Область техники
Предлагаемая группа изобретений относится к автоматизированному физиотерапевтическому оборудованию для проведения оздоровительных массажных операций, а конкретно к интеллектуальным стационарным или передвижным робототехническим машинам, оснащенных контактными манипуляторными механизмами с интуитивно настроенными массажными компонентами.
Уровень техники
Из уровня техники известен массажный робот (см. CN109077907, кл. A61H7/00, публ. 2018г. [1]).
Известный массажный робот [1] содержит блок питания, систему управления и массажный элемент, удерживаемый, по меньшей мере, одной рукой-манипулятором, состоящей, по крайней мере, из двух подвижных относительно друг друга адаптивных звеньев.
Основополагающей особенностью рассматриваемого массажного робота является его конструктивное исполнение, в том числе внешнее, в виде человекоподобного объекта, размещенного на подвижном опорном основании.
Как правило, человекоподобный робот [1] перемещается по направляющим, посредством гусеничного движителя, вдоль массажного стола, на котором располагается пациент.
Посредством упомянутого массажного элемента производится непосредственное массажное вмешательство. Массажный элемент представляет из себя портативную физиотерапевтическую насадку, активные элементы которой массируют поверхность кожного покрова.
А посредством упомянутой руки-манипулятора, выполняющей функцию исполнительного органа, обеспечивается контроль проведения физиотерапевтической процедуры, а также соблюдаются параметры и особенности ее проведения, заложенные в имеющейся системе управления, которая комплексно определяет функциональность данного робототехнического средства.
Как было указано выше движение массажного робота [1] производится по расположенной в нижней части робота направляющей с помощью шестеренчатого привода, что может понизить практические показатели при использовании робота, поскольку для надежности и безопасности его эксплуатации необходимо первично подготавливать установочные поверхности, а далее следить за их эксплуатационным состоянием и производить периодическое техническое обслуживание.
Дополнительным недостатком технического решения [1] следует отметить непредусмотренную конструкцией мобильность и универсальность, поэтому в случае переброски робота с одного пункта использования на другой необходимо производить демонтаж оборудования, затем производить его установку и настройку на новом месте для обеспечения корректности работы в новых условиях, а это соответственно потребует привлечение дополнительных средств и трудовых ресурсов.
Из уровня техники известен интеллектуальный массажный робот (см. CN110123623, кл. A61H39/04, публ. 2019г. [2]).
Известное решение [2] относится к области робототехники, а конкретно относится к интеллектуальному реабилитационному массажному роботу.
Известный интеллектуальный массажный робот [2] содержит подвижную базу, систему управления и устройство взаимодействия человека с автоматической машиной.
В составе известного роботизированного средства имеется управляемая компьютерной системой составная массажная рука-манипулятор, имеющая возможность перемещения в нескольких плоскостях, а указанное устройство взаимодействия человека с автоматической системой имеет блок управления, процессор и средство отображения информации.
Следует отметить, что корпус интеллектуального робота установлен на подвижном основании, при этом перемещение осуществляется с помощью адаптивных роликовых механизмов.
Известный массажный робот [2] достаточно функционален и наделен высокими показателями универсальности и практичности, поскольку может быть использован на различных поверхностях, может быть легко и беспрепятственно транспортирован с одного места использования на другое, а при ведении в эксплуатацию настройки и адаптации оборудования не требуется.
Однако у данного устройства [2] есть заметные недостатки, которые следует упомянуть далее.
Применяемая для массажа рука-манипулятор, как было указано выше, имеет возможность перемещения в нескольких плоскостях и обеспечивается это тем, что она состоит из трех подвижно соединенных друг с другом адаптивных звеньев, однако, описанный конструктивный вариант не способен гарантировать безопасность проведения процедуры, поскольку, в процессе массажа при перемещении периферийные части звеньев могут касаться кожных участков пациента, что может привести к возникновению травм.
Еще одним техническим упущением следует считать недоработанные/непродуманные эргономические показатели, которые, в частности, не предполагают соблюдение адаптивного унифицированного подхода к проведению физиотерапевтических операций, а требуют периодического человеческого вмешательства, например, с целью замены массажной насадки или программного изменения параметров и/или режима работы исполнительных частей данного массажного робота.
Наиболее близким аналогом предлагаемой группы изобретений следует считать массажный робот, известный из CN210277652, кл. A61H7/00, публ. 2020 г. [3].
Известное решение применяется в качестве физиотерапевтического средства, настроенного на автоматизированное контролируемое проведение медицинских массажных вмешательств.
Известный массажный робот имеет систему управления и взаимодействующую с ней исполнительную часть. При этом исполнительная часть имеет роботизированный привод-манипулятор, имеющий несколько подвижных составных частей, кроме того, имеется возможность регулировки прилагаемого массажного усилия.
Согласно конструкции массажного робота [3], роботизированный привод-манипулятор установлен посредством промежуточного элемента на опорном подвижном корпусе, а упомянутые составные части привода-манипулятора представляют из себя подвижно соединенные между собой механические рычаги, крайний из которых имеет возможность массажного контакта для чего снабжен адаптивной массажной насадкой.
В соответствии с режимом работы массажного робота [3] пороговые значения массажных усилий устанавливаются посредством блока управления. Регулируются сила и скорость массажа, при этом учитываются заранее исследованные анатомические особенности каждого пациента в отдельности.
