Изобретение относится к средствам безопасного передвижения в замкнутом и открытом пространствах, преодоления препятствий на маршруте, ориентации в незнакомой среде, улучшения качества жизнедеятельности инвалидов по зрению и их социализации. Данное изобретение может применяться другими пользователями, например: людьми с ослабленным зрением, для обеспечения безопасности детей, пожилых людей, животных, транспорта, для контроля и управления беспилотными системами и т.д.
Известен способ ориентации в пространстве, навигации и информирования людей с нарушением зрительных функций (патент RU 2503436, опубликовано: 10.01.2014), заключающийся в том, что с помощью, по меньшей мере, одного радиомаяка, размещаемого, по меньшей мере, в одном месте ориентации, передают радиосигналы, а с помощью находящегося у человека, по меньшей мере, одного радиоинформатора принимают эти радиосигналы и передают их на устройство воздействия на человека, сигнализируя о близком нахождении места ориентации, отличающийся тем, что первоначально с помощью, по меньшей мере, одного радиоинформатора передают радиосигналы, а передачу радиосигналов с помощью, по меньшей мере, одного радиомаяка осуществляют после приема им радиосигналов от радиоинформатора, информирующих о нахождении человека в зоне обнаружения, причем при приеме радиосигнала радиоинформатором измеряют интенсивность принятого радиосигнала и в зависимости от него изменяют значение параметра воздействия на человека, и по изменению значения параметра воздействия определяют направление приближения к радиомаяку.
При приближении человека к радиомаяку с помощью последнего передают сигнал для точного ориентирования, после остановки человека непосредственно перед радиомаяком с помощью последнего передают, а с помощью радиоинформатора принимают и передают на устройство воздействия на человека информацию о направлении, в котором находится, по меньшей мере, один объект, который может представлять интерес для человека.
Местом для ориентации для размещения радиомаяка является место рядом с входной дверью общественного транспортного средства, при этом при появлении человека с радиоинформатором в зоне обнаружения с помощью радиомаяка передают человеку радиосигнал с сообщением о транспортном средстве и посредством световой или звуковой индикации передают водителю транспортного средства сигнал о том, что транспортное средство находится в зоне действия одного из радиоинформаторов человека с нарушением зрительных функций, после остановки человека непосредственно перед радиомаяком - перед дверью транспортного средства с помощью радиомаяка передают водителю посредством световой или звуковой индикации сигнал о том, что человек с нарушением зрительных функций начал поиск входной двери и перемещается к ней.
Местом для ориентации для размещения радиомаяка также являются остановки общественного транспорта, и передачу радиосигнала с помощью радиомаяка, размещенного рядом с входной дверью общественного транспорта, осуществляют в случае получения сигнала также и от радиомаяка, размещенного на остановке общественного транспорта.
Указанный способ использует систему для ориентации в пространстве, навигации и информирования людей с нарушением зрительных функций, содержащую, по меньшей мере, один радиомаяк для размещения в месте ориентации и, по меньшей мере, один радиоинформатор, находящийся у человека, при этом, по меньшей мере, один радиомаяк включает источник и приемник радиосигналов и соединенный с ними блок управления, который соединен с источником звуковых сигналов, а радиоинформатор включает источник и приемник радиосигналов и соединенный с ними блок управления, который соединен с устройством воздействия на человека, отличающуюся тем, что блок управления радиомаяка выполнен с функцией включения источника радиосигнала после приема радиосигнала от радиоинформатора приемником радиосигналов радиомаяка, а блок управления радиоинформатора выполнен с функцией измерения интенсивности принимаемого радиосигнала и изменения в устройстве воздействия на человека значения параметра воздействия в зависимости от измеренной интенсивности. Блок управления радиомаяка через усилитель-формирователь импульсов соединен с рамочной катушкой, а блок управления радиоинформатора через усилитель-формирователь импульсов соединен с рамочной резонансной антенной. Радиомаяк включает блок измерения уровня шума, содержащий микрофон, который через микрофонный усилитель соединен с блоком управления радиомаяка. Устройство воздействия на человека выполнено в виде источников звуковых и/или вибросигналов и соединено с блоком управления радиоинформатора через усилитель низкой частоты. Блок управления радиоинформатора соединен с блоком флэш-памяти.
Технической проблемой аналога является потребность в использовании радиомаяков, которые требуется устанавливать вдоль предполагаемых маршрутов инвалидов по зрению. Тем самым, инвалиды вынуждены ограничивать свои передвижения строго по маршрутам, где установлены такие радиомаяки и не могут совершать путешествия по любому направлению. Кроме того, инвалид не видит и не знает об иных стационарных и динамических препятствиях, которые встречаются у него на пути к цели.
Наиболее близким аналогом является способ информирования инвалидов о наличии близлежащих стационарных объектов и определения необходимого направления движения к этим объектам (патент RU 2582045, опубликовано: 20.04.2016), состоящий в размещении на стационарных объектах стационарных радиоинформаторов и размещении на инвалидах носимых абонентских устройств, автоматической передаче носимым абонентским устройством в радиоэфир сигнала запроса, по получении которого каждый стационарный радиоинформатор, находящийся в данный момент в зоне действия абонентского устройства, передает в радиоэфир ответ, содержащий его персональные данные, а абонентское устройство поочередно получает и запоминает полученные ответы от всех стационарных радиоинформаторов, находящихся в данный момент в зоне действия этого абонентского устройства, и автоматически направляет сигнал запроса на передачу информации стационарному радиоинформатору, который по получении этого сигнала запроса передает в радиоэфир сообщение о стационарном объекте, на котором он установлен, а абонентское устройство воспроизводит полученную от этого стационарного радиоинформатора информацию в виде звуковых повторяющихся сообщений, при этом стационарный радиоинформатор стационарного объекта подает звуковой сигнал ориентирования, по которому инвалид определяет необходимое направление движения к выбранному им стационарному объекту, отличающийся тем, что сигнал запроса абонентского устройства содержит его персональные данные, каждый стационарный радиоинформатор передает в радиоэфир ответ со случайной задержкой, а абонентское устройство автоматически направляет сигнал запроса тому стационарному радиоинформатору, ответ от которого был получен первым, при этом при отсутствии необходимости инвалида в этом стационарном объекте его абонентское устройство по команде инвалида направляет сигнал запроса на передачу информации стационарному радиоинформатору, ответ от которого был получен вторым, поочередные по командам инвалида передачи сигналов запросов на все стационарные радиоинформаторы, находящиеся в данный момент в зоне действия абонентского устройства, осуществляют до тех пор, пока инвалидом не будет сделан выбор необходимого ему стационарного объекта, после чего абонентское устройство по команде инвалида передает в радиоэфир сигнал выбора стационарного радиоинформатора. Способ функционирует с использованием системы, содержащей стационарные радиоинформаторы, установленные на стационарных объектах, и носимые абонентские устройства, при этом каждый из стационарных радиоинформаторов включает блок хранения сжатых звуковых файлов, блок формирования, обработки и хранения информации, блок приема от абонентских устройств сигналов запроса, сигналов разрешения на передачу информации и сигналов вызова, блок формирования звукового сигнала ориентирования, радиоантенну и приемопередатчик, а каждое носимое абонентское устройство включает средства тактильного воздействия, блок обработки и хранения информации, блок формирования передаваемых стационарным радиоинформатором сигналов запроса, сигналов разрешения на передачу информации, сигналов вызова и сигнала выбора стационарного радиоинформатора, блок преобразования полученной от стационарных радиоинформатора цифровой информации в аналоговое речевое сообщение, средства воспроизведения речевой информации, радиоантенну и приемопередатчик.
Технической проблемой прототипа является потребность в затрате времени на обмен сигналами между абонентским устройством инвалида и стационарными радиоинформаторами, потребность в выборе инвалидом необходимого ему стационарного объекта. Проблема связана с тем, что обмен радиосигналами может вестись с ошибками вследствие наличия препятствий между ближайшим радиоинформатором и абонентским устройством инвалида. В результате, устанавливается связь с другим радиоинформатором, который может не являться основной целью передвижения инвалида. Кроме того, выбранный инвалидом радиоинформатор подает звуковой сигнал ориентирования, по которому инвалид определяет необходимое направление движения к выбранному им стационарному объекту. Но при этом инвалид не видит и не знает об иных стационарных и динамических препятствиях, которые встречаются у него на пути к цели.
Задачей изобретения является устранение технических проблем известных решений и обеспечение инвалиду по зрению возможности самостоятельно выбирать себе маршрут передвижения.
Техническим результатом изобретения является возможность самостоятельно передвигаться слепому человеку, как в городских условиях, так и помещениях, например в магазине, выбирать цель в любом направлении в пределах работы системы покрытия связи. Также обеспечивается оповещение инвалида на крупные предметы и объекты, которые встречаются ему на пути с ориентацией дистанции и направления на них. Также исключается потребность в использовании радиоинформаторов или радиомаяков.
