соответствующих направлению взгляда телевизионного оператора, как показано на фиг. 2.
В качестве технического решения для панорамных объективов 1-1, 1-2, 1-3 и 1-4, совпадающего с аналогичным решением объектив для прототипа [1], может быть предложен панорамный зеркально-линзовый объектив, конструкция которого запатентована в России отечественными специалистами из Московского государственного университета геодезии и картографии [2]. Угловое поле в пространстве предметов для этого объектива составляет 360 градусов по азимуту и может достигать (75 - 80) градусов по углу места.
Наличие пассивной (неинформативной) области в центре оптического кадра панорамного объектива, см. фиг. 10, подтверждает целесообразность выбора формы фотоприемника 1-2 в пользу кругового кольца.
«Кольцевой» фотоприемник 1-2 телевизионной камеры (см. фиг. 3) выполнен по технологии КМОП и содержит на общем кристалле «кольцевую» фотоприемную область (мишень) 1-2-1, «кольцевой» регистр 1-2-2 кадровой развертки, «кольцевой» коммутатор 1-2-3 видеосигналов и «кольцевой» мультиплексор 1-2-4.
Как показано на фиг. 3, активные пикселы на мишени фотоприемника объединены в столбцы, которые расположены вдоль радиальных направлений от воображаемого центра кругового кольца.
Каждый активный пиксел мишени (см. фиг. 4) имеет в своем составе светочувствительную область (площадь) 1-2-1-1, усилитель 1-2-1-2 с коэффициентом усиления Km для каждой текущей «кольцевой» строки и АЦП 1-2-1-3.
«Кольцевой» коммутатор 1-2-3 видеосигналов состоит из отдельных коммутаторов 1-2-3-1 видеосигнала, число которых соответствует числу активных пикселов в строке, объединенных «кольцевой» шиной видео 1-2-3-2.
Отметим, что показанная на фиг. 3 форма светочувствительной площади пиксела в виде прямоугольника, а на фиг. 4 - латинской буквы L, -являются условными. На практике электроды зарядового накопления активных пикселов мишени сенсора, совпадающие с площадью их светочувствительной площади, могут быть выполнены совершенно иначе, например, с геометрической формой в виде части кругового кольца.
Управление АЦП 1-2-1-3 пиксела, как и всех остальных пикселов мишени, осуществляется с управляющего входа «кольцевого» мультиплексора 1-2-3. передающей сигнал управления с соответствующего выхода «кольцевого» регистра 1-2-2 кадровой развертки.
Видеосигнал с выхода каждого АЦП 1-2-1-3 для каждого активного пиксела отдельного взятого «радиального» столбца передается на «радиальную» шину видео 1-2-1-5. Далее при помощи «своего» ключевого МОП-транзистора коммутатора 1-2-3-1, управляемого с одного из выходов мультиплексора 1-2-4, цифровой видеосигнал текущего пиксела передается на «кольцевую» шину видео 1-2-3-2, а затем транслируется по ней на выход «кольцевого» фотоприемника.
Отметим, что на фиг 3 пунктирные стрелки показывают управление «кольцевыми» строчными шинами 1-2-1-4 фотоприемника со стороны «кольцевого» регистра 1-2-2 кадровой развертки. То, что здесь, как и на фиг. 3, изображены лишь четыре строчные шины является условностью чертежа. На самом деле число шин 1-2-1-4 соответствует показателю действительного числа «кольцевых» строк в сенсоре. А стрелки с непрерывными линиями отмечают передачу сигнала изображения в сенсоре по «радиальным» шинам видео 1-2-1-5 в направлении к «кольцевому» коммутатору 1-2-3 видеосигналов.
В результате в «кольцевом» растре последовательно один за другим для каждого пиксела отдельно взятой «кольцевой» строки и последовательно строка за строкой для мишени в целом формируется в цифровом виде напряжение выходного видеосигнала фотоприемника.
Как и в прототипе [1], благодаря принятой для изготовления предлагаемого «кольцевого» сенсора видеосигнала технологии КМОП, обеспечивается возможность интегрировать на один общий кристалл не только фотоприемник с АЦП для каждого активного пиксела, но и блоки цифровой развертки телевизионной камеры.