Следует отметить, что имеющаяся возможность регулировки прикладываемого массажного усилия не может обеспечивать эффективность и безопасность проведения терапевтической процедуры. Так, например, при массаже возможно проявление непроизвольной/непредвиденной реакции организма, например, рефлексорные реакции, а также спазмы или судороги, нестабильные/неустойчивые отклики, которых могут некорректно отразиться на оказываемом силовом воздействии и быть причиной возможного бездействия или наоборот чрезмерного действия с риском получения травмы.
Дополнительным недостатком следует считать вероятные неточности при позиционной работе привода-манипулятора, обусловленные тем, что установка робота и его подготовка к физиотерапевтическому вмешательству производится преимущественно в ручном режиме при помощи оператора, который периодически корректирует его работу, меняя установочный участок и настройки системы управления, что способно приводить к смещению позиции массажного инструмента и к последующему поиску его заданного пространственного положения для возможности выполнения массажного вмешательства.
Раскрытие изобретения
Технической проблемой предлагаемой группы изобретений является создание, обладающего высокими технико-эксплуатационными характеристиками, физиотерапевтического робота манипуляторного типа, способного производить оздоровительное массажное вмешательство в автоматическом режиме с возможностью адаптивного контроля чувствительности, оказываемого силового воздействия.
Техническим результатом предлагаемой группы изобретений является реализация назначения по созданию указанного чувствительного автоматического массажного комплекса, функционирование которого обеспечивает высокую эффективность и безопасность процедуры путем возможности эксплуатационного контроля и при необходимости ограничения оказываемого силового массажного действия.
Указанный технический результат, решающий заданную техническую проблему, достигается в результате того, что контактный физиотерапевтический комплекс манипуляторного типа содержит контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного вмешательства, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена опорного кронштейна, на нижнем концевом участке которого с возможностью качения установлен рабочий рычаг один из крайних участков которого оснащен упомянутым чувствительным контактным элементом для массажного вмешательства, а другой из участков рабочего рычага посредством связующего модуля с упругим элементом соединен со стыковочным участком опорного кронштейна, при этом расположение указанного чувствительного контактного элемента выбрано так, чтобы во-первых ось качения рабочего рычага была преимущественно параллельна плоскости, образованной участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя, а во вторых, чтобы указанный участок контакта был за пределами плоскости, образованной осью качения рабочего рычага и условным перпендикуляром к плоскости, образованной участком контакта.
Также указанный технический результат, решающий, заданную техническую проблему достигается в результате того, что контактный физиотерапевтический комплекс манипуляторного типа содержит контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного вмешательства, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система выполнена в виде шарнирного, по меньшей мере, шарнирного четырехкомпонентного механизма, верхняя часть, которого выполнена в виде неподвижно закрепленного на свободном концевом участке звена соответственно верхнего блока, а нижняя часть выполнена в виде подвижного соответственно нижнего блока, концевой участок которого снабжен упомянутым чувствительным контактным элементом, при этом указанные верхний и нижний блоки объединены между собой двумя наклоненными перемычками, между которыми расположен связующий модуль с упругим элементом, одна часть которого зафиксирована на верхнем блоке, а другая механически связана с нижним блоком, причем расположение указанного чувствительного контактного элемента выбрано так, что плоскость, образованная участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя преимущественно перпендикулярна касательной к траектории перемещения нижнего блока в средней части диапазона допустимых перемещений.
Кроме того, указанный технический результат, решающий, заданную техническую проблему достигается в результате того, что контактный физиотерапевтический комплекс манипуляторного типа содержит контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного вмешательства, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена опорного кронштейна, содержащего линейную вертикально ориентированную направляющую, на которой с возможностью перемещения установлена каретка, движение которой в верхнюю сторону ограничено связующим модулем с упругим элементом, установленным на соединительной части опорного кронштейна, при этом каретка снабжена удерживающим блоком с установленным на нем упомянутым чувствительным контактным элементом, расположение которого выбрано так, чтобы плоскость, образованная участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя была преимущественно перпендикулярна линейной направляющей.
Предлагаемые выше конструктивные варианты заявленных контактных физиотерапевтических комплексов манипуляторного типа с учетом их характеристик и технических особенностей, образуют совокупности признаков, достаточных для достижения заданного технического результата, заключающегося в реализации назначения по созданию указанного чувствительного автоматического массажного комплекса, функционирование которого обеспечивает высокую эффективность и безопасность процедуры путем возможности эксплуатационного контроля и при необходимости ограничения оказываемого силового массажного действия и собственно для решения актуальной технической проблемы по получению обладающего высокими технико-эксплуатационными характеристиками, физиотерапевтического робота манипуляторного типа, способного производить оздоровительное массажное вмешательство в автоматическом режиме с возможностью адаптивного контроля чувствительности, оказываемого силового воздействия.