Указанный технический результат достигается за счет того, что заявлен способ обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах, состоящий из обеспечения видео сопровождения, голосового сопровождения, позиционирования, определения структуры дорожного покрытия, препятствий, объектов и их свойств и местоположения и размещении на инвалидах или других категорий пользователей носимых абонентских устройств, определяющих структуру дорожного покрытия и наличия препятствий, передающих цифровые данные о физиологическом состоянии инвалида по радио каналу, передающих видеосигнал по радиоканалу, по получении которого диспетчер передает на абонентское устройство инвалида, по средствам радио голосовой связи необходимые команды с подробным описанием объектов окружающей среды и препятствий, а также направления движения и взаимодействия с окружающими предметами и объектами, отличающийся тем, что инвалида оснащают видеокамерами заднего и переднего обозрения и возможностью стерео съемки, обеспечивающие обзор в 360 градусов, блоком определения направления, дальности и свойств препятствий и дорожного покрытия, функционирующем на принципе лазерной триангуляции, а диспетчерский центр оснащают приемником видеосигналов, монитором, приемником-передатчиком аудио-сигнала и цифровых данных, где диспетчер, получающий видеосигнал от инвалида, информацию о препятствиях и дорожном покрытии, которую отображают на экране монитора, корректирует передвижение инвалида по маршруту посредством радио голосовой связи, рассказывая инвалиду о том, что происходит вокруг, описывая словами объекты и препятствия, контролируя психологическое состояния инвалида, путем анализа физиологических показателей; при этом, для обеспечения бесперебойной радиосвязи максимального радиуса действия между инвалидом и диспетчером применяют радио-ретрансляторы; при отсутствии от диспетчера голосовых команд, с помощью вычислительно-регистрационного блока передают инвалиду через наушник аудио-сигнал, определяющий штатную работу системы; в случае отсутствия аудио-сигнала, определяющего штатную работу системы, либо в случае отсутствия голосовых команд от диспетчера, инвалид должен остановиться, фиксируя нештатную ситуацию.
Допустимо, что в качестве диспетчера используют автоматизированного голосового робота, который зачитывает сведения о препятствиях и дорожном покрытии в виде названий объектов, направлении и расстояниях до них, которые предварительно автоматически распознаются с видеоизображения и трансформируются в цифровые объекты определенной формы и находящиеся на определенной дистанции от инвалида. Допустимо, что расстояние и свойства объектов, а также качество дорожного покрытия определяют посредством проецирования лазерных лучей перед пользователем; отражающийся от дорожного покрытия и/или объектов лазерный луч искажается, а параметры отраженного луча обрабатываются датчиками PSD, CMOS, CCD и передаются по кабелю в вычислительно-регистрационный блок, в котором с помощью программного обеспечения преобразуют данные отраженного лазерного луча в геометрические параметры, применяя метод лазерной триангуляции, после чего классифицируется по типу объекта и озвучивается роботом.
Допустимо, что после определения параметров качества дорожного покрытия и объектов перед инвалидом, с помощью вычислительно-регистрационного блока передают их в цифровом кодированном виде на диспетчерский пульт, для последующей визуализации на экране диспетчера или автоматического распознавания видеоизображения. Допустимо, что при нештатной ситуации, сигнал с видеокамер передается напрямую диспетчеру, через радио модуль минуя вычислительно-регистрационный блок.
Допустимо, что в случаях потери аудио или видеосигнала между диспетчером и инвалидом, диспетчер вызывает инвалида по резервному каналу мобильной связи, используя доступные сети сотовых операторов; установив контакт по резервному каналу мобильной связи, диспетчер немедленно останавливает инвалида, отдав советующую голосовую команду; убедившись в безопасности инвалида, диспетчер запускает на своем компьютере автоматическую программу диагностики неисправностей; при завершении выполнения автоматической программы диагностики неисправностей, генерируется отчет с указанием необходимых мероприятий по их устранению, в соответствии с инструкцией, диспетчер приступает к выполнению указанных в отчете действий; при невозможности исправить проблему в течение 10-15 минут, диспетчер возвращает инвалида домой, используя резервные каналы связи, для чего диспетчер передает на смартфон инвалида, через специализированное программное обеспечение команду на включение фронтальной цифровой камеры инвалида по каналу bluetooth, изображение передается диспетчеру через смартфон по доступным сетям мобильной связи, для удаленного сопровождения инвалида на маршруте; в случае отказа цифровой фронтальной камеры инвалида, задействуют телефон с камерой, спутниковым приемником и программным обеспечением, позволяющим удаленно контролировать маршрут инвалида, используя технические возможности только телефона; в случае, отсутствия технической возможности удаленно сопровождать инвалида, диспетчер связывается с ближайшим волонтером данного района для оказания помощи; в случае невозможности получения помощи от волонтеров, вызывается экстренная служба (МЧС, МВД); а при отсутствии любых сигналах с инвалидом, диспетчер вызывает экстренные службы по последним известным координатам.
Допустимо, что при нападении на инвалида третьих лиц, животных, резкого ухудшения самочувствия, иных экстренных ситуаций угрожающих жизни и здоровью, инвалид нажимает на тревожную кнопку, расположенную на брелоке или кистевом модуле для активации тревожного сигнала; тревожный сигнал, передается на вычислительно-регистрационного блок по радиоканалу, а от с помощью вычислительно-регистрационного блока до диспетчера по цифровому радиоканалу; получив тревожный сигнал, диспетчер вызывает экстренные службы по последним известным координатам инвалида и далее действует согласно инструкции.
Также заявлена система обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах, а также других категорий пользователей, функционирующая согласно вышеописанного способа, содержащая стационарные радио ретрансляторы, пульт управления диспетчеров, и носимые абонентские устройства, при этом каждый из пультов диспетчеров включает приемник видеосигнала, радиоантенну, телевизор, монитор, блок формирования, обработки и хранения данных, приемник-передатчик аудио и цифрового сигнала, наушник, микрофон, комплект программного обеспечения, включающий цифровую навигационную карту и регистратор, а каждое носимое абонентское устройство включает средства тактильного воздействия, радиоантенну, камеры заднего и переднего обозрения с широким градусом виденья и возможностью стерео съемки, беспроводные с костной проводимостью наушники и микрофон (допустимы классические проводные наушники и микрофон), аналоговый и цифровой приемопередатчик, вычислительно-регистрационный блок, брелок или кистевой модуль с функцией бесконтактной оплаты, блок определения направления, дальности и свойств препятствий, а также структуры дорожного покрытия, датчики состояния физиологического состояния и специальный яркий знак на верхней одежде с обозначением статуса.
Краткое описание чертежей
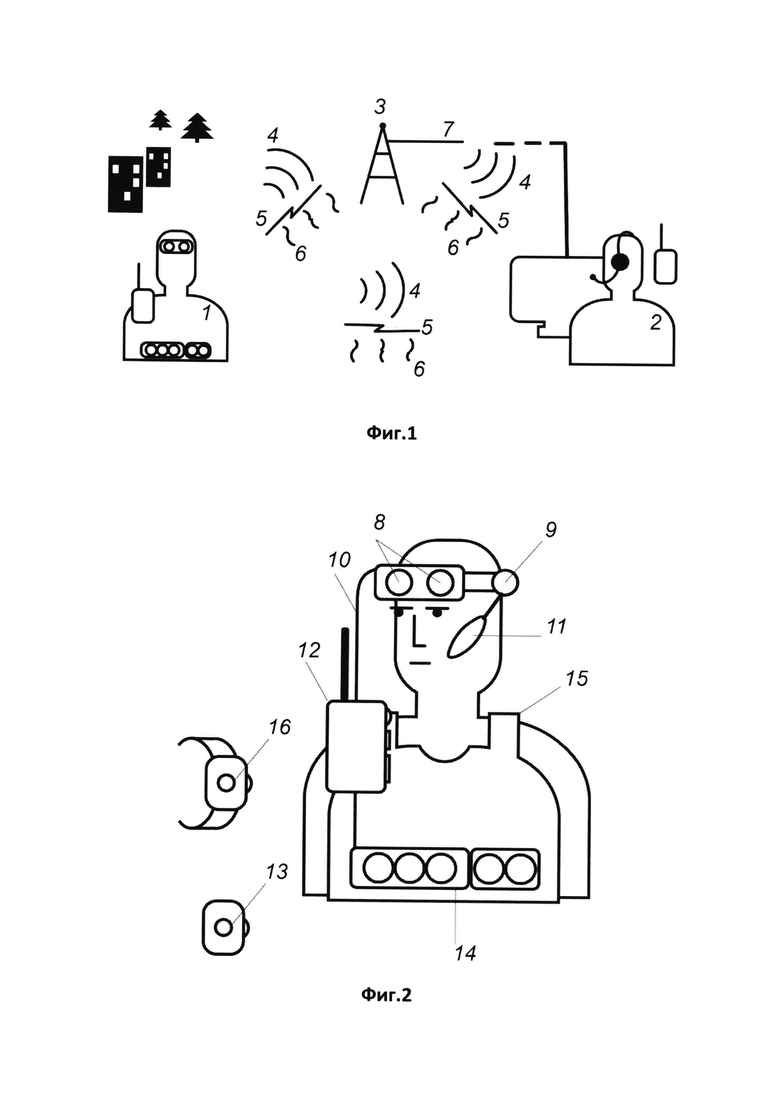
На Фиг. 1 показана общая схема принципа работы способа.
