Изобретение относится к контрольно-измерительной технике в оптико-электронном приборостроении, а именно, к устройствам создания изображения движущейся цели, и предназначено для контроля работы тепловизионных приборов в режимах поиска, захвата и сопровождения цели.
Известен имитатор движущейся цели (Патент на изобретение RU 2222034, МПК G02B 27/30, 2014), выполненный в виде коллиматора, содержащего объектив, тест-объект (сменные миры), подсвечиваемый электролампой - узлом подсветки излучением в видимом диапазоне длин волн и расположенный в центре картинной плоскости, совпадающей с фокальной плоскостью объектива, а также неподвижное и подвижное зеркала, при этом подвижное зеркало коллиматора закреплено в карданном подвесе с двумя взаимно перпендикулярными осями так, что плоскость осей карданного подвеса совпадает с поверхностью подвижного зеркала, а визирная ось проходит через точку пересечения осей карданного подвеса, причем размер зоны картинной плоскости, изображение которой формируется в поле зрения неподвижно закрепленного проверяемого изделия, в два раза превышает размер линейного поля зрения объектива.
Недостатком данного устройства является невозможность его использования в качестве инфракрасного устройства для имитации удаляющейся или приближающейся с заданной скоростью по определенной траектории цели.
Известен стенд измерения параметров тепловизионных каналов (Патент на изобретение RU 2686255, МПК G01M 11/02, H04N 5/33, G01J 5/10, 2018), содержащий инфракрасный коллиматор, снабженный фоновым излучателем, тест-объектом (сменными мирами), устройство управления, а также поворотно-наклонное устройство перемещения контролируемого тепловизионного прибора относительно тест-объекта.
Данный стенд позволяет автоматически проводить измерение параметров тепловизионных приборов по полю зрения (по полю матрицы фотоприемного устройства (ФПУ) контролируемого тепловизионного прибора) таких, как изменение пространственного разрешения, изменение температурного разрешения, изменение температурно-частотной характеристики путем последовательной автоматической установки изображения тест-объекта, формируемого инфракрасным коллиматором, в требуемые точки матрицы ФПУ контролируемого тепловизионного прибора и проведения в каждой из выбранных точек ряда операций, а именно:
- автоматической последовательной смены мир, имеющих разные размеры;
- последовательной установки для каждой из установленных в рабочее положение мир ряда разных уровней контрастного излучения (ΔM) с последующим расчетом температурно-частотной характеристики и т.д.
Кроме того, стенд позволяет автоматически измерять параметры тепловизионных приборов, при которых необходимо выполнять изменение и измерение значений углов поворота и наклона оптической оси тепловизионного прибора относительно оптической оси инфракрасного коллиматора, размер угловых полей зрения, угол отклонения оси визирования относительно посадочной плоскости тепловизионного прибора и т.д.
К недостатку данного стенда можно отнести высокую погрешность измерения характеристик (погрешность аппроксимации), связанную с ограниченным количеством сменных мир (обычно 5…6), большое время смены мир, так как для смены мир используется, как правило, револьверный механизм, что значительно замедляет измерение всех характеристик, а также высокую погрешность установки в заданное положение на матрице ФПУ изображения тест-объекта, что связано с использованием в таких системах, как правило, шаговых двигателей, обеспечивающих лишь дискретное перемещение с определенным шагом (порядка одного углового градуса).
Достижение более высокой (порядка одной угловой минуты) точности позиционирования и перемещения, близкого к плавному, возможно при использовании шаговых двигателей, например, AD-200-31, в режиме деления шага (микрошаговый режим), обеспечивающем фиксацию вала двигателя в промежуточных положениях между шагами (смещение на величину микрошага), либо, для достижения еще большей (единицы угловых секунд) точности и действительно плавного перемещения, использование моментных двигателей, например, индукционных моментных двигателей типа МД. В обоих последних случаях необходимо применение специализированных контроллеров управления двигателями, например, 8SMC5-USB-B9-2. Кроме того, в тех стендах, где требуется плавное движение по заданной траектории, необходимы высокопроизводительные блоки управления, оперативно рассчитывающие и подающие на вход контроллеров требуемые в каждый момент времени для обеспечения движения по заданной траектории сигналы управления контроллерами, например, блоки управления, выполненные на мощном процессоре TMS320DM648ZUTD9.
Прототипом является инфракрасный коллиматор (Патент на изобретение RU 2779741, МПК G02B 27/30, G01M 11/02, 2022 г.), содержащий объектив, узел мир, размещенный в фокальной плоскости коллиматора перед фоновым излучателем, снабженным исполнительным элементом, измеритель температуры узла мир, измеритель разности температур между фоновым излучателем и узлом мир, первый блок управления, первый выход которого подключен к блоку вычислительному, при этом узел мир выполнен с возможностью формирования тест-объекта с регулируемым размером и состоит из двух мир, каждая из которых имеет привод и датчик перемещения, а блок вычислительный связан с измерителем температуры узла мир, измерителем разности температур между фоновым излучателем и узлом мир, исполнительным элементом фонового излучателя, приводами и датчиком перемещения каждой из мир.
