Группа изобретений относится к способам и системам автоматического управления судном по курсу, а именно к способу и интеллектуальной системе управления судном по курсу, объединяющих в себе преимущества нейросетевых систем и систем управления на основе нечеткой логики.
Все существующие системы автоматического управления (САУ) судном по курсу, независимо от конструкции отдельных элементов, работают по принципу отклонения, т.е. в системе непрерывно сравниваются действительное и заданное значения курса, и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. В общем виде САУ судном по курсу включает средства управления судном (т.е. рулевое устройство судна), регулятор (также называемый авторулевым), объект управления (т.е. судно) и внутренние и внешние обратные связи между этими элементами.
В настоящее время широкое распространение получили адаптивные САУ судном по курсу, реализованные на базе пропорционально-дифференциальных (ПД) или пропорционально-интегрально-дифференциальных (ПИД) регуляторов. Примером такой системы является система авторулевого, включающая автоматический адаптивный регулятор в виде ПИД регулятора [патент RU 2282884 C2, опубл. 27.08.2006]. Однако эффективность управления курсом судна с помощью адаптивных систем на базе ПД и ПИД регуляторов зависит, главным образом, от принятой изначально математической модели закона управления, которая далеко не всегда может соответствовать реальным условиям плавания, поэтому такие системы не могут обеспечить оптимальный режим работы как при автоматической стабилизации судна на курсе, так и при маневрировании. Кроме того, такие системы имеют низкую помехозащищенность при работе в условиях волнения и не позволяют проведение адаптивных процедур в режиме реального времени.
В настоящее время на смену адаптивным САУ приходят интеллектуальные системы автоматического управления (ИСАУ) судном по курсу, которые имеют расширенные возможности выполнения более сложных задач в неопределенной среде при неполной информации, требуемой для решения задач управления судном по курсу. К ИСАУ судном по курсу относятся системы, использующие математический аппарат теории искусственных нейронных сетей (НС), на основе нечеткой логики, на основе экспертных систем, на основе генетических алгоритмов или их комбинации.
Например, известен судовой авторулевой, включающий нейросетевой регулятор на базе программной среды MATLAB [патент US 6611737 B1, опубл. 26.08.2003]. Этот нейросетвой регулятор содержит информационно-аналитический блок для прогнозирования и выработки курса судна, связанный протоколами передачи данных с блоком сбора информации о курсе судна и блоком вывода обобщенного сигнала управления курсом судна. Здесь нейросетевой регулятор решает и другие задачи управления судном и содержит множество других блоков, не связанных напрямую с курсом судна, поэтому архитектура используемой НС не является оптимальной по времени обучения, простоте реализации и качеству аппроксимации для прикладных задач управления именно движением судна по курсу.
Известна ИСАУ судном по курсу, выполненная на базе нейросетевого регулятора, включающего информационно-аналитический блок для обработки данных с целью прогнозирования и выработки курса судна, который связан протоколами передачи данных с блоком сбора данных для сбора информации о курсе судна и блоком вывода обработанных данных для вывода обобщенного сигнала управления курсом судна [патент RU 2359308 C2, опубл. 20.06.2009]. Нейросетевой регулятор этой системы дополнительно включает две или более вычислительных системы в виде независимых вычислительных алгоритмов, каждая из которых соединена с информационно-аналитическим блоком с помощью интерфейса и имеет возможность обработки данных, переданных информационно-аналитическим блоком, и базу знаний, соединенную с информационно-аналитическим блоком интерфейсом и предназначенную для хранения критериев выбора информационно-аналитическим блоком той или иной вычислительной системы. Каждая из вычислительных систем способна обрабатывать массивы данных на основе таких нейронных сетей, как реккурентная нейронная сеть Элмана, многослойная сеть прямого распространения или нейронная сеть на основе радиально-базисных функций. Здесь информационно-аналитический блок также включает интеллектуальный классификатор, соединенный интерфейсом с блоком сбора данных и блоком вывода обработанных данных и способный выбирать одну вычислительную систему или более для оптимальной обработки данных.
Несмотря на наличие множества преимуществ вышеописанных ИСАУ судном по курсу с нейросетевым регулятором в контуре прямой связи системы, например таких как способность прогнозировать изменения входной информации, сохранение работоспособности при частичном выходе из строя элементов и связей, самообучаемость, гибкость, ассоциативность, абсолютная и быстрая сходимость к одному из устойчивых состояний под действием входного сигнала, попадающего в область притяжения этого состояния, все же такие системы имеют и недостатки, определяемые тем, что нейронные сети не являются универсальными, т.е. для перепрограммирования нейросетевого регулятора на решение новой задачи необходимо фактически заново создать внутреннюю архитектуру его нейронной сети. И хотя такой недостаток может быть преодолен с помощью соответствующего обучения нейронной сети, все же количество типов нейросетевых моделей динамики движения судна в составе ИСАУ по курсу ограничено производительностью вычислительной архитектуры всей системы в целом.
Между тем, вышеотмеченных недостатков лишены ИСАУ судном по курсу, использующие регуляторы на нечеткой логике, основными преимуществами которых являются повышенное быстродействие процессов управления и высокая эффективность фильтрации случайных возмущений при обработке информации. В настоящее время на судах гражданского флота уже применяются серийно выпускаемые ИСАУ судном по курсу, основанные на нечеткой логике, например, авторулевые модели «Navipilot AD II» фирмы Sperry Marine и «NAVpilot 500» фирмы Furuno.
В качестве прототипа выбрана одна из последних разработанных ИСАУ судном по курсу, использующая способ управления судном по курсу с помощью алгоритма нечеткой логики [заявка CN 102183957 A, опубл. 14.09.2011]. В этой системе выполняются следующие операции: задание значение курса судна, определение отклонения курса как разницы между действительным значением курса, полученным по данным обратной связи, и заданным значениями курса и определение степени изменения отклонения курса; настройка входных данных отклонения курса и отклонения степени изменения отклонения курса, генерирование нового отклонения курса и отклонения степени изменения отклонения курса, передача нового отклонения курса и отклонения степени изменения отклонения курса, служащих в качестве двух входных переменных для нечеткого управления переменными, получение нечеткого правила управления, требуемого для управления курсом в соответствии с правилами нечеткого управления, вывод сигнала управляющего воздействия в виде данных угла кладки пера руля и передача этих данных на рулевую машину; получение последовательности во времени данных значений действительного курса, углов кладки пера руля и степеней изменения отклонения курса в виде вектора входных данных для обучения сетевой структуры, построенной на методе опорных векторов, динамическая идентификация инверсной модели движения судна по курсу и генерация сигнала компенсации по прямой связи; а также отслеживание соответствия заданному курсу в соответствии с заданной точностью управления под управлением регулятора на нечеткой логике с помощью блока, реализующего метод опорных векторов. Однако, несмотря на присущие подобным системам повышенное быстродействие процессов управления и высокую эффективность фильтрации случайных возмущений, эта система существенно ограничена по приспособленности к конкретным условиям плавания, тем что нечеткие множества здесь задаются изначально, т.е. они не изменяются, а только используются для принятия системой решения, а используемые обучаемые сетевые структуры малопригодны к настройке регулятора на нечеткой логике при изменяющихся условиях плавания, т.к. выбираются с помощью метода опорных векторов, т.е. с помощью линейного классификатора. Из-за этого такая система достаточно трудно адаптируется к изменениям условий плавания, что в большинстве случаев представляет собой нелинейную задачу.