На Фиг. 2 показана схема носимого абонентского устройства.
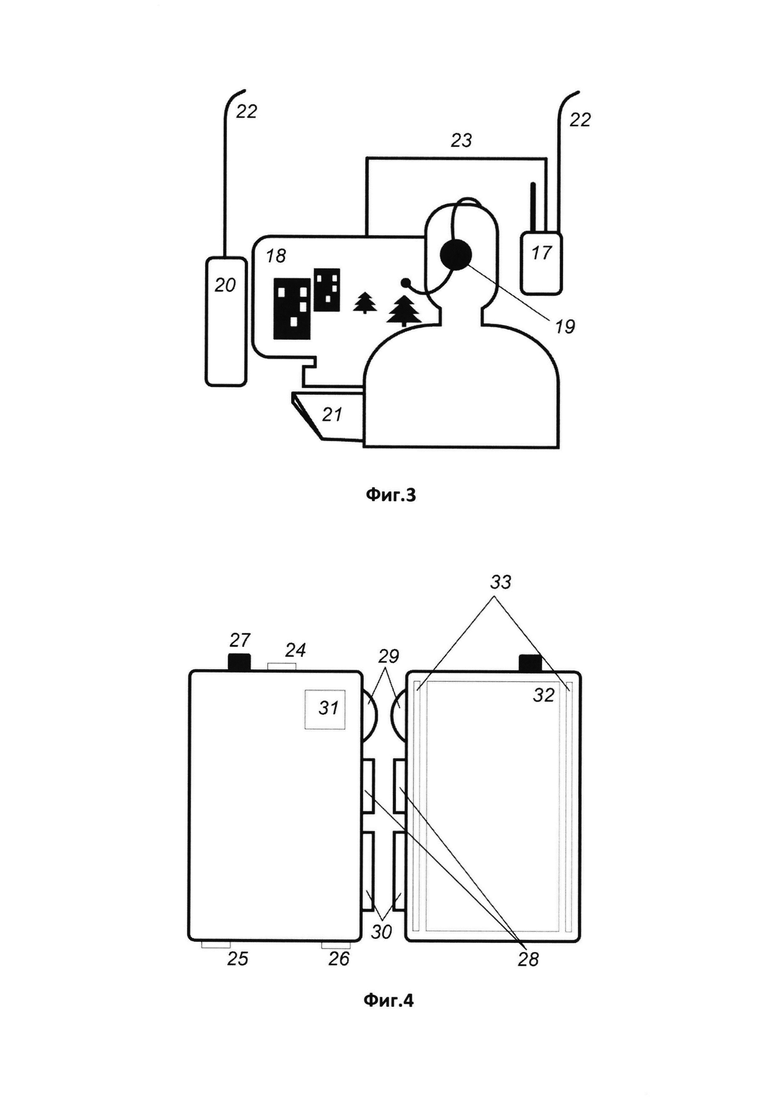
На Фиг. 3 показана схема диспетчерского центра.
На Фиг. 4 показан корпус вычислительного радио блока.
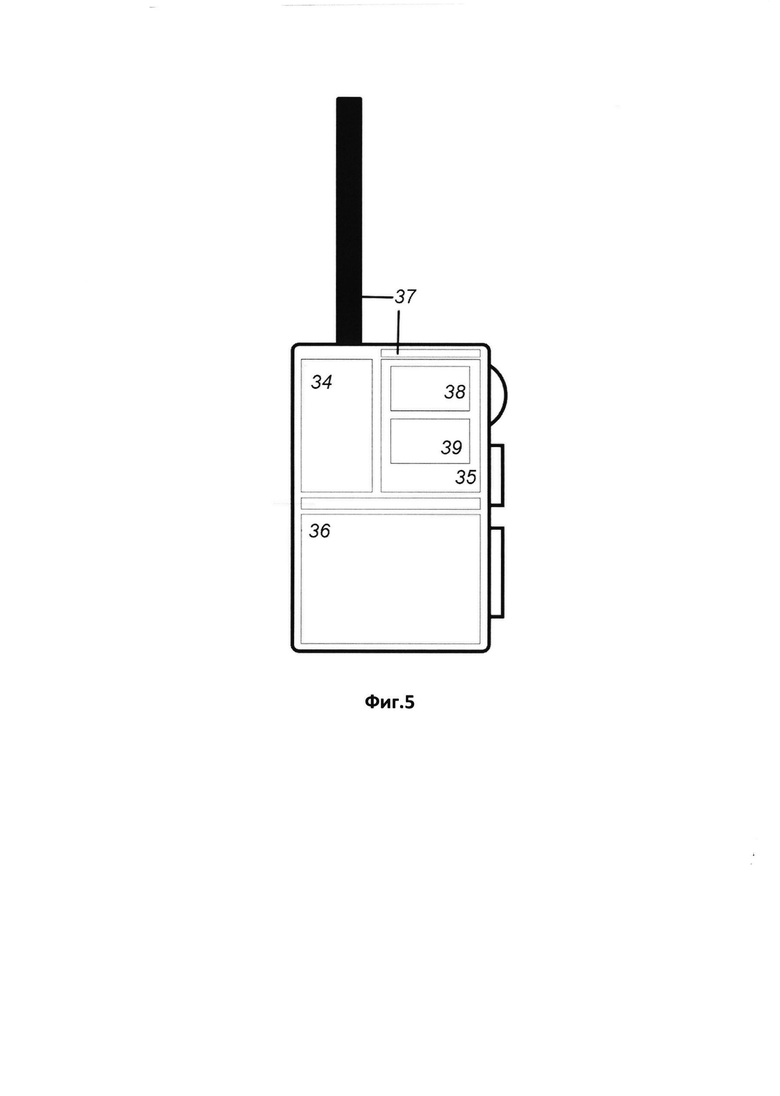
На Фиг. 5 блок-схема вычислительного радио блока.
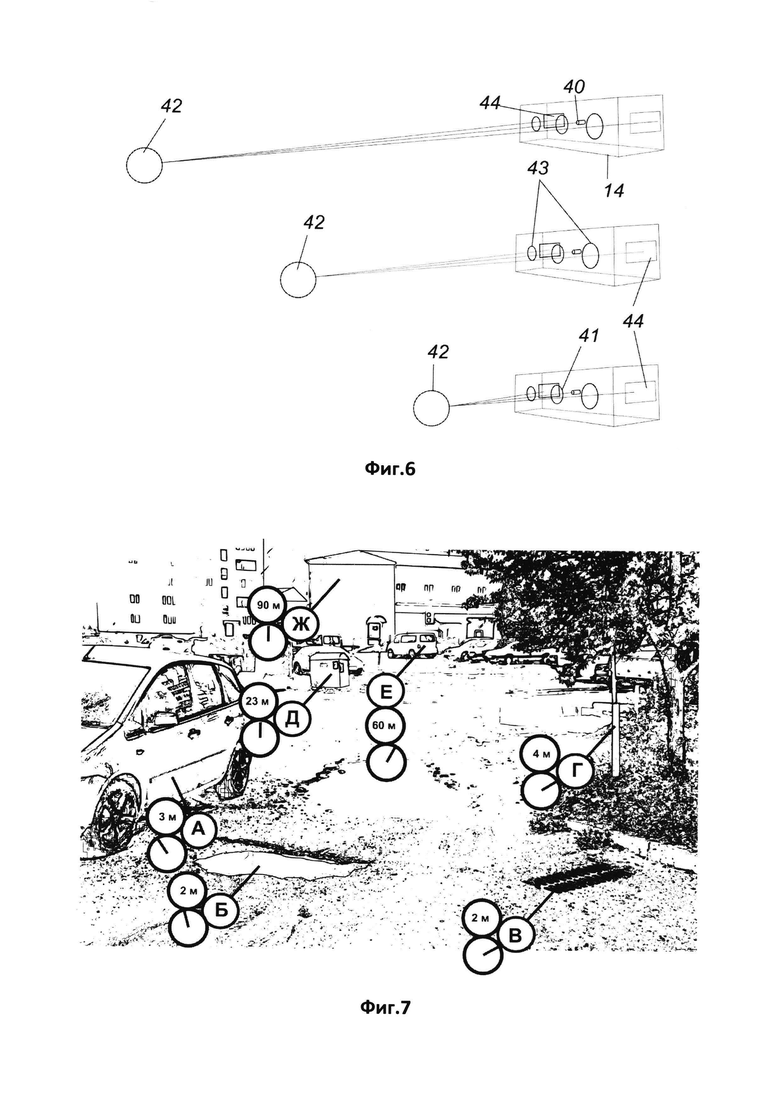
На Фиг. 6 показан принцип работы блока определения свойств и расстояния до объектов, препятствий и качества дорожного покрытия.