Данный инфракрасный коллиматор является инфракрасным имитатором удаляющейся (приближающейся) с заданной скоростью цели, то есть имитатором одномерного перемещения цели за счет возможности с заданной скоростью одновременно плавно изменять на оптическом выходе инфракрасного коллиматора значение ΔM и размер тест-объекта.
Такое одномерное перемещение изображения тест-объекта в общем случае недостаточно для имитации движения цели.
Основным недостатком данного инфракрасного имитатора движущейся цели является невозможность имитации трехмерного перемещения цели с заданной скоростью, когда у формируемого инфракрасным коллиматором на матрице ФПУ контролируемого тепловизионного прибора изображения тест-объекта одновременно, (плавно, с определенной скоростью для каждого из параметров) изменяется значение ΔM, размер изображения тест-объекта и положение изображения тест-объекта в пределах всей матрицы ФПУ, что необходимо, например, для контроля работы тепловизионных приборов в режиме поиска, захвата и сопровождения цели, приближающейся или удаляющейся с определенной скоростью по заданной траектории.
Решаемая задача - создание инфракрасного имитатора движущейся цели для контроля работы тепловизионных приборов в режиме поиска, захвата и сопровождения цели.
Техническим результатом изобретения является имитация трехмерного перемещения цели с заданной скоростью за счет обеспечения возможности автоматического одновременного плавного изменения с требуемыми скоростями значений ΔM, размера изображения тест-объекта инфракрасного коллиматора и положения изображения тест-объекта инфракрасного коллиматора на матрице ФПУ контролируемого тепловизионного прибора.
Технический результат достигается тем, что в инфракрасный имитатор движущейся цели, содержащий инфракрасный коллиматор, состоящий из объектива, узла мир, размещенного в фокальной плоскости коллиматора перед фоновым излучателем, снабженным исполнительным элементом, измерителя температуры узла мир, измерителя разности температур между фоновым излучателем и узлом мир, первого блока управления, первый выход которого подключен к блоку вычислительному, при этом узел мир выполнен с возможностью формирования тест-объекта с регулируемым размером и состоит из двух мир, каждая из которых имеет привод и датчик перемещения, а блок вычислительный связан с измерителем температуры узла мир, измерителем разности температур между фоновым излучателем и узлом мир, исполнительным элементом фонового излучателя, приводами и датчиками перемещения каждой из мир, согласно настоящему изобретению, дополнительно введено устройство поворотно-наклонное, выполненное с возможностью фиксации в нем контролируемого тепловизионного прибора, снабженное приводами углового перемещения и датчиками положения, подключенными через контроллер ко второму блоку управления, который через устройство временнОго согласования подключен ко второму выходу первого блока управления.
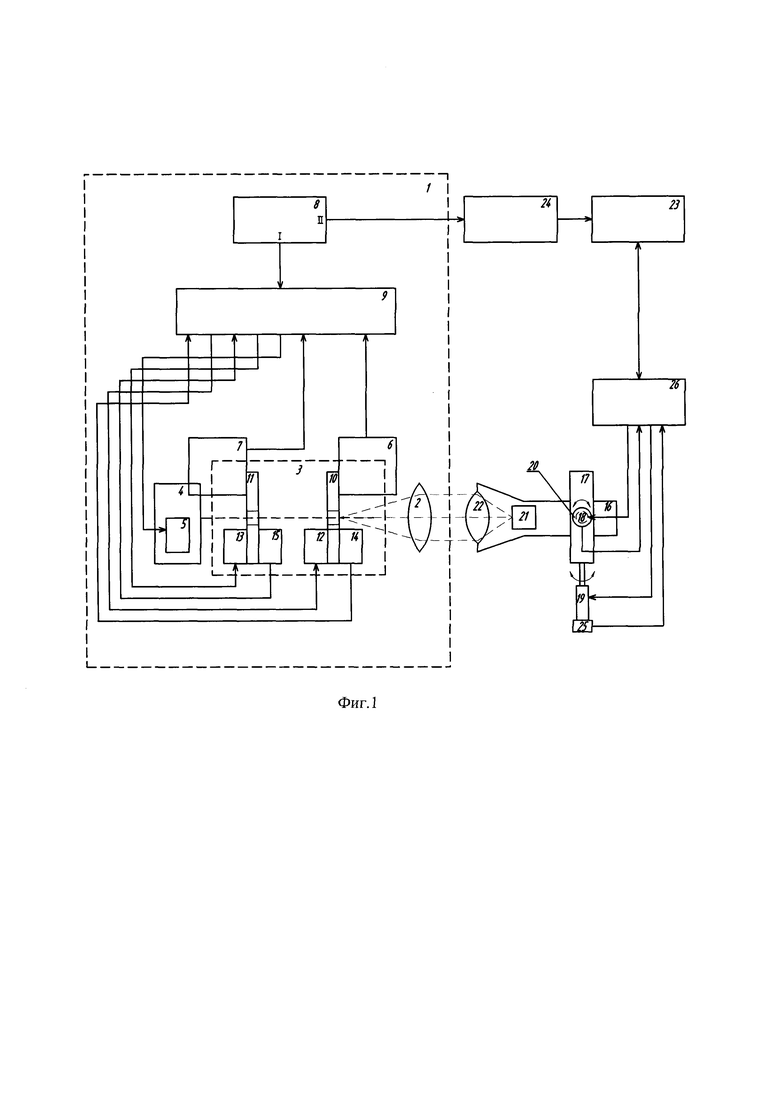
На фиг. 1 представлена функциональная схема предлагаемого инфракрасного имитатора движущейся цели.
