Изобретение относится к области авиационной техники, в частности к авиационному оборудованию, и может быть использовано для интеллектуальной поддержки ведущего (ВДЩ) и ведомого (ВДМ) пары истребителей М в процессе ведения дальнего воздушного боя с парой истребителей противника N (дальний воздушный бой M×N при max(M,N)≤2; далее ДВБ M×N) при всех возникающих в процессе боя его конфигурациях, при любой текущей фазе атаки каждого истребителя противника и при наличии на всех противоборствующих истребителях возможности вести только одноцелевой обстрел.
Конфигурация ДВБ M×N определяется числом действующих (в текущий момент боя) самолетов в противоборствующих парах: в каждой паре по два самолета - конфигурация боя (2×2); в паре М два самолета, а в паре N остался один самолет - конфигурация боя (2×1); в паре М остался один самолет, а в паре N два самолета - конфигурация боя (1×2); в каждой паре осталось по одному самолету - конфигурация боя (1×1).
Известен способ интеллектуальной поддержки летчиков истребителей в дуэльной ситуации дальнего воздушного боя двух противоборствующих истребителей (ДВБ 1×1), заключающийся в активации одной из проблемной субситуации (ПрС/С) из оперативной базы знаний дальнего воздушного боя 1×1 истребителя (И1) с истребителем противника (И2), и выработки рекомендации летчику по способу решения этих ПрС/С, при этом дуэльная ситуация начинается в оговоренных условиях и продолжается с одним и тем же истребителем противника (начальная и последующие конфигурации ДВБ 1×1 [1].
Известна базовая бортовая оперативно - советующая система для дуэльной ситуации дальнего воздушного боя [1]. Система содержит базу знаний дальнего воздушного боя 1×1 истребителя (И1) с истребителем противника (И2), в котором возможны следующие проблемные субситуации: «Занятие истребителем тактически выгодного положения» («ТВП»), «Нападение», «Защита с нападением», «Защита». В указанной системе вырабатываются оперативные рекомендации летчику по способу решения этих ПрС/С.
К недостаткам известного аналога можно отнести то, что система не охватывает все текущие конфигурации в дальнем воздушном бою пар истребителей, при котором условия возникновения дуэльных ситуаций меняются в зависимости от конфигурации боя, действий напарника и каждого истребителя пары противника. Кроме того, в бою пар истребителей начавшаяся дуэльная ситуация может прерваться для оказания помощи напарнику или может возникнуть необходимость оперативно изменить выполняемый тактический прием боя и/или реализуемый вариант целераспределения.
Известен способ интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, заключающийся в обмене информацией истребителями при полете в составе пары о нахождении в одной из ситуаций в атаке или в отражении атаки истребителей противника, координат и вектора скорости своего самолета, координат и вектора скоростей наблюдаемых самолетов пары противника, определении конфигурации дальнего воздушного боя (ДВБ) на основе анализа числа действующих (в текущий момент боя) самолетов в противоборствующих парах: в каждой паре по два самолета - конфигурация боя (2×2); в паре М два самолета, а в паре N остался один самолет - конфигурация боя (2×1); в паре М остался один самолет, а в паре N два самолета - конфигурация боя (1×2); в каждой паре осталось по одному самолету - конфигурация боя (1×1), выдачи рекомендаций при решении задачи в субситуации «Тактический прием» на основе выбора в базе знаний набора тактических приемов по прецеденту, при этом процедуру вычисления координат ситуационного вектора осуществляют на основе текущей информации, осуществляют выбор рекомендуемого прецедента по полученному ситуационному вектору в процедурной матрице знаний этой ситуации на основе расчета приоритетов всех включенных в матрицу знаний прецедентов и выбора прецедента с наибольшим приоритетом, выдачи рекомендаций при решении задачи в субситуации «Целераспределение» на основе оперативного многокритериального выбора альтернативы, при этом метод многокритериального выбора альтернативы из обобщенных типов альтернатив на основе генераций способов решения ситуации, настраиваемых вместе с математическими моделями на сложившуюся внешнюю обстановку, осуществляет выбор альтернативы на основе математических моделей сценария использования каждой сгенерированной альтернативы, осуществляет формирование матрицы приоритетов по результатам оперативного моделирования каждой альтернативы, производит расчет значений итоговых приоритетов сгенерированных альтернатив по этой матрице и по вектору приоритета критериев, осуществлении активизации при возникновении субситуации ДБВ 1×1 одной из проблемных ситуаций «Тактически выгодное положение» (ТВП), «Нападение», «Защита с нападением», «Защита», определении момента возникновения субситуации «Тактически выгодное положение», если оба противника находятся вне зоны возможных пусков (ЗВП) своих ракет и на истребителе