На Фиг. 7 показан пример отображаемых параметров на мониторе диспетчера на изображении с фронтальной камеры.
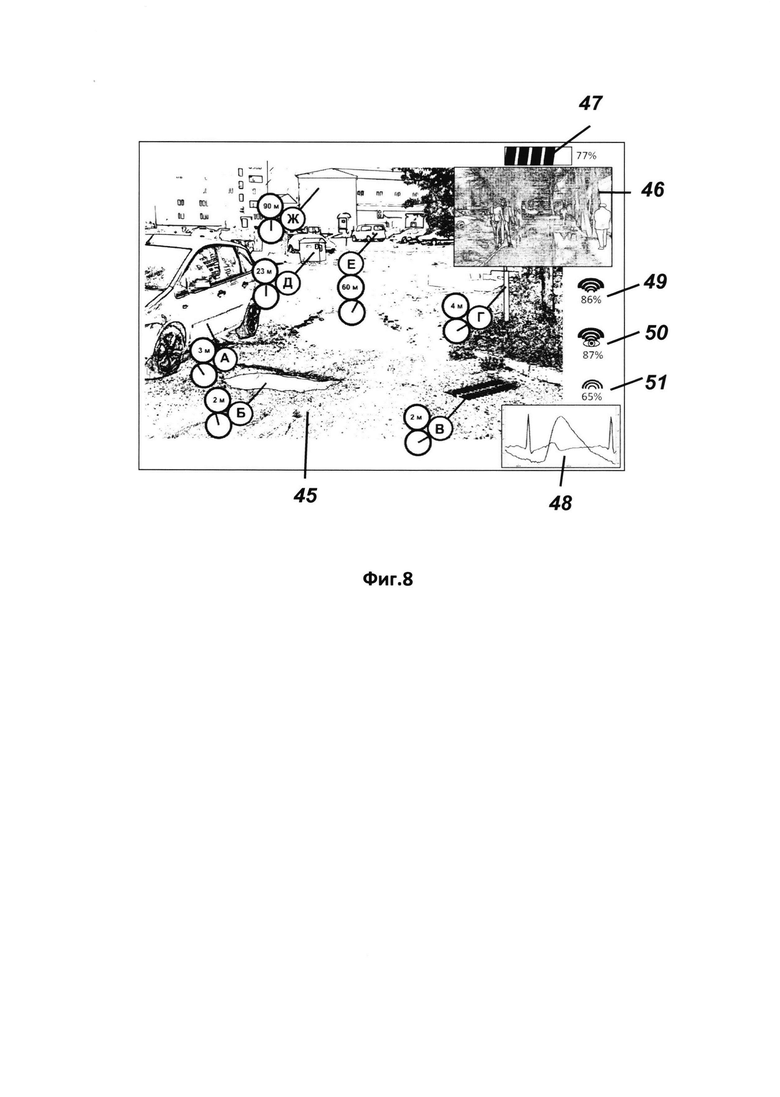
На Фиг. 8 показан пример рабочего интерфейса на мониторе диспетчера.
На чертежах: 1 - ведомый (незрячий или другой пользователь) - абонент в открытом или замкнутом пространствах, с носимым абонентским устройством, 2 - ведущий (оператор, диспетчер) находящийся удаленно, 3 - ретранслятор, необходим при отсутствии уверенной связи и для увеличения радиуса действия, 4 - передача видео радиосигнала от абонента к диспетчеру (напрямую или через ретранслятор), 5 - прием и передача радиосигнала с данными между абонентом и диспетчером (напрямую или через ретранслятор), 6 - прием и передача аудио радиосигнала между абонентом и диспетчером (напрямую или через ретранслятор), 7 - кабель для передачи всех видов данных между ретранслятором и диспетчерским пунктом, 8 - видеокамеры фронтального обзора, 9 - видеокамера заднего обзора, 10 - кабель передающий видео, аудио сигналы и электропитание, 11 - наушник и микрофон с костной проводимостью, 12 - приемопередающее устройство с вычислительно-регистрационным блоком, далее ВРБ, 13 - брелок вспомогательного управления абонентским устройством с тревожной кнопкой, 14 - блок определения свойств и расстояния до объектов, препятствий и качества дорожного покрытия, далее БОРОК, 15 - специальный жилет со световозвращающей полосой и ярким знаком с обозначением статуса, 16 - кистевой блок с датчиками определяющие физиологическое состояние абонента, 17 - приемо-передатчик, 18 - монитор (телевизор), 19 - наушники и микрофон диспетчера, 20 - ПК со специализированным программным обеспечением, 21 - устройство ввода (клавиатура и/или мышь), 22 - кабель от ретранслятора, 23 - кабель от приемо-передатчика радио сигнала до ПК или телевизора, 24 - разъем подключения головного модуля, 25 - разъем для подключения дополнительных устройств, 26 - разъем для подключения зарядного устройства или внешнего питания, 27 - разъем для подключения антенны, 28 - клавиша включения и выключения прибора, 29 - клавиша регулирования уровня громкости, 30 - тревожная кнопка, 31 - динамик, 32 - крышка аккумулятора и SIM карты, 33 - фурнитура для крепления ВРБ при ношении, 34 - приемопередающий радио модуль, 35 - вычислительный модуль: процессор, оперативная память, материнская плата, накопитель данных, 36 - аккумулятор, 37 - антенны, 38 - мульти sim-карта, 39 - накопитель данных, 40 - лазер, 41 - линза лазера, 42 - сканируемый объект, 43 - оптика приемника датчика смещения, 44 - датчик смещения: PSD, CMOS и CCD.
Осуществление изобретения
Способ обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах заключается в обеспечении видео сопровождения, голосового сопровождения, позиционирования, определения структуры дорожного покрытия, препятствий, объектов и их свойств и местоположения и размещении на инвалидах или других категорий пользователей носимых абонентских устройств.
С помощью носимых абонентских устройств определяют структуру дорожного покрытия и наличия препятствий, передают цифровые данные о физиологическом состоянии инвалида по радио каналу, передают видеосигнал по радиоканалу. По получении последнего, диспетчер передает на абонентское устройство инвалида, по средствам радио голосовой связи необходимые команды с подробным описанием объектов окружающей среды и препятствий, а также направления движения и взаимодействия с окружающими предметами и объектами.
Новым в изобретении является то, что инвалида оснащают видеокамерами заднего и переднего обозрения и возможностью стерео съемки, обеспечивающие обзор в 360 градусов, блоком определения направления, дальности и свойств препятствий и дорожного покрытия, функционирующем на принципе лазерной триангуляции. При этом, диспетчерский центр оснащают приемником видеосигналов, монитором, приемником-передатчиком аудио-сигнала и цифровых данных.
Когда диспетчер получает видеосигнал от инвалида, информацию о препятствиях и дорожном покрытии, которую отображают на экране монитора, то он корректирует передвижение инвалида по маршруту посредством радио голосовой связи, рассказывая инвалиду о том, что происходит вокруг, описывая словами объекты и препятствия. Помимо этого, диспетчер контролирует психологическое состояния инвалида, путем анализа физиологических показателей.
Для обеспечения бесперебойной радиосвязи максимального радиуса действия между инвалидом и диспетчером применяют радио-ретрансляторы.
При отсутствии от диспетчера голосовых команд, с помощью вычислительно-регистрационного блока передают инвалиду через наушник аудио-сигнал, определяющий штатную работу системы.
В случае отсутствия аудио-сигнала, определяющего штатную работу системы, либо в случае отсутствия голосовых команд от диспетчера, инвалид должен остановиться, фиксируя нештатную ситуацию.
Способ реализуется с помощью системы обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах, которая содержит стационарные радио ретрансляторы, пульт управления диспетчеров, и носимые абонентские устройства. При этом каждый из пультов диспетчеров включает приемник видеосигнала, радиоантенну, телевизор, монитор, блок формирования, обработки и хранения данных, приемник-передатчик аудио и цифрового сигнала, наушник, микрофон, комплект программного обеспечения, включающий цифровую навигационную карту и регистратор. А каждое носимое абонентское устройство включает средства тактильного воздействия, радиоантенну, камеры заднего и переднего обозрения с широким градусом виденья и возможностью стерео съемки, беспроводные с костной проводимостью наушники и микрофон (допустимы классические проводные наушники и микрофон), аналоговый и цифровой приемопередатчик, вычислительно-регистрационный блок, брелок или кистевой модуль с функцией бесконтактной оплаты, блок определения направления, дальности и свойств препятствий, а также структуры дорожного покрытия, датчики состояния физиологического состояния и специальный яркий знак на верхней одежде с обозначением статуса.
