Изобретение относится к измерительной технике и может быть использовано в машиностроительном и ремонтном производстве.
Известен способ контроля соосности валов машин, заключающийся в измерении радиального и осевого биения конструктивных элементов первой машины относительно конструктивных элементов второй машины, при этом одна из которых имеет крепительный фланец, измерительный узел устанавливают на валу первой машины и измеряют его радиальное биение относительно цилиндрической поверхности заточки крепительного фланца, а осевое - относительно его торца [1. Авторское свидетельство СССР № 1613843 А1, МПК G01B 5/24, 5/25. Способ контроля соосности валов машин/ Шафранский В.А. 15.12.90. Бюл. № 46].
Недостатком известного способа является недостаточная точность контроля соосности валов, так как в данном случае контролируется не соосность соединяемых валов машин, а радиальное и торцовое биение вала одной из них относительно цилиндрической поверхности заточки и торца крепительного фланца другой машины, которые, в свою очередь, имеют погрешности расположения по отношению к выходному валу этой машины.
Известен способ контроля соосности валов машин, заключающийся в определении показаний измерителя в двух диаметрально противоположных горизонтальных положениях и в вертикальном верхнем положении. Измерениями определяют величину горизонтальной несоосности, а вертикальную несоосность определяют в соотношении от диаметра вала, в контакте с которым установлен измеритель, измеренной горизонтальной несоосности и разности показаний измерителя в вертикальном положении и наибольшим из его показаний в горизонтальном положении [2. Патент на изобретение RU 2748150 С1, МПК G01B 5/25. Способ контроля соосности валов/ Белоусов Ю.В., Кириловский В.В., Мамиева И.А. 07.02.2020. Бюл. № 13].
Известный способ имеет недостаточную точность и не позволяет в полной мере выполнять контроль соосности соединяемых валов. С его помощью могут определяться только радиальные смещения концов соединяемых валов. Поскольку оси валов обычно скрещиваются, то для определения расстояния между осями соединяемых валов, то есть несоосности валов, этого явно недостаточно. Кроме того, для правильного расположения валов соединяемых агрегатов необходимо также контролировать и их угловое смещение, что с помощью данного способа сделать невозможно.
Техническим результатом изобретения является повышение точности контроля соосности валов и расширение области использования.
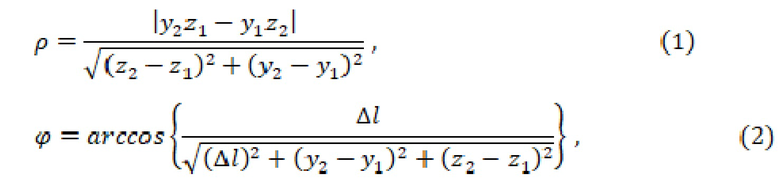
Технический результат достигается тем, что в известном способе контроля соосности валов с помощью измерителя линейных перемещений, например индикатора, установленного на одном валу в контакте с другим валом, поворачивая вал с измерителем, определяют экстремальные показания измерителя и соответствующее часовому значению положение измерителя при одном из экстремальных показаний измерителя в двух сечениях перпендикулярных оси поворачиваемого вала, а несоосность и угловое смещение валов определяют по формулам:


где  - несоосность валов, мм;
- несоосность валов, мм;
 - угловое смещение валов, мм;
- угловое смещение валов, мм;