есть время траекторным маневром занять ТВП, то есть занять на момент пуска своей ракеты такое положение в координатах «высота-скорость», чтобы обеспечить упреждающий пуск ракеты с упреждающим попаданием в цель, определении рекомендуемой траектории выхода истребителя в условия ТВП на основе оптимизационного метода, определении момента возникновения субситуации «Нападение», в случае если цель находится в ЗВП выбранной на пуск ракеты и противник еще не произвел пуск своей ракеты, при этом при вычислении момента пуска ракеты с истребителя учитывается возможный ответный пуск ракеты с истребителя противника, а также возможные противоракетные маневры противником и постановка помех информационным каналам нашего истребителя и каналам наведения ракеты, определении рекомендуемой траектории, моментов пуска ракеты и применения циклов помех на основе оптимизационного метода, определении момента возникновения субситуации «Защита с нападением», в случае если истребитель противника произвел упреждающий пуск ракеты, ответными действиями нашего истребителя при возможном со стороны истребителя противника маневренном и информационном противодействии являются запаздывающий пуск ракеты, противоракетное маневрирование, постановка помех информационным каналам истребителя противника и каналам наведения ракеты, определении рекомендуемой траектории, момента пуска ракеты и момента применения циклов помех на основе оптимизационного метода (игровой задачи), определении момента возникновения субситуации «Защита» в условиях, в случае если противник произвел упреждающий пуск ракеты, а наш истребитель намерен ответить только противоракетным маневрированием и постановкой информационных помех, определении рекомендуемой траектории противодействия атакующему истребителю противника и момента применения циклов помех на основе оптимизационного метода, передачи из каждой активизированной субситуации рекомендуемого способа ее разрешения летчику на информационно-управляющее поле, при этом рекомендуемый способ реализуется только после направления летчиком сигнала согласия на реализацию всей рекомендации или ее части или реализует альтернативные рекомендуемым решения [2].
Известна система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, которая содержит блок обработки входящей информации, блок конфигурации (2×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и целям на атаку; блок конфигурации (2×1) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок конфигурации (1×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок, определяющий условия начала ДВБ 1×1, возникшего в конфигурациях (2×2), (2×1), (1×2), (1×1) ДВБ M×N; блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1, возникшего в любой конфигурации (2×2), (2×1), (1×2), (1×1) ДВБ M×N; блок подготовки информации для информационно-управляющего поля (ИУП), при этом блок обработки входящей информации своими выходами соединен с блоком, формирующим рекомендации по проблемным субституциям ДВБ 1×1, возникшего в любой конфигурации (2×2), (2×1), (1×2), (1×1) ДВБ M×N, и с блоками конфигурации (2×2) ДВБ M×N, конфигурации (2×1) ДВБ M×N, конфигурации (1×2) ДВБ M×N, выходы которых соединены с блоком, определяющим условия начала ДВБ 1×1, и блоком подготовки информации на ИУП, при этом выход блока, определяющего условия начала ДВБ 1×1, соединен с первым входом блока, формирующего рекомендации по проблемным субситуациям ДВБ 1×1, второй вход и выход которого соединен с соответствующим выходом и входом блоком обработки входящей информации [2].
Недостатком данного способа и системы интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, является недостаточная эффективность при применении по малозаметным воздушным целям, обусловленная снижением дальности действия бортовых информационных систем и как следствие несвоевременная выдача рекомендаций летчику-истребителю в различных субситуациях. Летчик вынужден принимать решения в условиях острого дефицита времени. В этих условиях важно для оказания интеллектуальной поддержки летчикам, обеспечить каждый самолет пары своевременной информацией о координатах и векторах скоростей наблюдаемых самолетов противника. Временной интервал для принятия решений можно расширить за счет совместного полета пилотируемых и беспилотных летательных аппаратов. Известны способы [3, 4], обеспечивающие дальнее обнаружение и распознавание малозаметных воздушных целей, суть которых заключается в расширения дальности обнаружения за счет совестного использования пилотируемых и беспилотных летательных аппаратов, однако недостатком их является использования радиолокационной станции на борту БПЛА, при работе которой наблюдается демаскирующее излучения. Повысить эффективность применения истребителей можно за счет исключения демаскирующего излучения бортовой радио- локационной на борту БПЛА основе применения пассивных датчиков и косвенного определения дальности до ВЦ.