Технической задачей настоящего изобретения является создание такой интеллектуальной системы управления судном по курсу и соответствующего способа, которые позволяли бы обеспечить одновременно как высокое быстродействие процессов управления и высокую эффективность фильтрации случайных возмущений, присущих системам на нечеткой логике, так и способность прогнозирования изменения входных данных, возможность сохранения работоспособности при частичном выходе из строя элементов и связей, самообучаемость и гибкость, присущих системам с нейронными сетями, для быстрой адаптации с высокой точностью к любым условиям плавания и, в частности, к резким изменениям условий плавания.
Для решения поставленной технической задачи, в соответствии с одним аспектом настоящего изобретения предлагается способ автоматического управления судном по курсу, согласно которому: задают значение курса судна как объекта управления, определяют по данным обратной связи с объектом управления данные ошибки управления как отклонение между действительным и заданным значениями курса; определяют управляющее воздействие в виде данных угла кладки пера руля судна по данным ошибки управления с использованием алгоритма нечеткой логики с набором нечетких правил; идентифицируют модель объекта управления на базе сетевой структуры по данным обратной связи; и корректируют управляющее воздействие в соответствии с идентифицированной моделью объекта управления. Новым является то, что используют модель объекта управления в виде нейросетевой модели объекта управления, а корректировку управляющего воздействия осуществляют за счет настройки настраиваемых параметров алгоритма нечеткой логики.
В данные обратной связи для обработки с использованием алгоритма нечеткой логики предпочтительно включать, по крайней мере, данные управляющих воздействий и данные действительного значения курса. В такие данные может быть дополнительно включено значение действительной линейной скорости судна.
В данные обратной связи для обработки с использованием алгоритма нечеткой логики можно включать данные, выбираемые из группы: значение угла кладки руля, значение угла рыскания судна, скорость изменения угла рыскания судна, число перекладок руля и/или скорость изменения кладок пера руля.
Для настройки настраиваемых параметров алгоритма нечеткой логики могут быть выполнены следующие операции: получают и идентифицируют данные движения судна по курсу и данные управляющих воздействий; идентифицируют данные движения судна по курсу и данные управляющих воздействий и определяют данные критериальных признаков движения судна по идентифицированным данным движения судна по курсу и данным управляющих воздействий с использованием базы знаний поведения судна по курсу; выбирают нейросетевую модель объекта управления на базе определенных данных критериальных признаков движения судна; определяют данные настраиваемых параметров алгоритма нечеткой логики в соответствии с выбранной нейросетевой моделью объекта управления.
Здесь, идентификацию полученных данных движения судна по курсу и данных управляющих воздействий можно проводить с помощью анализа спектра этих данных с использованием дискретного преобразования Фурье.
При этом, при анализе спектра данных движения судна по курсу и данных управляющих воздействий можно использовать от двух до восьми гармоник спектра.
Базу знаний поведения судна по курсу предпочтительно создавать и обучать с использованием нейронной сети с радиально-базисными функциями активации.
Нейросетевую модель объекта управления можно выбирать из нескольких нейросетевых моделей управления из группы: нейронные сети прямого распространения с алгоритмом обучения Левенберга-Марквардта, нейронная сеть прямого распространения с алгоритмом обучения Моллера, рекуррентные нейронные сети Элмана с алгоритмом обучения Левенберга-Марквардта и/или рекуррентная нейронная сеть Элмана с алгоритмом обучения Моллера. Здесь предпочтительным является использование нейронной сети прямого распространения с алгоритмом обучения Левенберга-Марквардта.
Данные настраиваемых параметров алгоритма нечеткой логики могут быть определены с помощью генетического алгоритма.
В способе может быть использован алгоритм нечеткой логики в виде набора лингвистических условных операторов, определяющих конкретные ситуации управления судном по курсу, которые предварительно определяют на основании экспертных суждений по двум нечетким переменным, в качестве которых используют данные ошибки управления и данные скорости изменения ошибки управления.
При этом лингвистические условные операторы могут быть сформированы в матрицу с использованием функции Гаусса и сигмовидной функции принадлежности.
В соответствии с другим аспектом настоящего изобретения предлагается интеллектуальная система автоматического управления судном по курсу, включающая: судно как объект управления; регулятор на нечеткой логике для определения управляющего воздействия на объект управления по ошибке управления, как отклонению между действительным и заданным значениями курса, установленный в прямом контуре системы; эмулятор для корректировки управляющего воздействия за счет идентификации модели объекта управления на базе сетевой структуры по данным обратной связи; и прямые и обратные связи между объектом управления, регулятором на нечеткой логике и эмулятором, входящие в прямой и обратный контуры системы, соответственно. Новым является то, что эмулятор установлен в обратном контуре системы и выполнен в виде нейросетевого эмулятора, в котором в качестве модели объекта управления использована нейросетевая модель управления, и который выполнен с возможностью корректировки управляющего воздействия за счет настройки настраиваемых параметров регулятора на нечеткой логике.
Судно может быть оборудовано средством кладки пера руля, средством задания значения курса и средствами определения данных движения судна по курсу, при этом: один вход регулятора на нечеткой логике соединен с выходами средства задания значения курса и средств определения данных движения судна по курсу для получения данных ошибки управления; другой вход регулятора на нечеткой логике соединен с выходом нейросетевого эмулятора для получения данных настраиваемых параметров регулятора на нечеткой логике; выход регулятора на нечеткой логике соединен со входом средства кладки пера руля для передачи данных управляющего воздействия; один вход нейросетевого эмулятора соединен с выходом средств определения данных движения судна по курсу для получения данных движения судна по курсу; другой вход нейросетевого эмулятора соединен с выходом регулятора на нечеткой логике для получения данных управляющих воздействий.
Нейросетевой эмулятор может включать нейросетевой классификатор, блок нейросетевой модели объекта управления и блок оптимизации, при этом: вход нейросетевого классификатора является входом нейросетевого эмулятора для получения данных движения судна по курсу и данных управляющих воздействий от объекта управления и регулятора на нечеткой логике, соответственно; выход нейросетевого классификатора соединен со входом блока нейросетевой модели объекта управления для передачи данных критериальных признаков движения судна, определенных нейросетевым классификатором по данным движения судна по курсу и данным управляющих воздействий; выход блока нейросетевой модели объекта управления соединен со входом блока оптимизации для передачи данных параметров нейронной сети, соответствующих нейросетевой модели объекта управления, загруженной в блок нейросетевой модели объекта управления на базе данных критериальных признаков движения судна; выход блока оптимизации является выходом нейросетевого эмулятора для передачи на один из входов регулятора на нечеткой логике данных настраиваемых параметров регулятора на нечеткой логике, определенных блоком оптимизации по загруженной в него нейросетевой модели объекта управления.