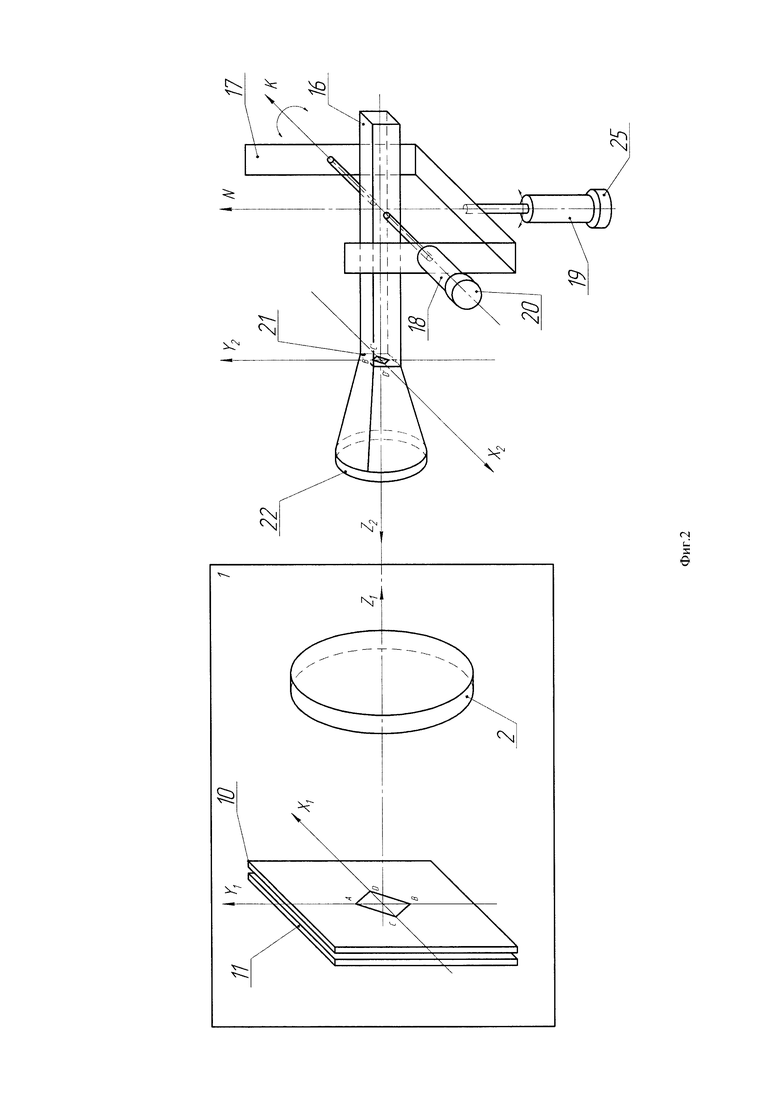
На фиг. 2 изображен имитатор движущейся цели с инфракрасным коллиматором и устройством поворотно-наклонным, держатель которого с размещенным на нем контролируемым тепловизионным прибором установлен в исходное положение.
