Область техники
Изобретение относится к области машиностроения и может быть использовано в системах дистанционного управления мобильными машинами различного назначения с навесным оборудованием, в том числе стреловых грузоподъемных кранов, бульдозеров и кранов-манипуляторов.
Предшествующий уровень техники
Известно устройство управления строительной машиной, содержащее пульт управления, расположенный на строительной машине или расположенный вне ее с возможностью проводной или беспроводной передачи сигналов на электронный блок управления для установки и запоминания системы координат и формирования, в зависимости от результатов обработки, информационных сигналов для оператора и/или сигналов управления приводами машины, дисплейное устройство, выполненное с возможностью отображения информации, поступающей от электронного блока и/или пульта управления, в том числе с возможностью отображения системы координат на дисплейном устройстве, которое оснащено сенсорным экраном, а электронный блок управления и дисплейное устройство выполнены с возможностью установки системы координат с использованием сигналов, формируемых сенсорным экраном при воздействии на него оператора (RU 2399576 C1, В66С 13/18, E04G 21/04, 20.09.2010).
Устройство имеет ограниченную область применения только в составе устройств с электронным блоком управления машиной, способной запоминать систему координат и выработку соответствующих команд в комплекте с пультом дистанционного управления.
Известно также устройство управления строительной машиной, содержащее беспроводной пульт дистанционного управления в составе контроллера, к которому подключены дисплей, по крайней мере, один орган управления рабочими движениями и, по крайней мере, один переключатель режимов управления и аварийный выключатель для принудительной остановки машины, канал связи с электронным блоком системы безопасности грузоподъемной машины и/или управляющими устройствами приводов механизмов грузоподъемной машины, а контроллер приспособлен для обработки сигналов органа управления рабочими движениями и переключателя режимов управления, установки выбранных направлений рабочих движений, а также для формирования команд управления механизмами строительной машины в соответствии с выбранными направлениями рабочих движений (RU 130984 U1, В66С 13/08, 10.08.2013).
Недостатком известного решения является низкая надежность остановки машины при возникновении нештатной ситуации. Для передачи сигнала от аварийного выключателя к управляющим устройствам приводов механизмов машины используется общий канал связи беспроводного пульта дистанционного управления с электронным блоком системы безопасности грузоподъемной машины и/или управляющими устройствами приводов механизмов грузоподъемной машины. При этом отключение рабочих движений производится с помощью реле, входящего в состав контроллера системы управления. Вследствие этого, выполнение команды на остановку движений машины определяется надежностью этого канала связи.
Известно устройство дистанционного управления краном, строительной машиной или тележкой для поддонов, содержащее станцию управления, имеющее по меньшей мере одно средство ввода команд управления и устройство передачи сигналов для последующей передачи команд в устройство управления машины, устройство отображения рабочего оборудования и/или окружения машины, модуль определения перемещения частей машины, модуль для выборочной предварительной настройки устройства дистанционного управления с использованием по меньшей мере одной камеры, передающая на устройство отображения, обстановку у машины и/или части рабочего оборудования (ЕР 3408210, В66С 13/40, 05.12.2018).
Недостатком известного решения является использование станции управления не имеющей аналогичного расположения рычагов управления, как самой машиной, так и навесным оборудованием. Как следствие, его использование требует специальной подготовки и не может эффективно использоваться штатным оператором машины. Отсутствие привычного расположения рычагов управления снижает эффективность использования строительной машины и может приводить к ошибкам оператора, что снижает безопасность работы.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является система радиоуправления строительной машиной, содержащая пульт дистанционного управления, включающий в себя контроллер, к которому подключены дисплей, по крайней мере, один орган управления рабочими движениями или вспомогательными функциями, как минимум один трансивер для организации как минимум одного радиоканала связи с блоком передачи данных, установленный на беспроводном пульте дистанционного управления, аварийный выключатель для принудительной остановки привода механизма машины при возникновении на ней нештатной ситуации (RU 2642026, В66С 13/40, 23.01.2018). При этом контроллер приспособлен для обработки сигналов органа или органов управления рабочими движениями и переключателя режимов управления, а также для формирования команд управления механизмами машины в соответствии с выбранными направлениями рабочих движений.