Предпочтительно, когда нейросетевой классификатор содержит базу знаний поведения судна по курсу для определения критериальных признаков движения судна по данным движения судна по курсу и данным управляющих воздействий.
Далее изобретение поясняется более подробно на примерах осуществления, сопровождающихся чертежами, на которых представлено:
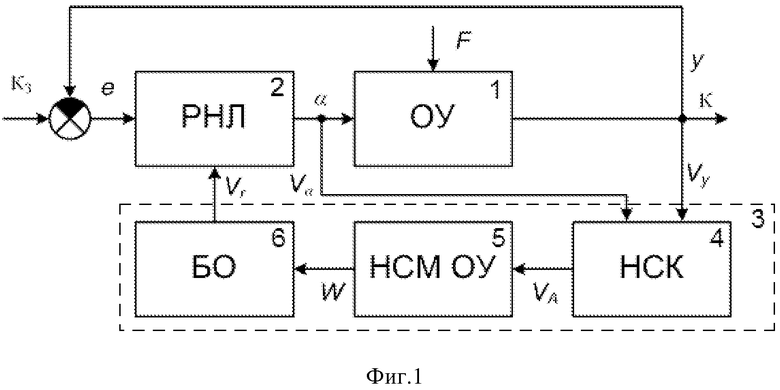
фиг. 1 - функциональная блок-схема интеллектуальной системы автоматического управления (ИСАУ) судном по курсу по варианту осуществления настоящего изобретения;
фиг. 2 - график зависимости среднеквадратичной ошибки (СКО) управления от типа используемой нейронной сети;
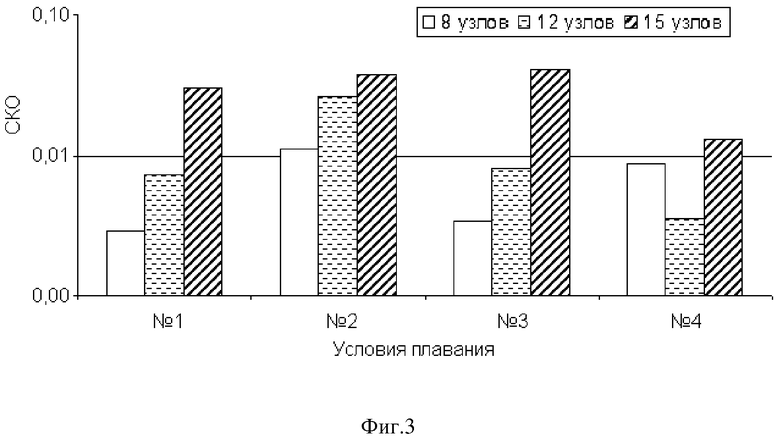
фиг. 3 - график зависимости среднеквадратичной ошибки (СКО) обучения нейронных сетей от условий плавания для траулера;
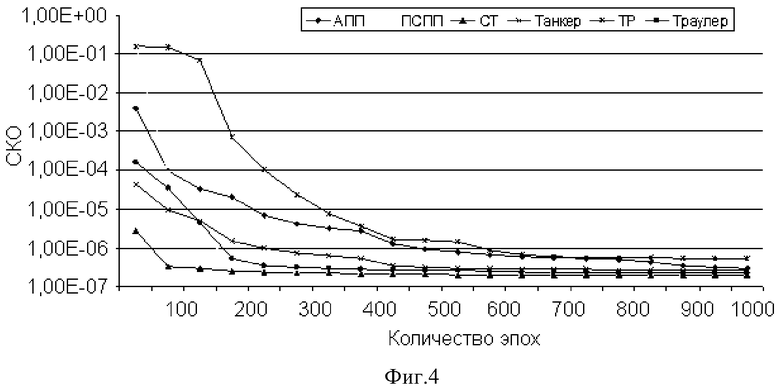
фиг. 4 - график изменения точности управления в процессе обучения нейронных сетей для различных типов судов;
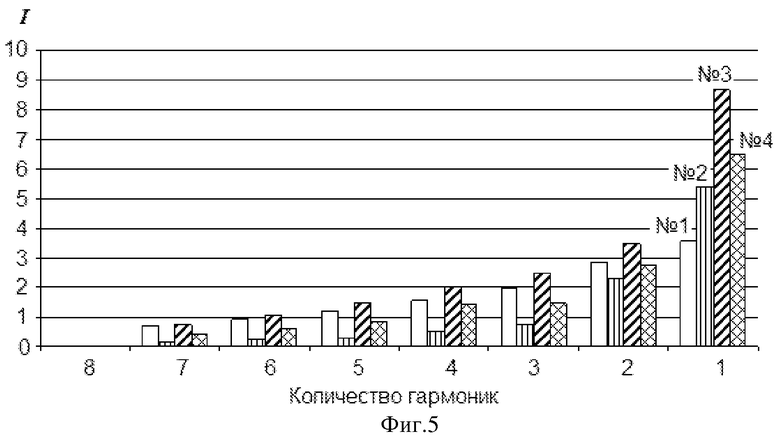
фиг. 5 - график зависимости величины интегральной составляющей от количества гармоник для пассажирского судна прибрежного плавания для различных условий плавания;
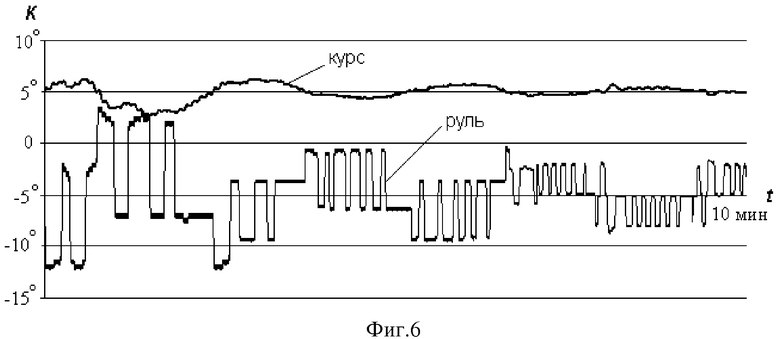
фиг. 6 - график, иллюстрирующий адаптацию судна типа траулер на курсе 10 град при резком изменении скорости ветра и высоты волны с помощью ИСАУ судном по курсу, показанной на фиг. 1.
Настоящее изобретение поясняется на примере варианта осуществления интеллектуальной системы автоматического управления (ИСАУ) судном по курсу.
Как показано на фиг. 1, ИСАУ судном по курсу в соответствии с вариантом осуществления настоящего изобретения в общем случае включает судно в качестве объекта управления (ОУ) 1, регулятор на нечеткой логике (РНЛ) 2 и нейросетевой эмулятор (НСЭ) 3.
ОУ 1 в частности оборудован средством кладки пера руля для его кладки под углом α (например, рулевая машина), средством задания значения курса KЗ (например, задатчик курса) и средствами определения данных движения судна по курсу (например, гирокомпас, лаг), таких как действительное значение курса K и значение линейной скорости движения судна, которые включают в вектор данных действительного курса судна Vy.