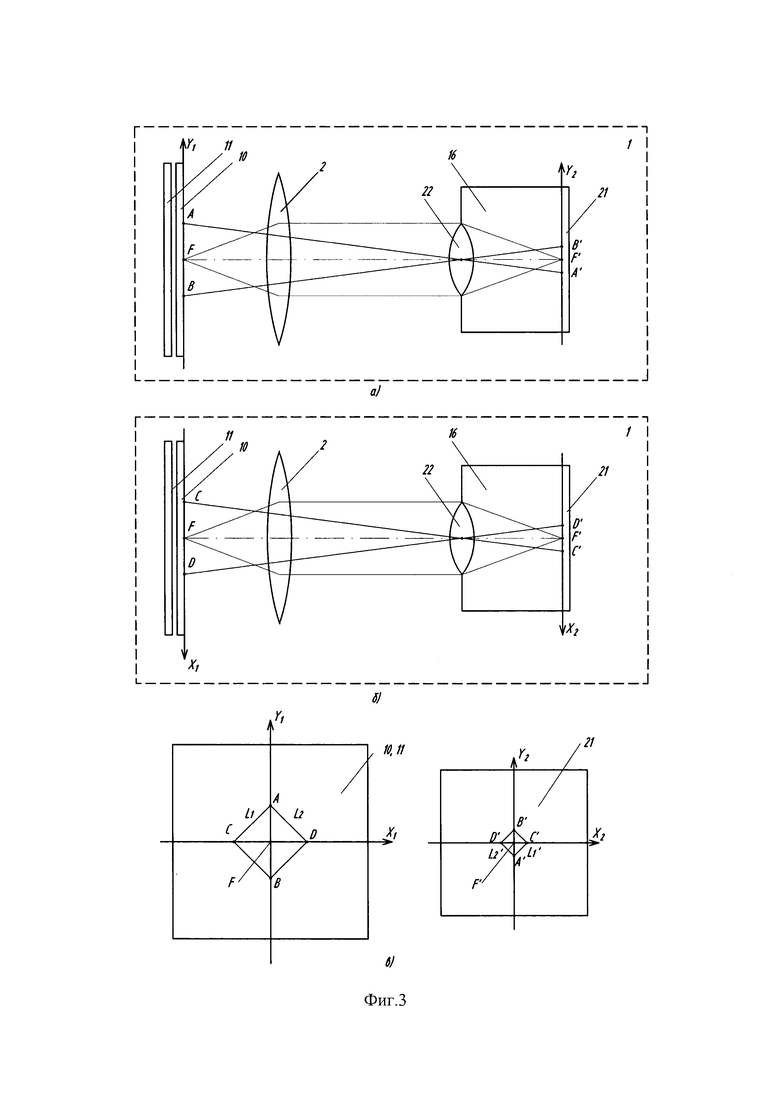
На фиг. 3а, 3б и 3в схематично представлено формирование изображения A'-B'-C'-D' тест-объекта инфракрасного коллиматора на матрице ФПУ в исходном положении держателя.
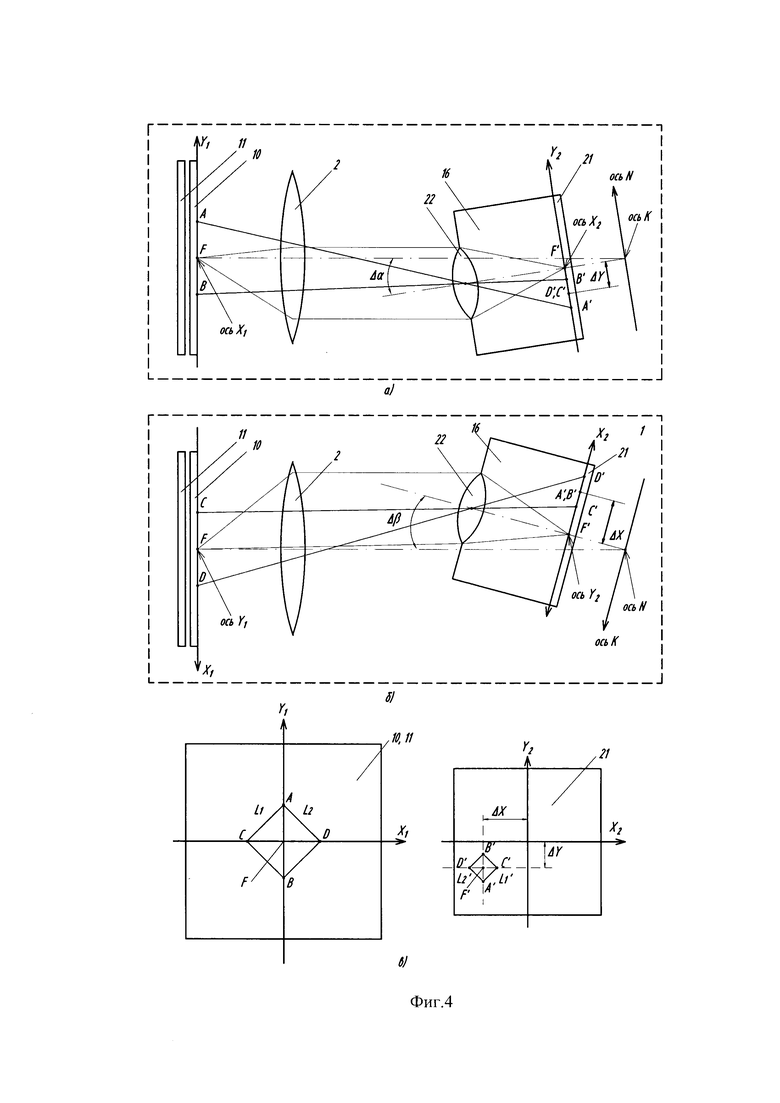
На фиг. 4а, 4б и 4в схематично представлено формирование изображения A'-B'-C'-D' тест-объекта и его перемещение, относительно исходного положения, на величины ΔY и ΔХ при угловом перемещении контролируемого тепловизионного прибора, соответственно на углы Δϕ и Δβ.