Краткое описание чертежей
На фиг. 1 общий вид предлагаемой массажной системы;
На фиг. 2 представлен вариант исполнения массажной системы, согласно первому варианту исполнения (вариант 1), с использованием кронштейна у подвесной системы;
На фиг. 3 представлен вариант исполнения массажной системы, согласно второму варианту исполнения (вариант 2), с использованием шарнирного четырехкомпонентного механизма у подвесной системы;
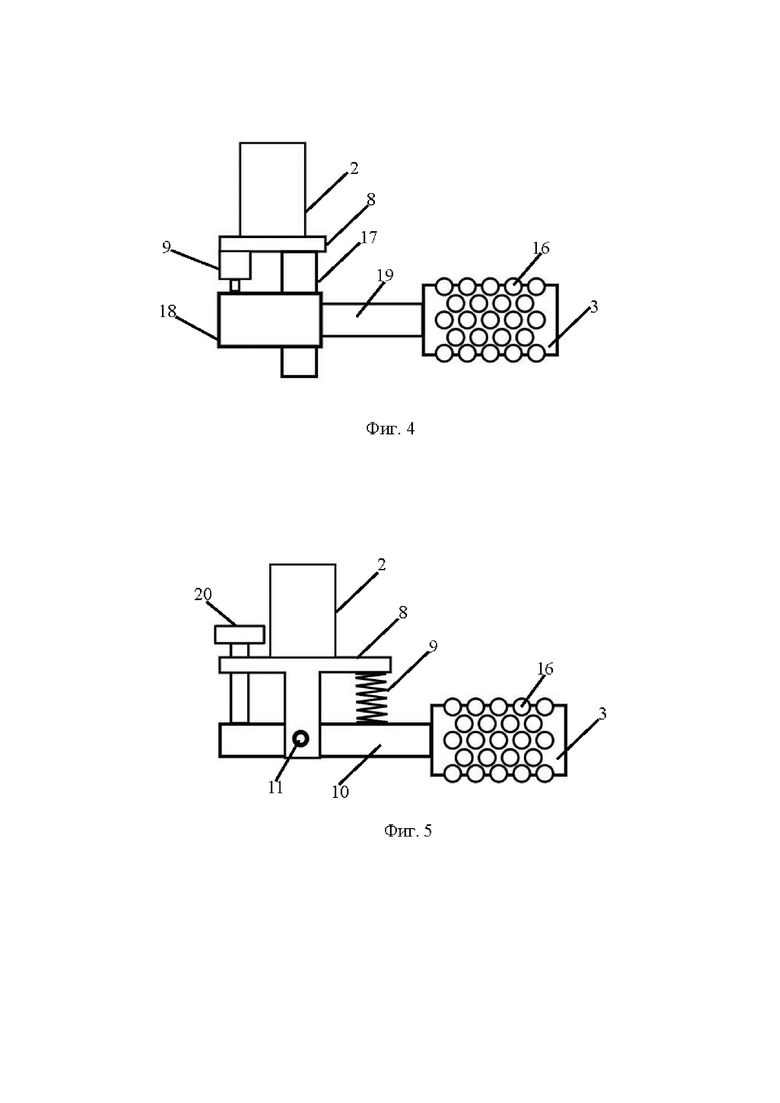
На фиг. 4 представлен вариант исполнения массажной системы, согласно третьему варианту исполнения (вариант 3), с использованием опорного кронштейна с линейной направляющей у подвесной системы;
На фиг. 5 представлен вариант исполнения массажной системы с использованием пружины в качестве элемента упругости подвесной системы;
На фиг. 6 представлен вариант исполнения массажной системы с использованием пневматического цилиндра в качестве элемента упругости подвесной системы;
На фиг. 7 представлен чувствительный контактный элемент для массажного вмешательства в виде компрессионной микровибрации.
Осуществление изобретения
Предлагаемая группа изобретений поясняется конкретными примерами выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанными совокупностями существенных признаков заданного технического результата, а также решение существующей технической проблемы.
На перечисленных фигурах представлены следующие части и элементы предлагаемого контактного физиотерапевтического комплекса манипуляторного типа (варианты):
1 - контрольно-управленческая часть;
2 - манипуляторный привод;
3 - чувствительный контактный элемент для массажного вмешательства;
4 - подвесная демпфирующая система;
5 - звено манипуляторного привода;
6 - несоосные переходы;
7 - колесные средства перемещения;
8 - опорный кронштейн;
9 - связующий модуль с упругим элементом;
10 - рабочий рычаг;
11 - ось вращения;
12 - верхний блок;
13 - шарнирный четырехкомпонентный механизм;
14 - нижний блок;
15 - перемычки;
16 - массажные ролики;
17 - линейная направляющая;
18 - каретка;
19 - удерживающий блок;
20 - винт;
21 - вращающиеся массажные ролики;
22 - ротор;
23 - оси вращения роликов;
24 - исполнительная часть;
25 - панель управления.
И так, согласно первому варианту исполнения контактного физиотерапевтического комплекса манипуляторного типа (см. фиг. 1, фиг. 2) он содержит исполнительную часть 24 и контрольно-управленческую часть 1.
Исполнительная часть 24 включает роботизированный манипуляторный привод 2, подвесную демпфирующую систему 4, а также чувствительный контактный элемент 3 для массажного вмешательства, содержащий массажные ролики 16.
Роботизированный манипуляторный привод 2 выполнен составным из подвижно соединенных между собой звеньев 5 с образованием несоосных переходов 6 в обозначенных местах соединения.
Подвесная демпфирующая система 4 состоит из закрепленного на свободном концевом участка звена 5 опорного кронштейна 8. На нижнем концевом участке опорного кронштейна 8 с возможностью качения установлен рабочий рычаг 10.
Один из крайних участков рабочего рычага 10 оснащен указанным упомянутым чувствительным контактным элементом 3 для массажного вмешательства, а другой из крайних участков посредством связующего модуля с упругим элементом 9 соединен с противоположной частью опорного кронштейна 8.