Техническим результатом предлагаемого изобретения является повышение эффективности применения истребителей на основе своевременной выдачи рекомендаций летчикам во всем спектре возникающих субситуаций за счет скрытного определения параметров движения малозаметных целей на дальних рубежах.
Технический результат достигается за счет того, что в способе интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, заключающимся в обмене информацией истребителями при полете в составе пары о нахождении в одной из ситуаций в атаке или в отражении атаки истребителей противника, координат и вектора скорости своего самолета, координат и вектора скоростей наблюдаемых самолетов пары противника, определении конфигурации дальнего воздушного боя (ДВБ) на основе анализа числа действующих (в текущий момент боя) самолетов в противоборствующих парах: в каждой паре по два самолета - конфигурация боя (2×2); в паре М два самолета, а в паре N остался один самолет - конфигурация боя (2×1); в паре М остался один самолет, а в паре N два самолета - конфигурация боя (1×2); в каждой паре осталось по одному самолету - конфигурация боя (1×1), выдачи рекомендаций при решении задачи в субситуации «Тактический прием» на основе выбора в базе знаний набора тактических приемов по прецеденту, при этом процедуру вычисления координат ситуационного вектора осуществляют на основе текущей информации, осуществляют выбор рекомендуемого прецедента по полученному ситуационному вектору в процедурной матрице знаний этой ситуации на основе расчета приоритетов всех включенных в матрицу знаний прецедентов и выбора прецедента с наибольшим приоритетом, выдачи рекомендаций при решении задачи в субситуации «Целераспределение» на основе оперативного многокритериального выбора альтернативы, при этом метод многокритериального выбора альтернативы из обобщенных типов альтернатив на основе генераций способов решения ситуации, настраиваемых вместе с математическими моделями на сложившуюся внешнюю обстановку, осуществляет выбор альтернативы на основе математических моделей сценария использования каждой сгенерированной альтернативы, осуществляет формирование матрицы приоритетов по результатам оперативного моделирования каждой альтернативы, производит расчет значений итоговых приоритетов сгенерированных альтернатив по этой матрице и по вектору приоритета критериев, осуществлении активизации при возникновении субситуации ДВБ 1×1 одной из проблемных ситуаций «Тактически выгодное положение» (ТВП), «Нападение», «Защита с нападением», «Защита», определении момента возникновения субситуации «Тактически выгодное положение», если оба противника находятся вне зоны возможных пусков (ЗВП) своих ракет и на истребителе есть время траекторным маневром занять ТВП, то есть занять на момент пуска своей ракеты такое положение в координатах «высота-скорость», чтобы обеспечить упреждающий пуск ракеты с упреждающим попаданием в цель, определении рекомендуемой траектории выхода истребителя в условия ТВП на основе оптимизационного метода, определении момента возникновения субситуации «Нападение», в случае если цель находится в ЗВП выбранной на пуск ракеты и противник еще не произвел пуск своей ракеты, при этом при вычислении момента пуска ракеты с истребителя учитывается возможный ответный пуск ракеты с истребителя противника, а также возможные противоракетные маневры противником и постановка помех информационным каналам нашего истребителя и каналам наведения ракеты, определении рекомендуемой траектории, моментов пуска ракеты и применения циклов помех на основе оптимизационного метода, определении момента возникновения субситуации «Защита с нападением», в случае если истребитель противника произвел упреждающий пуск ракеты, ответными действиями нашего истребителя при возможном со стороны истребителя противника маневренном и информационном противодействии являются запаздывающий пуск ракеты, противоракетное маневрирование, постановка помех информационным каналам истребителя противника и каналам наведения ракеты, определении рекомендуемой траектории, момента пуска ракеты и момента применения циклов помех на основе оптимизационного метода (игровой задачи), определении момента возникновения субситуации «Защита» в условиях, в случае если противник произвел упреждающий пуск ракеты, а наш истребитель намерен ответить только противоракетным маневрированием и постановкой информационных помех, определении рекомендуемой траектории противодействия атакующему истребителю противника и момента применения циклов помех на основе оптимизационного метода, передачи из каждой активизированной субситуации рекомендуемого способа ее разрешения летчику на информационно-управляющее поле, при этом рекомендуемый способ реализуется только после направления летчиком сигнала согласия на реализацию всей рекомендации или ее части или реализует альтернативные рекомендуемым решения, дополнительно осуществляют дальнее скрытное обнаружение малозаметных воздушных целей на основе совместного полета истребителей и сопровождающих их по курсу беспилотного летательного аппарата с теплопеленгатором, на расстояние необходимое для увеличения радиуса действия пары истребителей, с целью обнаружения всех ЛА, представляющих угрозу, определяют на борту БПЛА параметры движения ВЦ в условиях скрытного наблюдения за ней, передают параметры движения воздушной цели на борт истребителей для обеспечения своевременного принятия решения во всех возникающих субситуациях.
