Изобретение относится к контрольно-измерительной технике и может быть использовано при монтажных работах для контроля соосности валов машин, соединяемых в агрегат.
Известен способ измерения отклонения от соосности двух сопрягаемых карданных валов, заключающийся в том, что измеряют смещение оси полумуфты одного кардана относительно оси второго вала и по полученным результатам определяют величину отклонения от соосности, при этом на полумуфту одного из карданов устанавливают одним концом валик, а другой конец с лысками и отверстием, ось которого перпендикулярна лыскам, помещают между щеками полумуфты второго кардана, измеряют плоским щупом зазор между лысками валика и внутренними поверхностями щек полумуфты, а круглым щупом - между отверстиями в кардане и валике (а.с. СССР №1490437, 1987).
Недостатком известного способа является сложность процесса измерения, который требует дополнительно производить вычислительные операции. Причем для горизонтальной и вертикальной соосности производят различные вычислительные операции.
Известен способ контроля соосности валов машин, заключающийся в измерении радиального и осевого биения конструктивных элементов первой машины относительно конструктивных элементов второй машины, где одна из которых имеет крепительный фланец, измерительный узел устанавливают на валу первой машины и измеряют его радиальное биение относительно цилиндрической поверхности заточки крепительного фланца, а осевое - относительно его торца (см. а.с. СССР №1613843, 1988 г.).
Недостатком известного способа является сложность процесса измерения радиального биения валов, в случае его регулировки. Это объясняется тем, что способ является дискретным (периодическим). В процессе регулировки несоосности иногда требуется непрерывно контролировать текущее значение несоосности. В результате каждый раз потребуется приостанавливать процесс регулировки и повторять операции процесса измерения.
К недостатку известных способов следует отнести и то, что они не определяют истинного значения несоосности (максимального). Для определения максимального значения несоосности при наличии вертикальной и горизонтальной несоосности требуется дополнительное вычисление ее как корень квадратный из суммы квадратов горизонтальной и вертикальной несоосности.
Целью изобретения является возможность непрерывного контроля, например, в процессе регулировки, а также определения горизонтальной, вертикальной и максимальной (экстремальной) несоосности.
Поставленная цель достигается тем, что в известном способе, основанном на том, что определяют расстояние между поверхностями, например, валов, в нем дополнительно вычисляют расстояние между поверхностями при соосном их расположении и корректируют показания измерителя на эту величину, поворачивают, например, устройство на одном из валов, определяют и/или горизонтальную, вертикальную, экстремальную несоосность, устанавливают измеритель, например, в положении экстремальной несоосности и продолжают ее непрерывное измерение.
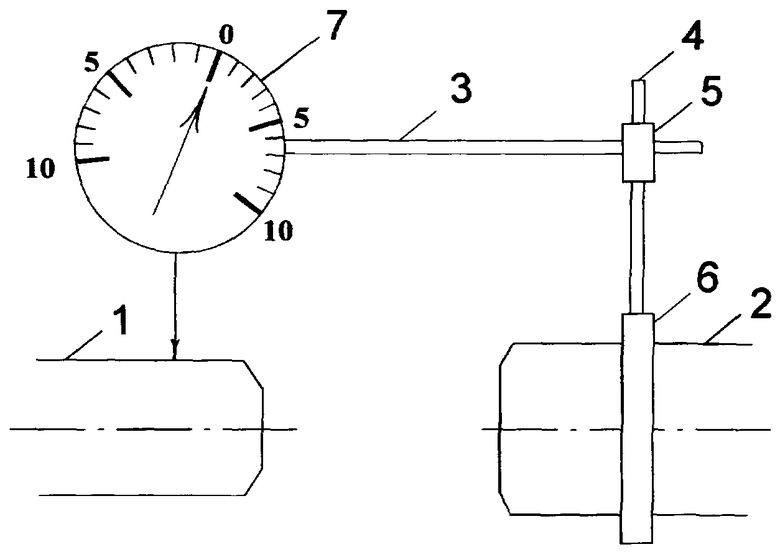
Предлагаемый способ осуществляется следующим образом. На общую станину крепится, например, электродвигатель (на фиг. не показано) с валом 1 и водяной насос с валом 2. На валу 2 посредством штанги 3, стойки 4 и зажимов 5 и 6 устанавливают, например, индикатор 7 в вертикальном положении. Нижний конец стойки 4 в зажиме 6 установлен с возможностью перемещения до контакта с валом 2, например, с помощью пружины, и снабжен стопором (на фиг. не показано). При этом конец подвижной ножки индикатора 7 с Т-образным наконечником при нулевом значении находится на одной горизонтальной линии с нижним концом стойки 4. Перед началом измерения соосности валов 1 и 2 вычисляют расстояние от поверхности валов h=(А-В)/2 при соосном расположении, где А - диаметр вала 1, например, 50 мм; В - диаметр вала 2, например, 60 мм. h=(50-60)/2=-5 мм. Т.к. вал 1 меньшего диаметра и стрелка индикатора 7 будет смещаться против часовой при опускании его измерительной ножки, то шкалу индикатора 7 смещаем на пять делений против часовой стрелки. Измеритель в виде индикаторной головки 7 подготовлен к работе. После этого с помощью зажима 6 индикатор 7 фиксируют на валу 2, а с помощью штанги 3 располагают над валом 1. Если валы 1 и 2 расположены соосно, то после фиксации зажима 6 измерительная ножка индикатора опустится вниз и переместит стрелку в направлении против часовой, что соответствует нулевой несоосности, т.к. она остановится напротив нуля. Это означает, что валы 1, 2 агрегата расположены соосно и не требуют регулировки в вертикальной плоскости. Затем устройство поворачивают в горизонтальную плоскость и определяют экстремальную и горизонтальную несоосность.
После этого индикатор 7 с помощью фиксатора 6 снимают с вала 2 и устанавливают на вал 2 другого агрегата. Так как при серийном или массовом производстве комплектующие одной марки агрегата одинаковые, то и валы 1, 2 будут того же размера, что и в предыдущем агрегате. А это означает, что индикатор 7 готов к работе и не требует корректировки. Предположим, что в новом агрегате валы 1 и 2 расположены своей верхней поверхностью на одной горизонтальной линии, т.е. расстояние между ними равно нулю. В этом случае после фиксации зажима 6 на валу 2 измерительная ножка индикатора 7 по сравнению с предыдущим вариантом переместится вверх на пять миллиметров и переместит стрелку на пять делений по направлению движения часовой и остановится напротив цифры пять. Это означает, что несоосность валов равна пяти миллиметрам. Расположение стрелки индикатора 7 справа от нуля говорит о том, что вал 1 необходимо опустить на пять миллиметров. После этого приступают к регулировке соосности. Т.к. вал 1 расположен на электродвигателе, то с помощью, например, регулировочных болтов (на фиг. не показано) начинают опускать вал 1 вниз, а индикатор 7 будет непрерывно показывать текущее значение несоосности, что позволит быстрее и точнее ее настроить.
Если имеется горизонтальная и вертикальная несоосность, то существует и экстремальная несоосность. В этом случае, поворачивая устройство, например, с вертикальной плоскости в горизонтальную будет дополнительно измерена экстремальная и горизонтальная несоосность. Устройство можно зафиксировать в области, например, экстремальной несоосности и продолжать непрерывно ее измерять. Устройство дополнительно может быть снабжено приводом, поворачивающим зажим 6 по меньшей мере с горизонтального положения измерителя 7 в вертикальное и обратно с запоминанием максимального сигнала, что позволит периодически измерять горизонтальную, вертикальную и экстремальную несоосность. Для непрерывного измерения этих значений необходимо на зажиме 6 закрепить аналогичным образом второй измеритель под углом 90°, а между ними третий установить с возможностью поворота на зажиме 6 с целью поиска экстремального значения.
Предложенный способ может измерять несоосность во время движения, например, вагонов метрополитена. Для этого устройство необходимо снабдить двумя втулками, жестко соединенными между собой под углом 90°, и валиком, вставленным в одну из втулок и жестко закрепленным, например, на раме. Вторую втулку устанавливают на стойке 4. Предполагается, что во время движения, несоосность изменяется в несколько раз в зависимости от величины перевозимого груза, скорости движения, рельефа местности и т.д.
Таким образом, предлагаемый способ позволит измерять горизонтальную, вертикальную и экстремальную (максимальную) несоосность как в отдельности, так и одновременно в режиме, например, непрерывно меняющейся несоосности, что достигается предложенной последовательностью операций при Т-образном наконечнике измерителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2275588C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2004 |
|
RU2279631C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СООСНОСТИ | 2003 |
|
RU2242709C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2012 |
|
RU2500981C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭКСТРЕМАЛЬНОЙ НЕСООСНОСТИ | 2007 |
|
RU2370729C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2007 |
|
RU2365873C2 |
| СПОСОБ КОНТРОЛЯ ЭКСТРЕМАЛЬНОЙ НЕСООСНОСТИ | 2007 |
|
RU2393424C2 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2009 |
|
RU2424491C1 |
| Способ контроля соосности валов | 2020 |
|
RU2748150C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСООСНОСТИ ВАЛОВ | 2020 |
|
RU2754391C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано при монтажных работах для контроля соосности машин, соединяемых в агрегат. Способ заключается в том, что измеряют расстояние между поверхностями валов машин с помощью измерителя, вычисляют расстояние между поверхностями валов при их соосном расположении и корректируют показания измерителя на эту величину. Поворачивают устройство на одном из валов, определяют горизонтальную, вертикальную и экстремальную несоосности, устанавливают измеритель в положении экстремальной несоосности и продолжают измерение несоосности валов. Технический результат данного изобретения - возможность непрерывного контроля в процессе регулировки и упрощение способа. 1 ил.
Способ контроля соосности, например, валов машин, заключающийся в измерении расстояния между их поверхностями с помощью измерителя, отличающийся тем, что вычисляют расстояние между поверхностями валов при их соосном расположении и корректируют показания измерителя на эту величину, поворачивают устройство на одном из валов, определяют горизонтальную, вертикальную и экстремальную несоосности, устанавливают измеритель в положение экстремальной несоосности и продолжают измерение несоосности валов.
| RU 2000131529 A1, 27.11.2002 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ НЕПАРАЛЛЕЛЬНОСТИ И СКРЕЩИВАНИЯ ОСЕЙ ВАЛОВ | 0 |
|
SU188042A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ | 0 |
|
SU238170A1 |
| Способ проверки радиуса профилей желобов, например, колец подшипников качения | 1952 |
|
SU100383A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НЕСООСНОСТИ И ПЕРЕКОСА НАРУЖНЫХ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 0 |
|
SU305345A1 |
| СПОСОБ КОНТРОЛЯ ПАРАЛЛЕЛЬНОСТИ И ПЕРЕКОСА ГЕОМЕТРИЧЕСКИХ ОСЕЙ ВАЛОВ ЗУБЧАТЫХ КОЛЕС | 0 |
|
SU304421A1 |
| Индикаторный прибор для проверки соосности двух цилиндрических поверхностей изделия при его вращении | 1959 |
|
SU124638A1 |