При этом расположение указанного чувствительного контактного элемента 3 выбрано так, чтобы во-первых ось качения (вращения) 11 рабочего рычага 10 была преимущественно параллельно плоскости, образованной участком контакта поверхности чувствительного контактного элемента 3 с поверхностью тела пользователя, а во-вторых, чтобы указанный участок контакта был за пределами плоскости, образованной осью качения 11 рабочего рычага 10 и условным перпендикуляром к плоскости, образованной участком контакта.
Согласно второму варианту исполнения контактного физиотерапевтического комплекса манипуляторного типа (см. фиг. 1, фиг. 3) он содержит исполнительную часть 24 и контрольно-управленческую часть 1.
Исполнительная часть 24 включает роботизированный манипуляторный привод 2, подвесную демпфирующую систему 4, а также чувствительный контактный элемент 3 для массажного вмешательства, содержащий массажные ролики 16.
Роботизированный манипуляторный привод 2 выполнен составным из подвижно соединенных между собой звеньев 5 с образованием несоосных переходов 6 в обозначенных местах соединения.
Подвесная демпфирующая система выполнена в виде шарнирного, по меньшей мере, шарнирного четырехкомпонентного механизма 13. Верхняя часть данного механизма выполнена в виде неподвижно закрепленного на свободном концевом участке звена 5 соответственно верхнего блока 12, а нижняя его часть выполнена в виде подвижного соответственно нижнего блока 14.
Концевой участок нижнего блока 14 снабжен упомянутым чувствительным контактным элементом 3.
Указанные верхний 12 и нижний 14 блоки имеют приблизительно одинаковую длину и объединены между собой двумя наклоненными перемычками 15 приблизительно одинаковой длины. Между указанными перемычками 15 расположен связующий модуль с упругим элементом 9, при этом одной верхней стороной упомянутый модуль 19 зафиксирован на верхнем блоке 12, а одной нижней стороной упомянутый модуль 19 зафиксирован на нижнем блоке 14.
Расположение указанного чувствительного контактного элемента 3 для массажного вмешательства выбрано так, что плоскость, образованная участком контакта поверхности чувствительного контактного элемента 3 с поверхностью тела пользователя преимущественно перпендикулярна касательной к траектории перемещения нижнего блока 14 в средней части диапазона допустимых перемещений.
Согласно третьему варианту исполнения контактного физиотерапевтического комплекса манипуляторного типа (см. фиг. 1, фиг. 4) он содержит исполнительную часть 24 и контрольно-управленческую часть 1.
Исполнительная часть 24 включает роботизированный манипуляторный привод 2, подвесную демпфирующую систему 4, а также чувствительный контактный элемент 3 для массажного вмешательства, содержащий массажные ролики 16.
Роботизированный манипуляторный привод 2 выполнен составным из подвижно соединенных между собой звеньев 5 с образованием несоосных переходов 6 в обозначенных местах соединения.
При этом подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена 5 опорного кронштейна, содержащего линейную вертикально ориентированную направляющую 17, на которой с возможностью перемещения установлена каретка 18, движение которой в верхнюю сторону ограничено связующим модулем с упругим элементом 9, который установлен противоположно указанной линейной направляющей 17 на опорном кронштейне 8.
Каретка 18 снабжена удерживающим блоком 19 с установленным на нем указанным чувствительным контактным элементом 3, расположение которого выбрано так, чтобы плоскость, образованная участком контакта поверхности чувствительного контактного элемента 3 с поверхностью тела пользователя была преимущественно перпендикулярна линейной направляющей 17.
Следует отметить, что цель последующего описания предлагаемых вариантов изобретения заключается не в их ограничении конкретными вариантами реализации, а наоборот в охвате всевозможных дополнений, не выходящих за рамки представленной формулы изобретения.
И так, осуществлена предлагаемая группа вариантов, может быть следующим образом.
Предлагаемый контактный физиотерапевтический комплекс манипуляторного типа, как уже было отмечено, оснащен контрольно-управленческой частью 1 и исполнительной частью 24, включающей манипуляторный привод 2, который в свою очередь оснащен чувствительным контактным элементом 3 для прямого непосредственного массажного вмешательства. При этом, следует отметить используемый чувствительный контактный элемент 3 соединен с манипуляторным приводом 2 при помощи подвесной демпфирующей системы 4, которая, в том числе обеспечивает возможность перемещения чувствительного контактного элемента 3 преимущественно в перпендикулярном направлении по отношению к поверхности тела пользователя.
Используемый в подвесной демпфирующей системе 4 связующий модуль с упругим элементом 9, который находится в предварительно напряженном состоянии, является по существу промежуточным элементом, передающим усилие со стороны манипуляторного привода 2 на чувствительный контактный элемент 3, что определяет условия перемещения таким образом, что при превышении силы реакции опоры со стороны тела пользователя заданной величины чувствительный контактный элемент 3 перемещается под действием указанной выше силы.
Таким образом обеспечивается ограничение силы действующей со стороны чувствительного контактного элемента 3 на пользователя.
В качестве контрольно-управленческой части 1 может быть использована система, аналогичная системе, известной из источника информации US10434658, публ. 2019г. [4]. Такая используемая система, известная из [4] включает в себя модуль обработки изображений и контроллер движения. Модуль обработки изображений обрабатывает их, чтобы определить местоположение участка (пятна) на теле пользователя, где будет производиться массажное вмешательство. Контроллер движений управляет манипуляторным приводом 2 для выполнения процедуры массажа на идентифицированном месте массажного воздействия.