Принцип сопровождения незрячего инвалида заключается в следующем.
Ведомый 1 (незрячий или другой пользователь) абонент перемещается в открытом или замкнутом пространствах, с носимым абонентским устройством. При этом, ведущий 2 (оператор, диспетчер) находящийся удаленно, через ретранслятор 3 или системы ретрансляторов, необходимых при отсутствии уверенной связи и для увеличения радиуса действия, осуществляет прием/передачу видео радиосигнала 4 от абонента 1 к диспетчеру 2 (напрямую через кабель 7 или через ретранслятор 3), а также прием и передачу радиосигнала 5 с данными между абонентом 1 и диспетчером 2 (напрямую через кабель 7 или через ретранслятор), и прием и передачу аудио радиосигнала 6 между абонентом 1 и диспетчером 2 (напрямую через кабель 7 или через ретранслятор).
Комплектация системы носимого абонентского устройства для эксплуатации слепым человеком или другой категорией пользователей, состоит из (см. Фиг. 2): видеокамер заднего 9 и переднего 8 обозрения и возможностью стерео съемки обеспечивающие обзор в 360 градусов, беспроводные с костной проводимостью наушники и микрофон 11 (допустимы проводные наушники и микрофон), ВРБ 12, блок определения направления, дальности и свойств препятствий и дорожного покрытия основанном на принципе лазерной триангуляции 14, брелок с тревожной кнопкой 13, кистевой блок 16 с датчиками определения физиологического состояния абонента определяющий пульс и артериальное давление, специальный жилет 15 со световозвращающей полосой и ярким знаком с обозначением статуса.
Система диспетчерского центра (см. Фиг. 3), содержит: приемник видеосигнала и приемник-передатчик аудио сигнала и цифровых данных, находящиеся в приемо-передатчике 17, телевизор (монитор или ПК) 18, наушники и микрофон диспетчера 19, комплект программного обеспечения, включающего цифровую навигационную карту и регистратор, которые установлены на ПК 20, устройство ввода (клавиатура и/или мышь) 21. К приемопередатчику 17 подключен кабель 22 от ретранслятора и кабель 23 для передачи радиосигнала до ПК или телевизора.
Диспетчер 2, в свою очередь получающий видеосигнал от незрячего (абонента) 1, информацию о препятствиях и дорожном покрытии, корректирует передвижение слепого по маршруту, рассказывает, что происходит вокруг, описывает объекты и препятствия, контролирует психологическое состояния абонента, путем анализа физиологических показателей.
Сущностью изобретения является возможность самостоятельно безопасно передвигаться слепому человеку, как в городских условиях, так и помещениях, например в магазине. Для полноценной эксплуатации изобретения без ограничений, потребуется ведущий - диспетчер, находящийся удаленно (например, в диспетчерском центре, дома и пр.). Это может быть, как здоровый человек, так и инвалид с проблемами опорно-двигательной системы, тем самым решая вопрос социализации обоих категорий пользователей. При ухудшении качества передачи сигнала, используется сеть ретрансляторов. Инвалиду по зрению предоставляется возможность самостоятельного прохождения маршрута, без сопровождения диспетчера, используя вычислительно-регистрационный блок (далее ВРБ), блок определения свойств и расстояния до объектов и камеры для создания цифрового трехмерного пространства, объекты которого распознаются и классифицируются, после чего передаются незрячему голосовым роботом с указанием расстояния и направления до них, а также указания по дорожному покрытию, поворотах, цветах сигналов светофора и пр.
Суть способа определяющего расстояние и свойства объектов и качества дорожного покрытия заключается в проецировании лазерных лучей перед пользователем. Лазерный луч отражается от дорожного покрытия и/или объектов и искажается, параметры отраженного луча обрабатываются датчиками PSD, CMOS, CCD и передаются по кабелю в ВРБ, в котором программное обеспечение преобразует данные отраженного лазерного луча в геометрические параметры, применяя метод лазерной триангуляции. По набору характеристик полученных параметров, можно с высокой точностью определять расстояние, тип и параметры объекта, а также качество дорожного покрытия перед абонентом.
На пример Фиг. 7 показана картинка того, что видит диспетчер 2 при получении информации с блоков ВРБ 12 и блока 14 от абонента 1. После визуального определения диспетчером параметров качества дорожного покрытия и объектов перед абонентом 1, ВРБ передает их в цифровом кодированном виде на диспетчерский пульт, для последующей визуализации на экране диспетчера.
На Фиг. 7 можно видеть, что изображены распознанные объекты и дальность до них в метрах (м) или в шагах, а также азимутальное направление по ходу движения с часовым ориентиром. Из примера на Фиг. 7 видно то, что диспетчер 2 может сообщить абоненту 1:
A) в 3 метрах на 10-11 часов находится автомобиль;
Б) в 2 метрах на 11 часов находится лужа;
B) в 2 метрах на 2 часа находится канализационный люк;
Г) в 4 метрах на 2 часа за бордюром находится фонарный столб;
Д) в 23 метрах по ходу движения (ориентир на 12 часов) находится мусорный бак;
Е) в 60 метрах на 1 час по ходу движения находится автомобиль;
Ж) в 90 метрах по ходу движения (ориентир на 12 часов) находится искомая цель конечного маршрута - здание X.
При отсутствии связи с диспетчером, ВРБ самостоятельно передает в наушник абоненту голосовую информацию о качестве покрытия с описанием и дальностью до препятствий и с указанием изменения направления для их преодоления. Информация о качестве дорожного покрытия обновляется при его изменении, информация о препятствиях обновляется не реже 1 раза в секунду.
Для примера, согласно картине состояния объектов на Фиг. 7, если нет связи с диспетчером 2, система ВРБ дает абоненту 1 такую информацию:
A) препятствие объемное в 3 метрах на 10-11 часов;
Б) препятствие наземное в 2 метрах на 11 часов;
B) препятствие вертикальное в 4 метрах на 2 часа;
Г) препятствие наземное в 2 метрах на 2 часа;
Д) препятствие объемное в 23 метрах по ходу движения;
Е) препятствие объемное в 60 метрах на 1 час;
Ж) искомая цель в 90 метрах по ходу движения.
Таким образом, инвалиду по зрению предоставляется возможность самостоятельного прохождения маршрута в пределах работы системы покрытия связи, без сопровождения диспетчера, используя ВРБ 12, блок 14 и камеры 8, 9 для создания цифрового трехмерного пространства, объекты которого распознаются и классифицируются, после чего передаются незрячему голосовым роботом с указанием расстояния и направления до них, а также указания по дорожному покрытию, поворотах, цветах сигналов светофора и пр. Возможность самостоятельно передвигаться обеспечена как в городских условиях, так и помещениях, например в магазине.
Изобретение при этом не требует использования радиоинформаторов или радиомаяков.
Изобретение включает в себя оригинальную методику обучения и тренинга, а также комплекс оптимальных и понятных голосовых команд, емких по определению окружающей среды.
При необходимости в качестве диспетчера используют автоматизированного голосового робота, который зачитывает сведения о препятствиях и дорожном покрытии в виде названий объектов, направлении и расстояниях до них, которые предварительно автоматически распознаются с видеоизображения и трансформируются в цифровые объекты определенной формы и находящиеся на определенной дистанции от инвалида.
При этом, также допустимо, что расстояние и свойства объектов, а также качество дорожного покрытия определяют посредством проецирования лазерных лучей перед пользователем; отражающийся от дорожного покрытия и/или объектов лазерный луч искажается, а параметры отраженного луча обрабатываются датчиками PSD, CMOS, CCD и передаются по кабелю в вычислительно-регистрационный блок, в котором с помощью программного обеспечения преобразуют данные отраженного лазерного луча в геометрические параметры, применяя метод лазерной триангуляции, после чего классифицируется по типу объекта и озвучивается роботом.
Возможен вариант, что после определения параметров качества дорожного покрытия и объектов перед инвалидом, с помощью вычислительно-регистрационного блока передают их в цифровом кодированном виде на диспетчерский пульт, для последующей визуализации на экране диспетчера или автоматического распознавания видеоизображения.
При нештатной ситуации, сигнал с видеокамер 8 и 9 передается напрямую диспетчеру, через радио модуль минуя вычислительно-регистрационный блок 12.
Допустимо, что в случаях потери аудио или видеосигнала между диспетчером и инвалидом, диспетчер 2 вызывает инвалида 1 по резервному каналу мобильной связи, используя доступные сети сотовых операторов. Установив контакт по резервному каналу мобильной связи, диспетчер немедленно останавливает инвалида, отдав советующую голосовую команду. Убедившись в безопасности инвалида, диспетчер запускает на своем компьютере автоматическую программу диагностики неисправностей.