 - наибольшее и наименьшее показания измерителя в первом и во втором сечении соответственно, мм;
- наибольшее и наименьшее показания измерителя в первом и во втором сечении соответственно, мм;
 - угол, соответствующий часовому положению измерителя, отсчитываемый от вертикали, при одном из экстремальных положений измерителя, мм;
- угол, соответствующий часовому положению измерителя, отсчитываемый от вертикали, при одном из экстремальных положений измерителя, мм;
 - расстояние между сечениями, в которых выполняются измерения, вдоль оси поворачиваемого вала, мм.
- расстояние между сечениями, в которых выполняются измерения, вдоль оси поворачиваемого вала, мм.
На фиг. 1 изображены проекции соединяемых валов.
На фиг. 1 обозначены: 1 - вал, на котором установлен измеритель линейных перемещений, например индикатор, 2 - вал, в контакте с которым находится измеритель. На фиг. 1 показано только одно сечение вала 2.
Предлагаемый способ осуществляется следующим образом. Сначала измеритель устанавливается в крайнее правое или левое горизонтальное положение, соответствующее часовому значению 3:00 или 9:00. Например, в точку 3:00. Затем вал 1 поворачивается, перемещая измеритель над валами 1 и 2 в диаметрально противоположное положение. В точку 9:00. При этом в точке  определяется экстремальное показание измерителя для участка 3:00…9:00 (максимальное или минимальное), а также часовое значение положения самой точки на поверхности вала 2. После этого вал 1 поворачивается дальше, перемещая измеритель в район точки
определяется экстремальное показание измерителя для участка 3:00…9:00 (максимальное или минимальное), а также часовое значение положения самой точки на поверхности вала 2. После этого вал 1 поворачивается дальше, перемещая измеритель в район точки  , где показание измерителя будет иметь другое экстремальное значение. Точка будет располагаться диаметрально противоположно точке . Поэтому определить ее примерное расположение будет несложно. При этом отпадает необходимость перемещать измеритель во всем пространстве под валами 1 и 2. Однако, иногда бывает проще выполнять измерения в пространстве под валами. Таким образом выполняются измерения в одном сечении вала 2, расположенном перпендикулярно оси вала 1. Затем измеритель перемещается вдоль оси вала 1 и аналогичные измерения выполняются уже в другом сечении вала 2. При этом желательно, чтобы сечения, в которых должны выполняться измерения, располагались как можно дальше друг от друга. При перемещении измерителя положение элементов его крепления с валом 1 лучше не изменять. Удобнее всего смещать измеритель по штанге. Кроме того, при контроле несоосности валов большого диаметра на штанге можно устанавливать сразу два измерителя. В этом случае перемещать измеритель вовсе не потребуется.
, где показание измерителя будет иметь другое экстремальное значение. Точка будет располагаться диаметрально противоположно точке . Поэтому определить ее примерное расположение будет несложно. При этом отпадает необходимость перемещать измеритель во всем пространстве под валами 1 и 2. Однако, иногда бывает проще выполнять измерения в пространстве под валами. Таким образом выполняются измерения в одном сечении вала 2, расположенном перпендикулярно оси вала 1. Затем измеритель перемещается вдоль оси вала 1 и аналогичные измерения выполняются уже в другом сечении вала 2. При этом желательно, чтобы сечения, в которых должны выполняться измерения, располагались как можно дальше друг от друга. При перемещении измерителя положение элементов его крепления с валом 1 лучше не изменять. Удобнее всего смещать измеритель по штанге. Кроме того, при контроле несоосности валов большого диаметра на штанге можно устанавливать сразу два измерителя. В этом случае перемещать измеритель вовсе не потребуется.
По результатам измерений в каждом из двух сечений вала 2 определяются: наибольшее и наименьшее показания измерителя, а также угол соответствующий часовому положению измерителя в точке с экстремальным показанием измерителя в верхней части пространства над валами 1 и 2. Этот угол проще всего отсчитывать от вертикали. Затем по формуле (1) определяется несоосность валов 1 и 2, как наименьшее расстояние между их осями, а по формуле (2) - угловое смещение или перекос валов 1 и 2. При этом диаметр валов 1 и 2 может быть как одинаковым, так и разным.
Если в расчетах по формуле (1) числитель дроби будет равен нулю, то валы 1 и 2 пересекаются. Если же в формуле (1) нулю будет равен знаменатель, то валы 1 и 2 параллельны, а их несоосность будет равна полуразности максимального и минимального показаний измерителя. В обоих сечениях эта величина будет одинакокой. Угол , определенный по формуле (2), в данном случае будет равен нулю. Таким образом, формулы (1) и (2) полностью определяют пространственное расположение осей валов 1 и 2.
Об относительном расположении валов можно судить по тому, в каком месте показание измерителя имеет максимальное значение. Если над валами, то в данном сечении ось вала 2 располагается выше оси вала 1, если под ними, то ось вала 2 располагается ниже оси вала 1.
Например, если при измерениях получено, что в первом сечении вала 2  мм и
мм и 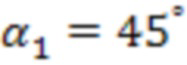 (соответствует часовому положению 1:30), а во втором -
(соответствует часовому положению 1:30), а во втором -  мм и
мм и  (соответствует часовому положению 2:00), и расстояние между сечениями
(соответствует часовому положению 2:00), и расстояние между сечениями  мм. Тогда
мм. Тогда  мм;
мм;  мм;
мм;
 мм;
мм;  мм.
мм.
Несоосность валов 1 и 2