В качестве манипуляторного привода 2 может быть использована роботизированная рука одной из моделей “PULSE 75” или “PULSE 90” производства Rozum Robotics, г. Минск (Беларусь), см. (https://rozum.com/robotic-arm/#about [5]). Данные роботизированные руки в настоящее время являются общедоступными и имеют 6 степеней свободы, что позволит перемещать чувствительный контактный элемент 3 практически в любую заданную точку внутри заданной области пространства и ориентировать ее в указанной области под любым углом.
В качестве чувствительного контактного элемента 3 для массажного вмешательства может быть использована массажная насадка, конструкция которой схожа с насадкой, известной из WO2020148624, публ. 2020г. [6].
Следует отметить, что подвесная демпфирующая система 4, согласно авторскому замыслу, призвана для снижения сопровождающихся динамических нагрузок, что позволяет производить размеренное плавное массажное вмешательство с минимальным шансом получения травмы.
Используемый в предлагаемом комплексе связующий модуль с упругим элементом 9 подвесной демпфирующей системы 4 обеспечивает механическую связь чувствительного контактного элемента 3 и манипуляторного привода 2, причем длина модуля с упругим элементом 9 изменяется под действием силы со стороны пользователя на чувствительный контактный элемент 3, который собственно механически связан со связующим модулем с упругим элементом 9.
Перемещение чувствительного контактного элемента 3 для массажного вмешательства в сторону от поверхности тела пользователя при увеличении указанной выше силы определяется коэффициентом жесткости связующего модуля с упругим элементом 9 и параметрами его механической связи с чувствительным контактным элементом 3, а обратное перемещение при снижении указанной силы обеспечивается упругими свойствами связующего модуля с упругим элементом 9.
В первом варианте исполнения контактного физиотерапевтического комплекса (см. фиг. 1, фиг. 2) подвесная демпфирующая система содержит опорный кронштейн 8, который закреплен на манипуляторном приводе 2, вернее на его крайнем звене 5, а также рабочий рычаг 10, на котором собственно крепится чувствительный контактный элемент 3 для массажного вмешательства. При этом ось качения 11 рабочего рычага 10 закреплена непосредственно на опорном кронштейне 8.
Связующий модуль с упругим элементом 9 дополнительно связывает рабочий рычаг 10 и опорный кронштейн 8.
Чувствительный контактный элемент 3 устанавливается так, чтобы его рабочая массажная поверхность располагалась относительно опорного кронштейна 8 так, чтобы ось качения 11 рабочего рычага 10 была преимущественно параллельна плоскости, образованной участком контакта чувствительного контактного элемента 3 и поверхностью тела пациента, при этом указанный участок контакта не пересекал бы плоскость, образованную осью качения 11 рабочего рычага 10 и условным перпендикуляром к плоскости, образованной упомянутым участком контакта. При контакте чувствительного контактного элемента 3 с поверхностью тела пациента сила реакции опоры через рабочий рычаг 10, качающийся на оси качения 11 передается на связующий модуль с упругим элементом 9, который предварительно напряжен. Если сила, действующая на связующий модуль с упругим элементом 9 превысит заданную предварительным напряжением величину, то длина указанного модуля увеличится, что приведет к перемещению рабочего рычага 10 и, соответственно, элемента чувствительного контактного элемента 3, что, в свою очередь, приведет к уменьшению силы реакции опоры на чувствительный контактный элемент 3 со стороны поверхности тела пациента.
При этом контрольно-управленческая часть 1 задает и поддерживает в процессе выполнения массажа такую конфигурацию манипуляторного привода 2, чтобы при качении рабочего рычага 10 под действием силы реакции опоры со стороны тела пользователя происходило бы перемещение чувствительного контактного элемента 3 в направлении, близком к перпендикулярному относительно поверхности тела пользователя на участке (пятно) контакта. Данная конфигурация манипуляторного привода 2 достигается, когда рабочий рычаг 10 и ось качения 11 практически параллельны поверхности тела пациента на участке контакта.
Во втором варианте исполнения, предлагаемого контактного физиотерапевтического комплекса (см. фиг. 1, фиг. 3) подвесная демпфирующая система 4 содержит шарнирный четырехкомпонентный механизм 13, конструкция которого образует условный параллелограмм. Конструкция четырехкомпонентного механизма 13 содержит верхний неподвижный блок 12, который закреплен на крайнем звене 5 манипуляторного привода 2 и нижний подвижный блок 14, на концевом участке, которого собственно крепится чувствительный контактный элемент 3 для массажного вмешательства.
Нижний подвижный блок 14 и верхний неподвижный блок 12 имеют приблизительно одинаковую длину и связаны друг с другом при помощи двух наклонных перемычек 15 приблизительно одинаковой длины, в данном случае коромысел, между которыми установлен связующий модуль с упругим элементом 9, одна часть которого (верхняя) закреплена на верхнем неподвижном блоке 12, а другая часть которого (нижняя) закреплена на нижнем подвижном блоке 14.