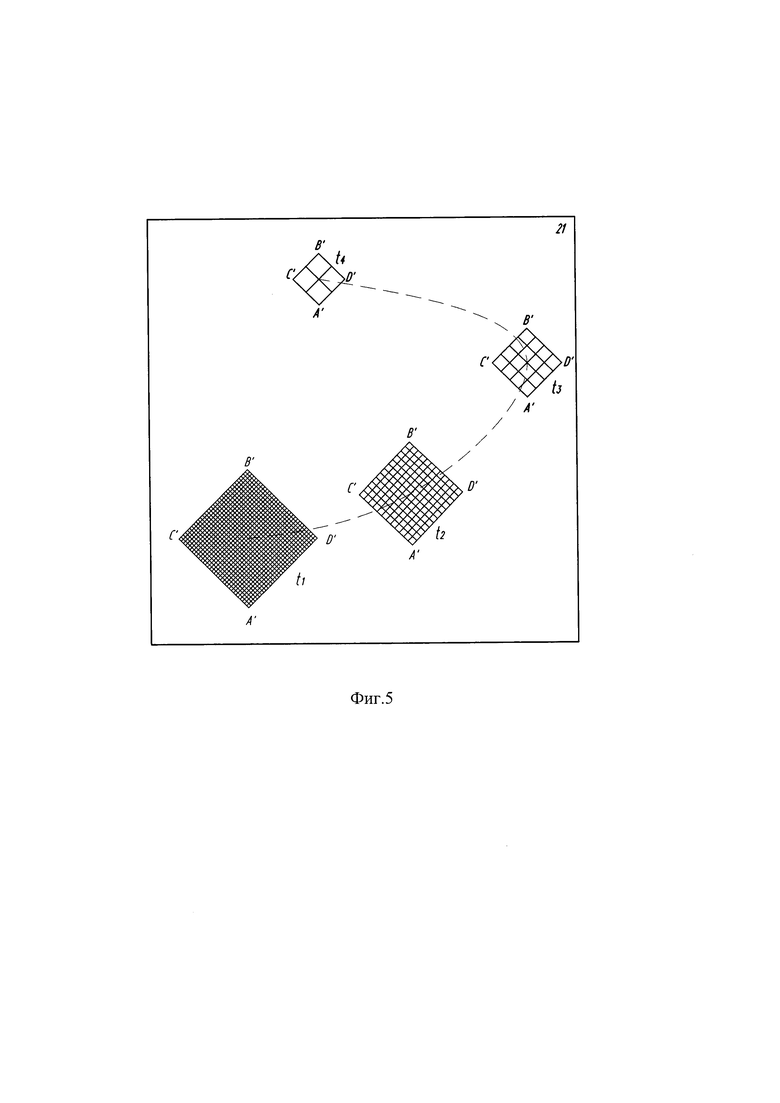
На фиг. 5 схематично представлено движение (удаление) по заданной траектории по матрице ФПУ изображения цели (тест-объекта) с возрастающей скоростью. Показано расположение на матрице изображения тест-объектов через равные интервалы времени. Плотность штриховки изображения тест-объекта пропорциональна величине ΔM. В каждый момент времени на матрице ФПУ располагается лишь одно изображение тест-объекта. В момент t1 - самое большое, в момент t4 - самое маленькое.
Инфракрасный имитатор движущейся цели содержит инфракрасный коллиматор 1, состоящий из объектива 2, узла 3 мир, размещенного в фокальной плоскости коллиматора 1 перед фоновым излучателем 4, снабженным исполнительным элементом 5, измерителя 6 температуры узла 3 мир, измерителя 7 разности температур между фоновым излучателем 4 и узлом 3 мир, первого блока 8 управления, первый выход которого подключен к блоку 9 вычислительному. Узел 3 мир состоит из двух мир 10 и 11, каждая из которых имеет привод соответственно 12 и 13 и датчик соответственно 14 и 15 перемещения. Устройство поворотно-наклонное выполнено с возможностью фиксации в нем контролируемого тепловизионного прибора 16 (например, с помощью держателя 17 на фиг. 1, 2), снабжено приводами 18 и 19 углового перемещения и датчиками 20 и 25 положения, подключенными через контроллер 26 ко второму блоку 23 управления, который через устройство 24 временнОго согласования подключен ко второму выходу первого блока 8 управления.
Закрепленный на держателе 17 контролируемый тепловизионный прибор 16 содержит матрицу 21 ФПУ и объектив 22.
Устройство поворотно-наклонное до начала работы устанавливается так, чтобы оси X1 и Y1 тест-объекта A-B-C-D инфракрасного коллиматора 1 и оси Х2 и Y2 матрицы 21 контролируемого тепловизионного прибора 16 были параллельны, а оси Z1 и Z2 тест-объекта A-B-C-D и матрицы 21 совпадали (исходное положение приведено на фиг. 3).