Недостатком известного решения является ограниченная функциональная возможность. Это обусловлено тем, что строительные машины оснащены преимущественно гидравлическим приводом исполнительных механизмов с прямым управлением распределителем через клапан-джойстик. В связи с этим возможность использования устройства дистанционного управления, построенного в соответствии с известным решением, непосредственно невозможно, так как управляющие сигналы с контролера не могут быть отработаны на рычагах управления машины и/или навесного оборудования.
Кроме того, отсутствие в пульте управления дистанционного типичного расположения рычагов управления, аналогичного управляемой машиной, требует специальной подготовки и исключает возможность использования штатного оператора машины для дистанционного управления строительной машиной.
Техническая задача, на решение которой направлено изобретение, заключается в расширении возможностей системы дистанционного управления строительной машиной за счет использования для управления серийной машиной без изменения ее штатной системы управления.
Раскрытие изобретения
Техническая задача решается тем, что в известной системе дистанционного управления строительной машиной с навесным оборудованием, содержащей выделенный комплекс для оператора машины, включающий рычаги управления движением машиной и, по крайней мере, одним навесным агрегатом, выключатель для запуска и остановки привода машины, контроллер, к которому подключены дисплей для отображения изображений с камер наблюдения, установленных на машине, контроллер, приспособленный для обработки сигналов с органов управления рабочими движениями, блок передачи данных между органами управления машины и как минимум одним беспроводным интерфейсом обмена данными с комплексом, по крайней мере, один трансивер для организации радиоканала связи от блока передачи данных, в качестве выделенного комплекса используется однотипная кабина управления строительной машиной, а клапан-джойстики, размещенные на строительной машине, оснащены линейными актуаторами и объединены в единый комплекс с автономным источником питания и трансивером.
Известно техническое решение (DE №102013011818, G09B /04, 15.07.2013), в соответствии с которым предусмотрена кабина крановщика в виде поста управления с соответствующими средствами ввода данных, причем смотровые окна или остекление имитируемой кабины крановщика заменены дисплеями, на которых демонстрируется виртуальное изображение окружения крана. При этом технический имитационный модуль должен отражать также динамические характеристики компонентов управления и привода и учитывать их на изображении дисплея, что является технически сложным устройством требующее значительных затрат.
Оснащение клапан-джойстиков, размещенных на строительной машине, линейными актуаторами и объединение в единый комплекс с автономным источником питания и трансивером неизвестно.
Краткое описание фигур
Изобретение поясняется изображениями.
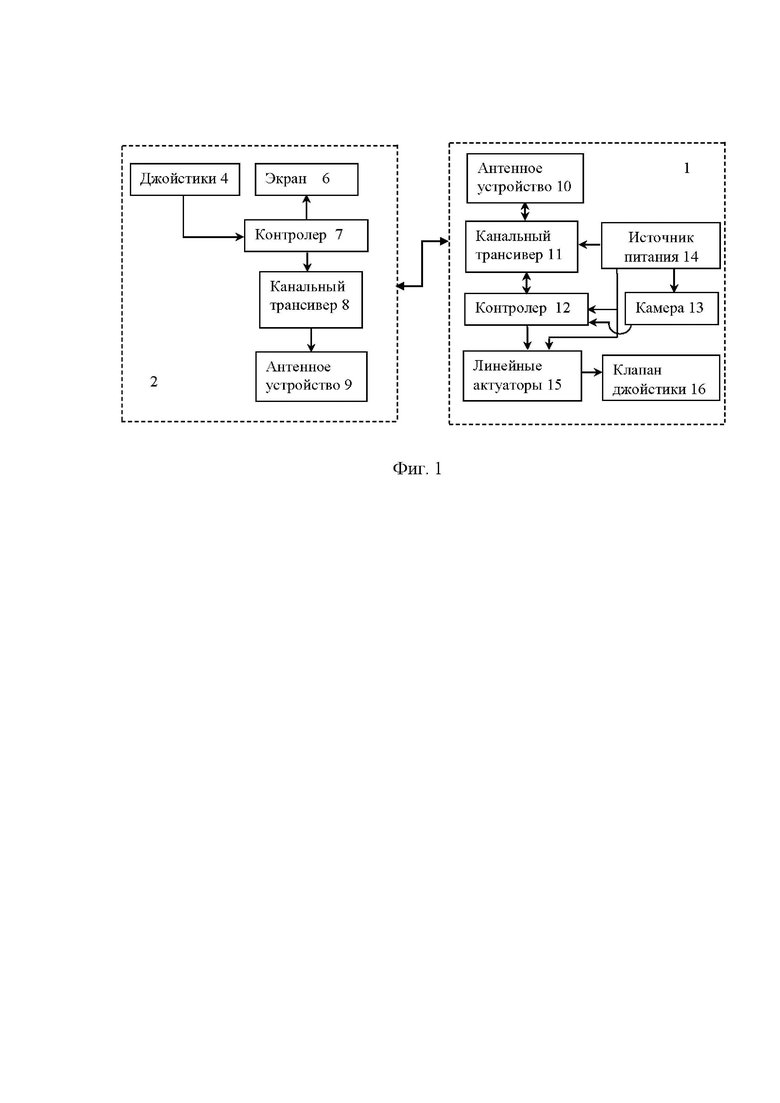
На фиг. 1 представлена принципиальная схема системы дистанционного управления.