Такая полученная подвесная демпфирующая система 4 обеспечивает параллельное перемещение чувствительного контактного элемента 3. При контакте чувствительного контактного элемента 3 с поверхность тела пациента сила реакции опоры через чувствительный контактный элемент 3 воздействует на нижний подвижный блок 14. При этом механическая связь нижнего подвижного блока 14 с верхним неподвижным блоком 12 посредством перемычек 15 сводит перемещение нижнего подвижного блока 14 к плоскопараллельному переносу, при котором изменяется расстояние между блоками 14 и 12 соответственно. При этом происходит воздействие на связующий модуль с упругим элементом 9, который механически связан с блоками 14 и 12 и предварительно напряжен. Если сила, действующая на связующий модуль с упругим элементом 9 превысит заданную предварительным напряжением величину, то длина данного модуля уменьшится, что приведет к перемещению нижнего подвижного блока 14 и, соответственно, чувствительного контактного элемента 3, что, в свою очередь, приведет к уменьшению сила реакции опоры на чувствительный контактный элемент 3 со стороны поверхности тела пациента.
Чувствительный контактный элемент 3 устанавливается так, чтобы его рабочая массажная поверхность располагалась относительно нижнего подвижного блока 14 так, чтобы плоскость, образованная участком (пятно) контакта чувствительного контактного элемента 3 и поверхностью тела пациента была преимущественно перпендикулярна касательной к траектории перемещения нижнего подвижного блока 14 в середине диапазона допустимых перемещений. При этом контрольно-управленческая часть 1 задает и поддерживает в процессе выполнения массажа такую конфигурацию манипуляторного привода 2, чтобы перемещение чувствительного контактного элемента 3 при движении нижнего блока 14 под действием силы реакции опоры со стороны тела пользователя происходило в направлении, близком к перпендикулярному относительно поверхности тела пользователя на участке (пятно) контакта. Данная конфигурация манипуляторного привода 2 достигается, когда нижний подвижный блок 14 и оси его качения параллельны поверхности тела пациента на участке контакта, а угол между нижним подвижным блоком 14 и перемычками 15 небольшой, например, менее 30 градусов.
В третьем варианте исполнения, предлагаемого контактного физиотерапевтического комплекса (см. фиг. 1, фиг. 4) подвесная демпфирующая система содержит опорный кронштейн 8, закрепленный на крайнем звене манипуляторного привода 2, по меньшей мере, одну линейную направляющую 17, закрепленную на самом опорном кронштейне 8. Также имеется каретка 18, которая имеет возможность плоскопараллельного перемещения по линейной направляющей 17. Чувствительный контактный элемент 3 крепится к каретке 18 с помощью удерживающего блока 19. При этом связующий модуль с упругим элементом 9 связывает непосредственно каретку 18 и опорный кронштейн 8. При контакте чувствительного контактного элемента 3 с поверхностью тела пациента сила реакции опоры через данный элемент 3 воздействует на удерживающий блок 19 и, посредством его, на каретку 19, которая перемещается по линейной направляющей 17, закрепленной на опорном кронштейне 8. При этом происходит воздействие на связующий модуль с упругим элементом 9, который механически связан с линейной направляющей 17 и опорным кронштейном 8 и предварительно напряжен. Если сила, действующая на связующий модуль с упругим элементом 9 превысит заданную предварительным напряжением величину, то длина данного модуля уменьшится, что приведет к перемещению каретки 18 и, соответственно, закрепленного на ней удерживающего блока 19 с чувствительным контактным элементом 3, что, в свою очередь, приведет к уменьшению силы реакции опоры на указанный элемент 3 со стороны поверхности тела пациента.
Предложенная подвесная демпфирующая система 4 обеспечивает параллельное перемещение чувствительного контактного элемента 3.
Чувствительный контактный элемент 3 устанавливается так, чтобы его рабочая массажная поверхность располагалась относительно удерживающего блока 19 каретки 18 так, чтобы плоскость, образованная участком (пятно) контакта чувствительного контактного элемента 3 и поверхностью тела пациента была преимущественно перпендикулярна линейной направляющей 17.
При этом контрольно-управленческая часть 1 задает необходимую конфигурацию манипуляторного привода 2, чтобы чувствительный контактный элемент 3 был ориентирован относительно поверхности тела пользователя таким образом, чтобы перемещения каретки 18 по линейной направляющей 17 происходили в направлении близком к перпендикулярному относительно поверхности тела пользователя на участке (пятно) контакта. Данная конфигурация манипуляторного привода 2 достигается, когда линейная направляющая 17 перпендикулярна поверхности тела пациента на участке контакта.
Связующий модуль с упругим элементом 9 может быть выполнен на основе загруженной до заданной величины пружины (см. фиг. 5). Так, например, когда используется условная рычажная система подвеса (1 вариант исполнения, фиг. 1, фиг. 2), то связующий модуль с упругим элементом 9, выполненный в виде пружины, который связывает опорный кронштейн 8 и рабочий рычаг 10 может состоять из цилиндрической винтовой пружины сжатия. При этом предварительное нагружение (сжатие) может быть выполнено при использовании винта 20 (см. фиг. 5). Винт 12 обеспечивает заданную степень сжатия пружины и может ограничивать угол качения рабочего рычага 10, и следовательно, ограничивает диапазон перемещения чувствительного контактного элемента 3.
Следует отметить, что сила сжатия элемента 9, выполненного, в частности, в виде пружины в отсутствии контакта чувствительного контактного элемента 3 с поверхностью тела пациента задается собственно характеристиками пружины и при необходимости положением винта 20.