В исходном положении центр F' изображения A'-B'-C'-D' тест-объекта инфракрасного коллиматора 1 (точка пересечения линий А'-В' и C'-D') находится в центре матрицы 21 ФПУ и совпадает с фокусом объектива 22 контролируемого тепловизионного прибора 16, то есть точкой F' (точка F на фиг. 3 - 4 - фокус объектива 2 инфракрасного коллиматора 1).
Использование приводов 18 и 19 углового перемещения контролируемого тепловизионного прибора 16 относительно двух взаимно перпендикулярных осей поворота N и К его держателя 17, выполненных, например, на шаговых или моментных двигателях, позволяет изменять положение изображения A'-B'-C'-D' тест-объекта инфракрасного коллиматора 1 на матрице 21 ФПУ контролируемого тепловизионного прибора 16.
При известных оптических характеристиках контролируемого тепловизионного прибора 16 и инфракрасного коллиматора 1, известных параметрах крепления тепловизионного прибора 16 на держателе 17 можно расчетным или эмпирическим путем определить зависимость между углом перемещения (поворота) осей приводов 18 и 19 углового перемещения (Δα и Δβ) и вертикальным и горизонтальным перемещением (ΔY и ΔХ) относительно исходного положения изображения A'-B'-C'-D' тест-объекта инфракрасного коллиматора 1 на матрице 21 контролируемого тепловизионного прибора 16:
Δα=f1(ΔY),
Δβ=f2(ΔХ).
Также по известным оптическим характеристикам инфракрасного коллиматора 1 и контролируемого тепловизионного прибора 16 расчетным или эмпирическим путем можно определить зависимость между размером L1 (L2) стороны четырехугольного тест-объекта A-B-C-D инфракрасного коллиматора 1, значением ДМ на выходе инфракрасного коллиматора 1 (ΔМ - уровень контрастного излучения) и размером L1' изображения и значением ΔМ' на матрице 21 контролируемого тепловизионного прибора 16:
L1=f3(L1');
ΔM=f4(ΔМ').
Работает инфракрасный имитатор движущейся цели следующим образом.
Для одновременного автоматического поддержания требуемой величины ΔМ' и автоматической установки требуемых размеров L1 (L2') изображения тест-объекта, автоматического перемещения изображения A'-B'-C'-D' тест-объекта относительно начала координат (точки пересечения осей Х2 и Y2) матрицы 21 контролируемого тепловизионного прибора 16, оператор вводит в первый блок 8 управления инфракрасным коллиматором требуемые значения ΔМ', L1' (L2') и значения ΔХ и ΔY во второй блок 23 управления.
Первый блок 8 управления по заранее введенным в него зависимостям L1=f3(L1'), ΔМ=f4(ΔМ') и второй блок 23 управления по заранее введенным в него зависимостям Δα=f1(ΔY) и Δβ=f2(ΔХ) вычисляют соответствующие требуемые значения Δα, Δβ, L1 (L2) и ΔМ, обеспечивающие на матрице 21 контролируемого тепловизионного прибора 16 изображение A'-B'-C'-D' тест-объекта с требуемыми параметрами (ΔY, ΔХ, L1'(L2), ΔМ').
Поддержание величины ΔМ осуществляется следующим образом.
Участок в центральной части рабочей поверхности фонового излучателя 4, не закрытый узлом 3 миры, создает за счет определенного нагрева или охлаждения фонового излучателя 4 и того, что температура узла 3 мир (TM) равна температуре окружающей среды, контрастный, с определенным уровнем контрастного излучения ΔМ, поток инфракрасного излучения, который через объектив 2 направляется во входной зрачок контролируемого тепловизионного прибора 16.
В контролируемом тепловизионном приборе 16 контрастное инфракрасное излучение преобразуется в яркостный контраст в видимой области, величина которого пропорциональна уровню ΔМ.
Поддержание заданного оператором уровня ΔМ в рабочем диапазоне температур окружающей среды TM обеспечивается за счет поддержания соответствующего уровня разности температур между фоновым излучателем 4 и узлом 3 мир ΔT=f5(TM, ΔМ) и осуществляется следующим образом.
С выхода измерителя 6 температуры узла 3 мир текущее значение TM через блок 9 вычислительный подается в первый блок 8 управления, в который заранее вводится зависимость ΔТ=f5(TM, ΔМ), полученная расчетным или эмпирическим путем.
Первый блок 8 управления, используя данную зависимость, вычисляет значение ΔТ, соответствующее заданному оператором значению уровня контрастного излучения ΔМ и текущему значению температуры TM узла 3 мир.
Это значение ΔТ передается в блок 9 вычислительный (выполненный, например, на микроконтроллере MSC1210), в который также поступает текущее значение ΔТ с измерителя 7 разности температур между фоновым излучателем 4 и узлом 3 мир.