Кроме того в способе интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, определяют параметры движения ВЦ в условиях скрытного наблюдения за ней беспилотным летательным аппаратом при различной гипотезе ее движения, в случае идентификации ее движения по прямолинейной траектории с постоянной скоростью определяют дальность в виде выражения:
 ,
,
где D1 - дальность при осуществлении первой засечки углового положения цели; Б1, Б3 - базовые расстояния, пролетаемые многофункциональным самолетом на первом и третьем участках сближения; β1, β4 - угловые положения цели в момент первой и четвертой засечки; ε - угол наклона траектории ВЦ. в случае идентификации ее движения по прямолинейной траектории с ускорением определяют дальность в виде аналитической зависимости:
 .
.
в случае идентификации ее движения по криволинейной траектории определяют дальность в виде аналитической зависимости:
 .
.
При этом идентификация гипотезы движения ВЦ осуществляется на основе анализа динамики изменений ее угловых координат по величине и направлению, в случае если угол, определяющий траекторию движения воздушной цели постоянный, а ускорение равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с постоянной скоростью, в случае если угол, определяющий траекторию движения воздушной цели постоянный, а ускорение не равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с ускорением, в случае если угол, определяющий траекторию движения воздушной цели изменяется, а ускорение равно нулю или не равно нулю в соответствии с выражением:
то идентифицируют движение воздушной цели по криволинейной траектории, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по прямолинейной траектории с постоянной скоростью на основе четырех засечек угловых положений цели и базовых расстояний, пролетаемых истребителем, при этом скорости полета истребителя на первом и втором участке постоянные, а на третьем участке происходят изменения, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по прямолинейной траектории с ускорением на основе пяти засечек угловых положений цели и базовых расстояний, пролетаемых истребителем, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по криволинейной траектории на основе шести засечек угловых положений цели и базовых расстояний, пролетаемых истребителем.
Способ реализуется в системе интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, которая содержит блок обработки входящей информации, блок конфигурации (2×2) дальнего воздушного боя ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и целям на атаку; блок конфигурации (2×1) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок конфигурации (1×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок, определяющий условия начала ДВБ 1×1; блок, формирующий рекомендации по проблемным субституциям ДВБ 1×1; блок подготовки информации для информационно-управляющего поля (ИУП); при этом блок обработки входящей информации своими выходами соединен с блоком, формирующим рекомендации по проблемным субситуациям ДВБ 1×1, и с блоками конфигурации (2×2) ДВБ M×N, конфигурации (2×1) ДВБ M×N, конфигурации (1×2) ДВБ M×N, выходы которых соединены с блоком, определяющим условия начала ДВБ 1×1, и блоком подготовки информации на ИУП, при этом выход блока, определяющего условия начала ДВБ 1×1, соединен с первым входом блока, формирующего рекомендации по проблемным субситуациям ДВБ 1×1, второй вход и выход которого соединен с соответствующим выходом и входом блока обработки входящей информации, дополнительно введена система оценки ситуационной обстановки, входом которой является инфракрасное излучение воздушной цели, а выход соединен с входом блока обработки входящей информации.