При завершении выполнения автоматической программы диагностики неисправностей, генерируется отчет с указанием необходимых мероприятий по их устранению, в соответствии с инструкцией, диспетчер 2 приступает к выполнению указанных в отчете действий. При невозможности исправить проблему в течение 10-15 минут, диспетчер 2 возвращает инвалида 1 домой, используя резервные каналы связи, для чего диспетчер передает на смартфон инвалида, через специализированное программное обеспечение команду на включение фронтальной цифровой камеры инвалида по каналу bluetooth, изображение передается диспетчеру через смартфон по доступным сетям мобильной связи, для удаленного сопровождения инвалида на маршруте.
В случае отказа цифровой фронтальной камеры 8 инвалида, задействуют телефон с камерой, спутниковым приемником и программным обеспечением, позволяющим удаленно контролировать маршрут инвалида 1, используя технические возможности только телефона.
В том в случае, когда отсутствует техническая возможность удаленно сопровождать инвалида, диспетчер 2 связывается с ближайшим волонтером данного района для оказания помощи; в случае невозможности получения помощи от волонтеров, вызывается экстренная служба (МЧС, МВД).
При отсутствии любых сигналах с инвалидом 1, диспетчер 2 вызывает экстренные службы по последним известным координатам.
А при нападении на инвалида третьих лиц, животных, резкого ухудшения самочувствия, иных экстренных ситуаций угрожающих жизни и здоровью, инвалид 1 нажимает на тревожную кнопку 13, расположенную на брелоке или кистевом модуле для активации тревожного сигнала.
Тревожный сигнал передается на вычислительно-регистрационного блок 12 по радиоканалу, а от с помощью вычислительно-регистрационного блока 12 до диспетчера 2 по цифровому радиоканалу.
Получив тревожный сигнал, диспетчер 2 вызывает экстренные службы по последним известным координатам инвалида 1 и далее действует согласно инструкции.
Технически способ и система заявленного изобретения может быть реализованы следующим образом.
Вычислительный радио блок 12 (см. Фиг. 5) имеет корпус, который состоит, например, из комбинированного материала: металл, пластик, резина. Металлическая часть корпуса ВРБ выполняет функции теплообменника. На корпусе размещаются разъемы подключения головного модуля 24 (видеокамеры и проводного наушник с микрофоном), разъем 25 для подключения дополнительных устройств (например, блока 14), разъем для подключения зарядного устройства 26 или внешнего питания, разъем 27 для подключения антенны, клавиша 28 включения и выключения прибора, клавиша 29 регулировки уровня громкости, тревожная кнопка 30, крышка аккумулятора и SIM карты, динамик 31, фурнитура 33 для крепления ВРБ при ношении. При необходимости, ВРБ может комплектоваться крышкой 32 аккумулятора и SIM карты.
Предлагаемая блок-схема вычислительного радио блока (см. Фиг. 5), содержит приемопередающий радио модуль 34; вычислительный модуль 35, состоящий из: процессора, оперативной памяти, материнской платы, накопителя данных; аккумулятор 36; антенны 37, мульти sim-карту 38, накопитель данных 39.
Головной модуль состоит из видеокамер переднего 8 и заднего 9 обзора, крепление камер с регулировкой угла наклона, беспроводная гарнитура наушника и микрофона с костной проводимостью 11, усиленный экранированный кабель-канал 10 для подключения к ВРБ, фурнитура крепления на голову, разъем для подключения проводной гарнитуры наушника и микрофона.
Блок 14 определения свойств и расстояния до объектов, препятствий и качества дорожного покрытия (см. Фиг. 6) состоит из блока лазерного излучения (лазера 40 и линзы 41), датчиков 44 определения лазерного луча и его свойств, по типу PSD, CMOS, CCD, кабеля для подключения к разъему 25 дополнительного устройства ВРБ 12, фурнитуры крепления для ношения.
В фокусе оптики 43 приемника блока 14 есть три типа датчика смещения 44: PSD, CMOS и CCD.
PSD - Position Sensitive Devector, это фотодиод со светочувствительным элементом в форме полоски. Коэффициент двух выходных токов указывает на положение луча на поверхности диода.
CMOS - Complementary Metal Oxide Semiconductor, это высокоинтегрированный полупроводниковый компонент, состоящий из несколько "светособирающих" пикселей и схемы обработки данных. Положение тестируемого объекта определяется на основе распределения яркости света. Для CMOS обеспечивается:
- очень высокое разрешение и точность при работе с любыми материалами (матовыми, блестящими, светлыми и темными поверхностями);
- высокая надежность измерений даже при сильной контрастности (отсутствие "размытых" областей по сравнению с CCD технологией);
- высокая скорость измерений;
- позволяет создавать сравнительно портативные корпуса датчиков.
CCD - Charge-Coupled Device, это полупроводниковый элемент из собранных в линию фотодиодов. Последовательное считывание данных о яркости позволяет определить местоположение светового луча.
CCD позволяет иметь:
- очень высокое разрешение и точность при работе с любыми материалами (матовыми, блестящими, светлыми и темными поверхностями);
- относительно высокую скорость измерений;
- фотореалистическое сканирование света.
CCD технология идеально для цифровой фотографии.
Для измерения расстояния в блоке 14 оптические датчики направляют световой пучок и принимают информацию об удаленности предмета.
В качестве блока 14 могут использоваться, например, датчики серии SICK OD, OD HI, OD MAX, OD Value, Profiler, DT2, DT10 [см.: http://www.sensorica.ru/docs/art4.shtml]
Подобные датчики расстояния мгновенно фиксируют самые минимальные отклонения, извилины или неровности. В конструкции датчиков расстояния использован триангуляционный метод измерения (в оптических датчиках на большие расстояния используется метод измерения скорости возврата луча). Световой пучок направляется на поверхность тестируемого объекта (источником света может быть, например, лазерный диод). В корпусе датчика установлена оптика приемника 43, которая принимает отраженные лучи на светочувствительном элементе.
В зависимости от положения отраженного луча и известной геометрии определяется расстояние до тестируемого объекта 42 (см. Фиг. 6). При приближении объекта 42 к оптическому приемнику 43, отраженный луч от лазера 40, пройдя через линзу 41, попадает на оптику приемника 43 и далее на датчики смещения 44: PSD, CMOS и CCD. Поскольку лазер 40 располагается на некотором удалении от датчиков смещения 44: PSD, CMOS и CCD и оптики приемника 43, причем это расстояние всегда одинаковое и известно, то в зависимости от изменения расстояния до объекта 42, отраженный луч от лазера 40 приходит в разные точки датчика смещения 44: PSD, CMOS и CCD. Методом триангуляции по известному расстоянию (базису) между точкой активного отраженного луча лазера на датчиках смещения 44: PSD, CMOS и CCD и точкой излучения лазера 40, а также зная углы исходящего луча и отраженного при базисе, легко вычисляют расстояние до объекта 42 за доли секунды.
Устройство определения артериального давления и пульса, а также с функцией бесконтактной оплаты и идентификации осуществляет связь с ВРБ по каналу Bluetouth. Носится на кисте руки и представляет собой кистевой блок 16 с датчиками определяющие физиологическое состояние абонента.
Обзорные видеокамеры 8 и 9 (Фиг. 2) абонента, передают по проводам видеосигнал на абонентское приемопередающее устройство с вычислительно-регистрационным блоком 12. Радио модуль ВРБ 12 включает в себя радио приемник/передатчик и контроллер, сканирует диапазон частот, передавая на каждом радиоканале контрольный радиосигнал, базовая станция получает, оценивает и передает на ВРБ ответный сигнал с оценкой качества контрольного сигнала, при получении ответного радиосигнала от базовой станции, радио модуль ВРБ определяет доступность частот и их качество, после чего передает видеосигнал на наиболее качественном радиоканале. При ухудшении качества получаемого видеосигнала базовая станция запрашивает у ВРБ повторный цикл определения наиболее качественного радиоканала. С определенной периодичностью (1 раз в 5/30/60/300 секунд) ВРБ самостоятельно сканирует диапазон частот, в зависимости от текущей ситуации и выбирает наиболее качественный радиоканал. Качество радиосигнала определяется по расчету отношения сигнал/шум по формуле:
С/Ш=Uc-Uш - 10⋅lg(Вк/Визм)-Кп, где
С/Ш - отношение сигнал/шум [дБ],
Uc - уровень радиосигнала изображения для канала с аналоговой модуляцией или фактический уровень мощности для канала с цифровой модуляцией [дБмкВ],
Uш - уровень шума на частоте с наименьшим содержанием составляющих полезного сигнала [дБмкВ],
Вк - ширина полосы частот канала изображения или ширина цифрового канала [МГц],
Визм - ширина полосы частот измерительного фильтра [МГц],
Кп - поправочный коэффициент учитывающий коэффициент прямоугольности измерительного фильтра, а также разницу показаний измерителя в разных режимах измерения: квазипиковые значения и средние значения.