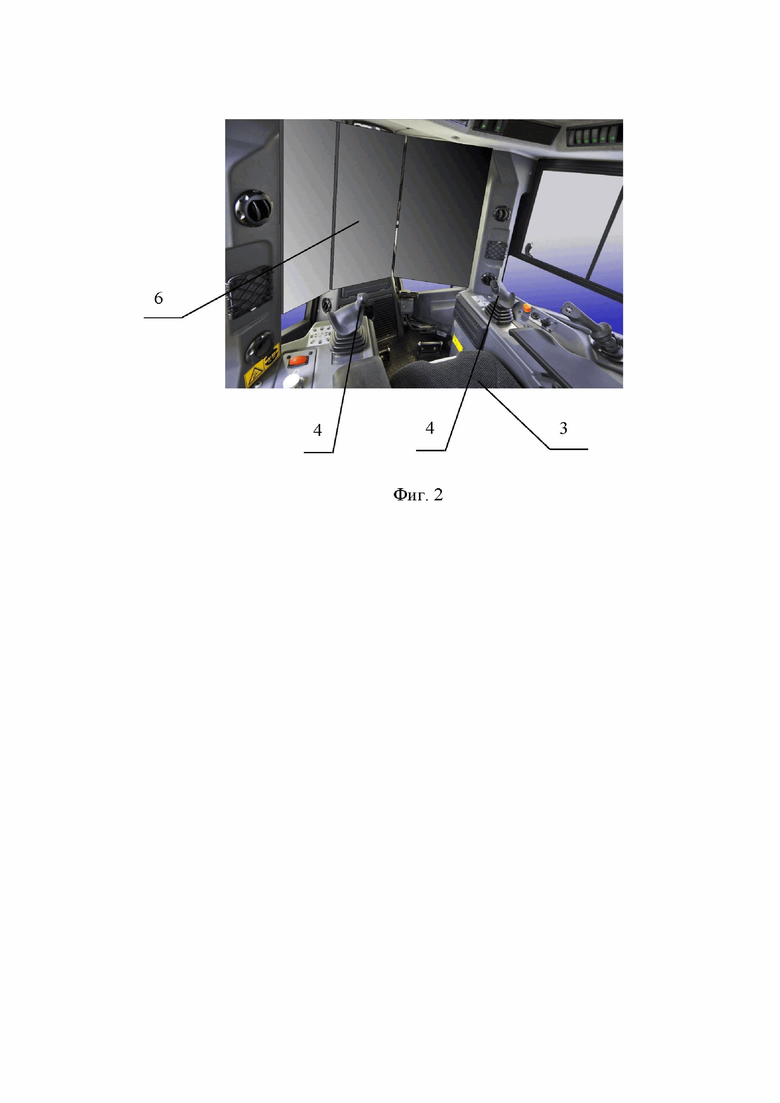
На фиг. 2 представлена компоновочная схема выделенного комплекса для оператора.
Вариант осуществления изобретения
Система дистанционного управления строительной машиной включает два комплекса 1 и 2 (фиг. 1). Комплекс 1 размещается на строительной машине. Комплекс 2 выделен в отдельный модуль и размещается на удалении от строительной машины стационарно или на подвижной платформе. В качестве комплекса 2 используется однотипная кабина управления строительной машиной, оснащенная джойстиками управления движением строительной машиной 4 и, по крайней мере, одним навесным агрегатом (фиг. 1, 2). В комплексе 2 окна заменены экранами 6. Комплекс 2 оснащен контролером 7, канальным трансивером 8, антенным устройством 9.