Кроме того система оценки ситуационной обстановки содержит размещенные на борту беспилотного летательного аппарата, теплопеленгатор, блок определения гипотез движения цели, блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с постоянной скоростью, блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с ускорением, блок косвенного определения дальности до воздушной цели при ее движении по криволинейной траектории, шифратор, передающее устройство, размещенные на борту истребителя приемное устройство дешифратор, причем входом теплопеленгатора является инфракрасное - излучение цели, выход которого соединен со входом блока определения гипотез движения цели, первый, второй и третий выходы которого соединены соответственно со входом блока косвенного определения- дальности до воздушной цели при ее движении по прямолинейной траектории с постоянной скоростью, блока косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с ускорением, блока косвенного определения дальности до воздушной цели при ее движении по криволинейной траектории, выходы которых соединены соответственно с первым, вторым и третьим входами шифратора, выход которого через передающее устройство по линии бесконтактной связи соединен с приемным устройством, выход которого соединен со входом дешифратора, выход которого является выходом системы оценки ситуационной обстановки.
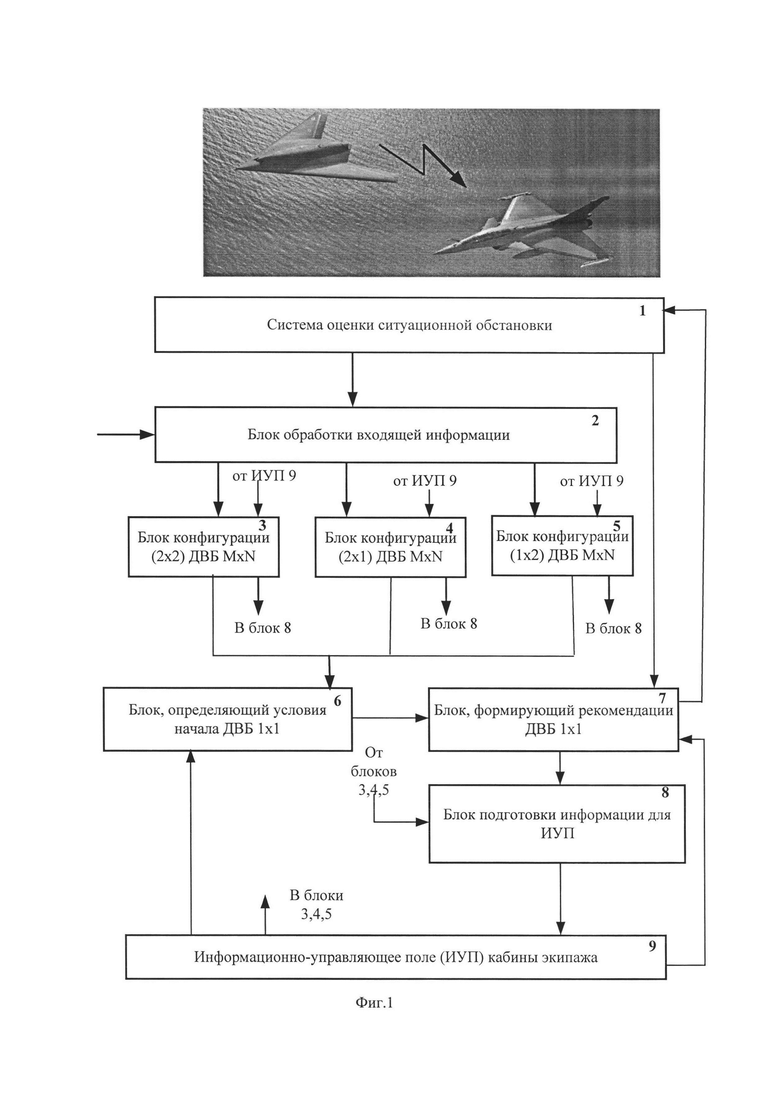
На фиг. 1 представлена структурная схема системы, где: 1 - система оценки ситуационной обстановки, 2 - блок обработки входящей информации, 3 - блок конфигурации(2х2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и целям на атаку, 4 - блок конфигурации (2х1) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку, 5 - блок конфигурации (1×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку, 6 - блок, определяющий условия начала ДВБ 1×1, возникшего в конфигурациях (2×2), (2×1), (1×2), (1×1) ДВБ M×N, 7 - блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1, 8 - блок подготовки информации для ИУП, 9 - ИУП, в котором размещаются поступившие из системы интеллектуальной поддержки летчиков истребителей в дальнем воздушном бою с парой истребителей противника рекомендации летчику в удобном для восприятия виде и месте на информационном кадре многофункционального индикатора (МФИ), обеспечивая тем самым быструю реакцию летчика на появившуюся рекомендацию. На фиг. 2 - структурная схема системы оценки ситуационной обстановки, где: 10 - теплопеленгатор, 11 - блок определения гипотез движения цели, 12 - блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с постоянной скоростью, 13 - блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с ускорением, 14 - блок косвенного определения дальности до воздушной цели при ее движении по криволинейной траектории, 15 - шифратор, 16 - передающее устройство, 17 - приемное устройство, 18 - дешифратор.
Блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7), возникшего в любой конфигурации (2×2), (2×1), (1×2), (1×1) ДВБ M×N и осуществляющий выдачу рекомендаций летчику в проблемных субситуациях: ПрС/С «Занятие тактически выгодного положения», ПрС/С «Нападение», ПрС/С «Защита с нападением», ПрС/С «Защита» по занятию тактически выгодного положения, по моменту пуска ракеты по самолету противника, моментам постановки циклов информационных помех атакуемому истребителю противника, типу противоракетных маневров против готовящейся к пуску или уже атакующей ракете противника.
Блок подготовки информации для ИУП (8), конструирующий форму и вид представления рекомендаций системы на информационных кадрах многофункциональных индикаторах ИУП и запуск речевых сообщений летчику о критических событиях ДВБ M×N.
ИУП (9), обеспечивает размещения рекомендации летчику в удобном для восприятия виде и месте на информационном кадре многофункционального индикатора (МФИ), поступивший из системы интеллектуальной поддержки летчиков истребителей в дальнем воздушном бою с парой истребителей противника, обеспечивая тем самым быструю реакцию летчика на появившуюся рекомендацию. Управляющая часть ИУП (9) обеспечивает быстрый ввод летчиком сигнала, которым летчик сообщает о своем согласии на реализацию рекомендации, и сигнала о корректировке вектора приоритетов критериев в методе многокритериального выбора альтернативы. Сигналы о согласии летчика на реализацию рекомендаций, представленных ему на МФИ, передаются во все блоки, где вырабатываются эти рекомендации (в блоки (3), (4), (5), (6)).
Система может быть представлена в одном вычислителе, который содержит процессоры и модуль памяти, но предпочтительно каждый блок конфигурации реализовать на своем вычислителе, структура которого ориентирована на специфику выполняемых в блоке процедур, что обеспечивает требуемое быстродействие вычислителей и возможность вносить корректировки в процедуры одной конфигурации, сохраняя работоспособность других конфигураций.
Система интеллектуальной поддержки летчиков истребителей в дальнем воздушном бою с парой истребителей противника включает систему оценки ситуационной обстановки на дальних рубежах (1), блок обработки входящей информации(2), блок конфигурации (2×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и целям на атаку (3), блок конфигурации (2×1) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку(4), блок конфигурации (1×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку (5), блок, определяющий условия начала ДВБ 1×1, возникшего в конфигурациях (2×2), (2×1), (1×2), (1×1) ДВБ M×N (6); блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7), возникающего в конфигурациях (2×2), (2×1), (1×2), (1×1) ДВБ M×N; блок подготовки информации для ИУП (8), в котором конструируется форма представления рекомендаций летчику на многофункциональных индикаторах (МФИ) и обеспечивается быстрая передача ее в ИУП (9).
Работа системы осуществляется следующим образом.
На дальних рубежах относительно истребителей осуществляется скрытное определение параметров движения цели на борту беспилотного летательного аппарата входящего в систему оценки ситуационной обстановки.
При этом идентификация гипотезы движения ВЦ осуществляется на основе анализа динамики изменений ее угловых координат по величине и направлению, в случае если угол, определяющий траекторию движения воздушной цели постоянный, а ускорение равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с постоянной скоростью. При этом случае если угол, определяющий траекторию движения воздушной цели постоянный, а ускорение неравно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с ускорением. При этом в случае если угол, определяющий траекторию движения воздушной цели изменяется, а ускорение равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по криволинейной траектории.