Радио модуль ВРБ 12 передает видеосигнал (см. Фиг. 1) по радиоканалу 4 и 5 в аналоговом и/или цифровом виде: аналоговый сигнал в диапазоне 50 Мгц - 2,4 ГГц, цифровой от 1 Гц до 40 Гц, допускается передача видеосигнала через мобильные сети, автоматически определив оператора с наилучшим качеством связи, используя мульти sim-карту.
Видеосигнал каждой отдельной мини камеры передается на своей индивидуальной частоте. Цифровая передача видеосигналов с видеокамер, может осуществляться на единой частоте. Прием сигнала осуществляется диспетчером напрямую при наличии хорошего качества сигнала, либо с помощью ретранслятора. Допускается, в резервной ситуации или в случае наличия лучшего качества сигнала, прием диспетчером цифрового видеосигнала через интернет канал, по кабелю от ретранслятора либо через мобильные сети. Данные от датчиков физиологического состояния абонента с блока 16, а также данные с блока 14 предаются цифровым методом.
Диспетчер получает видеосигнал через приемопередатчик 17 по беспроводной связи или по кабелю 22, после чего передается по проводам 23 на телевизор и/или ПК 18. На экране ПК 18 или телевизора отображается изображение 45 с фронтальной камеры 8 абонента 1, изображение 46 с камеры 9 заднего обзора, накладывается, например, в правом верхнем углу экрана ПК 18 у диспетчера 2 (см. Фиг. 8).
Дополнительно на экране накладывается текстовая информация от датчиков абонента 48 и иная информационная графика (см. Фиг. 8). Например, на экране диспетчера отображается: качество связи аудио 49 и видеосигнала 50, качество сотовой связи 51, уровень заряда аккумулятора 47, информация от блока определения свойств и расстояния до объектов, препятствий и качества дорожного покрытия, которая выводится прямо на изображение с фронтальной камеры 45. Видеосигнал в цифровом формате передается на ПК 20 по кабелю 22 от ретранслятора, видеосигнал обрабатывается программным обеспечением и выводится на монитор со следующим функционалом:
- Изображение на полном экране с необходимой видеокамеры абонента.
- Разделение экрана ПК по сегментам с изображением в каждом из них индивидуального сигнала видеокамер абонента.
- Увеличение масштаба области экрана, яркости, контрастности, наклона.
- Синтезированное трехмерное изображение абонента с окружающей его средой.
- Навигационная цифровая карта, с маршрутом абонента и его текущей позицией.
- На экране накладывается текстовая информация от датчиков абонента и информационная графика: качество связи, уровень заряда аккумулятора, информация от БОРОК, информация от физиологических датчиков.
- По запросу диспетчера, на экран выводятся личные данные абонента, список маршрутов, комплектация абонентского устройства.
- Видео и аудио сигналы и данные абонента, информация по прохождению маршрута регистрируется (запоминается) на жестком диске ПК для архивации.
Диспетчер 2, проанализировав видео информацию на экране телевизора и/или ПК, полученную от устройства абонента, начинает сопровождение абонента 1, передавая ему голосовые команды через микрофон 19, подключенный к радио приемопередатчику, установленному в приемопередатчике 17. Аудио сигнал поступает на приемопередатчик абонента (ВРБ) 12 по радио каналу и предается на наушники с костной проводимостью 11. Абонент может подтверждать или уточнять команды диспетчера голосом, передовая через микрофон с костной проводимостью 11 и ВРБ 12 аудио радиосигнал в обратной последовательности на наушники диспетчера 19. Передача аудио сигнала между абонентом 1 и диспетчером 2 осуществляется аналогично передаче видеосигналу. Диспетчер, применяя ПО, может посылать цифровые команды на ВРБ 12, например, для принудительной трансляции видеосигнала в аналоговом режиме, смену частоты в ручном режиме, перезагрузка абонентского устройства, включение/выключение и т.п.
Нештатные ситуации.
При отсутствии от диспетчера голосовых команд, ВРБ передает абоненту через наушник с частотой 0,2 Гц (1 раз в 5 секунд) аудиосигнал определяющий штатную работу системы. В случае отсутствия аудиосигнала определяющего штатную работу системы, либо в случае отсутствия голосовых команд от диспетчера, абоненту, в соответствии с инструкцией, немедленно остановиться.
При нештатной ситуации, сигнал с видеокамер передается напрямую диспетчеру, через радио модуль ВРБ, таким образом, исключая потерю видеосигнала при выходе из строя вычислительного модуля ВРБ.
В случаях потери аудио или видеосигнала между диспетчером и абонентом, предлагается следующий алгоритм действий:
1. При отсутствии аудио связи, диспетчер вызывает абонента по резервному каналу мобильной связи, используя доступные сети сотовых операторов.
2. Установив контакт по резервному каналу мобильной связи, диспетчер немедленно останавливает абонента, отдав советующую голосовую команду.
3. Убедившись в безопасности абонента, диспетчер запускает на ПК автоматическую программу диагностики неисправностей.
4. При завершении выполнения автоматической программы диагностики неисправностей, генерируется отчет с указанием необходимых мероприятий по их устранению, в соответствии с инструкцией, диспетчер приступает к выполнению указанных в отчете действий.
5. При невозможности исправить проблему в течение 10-15 минут, диспетчер возвращает абонента домой, используя резервные каналы:
a. Диспетчер передает на смартфон абонента, через специализированное программное обеспечение команду на включение фронтальной цифровой камеры абонента по каналу bluetooth, изображение передается диспетчеру через смартфон по доступным сетям мобильной связи, для удаленного сопровождения абонента на маршруте.
b. В случае отказа цифровой фронтальной камеры абонента, может быть задействован телефон с камерой, GPS приемником и программным обеспечением, позволяющим удаленно контролировать маршрут абонента, используя технические возможности только телефона.
c. В случае, отсутствия технической возможности удаленно сопровождать абонента, диспетчер связывается с ближайшим волонтером данного района для оказания помощи. В случае невозможности получения помощи от волонтеров, вызывается экстренная служба (МЧС, МВД).
6. При отсутствии любых сигналах с абонентом, диспетчер вызывает экстренные службы по последним известным координатам.
При нападении на абонента третьих лиц, животных, резкого ухудшения самочувствия, иных экстренных ситуаций угрожающих жизни и здоровью, абонент нажимает на тревожную кнопку, расположенную на брелоке или кистевом модуле для активации тревожного сигнала. Тревожный сигнал, идет на ВРБ по радиоканалу, а от ВРБ до диспетчера по цифровому радиоканалу. Получив тревожный сигнал, диспетчер вызывает экстренные службы по последним известным координатам абонента и далее действует по инструкции.
Изобретение относится к средствам безопасного передвижения в замкнутом и открытом пространствах инвалидов по зрению. Способ состоит из обеспечения видеосопровождения, голосового сопровождения, позиционирования, определения структуры дорожного покрытия, препятствий, объектов и их свойств и местоположения и размещении на инвалидах носимых абонентских устройств, определяющих структуру дорожного покрытия и наличия препятствий, передающих цифровые данные о физиологическом состоянии инвалида по радиоканалу, передающих видеосигнал по радиоканалу. По получении сигнала диспетчер передает на абонентское устройство инвалида посредством радио голосовой связи необходимые команды с подробным описанием объектов окружающей среды и препятствий, а также направления движения и взаимодействия с окружающими предметами и объектами. Инвалида оснащают видеокамерами заднего и переднего обозрения и возможностью стереосъемки, обеспечивающими обзор в 360 градусов, блоком определения направления, дальности и свойств препятствий и дорожного покрытия, функционирующим на принципе лазерной триангуляции, а диспетчерский центр оснащают приемником видеосигналов, монитором, приемником-передатчиком аудиосигнала и цифровых данных, где диспетчер, получающий видеосигнал от инвалида, информацию о препятствиях и дорожном покрытии, которую отображают на экране монитора, корректирует передвижение инвалида по маршруту посредством радио голосовой связи, рассказывая инвалиду о том, что происходит вокруг, описывая словами объекты и препятствия, контролируя психологическое состояние инвалида путем анализа физиологических показателей. Для обеспечения бесперебойной радиосвязи максимального радиуса действия между инвалидом и диспетчером применяют радиоретрансляторы. При отсутствии от диспетчера голосовых команд с помощью вычислительно-регистрационного блока передают инвалиду через наушник аудиосигнал, определяющий штатную работу системы; в случае отсутствия аудиосигнала, определяющего штатную работу системы, либо в случае отсутствия голосовых команд от диспетчера инвалид должен остановиться, фиксируя нештатную ситуацию. Применение данного изобретения позволит улучшить возможность самостоятельного передвижения слепого человека. 2 н. и 6 з.п. ф-лы, 8 ил.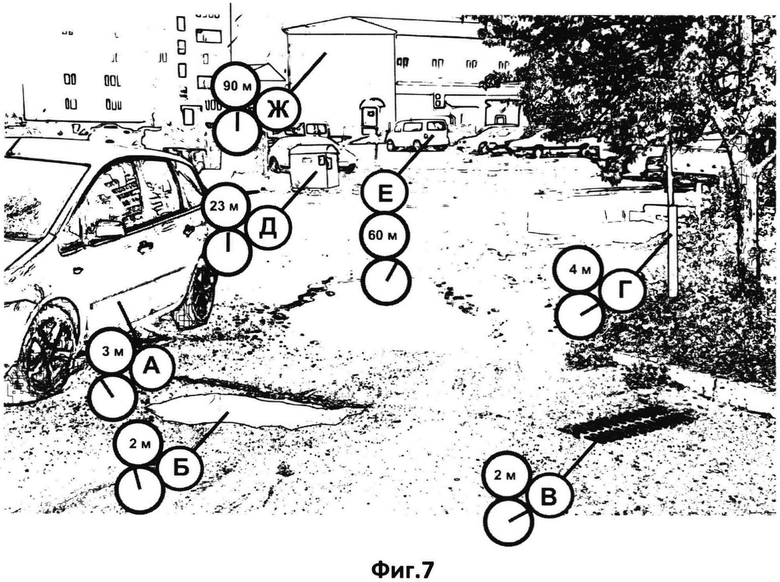
1. Способ обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах, состоящий из обеспечения видеосопровождения, голосового сопровождения, позиционирования, определения структуры дорожного покрытия, препятствий, объектов и их свойств и местоположения и размещении на инвалидах носимых абонентских устройств, определяющих структуру дорожного покрытия и наличия препятствий, передающих цифровые данные о физиологическом состоянии инвалида по радиоканалу, передающих видеосигнал по радиоканалу, по получении которого диспетчер передает на абонентское устройство инвалида посредством радио голосовой связи необходимые команды с подробным описанием объектов окружающей среды и препятствий, а также направления движения и взаимодействия с окружающими предметами и объектами, отличающийся тем, что инвалида оснащают видеокамерами заднего и переднего обозрения и возможностью стереосъемки, обеспечивающими обзор в 360 градусов, блоком определения направления, дальности и свойств препятствий и дорожного покрытия, функционирующим на принципе лазерной триангуляции, а диспетчерский центр оснащают приемником видеосигналов, монитором, приемником-передатчиком аудиосигнала и цифровых данных, где диспетчер, получающий видеосигнал от инвалида, информацию о препятствиях и дорожном покрытии, которую отображают на экране монитора, корректирует передвижение инвалида по маршруту посредством радио голосовой связи, рассказывая инвалиду о том, что происходит вокруг, описывая словами объекты и препятствия, контролируя психологическое состояние инвалида путем анализа физиологических показателей; при этом для обеспечения бесперебойной радиосвязи максимального радиуса действия между инвалидом и диспетчером применяют радиоретрансляторы; при отсутствии от диспетчера голосовых команд с помощью вычислительно-регистрационного блока передают инвалиду через наушник аудиосигнал, определяющий штатную работу системы; в случае отсутствия аудиосигнала, определяющего штатную работу системы, либо в случае отсутствия голосовых команд от диспетчера инвалид должен остановиться, фиксируя нештатную ситуацию.
2. Способ по п. 1, отличающийся тем, что в качестве диспетчера используют автоматизированного голосового робота, который зачитывает сведения о препятствиях и дорожном покрытии в виде названий объектов, направлении и расстояниях до них, которые предварительно автоматически распознаются с видеоизображения и трансформируются в цифровые объекты определенной формы и находящиеся на определенной дистанции от инвалида.
3. Способ по п. 1 или 2, отличающийся тем, что расстояние и свойства объектов, а также качество дорожного покрытия определяют посредством проецирования лазерных лучей перед пользователем; отражающийся от дорожного покрытия и/или объектов лазерный луч искажается, а параметры отраженного луча обрабатываются датчиками PSD, CMOS, CCD и передаются по кабелю в вычислительно-регистрационный блок, выполненный с возможностью преобразования данных отраженного лазерного луча в геометрические параметры, после чего классифицируется по типу объекта и озвучивается роботом.
4. Способ по п. 3, отличающийся тем, что после определения параметров качества дорожного покрытия и объектов перед инвалидом с помощью вычислительно-регистрационного блока передают их в цифровом кодированном виде на диспетчерский пульт, для последующей визуализации на экране диспетчера или автоматического распознавания видеоизображения.
5. Способ по п. 1, отличающийся тем, что при нештатной ситуации сигнал с видеокамер передается напрямую диспетчеру, через радиоретранслятор минуя вычислительно-регистрационный блок.
6. Способ по п. 1, отличающийся тем, что в случаях потери аудио- или видеосигнала между диспетчером и инвалидом диспетчер вызывает инвалида по резервному каналу мобильной связи, используя доступные сети сотовых операторов; установив контакт по резервному каналу мобильной связи, диспетчер немедленно останавливает инвалида, отдав советующую голосовую команду; убедившись в безопасности инвалида, посредством компьютера, выполненного с возможностью автоматической диагностики неисправностей; при завершении выполнения автоматической диагностики неисправностей генерируется отчет с указанием необходимых мероприятий по их устранению, в соответствии с инструкцией, диспетчер приступает к выполнению указанных в отчете действий; при невозможности исправить проблему в течение 10-15 минут, диспетчер возвращает инвалида домой, используя резервные каналы связи, для чего диспетчер передает на смартфон инвалида команду на включение фронтальной цифровой камеры инвалида по каналу bluetooth, изображение передается диспетчеру через смартфон по доступным сетям мобильной связи, для удаленного сопровождения инвалида на маршруте; в случае отказа цифровой фронтальной камеры инвалида задействуют телефон с камерой, спутниковым приемником, выполненным с возможностью удаленно контролировать маршрут инвалида, используя технические возможности только телефона; в случае отсутствия технической возможности удаленно сопровождать инвалида, диспетчер связывается с ближайшим волонтером данного района для оказания помощи; в случае невозможности получения помощи от волонтеров вызывается экстренная служба (МЧС, МВД); а при отсутствии любых сигналов с инвалидом диспетчер вызывает экстренные службы по последним известным координатам.
7. Способ по п. 1, отличающийся тем, что при нападении на инвалида третьих лиц, животных, резком ухудшении самочувствия, иных экстренных ситуаций, угрожающих жизни и здоровью, инвалид нажимает на тревожную кнопку, расположенную на брелке или кистевом модуле для активации тревожного сигнала; тревожный сигнал передается на вычислительно-регистрационный блок по радиоканалу, а от вычислительно-регистрационного блока до диспетчера по цифровому радиоканалу; получив тревожный сигнал, диспетчер вызывает экстренные службы по последним известным координатам инвалида и далее действует согласно инструкции.
8. Система обеспечения ориентирования инвалидов по зрению в замкнутом и открытом пространствах, функционирующая согласно способу по п. 1, содержащая стационарные радиоретрансляторы, пульт управления диспетчеров и носимые абонентские устройства, при этом каждый из пультов диспетчеров включает приемник видеосигнала, радиоантенну, монитор, блок формирования, обработки и хранения данных, приемник-передатчик аудио и цифрового сигнала, наушник, микрофон, компьютер с цифровой навигационной картой и регистратор, а каждое носимое абонентское устройство включает радиоантенну, видеокамеры заднего и переднего обозрения и возможностью стереосъемки, обеспечивающие обзор в 360 градусов, беспроводные с костной проводимостью наушники и микрофон или проводные наушники и микрофон, аналоговый и цифровой приемопередатчик, вычислительно-регистрационный блок, брелок управления абонентским устройством с тревожной кнопкой и кистевой блок с датчиками физиологических показателей и с функцией бесконтактной оплаты, определяющими физиологическое состояние абонента, блок определения направления, дальности и свойств препятствий, и структуры дорожного покрытия, основанный на принципе лазерной триангуляции, и жилет со световозвращающей полосой и ярким знаком с обозначением статуса.
| МЕХАНИЗМ ПОПЕРЕЧНОЙ УКЛАДКИ ЖГУТА ТКАНИ В АППАРАТАХ ОТДЕЛОЧНОГО ПРОИЗВОДСТВА | 0 |
|
SU167804A1 |
| СПОСОБ ИНФОРМИРОВАНИЯ ИНВАЛИДОВ О НАЛИЧИИ БЛИЗЛЕЖАЩИХ СТАЦИОНАРНЫХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ НЕОБХОДИМОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ К ЭТИМ ОБЪЕКТАМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2582045C2 |
| Регулировочный автотрансформатор | 1949 |
|
SU89221A1 |
| СПОСОБ ОРИЕНТАЦИИ, НАВИГАЦИИ И ИНФОРМАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ С НАРУШЕНИЕМ ЗРИТЕЛЬНЫХ ФУНКЦИЙ И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2503436C1 |

