Область техники
Настоящее изобретение относится к ручным металлодетекторам, предназначенным для обнаружения скрытых в диэлектрических или имеющих слабую электрическую проводимость средах объектов из цветных и черных металлов и может быть использовано в кладоискательстве, археологии, в сфере обеспечения безопасности (личный досмотр, досмотр багажа или корреспонденции), в медицине, пищевой и текстильной промышленностях, и других областях, а так же может быть использовано для определения местонахождения металлодетектора в случае его потери.
Предшествующий уровень техники
Настоящее изобретение относится к ручным металлодетекторам, использующимся преимущественно в сферах кладоискательства и археологии. В кладоискательстве ручные металлодетекторы являются вспомогательными приборами и вынесены в отдельный класс, название которого «пинпоинтеры». Пользователь сначала осуществляет поиск металлодетектором со штангой, имеющим большую зону сканирования, чем ручной металлодетектор, а затем ручной металлодетектор используется для точной локализации металлического объекта, обнаруженного металлодетектором со штангой.
Часто кладоискатели и археологи ведут поиск металлических объектов в сложных природных условиях. В таких условиях нередки случаи потери ручных металлодетекторов, несмотря на специальные места их хранения: кобура на поясе, набедренный чехол и пр. Например, передвигаясь по густому лесу или полю с высоким кустарником, ручной металлодетектор может зацепиться за ветку и выпасть из места его хранения. Кроме того, большую роль играет человеческий фактор. Так как ручной металлодетектор в большинстве ситуаций является вспомогательным прибором, то часто пользователи забывают ручные металлодетекторы в местах поиска металлических объектов после их локализации и извлечении из среды поиска. Таким образом, пользователь несет материальный ущерб, а также теряет производительность дальнейшего поиска металлических объектов, так как процесс локализации найденного металлодетектором со штангой металлического объекта становится длительным и трудозатратным.
Производители ручных металлодетекторов предлагают различные технические решения для минимизации вероятности потери ручного металлодетектора. Самым простым из этих решений является наличие на корпусе специального места для крепления страховочного шнура (тренчика), один конец которого цепляется к ручному металлодетектору, а второй - например, к месту его хранения. Таким образом, при случайном падении ручной металлодетектор остается физически соединен с местом его хранения. Примерами подобного решения могут служить МЕТАЛЛОИСКАТЕЛЬ ПОРТАТИВНЫЙ [1] и METAL DETECTOR WITH HERMETIC HOUSING [2].
Библиографические данные [1]: МЕТАЛЛОИСКАТЕЛЬ ПОРТАТИВНЫЙ: промышленный образец пат. 118302 Рос. Федерация: МКПО 10-05/Бакушев Владимир Александрович (RU), Хайрулин Александр Абдулмянович (RU), патентообладатель: Закрытое акционерное общество "СФИНКС" (RU); - №2019503000; заявл. 16.07.2019; опубл. 15.01.2020 Бюл. №1.
Библиографические данные [2]: METAL DETECTOR WITH HERMETIC HOUSING [Текст]: заявка 14582455: G08B 3/00, G08B 5/00, G08B 7/00, G01D 5/12, H04R 1/02 / Gerald L. Johnson (US), Robert J. Podhrasky (US), Brent C. Weaver (US); заявитель: Garrett Electronics (US);- номер публикации US 9347798; заявл. 24.12.2014; опубл. 24.05.2016; вид публикации В1.
Преимуществом данного технического решения является его простота. К недостаткам можно отнести неудобство использования, связанное с запутыванием страховочного шнура и ограниченностью его длины. По этой причине многие пользователи отказываются от данного технического решения, рискуя потерять ручной металлодетектор или забыть его на месте поиска металлического объекта.
Учитывая недостатки использования страховочного шнура, наряду с местом для его крепления многие производители предусматривают в ручных металлодетекторах режим потери, принцип работы которого заключается в следующем: после определенного времени без выявления металла во включенном состоянии (как правило, несколько минут) металлодетектор считается потерянным и начинает подавать звуковые и/или световые сигналы для более легкого определения его местоположения.
Примерами реализации данного технического решения могут служить ручные металлодетекторы NOKTA PULSEDIVE [3] и MINELAB PRO-FIND 35 [4].
NOKTA PULSED IVE [3] имеет функцию сигнала тревоги при потере, которая облегчает поиск устройства. Если ни одна кнопка не нажата и/или если устройство не обнаруживает никаких целей в течение 5 минут, активируется сигнал тревоги. Устройство начинает издавать короткие звуковые сигналы, и светодиодный фонарик начинает мигать.
MINELAB PRO-FIND 35 [4] имеет функцию «Предупреждения об утере». Если ручной металлодетектор включен, но не используется в течение приблизительно 3 минут, устройство выдаст длинный предупреждающий сигнал. Этот сигнал будет повторяться каждые 10 секунд. Если ручной металлодетектор не будет использоваться еще в течение 5 минут, он автоматически выключится.
Библиографические данные [3]: https://www.noktadetectors.com/wp-content/file-download/pulsedive/pulsedive-user-manual-ru.pdf (дата обращения 20.06.2023 г.).
Библиографические данные [4]: https://www.minelab.com/files/f/494644/4901-0223-11%20GSGPRO-FIND%2015%2020%2035%20Multilanguage_WEB.pdf (дата обращения 20.06.2023 г.).