РНЛ 2 служит для выработки управляющего воздействия (α) на средство кладки пера руля судна в соответствии с принятым алгоритмом управления, построенным на базе нечеткой логики, и заданным качеством управления на основе входных данных в виде ошибки управления e, и параметров РНЛ 2, настраиваемых с помощью НСЭ 3. Здесь, ошибку управления e определяют как отклонение между действительным значением курса K, полученным от средств определения данных движения судна по курсу, и заданным значением курса KЗ, полученным от средства задания значения курса.
НСЭ 3 служит для настройки настраиваемых параметров РНЛ 2 путем определения вектора настраиваемых параметров Vr на базе вектора данных управляющих воздействий Vα, полученных с выхода РНЛ 2, и вектора данных действительного курса судна Vy, полученных от средств определения данных движения судна по курсу.
В этом примере НСЭ 3 включает в себя следующие блоки: нейросетевой классификатор (НСК) 4, нейросетевую модель объекта управления (НСМ ОУ) 5 и блок оптимизации (БО) 6. Устройство и принцип действия блоков 3-6 будет пояснено ниже.
Предлагаемая ИСАУ судном по курсу предусматривает последовательную реализацию следующих основных режимов: подготовки данных, обучения нейронных сетей НСЭ 3, функционирования.
Режим подготовки данных
Режим подготовки данных о курсе судна состоит из трех связанных процессов: формирование исходных векторов данных, идентификация исходных векторов данных и создание рабочих массивов данных.
Формирование исходных векторов данных Vα и Vy происходит по следующей схеме: данные о курсе судна собираются с помощью входного интерфейса в исходные векторы, каждый из которых представляет собой совокупность данных движения судна по курсу, данных о скорости рыскания, кладках пера руля, скорости перекладок пера руля, средней скорости движения судна.
Идентификация исходных векторов данных о характеристиках рыскания судна заключается в присвоении им идентификационных меток Pj. Идентификационные метки соответствуют уникальным свойствам этих векторов. Процесс идентификации векторов Vα и Vy заключается в осуществлении соответствующих вычислений над их элементами в блоке НСК 4. Здесь, физическими принципами идентификации исходных векторов данных являются анализ спектра данных, полученного с помощью дискретного преобразования Фурье, и измерение статистических характеристик сигнала с ОУ 1.
Процесс создания рабочих массивов данных о курсе судна состоит в постановке соответствия каждому сформированному в долговременной памяти базы знаний, которая обеспечена в НСК 4, исходному вектору данных действительного курса судна Yj вектора идентификационных меток Pj. В результате этого образуется рабочий массив данных о поведении судна по курсу {Y, P}j, после чего над ними производят дальнейшие операции, такие как обучение и/или обработку, в зависимости от режима работы ИСАУ судном по курсу. Массив представляет собой базу знаний, созданную для того, чтобы в будущем, при появлении таких же или близких по статистическим признакам характеристик поведения судна по курсу, по вектору идентификационных меток Pj выбирать готовую (т.е. обученную) НС в качестве нейросетевой модели судна в блоке НСМ ОУ 5 по полученному с помощью НСК 4 вектору критериальных признаков движения судна VA для дальнейшего определения с помощью БО 6 параметров, в виде вектора настраиваемых параметров регулятора Vr для настройки РНЛ 2, которые соответствуют выбранной нейросетевой модели судна.
Режим обучения
В режиме обучения осуществляют изменение весовых коэффициентов матриц связей НС определенной архитектуры, сформированной заранее с функцией активации. Целью обучения является настройка нейронной сетью НСМ ОУ 5 весовых коэффициентов wjq своей матрицы связей W в виде вектора параметров нейронной сети (НС) между входным Xj и выходным Yj векторами данных НС для определяемого множества всех возможных комбинаций вектора меток Pj, что достигается путем поиска наилучших характеристик используемой архитектуры НС: алгоритма обучения данных, алгоритма обработки данных движения судна по курсу, числа слоев НС, числа нейронов в каждом слое НС.
После обучения НС, любой входной вектор Xj, принадлежащий множеству обучающих пар, но не совпадающий с его значениями, будет соответствовать выходному вектору Yj однозначно. Таким образом, обученные НС готовы для обработки данных движения судна по курсу.
Режим функционирования
При движении судна ИСАУ судном по курсу собирает данные векторов Vα и Vy, в частности по таким сигналам, как значения угла рыскания судна, скорость изменения этого угла, число перекладок руля, скорость изменения кладок пера руля. Затем происходит спектральный анализ этих векторов Vα и Vy с выделением нескольких гармоник для каждого из вышеуказанных сигналов, плюс к данным вектора Vy добавляют значение линейной скорости движения судна, полученных от средств определения данных движения судна по курсу, за счет чего получают данные движения судна по курсу при текущих внешних воздействиях F. Собранные данные в виде векторов Vα и Vy подают на вход НСК 4, который по данным этих векторов определяет, какая из имеющихся в НСМ ОУ 5 нейронных сетей по статистическим данным более всего подходит под эти данные, после чего загружает наиболее подходящую НС в НСМ ОУ 5 в качестве нейросетевой модели судна. По выбранной нейросетевой модели судна БО 6 загружает соответствующие этой модели оптимальные параметры РНЛ 2 в виде вектора Vr. Т.о. основной задачей БО 6 является настройка РНЛ 2 по нейросетевой модели судна НСМ ОУ 5, выбранной с помощью НСК 4, при текущих внешних воздействиях F, т.е. при конкретных эксплуатационных и погодных условиях движения судна по курсу.
Далее, принцип действия и принципы синтеза отдельных элементов ИСАУ судном по курсу будут пояснены более подробно с использованием примеров.
РНЛ 2 функционально представляет собой набор лингвистических условных операторов или нечетких ассоциаций, определяющих конкретные ситуации управления судном по курсу. Здесь в РНЛ 2 используются следующие параметры: К - сигнал на выходе (фактический курс судна); КЗ - сигнал на входе (заданный курс судна); е - отклонение между заданным и фактическим судном по курсу; е? - скорость изменения ошибки e (скорость ухода судна с курса); u - выход регулятора.
Две нечеткие переменные e и е? представлены в виде девяти нечетких подмножеств: от нулевого значения ZE до высокого положительного значения PL и высокого отрицательного, как представлено в таблице 1.
Таблица 1
Матрица нечетких ассоциаций управления курсом судна
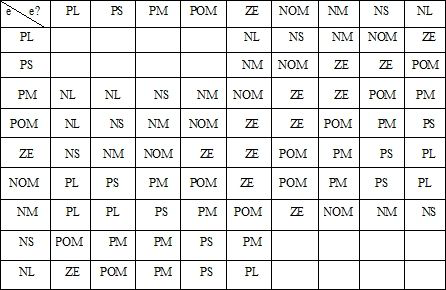
Представленная в таблице 1 матрица нечетких ассоциаций (правил) для ИСАУ судном по курсу составлена на основании экспертных суждений, где каждая группа элементов в матрице дает одну нечеткую ассоциацию (правило), которая указывает, как следует изменить переменную управления u для наблюдаемых величин входных нечетких переменных е и е?.
В качестве примера приведем интерпретацию правила (PL, ZE, PL) на естественном языке. Если ошибка e между заданным и фактическим значениями курса КЗ и К является положительной и большой, а скорость изменения ошибки е? близка к нулю, то сигнал управления (управляющее воздействие) в рулевую машину должен быть максимальным.
Здесь, для нечетких подмножеств матрицы нечетких ассоциаций двух нечетких переменных е и е? выбраны функция Гаусса и сигмовидная функция принадлежности.
Нечеткое подмножество нечетких переменных ZE (значения, близкие к нулю) выбирают более узкими, чем другие. Это позволяет повысить точность управления вблизи заданного значения курса КЗ и повысить робастность ИСАУ судном по курсу.
Исходя из априори эвристических соображений, было принято, что непрерывные нечеткие подмножества в каждом из наборов перекрываются примерно на 20-30% процентов. При слишком большом перекрытии теряются различия между величинами, соответствующими разным подмножествам. При слишком малом перекрытии возникает тенденция к «двухзначному» управлению, что приводит к ухудшению качества процесса (неоднозначность решения, большое перерегулирование и т.д.). В реальных условиях перекрытия позволяют сглаживать переход от одного управляющего воздействия к другому в процессе работы ИСАУ судном по курсу.
Вычисление параметров функционирования РНЛ 2 можно представить в виде следующего алгоритма:
- просчитать (измерить) выходную величину процесса у(t) (т.е. зависимость К от времени);
- вычислить ошибку e(t) и скорость изменения ошибки е?(t) для момента времени t;
- провести формирование соответствующих нечетких подмножеств путем квантования величин e(t) и е?(t);
- вычислить на основе сформированных функций принадлежности степени принадлежности ошибки и производной ошибки M(ei) и M(e?i);
- активизировать из матрицы правил заключения со степенями принадлежности  , вычисляемыми по степеням принадлежности посылок M(ei) и M(e?i) с помощью нечеткой логической операции «И»;
, вычисляемыми по степеням принадлежности посылок M(ei) и M(e?i) с помощью нечеткой логической операции «И»;
- «срезать» величину  до величины
до величины  методом кодирования по минимуму корреляции;
методом кодирования по минимуму корреляции;
- вычислить действительную выходную степень принадлежности  путем выполнения нечеткой логической операции «ИЛИ» между значениями
путем выполнения нечеткой логической операции «ИЛИ» между значениями  - всех активизированных заключений;
- всех активизированных заключений;
- определить выход нечеткого регулятора u дискретным аналогом центроидного метода.
Т.е. здесь может быть применен упрощенный алгоритм нечеткого вывода по следующей форме записи предикатных правил: Пi: если e есть ai1 и е? есть ai2, тогда с=zi, где zi - вещественные числа, aij - нечеткие числа из функций Гаусса и сигмоидальных функций.
При реализации РНЛ 2, в качестве алгоритма поиска оптимальных значений настраиваемых параметров, т.е. параметров предикатных правил, с помощью БО 6 предпочтительным является применение в БО 6 генетического алгоритма, который позволяет избежать остановку алгоритма на локальном экстремуме и не зависеть от размерности задачи. Оценку вышеуказанных параметров РНЛ 2 следует проводить по значению целевой функции, которая, как один из вариантов, может отражать минимум среднеквадратичной ошибки (СКО).
Ниже кратко приведен пример генетического алгоритма, реализуемого с помощью БО 6 и позволяющего определить данные вектора настраиваемых параметров Vr на базе данных вектора параметров нейронной сети W, полученных с помощью НСМ ОУ 5.
Операция 10. Генерирование случайным образом 54 настраиваемых параметров РНЛ 2 с 50% равномерным распределением относительно стартового значения для десяти возможных вариантов настройки.
Операция 20. Определение критерия эффективности управления для каждого варианта настройки РНЛ 2 на нейросетевой модели судна по данным вектора W.
Операция 30. Усиление критериев вариантов настройки РНЛ, превышающих средний показатель критерия с помощью β>1; ослабление критериев вариантов настройки РНЛ 2, имеющих значение ниже среднего критерия, с помощью 0<β<1, с использованием следующих формул:
 , где n=720;
, где n=720;
Kср= ;
;
 =Ki (Ki - Kcp)β, если Ki>Kcp;
=Ki (Ki - Kcp)β, если Ki>Kcp;
 =Ki (Ki · Kcp)β, если Ki<Kcp.
=Ki (Ki · Kcp)β, если Ki<Kcp.
Операция 40. Выбор случайным образом в зависимости от величины критериев десяти вариантов настройки РНЛ.
Операция 50. Смешивание случайным образом между собой соответствующих параметров выбранных вариантов настройки РНЛ 2. Повторение операций 20-40 до тех пор, пока все критерии не станут равными между собой или параметры РНЛ 2 для всех десяти вариантов не станут одинаковыми.
Операция 60. Проведение процесса мутации, который заключается в стохастическом изменении части хромосом. При этом каждый ген строки, которая подвергается мутации, с некоторой малой вероятностью меняется на другой ген. При двоичном кодировании в процессе мутации значения отдельных битов меняются на противоположные.
Операция 70. После получения квазиоптимального решения (выхода из операций 20-40), решение утоняется методом случайного поиска с использованием процедуры адаптации распределения шага поиска:
- изменение направления поиска с учетом предыстории поиска по зависимости
 ,
,
где i= - количество параметров настройки, k - шаг итерации,
- количество параметров настройки, k - шаг итерации,  - оптимальное значение вектора,
- оптимальное значение вектора,  , 0<B2<B1<1 - коэффициенты учета предыстории;
, 0<B2<B1<1 - коэффициенты учета предыстории;
- изменение величины случайного шага (процедура позволяет уменьшить величину случайного шага (дисперсию) по мере приближения к точке оптимума).
В зависимости от информации, получаемой в процессе поиска на каждой итерации, определяется значение х0, минимизирующее целевую функцию:
 ,
,
где генерируются случайные значения параметров настройки с учетом вероятности
P(x)=exp[-(x-x0)/2σ2], где
 ,
,
где 0<g<1, g - параметр, определяющий уменьшение дисперсии при неудачном шаге.
Таким образом, происходит локализация поиска в окрестности оптимальной точки. Условием окончания этапа является  - отношение текущей дисперсии к первоначальной.
- отношение текущей дисперсии к первоначальной.
Данные вектора параметров нейронной сети W в качестве входных данных для вышеописанного генетического алгоритма получают от блока НСМ ОУ 5 по нейросетевой модели судна, выбранной на базе данных вектора критериальных признаков движения судна VА, определенных с помощью НСК 4.
Используемые в НСМ ОУ 5 нейросетевые модели судна были получены с помощью имитатора ИС-2005 ЗАО «Инженерный центр информационных и управляющих систем». С помощью этого имитатора моделировалось шесть различных моделей судов (пассажирское судно прибрежного плавания (ПСПП), траулер, транспортный рефрижератор (ТР), автомобильно-пассажирское судно (АПП), танкер, супертанкер (СТ)), характеристики которых приведены в таблице 2.
