Область техники
[1] Раскрытие относится к устройству очистки, включающему в себя пылесос и станцию разгрузки.
Предпосылки создания изобретения
[2] В целом пылесосом является устройство, которое оборудовано вентиляторным двигателем, генерирующим мощность всасывания и выполненным с возможностью всасывать инородное вещество, такое как пыль, вместе с воздухом, используя мощность всасывания, генерируемую вентиляторным двигателем, отделять и собирать всасываемое инородное вещество из воздуха, так что выполняется очистка.
[3] С этой целью пылесос включает в себя пылесборный контейнер для сбора инородного вещества, и пользователь должен периодически удалять собранное инородное вещество из пылесборного контейнера. Однако, когда пользователь удаляет инородное вещество из пылесборного контейнера, инородное вещество может разлетаться, что может увеличивать концентрацию пыли в помещении.
В патентной заявке US 2016/0183752 A1, 30.06.2016, Evacuation station (Станция откачки) раскрыта станция откачки, включающая в себя основание и контейнер, съемным образом прикрепленный к основанию. Основание включает в себя платформу с наклонной поверхностью для установки робота-пылесоса с резервуаром для мусора. Платформа образует впускное отверстие для откачки, предназначенное для пневматической стыковки с резервуаром для мусора. Основание также включает в себя первую часть трубопровода, пневматически соединенную с впускным отверстием для откачки, вентилятор, имеющий впускное и выпускное отверстия, и фильтр твердых частиц, пневматически соединенный с выпускным отверстием вентилятора. Контейнер включает в себя вторую часть трубопровода, выполненную с возможностью пневматической стыковки с первой частью трубопровода для формирования пневматического канала впуска мусора, выпускной канал, предназначенный для пневматического соединения с впускным отверстием вентилятора, когда контейнер прикреплен к основанию, и сепаратор, находящийся в пневматическом сообщении со второй частью трубопровода. Данное решение является ближайшим аналогом заявленного изобретения.
В патентной заявке US 2016/0051102 A1, 25.02.2016, Vacuum cleaner (Пылесос) раскрыт пылесос, который подает горячий воздух, чтобы высушить очищаемые предметы и предотвратить их прилипание. Пылесос включает в себя первое нижнее воздухозаборное отверстие, заднее воздуховыпускное отверстие, корпус, имеющий воздушный канал для направления первого воздушного потока от первого нижнего воздухозаборного отверстия к заднему воздуховыпускному отверстию, а также электрический вентилятор в воздушном канале для всасывания первого воздушного потока. Корпус включает в себя входное отверстие для встречного потока, которое всасывает второй воздушный поток снаружи и направляет его в качестве встречного потока против первого воздушного потока, предотвращая прилипание очищаемых предметов. Нижнее воздуховыпускное отверстие выпускает горячий воздух, нагретый при прохождении мимо электрического вентилятора. Регулятор направления потока изменяет направление горячего воздуха к заднему и/или нижнему воздуховыпускным отверстиям. Пользователь выборочно управляет направлением потока горячего воздуха к очищаемым предметам, тем самым высушивая их. Встречный воздушный поток подается против потока всасываемого в корпус воздуха и предотвращает прилипание очищаемых предметов, тем самым повышая удобство использования.
В патенте KR 960011002 B1, 16.08.1996, Apparatus and process for suction of a vacuum cleaner (Устройство и способ всасывания пылесосом) раскрыты устройство и способ для автоматического восстановления исходной скорости всасывания после кратковременного выполнения режима максимальной скорости в пылесосе всего за одно нажатие переключателя для максимизирования эффективности очистки. Устройство содержит источник питания, подающий электроэнергию для каждого компонента, средство ввода сигнала мгновенного всасывания, включающее в себя первый переключатель, вводящий сигнал пуска или остановки, второй переключатель, вводящий сигнал ускорения, третий переключатель, вводящий сигнал замедления, и переключатель, вводящий сигнала мгновенного всасывания, микропроцессор, управляющий всеми функциями на основе сигналов средства ввода сигнала, устройство отображения, отображающее состояния работы согласно сигналам микропроцессора, регулятор скорости, управляющий скоростью всасывающего двигателя.
[4] Вышеупомянутая информация представлена в виде информации о предпосылках только для помощи в понимании раскрытия. Не было сделано никакого определения, и не делается никакого утверждения относительно того, может ли применяться вышеупомянутое в качестве предшествующего уровня техники относительно раскрытия.
Раскрытие
Техническая проблема
[5] Аспекты раскрытия предназначены решить по меньшей мере вышеупомянутые проблемы и/или недостатки и обеспечить по меньшей мере преимущества, описанные ниже. Соответственно, аспект раскрытия состоит в предоставлении устройства очистки, включающего в себя станцию разгрузки, которая обеспечивает автоматическую выгрузку инородных веществ из пылесборного контейнера пылесоса путем обеспечения нерегулярного всасывающего воздушного потока при стыковке пылесборного контейнера.
[6] Дополнительные аспекты будут частично изложены в описании, которое следует, и частично будут очевидны из описания или могут быть изучены при практической реализации представленных вариантов осуществления.
Техническое решение
В соответствии с аспектом предоставлено устройство очистки. Устройство очистки включает в себя пылесос, включающий в себя пылесборный контейнер, и станцию разгрузки, с которой соединяется пылесборный контейнер, причем станция разгрузки включает в себя всасывающее устройство, выполненное с возможностью перемещать воздух из пылесборного контейнера во внутреннюю часть станции разгрузки, сборник (накопитель), выполненный с возможностью собирать инородное вещество, которое перемещается вместе с воздухом путем приведения в действие всасывающего устройства, канал всасывающего потока, по которому воздух перемещается внутрь станции разгрузки, устройство регулировки расхода, выполненное с возможностью открывать или закрывать канал всасывающего потока, и по меньшей мере один процессор, выполненный с возможностью управлять работой всасывающего устройства в ответ на соединение пылесборного контейнера со станцией разгрузки, и управлять устройством для регулировки расхода для периодического открытия и закрытия канала всасывающего потока в состоянии, в котором всасывающее устройство работает.
[8] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью управлять всасывающим устройством и устройством регулировки расхода для прекращения работы на основании предварительно заданного времени работы, истекающего после инициирования работы всасывающего устройства.
[9] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью устанавливать увеличенным заданное время работы на основании снижения частоты внешнего питания.
[10] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью устанавливать заданное время работы таким образом, чтобы устройство регулировки расхода прекращало работу в состоянии открытия канала всасывающего потока на основании периода открытия и закрытия устройства регулировки расхода для канала всасывающего потока.
[11] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью управлять устройством регулировки расхода для закрытия канала всасывающего потока на основании предварительно заданного времени ожидания, истекающего после прекращения работы всасывающего устройства.
[12] Станция разгрузки дополнительно может включать в себя датчик определения положения, выполненный с возможностью выдавать первое значение в ответ на закрытие канала всасывающего потока устройством регулировки расхода, и выдавать второе значение в ответ на открытие канала всасывающего потока устройством регулировки расхода, и упомянутый по меньшей мере один процессор, поскольку частота внешнего источника питания становится ниже, может быть дополнительно выполнен с возможностью задерживать момент времени, в котором канал всасывающего потока определяется как закрытый после инициирования выдачи первого значения.
[13] При управлении работой всасывающего устройства упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью подавать напряжение на всасывающее устройство и управлять устройством регулировки расхода для открытия канала всасывающего потока, когда напряжение, подаваемое на всасывающее устройство, увеличивается до целевого напряжения.
[14] Станция разгрузки может дополнительно включать в себя устройство ввода, выполненное с возможностью принимать ввод от пользователя.
[15] Упомянутый по меньшей мере один процессор в ответ на получение команды на действие через устройство ввода в ответ на соединение пылесборного контейнера со станцией разгрузки может быть дополнительно выполнен с возможностью управлять всасывающим устройством и устройством регулировки расхода для работы в течение заданного времени работы.
[16] Упомянутый по меньшей мере один процессор в ответ на прием команды на остановку через устройство ввода, когда всасывающее устройство и пылесборный контейнер работают, может дополнительно быть выполнен с возможностью управлять устройством регулировки расхода для открытия канала всасывающего потока и управлять всасывающим устройством для прекращения работы после заданного времени ожидания от ввода (входного сигнала) команды на остановку.
[17] Упомянутый по меньшей мере один процессор в ответ на получение ввода режима всасывания через устройство ввода может быть дополнительно выполнен с возможностью управлять работой всасывающего устройства и управлять устройством регулировки расхода для открытия канала всасывающего потока при работе всасывающего устройства.
[18] Станция разгрузки может дополнительно включать в себя устройство отображения, на котором отображается рабочее состояние, и датчик сборника, выполненный с возможностью детектировать, находится ли сборник в заполненном состоянии, причем упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью управлять устройством отображения для отображения степени наполнения сборника в ответ нахождение сборника в заполненном состоянии.
[19] Станция разгрузки может дополнительно включать в себя ультрафиолетовую лампу, выполненную с возможностью облучать ультрафиолетовыми лучами по меньшей мере один из пылесборного контейнера или сборника.
[20] В соответствии с другим аспектом раскрытия предоставлено устройство очистки. Устройство очистки включает в себя пылесос, включающий в себя пылесборный контейнер, и станцию разгрузки, с которой соединяется пылесборный контейнер, причем станция разгрузки включает в себя всасывающий вентилятор, выполненный с возможностью перемещать воздух из пылесборного контейнера во внутреннюю часть станции разгрузки, двигатель, выполненный с возможностью вращать всасывающий вентилятор, и по меньшей мере один процессор, выполненный с возможностью регулировать по меньшей мере одно из времени приведения в действие двигателя или частоты вращения двигателя при повторении операций включения и выключения двигателя.
[21] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью регулировать по меньшей мере одно из времени, в течение которого двигатель находится во включенном состоянии, или времени, в течение которого двигатель находится в выключенном состоянии, всякий раз, когда двигатель попеременно включается и выключается.
[22] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью регулировать длительность импульса напряжения источника питания, подаваемого на двигатель, всякий раз, когда двигатель попеременно включается и выключается, для регулировки частоты вращения двигателя.
[23] Упомянутый по меньшей мере один процессор может быть дополнительно выполнен с возможностью устанавливать различные длительности импульсов для импульсов напряжения источника питания в пределах по меньшей мере одного временного отрезка среди временных отрезков, в течение которого двигатель включается или выключается, так что двигатель вибрирует.
[24] Станция разгрузки может дополнительно включать в себя канал всасывающего потока, по которому воздух перемещается внутри станции разгрузки, и устройство регулировки расхода, выполненное с возможностью открывать или закрывать канал всасывающего потока, причем упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью управлять двигателем для нахождения его во включенном состоянии в ответ на открытие канала всасывающего потока устройством регулировки расхода, и управлять двигателем для нахождения в выключенном состоянии в ответ на закрытие канала всасывающего потока устройством регулировки расхода.
[25] В соответствии с другим аспектом раскрытия предоставлен способ управления устройством очистки, содержащим пылесос. Способ включает в себя пылесборный контейнер и станцию разгрузки, с которой соединяется пылесборный контейнер, причем способ включает в себя управление всасывающим устройством, которое выполнено с возможностью перемещать воздух из пылесборного контейнера во внутреннюю часть станции разгрузки, для работы в ответ на соединение пылесборного контейнера со станцией разгрузки, и управление устройством регулировки расхода для периодического открытия и закрытия канала всасывающего потока, по которому воздух перемещается внутри станции разгрузки, в состоянии, в котором всасывающее устройство работает.
[26] Способ может дополнительно включать в себя управление всасывающим устройством и устройством регулировки расхода для прекращения работы на основании предварительно заданного времени работы, истекающего после инициирования работы всасывающего устройства.
Преимущественные эффекты
[27] Аспекты раскрытия предназначены решить по меньшей мере вышеупомянутые проблемы и/или недостатки и обеспечить по меньшей мере преимущества, описанные ниже. Соответственно, аспект раскрытия состоит в предоставлении устройства очистки, включающего в себя станцию разгрузки, которая обеспечивает автоматическую выгрузку инородных веществ из пылесборного контейнера пылесоса путем обеспечения неравномерного всасывающего воздушного потока при стыковке пылесборного контейнера.
[28] Дополнительные аспекты будут частично изложены в описании, которое следует ниже, и частично будут очевидны из описания или могут быть изучены при осуществлении на практике представленных вариантов осуществления.
Описание чертежей
[29] Фиг.1 представляет собой внешний вид, показывающий устройство очистки в соответствии с вариантом осуществления раскрытия;
[30] Фиг.2 представляет собой вид, показывающий состояние, в котором пылесборный контейнер пылесоса соединен со станцией разгрузки в соответствии с вариантом осуществления раскрытия;
[31] Фиг. 3 представляет собой вид в перспективе в разобранном виде элементов, показывающий станцию разгрузки в соответствии с вариантом осуществления раскрытия;
[32] Фиг.4 представляет собой вид в разрезе сбоку, показывающий станцию разгрузки в соответствии с вариантом осуществления раскрытия;
[33] Фиг.5 представляет собой блок-схему управления, показывающую станцию разгрузки в соответствии с вариантом осуществления раскрытия;
[34] Фиг.6 представляет собой вид, показывающий случай, в котором станция разгрузки автоматически работает при соединении с пылесборным контейнером в соответствии с вариантом осуществления раскрытия;
[35] Фиг.7 представляет собой вид, показывающий случай, в котором станция разгрузки работает в ответ на ввод команды на действие в соответствии с вариантом осуществления раскрытия;
[36] Фиг.8 представляет собой вид для описания момента времени, когда станция разгрузки определяет закрытие канала всасывающего потока в связи с частотой внешнего питания в соответствии с вариантом осуществления раскрытия;
[37] Фиг. 9 представляет собой вид для описания случая, в котором станция разгрузки начинает работу в соответствии с вариантом осуществления раскрытия;
[38] Фиг. 10 представляет собой вид, показывающий случай, в котором станция разгрузки прекращает работу в ответ на ввод команды на остановку при открытии канала всасывающего потока в соответствии с вариантом осуществления раскрытия;
[39] Фиг.11 представляет собой вид, показывающий случай, в котором станция разгрузки прекращает работу в ответ на ввод команды на остановку при закрытии канала всасывающего потока в соответствии с вариантом осуществления раскрытия;
[40] Фиг.12 представляет собой график, показывающий изменяющееся во времени управление включением-выключением первого двигателя в соответствии с вариантом осуществления раскрытия;
[41] Фиг.13 представляет собой вид для описания случая, в котором обеспечена разная частота вращения всякий раз, когда повторяется включение в работу первого двигателя в соответствии с вариантом осуществления раскрытия;
[42] Фиг.14 представляет собой вид для описания случая, в котором первый двигатель вибрирует для передачи вибрации пылесборному контейнеру в соответствии с вариантом осуществления раскрытия;
[43] Фиг.15 представляет собой вид для описания управления первым двигателем в связи с работой клапана канала потока в соответствии с вариантом осуществления раскрытия;
[44] Фиг.16 представляет собой вид для описания случая, в котором станция разгрузки выполняет режим всасывания в соответствии с вариантом осуществления раскрытия;
[45] Фиг.17 представляет собой вид для описания случая, в котором станция разгрузки выполняет режим отображения в соответствии с вариантом осуществления раскрытия;
[46] Фиг.18 представляет собой вид для описания случая, в котором станция разгрузки определяет степень наполнения сборника в соответствии с вариантом осуществления раскрытия;
[47] Фиг.19 представляет собой вид для описания случая, в котором станция разгрузки излучает ультрафиолетовые лучи в соответствии с вариантом осуществления раскрытия;
[48] Фиг.20 представляет собой блок-схему операций способа управления устройством очистки в соответствии с вариантом осуществления, которая показывает автоматическую работу при соединении с пылесборным контейнером в соответствии с вариантом осуществления раскрытия;
[49] Фиг.21 представляет собой блок-схему операций способа управления устройством очистки, которая показывает работу в ответ на ввод команды на действие по раскрытию;
[50] Фиг.22 представляет собой блок-схему операций способа управления устройством очистки, которая показывает прекращение работы в ответ на ввод команды на остановку в соответствии с вариантом осуществления раскрытия;
[51] Фиг.23 представляет собой блок-схему операций способа управления устройством очистки, которая показывает случай, в котором расход всасывающего воздушного потока регулируют путем управления первым двигателем в соответствии с вариантом осуществления раскрытия;
[52] Фиг.24 представляет собой блок-схему операций способа управления устройством очистки, которая показывает случай, в котором первым двигателем управляют в связи с работой клапана канала потока в соответствии с вариантом осуществления раскрытия;
[53] Фиг.25 представляет собой блок-схему операций способа управления устройством очистки, которая показывает выполнение режима всасывания в соответствии с вариантом осуществления раскрытия;
[54] Фиг.26 представляет собой блок-схему операций способа управления устройством очистки, которая показывает выполнение режима отображения в соответствии с вариантом осуществления раскрытия; и
[55] Фиг.27 представляет собой блок-схему операций способа управления устройством очистки, которая показывает отображение степени наполнения сборника в соответствии с вариантом осуществления раскрытия.
Наилучший режим осуществления изобретения
[56] Нижеследующее описание со ссылкой на прилагаемые чертежи предоставлено для помощи во всестороннем понимании различных вариантов осуществления раскрытия, которые определены формулой изобретения и ее эквивалентами. Оно включает в себя различные конкретные подробности, помогающие в этом понимании, но их следует рассматривать только в качестве примеров. Соответственно, специалисты в данной области техники поймут, что без отступления от объема и сущности раскрытия могут быть выполнены различные изменения и модификации различных вариантов осуществления, описанных здесь. Кроме того, описания хорошо известных функций и конструкций могут быть опущены для ясности и краткости.
[57] Термины и слова, используемые в нижеследующем описании и формуле изобретения, не ограничиваются библиографическими значениями, а просто используются автором изобретения для обеспечения четкого и последовательного понимания раскрытия. Соответственно, для специалистов в данной области техники должны быть очевидным, что нижеследующее описание различных вариантов осуществления раскрытия представлено только в целях иллюстрации, а не с целью ограничения раскрытия, которое определено в прилагаемой формуле изобретения и ее эквивалентах.
[58] Следует понимать, что формы единственного числа включают в себя формы множественного числа, если в контексте явно не указано иное. Таким образом, например, ссылка на «поверхность элемента» включает в себя ссылку на одну или более таких поверхностей.
[59] Кроме того, будет понятно, что термин «соединять» или его производные относятся как к прямому, так и к непрямому соединению, и непрямое соединение включает в себя соединение по сети беспроводной связи.
[60] Термины, используемые здесь, предназначены для описания вариантов осуществления и не предназначены для ограничения раскрытия. Например, выражения в единственном числе здесь могут включать в себя выражения во множественном числе, если в контексте явно не указано иное. Кроме того, термины «содержит» и «имеет» предназначены для указания на наличие признаков, чисел, операций, элементов, частей или их комбинаций, описанных в спецификации, и не исключают наличия или добавления одного или более других признаков, чисел, операций, элементов, частей или их комбинаций.
[61] Будет понятно, что, хотя термины «первый», «второй» и т.д. могут использоваться здесь для описания различных компонентов, эти компоненты не должны ограничиваться этими терминами. Эти термины используются только для различения одного компонента от другого. Например, без отступления от объема раскрытия, первый компонент может называться вторым компонентом, и подобным образом второй компонент также может называться первым компонентом. Термин «и/или» включает в себя любую комбинацию множества связанных элементов или любого одного из множества связанных элементов.
[62] Более того, термины, описанные в спецификации, такие как «часть», «модуль» и «блок», относятся к блоку обработки по меньшей мере одной функции или операции и могут быть реализованы программным обеспечением, аппаратным компонентом, таким как вентильная матрица, программируемая пользователем (FPGA), или специализированная микросхема (ASIC), или комбинацией программного и аппаратного обеспечения.
[63] Ссылочные позиции, используемые для операций способа, используются только для удобства объяснения, но не для ограничения порядка операций. Таким образом, если в контексте явно не указано иное, написанный порядок может быть осуществлен на практике иначе.
[64] Здесь далее со ссылкой на сопроводительные чертежи будут подробно описаны различные варианты осуществления в соответствии с раскрытием.
[65] Фиг.1 представляет собой внешний вид, показывающий устройство очистки в соответствии с вариантом осуществления раскрытия, и фиг.2 - вид, показывающий положение, в котором пылесборный контейнер пылесоса соединяется со станцией разгрузки в соответствии с вариантом осуществления раскрытия.
[66] Обращаясь к фиг.1, устройство 1 очистки в соответствии с вариантом осуществления может включать в себя пылесос 10, включающий в себя пылесборный контейнер 15, выполненный с возможностью хранения всасываемых инородных веществ, и станцию 100 разгрузки, выполненную с возможностью всасывания инородных веществ, хранящихся в пылесборном контейнере 15, при соединении с пылесборным контейнером 15 для удаления инородных веществ из пылесборного контейнера.
[67] Пылесос 10 в соответствии с вариантом осуществления включает в себя корпус 11 пылесоса, удлинительную трубку (не показана), соединенную с возможностью отсоединения с корпусом 11 пылесоса, всасывающий блок (не показан), соединенный с возможностью отсоединения с удлинительной трубкой (не показана), и пылесборный контейнер 15, соединенный с возможностью отсоединения с корпусом 11 пылесоса.
[68] Корпус 11 пылесоса может включать в себя всасывающий (вакуумный) двигатель (не показан), который создает всасывающую силу, необходимую для всасывания инородных веществ с очищаемой поверхности, и пылесборный контейнер 15, в котором размещаются инородные вещества, всасываемые с очищаемой поверхности.
[69] Пылесборный контейнер 15 расположен выше по ходу воздушного потока относительно всасывающего двигателя и выполнен с возможностью фильтрации и сбора пыли или грязи в воздухе, втекающем в пылесборный контейнер 15 через всасывающий блок (не показан). Пылесборный контейнер 15 может быть установлен с возможностью отсоединения в корпусе 11 пылесоса.
[70] Пылесос 10 может включать в себя корпус 12 фильтра. Корпус 12 фильтра выполнен в по существу форме пончика для размещения в нем фильтра (не показан). Тип фильтра не ограничен, но, например, внутри корпуса 12 фильтра может быть расположен высокоэффективный фильтр твердых частиц (HEPA). Фильтр может фильтровать ультрадисперсную пыль и тому подобное, которые не отфильтровываются из пылесборного контейнера 15. Корпус 12 фильтра может включать в себя выпускное отверстие 13, так что воздух, проходящий через фильтр, выпускается на наружную сторону пылесоса 10.
[71] Корпус 11 пылесоса может включать в себя ручку 14, которую пользователь может схватывать для манипулирования пылесосом 10. Пользователь может удерживать ручку 14 и перемещать пылесос 10 вперед и назад.
[72] Корпус 11 пылесоса может включать в себя батарею 16, обеспечивающую движущую силу пылесоса 10. Батарея 16 может быть установлена с возможностью отсоединения в корпусе 11.
[73] Корпус 11 пылесоса может включать в себя манипуляторную часть 17. Пользователь может включать/выключать пылесос 10 или регулировать всасывающую силу путем манипулирования кнопкой питания или тому подобным, предусмотренным на манипуляторной части 17.
[74] Корпус 11 пылесоса может включать в себя направляющую 30 для сбора пыли, которая направляет инородное вещество в пылесборный контейнер 15 путем соединения пылесборного контейнера 15 с удлинительной трубкой (не показана) и всасывающим блоком (не показан).
[75] Направляющая 30 для сбора пыли может быть соединена с вышеописанной удлинительной трубкой (не показана) при направлении инородного вещества в пылесборный контейнер 15, как описано выше. Кроме того, направляющая 30 для сбора пыли может быть выполнена с возможностью непосредственного соединения с всасывающим блоком (не показан) в дополнение к удлинительной трубке (не показана) или соединения с другими компонентами, такими как вспомогательный всасывающий блок.
[76] Соответственно, пользователь может соединять различные компоненты с направляющей 30 для сбора пыли в соответствии с местом очистки, повышая удобство очистки.
[77] Обращаясь к фиг.2, станция 100 разгрузки в соответствии с вариантом осуществления может включать в себя корпус 101 и гнездо 102 для стыковки, образованное обеспечивающим стыковку с ним пылесборного контейнера 15 пылесоса 10. Гнездо 102 для стыковки может включать в себя установочный (посадочный) участок 181, на который устанавливают пылесборный контейнер 15.
[78] Кроме того, станция 100 разгрузки может включать в себя крышку 103, расположенную поверх корпуса 101 и выполненную с возможностью открытия и закрытия гнезда 102 для стыковки.
[79] Кроме того, станция 100 разгрузки может включать в себя устройство 120 ввода, предусмотренное на его верхнем участке для приема ввода от пользователя. Устройство 120 ввода, как показано на фиг.2, может быть предусмотрено в виде кнопки, переключателя и тому подобного. Однако, местоположение и тип устройства 120 ввода не ограничены этим при условии, что устройство ввода может принимать ввод от пользователя.
[80] Кроме того, станция 100 разгрузки может включать в себя панель 104, расположенную на передней поверхности корпуса 101 и предусмотренную отделяемой от корпуса 101. Панель 104 может быть расположена на боковой поверхности или задней поверхности, а также на передней поверхности корпуса 101 с возможностью отсоединения от корпуса 101.
[81] Поскольку панель 104 отделяется от корпуса 101, пользователь может открыть сборник, который будет описан ниже, и может легко заменить пылевой мешок сборника.
[82] Кроме того, станция 100 разгрузки может дополнительно включать в себя устройство 170 отображения, предусмотренное на его передней поверхности и отображающее рабочее состояние станции 100 разгрузки. Например, как показано на фиг.2, устройство 170 отображения может соответствовать светодиодной (LED) панели, которая излучает свет. Однако, расположение и тип устройства 170 отображения не ограничены этим при условии, что устройство 170 отображения может отображать рабочее состояние.
[83] В этом случае станция 100 разгрузки может быть выполнена с возможностью автоматической выгрузки инородных веществ из пылесборного контейнера 15 путем изменения всасывающего воздушного потока, подаваемого в пылесборный контейнер 15 пылесоса 10.
[84] Обращаясь к фиг.1 и 2, станция 100 разгрузки в соответствии с вариантом осуществления может быть выполнена с возможностью обеспечения стыковки с ней только пылесборного контейнера 15 без конструкции, с которой стыкуется направляющая 30 для сбора пыли.
[85] То есть в станции 100 разгрузки в соответствии с вариантом осуществления, даже когда со станцией 100 разгрузки состыкован только пылесборный контейнер 15 пылесоса 10, может эффективно выполняться автоматическая выгрузка станции 100 разгрузки.
[86] Следовательно, пользователь может отделять только пылесборный контейнер 15 от пылесоса 10 и стыковать пылесборный контейнер 15 со станцией 100 разгрузки, а не стыковать пылесос 10 в целом со станцией 100 разгрузки. Соответственно, размер станции 100 разгрузки может быть уменьшен, и пыль может автоматически выгружаться при простом отделении пылесборного контейнера 15.
[87] Однако, тип станции 100 разгрузки не ограничивается вышеприведенным примером, и в соответствии с вариантом осуществления станция 100 разгрузки может включать в себя компонент, с которым соединяется направляющая 30 для сбора пыли, так что пылесос 10 как одно целое может быть состыкован со станцией 100 разгрузки, и может подавать всасывающий воздушный поток в пылесборный контейнер 15, когда пылесос 10 состыкован как одно целое.
[88] Далее будет описан вариант осуществления пылесборного контейнера 15, отделяемого и стыкуемого со станцией 100 разгрузки, но раскрытие этим не ограничивается, и следующее описание может быть применено к варианту осуществления пылесоса 10, состыкованному как одно целое со станцией 100 разгрузки.
[89] Фиг. 3 представляет собой вид в перспективе в разобранном виде станции 100 разгрузки в соответствии с вариантом осуществления раскрытия, и фиг.4 - вид в разрезе сбоку, показывающий станцию 100 разгрузки в соответствии с вариантом осуществления раскрытия.
[90] Обращаясь к фиг.3 и 4, станция 100 разгрузки в соответствии с вариантом осуществления может быть снабжено всасывающим устройством 150 и выгружать инородные вещества, собранные в пылесборном контейнере 15, из пылесборного контейнера 15. Всасывающее устройство 150 может быть расположено внутри корпуса 101 и включает в себя всасывающий вентилятор 153 для перемещения воздуха и первый двигатель 151 для вращения всасывающего вентилятора 153.
[91] Станция 100 разгрузки в соответствии с вариантом осуществления может включать в себя сборник 190, в котором собираются инородные вещества, выгруженные из пылесборного контейнера 15. Сборник 190 может быть расположен внутри корпуса 101. Сборник 190 может быть расположен выше по ходу воздушного потока относительно всасывающего устройства 150.
[92] Станция 100 разгрузки в соответствии с вариантом осуществления включает в себя канал 180 всасывающего потока, включающий в себя один конец, соединенный с пылесборным контейнером 15, и другой конец, соединенный с всасывающим устройством 150, и через который течет воздух, перемещаемый всасывающим устройством 150.
[93] Подробно, канал 180 всасывающего потока может соединять гнездо 102 для стыковки с всасывающим устройством 150. В этом случае сборник 190 может быть предусмотрен на канале 180 всасывающего потока.
[94] То есть канал 180 всасывающего потока соединяет гнездо 102 для стыковки (разгрузки) со сборником 190, так что инородное вещество, выгружаемое из пылесборного контейнера 15, всасывается в сборник 190 через гнездо 102 для стыковки.
[95] Гнездо 102 для стыковки может включать в себя установочный участок 181, который сообщается с каналом 180 всасывающего потока и на котором установлен пылесборный контейнер 15.
[96] Установочным участком 181 может быть пространство в гнезде 102 для стыковки, которое открыто наружу так, что пылесборный контейнер 15 устанавливается на нем вставляемым образом. Когда пылесборный контейнер 15 установлен на установочном участке 181, стыковка пылесборного контейнера 15 со станцией 100 разгрузки может быть завершена.
[97] Хотя на чертежах это не показано, внутри установочного участка 181 может быть предусмотрен датчик для определения того, соединен ли пылесборный контейнер 15. Следовательно, когда пылесборный контейнер 15 установлен на установочном участке 181, станция 100 разгрузки может идентифицировать состояние стыковки пылесборного контейнера 15 со станцией 100 разгрузки с помощью выходного значения датчика 110.
[98] Внутри пылесборного контейнера 15 может быть расположен мультициклон 18. Пылесборный контейнер 15 может быть выполнен с возможностью сбора инородных веществ на нижней стороне 18а мультициклона 18. Пылесборный контейнер 15 включает в себя первый пылесборник 15a, который собирает относительно крупные инородные вещества, которые собираются в первую очередь, и второй пылесборник 15b, который собирает относительно небольшие инородные вещества, которые собираются мультициклоном 18.
[99] Как первый пылесборник 15a, так и второй пылесборник 15b могут быть выполнены с возможностью открытия наружу при открытии двери 19 пылесборного контейнера.
[100] Соответственно, когда дверь 19 пылесборного контейнера, расположенная под пылесборным контейнером 15, открыта, инородные вещества, собранные в пылесборном контейнере 15, могут легко выгружаться в установочный участок 181.
[101] С этой целью пылесборный контейнер 15 может включать в себя дверь 19 пылесборного контейнера, выполненную с возможностью открытия пылесборного контейнера 15 при соединении со станцией 100 разгрузки, и станция 100 разгрузки может включать в себя направляющую для открытия, выполненную с возможностью нажатия на одну сторону двери 19 пылесборного контейнера для открытия двери 19 пылесборного контейнера, когда пылесборный контейнер 15 соединяется со станцией 100 разгрузки.
[102] Направляющая для открытия может быть образована как часть внутренней периферийной поверхности установочного участка 181. Однако, раскрытие не ограничивается этим, и направляющая для открытия может быть предусмотрена в виде одного участка, выступающего от внутренней периферийной поверхности установочного участка 181 к центральной стороне, или может быть предусмотрена в виде выступа, ребра или тому подобного, выступающего от внутренней периферийной поверхности установочного участка 181 к центральной стороне. Однако, положение и тип направляющей для открытия не ограничены вышеприведенным примером, и направляющая для открытия может быть реализована в различных конструкциях без ограничений при условии, что она может открывать дверь 19 пылесборного контейнера при установке пылесборного контейнера 15.
[103] Следовательно, когда пылесборный контейнер 15 стыкуется с установочным участком 181, нажимная часть автоматически прижимается к направляющей для открытия, так что дверь 19 пылесборного контейнера может открываться в то же время, когда пылесборный контейнер 15 стыкуется со станцией 100 разгрузки.
[104] Канал 180 всасывающего потока может проходить через корпус 101 от гнезда 102 для разгрузки и затем соединяться с всасывающим устройством 150.
[105] Канал 180 всасывающего потока может переносить воздушный поток, создаваемый всасывающим устройством 150, в пылесборный контейнер 15. То есть всасывающий воздушный поток, создаваемый всасывающим устройством 150, переносится во внутреннюю часть пылесборного контейнера 15 по сборнику 190 и установочному участку 181 через канал 180 всасывающего потока, и за счет всасывающего воздушного потока инородные вещества внутри пылесборного контейнера 15 выгружаются из пылесборного контейнера 15 в установочный участок 181 в соответствии с воздушным потоком, и затем собираются в сборнике 190 через канал 180 всасывающего потока.
[106] Сборник 190 может включать в себя корпус 191 сборника. Корпус 191 сборника может образовывать внутреннее пространство. То есть корпус 191 сборника может соответствовать части канала 180 всасывающего потока, но он будет описан как отдельный компонент для удобства в описании.
[107] Сборник 190 может включать в себя крышку 192 сборника. Крышка 192 сборника может быть расположена на передней поверхности корпуса 191 сборника. Крышка 192 сборника может открывать или закрывать корпус 191 сборника, так что внутренняя часть сборника 190 открыта наружу в состоянии, в котором панель 104 отделена.
[108] Сборник 190 может включать в себя пылевой мешок 193, расположенный во внутреннем пространстве корпуса 191 сборника и собирающий инородные вещества, протекающие через канал 180 всасывающего потока.
[109] Пылевой мешок 193 образован из материала, который пропускает воздух, блокируя инородные вещества, так что в нем могут собираться инородные вещества, выводимые из пылесборного контейнера 15 в сборник 190.
[110] Пылевой мешок 193 может быть предусмотрен в канале 441 всасывающего потока, и пылевой мешок 193 может быть предусмотрен отдельно от сборника 190.
[111] Когда станция 100 разгрузки приведена в действие, и инородные вещества собраны в пылевом мешке 193, пользователь отделяет панель 104 и открывает крышку 192 сборника, отделяя пылевой мешок 193 от сборника 190, так что инородные вещества, собранные в станции 100 разгрузки, выгружаются.
[112] Всасывающее устройство 150 включает в себя всасывающий вентилятор 153, первый двигатель 151 для вращения всасывающего вентилятора 153 и корпус 106 всасывающего устройства, образующий внутреннее пространство, в котором расположен всасывающий вентилятор 153.
[113] Корпус 106 всасывающего устройства может включать в себя крышку 107 всасывающего устройства, которая расположена на корпусе 101, и открывает и закрывает внутреннюю часть всасывающего устройства 150. Крышка 107 всасывающего устройства может быть выполнена с возможностью выпуска воздуха, всасываемого всасывающим вентилятором 153.
[114] Всасывающий воздушный поток, образованный всасывающим вентилятором 153, может подаваться в сборник 190 через канал 180 всасывающего потока во внутреннем пространстве корпуса 106 всасывающего устройства, и затем в пылесборный контейнер 15.
[115] Как описано выше, всасывающее устройство 150 может подавать всасывающий воздушный поток в пылесборный контейнер 15 за счет вращения всасывающего вентилятора 153, и воздух, направляемый всасывающим вентилятором 153, может перемещаться из пылесборного контейнера 15 в сборник, в конечном итоге перемещаясь наружу станции 100 разгрузки.
[116] Станция 100 разгрузки может дополнительно включать в себя устройство 160 регулировки расхода, выполненное с возможностью выборочного изменения объема всасываемого воздушного потока, подаваемого в пылесборный контейнер 15 в соответствии с вариантом осуществления. Устройство 160 регулировки расхода может включать в себя клапан 163 канала потока, выполненный с возможностью открытия или закрытия канала 180 всасывающего потока, и второй двигатель 161, который передает питание клапану 163 канала потока.
[117] Устройство 160 регулировки расхода может быть расположено внутри корпуса 101. Устройство 160 регулировки расхода может быть расположено между сборником 190 и всасывающим устройством 150. Подробно, клапан 163 канала потока может быть расположен посередине соединительного канала потока (канала всасывающего потока) 180, соединяющего сборник 190 с всасывающим устройством 150 и обеспечивающего протекание воздуха в нем. Однако, раскрытие не ограничивается этим, и клапан 163 канала потока может быть предусмотрен расположенным посередине соединительного канала потока (канала всасывающего потока) 180, соединяющего сборник 190 и установочный участок 181.
[118] То есть клапан 163 канала потока может открывать и закрывать канал 180 всасывающего потока на основании мощности, подаваемой вторым двигателем 161. С этой целью клапан 163 канала потока 180 может быть предусмотрен в канале 180 всасывающего потока.
[119] Например, клапан 163 канала потока может включать в себя тело, предусмотренное в форме пластины и выполненное с возможностью возвратно-поступательного движения в одном направлении, и может быть выполнен с возможностью открытия и закрытия канала 180 всасывающего потока за счет возвратно-поступательного движения этого тела.
[120] Кроме того, клапан 163 канала потока может включать в себя цилиндрическую форму, выполненную с возможностью поворота вокруг центральной оси, тело, обеспечивающее цилиндрическую форму, и участки с прорезями, образованные путем разреза обеих сторон этого тела вокруг центральной стороны, и когда тело и участки с прорезями поворачиваются на центральной оси, канал 180 всасывающего потока открывается и закрывается.
[121] Однако, тип клапана 163 канала потока не ограничивается вышеприведенным примером, и величина 165 канала потока может быть реализована без ограничений при условии, что он может открывать и закрывать канал 180 всасывающего потока на основании мощности, передаваемой от второго двигателя 161.
[122] Выше были подробно описаны конструктивные характеристики устройства 1 очистки. Нижеследующее описание будет сделано относительно конфигурации управления нерегулярной подачей всасывающего воздушного потока в пылесборный контейнер 15, соединенный со станцией 100 разгрузки.
[123] Фиг.5 представляет собой блок-схему управления, показывающую станцию 100 разгрузки в соответствии с вариантом осуществления раскрытия.
[124] Обращаясь к фиг.5, станция 100 разгрузки в соответствии с вариантом осуществления включает в себя датчик 110 для определения того, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки, устройство 120 ввода для приема ввода от пользователя, датчик 130 определения положения для определения положения клапана 163 канала потока устройства 160 регулировки расхода, датчик 195 сборника для определения того, находится ли сборник 190 в заполненном состоянии, контроллер 140 для управления всасывающим устройством 150 и устройством 160 регулировки расхода для подачи неравномерного всасывающего воздушного потока в пылесборный контейнер 15, причем всасывающее устройство 150 включает в себя первый двигатель 151 и всасывающий вентилятор 153 и создает всасывающий воздушный поток, который должен подаваться в пылесборный контейнер 15, причем устройство 160 регулировки расхода включает в себя второй двигатель 161 и клапан 163 канала потока для открытия и закрытия канала 180 всасывающего потока и регулировки расхода всасывающего воздушного потока, который должен подаваться в пылесборный контейнер 15, устройство 170 отображения, на котором отображается рабочее состояние, и ультрафиолетовый облучатель 185 для облучения пылесборного контейнера 15 или сборника 190 ультрафиолетовыми лучами.
[125] Однако, некоторые компоненты станции 100 разгрузки, показанные на фиг.5, могут быть исключены в соответствии с вариантом осуществления, и станция 100 разгрузки может дополнительно включать в себя другие компоненты в дополнение к компонентам, показанным на фиг.5 (например, запоминающее устройство, в котором хранятся различные части информации, такое как флэш-память, оперативное запоминающее устройство (ОЗУ) и жесткий диск (HDD)).
[126] Датчик 110 в соответствии с вариантом осуществления может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки.
[127] С этой целью датчик 110 может быть расположен на одном конце канала 180 всасывающего потока, с которым соединен пылесборный контейнер 15, и вывод (выходной поток) для случая, в котором пылесборный контейнер 15 соединен со станцией 100 разгрузки, может отличаться от вывода для случая, в котором пылесборный контейнер 15 не соединен со станцией 100 разгрузки. В частности, пылесборный контейнер 15 может быть установлен на одном конце установочного участка 181.
[128] Например, датчик 110 может быть выполнен в виде инфракрасного датчика, пьезоэлектрического датчика и тому подобного, но не ограничивается этим. Датчик может быть выполнен по-разному без ограничений при условии, что он может изменять выходные значения в зависимости от того, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки.
[129] Устройство 120 ввода в соответствии с вариантом осуществления может принимать ввод от пользователя.
[130] С этой целью устройство 120 ввода может быть расположено на корпусе 101 станции 100 разгрузки и может быть реализовано с использованием механической кнопки, переключателя, ручки (регулятора), сенсорной панели и тому подобного.
[131] Например, устройство 120 ввода может быть предусмотрено на верхней стороне станции 100 разгрузки и может быть выполнено в виде кнопки или переключателя. Однако, местоположение и тип устройства 120 ввода не ограничены при условии, что оно может принимать пользовательский ввод.
[132] В частности, устройство 120 ввода может принимать от пользователя команду на действие и команду на прекращение операции удаления инородных веществ из пылесборного контейнера 15. Кроме того, устройство 120 ввода может принимать команды на действие для различных режимов, таких как режим всасывания, режим отображения или тому подобное, в соответствии с вариантом осуществления.
[133] Датчик 130 определения положения в соответствии с вариантом осуществления может определять положение устройства 160 регулировки расхода.
[134] Подробно, датчик 130 определения положения может определять, находится ли клапан 163 канала потока устройства 160 регулировки расхода в положении, в котором клапан 163 канала потока закрывает канал 180 всасывающего потока, или в положении, в котором клапан 163 канала потока закрывает канал 180 всасывающего потока.
[135] Например, датчик 130 определения положения может быть предусмотрен в виде микропереключателя, который нажимается в соответствии с перемещением клапана 163 канала потока, выдавая первое значение, когда клапан 163 канала потока закрывает канал 180 всасывающего потока, и выдавая второе значение, когда клапан 163 канала потока открывает канал 180 всасывающего потока.
[136] Однако датчик 130 определения положения не ограничивается вышеприведенным примером, и датчик 130 определения положения может быть предусмотрен в виде датчика положения двигателя, выполненного с возможностью измерения положения второго двигателя 161, который передает мощность клапану 163 канала потока, выдавая первое значение, когда клапан 163 канала потока закрывает канал 180 всасывающего потока, и выдавая второе значение, когда клапан 163 канала потока открывает канал 180 всасывающего потока. В этом случае датчик 130 определения положения может определять положение ротора, включенного во второй двигатель 161, и с этой целью может быть предусмотрен на поверхности, обращенной к вращающемуся валу второго двигателя 161. Например, датчик 130 определения положения может соответствовать датчику Холла, использующему эффект Холла, но не ограничивается этим, и датчик 130 определения положения может быть предусмотрен по-разному без ограничений при условии, что он может изменять выходной сигнал в соответствии с вращением двигателя.
[137] Контроллер 140 в соответствии с вариантом осуществления может управлять всасывающим устройством 150 таким образом, чтобы инородные вещества из пылесборного контейнера 15 выгружались в станцию 100 разгрузки, когда пылесборный контейнер 15 соединен со станцией 100 разгрузки.
[138] Подробно, контроллер 140 может определять, что соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании выходного значения датчика 110, и когда пылесборный контейнер 15 соединен со станцией 100 разгрузки, может управлять запуском работы первого двигателя 151.
[139] Однако, контроллер 140 может дополнительно учитывать команду на действие пользователя, введенную через устройство 120 ввода, в дополнение к выходному значению датчика 110, управляя инициированием операции только при наличии команды на действие от пользователя.
[140] В этом случае, когда первый двигатель 151 поддерживается включенным и тот же самый всасывающий воздушный поток подается в пылесборный контейнер 15, некоторые инородные вещества могут быть захвачены внутренними компонентами пылесборного контейнера 15 и могут не выгружаться наружу. Например, инородные вещества, такие как волосы, могут улавливаться внутренней конструкцией пылесборного контейнера 15 и, несмотря на всасывающий воздушный поток, могут оставаться внутри пылесборного контейнера 15 без отделения наружу пылесборного контейнера 15. То есть всасывающий воздушный поток, подаваемый во внутреннюю часть пылесборного контейнера 15, может быть образован только в одном и том же направлении. Соответственно, некоторые инородные вещества могут обладать сопротивление м в направлении, в котором образуется всасывающий воздушный поток, и таким образом могут не отделяться наружу пылесборного контейнера 15 под действием всасывающего воздушного потока. Таким образом, инородные вещества внутри пылесборного контейнера 15 не могут эффективно выгружаться.
[141] Станция 100 разгрузки в соответствии с вариантом осуществления, в то время как всасывающий воздушный поток подается в пылесборный контейнер 15 всасывающим вентилятором 153, а воздух из пылесборного контейнера 15 всасывается, обеспечивает возможность изменения всасывающего воздушного потока, тем самым изменяя расход воздуха внутри пылесборного контейнера 15 и варьируя воздушный поток внутри пылесборного контейнера 15.
[142] Контроллер 140 для того, чтобы создать неравномерный всасывающий воздушный поток в пылесборном контейнере 15, может управлять устройством 160 регулировки расхода, периодически открывая и закрывая канал 180 всасывающего потока во время работы всасывающего устройства 150 (т.е., когда первый двигатель 151 поддерживается включенным).
[143] В этом случае контроллер 140 может непрерывно подавать напряжение на первый двигатель 151 таким образом, чтобы всасывающее устройство 150 работало, и во время работы всасывающего устройства 150 контроллер 140 может непрерывно подавать напряжение даже на второй двигатель 161 устройства 160 регулировки расхода.
[144] При такой конфигурации всасывающее устройство 150 может непрерывно создавать всасывающий воздушный поток за счет всасывающего вентилятора 153, и устройство 160 регулировки расхода может периодически открывать и закрывать канал 180 всасывающего потока, так что расход всасывающего воздушного потока, образуемого всасывающим устройством 150, периодически изменяется.
[145] Поскольку направление воздушного потока мгновенно изменяется, некоторое инородное вещество, обладающее сопротивлением в конкретном направлении, может потерять сопротивление вследствие прохождения воздуха в другом направлении и таким образом может выбрасываться наружу пылесборного контейнера 15 вместе с воздушным потоком.
[146] В этом случае инородные вещества, отделенные и выгруженные из пылесборного контейнера 15, могут перемещаться вместе с воздухом с помощью всасывающего вентилятора 153 и затем собираться сборником 190, предусмотренным в канале 180 всасывающего потока.
[147] То есть контроллер 140 может обеспечивать возможность периодического открытия и закрытия канала 180 всасывающего потока устройством 160 регулировки расхода, так что воздушный поток внутри пылесборного контейнера 15 изменяется. При такой конфигурации инородные вещества из пылесборного контейнера 15 могут выгружаться более эффективно.
[148] Ниже будет подробно описан вариант осуществления, в котором канал 180 всасывающего потока периодически открывается и закрывается устройством 160 регулировки расхода во время непрерывной работы всасывающего устройства 150 (первого двигателя 151) для удаления инородных веществ из пылесборного контейнера 15.
[149] Кроме того, контроллер 140 в соответствии с вариантом осуществления для того, чтобы подавать в пылесборный контейнер 15 нерегулярный всасывающий воздушный поток, может регулировать по меньшей мере одно из времени приведения в действие или частоты вращения первого двигателя 151 при повторении включения/выключения первого двигателя 151 всасывающего устройства 150.
[150] То есть контроллер 140 может управлять первым двигателем 151 таким образом, чтобы первый двигатель 151 многократно включался и выключался.
[151] В этом случае контроллер 140 регулирует по меньшей мере одно из времени, в течение которого включен первый двигатель 151, или времени, в течение которого двигатель 150 выключен, всякий раз, когда первый двигатель 151 попеременно включается и выключается, тем самым регулируя время работы первого двигателя 151.
[152] Кроме того, контроллер 140 может регулировать длительность импульса напряжения источника питания, подаваемого на первый двигатель 151, всякий раз, когда первый двигатель 151 попеременно включается и выключается, тем самым регулируя частоту вращения первого двигателя 151.
[153] В этом случае всасывающий вентилятор 153 может обеспечивать всасывающий воздушный поток, имеющий разную мощность всасывания, всякий раз, когда первый двигатель 151 попеременно включается и выключается, в соответствии с изменением времени приведения в действие первого двигателя 151 или частоты вращения первого двигателя 151, и поскольку внутреннее давление пылесборного контейнера 15 изменяется вследствие неравномерного всасывающего воздушного потока, инородные вещества в пылесборном контейнере 15 могут плавно выгружаться из пылесборного контейнера 15.
[154] То есть, поскольку расход воздуха внутри пылесборного контейнера 15 изменяется, воздух распространяется во всех направлениях в пространстве внутри пылесборного контейнера 15, и, соответственно, воздушный поток внутри пылесборного контейнера 15 может изменяться в различных направлениях.
[155] Поскольку направление воздушного потока изменяется мгновенно, некоторое инородное вещество, обладавшее сопротивлением в конкретном направлении, может потерять сопротивление вследствие потока воздуха в другом направлении и может выбрасываться наружу пылесборного контейнера 15 вместе с воздушным потоком.
[156] В этом случае инородные вещества, отделенные от пылесборного контейнера 15 и выгруженные, могут перемещаться вместе с воздухом при приведении в действие всасывающего вентилятора 153 и собираться в сборнике 190, предусмотренном в канале 180 всасывающего потока.
[157] То есть контроллер 140 может повторять подачу и остановку всасывающего воздушного потока в направлении пылесборного контейнера 15 за счет управления включением-выключением первого двигателя 151 и изменяет время подачи или мощность всасывания во время подачи всасывающего воздушного потока, тем самым периодически изменяя воздушный поток внутри пылесборного контейнера 15. При такой конфигурации инородные вещества из пылесборного контейнера 15 могут выгружаться более эффективно.
[158] Кроме того, контроллер 140 в соответствии с вариантом осуществления может задавать разные длительности импульсов напряжения источника питания в пределах по меньшей мере одного из периодов времени, в котором включается и выключается первый двигатель 151, так что первый двигатель 151 вибрирует.
[159] То есть контроллер 140 задает длительности импульсов напряжения источника питания, которые отличаются друг от друга в течение времени включения, в котором первый двигатель 151 включается при подаче напряжения, и обеспечивает первый двигатель 151 заданными длительностями импульсов.
[160] Например, контроллер 140 может регулировать длительности импульсов напряжения источника питания таким образом, чтобы поочередно обеспечивалась первая длительность импульса и вторая длительность импульса, когда импульсы напряжения источника питания распространяются в по меньшей мере одном временном отрезке.
[161] В этом случае первый двигатель 151 может подвергаться воздействию быстрого изменения частоты вращения на основании разности длительностей импульсов между импульсами напряжения источника питания, и, соответственно, первый двигатель 151 может вибрировать.
[162] Вибрация первого двигателя 151 может передаваться корпусу станции 100 разгрузки и пылесборному контейнеру 15, соединенному со станцией 100 разгрузки. То есть пылесборный контейнер 15 может вибрировать в соответствии с вибрацией первого двигателя 151, и инородные вещества из пылесборного контейнера 15 могут более эффективно выгружаться в соответствии с вибрацией. Например, даже инородные вещества, которые не выгружены из пылесборного контейнера 15, несмотря на всасывающий воздушный поток, поскольку они улавливаются внутренними компонентами пылесборного контейнера 15, могут быть выгружены из пылесборного контейнера 15 в соответствии с вибрацией пылесборного контейнера 15 вместе со всасывающим воздушным потоком.
[163] Контроллер 140 в соответствии с вариантом осуществления может повторять управление включением/выключением первого двигателя 151, когда пылесборный контейнер 15 отделен от станции 100 разгрузки или введена команда на остановку, или при условии, что первый двигатель 151 не завершит заданное число операций включения (т.е. заданную продолжительность времени работы).
[164] Контроллер 140, когда пылесборный контейнер 15 соединен со станцией 100 разгрузки, и затем отделен от станции 100 разгрузки, может приводить в действие первый двигатель 151 в течение предварительно заданного времени, которое задано заранее для инородных веществ, остающихся в канале 180 всасывающего потока, для сбора сборником 190.
[165] Контроллер 140 в соответствии с вариантом осуществления может управлять клапаном 165 канала потока в дополнение к управлению первым двигателем 151 для периодического открытия и закрытия канала 180 всасывающего потока, в то время как всасывающий воздушный поток всасывающим вентилятором 153 подается в соответствии с приведением в действие первого двигателя 151.
[166] То есть контроллер 140 управляет вторым двигателем 161 таким образом, чтобы клапан 163 канала потока периодически открывал и закрывал канал 180 всасывающего потока для повторной подачи и остановки всасывающего воздушного потока в пылесборный контейнер 15, так что воздушный поток внутри пылесборного контейнера 15 периодически изменяется. Другими словами, клапан 163 канала потока может регулировать расход воздуха, перемещаемого всасывающим вентилятором 153, и полностью останавливать всасывающий воздушный поток, который может оставаться во время отключения, когда напряжение не подается на первый двигатель 151, тем самым более эффективно изменяя воздушный поток внутри пылесборного контейнера 15.
[167] В этом случае контроллер 140 может определять, открыт ли или закрыт канал 180 всасывающего потока клапаном 163 канала потока на основании выходного значения датчика 130 определения положения, и приводить в действие первый двигатель 151 на основании открытия или закрытия канала 180 всасывающего потока, так что шум и перегрузка первого двигателя 151 могут быть устранены.
[168] Подробно, контроллер 140 управляет первым двигателем 151 для включения, когда клапан 163 канала потока открывает канал 180 всасывающего потока, и управляет первым двигателем 151 для выключения, когда клапан 163 канала потока закрывает канал 180 всасывающего потока.
[169] То есть контроллер 140 управляет первым двигателем 151 и вторым двигателем 161 совместно друг с другом, тем самым более эффективно выполняя подачу и повторение всасывающего воздушного потока и предотвращая вызывание шума всасывающим вентилятором 153 вследствие вращения, когда канал 180 всасывающего потока закрыт, при снижении перегрузки первого двигателя 151.
[170] Контроллер 140 может управлять вторым двигателем 161 таким образом, что клапан 163 канала потока открывает и закрывает канал 180 всасывающего потока в предварительно заданном цикле, или может управлять вторым двигателем 161 для работы в соответствии с временем приведения в действие первого двигателя 151, которое изменяется всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[171] То есть, когда время включения, в течение которого напряжение подается на первый двигатель 151, или время выключения, в течение которого напряжение не подается на первый двигатель 151, изменяется, контроллер 140 может управлять вторым двигателем 161, задействуя клапан 163 канала потока в соответствии с измененным временем включения или выключения.
[172] Контроллер 140 в соответствии с вариантом осуществления может управлять клапаном 163 канала потока, закрывая канал 180 всасывающего потока, когда пылесборный контейнер 15 отделен от станции 100 разгрузки. То есть контроллер 140 может управлять вторым двигателем 161 таким образом, чтобы клапан 163 канала потока закрывал канал 180 всасывающего потока.
[173] В этом случае закрытие канала 180 всасывающего потока в соответствии с вариантом осуществления может быть выполнено после приведения в действие первого двигателя 150 в течение предварительно заданного времени, которое задается таким образом, чтобы инородные вещества, остающиеся в канале 180 всасывающего потока, собирались сборником 190.
[174] Ниже будет подробно описан вариант осуществления, в котором всасывающее устройство 150 (первый двигатель 151) повторяет операции включения и выключения для удаления инородных веществ из пылесборного контейнера 15.
[175] Контроллер 140 в соответствии с вариантом осуществления в ответ на получение команды на действие для режима всасывания через устройство 120 ввода может управлять всасывающим устройством 150 для осуществления работы путем непрерывной подачи напряжения на всасывающее устройство 150 и осуществления управления устройством 160 регулировки расхода для открытия канала 180 всасывающего потока таким образом, чтобы всасывающий вентилятор 153 непрерывно вращался без закрытия канала 180 всасывающего потока.
[176] Контроллер 140 в соответствии с вариантом осуществления может определять, находится ли сборник 190 в заполненном состоянии на основании выходного сигнала датчика 195 сборника, и когда сборник 190 находится в заполненном состоянии, контроллер 140 может управлять устройством 170 отображения для отображения степени наполнения сборника 190.
[177] Контроллер 140 в соответствии с вариантом осуществления может управлять ультрафиолетовым облучателем 185 для облучения пылесборного контейнера 15 или сборника 190 ультрафиолетовыми лучами.
[178] Подробно, контроллер 140 может управлять ультрафиолетовым облучателем 185 для ультрафиолетового облучения, когда всасывающее устройство 150 работает, удаляя инородные вещества из пылесборного контейнера 15, и может управлять ультрафиолетовым облучателем 185 для ультрафиолетового облучения на основании пользовательского ввода, введенного через устройство 120 ввода.
[179] Контроллер 140 в соответствии с вариантом осуществления в ответ на прием пользовательского ввода для режима отображения через устройство 120 ввода может управлять устройством 170 отображения для излучения света.
[180] Контроллер 140 может включать в себя по меньшей мере одно запоминающее устройство, в котором хранится программа для выполнения вышеописанных операций и операций, описанных ниже, и по меньшей мере один процессор для выполнения хранящейся программы. Когда запоминающее устройство и процессор предусмотрены во множественном числе, множество запоминающих устройств и множество процессоров могут быть интегрированы в одну микросхему или могут быть предусмотрены в физически отдельных местоположениях.
[181] Всасывающее устройство 150 в соответствии с вариантом осуществления может подавать всасывающий воздушный поток в пылесборный контейнер 15 и с этой целью может включать в себя всасывающий вентилятор 153 и первый двигатель 151 для передачи мощности всасывающему вентилятору 153.
[182] Первый двигатель 151 вращается в соответствии с напряжением питания, передавая вращательное усилие всасывающему вентилятору 153.
[183] Всасывающий вентилятор 153 вращается на основании мощности, подаваемой от первого двигателя 151, для перемещения воздуха из пылесборного контейнера 15 в станцию 100 разгрузки.
[184] С этой целью всасывающий вентилятор 155 может быть предусмотрен на другом конце канала 180 всасывающего потока, один конец которого соединен с пылесборным контейнером 15, и может быть механически соединен с первым двигателем 151 для приема мощности первого двигателя 151.
[185] Устройство 160 регулировки расхода в соответствии с вариантом осуществления может открывать и закрывать канал 180 всасывающего потока в заданном цикле при подаче напряжения. С этой целью устройство 160 регулировки расхода включает в себя клапан 163 канала потока, способный открывать и закрывать канал 180 всасывающего потока, и второй двигатель 161, который передает мощность клапану 163 канала потока.
[186] Второй двигатель 161 может передавать мощность клапану 163 канала потока для открытия и закрытия канала 180 всасывающего потока.
[187] Подробно, второй двигатель 161 под управлением контроллера 140 может передавать мощность клапану 163 канала потока в предварительно заданном цикле или может передавать мощность клапану 163 канала потока для соответствия времени приведения в действие первого двигателя 151, которое изменяется всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[188] Клапан 163 канала потока в соответствии с вариантом осуществления может открывать и закрывать канал 180 всасывающего потока на основании мощности, подаваемой вторым двигателем 161. С этой целью клапан 163 канала потока может быть предусмотрен в канале 180 всасывающего потока.
[189] Например, клапан 163 канала потока может включать в себя тело, выполненное в форме пластины и выполненное с возможностью возвратно-поступательного движения в одном направлении, и может открывать и закрывать канал 180 всасывающего потока за счет возвратно-поступательного движения этого тела.
[190] Кроме того, клапан 163 канала потока может включать в себя цилиндрическую форму, выполненную поворачиваемой вокруг центральной оси, тело, имеющее цилиндрическую форму, и участки с прорезями, образованные путем разреза обеих сторон корпуса относительно центральной оси, и клапан 163 канала потока может быть выполнен с возможностью открытия и закрытия канала 180 всасывающего потока, когда тело и участки с прорезями поворачиваются относительно центральной оси.
[191] Однако тип клапана 163 канала потока не ограничивается вышеприведенным примером, и величина 163 канала потока может быть реализована без ограничения при условии, что он может открывать и закрывать канал 180 всасывающего потока на основании мощности, передаваемой от второго двигателя 161.
[192] Устройство 170 отображения в соответствии с вариантом осуществления может отображать рабочее состояние станции 100 разгрузки.
[193] Например, устройство 170 отображения может соответствовать светодиодной (LED) панели для излучения света и может включать в себя передний дисплей, предусмотренный на передней поверхности станции 100 разгрузки, для излучения света наружу станции 100 разгрузки, и внутренний дисплей, предусмотренный на установочном участке 181, для излучения света в пылесборный контейнер 15 из внутренней части установочного участка 181.
[194] Устройство 170 отображения может соответствовать светодиодной панели, расположенной на установочном участке 181, и излучать свет в пылесборный контейнер 15 из внутренней части установочного участка 181.
[195] Однако, положение и тип устройства 170 отображения не ограничиваются этим при условии, что устройство 170 отображения может отображать рабочее состояние.
[196] Ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами.
[197] С этой целью ультрафиолетовый облучатель 185 может быть предусмотрен в виде ультрафиолетовой лампы, обеспеченной на установочном участке 181 и излучающей ультрафиолетовые лучи. В этом случае ультрафиолетовые лучи, излучаемые ультрафиолетовым облучателем 185, могут излучаться в пылесборный контейнер 15, соединенный со станцией 100 разгрузки, и излучаться в сборник 190 через канал 180 всасывающего потока.
[198] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя двигатель и может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами при механической регулировке угла облучения на основании вращающей силы двигателя.
[199] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя множество ультрафиолетовых ламп и может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами при регулировке интенсивности излучения каждой из множества ультрафиолетовых ламп в массиве для электронной регулировки угла облучения.
[200] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя ультрафиолетовую лампу, предусмотренную на установочном участке 181, для облучения пылесборного контейнера 15 ультрафиолетовыми лучами, и ультрафиолетовую лампу, предусмотренную на корпусе 191 сборника, для облучения сборника 190 ультрафиолетовыми лучами.
[201] Датчик 195 сборника в соответствии с вариантом осуществления может определять, находится ли сборник 190 в заполненном состоянии.
[202] Например, датчик 195 сборника может быть выполнен в виде датчика давления, и когда сборник 190 находится в заполненном состоянии и препятствует всасывающему воздушному потоку всасывающего устройства 150, датчик 195 сборника может определять давление, отличное от давления при нормальной работе. При такой конфигурации контроллер 140 может определять то, что сборник 190 находится в заполненном состоянии, когда датчик 195 сборника выдает давление, отличное от давления при нормальной работе.
[203] Однако, датчик 195 сборника не ограничивается вышеприведенным примером и может быть различным при условии, что он может определять степень наполнения сборника 190, например, оптическим датчиком или камерой.
[204] Выше были подробно описаны компоненты станции 100 разгрузки. Последующее описание будет сделано относительно подачи неравномерного всасывающего воздушного потока в пылесборный контейнер 15 таким образом, чтобы инородные вещества в пылесборном контейнере 15 эффективно выгружались.
[205] Во-первых, будет подробно описан вариант осуществления, в котором для подачи нерегулярного всасывающего воздушного потока в пылесборный контейнер 15 всасывающее устройство 150 управляется для непрерывной работы, а устройство 160 регулировки расхода управляется для периодического открытия и закрытия канала 180 всасывающего потока.
[206] Фиг.6 представляет собой вид, показывающий случай, в котором станция 100 разгрузки автоматически работает при соединении с пылесборным контейнером 15 в соответствии с вариантом осуществления раскрытия, фиг.7 представляет собой вид, показывающий случай, в котором станция 100 разгрузки работает в соответствии с вводом команды на действие в соответствии с вариантом осуществления раскрытия, фиг.8 представляет собой вид для описания момента времени, когда станция 100 разгрузки определяет закрытия канала 180 всасывающего потока в связи с частотой внешнего питания в соответствии с вариантом осуществления раскрытия, и фиг. 9 представляет собой вид для описания случая, в котором станция 100 разгрузки инициирует работу в соответствии с вариантом осуществления раскрытия.
[207] Обращаясь к фиг.6, контроллер 140 в соответствии с вариантом осуществления может быть выполнен, при соединении с пылесборным контейнером 15, с возможностью инициировать операцию удаления инородных веществ из пылесборного контейнера 15 путем подачи напряжения на всасывающее устройство 150 и устройство 160 регулировки расхода без приема отдельного пользовательского ввода.
[208] Подробно, контроллер 140 в ответ на определение того, что пылесборный контейнер 15 состыкован с установочным участком 181 станции 100 разгрузки, на основании выходного сигнала датчика 110 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для подачи напряжения для инициирования операции удаления инородных веществ из пылесборного контейнера 15.
[209] Кроме того, обращаясь к фиг.7, контроллер 140 в соответствии с вариантом осуществления может быть выполнен с возможностью, при получении команды на действие от пользователя через устройство 120 ввода в состоянии соединения с пылесборным контейнером 15, инициировать операцию удаления инородных веществ из пылесборного контейнера 15 путем подачи напряжения на всасывающее устройство 150 и устройство 160 регулировки расхода.
[210] Например, пользователь может вводить команду на действие путем нажатия кнопки, соответствующей устройству 120 ввода.
[211] Независимо от того, инициируется ли работа путем соединения пылесборного контейнера 15 или путем ввода команды на действие от пользователя, детали операции удаления инородного вещества из пылесборного контейнера 15 являются такими же, и далее операция удаления инородных веществ из пылесборного контейнера 15 будет описана со ссылкой на фиг.6 и 7.
[212] Контроллер 140, когда инициирование операции определено на основании соединения пылесборного контейнера 15 или пользовательского ввода команды на действие, может управлять всасывающим устройством 150 для осуществления работы по удалению пыли. То есть контроллер 140 может подавать напряжение на всасывающее устройство 150 для приведения в действие всасывающего вентилятора 153 для образования всасывающего воздушного потока.
[213] Кроме того, контроллер 140 может управлять устройством 160 регулировки расхода для периодического открытия и закрытия канала 180 всасывающего потока во время работы всасывающего устройства 150. То есть контроллер 140 может подавать напряжение на устройство 160 регулировки расхода для открытия и закрытия канала 180 всасывающего потока в предварительно заданном цикле.
[214] При такой конфигурации всасывающее устройство 150 может непрерывно создавать всасывающий воздушный поток за счет всасывающего вентилятора 153, и устройство 160 регулировки расхода может периодически открывать и закрывать канал 180 всасывающего потока, периодически изменяя расход всасывающего воздушного потока, создаваемого всасывающим устройством 150.
[215] Поскольку направление воздушного потока изменяется мгновенно, некоторое инородное вещество, обладавшее сопротивлением в конкретном направлении, может потерять сопротивление вследствие воздушного потока в другом направлении и может выбрасываться наружу пылесборного контейнера 15 вместе с воздушным потоком.
[216] В этом случае инородные вещества, отделенные от пылесборного контейнера 15 и выгруженные, могут перемещаться вместе с воздухом при приведении в действие всасывающего вентилятора 155 и собираться в сборнике 190, предусмотренном в канале 180 всасывающего потока.
[217] То есть контроллер 140 может изменять воздушный поток внутри пылесборного контейнера 15 путем обеспечения возможности периодического открытия или закрытия канала 180 всасывающего потока устройством 160 регулировки расхода. При такой конфигурации инородные вещества из пылесборного контейнера 15 могут выгружаться более эффективно.
[218] Контроллер 140 в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения операции выгрузки пыли, когда предварительно заданное время TO работы истекло после инициирования работы всасывающего устройства 150.
[219] То есть контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для осуществления работы в течение предварительно заданного времени TO работы по выгрузке инородных веществ из пылесборного контейнера 15, и когда заданное время TO работы истекло после инициирования операции, может прекращать подачу напряжения на всасывающее устройство 150 и устройство 160 регулировки расхода.
[220] В этом случае устройство 160 регулировки расхода может повторять открытие и закрытие канала 180 всасывающего потока предварительно заданное число раз (например, пять раз) в течение предварительно заданного времени TO работы. То есть предварительно заданное время TO работы может быть временем, заданным для повторения открытия и закрытия канала 180 всасывающего потока предварительно заданное число раз (например, пять раз) с учетом периода открытия и закрытия устройства 160 регулировки расхода.
[221] В этом случае контроллер 140 может задать время TO работы большим, поскольку частота внешнего питания становится ниже. Поскольку частота внешнего питания становится ниже, число оборотов в час второго двигателя 151, приводящего в действие устройство 160 регулировки расхода, может быть увеличено, и период открытия и закрытия устройства 160 регулировки расхода может быть увеличен. Следовательно, контроллер 140 может регулировать время TO работы таким образом, чтобы число раз, когда канал 180 всасывающего потока открывается и закрывается устройством 160 регулировки расхода, было постоянным, даже когда изменяется частота внешнего питания.
[222] Например, когда частота внешнего питания составляет 60 Герц (Гц), период открытия и закрытия устройства 160 регулировки расхода может соответствовать 3,3 секунды, и когда частота внешнего питания составляет 50 Гц, период открытия и закрытия устройства 160 регулировки расхода может соответствовать 3,9 секунды. Следовательно, контроллер 140 может обеспечивать возможность работы всасывающего устройства 150 и устройства 160 регулировки расхода в течение времени работы (например, двадцать одной секунды) при частоте внешнего питания 50 Гц, которое больше, чем время работы (например, восемнадцать секунд) при частоте внешнего питания 60 Гц.
[223] При такой конфигурации станция 100 разгрузки обеспечивает число раз, когда канал 180 всасывающего потока открывается и закрывается независимо от частоты внешнего питания, тем самым обеспечивая эффективность удаления инородных веществ из пылесборного контейнера 15.
[224] В этом случае контроллер 140 в соответствии с вариантом осуществления может задавать предварительно заданное время TО работы таким образом, чтобы устройство 160 регулировки расхода останавливалось в состоянии, в котором канал 180 всасывающего потока открыт, на основании периода открытия и закрытия устройства 160 регулировки расхода для канала 180 всасывающего потока.
[225] Контроллер 140 может прекратить подачу напряжения на всасывающее устройство 150 и устройство 160 регулировки расхода по истечении времени TO работы. Однако, даже при отсутствии напряжения источника питания на всасывающем устройстве 150 всасывающий вентилятор 153 может продолжать вращаться по инерции. При условии, что всасывающий вентилятор 153 не будет полностью остановлен после прекращения подачи напряжения на всасывающее устройство 150, всасывающий воздушный поток в канале 180 всасывающего потока может оставаться при уменьшении. Когда канал 180 всасывающего потока закрыт устройством 160 регулировки расхода в ситуации, когда давление воздуха изменяется вследствие изменения всасывающего воздушного потока, может создаваться шум вследствие мгновенного изменения давления воздуха.
[226] Контроллер 140 может задавать время TO работы таким образом, чтобы устройство 160 регулировки расхода останавливалось в состоянии открытия канала 180 всасывающего потока, когда время TO работы истекло после инициирования операции, так что закрытие всасывающего канала 180 предотвращается в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, так что шум предотвращается.
[227] Например, когда устройство 160 регулировки расхода инициирует работу в состоянии закрытого канала 180 всасывающего потока, контроллер 140 может определять время TO работы как нечетное кратное периоду открытия и закрытия устройства 160 регулировки расхода для канала 180 всасывающего потока с учетом периода открытия и закрытия.
[228] Контроллер 140 в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда предварительно заданное время TW ожидания (например, 2,5 секунды) истекло после времени TO работы.
[229] То есть контроллер 140 может обеспечивать возможность закрытия канала 180 всасывающего потока путем управления устройством 160 регулировки расхода по истечении времени TO работы, так что всасывающее устройство 150 защищено от инородных веществ, остающихся в канале 180 всасывающего потока, и при инициировании работы обеспечивать возможность включения всасывающего устройства 150 в состоянии открытого канала 180 всасывающего потока, так что шум уменьшается.
[230] Как описано выше, контроллер 140 управляет устройством 160 регулировки расхода для открытия канала 180 всасывающего потока в течение времени TW ожидания после времени TO работы, а затем закрытия канала 180 всасывающего потока.
[231] То есть контроллер 140 может предотвращать закрытие канала 180 всасывающего потока до того, как всасывающий вентилятор 153 будет полностью остановлен после прекращения подачи напряжения на всасывающее устройство 150, и может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда всасывающий вентилятор 153 полностью остановлен, когда время TW ожидания истекло после времени TO работы.
[232] Другими словами, контроллер 140 для того, чтобы предотвратить возникновение шума вследствие изменения всасывающего воздушного потока остаточной вращающей силой после прекращения операции удаления инородных веществ из пылесборного контейнера 15, может останавливать устройство 160 регулировки расхода таким образом, чтобы канал 180 всасывающего потока оставался открытым в течение заданного времени ожидания. Кроме того, контроллер 140 может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока после времени ожидания, так что всасывающее устройство 150 защищается от инородных веществ, остающихся в канале 180 всасывающего потока, и при инициировании операции удаления инородных веществ может обеспечивать работу всасывающего устройства 150 в ситуации, когда канал 180 всасывающего потока открыт, так что предотвращается возникновение шума.
[233] В этом случае контроллер 140 может регулировать момент времени определения канала 180 всасывающего потока в соответствии с частотой внешнего питания.
[234] Как описано выше, поскольку частота внешнего питания становится ниже, число оборотов второго двигателя 161 уменьшается, и период открытия и закрытия устройства 160 регулировки расхода для канала 180 всасывающего потока может быть увеличен.
[235] Соответственно, поскольку частота внешнего питания становится ниже, время закрытия канала 180 всасывающего потока может увеличиваться. Например, время закрытия при 60 Гц может составлять 0,8 секунды, а время закрытия при 50 Гц может составлять 1,05 секунды.
[236] Соответственно, при управлении устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока по истечении времени TW ожидания контроллер 140 может задерживать момент времени, в который канал 180 всасывающего потока определяется как закрытый, пропорционально уменьшению частоты внешнего питания.
[237] Например, обращаясь к фиг.8, контроллер 140, когда частота внешнего питания составляет 60 Гц, может определять канал 180 всасывающего потока как закрытый, когда время Ta1 (например, 0,1 секунды) истекло, поскольку датчик 130 определения положения выдает первое значение, указывающее на закрытие канала 180 всасывающего потока после времени TW ожидания. Кроме того, контроллер 140, как показано на фиг.8, когда частота внешнего питания составляет 50 Гц, может определять канал 180 всасывающего потока как закрытый, когда время Ta2 (например, 0,5 секунды) истекло, поскольку датчик 130 определения положения выдает первое значение, указывающее на закрытие канала 180 всасывающего потока после времени TW ожидания.
[238] То есть контроллер 140 может задерживать момент времени, в который канал 180 всасывающего потока определяется как закрытый после инициирования выдачи первого значения датчика 130 определения положения, поскольку время закрытия канала 180 всасывающего потока увеличивается, когда частота внешнего питания становится ниже.
[239] При такой конфигурации при новом инициировании операции удаления инородных веществ из пылесборного контейнера 15 всасывающее устройство 150 может инициировать операцию в ситуации, в котором канал 180 всасывающего потока открыт, независимо от частоты внешнего питания.
[240] То есть контроллер 140 может быть выполнен с возможностью, в ответ на уменьшение частоты внешнего питания, задержки момента времени, при котором канал 180 всасывающего потока определяется как закрытый после того, как первое значение начинает выдаваться датчиком 130 определения положения, так что время, необходимое для инициирования открытия канала 180 всасывающего потока устройством 160 регулировки расхода при инициировании новой операции, может быть постоянным независимо от частоты внешнего питания, и таким образом изменение шума, вызванного различными частотами внешнего питания, может быть уменьшено. Как показано на фиг.8, время Tb1, необходимое для открытия канала 180 всасывающего потока при частоте внешнего питания 60 Гц, может быть таким же или может незначительно отличаться от времени Tb2, необходимого для открытия канала 180 всасывающего потока при частоте внешнего питания 50 Гц.
[241] Другими словами, учитывая, что время закрытия канала 180 всасывающего потока при частоте 50 Гц внешнего питания больше, чем при частоте 60 Гц внешнего питания, контроллер 140 может задержать момент времени определения закрытия при частоте 50 Гц внешнего питания, который должен быть более поздним, чем при частоте 60 Гц внешнего питания, так что устройство 160 регулировки расхода дополнительно работает в течение времени задержки. При такой конфигурации время, остающееся до закрытия при частоте 60 Гц внешнего питания, может быть таким же или незначительно отличаться от времени при частоте 50 Гц внешнего питания, так что при инициировании новой операции изменение генерации шума незначительно.
[242] При подаче напряжения на всасывающее устройство 150 для инициирования работы контроллер 140 может постепенно увеличивать величину напряжения, подаваемого в течение времени плавного пуска, и с момента времени, когда время плавного пуска истекло, подавать напряжение, имеющее величину, соответствующую величине целевого (заданного) напряжения.
[243] То есть напряжение, подаваемое на всасывающее устройство 150, может постепенно увеличиваться в течение времени плавного пуска и достигать целевого напряжения, и затем может поддерживаться при целевом напряжении до тех пор, пока не будет достигнуто время TO работы.
[244] Это делается для предотвращения сильной вибрации первого двигателя 151, поскольку на него мгновенно подается высокое напряжение, и предотвращения вибрации станции 100 разгрузки вследствие сильной вибрации первого двигателя 151 при предотвращении возникновения шума вследствие вибрации станции 100 разгрузки.
[245] Во время плавного пуска, в течение которого напряжение, подаваемое на всасывающее устройство 150, увеличивается, расход всасывающего воздушного потока, создаваемого всасывающим устройством 150, может увеличиваться, и когда канал 180 всасывающего потока закрыт в ситуации, в которой расход всасывающего воздушного потока увеличивается, может создаваться шум вследствие внезапного изменения давления воздуха в канале 180 всасывающего потока.
[246] Контроллер 140 может управлять устройством 160 регулировки расхода для открытия канала 180 всасывающего потока во время плавного пуска, в течение которого напряжение, подаваемое на всасывающее устройство 150, увеличивается до целевого напряжения для предотвращения возникновения шума.
[247] Например, контроллер 140, как показано на фиг.6 и 7, может определять время TSS плавного пуска, соответствующее времени Tf1 открытия канала 180 потока с учетом периода Tf открытия и закрытия устройства 160 регулировки расхода для канала 180 всасывающего потока.
[248] То есть время TSS плавного пуска может быть определено как время от момента времени, когда начинается открытие канала 180 всасывающего потока, до момента времени, когда начинается закрытие канала 180 всасывающего потока, при непрерывной работе устройства 160 регулировки потока.
[249] Кроме того, контроллер 140 может определять время TSS плавного пуска независимо от периода Tf открытия и закрытия устройства 160 канала потока устройства 160 регулировки расхода. Например, контроллер 140 может задавать время TSS плавного пуска на большее, чем время Tf1 открытия канала 180 всасывающего потока в течении периода Tf открытия и закрытия устройства 160 регулировки потока для канала 180 всасывающего потока, так что вибрация станции 100 разгрузки может быть минимизирована.
[250] В этом случае контроллер 140, как показано на фиг.9, может останавливать устройство 160 регулировки расхода в течение времени Tf3, соответствующего разности между временем TSS плавного пуска и временем Tf1 открытия канала 180 всасывающего потока, так что канал 180 всасывающего потока открыт во время TSS плавного пуска.
[251] Кроме того, контроллер 140 в соответствии с вариантом осуществления при начале операции удаления инородных веществ из пылесборного контейнера 15 в состоянии, в котором канал 180 всасывающего потока открыт, может останавливать работу устройства 160 регулировки расхода в течение заданного времени, так что канал 180 всасывающего потока открыт во время TSS плавного пуска, и может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока после времени TSS плавного пуска.
[252] При такой конфигурации станция 100 разгрузки может предотвращать возникновение шума вследствие закрытия канала 180 всасывающего потока во время плавного пуска, в течение которого напряжение, подаваемое на всасывающее устройство 150, увеличивается.
[253] Вышеприведенное описание было сделано относительно варианта осуществления, в котором для подачи неравномерного всасывающего воздушного потока в пылесборный контейнер 15 всасывающее устройство 150 управляется для осуществления непрерывной работы, и устройство 160 регулировки расхода управляется для периодического открытия и закрытия канала 180 всасывающего потока. Далее будет подробно описан вариант осуществления, в котором команда на остановку принимается от пользователя во время непрерывной работы всасывающего устройства 150, и устройство 160 регулировки расхода периодически открывает и закрывает канал 180 всасывающего потока.
[254] Фиг. 10 представляет собой вид, показывающий случай, в котором станция 100 разгрузки прекращает работу в соответствии с вводом команды на остановку, причем канал всасывающего потока открыт в соответствии с вариантом осуществления раскрытия.
[255] Фиг.11 представляет собой вид, показывающий случай, в котором станция 100 разгрузки прекращает работу в соответствии с вводом команды на остановку, причем канал всасывающего потока закрыт в соответствии с вариантом осуществления раскрытия.
[256] Обращаясь к фиг.10 и 11, контроллер 140 в соответствии с вариантом осуществления, в ответ на получение ввода команды на прекращение операции выгрузки пыли через устройство 120 ввода, в то время как всасывающее устройство 150 и 160 работают на выгрузку пыли, может управлять 160 открытием канала 180 всасывающего потока и управлять всасывающим устройством 150 для прекращения работы после первого времени TW1 ожидания (например, одной секунды) с момента ввода команды на остановку.
[257] Как описано выше, даже когда подача напряжения на всасывающее устройство 150 прекращена, всасывающий вентилятор 153 может продолжать вращаться по инерции. До тех пор, пока всасывающий вентилятор 153 не будет полностью остановлен после прекращения подачи напряжения на всасывающее устройство 150, всасывающий поток воздуха в канале 180 всасывающего потока может оставаться уменьшающимся. В ситуации, когда давление воздуха изменяется вследствие изменения всасывающего воздушного потока, когда канал 180 всасывающего потока закрыт устройством 160 регулировки расхода, может возникать шум вследствие мгновенного изменения давления воздуха.
[258] Следовательно, контроллер 140, в ответ на получение команды на прекращение операции выгрузки пыли после инициирования операции выгрузки пыли, может управлять устройством 160 регулировки расхода для прекращения работы в состоянии, в котором канал 180 всасывающего потока открыт устройством 160 регулировки расхода, так что предотвращается закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, так что предотвращается возникновение шума.
[259] Подробно, контроллер 140 в соответствии с вариантом осуществления, как показано на фиг.10, при приеме ввода команды на прекращение операции выгрузки пыли в состоянии, в котором канал 180 всасывающего потока открыт, может прекратить работу устройства 160 регулировки расхода таким образом, чтобы канал 180 всасывающего потока оставался открытым.
[260] То есть контроллер 140 в ответ на прием ввода команды на остановку, когда устройство 160 регулировки расхода находится в положении открытия канала 180 всасывающего потока во время работы, может прекратить подачу напряжения на устройство 160 регулировки расхода для поддержания канал 180 всасывающего потока открытым.
[261] Контроллер 140 может прекратить подачу напряжения на всасывающее устройство 150 таким образом, что всасывающее устройство 150 прекращает работу, когда первое время TW1 ожидания истекло после момента времени, в котором введена команда на остановку.
[262] В этом случае контроллер 140, в соответствии с вариантом осуществления, может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда второе время TW2 ожидания (например, 2,5 секунды) истекло после времени, в которое введена команда на остановку.
[263] При такой конфигурации контроллер 140 может предотвращать закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, так что предотвращается возникновение шума.
[264] Обращаясь к фиг.11, контроллер 140 в соответствии с вариантом осуществления в ответ на получение ввода команды на прекращение операции выгрузки пыли в состоянии, в котором канал 180 всасывающего потока закрыт, может задействовать устройство 160 регулировки расхода для открытия канала 180 всасывающего потока.
[265] То есть контроллер 150, в ответ на прием ввода команды на остановку выгрузки пыли, когда устройство 160 регулировки расхода находится в положении закрытия канала 180 всасывающего потока во время работы, может поддерживать подачу напряжения на устройство 160 регулировки расхода в течение первого времени TW1 ожидания после ввода команды на остановку, так что всасывающий канал 180 потока открыт. В этом случае первое время TW1 ожидания может соответствовать времени, необходимому для перемещения устройства 160 регулировки расхода из положения, в котором канал 180 всасывающего потока закрыт, в положение, в котором канал 180 всасывающего потока открыт.
[266] Контроллер 140 может прекратить подачу напряжения на всасывающее устройство 150, так что всасывающее устройство 150 прекращает работу, когда первое время TW1 ожидания истекло после времени ввода команды на прекращение операции выгрузки пыли, и при этом подача напряжения на всасывающее устройство 150 прекращена, также прекратить подачу напряжения на устройство 160 регулировки расхода, так что всасывающее устройство 150 и устройство 160 регулировки расхода могут быть остановлены в состоянии, в котором канал 180 всасывающего потока открыт устройством 160 регулировки расхода.
[267] Как описано выше, контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы при счете первого времени TW1 ожидания и в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы при определении того, открывает ли устройство 160 регулировки расхода канал 180 всасывающего потока на основании выходного значения датчика 130 определения положения.
[268] То есть контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы в ответ на определение того, что канал 180 всасывающего потока открыт, на основании выходного значения датчика 130 определения положения после ввода команды на прекращение операции выгрузки пыли станции 100 разгрузки.
[269] В этом случае контроллер 140, в соответствии с вариантом осуществления, может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда второе время TW2 ожидания (например, 2,5 секунды) истекло после прекращения подачи напряжения на всасывающее устройство 150.
[270] При такой конфигурации контроллер 140 может предотвращать закрытие канала 180 всасывающего потока в ситуации, когда всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, тем самым предотвращая возникновение шума.
[271] Как описано выше, контроллер 140 завершает цикл путем окончательного закрытия канала 180 всасывающего потока после ввода команды на прекращение операции выгрузки пыли, так что всасывающее устройство 150 может быть предохранено от инородных веществ, остающихся в канале 180 всасывающего потока, и при новом инициировании операции удаления инородных веществ обеспечивает возможность работы всасывающего устройства 150 в состоянии открытого канала 180 всасывающего потока, так что может быть предотвращено возникновение шума.
[272] В вышеприведенном был описан вариант осуществления, в котором всасывающий воздушный поток, подаваемый в пылесборный контейнер 15, изменяется с помощью устройства 160 регулировки расхода в ситуации, в которой всасывающее устройство 150 работает непрерывно. Далее будет подробно описан вариант осуществления, в котором всасывающий воздушный поток, подаваемый в пылесборный контейнер 15, изменяется путем изменения двухпозиционного регулирования первого двигателя 151 всасывающего устройства 150.
[273] Фиг.12 представляет собой график, показывающий изменяющееся во времени управление включением-выключением первого двигателя 151 в соответствии с вариантом осуществления раскрытия, и фиг.13 представляет собой вид для описания случая, в котором обеспечена разная частота вращения всякий раз, когда повторяется операция включения первого двигателя 151 в соответствии с вариантом осуществления раскрытия.
[274] Обращаясь к фиг.12, станция 100 разгрузки в соответствии с вариантом осуществления может управлять всасывающим устройством 150 таким образом, чтобы инородные вещества из пылесборного контейнера 15 выгружались, когда пылесборный контейнер 15 пылесоса 10 соединен со станцией 100 разгрузки.
[275] Подробно, станция 100 разгрузки может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании выходного значения датчика 110, и когда пылесборный контейнер 15 соединен со станцией 100 разгрузки, инициировать управление первым двигателем 151.
[276] Однако, контроллер 140 может дополнительно учитывать команду пользовательского управления, введенную через устройство 120 ввода, в дополнение к выходному значению датчика 110, так что управление первым двигателем 151 инициируется только при наличии команды на действие от пользователя.
[277] В этом случае, когда первый двигатель 151 остается включенным, и тот же всасывающий воздушный поток подается в пылесборный контейнер 15, некоторые инородные вещества могут быть захвачены внутренними компонентами пылесборного контейнера 15 и могут не выгружаться наружу. Например, инородные вещества, такие как волосы, могут захватываться внутренней конструкцией пылесборного контейнера 15 и, несмотря на всасывающий воздушный поток, могут оставаться внутри пылесборного контейнера 15 без отделения наружу пылесборного контейнера 15. То есть всасывающий воздушный поток, подаваемый внутрь пылесборного контейнера 15, может образовываться только в одном и том же направлении. Соответственно, некоторые инородные вещества могут обладать сопротивлением в направлении, в котором образован всасывающий воздушный поток, и таким образом могут не отделяться наружу пылесборного контейнера 15 всасывающим воздушным потоком. Соответственно, инородные вещества внутри пылесборного контейнера 15 не могут эффективно выгружаться.
[278] Станция 100 разгрузки в соответствии с вариантом осуществления, в то время как всасывающий воздушный поток подается в пылесборный контейнер 15 всасывающим вентилятором 153, и воздух в пылесборном контейнере 15 всасывается, изменяет всасывающий воздушный поток таким образом, что расход воздуха внутри пылесборного контейнера 15 изменяется, и поток воздуха внутри пылесборного контейнера 15 изменяется.
[279] Контроллер 140 для того, чтобы подавать неравномерный всасывающий воздушный поток в пылесборный контейнер 15 может регулировать по меньшей мере одно из времени приведения в действие или частоты вращения первого двигателя 151 при повторении включения/выключения первого двигателя 151.
[280] То есть, как показано на фиг.12, контроллер 140 может управлять первым двигателем 151 таким образом, что первый двигатель 151 многократно включается и выключается.
[281] Подробно, контроллер 140 может управлять первым двигателем 151 таким образом, что первый двигатель 151 включается и затем выключается в каждом из множества временных отрезков.
[282] Например, обращаясь к фиг.12, первый двигатель 151 может повторять включение/выключение в соответствии с прохождением временных отрезков. В этом случае один временной отрезок может включать в себя время включения, в течение которого первый двигатель 151 включен при подаче номинального напряжения, и время выключения, в течение которого первый двигатель 151 выключен без подачи номинального напряжения, и для изменения частоты вращения в начале каждого временного отрезка время (время плавного пуска), прошедшее до тех пор, пока напряжение, подаваемое на первый двигатель 151, не повысится до номинального напряжения, может быть задано разным для каждого временного отрезка.
[283] В этом случае контроллер 140 регулирует по меньшей мере одно из времени, в течение которого включается первый двигатель 151, или времени, в течение которого выключается первый двигатель 151, всякий раз, когда первый двигатель 151 попеременно включается и выключается, то есть всякий раз, когда изменяется временной отрезок, так что время приведения в действие первого двигателя 151 регулируется.
[284] Например, время включения в первом временном отрезке может быть длиннее, чем время включения во втором временном отрезке, и время выключения в первом временном отрезке может быть короче, чем время выключения в третьем временном отрезке.
[285] Кроме того, контроллер 140 может регулировать длительность импульса напряжения источника питания, подаваемого на первый двигатель 151, всякий раз, когда первый двигатель 151 попеременно включается и выключается, для регулировки частоты вращения первого двигателя 151.
[286] Например, обращаясь к фиг.13, контроллер 140 может задавать длительность импульса напряжения источника питания, подаваемого на первый двигатель 151 в течение времени включения первого временного отрезка до 80%, и может задавать длительность импульса напряжения источника питания, подаваемого на первый двигатель 151, в течение времени включения второго временного отрезка с последующим первым временным отрезком до 65%. Соответственно, частота вращения первого двигателя 151 может быть уменьшена при прохождении от первого временного отрезка ко второму временному отрезку.
[287] В этом случае всасывающий вентилятор 153 может подавать в пылесборный контейнер 15 всасывающий воздушный поток разной мощности всасывания всякий раз, когда первый двигатель 151 попеременно включается и выключается, в соответствии с изменением времени приведения в действие первого двигателя 151 или частоты вращения первого двигателя 151, и поскольку внутреннее давление пылесборного контейнера 15 изменяется вследствие неравномерного всасывающего воздушного потока, инородные вещества в пылесборном контейнере 15 могут плавно выгружаться из пылесборного контейнера 15.
[288] То есть, когда расход воздуха внутри пылесборного контейнера 15 изменяется, воздух распространяется во всех направлениях во внутреннем пространстве пылесборного контейнера 15, и таким образом воздушный поток внутри пылесборного контейнера 15 может изменяться в различных направлениях.
[289] Поскольку направление воздушного потока изменяется мгновенно, некоторое инородное вещество, обладавшее сопротивлением в конкретном направлении, может потерять сопротивление вследствие потока воздуха в другом направлении и может выбрасываться наружу пылесборного контейнера 15 вместе с воздушным потоком.
[290] В этом случае инородные вещества, отделенные от пылесборного контейнера 15 и выгруженные, могут перемещаться вместе с воздухом при приведении в действие всасывающего вентилятора 153 и собираться в сборнике 190, предусмотренном в канале 180 всасывающего потока.
[291] То есть, контроллер 140 повторяет подачу и прерывание подачи всасывающего воздушного потока в пылесборный контейнер 15 с помощью управления включением-выключением первого двигателя 151 и изменяет время подачи или мощность всасывания при подаче всасывающего воздушного потока, тем самым периодически изменяя воздушный поток внутри пылесборного контейнера 15. При такой конфигурации инородные вещества из пылесборного контейнера 15 могут выгружаться более эффективно.
[292] Вышеприведенное описание было сделано при подачи нерегулярного всасывающего воздушного потока в пылесборный контейнер 15 за счет многократного включения и выключения первого двигателя 151 всасывающего устройства 150 таким образом, чтобы инородные вещества из пылесборного контейнера 15 эффективно выгружались. Далее будет подробно описана передача вибрации пылесборному контейнеру 15 таким образом, чтобы инородные вещества в пылесборном контейнере 15 эффективно выгружались.
[293] Фиг.14 представляет собой вид для описания случая, в котором первый двигатель 151 вибрирует для передачи вибрации пылесборному контейнеру 15 в соответствии с вариантом осуществления раскрытия.
[294] Обращаясь к фиг.14, контроллер 140 в соответствии с вариантом осуществления может задавать различную длительность импульсов для импульсов напряжения источника питания в пределах по меньшей мере одного из временных отрезков, в которых первый двигатель 150 включается и выключается, так что первый двигатель 151 вибрирует.
[295] То есть контроллер 140 задает длительности импульсов напряжения источника питания отличающимися друг от друга в пределах времени включения, в течение которого первый двигатель 151 включен при подаче напряжения, и обеспечивает первый двигатель 150 заданными длительностями импульсов.
[296] Например, обращаясь к фиг.14, контроллер 140 может регулировать длительности импульсов напряжения источника питания таким образом, чтобы первая длительность ① импульса и вторая длительность ② импульса обеспечивались попеременно при прохождении импульсов напряжения источника питания в третьем временном отрезке.
[297] В этом случае первый двигатель 151 может быть подвержен быстрому изменению частоты вращения на основании разности длительностей импульсов между импульсами напряжения источника питания, так что первый двигатель 151 может вибрировать.
[298] Вибрация первого двигателя 151 может передаваться корпусу станции 100 разгрузки и пылесборному контейнеру 15, соединенному со станцией 100 разгрузки. То есть пылесборный контейнер 15 может вибрировать в соответствии с вибрацией первого двигателя 151, и инородные вещества в пылесборном контейнере 15 могут более эффективно выгружаться в соответствии с вибрацией. Например, даже инородные вещества, которые не выбрасываются из пылесборного контейнера 15, несмотря на всасывающий воздушный поток, вследствие захвата внутренними компонентами пылесборного контейнера 15, могут быть выгружены из пылесборного контейнера 15 в соответствии с вибрацией пылесборного контейнера 15 вместе с всасывающим воздушным потоком.
[299] Как описано выше, станция 100 разгрузки в соответствии с вариантом осуществления повторяет подачу и прерывание подачи всасывающего воздушного потока в пылесборный контейнер 15 с помощью управления включением-выключением первого двигателя 151 и регулирует длительности импульсов во время подачи всасывающего воздушного потока в пределах одного и того же временного отрезка, чтобы вызвать вибрацию пылесборного контейнера 15, так что инородные вещества в пылесборном контейнере 15 могут выгружаться более эффективно.
[300] Контроллер 140 в соответствии с вариантом осуществления может повторять управление включением/выключением первого двигателя 151 до тех пор, пока пылесборный контейнер 15 не будет отделен от станции 100 разгрузки, или первый двигатель 151 не будет включен предварительно заданное число раз.
[301] Контроллер 140 в соответствии с вариантом осуществления может приводить в действие первый двигатель 151 в течение предварительно заданного времени, которое задано для сбора инородных веществ, остающихся в канале 180 всасывающего потока, сборником 190, когда пылесборный контейнер 15 соединяется со станцией 100 разгрузки, и затем отделяется от станции 100 разгрузки.
[302] В вышеприведенном была подробно описана передача вибрации пылесборному контейнеру 15, так что инородные вещества в пылесборном контейнере 15 эффективно выгружаются. Следующее описание будет сделано относительно управления вторым двигателем 161 для открытия и закрытия канала 180 всасывающего потока с помощью устройства 160 регулировки расхода в сочетании с управлением первым двигателем 151 для создания неравномерного всасывающего воздушного потока.
[303] Фиг.15 представляет собой вид для описания управления первым двигателем 151 в соответствии с работой клапана 163 канала потока в соответствии с вариантом осуществления раскрытия.
[304] Обращаясь к фиг. 15, контроллер 140 в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода в дополнение к управлению первым двигателем 151 для периодического открытия и закрытия канала 180 всасывающего потока, в то время как всасывающий воздушный поток подается всасывающим вентилятором 153 в соответствии с приведением в действие всасывающего устройства 150.
[305] То есть контроллер 140 управляет вторым двигателем 161 таким образом, что клапан 163 канала потока периодически открывает и закрывает канал 180 всасывающего потока для повторной подачи и прекращения подачи всасывающего воздушного потока в пылесборный контейнер 15, так что расход воздуха внутри пылесборного контейнера 15 периодически изменяется. Другими словами, клапан 163 канала потока может регулировать расход воздуха, перемещаемого всасывающим вентилятором 153, и полностью останавливать всасывающий воздушный поток, который может оставаться в течение времени отключения, в течение которого напряжение не подается на первый двигатель 151, тем самым более эффективно изменяя воздушный поток внутри пылесборного контейнера 15.
[306] В этом случае контроллер 140 определяет, открыт ли или закрыт канал 180 всасывающего потока клапаном 163 канала потока на основании выходного значения датчика 130 определения положения, и на основании того, открыт ли или закрыт канал 180 всасывающего потока, приводит в действие первый двигатель 151, так что могут быть снижены шум и перегрузка первого двигателя 151.
[307] Подробно, контроллер 140 управляет первым двигателем 151 для включения, когда устройство 160 регулировки расхода открывает канал 180 всасывающего потока, и управляет первым двигателем 151 для выключения, когда устройство 160 регулировки расхода закрывает канал 180 всасывающего потока.
[308] То есть контроллер 140 управляет первым двигателем 151 и вторым двигателем 161 в связи друг с другом, тем самым более эффективно выполняя подачу и повторение подачи всасывающего воздушного потока и предотвращая вызывание шума всасывающего вентилятора 153 вследствие вращения, когда канал 180 всасывающего потока закрыт, и уменьшая перегрузку первого двигателя 151.
[309] В этом случае контроллер 140 может управлять вторым двигателем 161 таким образом, чтобы клапан 163 канала потока открывал и закрывал канал 180 всасывающего потока в предварительно заданном цикле, и может управлять вторым двигателем 161 для соответствия времени приведения в действие первого двигателя 151, которое изменяется всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[310] То есть, когда время включения, в течение которого напряжение подается на первый двигатель 151, или время выключения, в течение которого напряжение не подается на первый двигатель 151, изменяется, контроллер 140 может управлять вторым двигателем 161, задействуя клапан 163 канала потока для соответствия с измененным временем включения и выключения.
[311] Контроллер 140 в соответствии с вариантом осуществления может управлять клапаном 163 канала потока для закрытия канала 180 всасывающего потока, когда пылесборный контейнер 15 отделен от станции 100 разгрузки. То есть контроллер 140 может управлять вторым двигателем 161 таким образом, чтобы клапан 163 канала потока закрывал канал 180 всасывающего потока.
[312] В этом случае закрытие канала 180 всасывающего потока может быть выполнено после приведения в действие первого двигателя 151 в течение заданного времени, которое задано заранее таким образом, чтобы инородные вещества, остающиеся в канале 180 всасывающего потока, собирались сборником 190.
[313] Далее будет подробно описан режим всасывания, в котором всасывающее устройство 150 непрерывно работает с открытым каналом 180 всасывающего потока.
[314] Фиг.16 представляет собой вид для описания случая, в котором станция 100 разгрузки выполняет режим всасывания в соответствии с вариантом осуществления раскрытия.
[315] Обращаясь к фиг.16, контроллер 140 в соответствии с вариантом осуществления, при приеме команды на действие для режима всасывания через устройство 120 ввода, может управлять всасывающим устройством 150 и устройством 160 регулировки расхода таким образом, чтобы всасывающий воздушный поток непрерывно подавался в состоянии, в котором канал 180 всасывающего потока открыт.
[316] Подробно, контроллер 140, в ответ на прием команды на действие для режима всасывания от пользователя в состоянии, в котором пылесборный контейнер 15 соединен со станцией 100 разгрузки, может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для выполнения режима всасывания.
[317] Контроллер 140 может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании вывода (выходного сигнала) датчика 110, и определять ввод режима всасывания на основании вывода устройства 120 ввода.
[318] Режим всасывания представляет собой режим для проверки всасывающей силы всасывающего устройства 150 и может относиться к циклу, в котором всасывающий воздушный поток непрерывно подается в состоянии, в котором канал 180 всасывающего потока открыт.
[319] Контроллер 140, в ответ на прием ввода режима всасывания, может управлять устройством 160 регулировки расхода для открытия канала 180 всасывающего потока.
[320] Подробно, обращаясь к фиг.16, контроллер 140 может подавать на устройство 160 регулировки расхода напряжение для открытия канала 180 всасывающего потока, когда канал 180 всасывающего потока закрыт, во время приема ввода режима всасывания, и может прекращать подачу напряжения на устройство 160 регулировки расхода, когда канал 180 всасывающего потока становится открытым.
[321] Кроме того, отличный от фиг.16, контроллер 140, когда канал 180 всасывающего потока открыт во время приема ввода режима всасывания, может управлять устройством 160 регулировки расхода для выключения таким образом, чтобы канал 180 всасывающего потока оставался открытым.
[322] Контроллер 140, в ответ на прием ввода режима всасывания, может управлять всасывающим устройством 150 для работы и может непрерывно подавать напряжение на первый двигатель 151.
[323] Обращаясь к фиг.16, контроллер 140 может выполнять режим всасывания до тех пор, пока пылесборный контейнер 15 не будет отделен от станции 100 разгрузки или не будет получен ввод команды на остановку. То есть контроллер 140 может управлять всасывающим устройством 150 для выключения, когда пылесборный контейнер 15 отделяется от станции 100 разгрузки или принята команда на остановку режима всасывания. Однако, контроллер 140 в соответствии с вариантом осуществления может управлять всасывающим устройством 150 для выполнения режима всасывания только в течение предварительно заданного времени работы и остановки по истечении предварительно заданного времени работы.
[324] Кроме того, контроллер 140 в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда заданное время ожидания истекло после завершения режима всасывания.
[325] То есть контроллер 140 может обеспечивать возможность закрытия канала 180 всасывающего потока путем управления устройством 160 регулировки расхода, когда истекло заданное время ожидания после прекращения подачи напряжения на всасывающее устройство 150, так что предотвращается закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, и таким образом предотвращается возникновение шума.
[326] Контроллер 140 в соответствии с вариантом осуществления завершает цикл путем окончательного закрытия канала 180 всасывающего потока после завершения режима всасывания, так что всасывающее устройство 150 может быть защищено от инородных веществ, остающихся в канале 180 всасывающего потока, и при новом инициировании операции удаления инородных веществ обеспечивает возможность работы всасывающего устройства 150 в состоянии открытого канала 180 всасывающего потока, так что может быть предотвращено возникновение шума.
[327] Ниже будет подробно описан режим отображения, в котором устройство 170 отображения непрерывно излучает свет.
[328] Фиг.17 представляет собой вид для описания случая, в котором станция 100 разгрузки выполняет режим отображения в соответствии с вариантом осуществления раскрытия.
[329] Обращаясь к фиг.17, контроллер 140 в соответствии с вариантом осуществления в соответствии с приемом ввода режима отображения через устройство 120 ввода, может выполнять режим отображения путем управления устройством 170 отображения для излучения света.
[330] Подробно, контроллер 140 в соответствии с приемом ввода режима отображения через устройство 120 ввода может управлять по меньшей мере одним из переднего дисплея 170a, предусмотренного на передней поверхности станции 100 разгрузки, для излучения света наружу станции 100 разгрузки или внутренним дисплеем 170b, предусмотренным на установочном участке 181, для излучения света изнутри установочного участка 181 в пылесборный контейнер 15.
[331] Контроллер 140 при выполнении режима отображения может управлять устройством 170 отображения для непрерывного излучения света независимо от работы всасывающего устройства 150 и может продолжать выполнять режим отображения до тех пор, пока внешний источник питания не будет отключен.
[332] Далее будет подробно описан вариант осуществления, в котором устройство 170 отображения отображает, выполняет ли сборник 190 сбор в соответствии с тем, находится ли сборник 190 в заполненном состоянии.
[333] Фиг.18 представляет собой вид для описания случая, в котором станция 100 разгрузки определяет степень наполнения сборника 190 в соответствии с вариантом осуществления раскрытия.
[334] Обращаясь к фиг.18, контроллер 140 в соответствии с вариантом осуществления может определять, находится ли сборник 190 в заполненном состоянии, на основании вывода датчика 195 сборника, и может управлять устройством 170 отображения для отображения степени наполнения сборника 190, когда сборник 190 находится в заполненном состоянии.
[335] Например, контроллер 140 может управлять передним дисплеем 170a для вывода «красного» света», когда сборник 190 находится в заполненном состоянии, и управлять передним дисплеем 170a для продолжения вывода «красного» света до тех пор, пока пылевой мешок 193 сборника 190 не будет заменен.
[336] Датчик 195 сборника в соответствии с вариантом осуществления может быть выполнен в виде датчика давления, расположенного в канале 180 всасывающего потока. Например, датчик 195 сборника может быть предусмотрен в корпусе 191 сборника, как показано на фиг.18. Однако, раскрытие этим не ограничивается, и датчик 195 сборника может быть расположен по-разному при условии, что он может измерять давление всасывающего воздушного потока. Например, датчик 195 сборника может быть расположен на корпусе 106 всасывающего устройства.
[337] В этом случае датчик 195 сборника может измерять давление, отличное от давления при нормальной работе, когда сборник 190 в заполненном состоянии препятствует всасывающему воздушному потоку всасывающего устройства 150.
[338] При такой конфигурации контроллер 140 может определять степень наполнения сборника 190, когда датчик 195 сборника выдает давление, отличное от давления при нормальной работе, и может управлять устройством 170 отображения для отображения степени наполнения сборника 190.
[339] Однако, датчик 195 сборника не ограничивается вышеприведенным примером и может быть выполнен в виде оптического датчика или камеры, предусмотренной в корпусе 191 сборника и способной определять степень наполнения сборника 190.
[340] Как описано выше, станция 100 разгрузки может уведомлять пользователя о ситуации, в которой инородные вещества в пылесборном контейнере 15 нормально не выгружаются вследствие степени наполнения сборника 190, и может уведомлять пользователя о необходимости замены пылевого мешка 193.
[341] Далее будет подробно описан вариант осуществления, в котором пылесборный контейнер 15 или сборник 190 стерилизуют путем облучения пылесборного контейнера 15 или сборника 190 ультрафиолетовыми лучами.
[342] Фиг.19 представляет собой вид для описания случая, в котором станция 100 разгрузки излучает ультрафиолетовые лучи в соответствии с вариантом осуществления раскрытия.
[343] Обращаясь к фиг.19, контроллер 140 в соответствии с вариантом осуществления может управлять ультрафиолетовым облучателем 185 для облучения пылесборного контейнера 15 или сборника 190 ультрафиолетовыми лучами для стерилизации.
[344] Ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами.
[345] С этой целью ультрафиолетовый облучатель 185 может быть выполнен в виде ультрафиолетовой лампы, которая предусмотрена на установочном участке 181 и излучает ультрафиолетовые лучи. В этом случае ультрафиолетовые лучи от ультрафиолетового облучателя 185 могут передаваться в пылесборный контейнер 15, соединенный со станцией 100 разгрузки, и могут передаваться в сборник 190 через канал 180 всасывающего потока.
[346] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя двигатель и может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами при механической регулировке угла облучения на основании вращающей силы двигателя.
[347] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя множество ультрафиолетовых ламп и может облучать пылесборный контейнер 15 или сборник 190 ультрафиолетовыми лучами при электронной регулировке угла облучения за счет регулировки интенсивности облучения каждой из множества ультрафиолетовых ламп в массиве.
[348] Кроме того, ультрафиолетовый облучатель 185 в соответствии с вариантом осуществления может включать в себя ультрафиолетовую лампу, предусмотренную на установочном участке 181, для переноса ультрафиолетовых лучей в пылесборный контейнер 15, и ультрафиолетовую лампу, предусмотренную на корпусе 191 сборника, для переноса ультрафиолетовых лучей в сборник 190.
[349] Контроллер 140 может управлять ультрафиолетовым облучателем 185 для ультрафиолетового облучения, когда всасывающее устройство 150 работает, удаляя инородные вещества из пылесборного контейнера 15 в соответствии с вариантом осуществления.
[350] Кроме того, контроллер 140 в соответствии с вариантом осуществления при приеме пользовательского ввода для ультрафиолетового облучения через устройство 120 ввода может управлять ультрафиолетовым облучателем 185 для облучения ультрафиолетовыми лучами в течение предварительно заданного времени.
[351] По существу, станция 100 разгрузки может стерилизовать пылесборный контейнер 15 и сборник 190 путем облучения пылесборного контейнера 15 и сборника 190 ультрафиолетовыми лучами.
[352] Далее будет описан вариант осуществления способа управления устройством 1 очистки в соответствии с аспектом. Устройство 1 очистки в соответствии с описанным выше вариантом осуществления может быть использовано для способа управления устройством 1 очистки. Следовательно, вышеприведенное описание, сделанное со ссылкой на фиг.1-19, может применяться к способу управления устройством 1 очистки.
[353] Фиг.20 представляет собой блок-схему последовательности операций способа управления устройством 1 очистки в соответствии с вариантом осуществления, которая показывает автоматическую работу при соединении с пылесборным контейнером 15 в соответствии с вариантом осуществления раскрытия.
[354] Обращаясь к фиг.20, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления при соединении с пылесборным контейнером (ДА при операции 2010) может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для осуществления работы по выгрузке пыли при операции 2020.
[355] То есть контроллер 140, в ответ на определение того, что пылесборный контейнер 15 состыкован с установочным участком 181 станции 100 разгрузки на основании вывода датчика 110, может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для подачи напряжения для инициирования операции удаления инородных веществ из пылесборного контейнера 15.
[356] Контроллер 140, когда инициирование операции определено на основании соединения пылесборного контейнера 15, может управлять всасывающим устройством 150 для осуществления работы. То есть контроллер 140 может подавать напряжение на всасывающее устройство 150 для приведения в действие всасывающего вентилятора 153 с образованием всасывающего воздушного потока.
[357] Кроме того, контроллер 140 может управлять устройством 160 регулировки расхода для периодического открытия и закрытия канала 180 всасывающего потока во время работы всасывающего устройства 150. То есть контроллер 140 может подавать напряжение на устройство 160 регулировки расхода для открытия и закрытия канала 180 всасывающего потока в предварительно заданном цикле.
[358] При такой конфигурации всасывающее устройство 150 может непрерывно создавать всасывающий воздушный поток с помощью всасывающего вентилятора 153, и устройство 160 регулировки расхода может периодически открывать и закрывать канал 180 всасывающего потока, тем самым периодически изменяя расход всасывающего воздушного потока, создаваемого всасывающим устройством 150.
[359] Поскольку направление воздушного потока изменяется мгновенно, некоторые инородные вещества, обладающие сопротивлением в конкретном направлении, могут потерять сопротивление вследствие потока воздуха в другом направлении и могут выбрасываться наружу пылесборного контейнер 15 вместе с воздушным потоком.
[360] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения операции выгрузки пыли, когда истекло предварительно заданное время TО работы (ДА при операции 2030) после инициирования работы всасывающего устройства 150 при операции 2040.
[361] То есть контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для работы в течение предварительно заданного времени TO для выгрузки инородных веществ из пылесборного контейнера 15, и когда заданное время TO истекло после инициирования операции, может прекращать подачу напряжения на всасывающее устройство 150 и устройство 160 регулировки расхода.
[362] В этом случае устройство 160 регулировки расхода может повторять открытие и закрытие всасывающего канала 180 предварительно заданное число раз (например, пять раз) в течение предварительно заданного времени TO работы. То есть предварительно заданное время TO работы может быть временем, заданным для повторения открытия и закрытия канала 180 всасывающего потока предварительно заданное число раз (например, пять раз) с учетом периода открытия и закрытия устройства 160 регулировки потока.
[363] В этом случае контроллер 140 в соответствии с вариантом осуществления может задавать предварительно заданное время TO работы таким образом, чтобы устройство 160 регулировки расхода прекращало работу в состоянии, в котором канал 180 всасывающего потока открыт, на основании периода открытия и закрытия устройства 160 регулировки расхода для канала 180 всасывающего потока.
[364] Контроллер 140 может задавать время TO работы таким образом, чтобы устройство 160 регулировки расхода прекращало работу в положении открытия всасывающего канала 180, когда время TO работы истекло после инициирования операции, так что предотвращается закрытие всасывающего канала 180 в состоянии, в котором всасывающий вентилятор 153 продолжает вращаться после прерывания подачи напряжения на всасывающее устройство 150, так что шум предотвращается.
[365] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда истекло предварительно заданное время TW ожидания (например, 2,5 секунды) (ДА при операции 2050) после времени TO работы при операции 2060.
[366] То есть контроллер 140 может обеспечивать прекращение работы устройства 160 регулировки расхода таким образом, чтобы канал 180 всасывающего потока был открыт в течение заданного времени ожидания для предотвращения возникновения шума вследствие изменения всасывающего воздушного потока, вызванного всасывающей силой, которая остается после прекращения операции удаления инородных веществ из пылесборного контейнера 15. Кроме того, контроллер 140 может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока по истечении времени ожидания, так что всасывающее устройство 150 защищено от инородных веществ, остающихся в канале 180 всасывающего потока, и при инициировании операции удаления инородных веществ обеспечивать работу всасывающего устройства 150 в состоянии открытого канала 180 всасывающего потока, так что шум снижается.
[367] Фиг.21 представляет собой блок-схему, показывающую способ управления устройством 1 очистки, которая показывает работу в ответ на ввод команды на действие в соответствии с вариантом осуществления раскрытия.
[368] Обращаясь к фиг.21, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления при соединении с пылесборным контейнером 15 (ДА при операции 2110), может быть выполнена с возможностью, в ответ на прием команды на действие (ДА при операции 2120), управлять всасывающим устройством 150 и устройством 160 регулировки расхода для осуществления работы по выгрузке пыли при операции 2130.
[369] После этого станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения операции выгрузки пыли, когда истекло предварительно заданное время TO работы (ДА при операции 2140) после инициирования работы всасывающего устройства 150 при операции 2150.
[370] Кроме того, контроллер 140 в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда истекло предварительно заданное время TW ожидания (например, 2,5 секунды) (ДА при операции 2160) после времени TO работы при операции 2170.
[371] Поскольку операции 2130-2170 соответствуют операциям 2030-2060 на фиг.20, подробные описания будут пропущены.
[372] Фиг.22 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает операцию остановки (прекращения) в ответ на ввод команды на остановку в соответствии с вариантом осуществления раскрытия.
[373] Обращаясь к фиг.22, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для осуществления работы по выгрузке пыли на основании соединения пылесборного контейнера 15 или ввода команды на действие пользователя при операции 2210.
[374] В этом случае контроллер 140 в соответствии с вариантом осуществления, когда введена команда на прекращение операции выгрузки пыли (ДА при операции 2220) и канал 180 всасывающего потока закрыт (ДА при операции 2230), может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения операции выгрузки пыли, когда канал 180 всасывающего потока становится открытым (ДА при операции 2240), поскольку первое время TW1 ожидания истекло после ввода команды на остановку при операции 2250.
[375] То есть контроллер 140 в соответствии с вариантом осуществления, в ответ на прием ввода команды на прекращение операции выгрузки пыли в состоянии, в котором канал 180 всасывающего потока закрыт, может задействовать устройство 160 регулировки расхода для открытия канала 180 всасывающего потока.
[376] Другими словами, контроллер 150 в ответ на прием ввода команды на остановку, когда устройство 160 регулировки расхода находится в положении закрытия канала 180 всасывающего потока во время работы, может поддерживать подачу напряжения на устройство 160 регулировки расхода в течение первого времени TW1 ожидания с момента времени, при котором введена команды на остановку, так что канал 180 всасывающего потока открывается. В этом случае первое время TW1 ожидания может соответствовать времени, необходимому для перемещения устройства 160 регулировки расхода из положения, в котором канал 180 всасывающего потока закрыт, в положение, в котором канал 180 всасывающего потока открыт.
[377] По существу, контроллер 140 может прекратить подачу напряжения на всасывающее устройство 150, так что всасывающее устройство 150 прекращает работу, когда первое время TW1 истекло после ввода команды на прекращение операции выгрузки пыли, и при прекращении подачи напряжения на всасывающее устройство 150 также прекращает подачу напряжения на устройство 160 регулировки расхода, так что всасывающее устройство 150 и устройство 160 регулировки расхода выключаются в состоянии, в котором устройство 160 регулировки расхода открывает канал 180 всасывающего потока.
[378] Как описано выше, контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы путем счета первого времени TW1 ожидания и также может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы путем определения того, открывает ли устройство 160 регулировки расхода канал 180 всасывающего потока на основании выходного значения датчика 130 определения положения.
[379] То есть контроллер 140 может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для прекращения работы в соответствии с определением того, что канал 180 всасывающего потока открыт на основании выходного значения датчика 130 определения положения после ввода команды на прекращение операции выгрузки пыли станции 100 разгрузки.
[380] При такой конфигурации контроллер 140 может предотвращать закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прерывания подачи напряжения на всасывающее устройство 150, тем самым предотвращая возникновение шума.
[381] Как описано выше, даже без подачи напряжения на всасывающее устройство 150 всасывающий вентилятор 153 может продолжать вращаться по инерции. До тех пор, пока всасывающий вентилятор 153 не будет полностью остановлен после прекращения подачи напряжения на всасывающее устройство 150, всасывающий воздушный поток в канале 180 всасывающего потока может оставаться при уменьшении. Когда канал 180 всасывающего потока закрыт устройством 160 регулировки расхода в ситуации, когда давление воздуха изменяется вследствие изменения всасывающего воздушного потока, может создаваться шум вследствие мгновенного изменения давления воздуха.
[382] Следовательно, контроллер 140 в ответ на прием команды на прекращение операции выгрузки пыли после инициирования операции выгрузки пыли может управлять устройством 160 регулировки расхода для прекращения операции в состоянии, в котором устройство 160 регулировки расхода открывает канал 180 всасывающего потока, так что предотвращается закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прерывания подачи напряжения на всасывающее устройство 150, так что предотвращается возникновение шума.
[383] Кроме того, контроллер 140 в соответствии с вариантом осуществления, когда введена команда на прекращение операции выгрузки пыли (ДА при операции 2220), и канал 180 всасывающего потока открыт (НЕТ при операции 2230), может управлять устройством 160 регулировки расхода для прекращения операции 2260. После этого станция 100 разгрузки устройства 1 очистки может управлять всасывающим устройством 150 для прекращения работы, когда истекло первое время TW1 ожидания (ДА при операции 2270) после ввода команды на остановку при операции 2280.
[384] То есть контроллер 140 в соответствии с вариантом осуществления, в ответ на прием ввода команды на прекращение (остановку) операции выгрузки пыли в состоянии, в котором канал 180 всасывающего потока открыт, может обеспечивать возможность прекращения работы устройства 160 регулировки потока таким образом, чтобы канал 180 всасывающего потока поддерживался открытым с помощью устройства 160 регулировки расхода.
[385] Другими словами, контроллер 140 в ответ на прием ввода команды на остановку, когда устройство 160 регулировки расхода находится в положении открытия канала 180 всасывающего потока во время работы, может прекращать подачу напряжения на устройство 160 регулировки расхода для поддержания канала 180 всасывающего потока открытым.
[386] При такой конфигурации контроллер 140 может предотвращать закрытие канала 180 всасывающего потока в ситуации, в которой всасывающий вентилятор 153 продолжает вращаться после прекращения подачи напряжения на всасывающее устройство 150, так что предотвращается возникновение шума.
[387] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда второе время TW2 ожидания (например, 2,5 секунды) истекло после остановки работы устройства 160 регулировки расхода при операции 2290.
[388] Как описано выше, контроллер 140 завершает цикл путем окончательного закрытия канала 180 всасывающего потока после ввода команды на прекращение операции выгрузки пыли, так что всасывающее устройство 150 защищено от инородных веществ, остающихся в канале 180 всасывающего потока, и при новом инициировании операции выгрузки инородных веществ обеспечивает возможность работы всасывающего устройства 150 в состоянии, в котором канал 180 всасывающего потока открыт, так что предотвращается возникновение шума.
[389] Фиг. 23 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает случай, в котором расход всасывающего воздушного потока регулируется путем управления первым двигателем 151 в соответствии с вариантом осуществления раскрытия.
[390] Обращаясь к фиг.23, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании выходного значения датчика 110 при операции 2310.
[391] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять первым двигателем 151 для включения и затем выключения, когда пылесборный контейнер 15 соединен со станцией 100 разгрузки (ДА в 2320).
[392] То есть контроллер 140 станции 100 разгрузки может управлять первым двигателем 151 таким образом, чтобы инородные вещества в пылесборном контейнере 15 выгружались, когда пылесборный контейнер 15 пылесоса 10 соединен со станцией 100 разгрузки.
[393] Подробно, контроллер 140 может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании выходного значения датчика 110, и когда пылесборный контейнер 15 соединен со станцией 100 разгрузки, инициировать выполнение управления первым двигателем 151.
[394] Однако, контроллер 140 может дополнительно учитывать команду управления пользовательского ввода через устройство 120 ввода в дополнение к выходному значению датчика 110 и инициировать выполнение управления первым двигателем 151 только при наличии команды от пользователя.
[395] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, в то время как всасывающий воздушный поток подается в пылесборный контейнер 15 всасывающим вентилятором 153 в соответствии с приведением в действие первого двигателя 151, и воздух в пылесборном контейнере 15 всасывается, обеспечивает возможность изменения всасывающего воздушного потока, тем самым изменяя расход воздуха внутри пылесборного контейнера 15 и варьируя поток воздуха внутри пылесборного контейнера 15.
[396] С этой целью станция 100 разгрузки устройства 1 очистки, когда пылесборный контейнер 15 не отделен (Нет при операции 2340), и число раз, когда первый двигатель 151 включается, не достигает предварительно заданного числа раз (НЕТ при операции 2350), может регулировать по меньшей мере одно из времени приведения в действие первого двигателя 151 или частоты вращения первого двигателя 151 при операции 2360. После этого станция 100 разгрузки устройства 1 очистки может управлять первым двигателем 151 таким образом, чтобы первый двигатель 151 включался и затем выключался на основании отрегулированного времени приведения в действие и/или отрегулированной частоты вращения при операции 2330.
[397] По существу, контроллер 140 для того, чтобы подавать неравномерный всасывающий воздушный поток в пылесборный контейнер 15, может регулировать по меньшей мере одно из времени приведения в действие или частоты вращения первого двигателя 151 при повторении включения/выключения первого двигателя 151.
[398] То есть контроллер 140 может управлять первым двигателем 151 таким образом, чтобы первый двигатель 151 попеременно включался и выключался.
[399] В этом случае контроллер 140 может регулировать время приведения в действие первого двигателя 151 путем регулировки по меньшей мере одного из времени, в течение которого включается первый двигатель 151, или время, в течение которого выключается первый двигатель 151, всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[400] Кроме того, контроллер 140 может регулировать частоту вращения первого двигателя 151 путем регулировки длительности импульса напряжения источника питания, подаваемого на первый двигатель 151 всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[401] В этом случае всасывающий вентилятор 153 может подавать всасывающий воздушный поток, имеющий различную мощность всасывания всякий раз, когда первый двигатель 151 попеременно включается и выключается в соответствии с изменением времени приведения в действие первого двигателя 151 или частоты вращения первого двигателя 151, и поскольку внутреннее давление пылесборного контейнера 15 изменяется вследствие неравномерного всасывающего воздушного потока, инородные вещества в пылесборном контейнере 15 могут плавно выгружаться из пылесборного контейнера 15.
[402] То есть, поскольку расход воздуха внутри пылесборного контейнера 15 изменяется, воздух распространяется во всех направлениях в пространстве внутри пылесборного контейнера 15, и, соответственно, воздушный поток внутри пылесборного контейнера 15 может изменяться в различных направлениях.
[403] Поскольку направление воздушного потока изменяется мгновенно, некоторые инородные вещества, обладавшие сопротивлением в конкретном направлении, могут потерять сопротивление вследствие воздушного потока в другом направлении и могут выбрасываться наружу пылесборного контейнера 15 вместе с воздушным потоком.
[404] То есть контроллер 140 повторяет подачу и прерывание подачи всасывающего воздушного потока в пылесборный контейнер 15 за счет управления включением-выключением первого двигателя 151 и изменяет время подачи или мощность всасывания при подаче всасывающего воздушного потока, тем самым периодически изменяя воздушный поток внутри пылесборного контейнера 15. При такой конфигурации инородные вещества из пылесборного контейнера 15 могут выгружаться более эффективно.
[405] В соответствии с вариантом осуществления контроллер 140 может задавать разную длительность импульсов для импульсов напряжения источника питания в пределах по меньшей мере одного из временных отрезков, в течение которого первый двигатель 151 попеременно включается и выключается, так что первый двигатель 151 вибрирует.
[406] В этом случае первый двигатель 151 может подвергаться быстрому изменению частоты вращения на основании разности длительностей импульсов между импульсами напряжения источника питания, и, соответственно, первый двигатель 151 может вибрировать.
[407] Вибрация первого двигателя 151 может передаваться корпусу станции 100 разгрузки и пылесборному контейнеру 15, соединенному со станцией 100 разгрузки. То есть пылесборный контейнер 15 может вибрировать в соответствии с вибрацией первого двигателя 151, и инородные вещества из пылесборного контейнера 15 могут более эффективно выгружаться в соответствии с вибрацией.
[408] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может повторять управление включением/выключением первого двигателя 151 до тех пор, пока пылесборный контейнер 15 не будет отделен от станции 100 разгрузки (ДА при операции 1040), или первый двигатель 151 не будет включен предварительно заданное число раз (ДА при операции 1050). В этом случае предварительно заданное число раз может быть задано на стадии проектирования устройства 1 очистки или может быть задано пользователем через устройство 120 ввода. Однако, раскрытие не ограничивается этим, и предварительно заданное число раз может быть задано контроллером 140 на основании информации о количестве инородных веществ, собранных в пылесборном контейнере 15, полученной датчиком или тому подобным.
[409] Контроллер 140 в соответствии с вариантом осуществления может приводить в действие первый двигатель 151 в течение предварительно заданного времени, которое задается для сбора инородных веществ, остающихся в канале 180 всасывающего потока, сборником 190, когда пылесборный контейнер 15 соединяется со станцией 100 разгрузки и затем отделяется от станции 100 разгрузки.
[410] Фиг. 24 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает случай, в котором первый двигатель 151 управляется в соответствии с работой клапана 163 канала потока в соответствии с вариантом осуществления раскрытия.
[411] Обращаясь к фиг.24, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании выходного значения датчика 110 при операции 2410.
[412] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, когда пылесборный контейнер 15 соединен со станцией 100 разгрузки (ДА при операции 2420), может управлять вторым двигателем 161 таким образом, чтобы клапан 163 канала потока периодически открывал и закрывал канал 180 всасывающего потока при операции 2430.
[413] Подробно, контроллер 140 в соответствии с вариантом осуществления может управлять клапаном 163 канала потока в дополнение к управлению первым двигателем 151 для периодического открытия и закрытия канала 180 всасывающего потока, в то время как всасывающий воздушный поток, создаваемый всасывающим вентилятором 153, подается в соответствии с приведением в действие первого двигателя 151.
[414] То есть контроллер 140 управляет вторым двигателем 161 таким образом, чтобы клапан 163 канала потока периодически открывал и закрывал канал 180 всасывающего потока, повторяя подачу и прекращение подачи всасывающего воздушного потока в пылесборный контейнер 15, так что воздушный поток внутри пылесборного контейнера 15 периодически изменяется. Другими словами, клапан 163 канала потока может регулировать расход воздуха, перемещаемого всасывающим вентилятором 153, и полностью останавливать всасывающий воздушный поток, который может оставаться во время отключения, в течение которого напряжение не подается на первый двигатель 151, тем самым более эффективно изменяя воздушный поток внутри пылесборного контейнера 15.
[415] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять включением/выключением первого двигателя 151 в ответ на открытие и закрытие канала 180 всасывающего потока при операции 2440.
[416] Другими словами, контроллер 140 станции 100 разгрузки определяет, открыт ли или закрыт канал 180 всасывающего потока клапаном 163 канала потока на основании выходного значения датчика 130 определения положения, и на основании того, открыт ли или закрыт канал 180 всасывающего потока, приводит в действие первый двигатель 151, так что шум и перегрузка первого двигателя 151 могут быть уменьшены.
[417] Подробно, контроллер 140 управляет первым двигателем 151 для включения, когда клапан 163 канала потока открывает канал 180 всасывающего потока, и управляет первым двигателем 151 для выключения, когда клапан 163 канала потока закрывает канал 180 всасывающего потока.
[418] То есть контроллер 140 управляет первым двигателем 151 и вторым двигателем 161 совместно друг с другом, тем самым более эффективно выполняя подачу и повторение подачи всасывающего воздушного потока и предотвращая вызывание шума всасывающим вентилятором 153 вследствие вращения, когда канал 180 всасывающего потока закрыт, и уменьшая перегрузку первого двигателя 151.
[419] В этом случае контроллер 140 может управлять вторым двигателем 161 таким образом, чтобы клапан 163 канала потока открывал и закрывал канал 180 всасывающего потока в предварительно заданном цикле, и может управлять вторым двигателем 161 для соответствия времени приведения в действие первого двигателя 151, которое изменяется всякий раз, когда первый двигатель 151 попеременно включается и выключается.
[420] То есть, когда время включения, в течение которого напряжение подается на первый двигатель 151, или время выключения, в течение которого напряжение не подается на первый двигатель 151, изменяется, контроллер 140 может управлять вторым двигателем 161 для осуществления работы клапана 163 канала потока в соответствии с измененным временем включения и временем выключения.
[421] Фиг. 25 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает выполнение режима всасывания в соответствии с вариантом осуществления раскрытия.
[422] Обращаясь к фиг.25, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления при соединении с пылесборным контейнером (ДА в режиме 2510) и приема команды для режима всасывания (ДА в режиме 2520), может управлять устройством 160 регулировки расхода, открывая канал 180 всасывающего потока при операции 2530, и управлять всасывающим устройством 150 для работы при операции 2540.
[423] То есть контроллер 140 в соответствии с вариантом осуществления в ответ на прием команды на действие для режима всасывания через устройство 120 ввода, может управлять всасывающим устройством 150 и устройством 160 регулировки расхода таким образом, чтобы всасывающий воздушный поток непрерывно подавался в состоянии, в котором канал 180 всасывающего потока открыт.
[424] Подробно, контроллер 140 в ответ на прием команды на действие для режима всасывания от пользователя в состоянии, в котором пылесборный контейнер 15 соединен со станцией 100 разгрузки, может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для выполнения режима всасывания.
[425] Контроллер 140 может определять, соединен ли пылесборный контейнер 15 со станцией 100 разгрузки на основании вывода датчика 110, и определять ввод режима всасывания на основании вывода устройства 120 ввода.
[426] Режим всасывания представляет собой режим для проверки всасывающей силы всасывающего устройства 150 и может относиться к циклу, в котором всасывающий воздушный поток непрерывно подается в состоянии, в котором канал 180 всасывающего потока открыт.
[427] Контроллер 140 в ответ на прием ввода режима всасывания может управлять устройством 160 регулировки расхода, открывая канал 180 всасывающего потока.
[428] Подробно, контроллер 140 может подавать напряжение на устройство 160 регулировки расхода для открытия канала 180 всасывающего потока, когда канал 180 всасывающего потока закрыт во время приема ввода режима всасывания, и может прекратить подачу напряжения на устройство 160 регулировки расхода, когда канал 180 всасывающего потока становится открытым.
[429] Кроме того, контроллер 140, когда канал 180 всасывающего потока открыт во время приема ввода режима всасывания, может управлять устройством 160 регулировки расхода для прекращения работы таким образом, чтобы канал 180 всасывающего потока оставался открытым.
[430] Контроллер 140 в ответ на прием ввода режима всасывания может управлять всасывающим устройством 150 для осуществления работы и может продолжать подачу напряжение на первый двигатель 151 всасывающего устройства 150.
[431] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, когда пылесборный контейнер отделен (ДА при операции 2550) или команда на остановку для режима всасывания принята через устройство 120 ввода (ДА при операции 2560), может управлять всасывающим устройством 150 для прекращения операции 2570.
[432] Таким образом, контроллер 140 может выполнять режим всасывания до тех пор, пока пылесборный контейнер 15 не будет отделен от станции 100 разгрузки или не будет получен ввод команды на остановку. То есть контроллер 140 может управлять всасывающим устройством 150 для прекращения работы, когда пылесборный контейнер 15 отделен от станции 100 разгрузки или принята команда на остановку режима всасывания. Однако, контроллер 140 в соответствии с вариантом осуществления может управлять всасывающим устройством 150 для выполнения режима всасывания только в течение предварительно заданного времени работы и остановки по истечении заданного времени работы.
[433] Кроме того, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять устройством 160 регулировки расхода для закрытия канала 180 всасывающего потока, когда заданное время ожидания истекло после завершения режима всасывания.
[434] Фиг.26 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает выполнение режима отображения в соответствии с вариантом осуществления раскрытия.
[435] Обращаясь к фиг.26, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, в ответ на прием ввода режима отображения при операции 2610, может управлять устройством 170 отображения для излучения света при операции 2620 и завершать режим отображения, когда внешнее питание прерывается (ДА при операции 2630).
[436] Подробно, контроллер 140 в ответ на прием ввода режима отображения через устройство 120 ввода может управлять по меньшей мере одним из переднего дисплея 170a, предусмотренного на передней поверхности станции 100 разгрузки, для излучения света наружу станции 100 разгрузки, или внутреннего дисплея 170b, предусмотренного на установочном участке 181, для излучения света изнутри установочного участка 181 в пылесборный контейнер 15.
[437] Контроллер 140 при выполнении режима отображения может управлять устройством 170 отображения для непрерывного излучения света независимо от работы всасывающего устройства 150 и может продолжать выполнять режим отображения до тех пор, пока внешний источник питания не будет отключен.
[438] Фиг. 27 представляет собой блок-схему последовательности операций, показывающую способ управления устройством 1 очистки, которая показывает отображение степени наполнения сборника 190 в соответствии с вариантом осуществления раскрытия.
[439] Обращаясь к фиг.27, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления может управлять всасывающим устройством 150 и устройством 160 регулировки расхода для осуществления работы по выгрузке пыли на основании соединения пылесборного контейнера 15 или ввода команды на действие от пользователя при операции 2710.
[440] Станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, когда сборник 190 находится в заполненном состоянии (ДА при операции 2720), может управлять устройством 170 отображения для отображения степени наполнения сборника 190 при операции 2730.
[441] Кроме того, станция 100 разгрузки устройства 1 очистки в соответствии с вариантом осуществления, когда всасывающее устройство 150 и 60 вновь выполняют операцию выгрузки пыли (ДА при операции 2740), может повторно определять, находится ли сборник 190 в заполненном состоянии, и когда сборник не находится в заполненном состоянии (ДА при операции 2750), управлять устройством 170 отображения, чтобы не отображать, находится ли сборник 190 в заполненном состоянии при операции 2760.
[442] Например, контроллер 140 может управлять передним дисплеем 170a для вывода «красного» света, когда сборник 190 находится в заполненном состоянии, и управлять передним дисплеем 170a для продолжения вывода «красного» света до тех пор, пока пылевой мешок 193 сборника 190 не будет заменен.
[443] По существу, станция 100 разгрузки может уведомлять пользователя о ситуации, в которой инородные вещества в пылесборном контейнере 15 нормально не выгружаются вследствие наполненности сборника 190, и может уведомлять пользователя о необходимости замены пылевого мешка 193.
[444] При этом раскрытые варианты осуществления могут быть воплощены в виде носителя записи, хранящего инструкции, выполняемые компьютером. Инструкции могут храниться в виде программного кода и при выполнении процессором могут генерировать программный модуль, выполняющий операции по раскрытым вариантам осуществления. Носитель записи может быть воплощен в виде машиночитаемого носителя записи.
[445] Машиночитаемый носитель записи включает в себя все виды носителей записи, на которых хранятся инструкции, которые могут быть декодированы компьютером, например, постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), магнитная лента, магнитный диск, флэш-память, оптическое устройство хранения данных и тому подобное.
[446] Как очевидно из вышесказанного, устройство очистки в соответствии с вариантом осуществления обеспечивает возможность автоматического и эффективного удаления инородных веществ из пылесборного контейнера пылесоса за счет обеспечения неравномерного всасывающего воздушного потока, когда пылесос состыкован со станцией разгрузки.
[447] Хотя раскрытие было показано и описано со ссылкой на различные варианты его осуществления, специалистам в данной области техники будет понятно, что в них могут быть выполнены различные изменения в форме и деталях без отступления от сущности и объема раскрытия, которые определены прилагаемой формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ, ИМЕЮЩЕЕ ПЫЛЕСОС И ЗАГРУЗОЧНУЮ СТАНЦИЮ | 2019 |
|
RU2782003C1 |
| ПЫЛЕСОС | 2016 |
|
RU2639243C1 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ | 2022 |
|
RU2822055C2 |
| ПЫЛЕСБОРНОЕ УСТРОЙСТВО ПЫЛЕСОСА (ВАРИАНТЫ) | 2005 |
|
RU2314741C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ | 2022 |
|
RU2831273C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ (ВАРИАНТЫ) | 2022 |
|
RU2829096C2 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ | 2022 |
|
RU2802296C1 |
| КАРТРИДЖ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ, СОДЕРЖАЩЕЕ ТАКОЙ КАРТРИДЖ | 2022 |
|
RU2830108C2 |
| ПЫЛЕСБОРНОЕ УСТРОЙСТВО ДЛЯ ПЫЛЕСОСА (ВАРИАНТЫ) | 2005 |
|
RU2304916C1 |
| ПЫЛЕСБОРНОЕ УСТРОЙСТВО ПЫЛЕСОСА (ВАРИАНТЫ) | 2005 |
|
RU2314011C2 |
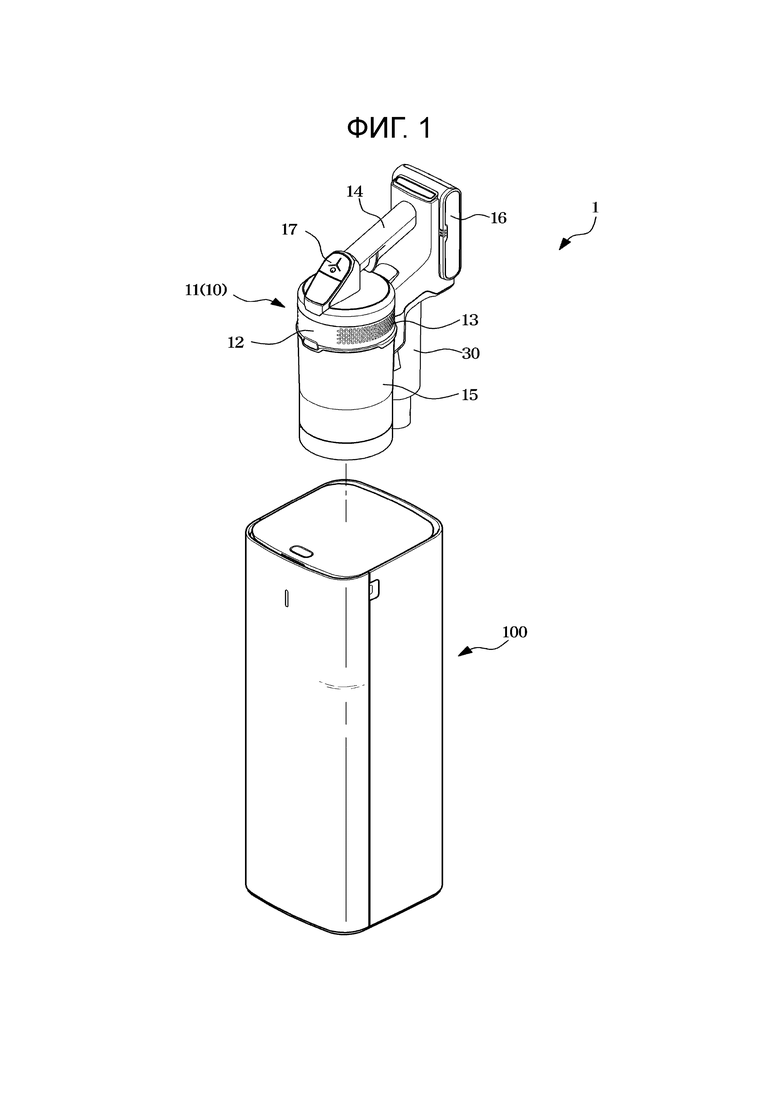
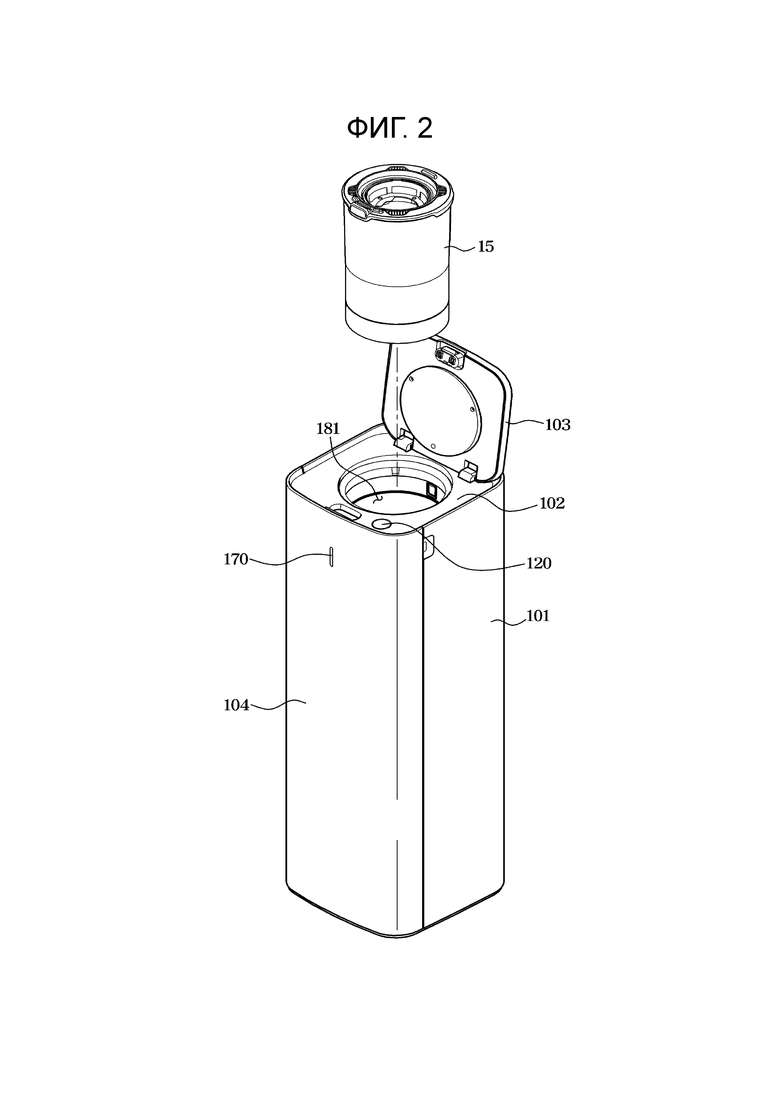
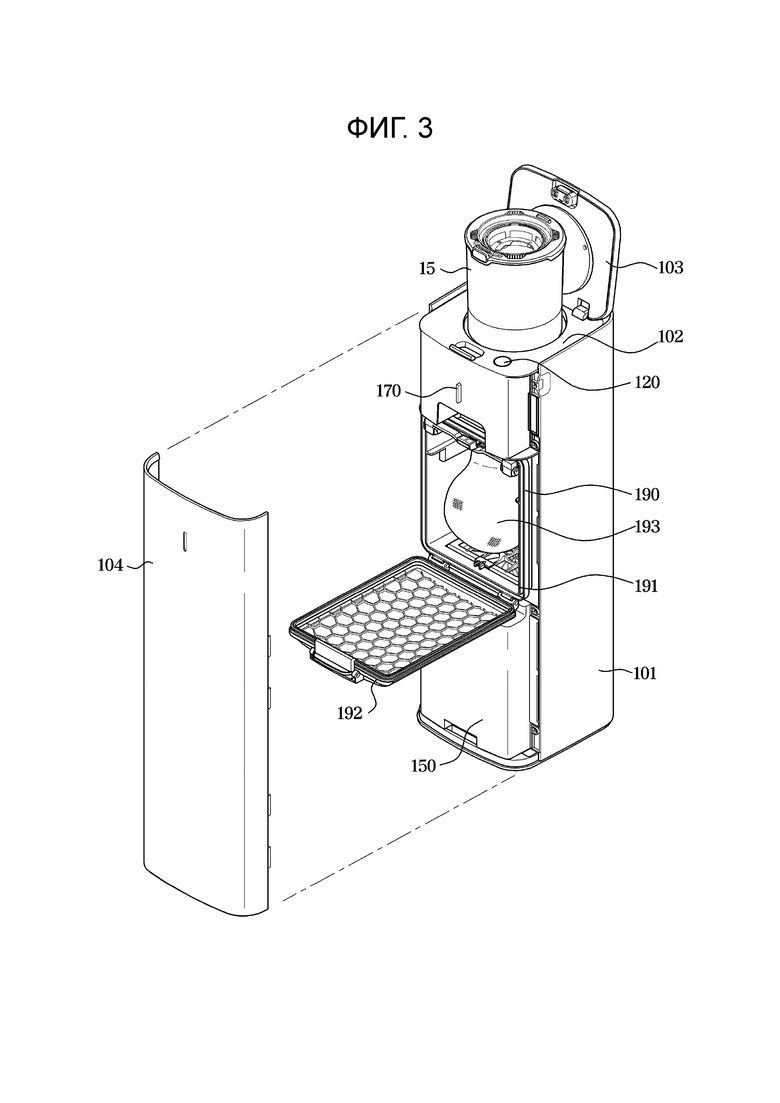
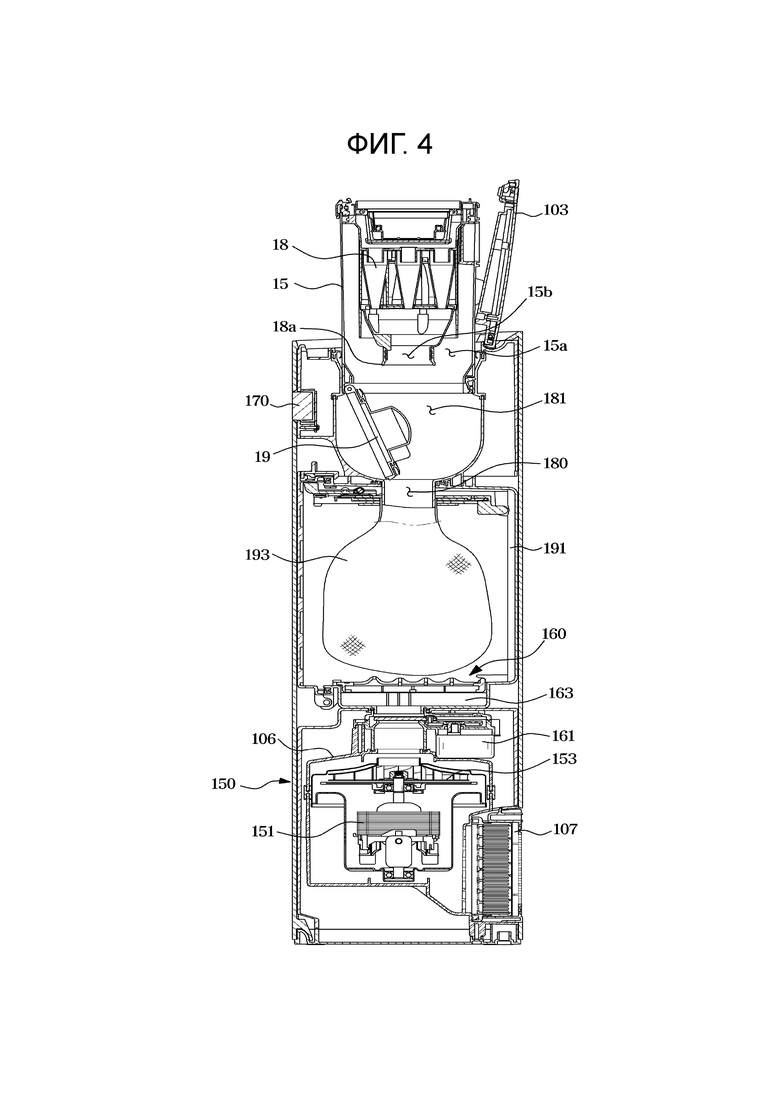
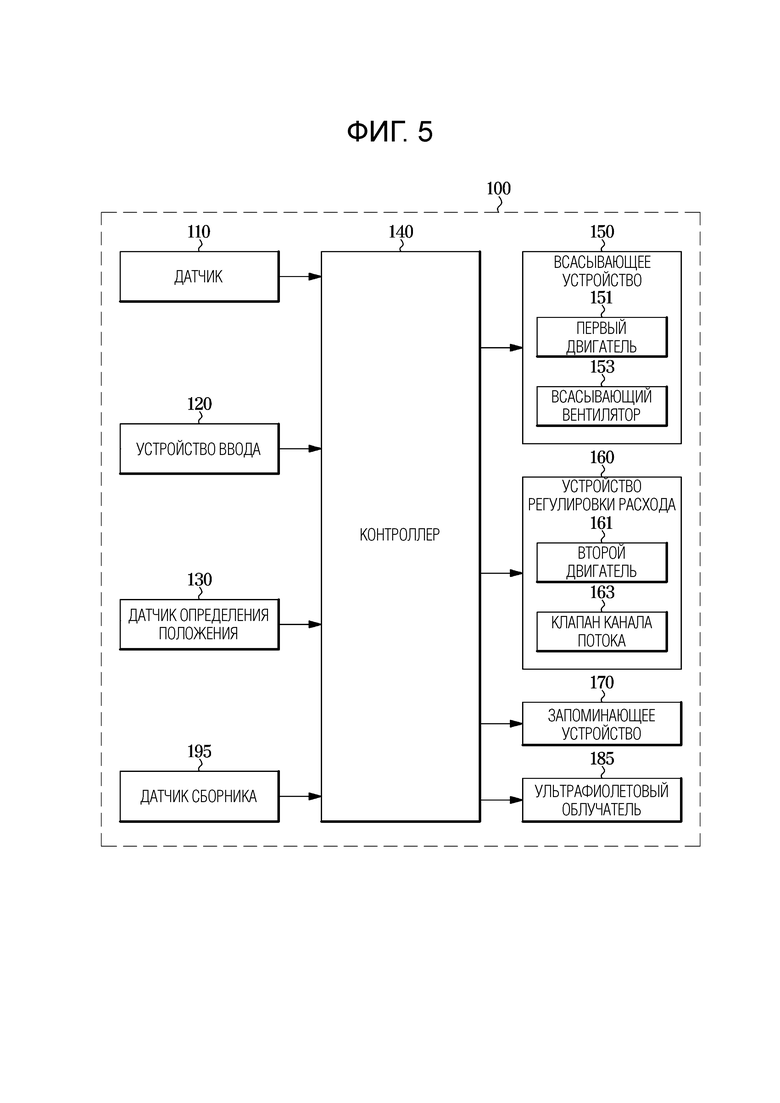
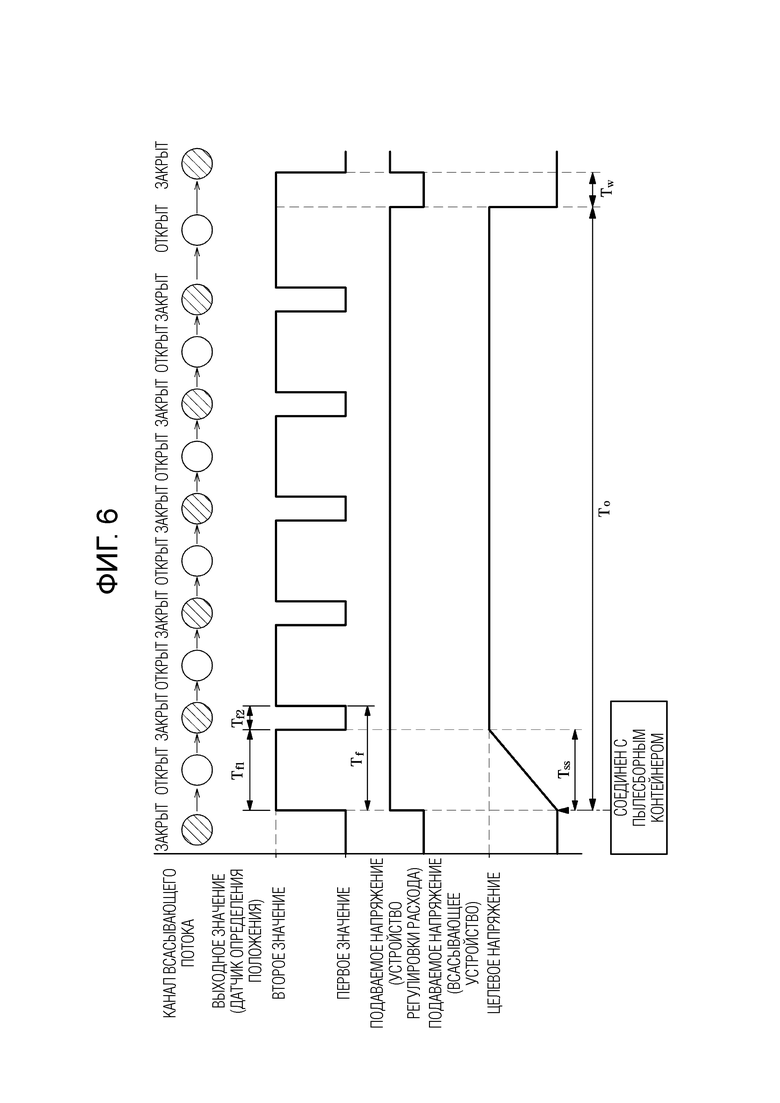
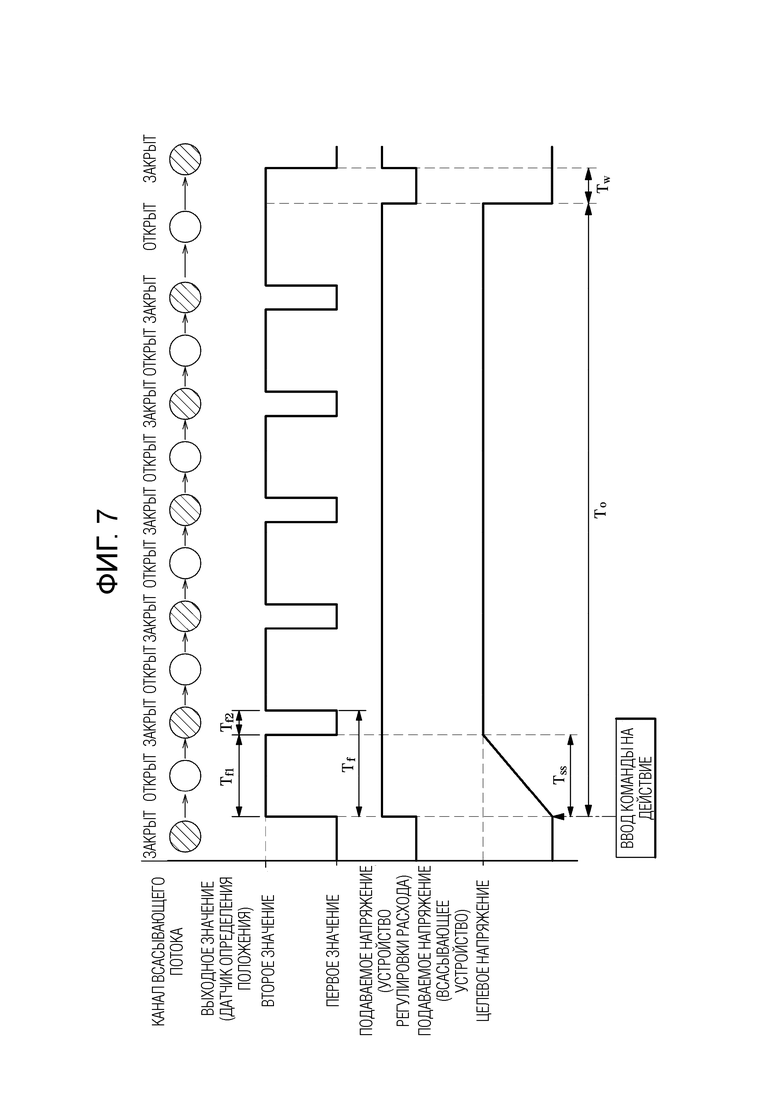
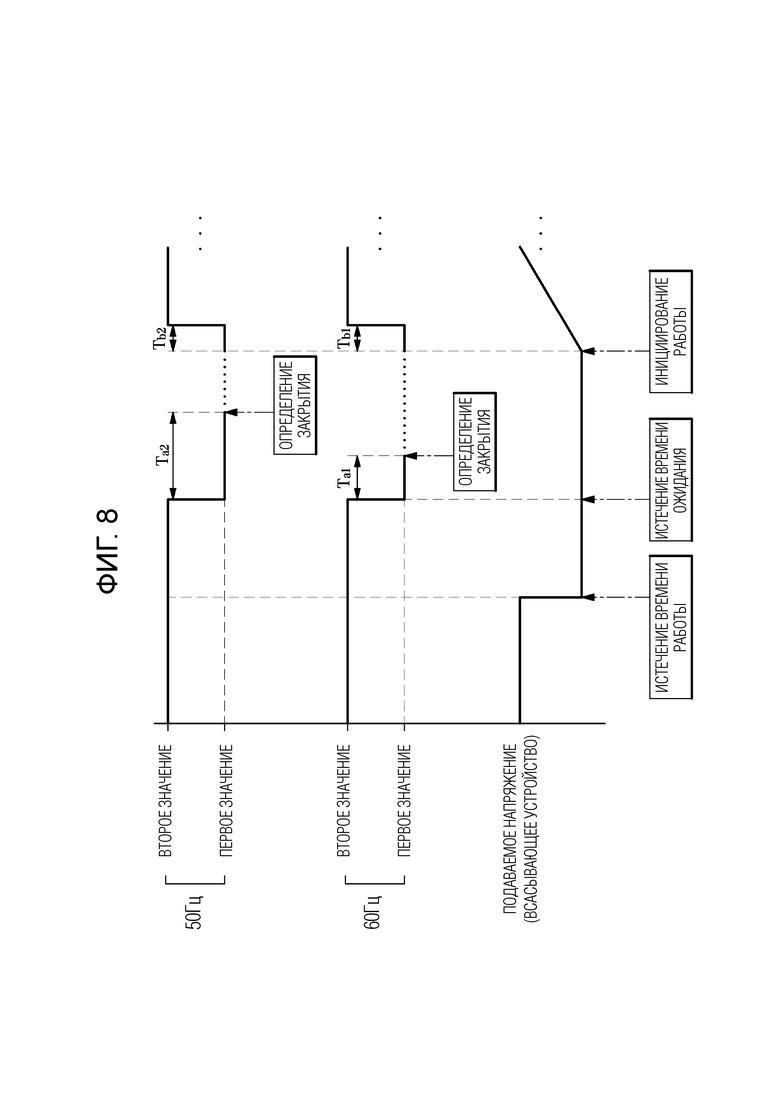
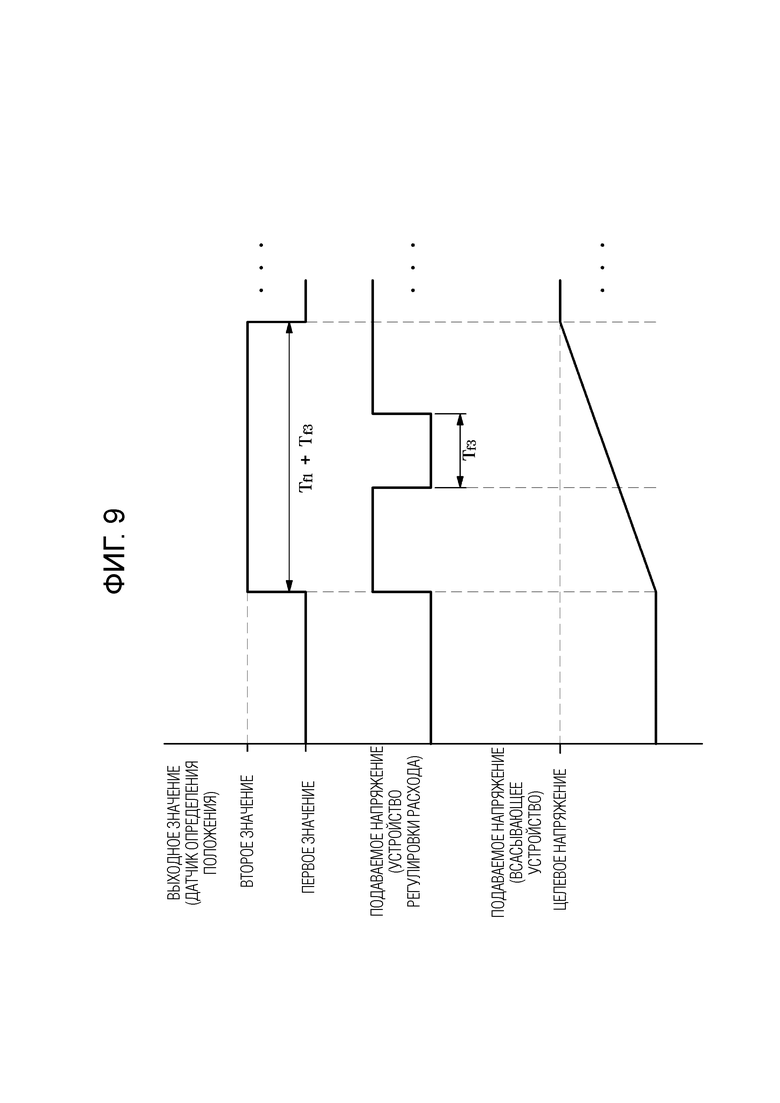
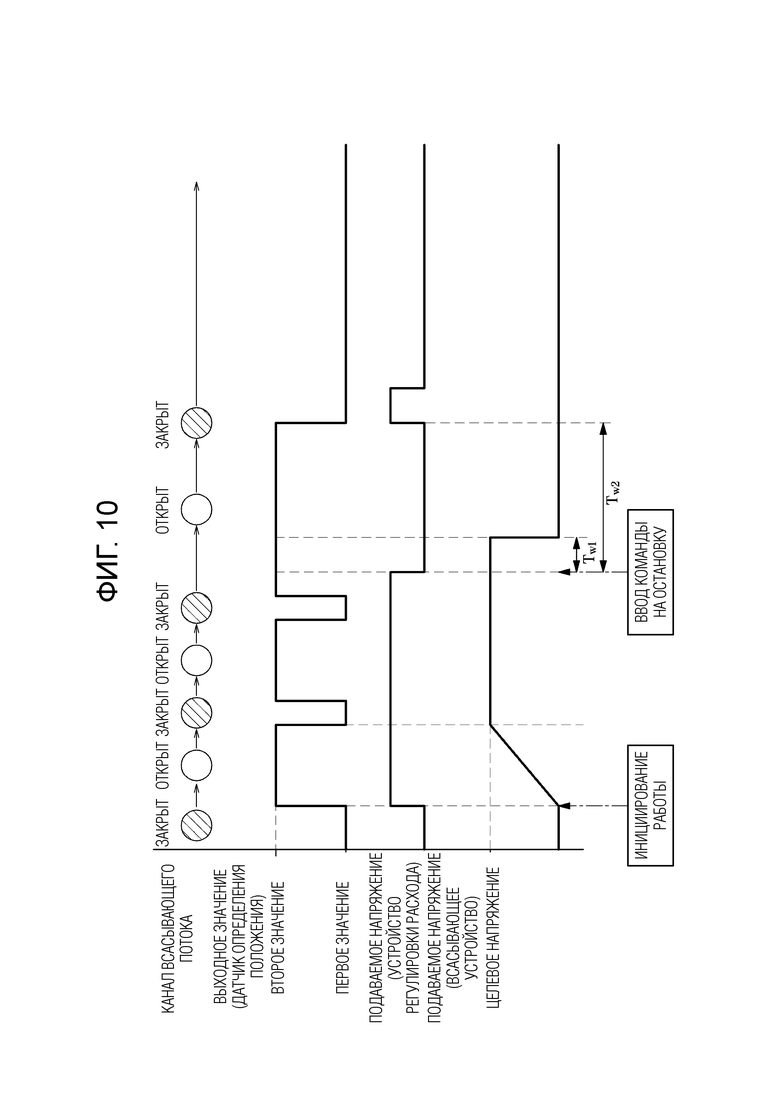
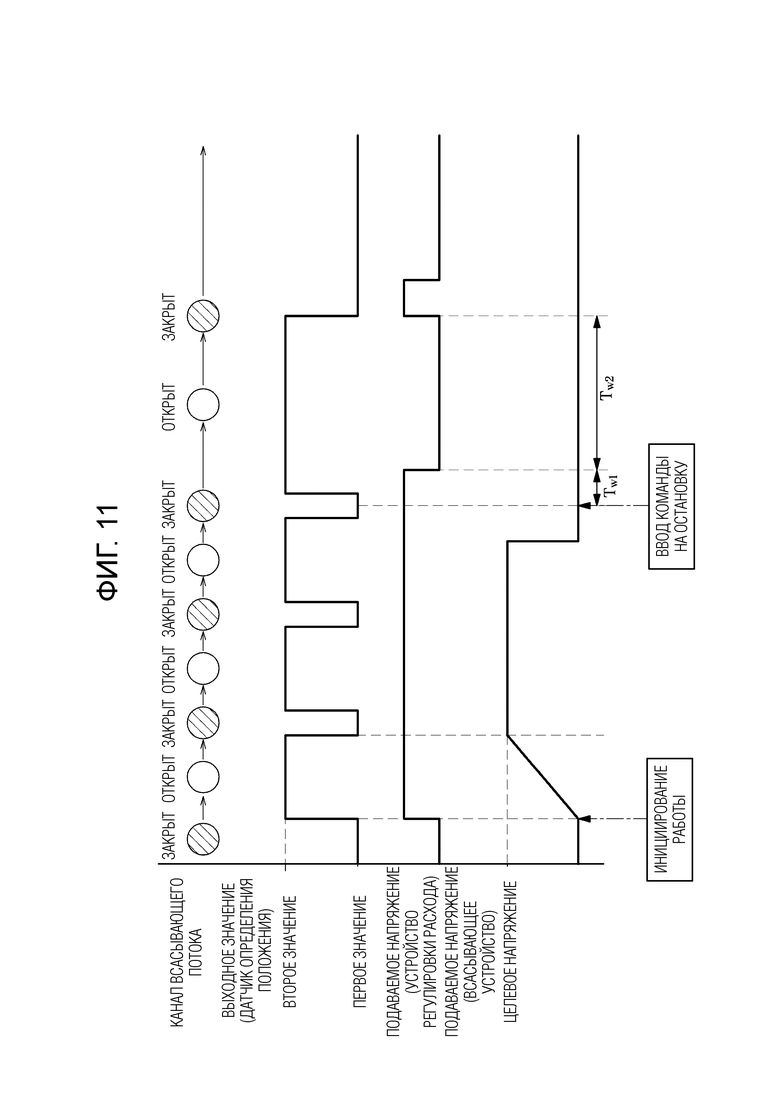
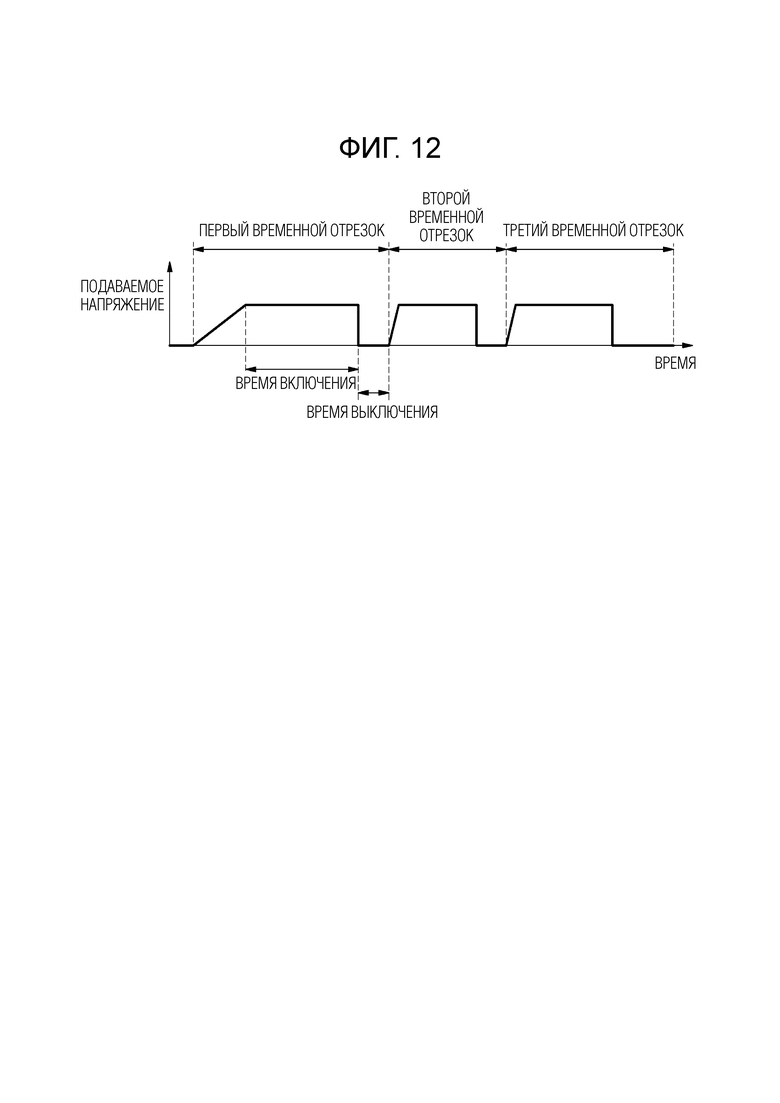
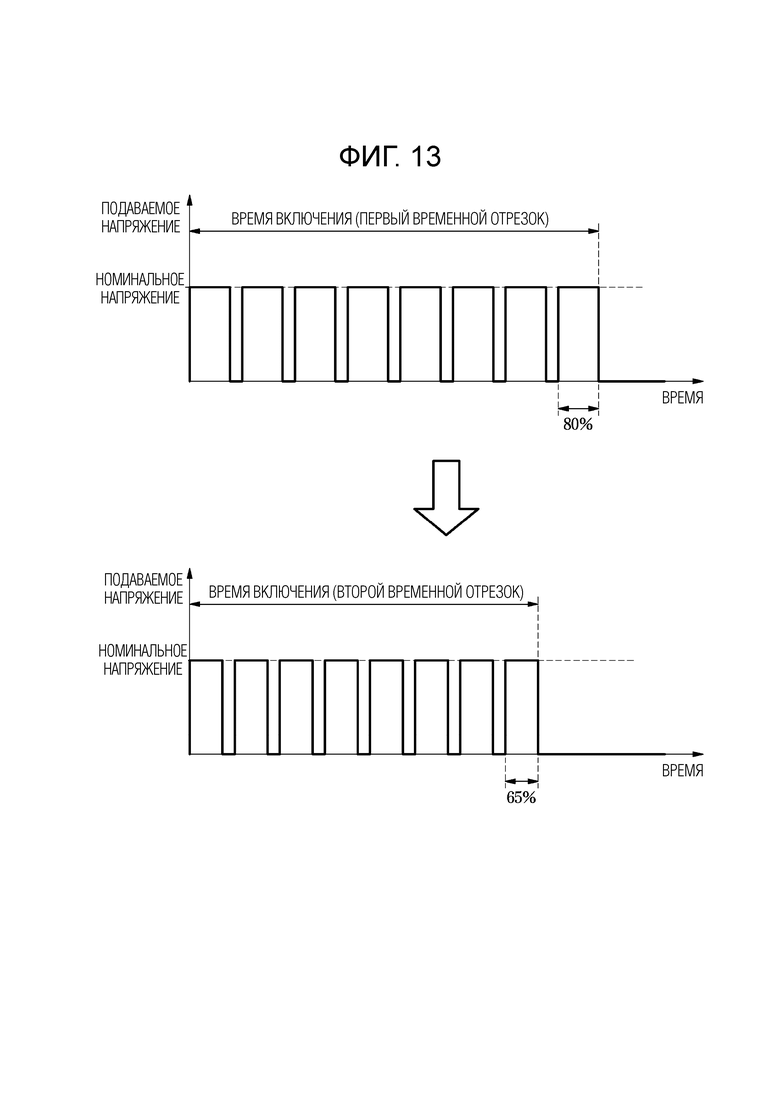
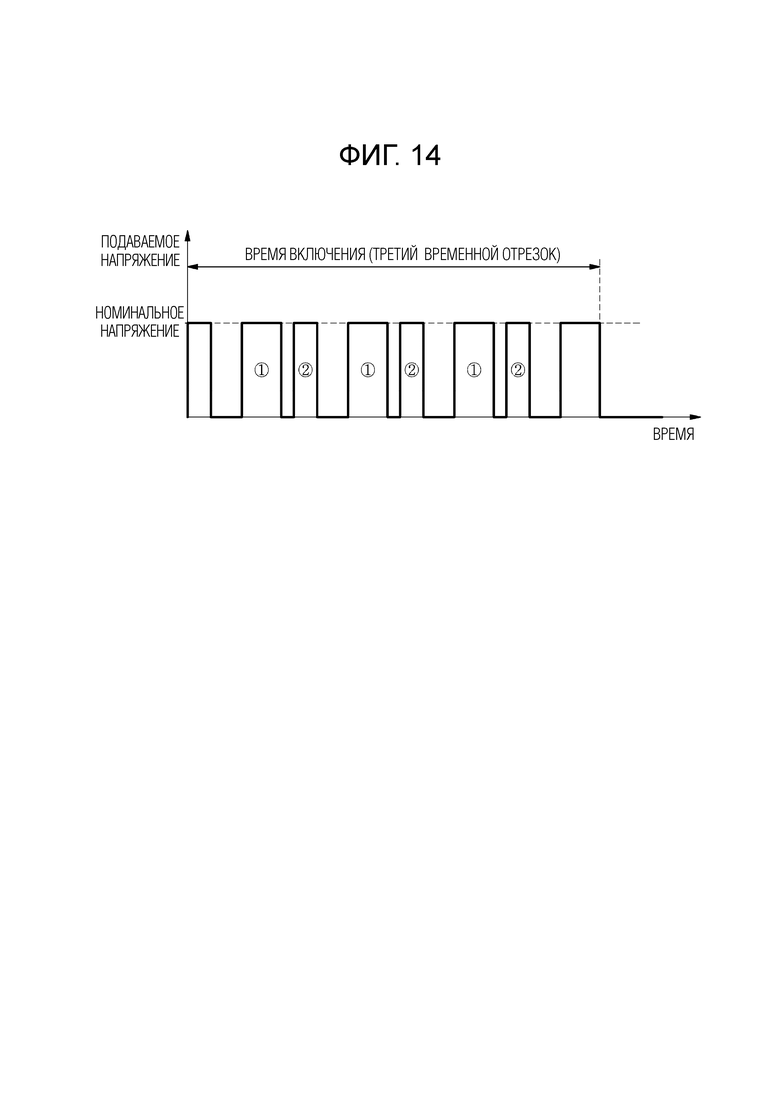
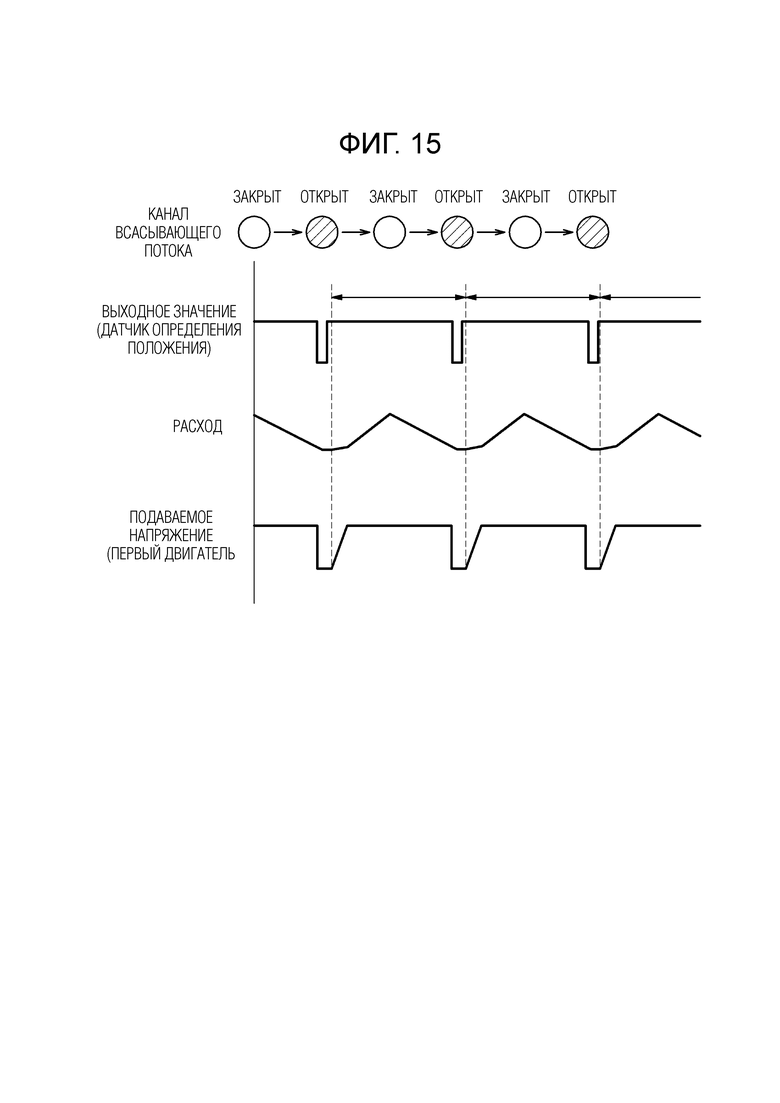
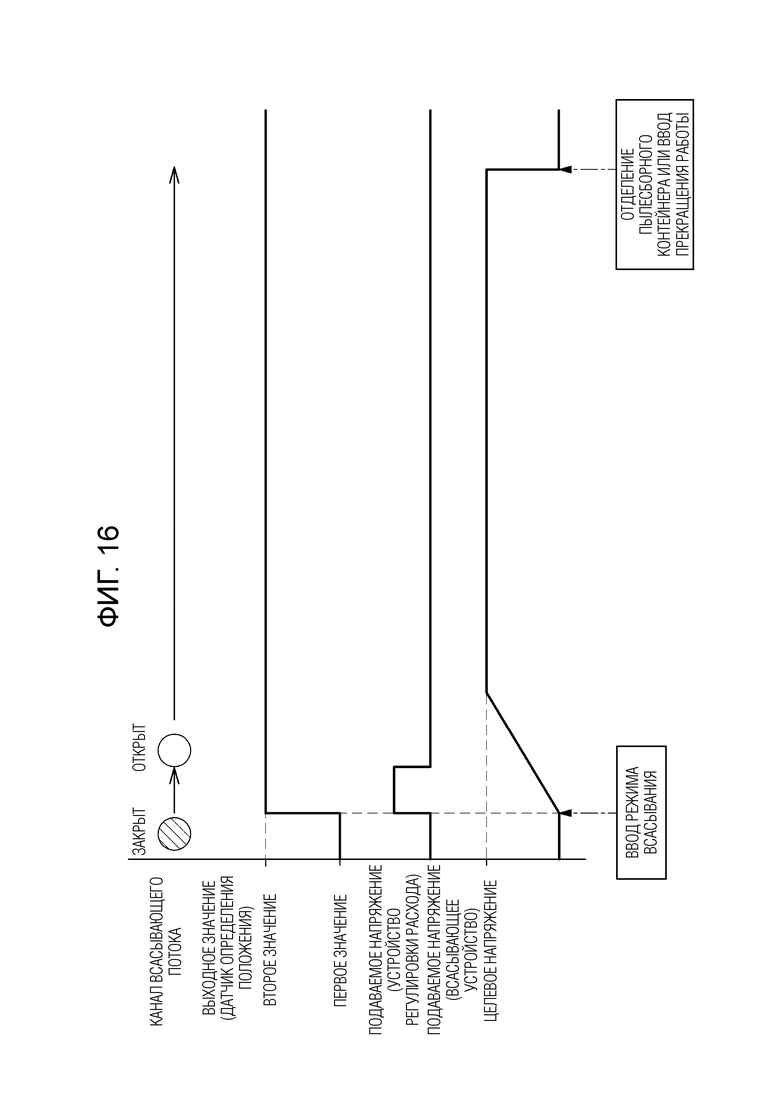
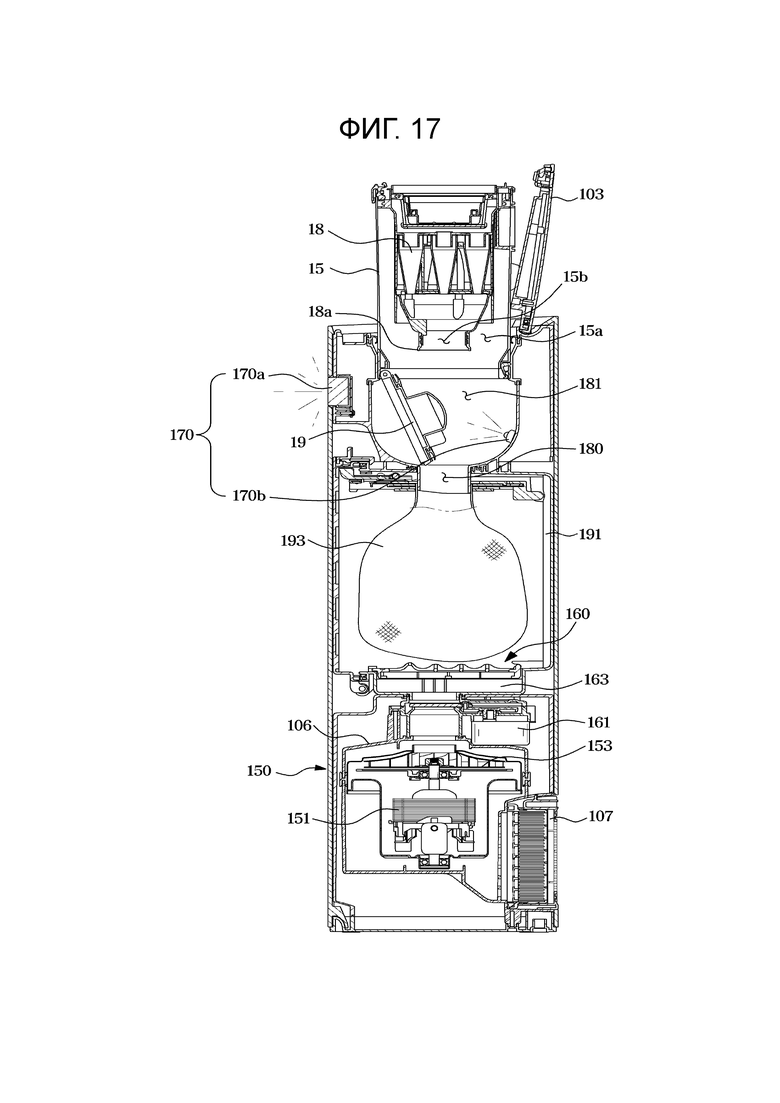
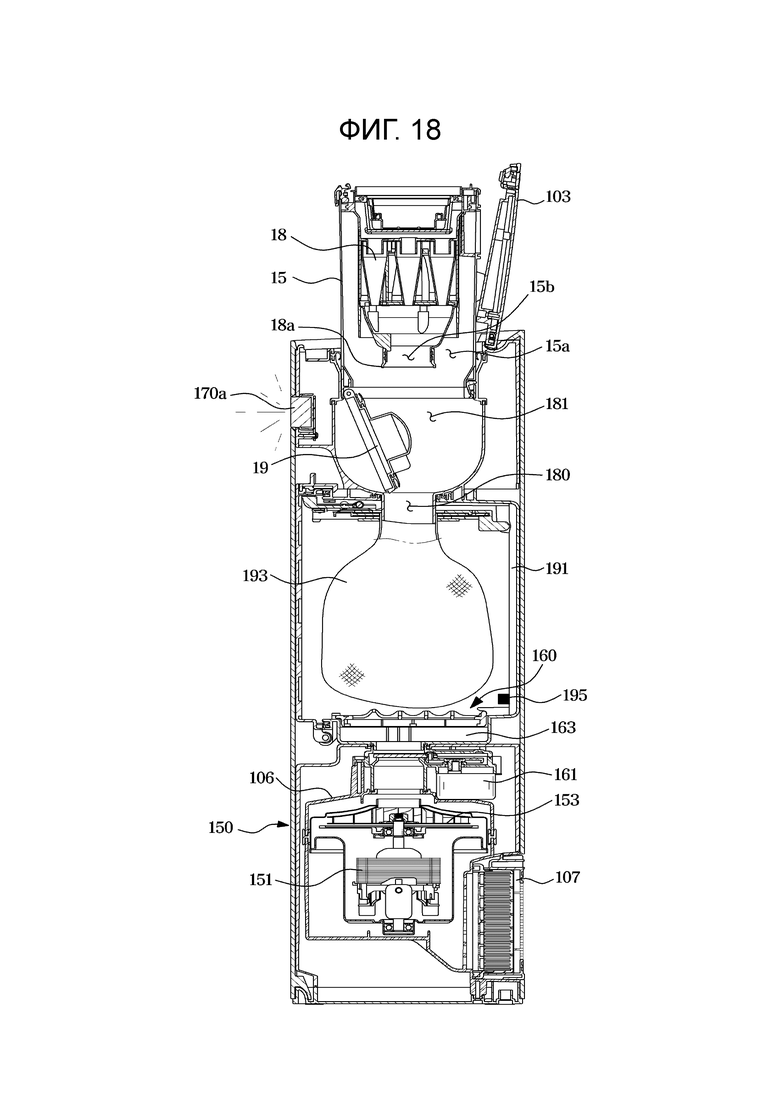
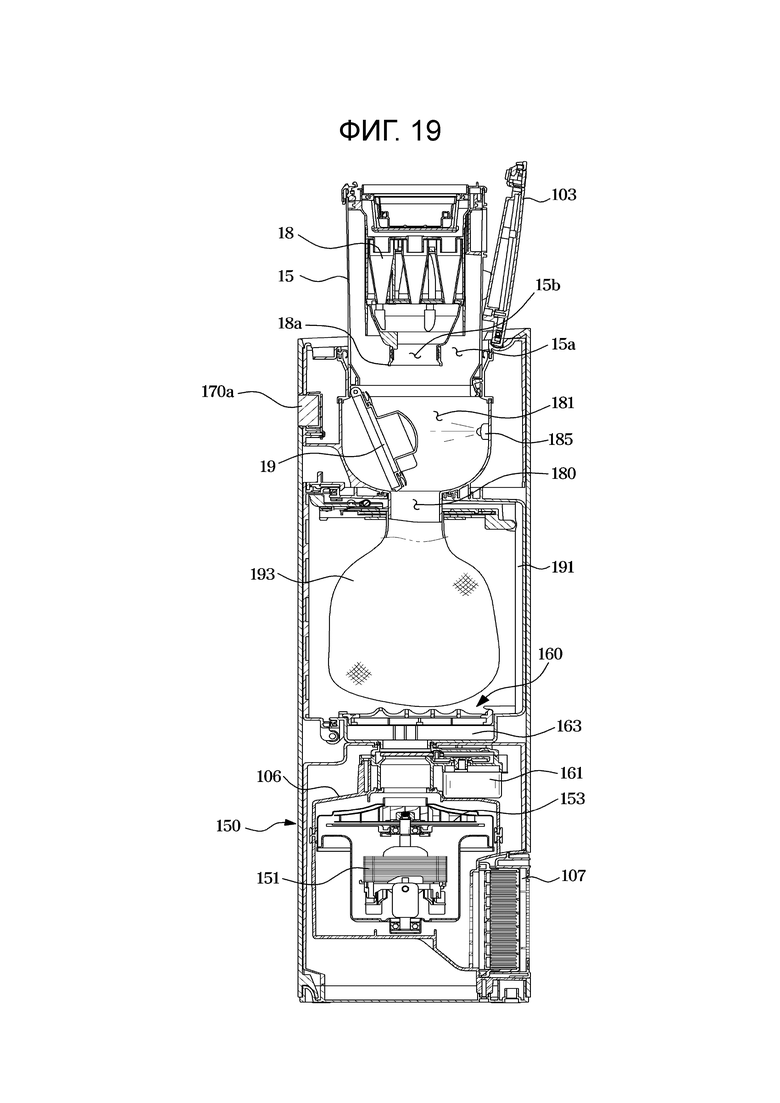
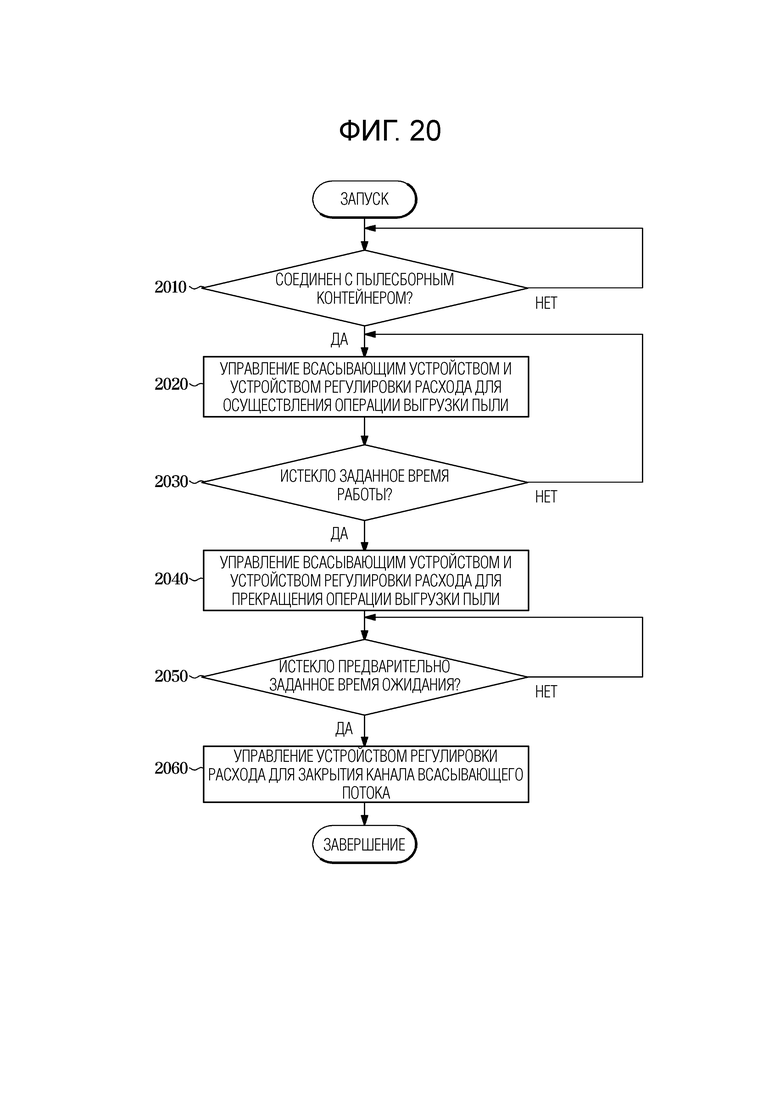
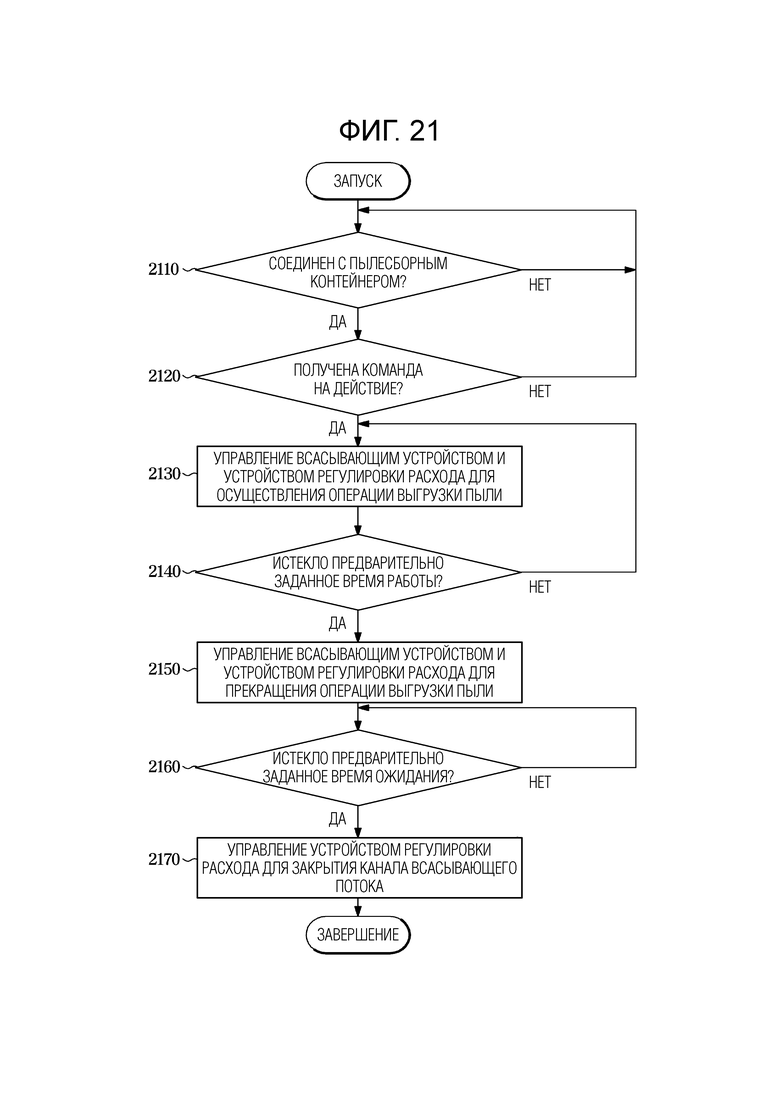
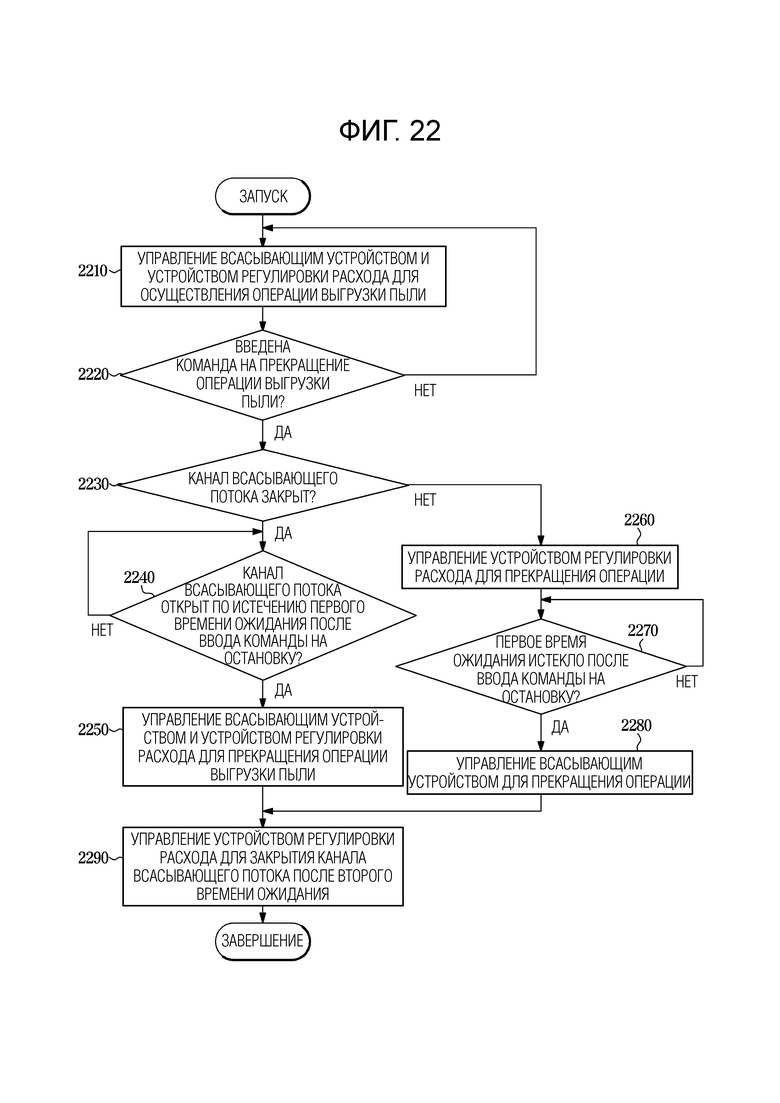
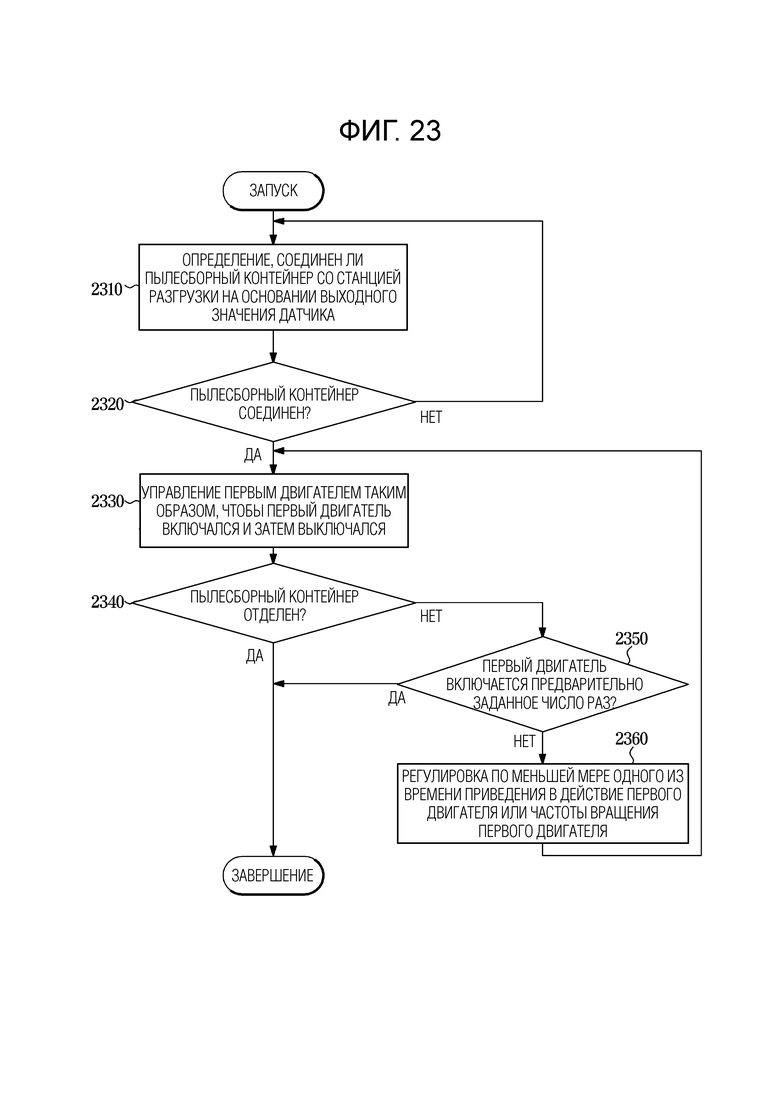
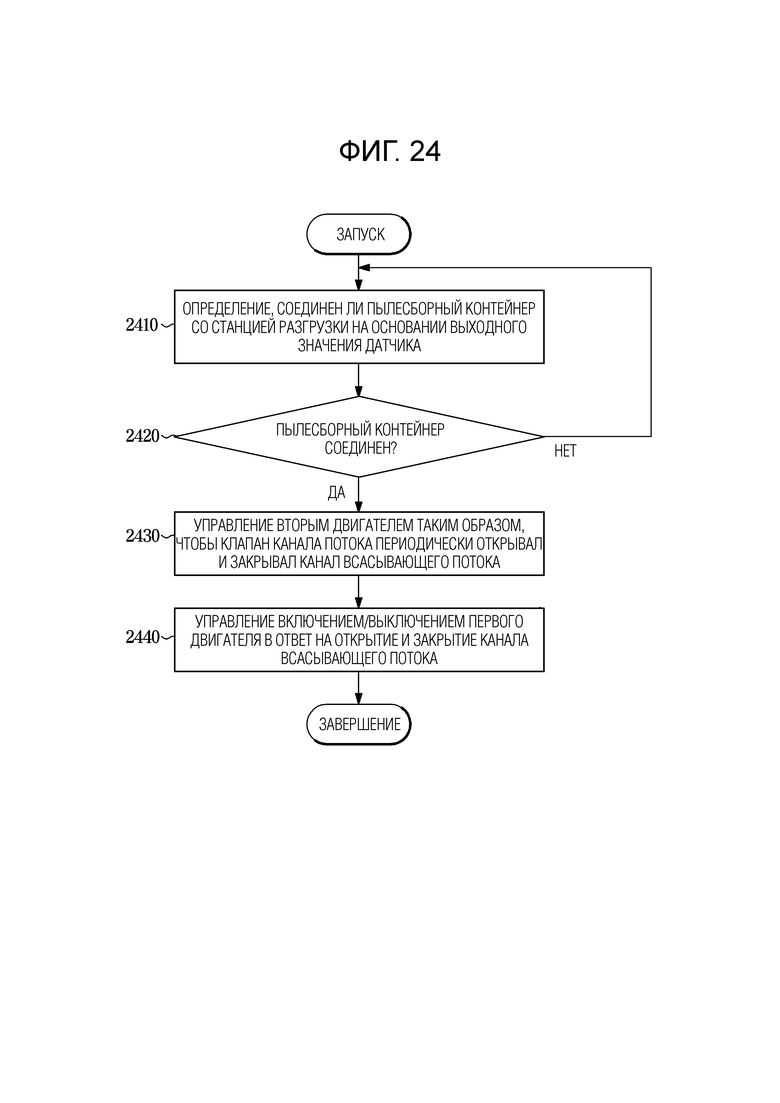
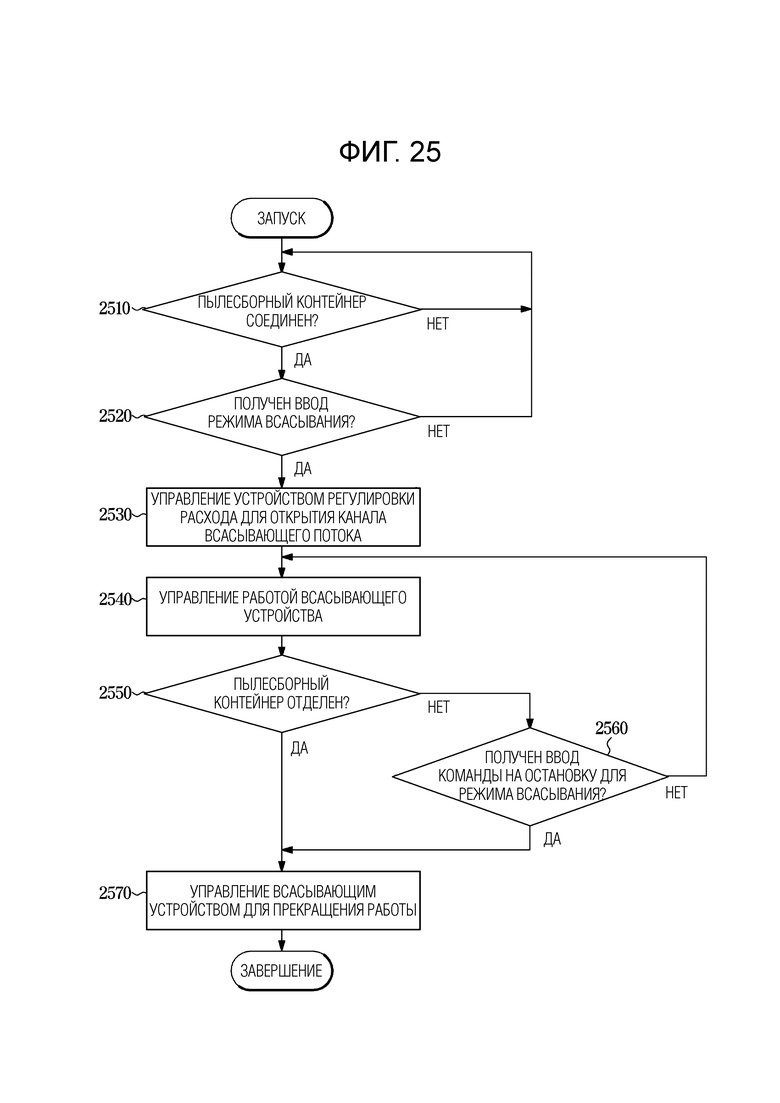
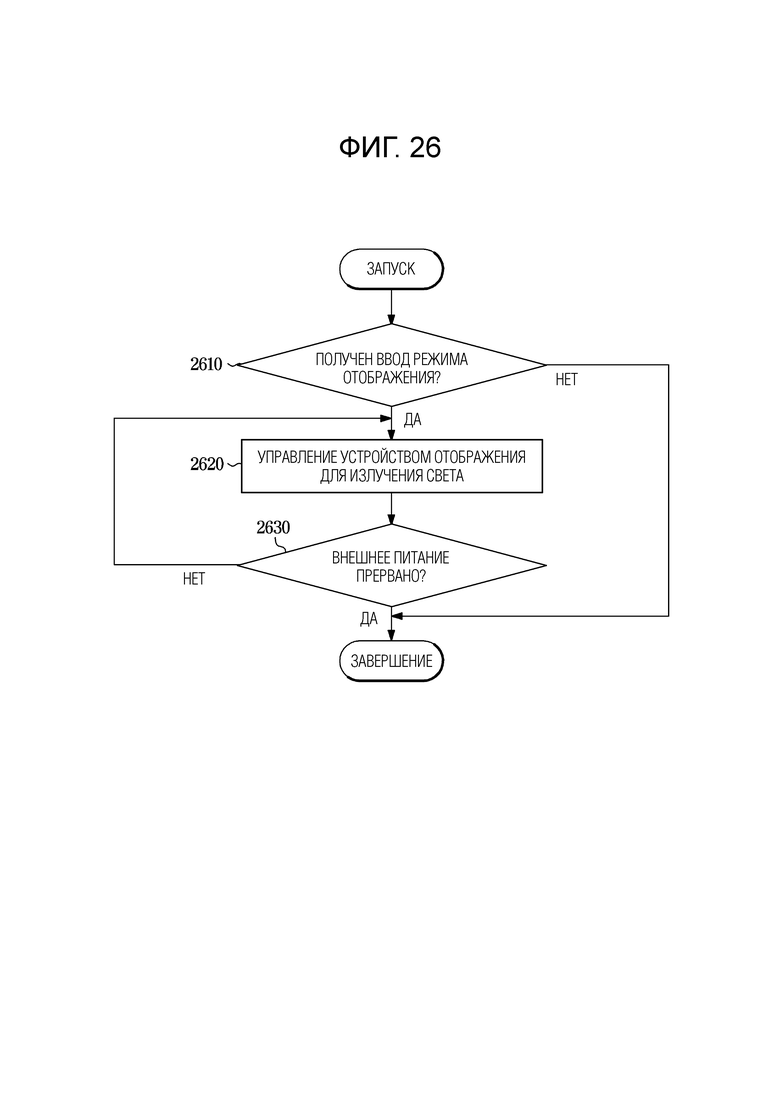
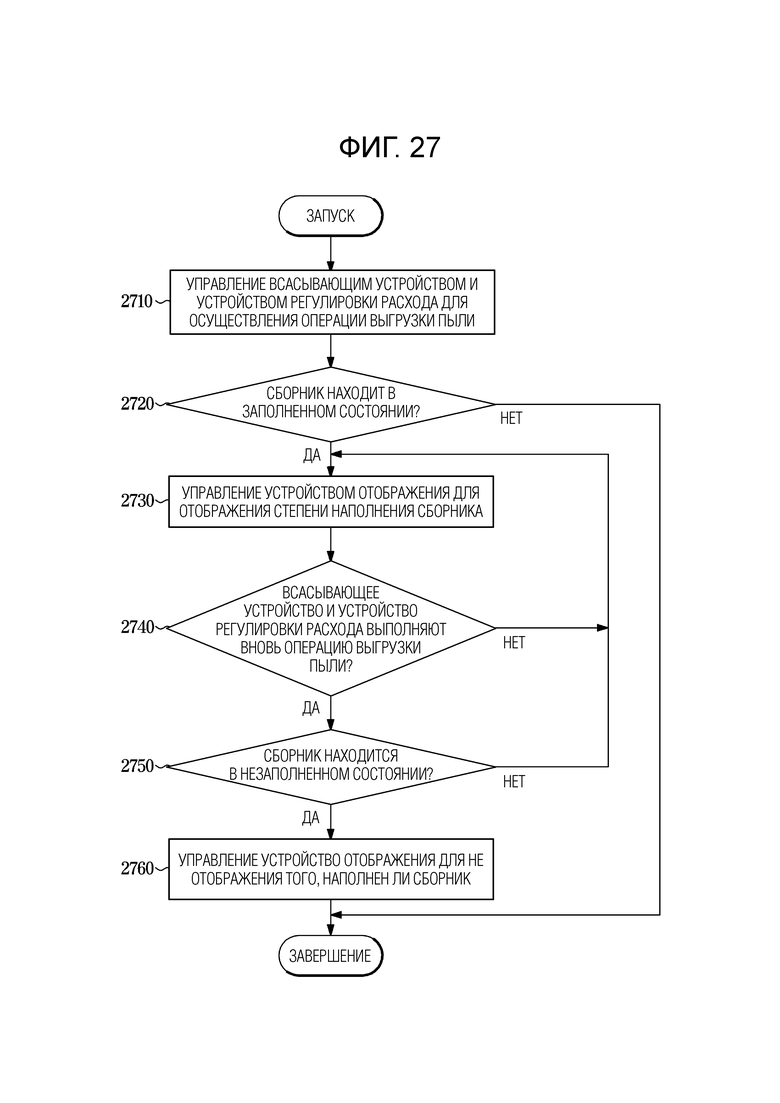
Группа изобретений относится к устройствам очистки помещений. Устройство содержит пылесос, включающий пылесборный контейнер, пылесборную станцию, с которой соединяется пылесборный контейнер. Пылесборная станция содержит всасывающее устройство, выполненное с возможностью создания всасывающего воздушного потока из пылесборного контейнера во всасывающее устройство и содержащее вентилятор и двигатель для вращения вентилятора, пылевой мешок, выполненный с возможностью сбора инородных веществ, устройство регулировки расхода, содержащее пластину, предусмотренную в канале всасывающего потока, и выполненное с возможностью открытия или закрытия канала всасывающего потока, и по меньшей мере один процессор, выполненный с возможностью управления работой всасывающего устройства на основании соединения пылесборного контейнера с пылесборной станцией. В то время как всасывающий воздушный поток протекает из пылесборного контейнера в пылесборную станцию согласно работе всасывающего устройства, процессор управляет устройством регулировки расхода для перемещения положения пластины устройства регулировки расхода с многократным открытием и закрытием канала всасывающего потока до прекращения работы всасывающего устройства. Обеспечивается автоматическая выгрузка инородных веществ из пылесборного контейнера, повышается эффективность выгрузки. 2 н. и 12 з.п. ф-лы, 27 ил.
1. Устройство очистки, содержащее:
пылесос, включающий в себя пылесборный контейнер, и
пылесборную станцию, с которой соединяется пылесборный контейнер,
причем пылесборная станция содержит:
всасывающее устройство, выполненное с возможностью создания всасывающего воздушного потока из пылесборного контейнера во всасывающее устройство и содержащее вентилятор и двигатель для вращения вентилятора,
пылевой мешок, выполненный с возможностью сбора инородных веществ, которые перемещаются всасывающим воздушным потоком при протекании всасывающего воздушного потока через канал всасывающего потока из пылесборного контейнера во всасывающее устройство,
устройство регулировки расхода, содержащее пластину, предусмотренную в канале всасывающего потока, и выполненное с возможностью открытия или закрытия канала всасывающего потока, и
по меньшей мере один процессор, выполненный с возможностью:
управления работой всасывающего устройства на основании соединения пылесборного контейнера с пылесборной станцией и,
в то время как всасывающий воздушный поток протекает из пылесборного контейнера в пылесборную станцию согласно работе всасывающего устройства, управления устройством регулировки расхода для перемещения положения пластины устройства регулировки расхода с многократным открытием и закрытием канала всасывающего потока до прекращения работы всасывающего устройства.
2. Устройство очистки по п.1, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью управления всасывающим устройством и устройством регулировки расхода для прекращения работы на основании заданного времени работы, истекающего после инициирования работы всасывающего устройства.
3. Устройство очистки по п.2, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью установки более длительным заданного времени работы на основании снижения частоты внешнего питания.
4. Устройство очистки по п.2, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью установки заданного времени работы таким образом, чтобы устройство регулировки расхода прекращало работу в состоянии открытия канала всасывающего потока на основании периода открытия и закрытия устройства регулировки расхода для канала всасывающего потока.
5. Устройство очистки по п.4, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью управления устройством регулировки расхода для закрытия канала всасывающего потока на основании заданного времени ожидания, истекающего после прекращения работы всасывающего устройства.
6. Устройство очистки по п.5, в котором пылесборная станция дополнительно содержит датчик определения положения, выполненный с возможностью:
выдачи первого значения в ответ на закрытие канала всасывающего потока устройством регулировки расхода, и
выдачи второго значения в ответ на открытие канала всасывающего потока устройством регулировки расхода, и
причем упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью, на основании уменьшения частоты внешнего питания, задержки момента времени, в который канал всасывающего потока определяется как закрытый после инициирования выдачи первого значения.
7. Устройство очистки по п.6, в котором упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью управления работой всасывающего устройства путем:
управления напряжением, подаваемым на всасывающее устройство, и
управления устройством регулировки расхода для открытия канала всасывающего потока, когда напряжение, подаваемое на всасывающее устройство, повышается до целевого напряжения.
8. Устройство очистки по п.1, в котором пылесборная станция дополнительно содержит устройство ввода, выполненное с возможностью приема ввода от пользователя.
9. Устройство очистки по п.8, в котором по меньшей мере один процессор в ответ на прием команды на действие через устройство ввода в ответ на соединение пылесборного контейнера с пылесборной станцией дополнительно выполнен с возможностью управления работой всасывающего устройства и устройства регулировки расхода в течение заданного времени работы.
10. Устройство очистки по п.9, в котором упомянутый по меньшей мере один процессор в ответ на прием команды на остановку через устройство ввода, когда всасывающее устройство и пылесборный контейнер работают, дополнительно выполнен с возможностью:
управления устройством регулировки расхода для открытия канала всасывающего потока и
управления всасывающим устройством для прекращения работы после заданного времени ожидания от ввода команды на остановку.
11. Устройство очистки по п.8, в котором упомянутый по меньшей мере один процессор в ответ на прием ввода режима всасывания через устройство ввода дополнительно выполнен с возможностью:
управления работой всасывающего устройства и
управления устройством регулировки расхода для открытия канала всасывающего потока, когда всасывающее устройство работает.
12. Устройство очистки по п.8, в котором пылесборная станция дополнительно содержит:
устройство отображения, на котором отображается рабочее состояние, и
датчик пылевого мешка, выполненный с возможностью детектирования того, находится ли пылевой мешок в заполненном состоянии, и
причем упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью управления устройством отображения для отображения состояния пылевого мешка в ответ на то, что пылевой мешок находится в заполненном состоянии.
13. Устройство очистки по п.12, в котором пылесборная станция дополнительно содержит ультрафиолетовую лампу, выполненную с возможностью облучения ультрафиолетовыми лучами по меньшей мере одного из пылесборного контейнера или пылевого мешка.
14. Способ управления устройством очистки по любому из пп.1-13, включающий в себя:
управление всасывающим устройством, выполненным с возможностью создания всасывающего воздушного потока из пылесборного контейнера во всасывающее устройство и работы на основании соединения пылесборного контейнера с пылесборной станцией; и,
в то время как всасывающий воздушный поток протекает из пылесборного контейнера в пылесборную станцию, управление устройством регулировки расхода с перемещением положения пластины устройства регулировки расхода для многократного открытия и закрытия канала всасывающего потока, по которому воздух перемещается внутри всасывающего устройства, до прекращения работы всасывающего устройства.
| Токарный резец | 1924 |
|
SU2016A1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ПЫЛИ В ПЫЛЕСОСЕ | 2008 |
|
RU2412638C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| JP 2017189453 A, 19.10.2017 | |||
| JP 3301452 B2, 15.07.2002 | |||
| US 9955841 B2, 01.05.2018 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