В случае, когда сила прижатия чувствительного контактного элемента 3 превысит заданную величину, и следовательно сила реакции опоры со стороны также превысит заданную величину, которую можно рассчитать известными методами, сила воздействия на связующий модуль с упругим элементом 9, в частности, выполненного в виде пружины со стороны рабочего рычага 10 превысит силу упругости элемента 9 и рабочий рычаг 10 придет в движение сжимая пружину (элемент 9) и отодвигая чувствительный контактный элемент 3 от поверхности тела пользователя, что снизит силу реакции опоры, приведя подвесную демпфирующую систему 4 в новое состояние равновесия и ограничивая тем самым силу реакции опоры.
В другом варианте реализации связующий модуль с упругим элементом 9 может быть выполнен на основе пневматического цилиндра (см. в частности фиг. 6), давление, в котором имеет заданное значение. Работает связующий модуль с упругим элементом 9 на основе пневматического цилиндра аналогично описанному варианту с выполнением элемента 9 виде пружины, нагруженной до заданной величины. При этом давление в таком пневматическом цилиндре (связующий модуль с упругим элементом 9) в процессе выполнения массажа может регулироваться контрольно-управленческой частью 1 при помощи подачи управляющих сигналов на регуляторы давления, клапана и т.п. элементы, через которые к пневматическому цилиндру (связующий модуль с упругим элементом 9) подсоединены компрессор и/или ресивер, атмосфера. У используемого пневматического цилиндра (связующий модуль с упругим элементом 9) в составе может быть ограничитель перемещения поршня.
Таким образом, использование подвесной демпфирующей системы, согласно представленным вариантам изобретений позволяет обеспечивать эффективность массажа и повысить безопасность пользователя, предотвращая опасные силовые воздействия на него. Помимо этого, обеспечивается безопасность пользователя при сбоях в работе электромеханических компонентов устройства.
По одному из частных вариантов в качестве чувствительного контактного элемента 3 может быть использована массажная насадка, содержащая соединенный с электрическим двигателем вращающийся ротор 22 с множеством осей 23, на которых расположены, вращающиеся массажные ролики 21. Такая насадка используется для компрессионного микровибрационного массажа.
Важно отметить, что контрольно-управленческая часть 1 может содержать блок управления чувствительным контактным элементом 3 и быть подключена к нему с использованием электрических кабелей, встроенных в манипуляторный привод 2 или проложенных внутри него.
Контрольно-управленческая часть 1 получает и обрабатывает изображение пользователя, затем определяет область на теле пользователя, где именно будет производиться массаж. Затем контрольно-управленческая часть 1 управляет движением манипуляторного привода 2, который подводит чувствительный контактный элемент 3 к области воздействия и прижимает его к телу пользователя с заданной силой, ориентировав ее одним из указанных выше способов. Указанные выше сила воздействия определяется параметрами связующего модуля с упругим элементом 9 и текущим положением чувствительного контактного элемента 3 относительно тела пользователя. Дополнительно, указанная выше сила воздействия может контролироваться путем перемещения чувствительного контактного элемента 3 по нормали к поверхности участка контакта на основании показаний датчиков силы и/или перемещения, встроенных в чувствительный контактный элемент 3.
В одном из вариантов эксплуатации ротор 22 чувствительного контактного элемента 3 приводится во вращение электродвигателем. В результате вращающиеся массажные ролики 21, которые расположены на множестве осей вращения 23 ротора 22, при соприкосновении с поверхностью тела пользователя проявляют массажный эффект в виде компрессионной микровибрации, воздействующий на кожу и подкожные ткани с целью восстановления кровообращения, усиления сопротивления и эластичности соединительной ткани.
В процессе массажа, в случае изменения положения тела пользователя при наличии нормальной к поверхности тела на участке контакта составляющей перемещения возможны два варианта.
В первом варианте, когда поверхность тела пользователя перемещается от чувствительного контактного элемента 3 сила прижима, создаваемая связующим модулем с упругим элементом 9 перемещает чувствительный контактный элемент 3, прижимая ее к поверхности тела пользователя, что позволяет компенсировать перемещение тела и продолжить массаж.
Во втором варианте, когда поверхность тела пользователя перемещается к чувствительному контактному элементу 3, нормальная сила реакции опоры со стороны тела перемещает чувствительный контактный элемент 3 за счет изменения длины упругой связи, создаваемой модулем с упругим элементом 9. В этом случае сила прижима чувствительного контактного элемента 3 к поверхности тела изменяется в пределах заданных значений, определяемых параметрами модуля с упругим элементом 9. Тем самым пользователь ограничен от небезопасного механического воздействия и позволяет компенсировать перемещение тела и проложить массаж.