Таблица 2
Характеристики судов
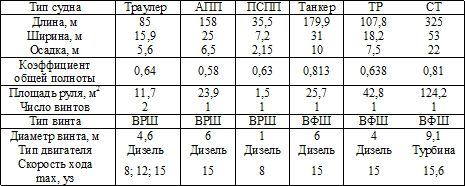
В таблице 2 использованы следующие сокращения: ВФШ - гребной винт фиксированного шага; ВРШ - гребной винт регулируемого шага.
Для каждого из судов было проведено имитационное моделирование следующих условий плавания при скорости хода 8,0-15,6 узлов: №1 - скорость ветра 1-2 м/с, высота волны 3% обеспеченности 0,25 м; №2 - скорость ветра 2-5 м/с, высота волны 0,85 м; №3 - скорость ветра 5-8 м/с, высота волны 1,25 м; №4 - скорость ветра 8-10 м/с, высота волны 1,25. Для каждой из траекторий движения судна при различных эксплуатационных факторах было обучено 79 нейронных сетей, отличающихся типом, архитектурой и алгоритмом обучения.
По результатам оценки СКО были выбраны восемь НС, которые позволяют получать качественные нейросетевые модели судов для всех исследуемых эксплуатационных условий (см. фиг. 2). На фиг. 2 использованы следующие обозначения выбранных НС: I-III - нейронные сети прямого распространения с алгоритмом обучения Левенберга-Марквардта; IV - нейронная сеть прямого распространения с алгоритмом обучения Моллера (комбинация метода сопряженного градиента с квазиньютоновским подходом); V-VII - рекуррентные нейронные сети Элмана с алгоритмом обучения Левенберга-Марквардта, VIII - рекуррентная нейронная сеть Элмана с алгоритмом обучения Моллера. Для всех типов НС производилось 100, 500 и 1000 циклов обучения.
Анализ результатов моделирования показал, что в качестве нейросетевой модели судна предпочтительнее использовать нейронную сеть прямого распространения с алгоритмом обучения Левенберга-Марквардта.
Также было проведено компьютерное моделирование для определения зависимости СКО обучения нейронных сетей от вышеприведенных условий плавания для различных судов, характеристики которых представлены выше в таблице 2. Анализ результатов моделирования показал, что СКО обучения нейронных сетей практически не изменяется. Например, как показано на фиг. 3, СКО обучения нейронных сетей для траулера при скорости хода 8, 12 и 15 узлов меняется незначительно. Это лишний раз подтверждает возможность использования теории нейронных сетей в качестве нейросетевой модели движения судна по курсу для блока НСМ ОУ 5. Анализ результатов моделирования показал, что в связи с ухудшением условий плавания (увеличение скорости ветра от 1-2 до 8-10 м/с, увеличение высоты волны с 0,25 м до 1,25 м) для ТР (15 узлов), танкера (15 узлов), ПСПП (8 узлов), АПП (15 узлов), СТ (15, 6 узлов) величины СКО обучения НС возрастают, однако остаются в целом незначительными.
Дополнительно, было проведено компьютерное моделирование для определения зависимости СКО обучения нейронных сетей от типов судов, характеристики которых представлены в таблице 2. Анализ результатов моделирования показал, что СКО обучения НС, моделирующих движение судов по курсу, не имеют характерных зависимостей.
Т.о. различные суда в различные условия плавания требуют различные нейросетевые модели, моделирующие движение судна по курсу.
Для определения достаточного количества циклов обучения нейронных сетей, моделирующих движение судна по курсу, было проведено дополнительное исследование. Нейронные сети, из числа вышеописанных, выбирались наилучшие для конкретного судна в указанных условиях плавания. Например, на фиг. 4 приведен график снижения СКО обучения НС для шести судов, характеристики которых приведены в таблице 2.1, при условиях плавания №1, анализ которого показывает, что для всех шести судов значительное снижение СКО обучения происходит до 400 цикла обучения, затем происходит незначительная адаптация. Аналогично было определено, что значительными являются количество циклов обучения 450 (для судов при условиях №2), 350 (для судов при условиях №3) и 300 (для судов при условиях №4). Также, анализ результатов моделирования для различных судов в различных условиях плавания показал, что значительными являются количество циклов обучения 300 (для судов типа танкер и траулер), 350 (для судов типа АПП и ПСПП) и 450 (для судов типа СТ и ТР). Таким образом, анализ проведенных исследований показал, что для различных судов и разных условий плавания достаточно 450 циклов обучения нейронной сети любого типа.
Данные вектора критериальных признаков движения судна VА в качестве входных данных для выбора и загрузки оптимальной нейросетвой модели судна из нескольких моделей, например, вышеописанных моделей, в блок НСМ ОУ 5, получают от НСК 4 по данным обратной связи в виде вектора данных действительного курса судна Vy и вектора данных управляющих воздействий Vα.
Для выявления особенностей поведения судна по курсу (особенности влияния изменения кладок пера руля, погодных факторов и т.п.) в НСК 4 используется спектральный анализ кривой движения судна по курсу (вектор Vy) при соответствующей кривой команд изменения положения пера руля (вектор Vα). Для проведения спектрального анализа использовалось дискретное преобразование Фурье.
Для исследования и выявления достаточного количества гармоник для спектрального анализа был разработан алгоритм специального модуля НСК 4 для восстановления кривой движения судна до восьми гармоник, и определяющего соответствующую им интегральную составляющую по остальным гармоникам. Для каждой модели судна, после проведения спектрального анализа и получения восьми максимальных гармоник, рассчитывается интегральный критерий I возможности использования меньшего количества гармоник для идентификации нейросетевой модели судна в базе знаний НСК 4. Здесь, основной сигнал Y1 состоит из суммы восьми составляющих, а сравниваемый сигнал Y2 состоит из суммы исследуемого количества составляющих:
 ;
;
 ;
;
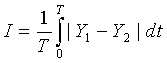 ,
,
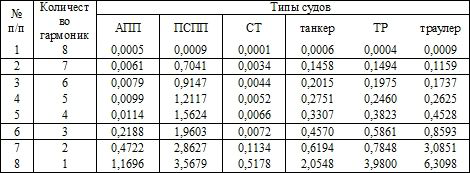
где  ; ω - наименьшая частота из заданных гармоник; N - количество введенных гармоник. В таблице 3 приведены значения интегральных составляющих относительно количества гармоник для всех типов судов, приведенных в таблице 2.
; ω - наименьшая частота из заданных гармоник; N - количество введенных гармоник. В таблице 3 приведены значения интегральных составляющих относительно количества гармоник для всех типов судов, приведенных в таблице 2.
Таблица 3
Значения интегральных составляющих
После проведения компьютерного моделировании на имитаторе ИС-2005 с моделями шести судов при четырех различных погодных условиях и проведения дискретного преобразования Фурье были получены векторы меток, характеризующие коэффициенты амплитуд восьми основных гармоник при изменении значений курса судна, угловой скорости рыскания, угла кладки руля и средней линейной скорости (всего 65 элементов для каждого вектора). Анализ полученных данных показал ярко выраженную зависимость интегральной составляющей ошибки I от количества гармоник при моделировании движения судна. Если для крупнотоннажных судов можно ограничиться двумя-тремя гармониками, то для судов малого водоизмещения необходимы восемь гармоник. Также из анализа полученных результатов был сделан вывод об изменении спектральной характеристики моделей судов при смене погодных условий, что особенно характерно для малотоннажных судов типа ПСПП и траулер. Например, на фиг. 5 представлен график зависимости величины интегральной составляющей I от количества гармоник для АПП для различных условий плавания (№1-4, описанные выше). Проведенные исследования для всех рассматриваемых моделей судов показали, что погрешность моделирования различных типов судов по-разному зависит от количества участвующих гармоник. Если у малотоннажных судов наблюдается почти линейная зависимость, то у более инерционных крупнотоннажных судов - нелинейная, поэтому возможно использование меньшего количества гармоник.
Для классификации кривых движения судов по критериальным признакам, таким как спектральные характеристики, предпочтительным является использование нейронных сетей с радиально-базисными функциями активации (РБФ).
Для обучения НС РБФ были использованы 96 примеров. Данные считывались из файлов, масштабировались и заносились в массив.
Далее выполнялась кластеризация по методу «k-средних» каждого из классов на шесть кластеров с использование функции “kmeans”, т.о. в каждом кластере оказалось по 24 объекта. Векторы центроидов кластеров заносились в специальный массив. Следующим шагом было определение отклонений гауссовой функции для каждого центроида кластеров, для чего применяли наиболее точный и эффективный метод «k-ближайших соседей». Радиус колокола каждого ядра рассчитывали как средняя дистанция до k=3 (опытным путем было установлено, что ошибка сети наименьшая при k=3) ближайших соседних центроидов и записывался в массив. Результатом подобного обучения являются весовые коэффициенты - векторы центроидов и пороговые уровни слоя - отклонения из массива. В результате были получены отклики функций Гаусса для каждого из шести типов судов. Итогом проведенных экспериментов и обучения НСК 4 стала база знаний на 24 нейросетевые модели движения различных судов при различных условиях плавания.
Проверка работоспособности методов и алгоритмов, синтезированных по описанным выше принципам, проводилась в два этапа. Первый этап заключался в проведении компьютерного моделирования для наполнения базы знаний НСК 4 моделями судов при различных условиях плавания. Второй этап заключался в проведении имитационного моделирования с использованием имитатора ИС-2005 для модели судна определенного типа, при различных скоростях движения и изменении условий плавания с целью проверки процесса адаптации РНЛ 2.
Компьютерное моделирование проводились для четырех условий внешних воздействий, обозначенных выше как №1-4. Анализ результатов показал, что НСЭ 3 требует дополнительной настройки при плохих погодных условиях, что подтверждает обоснованность включения в его архитектуру НСК 4 с базой знаний НС с наилучшей идентификацией движения судна по курсу при различных условиях плавания (в частности, №1-4). Проведенная НСЭ 3 адаптация РНЛ 2 за счет настройки параметров последнего приводила к новым значения настраиваемых параметров РНЛ 2.
После проведения серии экспериментов моделирования в базе знаний НСК 4 были сохранены соответствующие различным условиям нейросетевые модели, например, было сохранено 12 нейросетевых моделей траулера для различных погодных условий и различной скорости движения. В качестве примера на фиг. 6 показан процесс адаптации для судна типа траулер при резком изменении погоды, в частности от условий плавания №1 до условий плавания №4, за счет выбора оптимальных из числа сохраненных нейросетевых моделей. Анализ данных адаптации показывает, что среднеквадратический интегральный критерий отклонения судна от курса уменьшился с 2,43 (за первые три минуты) до 0,16 (за последние 3 минуты), причем оптимизация этого критерия проходила при условии обеспечения работы рулевой машины не более 2/3 исследуемого периода, что значительно превосходит соответствующие показатели известных аналогов (например, по техническим решениям RU 2359308 C2 и CN 102183957 A, описанным выше).
При адаптации РНЛ 2 возможны и другие целевые функции, позволяющие минимизировать нагрузку на рулевую машину при соблюдении условия качественного удержания судна на курсе. Например, если ослабить требования времени работы до 1/2, то нагрузка на рулевую машину уменьшится, сократится время работы рулевой машины, но несколько ухудшится качество удержания судна на курсе, при этом интегральный критерий в этом случае составит 0,31, что все равно позволяет значительно превосходить характеристики известных аналогов.
Следует понимать, что приведенные выше примеры использованы только для целей иллюстрации возможности осуществления настоящего изобретения и ряда его преимуществ, и эти примеры не ограничивают объем правовой охраны, представленный в формуле изобретения, при этом специалист в этой области относительно просто способен осуществить и другие варианты изобретения без отхода от сущности изобретения в рамках объема правовой охраны.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ КУРСОМ СУДНА | 2007 |
|
RU2359308C2 |
| СПОСОБ И СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ СУДНА С ПОМОЩЬЮ НЕЧЕТКОЙ ЛОГИКИ | 2018 |
|
RU2678762C1 |
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБЖИГА ИЗВЕСТНЯКА В ПЕЧАХ ШАХТНОГО ТИПА | 2009 |
|
RU2445668C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ СО ВСТРОЕННОЙ НЕЙРОСЕТЬЮ | 2024 |
|
RU2828993C1 |
| СПОСОБ КОНТРОЛЯ ЭКСТРЕМАЛЬНЫХ СИТУАЦИЙ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ СРЕДЫ | 2015 |
|
RU2589367C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ МНОГОРЕЖИМНОЙ ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ РАСПРЕДЕЛЕННОЙ СРЕДОЙ МЯГКИХ ВЫЧИСЛЕНИЙ | 2014 |
|
RU2596992C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ МОРСКИХ СУДОВ | 2017 |
|
RU2672236C2 |
| СПОСОБ КОНТРОЛЯ ПРОЧНОСТИ И ВИБРАЦИИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2363935C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ОБЪЕКТА И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ МОБИЛЬНОГО ОБЪЕКТА | 2009 |
|
RU2451593C2 |
| Система обнаружения и классификации морских целей с использованием математической модели определения типа цели | 2020 |
|
RU2726992C1 |

Группа изобретений относится к способу автоматического управления судном по курсу и интеллектуальной системе автоматического управления судном по курсу. Способ заключается в том, что в качестве модели объекта управления используют нейросетевую модель объекта управления. Для настройки настраиваемых параметров алгоритма нечеткой логики получают и идентифицируют данные движения судна по курсу и данные управляющих воздействий, определяют данные критериальных признаков движения судна по идентифицированным данным движения судна по курсу и данным управляющих воздействий с использованием базы знаний поведения судна по курсу, выбирают нейросетевую модель объекта управления на базе определенных данных критериальных признаков движения судна, определяют данные настраиваемых параметров алгоритма нечеткой логики в соответствии с выбранной нейросетевой моделью объекта управления. Интеллектуальная система содержит регулятор на нечеткой логике, эмулятор для корректировки управляющего воздействия, прямые и обратные связи между объектом управления, регулятором на нечеткой логике и эмулятором. Эмулятор выполнен в виде нейросетевого эмулятора. Нейросетевой эмулятор включает нейросетевой классификатор, блок нейросетевой модели объекта управления и блок оптимизации. Нейросетевой классификатор содержит базу знаний поведения судна по курсу. Технический результат заключается в обеспечении высокого быстродействия процессов управления и эффективной фильтрации случайных возмущений системы. 2 н. и 12 з.п. ф-лы, 6 ил., 3 табл.
1. Способ автоматического управления судном по курсу, включающий следующие операции, задают значение курса судна как объекта управления, определяют по данным обратной связи с объектом управления данные ошибки управления как отклонение между действительным и заданным значениями курса, определяют управляющее воздействие в виде данных угла кладки пера руля судна по данным ошибки управления с использованием алгоритма нечеткой логики с набором нечетких правил, идентифицируют модель объекта управления на базе сетевой структуры по данным обратной связи, и корректируют управляющее воздействие в соответствии с идентифицированной моделью объекта управления, при этом корректировку управляющего воздействия осуществляют за счет настройки настраиваемых параметров алгоритма нечеткой логики, отличающийся тем, что в качестве модели объекта управления используют нейросетевую модель объекта управления, при этом для настройки настраиваемых параметров алгоритма нечеткой логики выполняют следующие операции получают и идентифицируют данные движения судна по курсу и данные управляющих воздействий, идентифицируют данные движения судна по курсу и данные управляющих воздействий и определяют данные критериальных признаков движения судна по идентифицированным данным движения судна по курсу и данным управляющих воздействий с использованием базы знаний поведения судна по курсу, выбирают нейросетевую модель объекта управления на базе определенных данных критериальных признаков движения судна, определяют данные настраиваемых параметров алгоритма нечеткой логики в соответствии с выбранной нейросетевой моделью объекта управления.
2. Способ по п.1, отличающийся тем, что в данные обратной связи для обработки с использованием алгоритма нечеткой логики включают, по крайней мере, данные управляющих воздействий и данные действительного значения курса.
3. Способ по п.2, отличающийся тем, что в данные обратной связи для обработки с использованием алгоритма нечеткой логики дополнительно включают значение действительной линейной скорости судна.
4. Способ по п.2, отличающийся тем, что в данные обратной связи для обработки с использованием алгоритма нечеткой логики включают данные, которые выбирают из группы: значение угла кладки руля, значение угла рыскания судна, скорость изменения угла рыскания судна, число перекладок руля и/или скорость изменения кладок пера руля.
5. Способ по п.1, отличающийся тем, что идентификацию полученных данных движения судна по курсу и данных управляющих воздействий проводят с помощью анализа спектра этих данных с использованием дискретного преобразования Фурье.
6. Способ по п.5, отличающийся тем, что при анализе спектра данных движения судна по курсу и данных управляющих воздействий используют от двух до восьми гармоник спектра.
7. Способ по п.5, отличающийся тем, что базу знаний поведения судна по курсу создают и обучают с использованием нейронной сети с радиально-базисными функциями активации.
8. Способ по п.1, отличающийся тем, что нейросетевую модель объекта управления выбирают из нескольких нейросетевых моделей управления из группы: нейронные сети прямого распространения с алгоритмом обучения Левенберга-Марквардта, нейронная сеть прямого распространения с алгоритмом обучения Моллера, рекуррентные нейронные сети Элмана с алгоритмом обучения Левенберга-Марквардта и/или рекуррентная Нейронная сеть Элмана с алгоритмом обучения Моллера.
9. Способ по п.8, отличающийся тем, что в качестве нейросетевой модели объекта управления используют нейронную сеть прямого распространения с алгоритмом обучения Левенберга-Марквардта.
10. Способ по п.1, отличающийся тем, что данные настраиваемых параметров алгоритма нечеткой логики определяют с помощью генетического алгоритма.
11. Способ по п.1, отличающийся тем, что используют алгоритм нечеткой логики в виде набора лингвистических условных операторов, определяющих конкретные ситуации управления судном по курсу, которые предварительно определяют на основании экспертных суждений по двум нечетким переменным, в качестве которых используют данные ошибки управления и данные скорости изменения ошибки управления.
12. Способ по п.11, отличающийся тем, что лингвистические условные операторы формируют в матрицу с использованием функции Гаусса и сигмовидной функции принадлежности.
13. Интеллектуальная система автоматического управления судном по курсу, включающая судно как объект управления, регулятор на нечеткой логике для определения управляющего воздействия на объект управления по ошибке управления, как отклонению между действительным и заданным значениями курса, установленный в прямом контуре системы, эмулятор для корректировки управляющего воздействия за счет идентификации модели объекта управления на базе сетевой структуры по данным обратной связи, прямые и обратные связи между объектом управления, регулятором на нечеткой логике и эмулятором, входящие в прямой и обратный контуры системы, соответственно, отличающаяся тем, что эмулятор установлен в обратном контуре системы и выполнен в виде нейросетевого эмулятора, в котором в качестве модели объекта управления использована нейросетевая модель управления, и который выполнен с возможностью настройки настраиваемых параметров регулятора на нечеткой логике по данным обратной связи, где нейросетевой эмулятор включает нейросетевой классификатор, блок нейросетевой модели объекта управления и блок оптимизации, при этом нейросетевой классификатор содержит базу знаний поведения судна по курсу для определения критериальных признаков движения судна по данным движения судна по курсу и данным управляющих воздействий, вход нейросетевого классификатора является входом нейросетевого эмулятора для получения данных движения судна по курсу и данных управляющих воздействий от объекта управления и регулятора на нечеткой логике, соответственно, выход нейросетевого классификатора соединен со входом блока нейросетевой модели объекта управления для передачи данных критериальных признаков движения судна, определенных нейросетевым классификатором по данным движения судна по курсу и данным управляющих воздействий, выход блока нейросетевой модели объекта управления соединен со входом блока оптимизации для передачи данных параметров нейронной сети, соответствующих нейросетевой модели объекта управления, загруженной в блок нейросетевой модели объекта управления на базе данных критериальных признаков движения судна, выход блока оптимизации является выходом нейросетевого эмулятора для передачи на один из входов регулятора на нечеткой логике данных настраиваемых параметров регулятора на нечеткой логике, определенных блоком оптимизации по загруженной в него нейросетевой модели объекта управления.
14. Система по п.13, отличающаяся тем, что судно оборудовано средством кладки пера руля, средством задания значения курса и средствами определения данных движения судна по курсу, при этом один вход регулятора на нечеткой логике соединен с выходами средства задания значения курса и средств определения данных движения судна по курсу для получения данных ошибки управления, другой вход регулятора на нечеткой логике соединен с выходом нейросетевого эмулятора для получения данных настраиваемых параметров регулятора на нечеткой логике, выход регулятора на нечеткой логике соединен со входом средства кладки пера руля для передачи данных управляющего воздействия, один вход нейросетевого эмулятора соединен с выходом средств определения данных движения судна по курсу для получения данных движения судна по курсу, другой вход нейросетевого эмулятора соединен с выходом регулятора на нечеткой логике для получения данных управляющих воздействий.
| CN 102183957 A, 14.09.2011 | |||
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ КУРСОМ СУДНА | 2007 |
|
RU2359308C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ | 2002 |
|
RU2251721C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| US 6611737 B1, 26.08.2003 | |||