Матричный фотоприемник 1-4 телевизионных камер, выполненный также по технологии КМОП, сохраняет все признаки прибора, реализованного по методу «координатная адресация» американскими специалистами в «нулевые» двухтысячные годы. Об этом сообщалось и подробно комментировалось в отечественной монографии [3, с. 67, рис. 1.21].
В той же работе [3, с. 65] отмечалось, что применение активного усилителя в пикселе позволяет осуществить в таком сенсоре режим зарядового, т.е. до коммутационного усиления видеосигнала, добиваясь величины эквивалентного преобразования «свет - сигнал» до 250 мкВ/е.
Именно этот результат явился решающей предпосылкой заявляемого решения, т.к. его можно распространить и на «кольцевой» сенсор, работающий совместно (параллельно) с матричным фотоприемником.
Очевидно, что по этой технологии на кристалле матричного фотоприемника 1-4 также реализуется задача по формированию цифрового видеосигнала «прямоугольного» растра с пониженным энергопотреблением.
К этому необходимо добавить, что «кольцевой» фотоприемник 1-2 и матричный фотоприемник 1-4 могут формировать телевизионный сигнал как монохромного (черно-белого), так и цветного изображения.
Устройство «кольцевого» фотоприемника цветного изображения было предложено в патенте РФ [4]. Отметим, что обязательный в этом решении инфракрасный светофильтр (ИК-фильтр), обеспечивающий согласование фотоприемника со спектральной чувствительностью человеческого глаза, может быть выполнен в составе панорамного объектива или интегрирован непосредственно в «кольцевой» сенсор.
Как и в прототипе [1], в заявляемом решении блок наведения 1-5 осуществляет плавное круговое пространственное перемещение мишени матричного фотоприемника 1-4 по проекции «кольцевого» изображения панорамной сцены. Электрическая схема блока 1-5 может быть реализована на базе технического решения, которое ранее было использовано в описании к патенту РФ для прототипа [1].
Рассмотрим работу блока 1-5 (см. фиг. 9), электрическая схема которого выполнена на двух оптронах HSSR, обозначенных как VT1 и VT2.
Изделие HSSR-7111 согласно [5] - однополюсный нормально разомкнутый оптрон с выходным каскадом на мощных МОП-транзисторах, имеет очень малое сопротивление во включенном состоянии и работает в точности как полупроводниковое реле. Будем считать, что управление наведением осуществляется командами в соответствии с табл.1.
Отметим, что подаваемые в телевизионную камеру с компьютера по двухпроводной линии связи сигналы управления блоком 1-5 наведения являются постоянными напряжениями положительной или отрицательной полярности.
Величина этих напряжений (5…12) вольт отсчитывается относительно провода «общий». При отсутствии команд управления данные напряжения тоже отсутствуют. Поэтому оптроны VT1 и VT2 разомкнуты, а электродвигатель М обесточен.

Пусть по линии связи на блок 1-5 наведения поступает команда «Управление поворотом» - «Вперед».
Тогда оптрон VT2 замыкается, а электродвигатель М подключается к источнику переменного напряжения ~U и начинает вращаться. Если взамен этой команды поступит команда «Управление поворотом» - «Назад», то замкнется оптрон VT1, а электродвигатель М будет вращаться в другом направлении.
Концевые выключатели SF1 и SF2 обеспечивают границы позиционирования в пределах одного кругового оборота матричного фотоприемника 1-5.
Датчик положения выполнен на базе переменного резистора RPn, имеющего линейную зависимость изменения сопротивления от угла поворота, а постоянный резистор Rn* служит для реализации настроечной работы по точному позиционированию. Движок резистора KPn кинематическим методом (через редуктор) связан с двигателем М.
Отметим, что сигнал датчика положения (напряжение Un с потенциометра RPn), подается на управляющий вход генератора 1-7 электронной отметки «крест», обеспечивая перемещение маркера на «кольцевом» изображении в соответствии с командами, поступающими с блока наведения 1-5.