а угловое смещение или перекос валов

Таким образом, по сравнению с известным способом [1], заявляемый способ позволяет контролировать несоосность соединяемых валов с более высокой точностью, поскольку измерениям подвергаются непосредственно сами соединяемые валы, а не другие элементы машин, расположенные поблизости от них.
По сравнению с известным способом [2] заявляемый способ также имеет более высокую точность контроля несоосности, поскольку учитывает реальное расположение осей соединяемых валов. Известный способ [2] позволяет определять только горизонтальное и вертикальное смещение осей на концах соединяемых валов, а расстояние между осями валов, то есть их несоосность, с помощью известного способа [2] определена быть не может. Кроме того, использование заявляемого способа позволяет определять угловое смещение или перекос соединяемых валов. Это дает возможность расширить область использования заявляемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СООСНОСТИ ВАЛОВ МАШИН | 2003 |
|
RU2242708C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2020 |
|
RU2754391C1 |
| Способ контроля соосности валов | 2020 |
|
RU2748150C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2012 |
|
RU2500981C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2275588C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2010 |
|
RU2431113C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2007 |
|
RU2365873C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2279631C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭКСТРЕМАЛЬНОЙ НЕСООСНОСТИ | 2007 |
|
RU2370729C2 |
| СПОСОБ КОНТРОЛЯ ЭКСТРЕМАЛЬНОЙ НЕСООСНОСТИ | 2007 |
|
RU2393424C2 |
Изобретение относится к измерительной технике и может быть использовано в машиностроительном и ремонтном производстве. Способ заключается в том, что поворачивая вал с измерителем, определяют экстремальные показания измерителя и соответствующее часовому значению положение измерителя при одном из экстремальных показаний измерителя в двух сечениях перпендикулярных оси поворачиваемого вала, а несоосность и угловое смещение валов определяют в соотношении от разности между наибольшим и наименьшим показаниями измерителя, а также угла, соответствующего часовому положению измерителя, отсчитываемого от вертикали, при одном из экстремальных показаний измерителя. Технический результат данного изобретения - повышение точности контроля соосности валов и расширение области использования. 1 ил.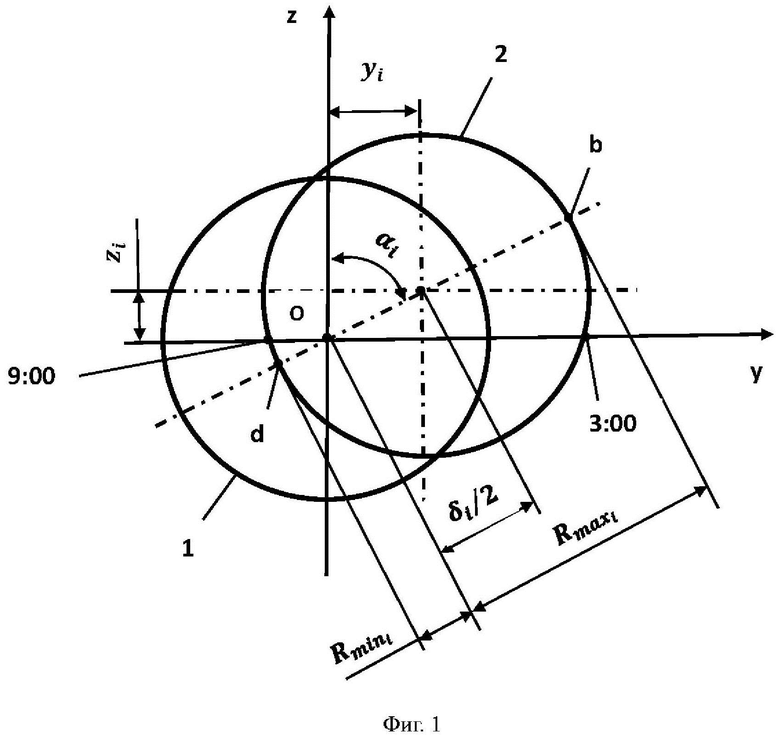
Способ контроля соосности валов с помощью измерителя линейных перемещений установленного на одном валу в контакте с другим валом, отличающийся тем, что поворачивая вал с измерителем, определяют экстремальные показания измерителя и соответствующее часовому значению положение измерителя при одном из экстремальных показаний измерителя в двух сечениях перпендикулярных оси поворачиваемого вала, а несоосность и угловое смещение валов определяют по формулам:
где ρ - несоосность валов, мм;
ϕ - угловое смещение валов, мм;

 - наибольшее и наименьшее показания измерителя в первом и во втором сечении соответственно, мм;
- наибольшее и наименьшее показания измерителя в первом и во втором сечении соответственно, мм;
 - угол, соответствующий часовому положению измерителя, отсчитываемый от вертикали, при одном из экстремальных положений измерителя, мм;
- угол, соответствующий часовому положению измерителя, отсчитываемый от вертикали, при одном из экстремальных положений измерителя, мм;
Δl - расстояние между сечениями, в которых выполняются измерения, вдоль оси поворачиваемого вала, мм.
| Способ измерения несоосности валов и устройство для его осуществления | 1989 |
|
SU1682758A1 |
| RU 112393 U1, 10.01.2012 | |||
| US 4578869 A1, 01.04.1986 | |||
| KR 20120045299 A, 09.05.2012 | |||
| СПОСОБ ДИАГНОСТИКИ ЛЕЙКОЗА КРУПНОГО РОГАТОГО СКОТА | 2010 |
|
RU2425377C1 |
| СПОСОБ КОНТРОЛЯ СООСНОСТИ ВАЛОВ МАШИН | 2003 |
|
RU2242708C1 |