Блок 9 вычислительный сравнивает текущее и требуемое значения ΔТ и выдает соответствующий их разности сигнал на исполнительный элемент 5 фонового излучателя 4, происходит нагрев или охлаждение фонового излучателя 4, чем обеспечивается совпадение с заданной точностью требуемого и текущего значений ΔТ, и, тем самым, поддержание требуемого значения ΔМ.
Установка требуемого значения L1 (и L2) осуществляется соответствующей установкой двух подвижных мир 10 и 11, входящих в состав узла 3 мир и формирующих тест-объект A-B-C-D инфракрасного коллиматора 1.
Первый блок 8 управления передает требуемое значение L1 и L2 в блок 9 вычислительный, который по сигналам с двух датчиков 14 и 15 перемещения с помощью двух приводов 12 и 13 устанавливает две подвижные миры 10 и 11 так, что соответствующие размеры тест-объекта A-B-C-D инфракрасного коллиматора 1 будут равны L1 и L2, при этом заданное значение L2 берется равным заданному значению L1.
Установка требуемого положения на матрице 21 контролируемого тепловизионного прибора 16 центра F' изображения A'-B'-C'-D' тест-объекта осуществляется следующим образом.
Второй блок 23 управления по вычисленным значениям Δα и Δβ определяет соответствующие этим значениям показания датчиков 20 и 25 положения приводов 18 и 19 углового перемещения. Также во второй блок 23 управления через контроллер 26 поступают текущие данные с датчиков положения 20 и 25 (выполненных, например, на оптических угловых энкодерах SIGNUM RESM с разрешением до 0,01") приводов 18 и 19 углового перемещения. Второй блок 23 управления сравнивает вычисленные и текущие данные, вычисляет разность и после ее обработки (например, пропорционально-интегрально-дифференциального преобразования) выдает соответствующие (цифровые) сигналы на контроллер 26, который формирует соответствующие сигналы (аналоговые) управления приводами 18 и 19 углового перемещения. Перемещение контролируемого тепловизионного прибора 16, зафиксированного в устройстве поворотно-наклонном, осуществляется до совпадения текущих и вычисленных данных с датчиков положения 20 и 25.
Для динамического одновременного изменения на матрице 21 контролируемого тепловизионного прибора 16 размера L1' изображения A'-B'-C'-D' тест-объекта, величины ΔМ', величин ΔY и ΔХ, в первый блок 8 управления вводятся зависимости L1'=F3(t), ΔМ'=F4(t), а во второй блок 23 управления - зависимости ΔY=F1(t), ΔХ=F2 (t), где t - время, по которым первый блок 8 управления вычисляет и передает в блок 9 вычислительный текущие (вычисленные) значения L1', L2=L1 и ΔМ, а второй блок 23 управления вычисляет текущие значения Δα и Δβ и передает соответствующие сигналы в контроллер 26, чем и обеспечивается динамическое изменение ΔМ', L1', L2', Δα, Δβ.
Устройство 24 временнОго согласования служит для синхронизации работы (обмена метками времени) первого блока 8 управления и второго блока 23 управления.
Таким образом, установка контролируемого тепловизионного прибора 16 на устройстве поворотно-наклонном, используемом для углового перемещения относительно двух взаимно перпендикулярных осей, позволяет осуществить имитацию трехмерного перемещения цели с заданной скоростью за счет обеспечения возможности автоматического одновременного изменения с требуемыми скоростями значений ΔМ, размера тест-объекта A-B-C-D инфракрасного коллиматора 1 и положения изображения A'-B'-C'-D' тест-объекта на матрице 21 контролируемого тепловизионного прибора 16, что позволяет контролировать работу тепловизионных приборов в режимах поиска, захвата и сопровождения цели, приближающейся или удаляющейся с определенной скоростью по заданной траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФРАКРАСНЫЙ КОЛЛИМАТОР | 2021 |
|
RU2779741C1 |
| ИНФРАКРАСНЫЙ КОЛЛИМАТОР | 2011 |
|
RU2470335C1 |
| Способ и устройство автоматической юстировки зеркальных телескопов | 2017 |
|
RU2690723C1 |