Электромеханическая турель 1-3, управляемая оператором компьютера 4, имеет два рабочих положения, которые разнесены относительно друг друга на 180°. Техническое решение турели 1-3 может быть реализовано, как и в прототипе [1], на базе электродвигателя.
Блок позиционирования сенсоров (БПС 1-10) выполнен на базе шагового двигателя, который представляет собой электрическую машину, предназначенную для преобразования электрической энергии в механическую энергию, см. например, монографию [6, с. 95] и публикацию в интернете [7]. Конструктивно шаговый двигатель состоит из обмоток статора и магнитно мягкого или магнитно твердого ротора.
Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Очевидно, что при конструктивной необходимости шаговый двигатель может быть оснащен редуктором.
Принцип действия шагового двигателя, применяемого в БПС 1-10 заявляемого устройства показан на фиг. 11. На этом чертеже изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроена так, что они находятся под углом 90° относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90°.
В момент подачи высокого уровня импульсного напряжения U1 в первую обмотку происходит перемещение ротора на эти 90°. В случае поочередной подачи высокого уровня импульсного напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки статора шагового двигателя.
Для подачи потенциала на обмотки на обмотки шагового двигателя необходим механизм, способный выдать или группу импульсов в конкретной последовательности. В роли такого механизма выступает блока управления шаговым двигателем, который содержит драйвер на основе микропроцессора, а также контроллер, обеспечивающий непосредственное подключение цифровых сигналов к данному двигателю.
Очевидно, что в заявляемом устройстве компьютерной системы панорамного телевизионного наблюдения БПС 1-10 содержит последовательно соединенные между собой шаговый двигатель, обеспечивающий четыре фиксированных положения вала под углом 90°, и блок управления шаговым двигателем, вход которого подключен через USB интерфейс к внешнему блоку цифрового управления от компьютера 4.
Все сигнальные операции в заявляемом техническом решении выполняются в соответствии с прикладной компьютерной программой.
Она является неотъемлемой частью разработки данной компьютерно-телевизионной системы.
Характеристика сигналов управления, сопутствующих команде «Выбор режима видео», представлена в табл. 2.

Очевидно, что подача всех сигналов управления осуществляется с клавиатуры компьютера 4 и/или помощи ее компьютерной мыши.
Добавим, что команда «Выбор режима видео» распространяется в пределах компьютера, а поэтому является командой внутреннего пользования. Команда «Управление наведением» - внешняя команда, т.к. она предназначена для управления работой телевизионной камеры.
Необходимо отметить, что сигнал «окошко» может определять всю растровую зону выбираемого фрагмента изображения или быть ее меньше, но геометрические центры этих областей всегда совпадают.
Заявляемое устройство компьютерной системы панорамного телевизионного наблюдения с селективным масштабированием изображения для беспилотного летательного аппарата работает следующим образом.
Пусть телевизионная камера 1, установленная, например, на гексакоптере, расположена на некоторой высоте относительно Земли.
Будем считать, что линии связи телевизионной камеры 1 с сервером 2 компьютера 4 по видеосигналу и командному управлению реализованы в стандарте ШЕЕ 802/11 для беспроводных сетей [см.8, с. 380-381.
Это означает, что передача данных осуществляется на одной из двух скоростей (1 или 2 Мбит/с) в полосе частот 2,4 ГГц.
Пусть решение сенсорного блока в составе телевизионной камеры 1, см. фиг. 1 и фиг2, реализовано так, что в исходном положении ось визирования первого панорамного объектива 1-1-1, а, следовательно, и оптическая ось фотоприемника 1-2 направлена по горизонтали сзади.
Отметим, что мишень фотоприемника 1-2 занимает в данной ситуации положение, которое показано линиями из квадратных точек.
При ее включении компьютерной системы она начинает действовать по умолчанию в режиме 1, а в компьютере 4 формируется сигнал логической «1» для команды «Выбор режима видео» - «Кольцевое» изображение и выбор интересующего в нем фрагмента».
Поэтому на экране монитора оператора будет воспроизводиться изображение «Видео » с «наложенной» на него отметкой «крест».