Джойстики управления 4 и экраны 6 подключены к контролеру 7. Контролер 7 связан с канальным трансивером 8, через который управляющие сигналы поступают на антенное устройство 9. Контроллер 7 обеспечивает обработку сигналов с джойстиков управления 4, установку выбранных направлений движений строительной машины и формирование команд управления ее механизмами и навесным оборудованием. Джойстики управления 4 и экраны 6 располагаются относительно кресла оператора аналогично положению на управляемой машине. Это исключает необходимость оператору строительной машины приспосабливаться к системе управления.
Комплекс 1 включает антенное устройство 10, канальный трансивер 11, контролер 12, камеру 13, автономный источник питания 14, линейные актуаторы 15. Линейные актуаторы 15 установлены с возможностью воздействия на золотники клапан-джойстиков 16, входящих в состав системы управления строительной машины. При использовании на строительной машине джойстиков с управлением тросами линейный актуатор 15 устанавливается с возможностью воздействия на наконечники троса. Воздействия на золотники клапан-джойстиков 16 не требуют значительных усилий. В связи с этим используются компактные маломощные линейные актуаторы 15. В зависимости от конструкции клапан-джойстиков 16 линейные актуаторы 15 закрепляются непосредственно на рычаге джойстика или на отдельной стойке.
Радиоканал образуется двумя двухканальными трансиверами 8 и 11, снабженными соответственно антенными устройствами 9 и 10.
Комплекс 1 снабжен автономным источником питания 14 в виде аккумулятора. Питание комплекса 2 может осуществляться от аккумулятора, стационарной сети или генератора. Линейный актуатор 15, канальный трансивер 11, источник питания 14 и антенное устройство 10 объединены в единый комплекс. Их структурная организация в единый комплекс обеспечивает возможность оперативного перевода рядовой строительной машины в категорию дистанционно управляемой. Для реализации такого перевода требуется разместить в мобильном блоке на строительной машине канальный трансивер 11, источник питания 14 и антенное устройство 10 и закрепить линейный актуатор 15 на рычагах джойстиков или на корпусе. Линейные актуаторы 15 подключаются к штатному контролеру 13 строительной машины.
Функционирование системы дистанционного управления строительной машиной.
После включения питания в комплексе 2 с рабочего места оператора 3 контролер 7 запускает программу тестирования состояния задействованного оборудования и далее через канальный трансивер 8 и антенное устройство 9 выполняется включение питания в комплексе 1.
После включения питания контролер 12 запускает программу тестирования состояния строительной машины, через камеру 13 формирует отображение окружения машины и передает информацию через канальный трансивер 11 и антенное устройство 10 в комплекс 2. Состояние строительной машины и готовность к работе отображается на экранах 6 и оператор принимает решение о выполнении рабочих действий. Подается команда на запуск двигателя строительной машины, что отображается на экране 6. Оператор воздействует на джойстики управления 4 и формирует требуемые команды управления на выполнение движений строительной машины или навесного оборудования. Через контролер 7, канальный трансивер 8, антенное устройство 9, и далее через антенное устройство 10 в канальный трансивер 11 информация поступает на штатный контролер 12 строительной машины. Контролер 12 формирует команды на перемещение выходного звена конкретного линейного актуатора 15 и за счет этого реализуется воздействие на золотник распределителя управляемого механизма. Обеспечивается подача жидкости в гидроцилиндр или гидромотор и выполняется требуемое движение строительной машины или навесного оборудования. Выполняемые движения регистрируются через камеру 13 и передаются через канальные трансиверы 8 и 11, и далее отображаются на экране 6.
Оператор, находясь в комплексе 2, выполняет дистанционное управление строительной машиной в привычной обстановке. Исключается необходимость адаптации к новому расположению рукояток управления. Положение джойстиков аналогичное положению в управляемой машине исключает необходимость специальной подготовки оператора и снижает вероятность ошибочных действий.
Единый комплекс управления с автономным источником питания 14 позволяет оперативно установить систему дистанционного управления на серийную строительную машину. При этом оснащение линейными актуаторами 15 клапан-джойстиков 16 не требует внесения изменений в систему управления строительной машиной, а является ее дооснащением.
Данное техническое решение особенно актуально при экстренном переоснащении строительной техники с навесным оборудованием на использование в режиме дистанционного управления.