| Способ физического моделирования фоно-целевой обстановки для испытаний бортовых оптико-электронных головок самонаведения | 2022 |
|
RU2794448C1 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ УГЛОВОГО ПОЛЯ ЗРЕНИЯ И КОНТРОЛЯ ВЕЛИЧИНЫ ШАГА ЛИНИЙ МИРЫ ТЕСТ-ОБЪЕКТА | 2013 |
|
RU2521152C1 |
| ИНФРАКРАСНЫЙ КОЛЛИМАТОР | 2005 |
|
RU2292067C2 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |
| ИНФРАКРАСНЫЙ КОЛЛИМАТОРНЫЙ КОМПЛЕКС | 2003 |
|
RU2244950C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| УСТАНОВКА ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ПРИЕМНИКОВ ИЗЛУЧЕНИЯ | 2010 |
|
RU2439597C1 |
Изобретение предназначено для контроля работы тепловизионных приборов в режиме поиска, захвата и сопровождения цели, приближающейся или удаляющейся с определенной скоростью по заданной траектории. Имитатор движущейся цели содержит инфракрасный коллиматор, состоящий из объектива, узла мир, размещенного в фокальной плоскости коллиматора перед фоновым излучателем, снабженным исполнительным элементом, измерителя температуры узла мир, измерителя разности температур между фоновым излучателем и узлом мир, первого блока управления, первый выход которого подключен к блоку вычислительному. Узел мир выполнен с возможностью формирования тест-объекта с регулируемым размером и состоит из двух мир, каждая из которых имеет привод и датчик перемещения, а блок вычислительный связан с измерителем температуры узла мир, измерителем разности температур между фоновым излучателем и узлом мир, исполнительным элементом фонового излучателя, приводами и датчиками перемещения каждой из мир. В имитатор движущейся цели дополнительно введено устройство поворотно-наклонное, выполненное с возможностью фиксации в нем контролируемого тепловизионного прибора, снабженное приводами углового перемещения и датчиками положения, подключенными через контроллер ко второму блоку управления, который через устройство временного согласования подключен ко второму выходу первого блока управления. Технический результат - осуществление имитации трехмерного перемещения цели с заданной скоростью за счет обеспечения возможности автоматического одновременного плавного изменения с требуемыми скоростями значений уровней контрастного излучения, размера изображения тест-объекта инфракрасного коллиматора и положения изображения тест-объекта инфракрасного коллиматора на матрице ФПУ контролируемого тепловизионного прибора. 5 ил.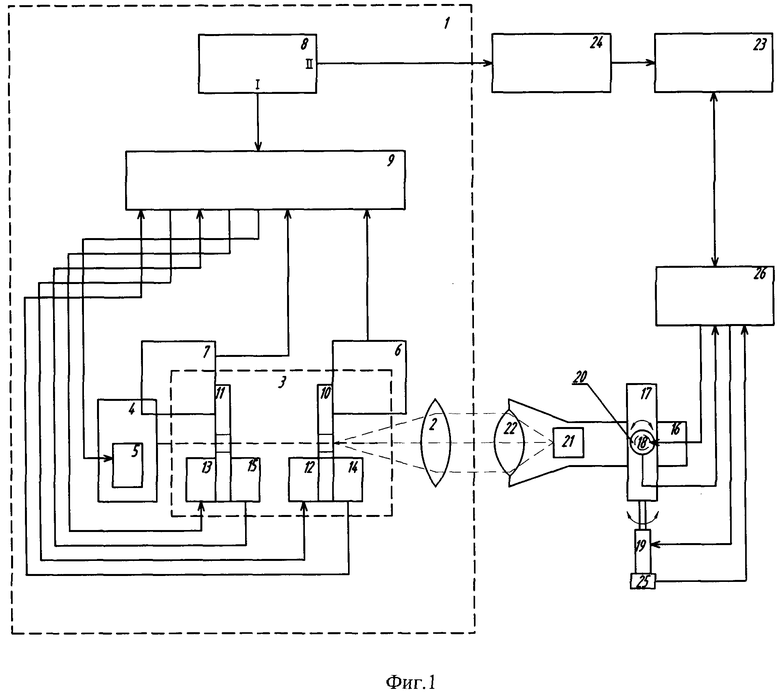
Инфракрасный имитатор движущейся цели, содержащий инфракрасный коллиматор, состоящий из объектива, узла мир, размещенного в фокальной плоскости коллиматора перед фоновым излучателем, снабженным исполнительным элементом, измерителя температуры узла мир, измерителя разности температур между фоновым излучателем и узлом мир, первого блока управления, первый выход которого подключен к блоку вычислительному, при этом узел мир выполнен с возможностью формирования тест-объекта с регулируемым размером и состоит из двух мир, каждая из которых имеет привод и датчик перемещения, а блок вычислительный связан с измерителем температуры узла мир, измерителем разности температур между фоновым излучателем и узлом мир, исполнительным элементом фонового излучателя, приводами и датчиками перемещения каждой из мир, отличающийся тем, что в него дополнительно введено устройство поворотно-наклонное, выполненное с возможностью фиксации в нем контролируемого тепловизионного прибора, снабженное приводами углового перемещения и датчиками положения, подключенными через контроллер ко второму блоку управления, который через устройство временного согласования подключен ко второму выходу первого блока управления.
| ИНФРАКРАСНЫЙ КОЛЛИМАТОР | 2021 |
|
RU2779741C1 |
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 2001 |
|
RU2222034C2 |
| ИНФРАКРАСНЫЙ КОЛЛИМАТОР | 2011 |
|
RU2470335C1 |
| CN 111551349 A, 18.08.2020 | |||
| CN 202661245 U, 09.01.2013. | |||