Напомним, что «кольцевое» положение электронной отметки «крест» в пределах растра фотоприемника 1-2 определяется в зависимости от положения движка потенциометра RPn, установленного в блоке наведения 1-5.
«Крест» отмечает на изображении зону повышенного интереса оператора, а он, подавая с компьютера 4 в телекамеру 1 команду «Управление поворотом» - «Вперед», «Назад», может дистанционно установить эту отметку в пределах ее полного кругового перемещения.
Здесь также должно быть учтено, что наша электронная отметка «крест» при наведении на выбранный объект априори располагается точно в середине «кольцевого» изображения по его ширине (см. фиг. .8, слева).
Одновременно матричный фотоприемник 1-4 формирует видеосигнал оптически увеличенного изображения выбранного объекта, которое является базовым при создании необходимого изображения «окошка».
Далее выходные видеосигналы сенсорного блока объединяются на одну линию, чередуясь с периодом кадров Tk.
А полученный мультиплексный цифровой телевизионный сигнал (мультиплексный ЦТС) затем подвергается высокочастотному модулированию и поступает на выход телевизионной камеры.
Далее этот ЦТС по беспроводной сети передается на сервер 2, где (на плате видео) выполняется его демодулирование и демультиплексирование на два канала с последующей записью видеоинформации каждого канала соответственно в первый и второй блоки оперативной памяти на кадр.
Далее оператор переводит телевизионную систему в режим 2 работы и может контролировать комбинированное изображение, которое формируется «кольцевым» фотоприемником 1-2 и одновременно матричным сенсором 1-4 при его текущем местоположении.
Для того чтобы коммутация режимов работы системы происходила без внесения искажений в наблюдаемые изображения, фотоприемники телевизионной камеры работают в режиме Genlock, который обеспечивается путем подачи на вход внешней синхронизации матричного сенсора 1-4 сигнала синхронизации приемника (ССП) от «кольцевого» сенсора 1-2.
Отметим, что в плате видео сервера 2 изображение комбинированного изображения целесообразно выводить на центральную часть экрана компьютерного монитора.
В нем изображение «окошка» (см. фиг. 8, справа) занимает центральное положение внутри свободной зоны «кольцевого» изображения.
Эта рекомендация диктуется созданием необходимых эргономических условий для работы оператора компьютера 4 и пользователей компьютеров 3.
Наличие же свободной зоны в центральной части кольцевого изображения (см. фиг. 10) является важной для этого предпосылкой.
Селективное масштабирование изображения в заявляемом решении обеспечивает не только увеличение геометрических размеров выбранного фрагмента панорамного телевизионного изображения, но и выигрыш в его разрешающей способности.
Если число светочувствительных пикселов в строке матричного фотоприемника 1-4 равно числу пикселов для «кольцевой» строки сенсора 1-2, то получаемый выигрыш в разрешающей способности) этого фрагмента панорамного изображения будет соответствовать этому отношению.
Благодаря выравниванию в телевизионной камере чувствительностей «кольцевого» и матричного фотоприемников, этот выигрыш достигается без потерь показателя отношение сигнал/шум наблюдаемого изображения.
После завершения записи этого изображения в блок оперативной памяти сервера 2 оно также становится доступным для всех пользователей компьютеров 3.
Аналогично выполняется и задача панорамного наблюдения и в остальных шаровых слоях окружающего пространства.
Для получения в телевизионной камере 1 мультиплексного ЦТС применительно к трем другим шаровым слоям (без посадки гексакоптера на Землю) оператору достаточно подавать с компьютера 4 необходимые команды, обеспечивающие последовательно поворот сенсорного блока, а, следовательно, и фотоприемника 1-2, (по часовой стрелке) на угол 90° при помощи шагового двигателя БПС 1-10.
В результате мишень «кольцевого» фотоприемника 1-2 (см. фиг. .2) сначала оказывается в положении 2 напротив второго панорамного объектива 1-1-2, затем в положении 3 - напротив третьего панорамного объектива 1-1-3, а в завершении цикла - напротив четвертого панорамного объектива 1-1-4.
Как и первый ЦТС, каждый из трех новых ЦТС последовательно будет также подвергаться записи в блок оперативной памяти сервера 2.
В настоящее время все блоки заявляемого решения устройства компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата освоены или могут быть освоены отечественной промышленностью.
Поэтому следует считать предполагаемое изобретение соответствующим требованию о промышленной применимости.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2787358. МПК H04N 7/18. Устройство компьютерной системы панорамного телевизионного наблюдения с селективным масштабированием изображения (варианты). / В.М. Смелков // Б.И. - 2023. -№1.
2. Патент РФ №2185645. МПК G02B 13/06, G02B 17/08. Панорамный зеркально-линзовый объектив. / А.В. Куртов, В.А. Соломатин // Б.И. - 2002. -№20.
3. Березин В.В., Умбиталиев А.А., Фахми Ш.С., Цыцулин А.К. и Шипилов Н.Н. Твердотельная революция в телевидении: Телевизионные системы на основе приборов с зарядовой связью, систем на кристалле и видеосистем на кристалле. Под ред. А.А. Умбиталиева и А.К. Цыцулина. -М.: «Радио и связь», 2006.
4. Патент РФ №2710779. МПК H04N 5/374. Устройство «кольцевого» фотоприемника цветного изображения для панорамного телевизионно-компьютерного наблюдения. / В.М. Смелков // Б.И. - 2019 - №2.
5. www.avagotech.com.
6. Гинзбург С.А., Лехтман И.Я., Малов B.C. Основы автоматики и телемеханики. Под общ. ред. С.А. Гинзбурга. Изд. 4-е переработанное. Пер. с англ. - «Энергия», 1968.
7. https//www.asutpp.ru/shagovyy-dvigatel.html.
8. Владо Дамьяновски. ССТУ. Библия видеонаблюдения. Цифровые и сетевые технологии. Издание 2-. Пер. с англ. 000»Ай-Эс -ЭС Пресс». 2006.









Изобретение относится к панорамному телевизионному наблюдению, которое выполняется компьютерной системой при помощи телевизионной камеры, обеспечивающей последовательно и параллельно круговой обзор в четырех шаровых слоях окружающей сферической области пространства. При этом для каждого из этих шаровых слоев телевизионный контроль ситуации в реальном масштабе времени осуществляется в пространственном угле 360 градусов по азимуту и десятки градусов по углу места. Телевизионная камера такой системы имеет два сенсора: «кольцевой» и «прямоугольный» (матричный) фотоприемники, изготовленные по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП). На экране компьютерного монитора воспроизводится комбинированное изображение, которое по отношению к первоначально предъявляемому изображению состоит из априори выбранного участка с необходимым увеличением (масштабированием) и остальной его части с неизменным масштабом. Технический результат – возможность ведения мониторинга панорамного сюжета в четырех слоях окружающего пространства. 3 з.п. ф-лы, 11 ил., 2 табл.
1. Устройство компьютерной системы панорамного телевизионного наблюдения для беспилотного летательного аппарата, содержащее последовательно соединенные телевизионную камеру и сервер, являющийся узлом локальной вычислительной сети, к которому подключены два или более персональных компьютера, при этом в разъем расширения на материнской плате сервера установлена плата видео, согласованная по каналам ввода/вывода, управлению и питанию с шиной сервера, содержащая блок электрического вписывания изображения (БЭВИ), который осуществляет программным путем вложение (вставку) «кольцевого» кадра телевизионной камеры в «прямоугольный» растр компьютерного монитора, причем в режиме наблюдения панорамного сюжета полностью вход БЭВИ подключен к выходу блока оперативной памяти на кадр, а выход БЭВИ - к выходу «сеть» сервера; при этом в состав телевизионной камеры входит первый панорамный объектив, сенсорный блок, смеситель, генератор электронной отметки «крест», селектор синхроимпульсов и мультиплексор, причем сенсорный блок содержит в своем составе электромеханическую турель с поворотом на два положения, управляемую по команде с компьютера оператора системы, при этом на турели на регулируемом по высоте фланце расположен «кольцевой» фотоприемник и с разнесением на 180° - блок наведения, который по команде оператора с компьютера осуществляет в пределах круга плавное пространственное перемещение установленного на нем на регулируемом по высоте фланце «прямоугольного» (матричного) фотоприемника, причем в первом положении турели оптическое изображение панорамного объектива проецируется на мишень «кольцевого» фотоприемника, а во втором положении турели фрагмент оптического кадра панорамного объектива проецируется на мишень матричного фотоприемника, при этом «кольцевой» фотоприемник выполнен на кристалле, изготовленном по технологии комплементарных структур «металл-окисел-полупроводник» (КМОП), и содержит на мишени линейки светочувствительных элементов (пикселов), расположенных вдоль радиальных направлений от воображаемого центра кругового кольца к его внешней периферии, причем число светочувствительных пикселов в каждой «кольцевой» строке мишени одинаково, а их площадь (Δ) от строки к строке различна, увеличиваясь по мере движения к внешней периферии сенсора, причем мишень сенсора состоит из фотодиодных активных пикселов, каждый из которых имеет усилитель с коэффициентом усиления Km, а также встроенный аналого-цифровой преобразователь (АЦП), обеспечивающий передачу видеосигнала активного пиксела на свою «радиальную» шину видео, при этом все они в совокупности объединяют активные пикселы мишени в «радиальные» столбцы, причем управление АЦП для пикселов, расположенных вдоль каждой «кольцевой» строки сенсора, осуществляется при помощи отдельно взятой «кольцевой» строчной шины, общее количество которых определяет число строк в сенсоре, а количество «радиальных» шин видео - число пикселов в каждой строке сенсора; при этом на общем кристалле фотоприемника размещаются и блоки, выполняющие развертку и формирование выходного напряжения цифрового видеосигнала, а именно: «кольцевой» регистр кадровой развертки, осуществляющий выбор «кольцевой» строки; «кольцевой» коммутатор видеосигналов, содержащий коммутаторы видеосигнала для каждого «радиального» столбца, которые управляются с соответствующего выхода «кольцевого» мультиплексора строчной развертки и обеспечивают передачу видеосигнала на выходе каждой «радиальной» шины видео на «кольцевую» шину видео, выход которой является выходом «Видео» «кольцевого» фотоприемника, причем коэффициент усиления Km активного пиксела для каждой текущей «кольцевой» строки «кольцевого» сенсора изменяется по соотношению:

где K1 - коэффициент усиления активного пиксела первой строки «кольцевого» фотоприемника, величина показателя которого равна единице;
Δ1 и Δm - соответственно светочувствительная площадь активного пиксела для первой и текущей строки считывания в «кольцевом» сенсоре, а изменение коэффициента усиления Km активного пиксела для каждой текущей «кольцевой» строки сенсора обеспечивает одинаковую величину считывающей апертуры в пределах всего «кольцевого» растра изображения, при этом матричный фотоприемник, как и «кольцевой» сенсор, выполнен по технологии КМОП с аналогичной организацией по методу «координатная адресация», причем число его «прямоугольных» строк равно числу «кольцевых» строк у «кольцевого» сенсора, а при одинаковой светочувствительной площади (Δ) всех активных пикселов мишени коэффициент усиления Km активного пиксела для каждой текущей «прямоугольной»» строки мишени матричного сенсора сохраняется постоянным и неизменным по величине, а для выравнивания чувствительностей «кольцевого» и матричного каналов должна быть увеличена в Δ1/Δ раз величина номинального коэффициента Km активного пиксела матричного сенсора; первый информационный вход смесителя подключен к выходу «Видео» «кольцевого» фотоприемника, а второй информационный вход смесителя - к выходу сигнала генератора электронной отметки «крест», а выход смесителя - к первому информационному входу мультиплексора, второй информационный вход которого подключен к выходу «Видео» матричного фотоприемника; управляющий вход генератора электронной отметки «крест» подключен к выходу датчика положения блока наведения, а выход «Видео» «кольцевого» фотоприемника подключен дополнительно к входу селектора синхроимпульсов, выход кадровых синхроимпульсов (КСИ) которого подключен к первому входу генератора электронной отметки «крест» и соответственно к управляющему входу мультиплексора, выход строчных синхроимпульсов (ССИ) селектора синхроимпульсов - ко второму входу генератора электронной отметки; а выход смеси синхроимпульсов приемника (ССП) селектора синхроимпульсов - к входу внешней синхронизации матричного фотоприемника, выход «Видео» которого подключен ко второму информационному входу мультиплексора, выход которого является выходом «Видео» телевизионной камеры, первый управляющий вход телевизионной камеры подключен к входу управления ее сенсорного блока, второй управляющий вход телевизионной камеры - к входу управления ее турели, а третий управляющий вход телевизионной камеры - к входу управления ее блока наведения, при этом плата видео, установленная в разъем расширения на материнской плате сервера, выполняет демультиплексирование входного мультиплексного сигнала изображения «Видео» на два канала «Видео 1» и «Видео 2» с последующей записью видеосигналов соответственно в первый и второй блоки оперативной памяти на кадр, формирования сигнала «окошко», выполнения коммутации видеосигналов «Видео 1» и «Видео 2» по сигналу «окошко» с формированием комбинированного изображения, выход которого является выходом видеосигнала телевизионной системы, отличающееся тем, что в состав телевизионной камеры введен второй панорамный объектив, третий панорамный объектив и четвертый панорамный объектив, а также демодулятор высокочастотных управляющих команд оператора системы (ДКО), транслируемых по беспроводной линии связи от сервера на телевизионную камеру, и блок позиционирования сенсоров (БПС), выполненный на базе шагового двигателя, вал которого непосредственно или через редуктор механически связан с сенсорным блоком, обеспечивая по команде оператора, поступающей с компьютера в телевизионную камеру, пространственный поворот сенсорного блока на угол 90° в пошаговом режиме четыре раз за цикл, так что его мишень, установленная по умолчанию симметрично в положение напротив первого панорамного объектива, последовательно устанавливается сначала симметрично в положение напротив второго панорамного объектива, затем симметрично в положение напротив третьего панорамного объектива, а в заключение - симметрично в положение напротив четвертого панорамного объектива, при этом первый, второй и третий управляющие входы телевизионной камеры подключены соответственно к первому, второму и третьему входам управления ДКО, первый выход которого через БПС подключен к входу управления сенсорного блока, а второй и третий выходы ДКО - соответственно к входам управления турели и блока наведения, причем мультиплексор видеосигнала телевизионной камеры выполняет дополнительно высокочастотное модулирование цифрового телевизионного сигнала для осуществления его беспроводной передачи на сервер, при этом новый цифровой видеосигнал, формируемый в телевизионной камере после завершения каждого из четырех поворотов фотоприемника, поочередно подается на сервер, в качестве которого используется системный блок компьютера оператора системы.
2. Устройство компьютерной системы панорамного телевизионного наблюдения по п. 1, отличающееся тем, что «кольцевой» и матричный фотоприемники телевизионной камеры являются датчиками монохромного или цветного телевизионного сигнала.
3. Устройство компьютерной системы панорамного телевизионного наблюдения по п. 1, отличающееся тем, что в «кольцевом» фотоприемнике телевизионной камеры электроды зарядового накопления активных пикселов мишени сенсора, совпадающие с площадью их светочувствительной площади, выполнены с геометрической формой в виде части кругового кольца.
4. Устройство компьютерной системы панорамного телевизионного наблюдения по п. 1, отличающееся тем, что в плате видео сервера изображение комбинированного изображения выводится на центральную часть компьютерного монитора, в котором изображение «окошка» занимает центральное положение внутри свободной зоны «кольцевого» изображения.
| Устройство компьютерной системы панорамного телевизионного наблюдения | 2021 |
|
RU2774399C1 |
| Устройство "кольцевого" фотоприёмника цветного изображения для панорамного телевизионно-компьютерного наблюдения | 2019 |
|
RU2710779C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОКАНАЛЬНОЙ ВИДЕОЗАПИСИ | 2020 |
|
RU2789447C1 |
| WO 2021109936 A1, 10.06.2021. | |||