Таким образом, предлагаемое техническое решение обеспечивает расширение возможностей за счет ее использования на штатной строительной машине без изменения ее системы управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНОЙ СО СТРЕЛОВЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2642026C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ КОМАНДНО-ШТАБНАЯ МАШИНА | 2014 |
|
RU2550734C1 |
| МОБИЛЬНАЯ АППАРАТНАЯ МНОГОКАНАЛЬНОЙ СВЯЗИ | 2023 |
|
RU2808786C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО МОНИТОРИНГА РАБОЧИХ ПОКАЗАТЕЛЕЙ НАВЕСНОГО ОБОРУДОВАНИЯ КОМБИНИРОВАННОЙ ДОРОЖНОЙ МАШИНЫ И СПОСОБ ЕГО РАБОТЫ | 2023 |
|
RU2807461C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| МОБИЛЬНАЯ МНОГОКАНАЛЬНАЯ РАДИОПРИЕМНАЯ АППАРАТНАЯ | 2015 |
|
RU2582993C1 |
| ПОДВИЖНАЯ КОМПЛЕКСНАЯ ИСПЫТАТЕЛЬНАЯ АППАРАТНАЯ | 2017 |
|
RU2651779C1 |
| ПОДВИЖНАЯ АВТОМАТИЗИРОВАННАЯ МАШИНА СВЯЗИ И УПРАВЛЕНИЯ РОБОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2021 |
|
RU2762624C1 |
| ИМИТАТОР ПИТАЮЩЕЙ ЭЛЕКТРИЧЕСКОЙ СЕТИ (ИПЭС) | 2016 |
|
RU2624610C1 |
Изобретение относится к области машиностроения и может быть использовано в системах дистанционного управления мобильными машинами различного назначения. Система дистанционного управления строительной машиной с навесным оборудованием включает выделенный комплекс, в качестве которого используется однотипная кабина управления строительной машиной, в которой окна управления заменены экранами (6), а клапан-джойстики (16), размещенные на строительной машине, оснащены линейными актуаторами (15) и объединены в единый комплекс с автономным источником питания (14) и трансивером (11). Достигается расширение возможностей системы дистанционного управления строительной машиной за счет использования для управления серийной машиной без изменения ее штатной системы управления. 2 ил.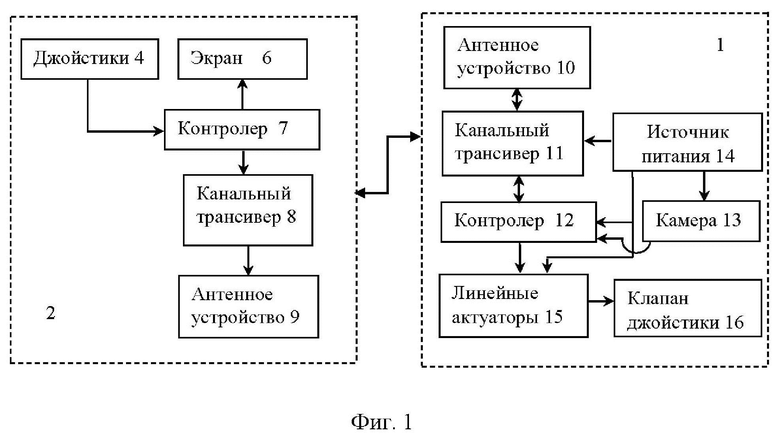
Система дистанционного управления строительной машиной с навесным оборудованием, содержащая выделенный комплекс для оператора машины, включающий рычаги управления движением машиной и, по крайней мере, одним навесным агрегатом, выключатель для запуска и остановки привода машины, контроллер, к которому подключены экраны для отображения изображений с камер наблюдения, установленных на машине, контроллер, приспособленный для обработки сигналов с органов управления рабочими движениями, блок передачи данных между органами управления машины и как минимум одним беспроводным интерфейсом обмена данными с комплексом, по крайней мере, один трансивер для организации радиоканала связи от блока передачи данных, отличающаяся тем, что в качестве выделенного комплекса используется однотипная кабина управления строительной машиной, в которой окна управления заменены экранами, а клапан-джойстики, размещенные на строительной машине, оснащены линейными актуаторами и объединены в единый комплекс с автономным источником питания и трансивером.
| EP 3744910 А2, 02.12.2020 | |||
| JP 2018095371 A, 21.06.2018 | |||
| WO 2018211489 A1, 22.11.2018 | |||
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |

