Изобретение относится к системам интеллектуального управления судовыми двигателями с возможностью цифровых вычислений или обработки данных с использованием нечеткой логики, в частности, для процедуры сбора, накопления, передачи и централизации диагностических и функциональных параметров судовых двигателей.
Основу двигателей нового поколения составляют интеллектуальные агенты, которые позволяют подсистемам связывать гребные винты с машинным отделением и пунктом управления двигателем, а также с мостиком или даже удаленными объектами. Интеллектуальный агент - это агент, действующий разумным образом, который воспринимает окружающую среду, автономно предпринимает действия для достижения целей и может улучшать свою работу с помощью обучения или приобретения знаний. Интеллектуальные агенты эффективно объединяют средства регулирования пусковых воздушных клапанов, последовательности запуска и реверса, функции управления и другие. Благодаря использованию этих высокоинтегрированных систем представляется возможным контролировать и повышать прозрачность работы судовых установок, кроме того, они обеспечивают мониторинг состояния двигателя в режиме реального времени, поддерживают интеллектуальную оптимизацию и облегчают принятие решений. Все это дает возможность операторам судов и поставщикам двигателей более эффективно эксплуатировать бортовые системы. В изобретении решаются проблемы, связанные с интеллектуализацией автоматической системы управления корабельными силовыми установками.
На сегодняшний день в таких областях, как экономика, медицина, в автомобилестроении широко применяют диагностические и экспертные системы с использованием «искусственного интеллекта» на основе нейро-нечетких сетей.
Известна СИСТЕМА УПРАВЛЕНИЯ ЗНАНИЯМИ ДЛЯ РАЗРЕШЕНИЯ СИТУАЦИЙ по патенту RU 2480826 от 27.04.2013
Изобретение относится к системам управления знаниями для разрешения ситуаций (СУЗ PC) и предназначено для поддержки разрешения проблемных ситуаций, связанных с неудовлетворительным качеством конкретных объектов. Технический результат заключается в улучшении характеристик обрабатываемой информации, а также в повышении качества визуализации ситуаций. Система управления знаниями для разрешения ситуаций содержит блок создания знаний, блок организации знаний, с входом которого соединен выход блока создания знаний, блок локализации знаний, с входом которого соединен выход блока организации знаний, блок позиционирования знаний, с входом которого соединен выход блока локализации знаний, и блок повторного использования знаний, с входами которого соединены выходы блоков локализации и позиционирования знаний. Блок системной интеграции, входы и выходы которого соединены, соответственно, с входами и выходами блоков создания знаний, организации знаний, локализации знаний, позиционирования знаний, повторного использования знаний, и блок системной визуализации, вход которого соединен с выходом блока системной интеграции.
Недостатками данного технического решения является отсутствие независимой связи системы управления знаниями с окружающей средой.
Известна ИНТЕЛЛЕКТУАЛЬНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ВЫБОРА "ОПТИМЭЛЬ" по патенту RU 2564641 от 10.10.2015
Изобретение относится к компьютерным системам, использующим модели, основанные на знаниях, а именно к системам, синтезирующим интеллектуальные решения в виде выбора нужного знания из заданной области знания. Техническим результатом является обеспечение ускоренного доступа к сформированным знаниям для пользователя при решении задач выбора. Интеллектуальная информационная система выбора «Оптимэль» состоит из последовательно соединенных машиночитаемого носителя, в котором находятся блок распределения заданий, блок базы знаний, блок ввода знаний, блок базы данных словарей, блока рабочей части диалога, и компьютера, через технические возможности которого пользователь имеет доступ к интеллектуальной информационной системе «Оптимэль» и ее результатам работы.
Недостатком реализации данного технического решения является необходимость ручного пополнения базы данных экспертом.
Известен СПОСОБ ПОИСКА МЕТОДОВ РАЗРЕШЕНИЯ ТЕХНИЧЕСКИХ ПРОТИВОРЕЧИЙ И СИСТЕМА НА ОСНОВЕ ОБУЧАЕМОЙ НЕЙРОННОЙ СЕТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ по патенту RU 2707917 от 02.12.2019, где система содержит модуль приема запроса пользователя системы, модуль распознавания языка интерфейса с запросом пользователя, модуль создания алгоритма для формирования кода запроса, модуль формирования кода запроса, модуль формирования соответствующей коду запроса структуры баз данных, модуль формирования приоритетов для обучения нейронной сети, модуль дообучения нейронной сети по соответствующим коду запроса параметрам 1-n, нейронная сеть, модуль формирование кода ответа, модуль перевода кода ответа в язык интерфейса, модуль выдачи ответа пользователю.
Система работает следующим образом. Запрос вводится через модуль приема запроса в виде текста интерфейса. Следующий, последовательный модуль распознает язык интерфейса с запросом пользователя, в следующих модулях создается алгоритм для формирования кода запроса и код запроса. Затем сигнал поступает в модуль формирования структуры баз данных, а следующий модуль формирует приоритеты для обучения нейронной сети. Дообучение нейронной сети по соответствующим коду запросу параметрам осуществляют с помощью предыдущего модуля. Далее нейронная сеть осуществляет поиск методов разрешения технических противоречий с использованием принципов морфологического анализа и нечеткой логики. Метод морфологического анализа основан на комбинаторике. Суть его состоит в идее получения детального описания всех существующих и возможных (допустимых) технических систем исследуемого класса с последующим поиском на этом множестве описания технической системы, наиболее полно соответствующего поставленной цели. Для этого в интересующем изделии или объекте выделяют группу основных технических и/или социальных и/или экономических, характеристик. Для каждой характеристики выбирают альтернативные варианты, то есть возможные варианты исполнения объекта. Комбинируя их между собой, получают множество различных решений, в том числе представляющих практический интерес. Предварительно нейронная сеть формирует устойчивые взаимосвязи характеристик соответствующего коду запроса предмета с его техническими и/или социальными и/или экономическими, характеристиками в виде наслоения псевдоплоскостей, обучается на полученных взаимосвязях и осуществляет поиск решения преодоления того или иного технического противоречия или технической проблемы и уточняет различными видами фильтров направление их решения, затем нейронная сеть устанавливает взаимосвязи между исследуемым предметом и упоминанием его в базах патентов и каждая совокупность формируется в своем информационном пространстве, после чего с помощью метода морфологического проектирования формируют совокупность матриц, каждая из которых сформирована путем упорядоченных переборов по исчерпывающему и конечному перечню технических и/или социальных и/или экономических, характеристик, учитываемых при применении технических решений с установлением типа зависимости между ними, после чего на основе зафиксированных взаимосвязей осуществляют работу с четкой и нечеткой логикой, создают систему ранжирования, которая является базой для обучения нейросети и основой материала для формирования детализированного ответа на запрос. Далее формируется код ответа, который переводится в язык интерфейса, и выходной модуль выдает ответ пользователю.
Недостатком этой системы является использование перебора вариантов, имеющихся в базе знаний, вместо решения, сформированного из текущего состояния окружающей среды.
ТЕХНИЧЕСКОЙ ЗАДАЧЕЙ предлагаемого изобретения является создание системы самообучения интеллектуальных агентов управления судовым двигателем, обеспечивающей выработку собственных решений, адекватных окружающей обстановке, для управления судовым двигателем.
ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ заключается в том, что построенная интеллектуальная система управления двигателем за счет использования самообучения интеллектуального агента формирует собственное решение исходя из внутренних и внешних возмущающих воздействий окружающей среды.
Технический результат достигается использованием совокупности отличительных признаков предложенной системы и взаимосвязи ее блоков и узлов.
Для решения поставленной технической задачи и достижения технического результата предложена система самообучения интеллектуальных агентов управления судовым двигателем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ заключается в следующем.
Данная система позволяет реализовать контроль, анализ, диагноз технического состояния и управление всей сложной динамической системы, состоящей из главных, вспомогательных элементов СЭУ, элементов систем поддержания груза, элементов систем пожарной безопасности,
Блочная структура системы обеспечивает процедуру сбора, накопления, передачи и централизации диагностических и функциональных параметров элементов СЭУ. В условиях реальной эксплуатации судна, при любом предусмотренном для эксплуатируемого типа судов режиме (ходовом, маневренном, движении во льдах и т.д.), производится непрерывный сбор информации от всех датчиков, установленных на судовой энергетической установке, а также от датчиков, отражающих внешние условия работы (температура наружного воздуха, влажность, скорость и направление ветра, волнение моря и др.).
Вся информация от датчиков поступает на блок моделирования узлов и агрегатов двигателя, где обрабатывается и сортируется по принадлежности к подсистемам и узлам судовой энергетической установки и синхронно, по нескольким параллельным каналам, передается на интеллектуальный модуль.
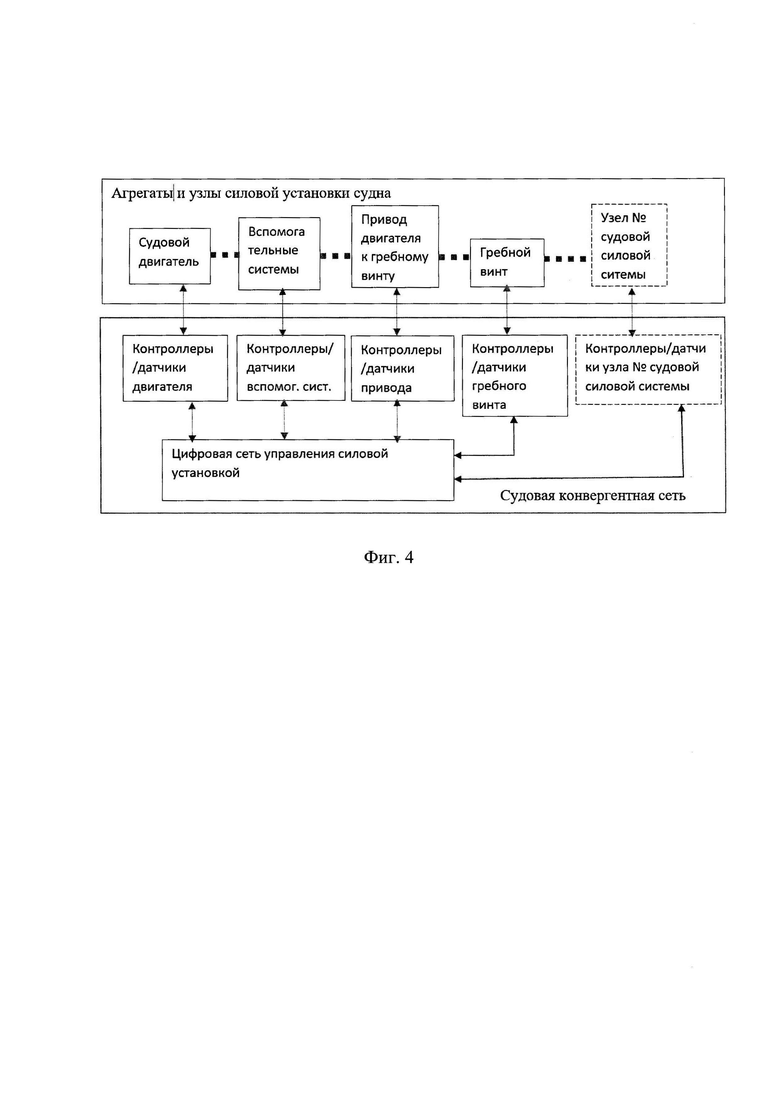
В отличие от обычного агента, реагирующего на внешнее воздействие путем перебора имеющихся в базе знаний правил, которые самостоятельно не пополняются, интеллектуальный агент содержит блоки, позволяющие самостоятельно вырабатывать новые знания в ходе его работы.
Общая архитектура управления судовым двигателем включает три части: 1) модели установки/подсистемы, которые могут имитировать характеристики силовой установки и ее приводов, 2) отдельные алгоритмы распределенной системы управления, 3) мультиагентная база знаний, которая может поддерживать исследование и применение передовой интеллектуальной стратегии управления. Различные модели и элементы управления, составляющие ее, могут быть легко заменены, поскольку их интерфейсы будут четко определены картой взаимозависимости. Целью этой интеллектуальной платформы является создание интегрированной среды моделирования и имитации, которая объединяет различные взаимозависимые установки и подсистемы судового двигателя, кроме того, эта платформа может отслеживать состояния основных узлов и систем и на основании этого разрабатывать передовые интеллектуальные стратегии управления.
Информация о состоянии и изменениях окружающей среды, о текущем режиме работы двигателя и других ключевых параметрах судовой энергетической установки и внешнего окружения с помощью интерфейсной части распределяется на несколько потоков. База знаний предназначена для накопления информации об управлении двигателем. Основным элементом системы самообучения является нечеткий классификатор, задача которого заключается в выработке управляющего сигнала для интеллектуального агента.
Сущность изобретения поясняется графическими материалами, на которых изображено:
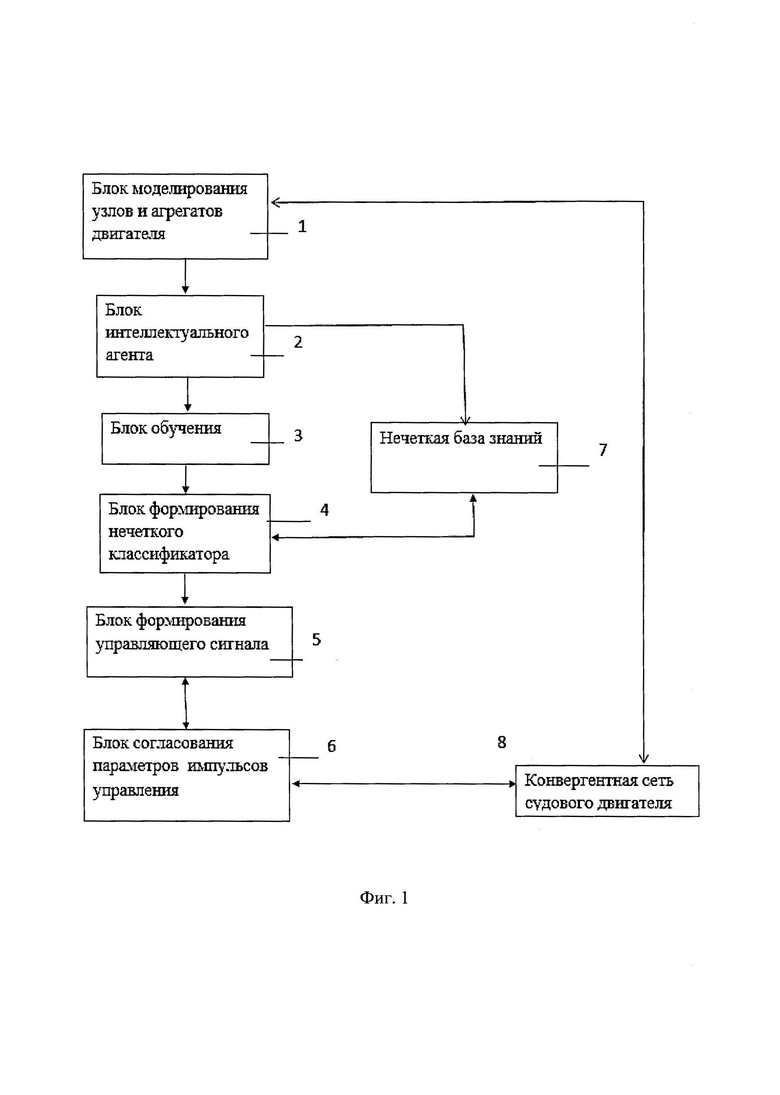
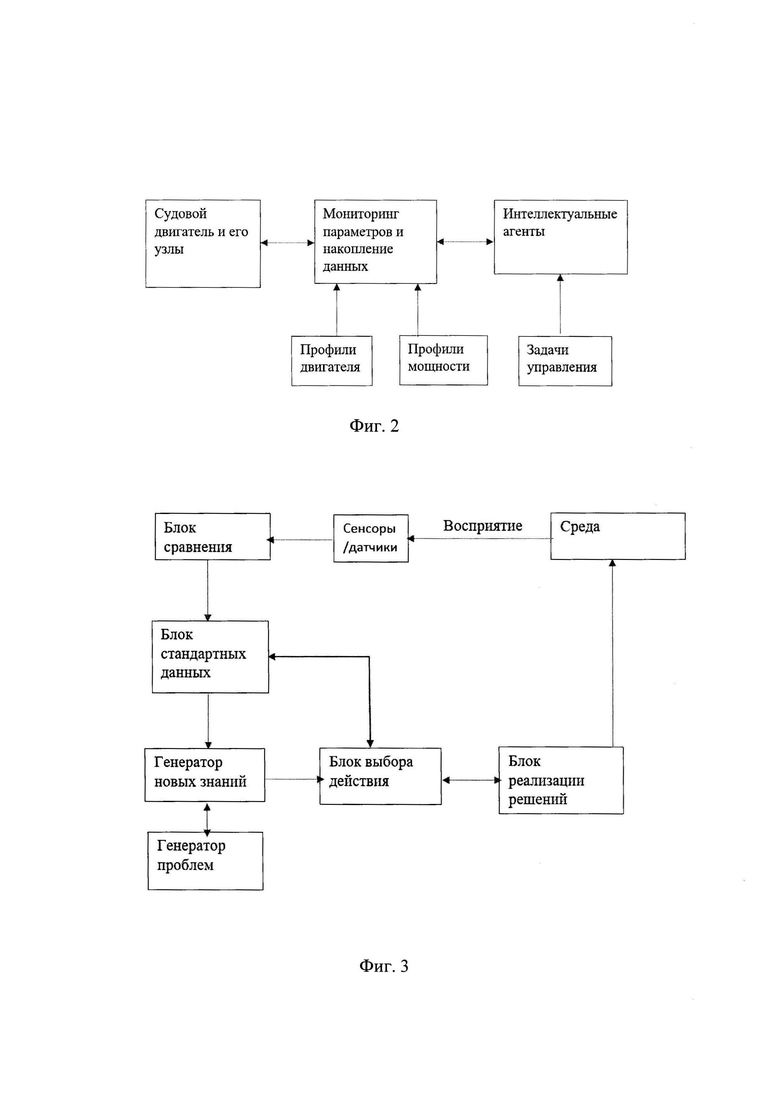
Фиг. 1 - система самообучения интеллектуального агента Фиг. 2 - схема управления судовым двигателем Фиг. 3 - схема интеллектуального агента Фиг. 4 - архитектура конвергентной судовой сети
СИСТЕМА СОСТОИТ из блока моделирования 1 узлов и агрегатов двигателя на основе нечеткой нейронной сети, блока интеллектуального агента 2, блока обучения 3, блока формирования нечеткого классификатора 4, блока формирования управляющего сигнала 5, блока согласования параметров импульсов управления 6, нечеткой базы знаний 7, конвергентной сети судового двигателя 8. Выход блока моделирования 1 соединен с блоком интеллектуального агента 2, а вход блока моделирования 1 подсоединен к датчикам параметров судового двигателя и элементам судовой единой конвергентной сети 8, а выход интеллектуального агента 2 соединен с блоком обучения 3 и со входом нечеткой базы знаний 7, где для самообучения нейронной сети используют возможность быстрого обучения на основе глубоких сетей доверия и ограниченной машины Больцмана, при этом расположение выхода блока обучения 1 обеспечивает возможность поступления сигнала на блок формирования нечеткого классификатора 4, который взаимообразно связан с блоком нечеткой базы данных 7, а также поступление сигнала на блок формирования управляющего сигнала 5, который взаимообразно соединен с блоком согласования параметров импульсов управления 6, установленный с возможностью получения информации от датчиков судового двигателя 8.
Интеллектуальная система управления двигателем РАБОТАЕТ СЛЕДУЮЩИМ ОБРАЗОМ.
На блок интеллектуального агента поступает 2 текущая информация от блока моделирования узлов и агрегатов двигателя 1, отражающая параметры их работы. Интеллектуальный агент 2, анализирует данные о состоянии параметров, влияющих на работу двигателя, после чего генерирует управляющие сигналы, наиболее целесообразные в текущей ситуации, которые через интерфейсную часть подаются в базу знаний 7 для последующей проверки их на адекватность и эффективность. Одновременно сигнал поступает на блок формирования нечеткого классификатора 4.
Обучение нечеткого классификатора 4 заключается в нахождении вектора К, который минимизирует расстояние между опытными данными и результатами логического вывода.
Нечеткий классификатор формируется из нескольких слоев D, каждый из которых имеет ширину Ni нейронов.
Самообучение сети состоит в поиске правильных весов, которые могут быть использованы для корректной классификации входных примеров.
В данном случае для самообучения нейронной сети используется быстрое обучение на основе глубоких сетей доверия (DBN) и ограниченной машины Больцмана (RBM).
Метод основан на изменении модели искусственной нейронной сети с дискриминантной на генеративную. Дискриминантная модель - это модель, которая моделирует классификационные характеристики сети. Объективная функция, которую необходимо минимизировать, - это ошибка между требуемыми целями классификации и полученными целями. С другой стороны, генеративная модель - это модель, которая моделирует способность сети генерировать исходные данные. Целью является минимизация ошибки между данными, генерируемыми моделью, и исходными данными.
Генеративная модель способна повторно генерировать исходные данные, учитывая состояния скрытых единиц, что является ее представлением о данных реального мира. Такая модель называется глубокой сетью доверия (DBN). Модель DBN позволяет сети генерировать видимые активации на основе состояний ее скрытых единиц, что представляет собой убеждение сети.
Чтобы получить состояния скрытых блоков, соответствующих видимым данным, используется ограниченная машина Больцмана между каждыми двумя последовательными слоями сети.
Чтобы оптимизировать заданную конфигурацию видимых и скрытых блоков, энергия модели должна быть минимизирована.
Функция предварительного обучения заключается в том, чтобы применить данные на входной слой двухслойной RBM и в результате получить скрытые активации, а затем повторно генерировать модель видимых активации, и, наконец, генерировать модель скрытых активации. Таким образом, веса модель могут быть обновлены для заданных входных данных.
После обучения текущего слоя его веса замораживаются, а активации скрытого слоя используются в качестве видимых входов следующего слоя, и применяется тот же алгоритм обучения. Полученные веса сети глубинного обучения используются для инициализации этапа тонкой настройки.
Фаза тонкой настройки представляет собой обычный алгоритм обратного распространения. Для задач классификации поверх сети добавляется слой, ширина которого равна количеству целей или классов. Каждый нейрон этого слоя активируется для каждой метки класса, а остальные деактивируются. Обратное распространение начинается с весов, полученных на этапе предварительного обучения. Активации верхнего слоя получаются для каждого примера обучающего набора или партии примеров, полученных в прямом пути, а затем сигнал ошибки между полученными активациями и требуемыми целями передается обратно в сеть для корректировки весов.
Процесс самообучения заключается в том, что в ходе работы двигателя интеллектуальным агентом выполняется периодический опрос значений датчиков и контролеров на входе и сигналов положения систем управления на выходе. Затем выполняется сравнение текущего значения сигналов органов управления для данного правила со значениями в базе знаний. Далее раздел базы знаний «необходимое положение органов управления» корректируется с учетом нового опыта, полученного во время работы и в согласовании с которыми формируются импульсы управления судовым двигателем.
Конечной целью процесса самообучения является анализ характеристик установок и систем судового двигателя, настройка алгоритма оптимизации параметров его работы и в конечном итоге разработка интеллектуальной стратегии управления автоматизацией и эксплуатацией.
Система самообучения интеллектуальных агентов управления судовым двигателем содержит блок моделирования узлов и агрегатов двигателя на основе нечеткой нейронной сети, блок интеллектуального агента, блок обучения, блок формирования нечеткого классификатора, блок формирования управляющего сигнала, блок согласования параметров импульсов управления, нечеткую базу знаний, конвергентную сеть судового двигателя, соединенные определенным образом. Обеспечивается выработка собственных решений для управления судовым двигателем с учетом внутренних и внешних возмущающих воздействий окружающей среды. 4 ил.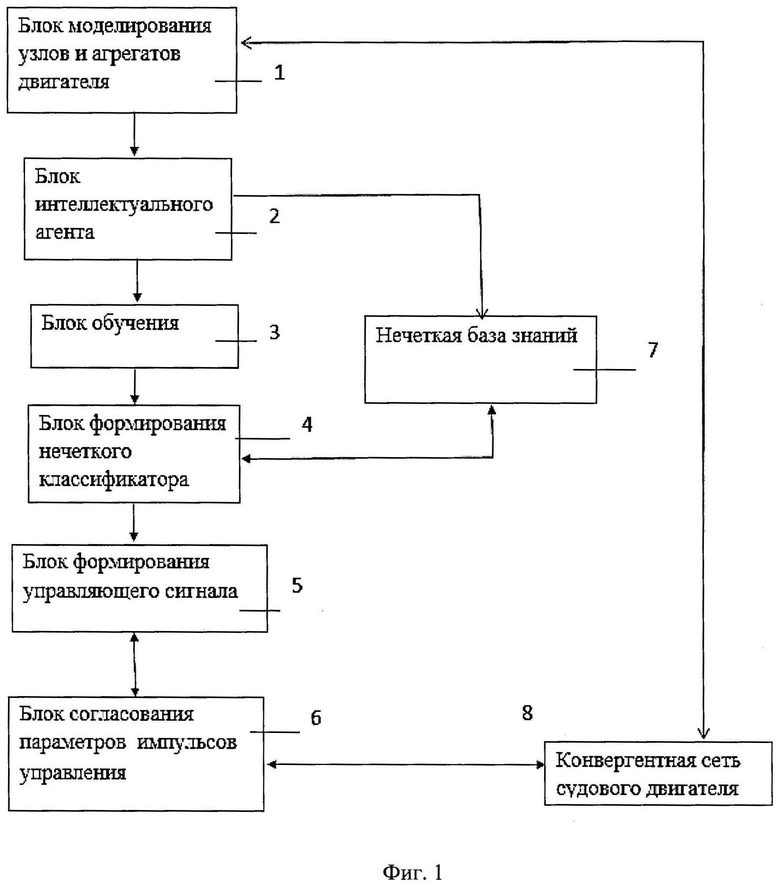
Система самообучения интеллектуальных агентов управления судовым двигателем, включающая блок моделирования узлов и агрегатов двигателя на основе нечеткой нейронной сети, блок интеллектуального агента, блок обучения, блок формирования нечеткого классификатора, блок формирования управляющего сигнала, блок согласования параметров импульсов управления, нечеткую базу знаний, конвергентную сеть судового двигателя, при этом выход блока моделирования соединен с блоком интеллектуального агента, а вход блока моделирования подсоединен к датчикам параметров судового двигателя и элементам судовой единой конвергентной сети, выход интеллектуального агента соединен с блоком обучения и со входом нечеткой базы знаний, где для самообучения нейронной сети используют возможность быстрого обучения на основе глубоких сетей доверия и ограниченной машины Больцмана, расположение выхода блока обучения обеспечивает возможность поступления сигнала на блок формирования нечеткого классификатора, который взаимообразно связан с блоком нечеткой базы данных, а также поступление сигнала на блок формирования управляющего сигнала, который взаимообразно соединен с блоком согласования параметров импульсов управления, установленный с возможностью получения информации от датчиков судового двигателя.
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИЖИТЕЛЬНЫМ КОМПЛЕКСОМ СУДОВ ЛЕДОВОГО КЛАССА И ЛЕДОКОЛОВ | 2016 |
|
RU2648544C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА С НЕЙРО-НЕЧЕТКОЙ СЕТЬЮ ДЛЯ КОМПЛЕКСНОЙ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ И УПРАВЛЕНИЯ СУДОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2020 |
|
RU2737457C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ КОНТРОЛЛЕР С НЕЙРОННОЙ СЕТЬЮ И ПРАВИЛАМИ САМОМОДИФИКАЦИИ | 2003 |
|
RU2266558C2 |
| CN 107748498 A, 02.03.2018 | |||
| CN 100489702 C, 20.05.2009. | |||