Предлагаемая группа изобретений (варианты) может быть успешно использована в лечебно-профилактических целях, а также для оздоровления организма. Данная группа обеспечивает высокую эффективность и безопасность и позволяет проводить массажное вмешательство полностью в автоматическом режиме. Предлагаемый физиотерапевтический комплекс может использоваться как лекарство для лечения суставов, для лечения контрактур мышц и рубцов, может использоваться спортсменами в качестве средства для улучшения и поддержания физической формы, для подготовки к участиям в спортивных мероприятиях, а также использоваться как реабилитационное средство для восстановления после перенесенных травм, заболеваний. Кроме того, предлагаемая группа может быть привлечена для лечения заболеваний лимфатической системы, для стимуляции ступней, для активации кровообращения, для лечения венозной недостаточности и тромбофлебита.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| КОМПЛЕКСНАЯ ОЗДОРОВИТЕЛЬНАЯ УСТАНОВКА ДЛЯ ОКАЗАНИЯ ЛЕЧЕБНО-ПРОФИЛАКТИЧЕСКОГО ВОЗДЕЙСТВИЯ НА РАЗЛИЧНЫЕ УЧАСТКИ КОЖНОГО ПОКРОВА ЧЕЛОВЕЧЕСКОГО ТЕЛА | 2021 |
|
RU2773395C1 |
| МОБИЛЬНОЕ РОБОТИЗИРОВАННОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ В АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ ХРАНЕНИЯ И ПОИСКА | 2024 |
|
RU2831700C1 |
| Тензоалгометрический блок системы управления роботизированным манипулятором | 2018 |
|
RU2695020C1 |
| Кресло многофункциональное, роботизированное, с программным управлением (ЧПУ), для лечебных и иных процедур полостей тела; инновационные методы и технологии оборудования процедурного кабинета, рабочего места врача и участия врача в лечебном процессе | 2018 |
|
RU2705142C1 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО С ПОДВИЖНОЙ КОНСТРУКЦИЕЙ, ТАКОЕ КАК РОБОТ | 2018 |
|
RU2763460C2 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |



Группа изобретений относится к автоматизированному физиотерапевтическому оборудованию и может быть использована для проведения оздоровительных массажных операций. Физиотерапевтический комплекс манипуляторного типа содержит контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, которая включает роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного вмешательства. Роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения. Подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена опорного кронштейна, на нижнем концевом участке которого с возможностью качения установлен рабочий рычаг, один из крайних участков которого оснащен упомянутым чувствительным контактным элементом для массажного вмешательства, а другой из крайних участков посредством связующего модуля с упругим элементом соединен с противоположной частью опорного кронштейна. Расположение указанного чувствительного контактного элемента выбрано так, чтобы, во-первых, ось качения рабочего рычага была преимущественно параллельна плоскости, образованной участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя, а во-вторых, чтобы указанный участок контакта был за пределами плоскости, образованной осью качения рабочего рычага и условным перпендикуляром к плоскости, образованной участком контакта. Обеспечивается повышение безопасности при эксплуатации путем возможности эксплуатационного контроля и ограничения, при необходимости, оказываемого силового массажного действия. 3 н.п. ф-лы, 7 ил.
1. Контактный массажный комплекс манипуляторного типа, содержащий контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного воздействия, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена опорного кронштейна, на нижнем концевом участке которого с возможностью качения установлен рабочий рычаг, один из крайних участков которого оснащен упомянутым чувствительным контактным элементом для массажного воздействия, а другой из участков рабочего рычага посредством связующего модуля с упругим элементом соединен со стыковочным участком опорного кронштейна, при этом расположение указанного чувствительного контактного элемента выбрано так, чтобы, во-первых, ось качения рабочего рычага была преимущественно параллельна плоскости, образованной участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя, а во-вторых, чтобы указанный участок контакта был за пределами плоскости, образованной осью качения рабочего рычага и условным перпендикуляром к плоскости, образованной участком контакта.
2. Контактный массажный комплекс манипуляторного типа, содержащий контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного воздействия, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система выполнена в виде шарнирного, по меньшей мере, четырехкомпонентного механизма, конструкция которого образует условный параллелограмм, при этом верхняя часть упомянутого механизма выполнена в виде неподвижно закрепленного на свободном концевом участке звена соответственно верхнего блока, а нижняя часть выполнена в виде подвижного соответственно нижнего блока, концевой участок которого снабжен упомянутым чувствительным контактным элементом, причем указанные верхний и нижний блоки объединены между собой двумя наклоненными перемычками, между которыми расположен связующий модуль с упругим элементом, одна часть которого зафиксирована на верхнем блоке, а другая механически связана с нижним блоком, при этом расположение указанного чувствительного контактного элемента выбрано так, что плоскость, образованная участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя, преимущественно перпендикулярна касательной к траектории перемещения нижнего блока в средней части диапазона допустимых перемещений.
3. Контактный массажный комплекс манипуляторного типа, содержащий контрольно-управленческую часть и взаимосвязанную с ней исполнительную часть, включающую роботизированный манипуляторный привод, подвесную демпфирующую систему и чувствительный контактный элемент для массажного воздействия, отличающийся тем, что роботизированный манипуляторный привод выполнен составным из подвижно соединенных между собой звеньев с образованием несоосных переходов в указанных местах соединения, подвесная демпфирующая система состоит из закрепленного на свободном концевом участке звена опорного кронштейна, содержащего линейную вертикально ориентированную направляющую, на которой с возможностью перемещения установлена каретка, движение которой в верхнюю сторону ограничено связующим модулем с упругим элементом, установленным на соединительной части опорного кронштейна, при этом каретка снабжена удерживающим блоком с установленным на нем упомянутым чувствительным контактным элементом, расположение которого выбрано так, чтобы плоскость, образованная участком контакта поверхности чувствительного контактного элемента с поверхностью тела пользователя, была преимущественно перпендикулярна линейной направляющей.
| Способ автоматического регулирования степени загрузки шаровых невентилируемых мельниц по шуму, производимому мельницей | 1957 |
|
SU115205A1 |
| СПОСОБ МАССАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145833C1 |
| CN 210277652 U, 10.04.2020 | |||
| CN 209108022 U, 16.07.2019 | |||
| RU 105585 U1, 20.06.2011 | |||
| Прибор для экспресс-контроля влажности, например, теста или хлеба | 1955 |
|
SU105587A1 |
| CN 110882150 A, 17.03.2020. | |||