К уязвимым местам такого технического решения можно отнести следующее:
- режим потери активируется только, если ручной металлодетектор был предварительно включен, что затрудняет возможность определения местоположения потерянного металлодетектора, если он выпал из места хранения в выключенном состоянии;
- отсутствие оперативного предупреждения пользователя о потере ручного металлодетектора - после потери ручного металлодетектора пользователь может переместиться на значительное расстояние от фактического места потери, что значительно затруднит дальнейшее определение местоположение металлодетектора;
- если ручной металлодетектор был потерян во включенном состоянии, то времени работы режима потери может не хватить для определения места его положения. Например, MINELAB PRO-FIND 35 [4] выключится через 5 минут, если пользователь не успеет его обнаружить;
- так как большинство ручных металлодетекторов, использующихся в кладоискательстве и археологии, являются герметичными и водонепроницаемыми, а звуковой элемент расположен внутри корпуса, то они обладают невысокой громкостью звуковой сигнализации, что снижает эффективность определения местоположения ручного металлодетектора при работе режима потери в условиях сильного ветра и других мешающих факторов.
Как правило, все ручные металлодетекторы выполнены в портативном корпусе, предназначенном для ручного использования, внутри которого размещены первичный преобразователь, электронная схема и источник питания. На поверхность корпуса вынесены элементы управления и индикации. Наиболее передовые и технологичные модели ручных металлодетекторов дополнительно содержат блок двунаправленной беспроводной связи, обеспечивающий настройку, мониторинг и контроль металлодетектора с помощью удаленного совместимого устройства. К таким металлодетекторам можно отнести СФИНКС 03 [5]. Данная модель имеет блок двунаправленной беспроводной связи на основе технологии Bluetooth, что позволяет использовать в качестве удаленного совместимого устройства любой смартфон с установленным специальным приложением. Через приложение на смартфоне можно настраивать различные параметры ручного металлодетектора, включая интервал времени, через который металлодетектор переходит в режим потери при отсутствии детекции металлических объектов и нажатий на кнопку. Таким образом, пользователь может подобрать минимальный интервал времени перехода в режим потери, учитывая условия поиска металлических объектов. Такая возможность снижает роль человеческого фактора, так как пользователь не успеет переместиться на большое расстояние от места, где он забыл ручной металлодетектор в момент включения режима потери.
Режим потери СФИНКС 03 [5] аналогичен режимам потери металлодетекторов [3] и [4] (короткая звуковая сигнализация один раз в 10 секунд с включением фонаря) и имеет те же преимущества и ограничения.
Библиографические данные [5]: https://www.sphinx-md.ru/netcat_files/361/584/Manual pinpointer_SPHINX_03_2023_line_002_Short_ver_01_RU.pdf (дата обращения 20.06.2023 г.).
Наиболее близким решением по технической сущности и совокупности технических признаков является ручной металлодетектор ХР MI-6 [6]. Металлодетектор выполнен в портативном корпусе, предназначенном для ручного использования, внутри которого размещены первичный преобразователь, источник питания, электронная схема. Электронная схема содержит блок двунаправленной беспроводной связи, обеспечивающий настройку, мониторинг и контроль металлодетектора с помощью удаленного совместимого устройства. На поверхность корпуса вынесены элементы управления и индикации. Удаленными совместимыми устройствами в данном случае выступают электронные блоки металлодетекторов со штангой производства ХР, а также наушники производства ХР, что в значительной степени ограничивает использование данной модели ручного металлодетектора пользователями, предпочитающими металлодетекторы со штангой других производителей.
В ХР MI-6 предусмотрен режим потери, который активируется удаленным совместимым устройством, если ручной металлодетектор находится в зоне обнаружения, в любом состоянии (включенном или выключенном), что является преимуществом данного технического решения. При этом на ручном металлодетекторе включается звуковая и световая сигнализации для более быстрого определения его местоположения.
К уязвимым местам данного технического решения относятся:
- отсутствие оперативного предупреждения пользователя о потере ручного металлодетектора - после потери ручного металлодетектора пользователь может переместиться на значительное расстояние от фактического места потери, вплоть до потери связи между ручным металлодетектором и удаленным совместимым устройством, что значительно затруднит дальнейшее определение местоположение металлодетектора, так как пользователь не будет знать в какой момент потерялся ручной металлодетектор и пропала связь;
- отсутствие активации режима потери по времени после включения, что значительно снижает вероятность определение местоположения потерянного металлодетектора при отсутствии удаленного совместимого устройства;
- в условиях сильной зашумленности (сильного ветра и т.п.) и, учитывая герметичный корпус, препятствующий прохождению звука, после активации режима потери звуковая сигнализация ручного металлодетектора может быть не слышна пользователем. Поэтому отсутствие дополнительного параметра изменяющегося пропорционально расстоянию между удаленным совместимым устройством и ручным металлодетектором, находящимся в режиме потери, также является уязвимым местом данного технического решения.
Библиографические данные [6]: https://xpmetaldetectors.com/en/produit/pinpointer-mi-6.php (дата обращения 20.06.2023 г.).
Раскрытие сущности изобретения
Задачей технического решения является создание ручного металлодетектора, используемого в сочетании с удаленным совместимым устройством, которое имеет возможность оценивать показатели качества беспроводной связи между ними, зависящие от расстояния, и формировать сигнализацию для определения пользователем удаленности от ручного металлодетектора в случае его потери.
Технический результат заключается в повышении вероятности и уменьшении времени определения местоположения потерянного ручного металлодетектора и, как следствие, повышении эффективности локализации найденного металлодетектором со штангой металлического объекта в среде поиска. Под эффективностью локализации понимается время, которое тратит пользователь на точное определение местоположения найденного металлического объекта основным металлодетектором со штангой. Поиск без ручного металлодетектора (пинпоинтера) значительно увеличивает это время, что ведет к уменьшению исследуемой площади за заданной интервал времени.
Технический результат обеспечивается тем, что КОМПЛЕКС УСТРОЙСТВ ДЛЯ УДАЛЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РУЧНОГО МЕТАЛЛОДЕТЕКТОРА состоит из удаленного совместимого устройства и ручного металлодетектора, включающего размещенные в портативном корпусе первичный преобразователь, источник питания, электронную схему с блоком двунаправленной беспроводной связи между ручным металлодетектором и удаленным совместимым устройством, которое обеспечивает настройку, мониторинг и контроль ручного металлодетектора. При этом удаленное совместимое устройство имеет возможность оценивать показатели качества беспроводной связи удаленного совместимого устройства с ручным металлодетектором, зависящие от расстояния между ними, и формировать аудиальную, световую и тактильную сигнализацию в любом сочетании для определения пользователем удаленности от потерянного ручного металлодетектора.
Для реализации СПОСОБА ДЛЯ УДАЛЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РУЧНОГО МЕТАЛЛОДЕТЕКТОРА пользователь с помощью удаленного совместимого устройства следит за одним или несколькими показателями качества беспроводной связи с ручным металлодетектором, изменяющимися пропорционально расстоянию между удаленным совместимым устройством и ручным металлодетектором. При этом удаленное совместимое устройство формирует аудиальную, световую и тактильную сигнализацию в любом сочетании, по которой пользователь определяет удаленность от потерянного ручного металлодетектора.
Краткое описание чертежей
Конструкция КОМПЛЕКСА УСТРОЙСТВ и принцип осуществления СПОСОБА ДЛЯ УДАЛЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РУЧНОГО МЕТАЛЛОДЕТЕКТОРА поясняется следующими фигурами:
На Фиг. 1 представлен Чертеж общего вида ручного металлодетектора с функцией удаленного определения местоположения;
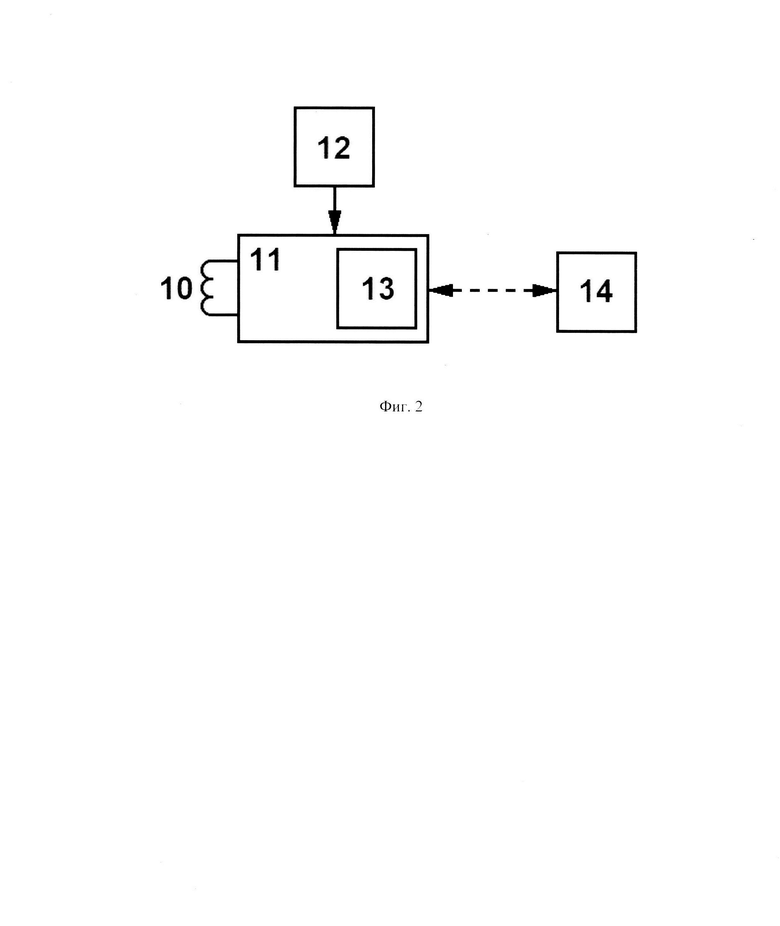
На Фиг. 2 представлена Структурная схема ручного металлодетектора с функцией удаленного определения местоположения;
На Фиг. 3 представлен Вариант отображения значения RSSI в приложении для смартфона, использующегося в качестве удаленного совместимого устройства;
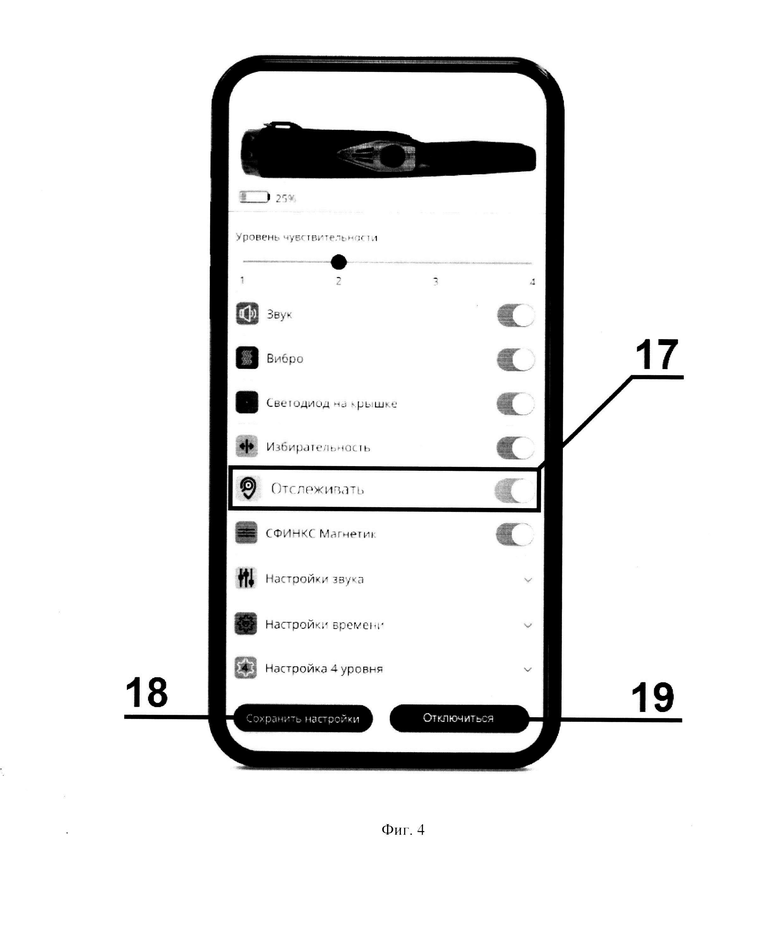
На Фиг. 4 представлен Вариант отображения на экране смартфона, использующегося в качестве удаленного совместимого устройства, текущих настроек ручного металлодетектора, где: 1 - портативный корпус, 2 - поисковый элемент металлодетектора, 3 - ребро жесткости корпуса, 4 - проушина для крепления страховочного шнура, 5 - крышка корпуса, 6 - кнопка управления, 7 - герметичная звуковая камера, 8 - световой индикатор состояния ручного металлодетектора/фонарь, 9 - световой индикатор обнаружения металлических объектов / индикатор статуса подключения к удаленному совместимому устройству, 10 - первичный преобразователь, 11 - электронная схема, 12 - источник питания, 13 - блок двунаправленной беспроводной связи, 14 - удаленное совместимое устройство, 15 - смартфон, использующийся в качестве удаленного совместимого устройства, 16 - отображение на удаленном совместимом устройстве (смартфоне) показателя качества связи, 17 - поле включения/выключения функции отслеживания, 18 - кнопка сохранения настроек, 19 -кнопка разрыва беспроводной связи.
Осуществление изобретения
В отличие от известных технических решений КОМПЛЕКС УСТРОЙСТВ ДЛЯ УДАЛЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РУЧНОГО
МЕТАЛЛОДЕТЕКТОРА включает удаленное совместимое устройство и ручной металлодетектор, содержащий размещенные в портативном корпусе первичный преобразователь, источник питания, электронную схему с блоком двунаправленной беспроводной связи между ручным металлодетектором и удаленным совместимым устройством. Удаленное совместимое устройство обеспечивает настройку, мониторинг и контроль ручного металлодетектора и имеет возможность оценивать показатели качества беспроводной связи удаленного совместимого устройства с ручным металлодетектором, зависящие от расстояния между ними, и формировать аудиальную, световую и тактильную сигнализацию в любом сочетании для определения пользователем удаленности от потерянного ручного металлодетектора.
Ручной металлодетектор с функцией удаленного определения местоположения способен переходить в режим потери из включенного состояния по истечении определенного интервала времени, а также из любого состояния по команде от удаленного совместимого устройства. При этом расстояние между удаленным совместимым устройством и ручным металлодетектором оценивается через показатель качества связи.
Ручной металлодетектор с функцией удаленного определения местоположения предназначен для ручного использования и выполнен в герметичном портативном корпусе (1), внутри которого размещены первичный преобразователь (10), источник питания (12), электронная схема (11). Электронная схема содержит блок двунаправленной беспроводной связи (13), обеспечивающий настройку, мониторинг и контроль металлодетектора с помощью удаленного совместимого устройства (14). Блок беспроводной связи дополнительно используется для определения местоположения металлодетектора через оценку качества связи удаленным совместимым устройством. На поверхность корпуса вынесены элементы управления (6) и индикации (7, 8, 9).
Режим потери - режим, характеризующийся включением различных сочетаний звуковой и световой индикаций ручного металлодетектора для более легкого аудиального и визуального определения его местоположения. При этом индикации могут быть как непрерывными, так и периодическими. Активизация режима потери может происходить во включенном состоянии ручного металлодетектора по истечении определенного интервала времени, а также из любого состояния ручного металлодетектора по команде от удаленного совместимого устройства. Активизация режима потери по времени может осуществляться:
- при истечении определенного интервала времени после включения ручного металлодетектора;
- при истечении определенного интервала времени после последнего воздействия на органы управления ручного металлодетектора и/или при истечении определенного интервала времени после срабатывания на металлический объект.
Блок двунаправленной беспроводной связи может использовать как стандартизованные технологии беспроводной передачи данных, такие как Wi-Fi, Bluetooth и пр., так и любые не стандартизованные.
В качестве удаленного беспроводного устройства может быть использовано любое устройство, имеющее средства обеспечения двунаправленной беспроводной связи, совместимые с ручным металлодетектором. Под совместимостью понимается возможность двунаправленного обмена данными между ручным металлодетектором и удаленным беспроводным устройством. Для индикации статуса подключения, качества связи и других показателей удаленное совместимое устройство может содержать визуальные, тактильные и аудиальные индикаторы в различных сочетаниях, например, светодиоды, дисплей, звуковой динамик и пр. К таким устройствам могут относиться: смартфоны, планшеты, одноплатные компьютеры, электронные блоки и наушники металлодетекторов со штангой и прочие совместимые устройства, способные каким-либо образом индицировать качество беспроводной связи.
В отличие от известных технических решений для реализации СПОСОБА ДЛЯ УДАЛЕННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РУЧНОГО МЕТАЛЛОДЕТЕКТОРА пользователь с помощью удаленного совместимого устройства следит за одним или несколькими показателями качества беспроводной связи с ручным металлодетектором, изменяющимися пропорционально расстоянию между удаленным совместимым устройством и ручным металлодетектором. При этом, удаленное совместимое устройство формирует аудиальную, световую и тактильную сигнализацию в любом сочетании, по которой пользователь определяет удаленность от потерянного ручного металлодетектора.
В процессе определения местоположения потерянного ручного металлодетектора, происходит передача данных между металлодетектором и удаленным совместимым устройством. Удаленное совместимое устройство с помощью программного обеспечения, установленного на нем, оценивает качество связи по одному или нескольким показателям и формирует аудиальную и/или световую, и/или тактильную сигнализацию, по которой пользователь может определить удаленность от потерянного ручного металлодетектора. Соответственно, чем качество связи выше, тем потерянный ручной металлодетектор ближе к удаленному совместимому устройству.
К показателям качества связи относятся все параметры сигнала, передаваемого между ручным металлодетектором и удаленным совместимым устройством, зависящие от расстояния между ними. К таким показателям относятся, но не ограничиваются ими:
- RSSI (ReceivedSignalStrengthlndicator) - показатель уровня мощности принимаемого сигнала (полезного вместе с шумом);
- RSRP (ReferenceSignalReceivedPower) - показатель уровня мощности только полезного сигнала;
- SINR (Signallnterference+NoiseRatio), также называемый CINR (Carrier to Interference+Noise Ratio) - отношение уровня полезного сигнала к уровню шума (соотношение сигнал/шум).
В частном случае, удаленное совместимое устройство отслеживает с определенной периодичностью по сигналам от ручного металлодетектора, что ручной металлодетектор в любом состоянии (выключенном или включенном) находится в зоне обнаружения или показатель качества связи не выходит за установленные пределы. В случае выхода ручного металлодетектора из зоны обнаружения или выхода показателя качества связи за установленные переделы удаленное совместимое устройство оперативно оповещает пользователя (аудиальная и/или световая, и/или тактильная сигнализация) о потере ручного металлодетектора.
Возможен вариант, когда удаленное устройство содержит блок ГЛОНАСС / GPS. Тогда координаты выхода ручного металлодетектора из зоны обнаружения (опционально - совместно с датой и временем) или выхода показателя качества связи за установленные переделы записываются в память удаленного совместимого устройства, чтобы пользователь, не заметив оповещения о потере, мог вернуться на это место и начать поиск ручного металлодетектора.
Также возможен вариант, когда удаленное устройство подключено к сети интернет.Тогда координаты выхода ручного металлодетектора из зоны обнаружения (опционально - совместно с датой и временем) или выхода показателя качества связи за установленные переделы отправляются на электронную почту пользователя.
Кроме того, в одной из реализаций изобретения после возвращения пользователя в зону обнаружения ручного металлодетектора удаленное совместимое устройство в автоматическом режиме активирует режим потери ручного металлодетектора для упрощения определения его местоположения по показателю качества связи.
В другой реализации после возвращения пользователя в зону обнаружения ручного металлодетектора пользователь сам активирует режим потери ручного металлодетектора через удаленное совместимое устройство.
Дополнительно отслеживание удаленным совместимым устройством ручного металлодетектора может быть отключено пользователем, что повысит риск потери ручного металлодетектора, но положительно скажется на энергоэффективности ручного металлодетектора.
Наилучший вариант осуществления изобретения
Конструкция
Ручной металлодетектор с функцией удаленного определения местоположения состоит из портативного корпуса (1), предназначенного для ручного использования, внутри которого размещены первичный преобразователь (10), источник питания (12), электронная схема (11). На внешней поверхности корпуса (1) в задней его части размещена проушина для крепления страховочного шнура (4), а также ребро жесткости (3), расположенное в наиболее хрупкой и подверженной внешнему механическому воздействию части корпуса (1) (вдоль поискового элемента (2)). Ребро жесткости (3) имеет изменяющуюся высоту вдоль поискового элемента (2) и имеет наибольшую прочность вблизи переднего торца корпуса (1). Источник питания (12) помещается в заднюю часть корпуса, предназначенную для его ручного удержания и закрывающуюся крышкой (5).
Первичный преобразователь (10) в виде одной катушки индуктивности, намотанной на ферритовый сердечник, расположен в поисковом элементе корпуса (2), позволяющем осуществлять свободный поиск металлических объектов в исследуемой среде.
Электронная схема металлодетектора (11) располагается в задней части корпуса (1). Ручное управление металлодетектором осуществляется с помощью кнопки управления (6). Рядом с кнопкой управления (6) располагается звуковой элемент, представляющий собой герметичную звуковую камеру (7), с внутренней стороны которой располагается электромагнитный акустический преобразователь, обеспечивающий аудиальную сигнализацию ручного металлодетектора.
В месте примыкания поискового элемента (2) к задней части корпуса (1) размещен многоцветный световой индикатор состояния ручного металлодетектора (8). Кроме того, при необходимости световой индикатор выполняет функцию фонаря, освещая исследуемую среду.
В крышке корпуса (5) расположен многоцветный световой индикатор обнаружения металлических объектов и статуса подключения (9) к удаленному совместимому устройству (14).
В качестве удаленного совместимого устройства (14) используется смартфон (15). Данный тип устройств по совокупности технических характеристик, разнообразию методов индикации, доступности и распространенности является наилучшим вариантом для достижения задачи описываемого технического решения.
Электронная схема (11) содержит блок двунаправленной беспроводной связи (13), основанный на технологии Bluetooth. Преимуществами данной технологии являются ее универсальность и распространенность, что позволяет использовать практически любой смартфон в качестве удаленного совместимого устройства. Кроме того, современные стандарты Bluetooth являются энергоэффективными и позволяют применять их в устройствах с батарейным питанием. Дальность беспроводной связи с применением Bluetooth составляет до 100 м, что также является достаточным расстоянием для реализации описываемого технического решения.
Описание работы устройства
Принцип работы ручного металлодетектора основан на гармоническом вихретоковом методе обнаружения скрытых металлических объектов. При появлении металлического объекта в зоне контроля поискового элемента (2) металлодетектора на объект начинает воздействовать первичное переменное электромагнитное поле, генерируемое электронной схемой (11). Так как все типы металлов (цветные и черные) обладают высокой удельной электропроводностью, под действием первичного поля в объекте образуются вихревые токи, создающие вторичное электромагнитное поле, изменяющее первичное поле. Это изменение фиксируется электронной схемой (11) ручного металлодетектора. Если изменение поля больше заданного значения, то срабатывает аудиальная и/или тактильная и/или световая сигнализация обнаружения металлических объектов.
Настройка металлодетектора может осуществляться двумя способами: ручным с помощью кнопки или через смартфон с помощью программного обеспечения (приложения). При этом для настройки ручным способом доступны только некоторые из всех настраиваемых параметров и функций, оперативное изменение которых может потребоваться в процессе поиска металлических объектов. Среди них: изменение уровня чувствительности, отстройка от мешающих факторов, включение/выключение фонаря.
Через приложение на смартфоне доступна настройка параметров и функций, не только описанных выше, но и дополнительных, среди которых есть функция «Отслеживание». Для включения/выключения функции отслеживания необходимо осуществить подключение ручного металлодетектора с функцией удаленного определения местоположения к смартфону (15) по Bluetooth. Для этого необходимо в выключенном состоянии нажать и удерживать кнопку (6) на ручном металлодетекторе до момента включения красного светового индикатора статуса подключения к удаленному совместимому устройству (9). После этого необходимо запустить приложение на смартфоне (15) и нажать кнопку «Подключиться». В случае успешного установления соединения индикатор статуса подключения к удаленному совместимому устройству (9) загорится зеленым цветом и на экране смартфона (15) отобразятся текущие настройки ручного металлодетектора. Вариант отображения текущих настроек ручного металлодетектора на экране смартфона представлен на Фиг. 4. Для включения/выключения функции отслеживания необходимо поставить/снять флажок напротив надписи «Отслеживать» (17), после чего следует последовательно нажать на кнопки в приложении «Сохранить настройки» (18) и «Отключиться» (19). Соединение пропадет и ручной металлодетектор выключится, при этом если функция отслеживания была включена, то она продолжит работать в любом состоянии ручного металлодетектора.
При включенной функции отслеживания ручной металлодетектор с интервалом 1 раз в 5 секунд отправляет широковещательные пакеты данных по беспроводному каналу связи (Bluetooth) без установки соединения. В терминах технологии Bluetooth такой режим работы блока двунаправленной беспроводной связи называется Broadcasting. Broadcasting характеризуется высокой энергоэффективностью, так как ручной металлодетектор большую часть времени находится в состоянии пониженного энергопотребления и «просыпается» на доли секунды только для отправки широковещательного пакета. Широковещательный пакет данных содержит информацию об имени ручного металлодетектора. Запущенное на смартфоне приложение анализирует широковещательные пакеты данных только от одного конкретного ручного металлодетектора. Заложенный в приложении алгоритм оценивает стандартный для технологии Bluetooth и не требующий задействования дополнительных вычислительных мощностей показатель уровня мощности принимаемого сигнала (RSSI) и, если его значение опускается ниже -70дБм или, если металлодетектор оказался вне зоны обнаружения, то на экране смартфона появляется оповещение о том, что ручной металлодетектор потерян, сопровождаемое аудиальной и тактильной сигнализациями. Кроме того, в память смартфона записываются дата, время и rjlOHACC/GPS-координаты места, где RSSI опустился ниже -70 дБм или, где металлодетектор оказался вне зоны обнаружения. Пользователь в приложении нажимает кнопку «Найти металлодетектор» и, если значение RSSI не ниже -90 дБм, то смартфон устанавливает соединение с ручным металлодетектором и отправляет ему команду для перехода в режим потери и, после получения подтверждения, разрывает соединение. Ручной металлодетектор начинает подавать звуковые и/или световые сигналы для более легкого определения его местоположения, а также сокращается интервал времени отправки в эфир широковещательных пакетов до 1 секунды. Короткий интервал времени позволяет быстрее обновлять RSSI на смартфоне и рассчитывать его среднюю величину по трем значениям, что дает более стабильный результат оценки уровня мощности принимаемого сигнала.
Вариант отображения значения RSSI (16) в приложении представлен на Фиг. 3. Пользователь, ориентируясь на полученные значения RSSI, двигается в сторону его увеличения (при этом шкала на Фиг. 3 пропорционально заполняется). Чем больше RSSI, тем ближе пользователь к потерянному ручному металлодетектору. Кроме того, в приложении предусмотрена отключаемая аудиальная сигнализация приближения к ручному металлодетектору - прерывистая звуковая сигнализация, частота которой увеличивается пропорционально значению RSSI, а значит и расстоянию до ручного металлодетектора. После обнаружения потерянного ручного металлодетектора пользователь отключает режим потери нажатием на кнопку (6) и металлодетектор возвращается к своему нормальному режиму работы. Функция отслеживания продолжает работать.
Возможен вариант, когда пользователь пропустил оповещение смартфона о потере ручного металлодетектора и передвинулся на расстояние, превышающее расстояние, на котором возможно установить беспроводную связь. В таком случае пользователь нажимает в приложении кнопку «Найти металлодетектор», копирует сохраненные в памяти смартфона ГЛОНАСС/GPS-координаты места, где RSSI опустился ниже -70 дБм, и вставляет их в любую картографическую программу. Затем с помощью этой программы перемещается в установленную точку. Если значение RSSI не ниже -90 дБм, то смартфон устанавливает соединение с ручным металлодетектором и отправляет ему команду для перехода в режим потери и, после получения подтверждения, разрывает соединение. Далее алгоритм поиска соответствует описанному ранее.
В случае, если пользователь вернулся на место, где RSSI опустился ниже -70 дБм, а соединение не устанавливается, то пользователь должен изменять свое местоположение, удаляясь от указанной точки на 20-30 м в различных направлениях до момента установления связи и появления текущего значения RSSI.
Таким образом, наилучший вариант осуществления способа удаленного определения местоположения ручного металлодетектора с помощью описанных устройств состоит из следующих этапов:
1. Пользователю пришло оповещение на смартфон, сопровождаемое аудиальной и тактильной сигнализациями, что ручной металлодетектор потерян (значение RSSI опустилось ниже -70 дБм или металлодетектор оказался вне зоны обнаружения).
2. Не отходя от места прихода оповещения, пользователь открывает запущенное на смартфоне приложение и нажимает на кнопку «Найти металлодетектор».
3. В случае, если ручной металлодетектор находится в зоне обнаружения (значение RSSI не ниже -90дБм), то смартфон устанавливает соединение с ручным металлодетектором и отправляет ему команду для перехода в режим потери и, после получения подтверждения, разрывает соединение.
4. Ручной металлодетектор начинает подавать звуковые и/или световые сигналы для более легкого определения его местоположения, а также сокращается интервал времени отправки в эфир широковещательных пакетов до 1 секунды.
5. Пользователь, ориентируясь на полученные значения RSSI, двигается в сторону его увеличения до визуального определения местоположения ручного металлодетектора.
6. Пользователь отключает режим потери нажатием на кнопку ручного металлодетектора.
В случае, если пользователь поздно увидел оповещение на смартфоне, удалившись от места его появления на значительное расстояние, когда значение RSSI ниже -90дБм или ручной металлодетектор находится вне зоны обнаружения, то:
1. Пользователь открывает запущенное на смартфоне приложение, нажимает на кнопку «Найти металлодетектор», копирует сохраненные ГЛОНАСС/GPS-координаты места, где RSSI опустился ниже -70 дБм, и вставляет их в любую картографическую программу.
2. С помощью картографической программы пользователь перемещается в установленную точку.
3. В случае, если ручной металлодетектор находится в зоне обнаружения (значение RSSI не ниже -90 дБм), то смартфон устанавливает соединение с ручным металлодетектором и отправляет ему команду для перехода в режим потери и, после получения подтверждения, разрывает соединение и далее повторяются пункты 4-6 первого варианта.
4. В случае, если пользователь вернулся на место, где RSSI опустился ниже -70 дБм, а соединение не устанавливается, то пользователь изменяет свое местоположение, удаляясь от указанной точки на 20-30 м в различных направлениях до момента установления связи и далее повторяются пункты 4-6 первого варианта.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНОЙ ДЕТЕКТОР С БЕСПРОВОДНОЙ ПЕРЕДАЧЕЙ И ПРИЕМОМ ДАННЫХ | 2019 |
|
RU2714524C1 |
| РУЧНОЙ МЕТАЛЛОДЕТЕКТОР, АКТИВИЗИРУЕМЫЙ ЧЕХЛОМ | 2020 |
|
RU2756834C1 |
| СИСТЕМА ДОСМОТРА С БЕСПРОВОДНОЙ ПЕРЕДАЧЕЙ ДАННЫХ | 2019 |
|
RU2711177C1 |
| Аппарат для определения местоположения устройства, генерирующего аэрозоль | 2018 |
|
RU2721788C1 |
| ПОРТАТИВНАЯ ОХРАННАЯ СИСТЕМА НА ОСНОВЕ БЕСПРОВОДНОЙ РАДИОСВЯЗИ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2005 |
|
RU2297670C1 |
| Способ мониторинга профессиональной надёжности | 2022 |
|
RU2825116C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТЕЛЕФОНА КАК КЛЮЧА НА ОСНОВЕ ОБНАРУЖЕНИЯ ОБЪЕКТА, СООТВЕТСТВУЮЩИЕ ТРАНСПОРТНОЕ СРЕДСТВО И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2018 |
|
RU2704769C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРИЕНТИРОВАНИЯ ИНВАЛИДОВ ПО ЗРЕНИЮ В ЗАМКНУТОМ И ОТКРЫТОМ ПРОСТРАНСТВАХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2737914C2 |
| СПОСОБ ПО ВЫЯВЛЕНИЮ И ЛОКАЛИЗАЦИИ УСТРОЙСТВ, ОКАЗЫВАЮЩИХ НЕГАТИВНЫЕ ВОЗДЕЙСТВИЯ НА ПОЛЬЗОВАТЕЛЬСКИЕ УСТРОЙСТВА СИСТЕМЫ СВЯЗИ LTE, NR | 2022 |
|
RU2809721C2 |
| УСТРОЙСТВО СЕТЕВОГО ПЕРЕКЛЮЧЕНИЯ И СПОСОБ РАБОТЫ УСТРОЙСТВА СЕТЕВОГО ПЕРЕКЛЮЧЕНИЯ | 2020 |
|
RU2751083C1 |


Изобретения относятся к обнаружению скрытых в диэлектрических или имеющих слабую электрическую проводимость средах объектов из цветных и черных металлов. Технический результат: повышение вероятности определения местоположения потерянного ручного металлодетектора. Сущность: комплекс устройств для определения местоположения ручного металлодетектора состоит из удаленного совместимого устройства и ручного металлодетектора, включающего размещенные в портативном корпусе первичный преобразователь, источник питания, электронную схему. Электронная схема содержит блок двунаправленной беспроводной связи, обеспечивающий настройку, мониторинг и контроль металлодетектора с помощью удаленного совместимого устройства. Удаленное совместимое устройство имеет возможность оценивать показатели качества беспроводной связи удаленного совместимого устройства с ручным металлодетектором, зависящие от расстояния между ними, и формировать аудиальную, световую и тактильную сигнализацию в любом сочетании для определения пользователем удаленности от потерянного ручного металлодетектора. Способ характеризуется тем, что пользователь с помощью удаленного совместимого устройства следит за одним или несколькими показателями качества беспроводной связи с ручным металлодетектором, изменяющимися пропорционально расстоянию между удаленным совместимым устройством и ручным металлодетектором. Удаленное совместимое устройство формирует аудиальную, световую и тактильную сигнализацию в любом сочетании, по которой пользователь определяет удаленность от потерянного ручного металлодетектора. 2 н. и 11 з. п. ф-лы, 4 ил.
1. Комплекс устройств для удаленного определения местоположения ручного металлодетектора в составе удаленного совместимого устройства и ручного металлодетектора, включающего размещенные в портативном корпусе первичный преобразователь, источник питания, электронную схему с блоком двунаправленной беспроводной связи между ручным металлодетектором и удаленным совместимым устройством, которое обеспечивает настройку, мониторинг и контроль ручного металлодетектора, отличающийся тем, что удаленное совместимое устройство имеет возможность оценивать показатели качества беспроводной связи удаленного совместимого устройства с ручным металлодетектором, зависящие от расстояния между ними, и формировать аудиальную, световую и тактильную сигнализацию в любом сочетании для определения пользователем удаленности от потерянного ручного металлодетектора.
2. Комплекс устройств по п. 1, отличающийся тем, что блок двунаправленной беспроводной связи использует технологию Bluetooth для беспроводной передачи данных.
3. Комплекс устройств по п. 1, отличающийся тем, что в качестве удаленного совместимого устройства используется смартфон.
4. Комплекс устройств по п. 1, отличающийся тем, что удаленное совместимое устройство содержит блок ГЛОНАСС/GPS и координаты выхода ручного металлодетектора из зоны обнаружения или выхода показателя качества связи за установленные пределы записываются в память удаленного совместимого устройства.
5. Комплекс устройств по п. 4, отличающийся тем, что удаленное устройство подключено к сети интернет и координаты выхода ручного металлодетектора из зоны обнаружения или выхода показателя качества связи за установленные пределы отправляются на электронную почту пользователя.
6. Способ для удаленного определения местоположения ручного металлодетектора, включающий передачу данных между ручным металлодетектором и удаленным совместимым устройством, отличающийся тем, что пользователь с помощью удаленного совместимого устройства следит за одним или несколькими показателями качества беспроводной связи с ручным металлодетектором, изменяющимися пропорционально расстоянию между удаленным совместимым устройством и ручным металлодетектором, при этом удаленное совместимое устройство формирует аудиальную, световую и тактильную сигнализацию в любом сочетании, по которой пользователь определяет удаленность от потерянного ручного металлодетектора.
7. Способ по п. 6, отличающийся тем, что удаленное совместимое устройство оценивает качество беспроводной связи по показателю уровня мощности принимаемого сигнала RSSI.
8. Способ по п. 6, отличающийся тем, что удаленное совместимое устройство оценивает качество беспроводной связи по показателю уровня мощности только полезного сигнала RSRP.
9. Способ по п. 6, отличающийся тем, что удаленное совместимое устройство оценивает качество беспроводной связи по отношению уровня полезного сигнала к уровню шума.
10. Способ по п. 6, отличающийся тем, что удаленное совместимое устройство отслеживает с определенной периодичностью по сигналам от ручного металлодетектора, что ручной металлодетектор в любом состоянии, выключенном или включенном, находится в зоне обнаружения или показатель качества связи не выходит за установленные пределы.
11. Способ по п. 6, отличающийся тем, что удаленное совместимое устройство оперативно оповещает пользователя с помощью аудиальной, световой и тактильной сигнализации в любом сочетании о потере ручного металлодетектора в случае выхода ручного металлодетектора из зоны обнаружения или выхода показателя качества связи за установленные пределы.
12. Способ по п. 6, отличающийся тем, что после возвращения пользователя в зону обнаружения ручного металлодетектора удаленное совместимое устройство в автоматическом режиме активирует режим потери ручного металлодетектора.
13. Способ по п. 6, отличающийся тем, что отслеживание удаленным совместимым устройством ручного металлодетектора может быть отключено пользователем.
| РУЧНОЙ ДЕТЕКТОР С БЕСПРОВОДНОЙ ПЕРЕДАЧЕЙ И ПРИЕМОМ ДАННЫХ | 2019 |
|
RU2714524C1 |
| US 7940049 B2, 10.05.2011 | |||
| US 9347798 B1, 24.05.2016 | |||
| US 10690797 B2, 23.06.2020. | |||