Дальность до ВЦ при идентификации ее полета по прямолинейной траектории с постоянной скоростью определяется виде выражения:

где D1 - дальность при осуществлении первой засечки углового положения цели; Б1, Б3 - базовые расстояния, пролетаемые многофункциональным самолетом на первом и третьем участках сближения; β1, β4 - угловые положения цели в момент первой и четвертой засечки; ε - угол наклона траектории ВЦ.
В данном случае определение дальности до ВЦ, осуществляется на основе четырех засечек угловых положений цели и базовых расстояний, пролетаемых истребителем, при условии, что скорости полета истребителя на первом и втором участке постоянные, а на третьем участке изменяются.
Дальность до ВЦ при идентификации ее полета по прямолинейной траектории с ускорением определяется виде выражения:

где L0+4⋅ΔL - расстояние, пролетаемое целью между засечками угловых положений воздушной цели.
В данном случае определение дальности до ВЦ, осуществляется на основе пяти засечек угловых положений цели и базовых расстояний, пролетаемых истребителем.
Дальность до ВЦ при идентификации движения ВЦ по криволинейной траектории определяется виде выражения:
 .
.
В данном случае определение дальности до ВЦ осуществляется на основе шести засечек угловых положений цели и базовых расстояний, пролетаемых беспилотным летательным аппаратом.
Информация о дальности до ВЦ и ее угловых координат поступает от БПЛА на борт пилотируемых истребителей для системы интеллектуальной поддержки летчика.
Система интеллектуальной поддержки летчиков истребителей размещается на борту ВДЩ и ВДМ. Они через бортовые системы телекодовой связи постоянно обмениваются следующей текущей информацией:
- признак наличия/существования истребителя «Я в паре», где «Я» обозначает соответственно ВДЩ или ВДМ;
- признак и фаза (проблемная субситуация) «моей» атаки истребителя противника, которого атакую «Я»;
- признак и фаза атаки каждого истребителя противника, которые атакуют «меня», где «меня» обозначает ВДЩ или ВДМ;
- координаты и вектор скорости своего самолета;
- координаты и вектора скоростей наблюдаемых самолетов пары противника.
Указанная выше информация от напарника поступает через штатные бортовые цифровые вычислительные машины (БЦВМ) в блок обработки входящей информации (1), в которой производится обработка входящей информации, что позволяет определять текущую конфигурацию ДВБ M×N и возникающие в каждой конфигурации ПрС/С атаки противником самолетов пары М, ПрС/С атаки самолетами пары М самолетов противника: «Меня» атакует самолет противника, но «Я» в это время атакую или другой самолет противника или не атакую никого или атакую его.
По информации, поступающей из блока (7), в блоке обработки информации (1) определяются возникшие у ВДЩ и у ВДМ текущие ПрС/С в их воздушном бою 1×1.
Конфигурация ДВБ M×N определяется числом существующих (в текущий момент ДВБ M×N) самолетов своей пары и самолетов пары противника. Текущая проблемная субситуация ДВБ 1×1 для своего борта, определяемая по сигналу, поступившему из блока (6), а для борта напарника по признаку, поступившему по телекодовой связи с его борта.
После определения признака конфигурации боя в текущий момент времени в блоке обработки входной информации (2) сигнал с признаком конфигурации боя передается в соответствующий блок.
Из блока (2) сигнал с признаком конфигурации (2×2) поступает в блок конфигурации (2×2) ДВБ M×N (3), содержащий базу знаний, которая имеет два иерархических уровня.
На первом иерархическом уровне базы знаний конфигурации (2×2) ДБВ M×N продукционными правилами определяется признак той ПрС/С, которая соответствует текущей внешней обстановке. Признак ПрС/С передается на второй иерархический уровень базы знаний конфигурации (2×2) ДВБ M×N.
На этом иерархическом уровне базы знаний конфигурации (2×2) ДВБ M×N по этому признаку активизируется одна соответствующая ПрС/С конфигурации (2×2) ДВБ из числа возможных ПрС/С в этой конфигурации боя:
-ПрС/С «Выбор тактического приема», в которой тактический прием выбирается из содержащего в базе знаний набора тактических приемов, разработанных для ДВБ 2×2. Метод решения ПрС/С - по прецеденту;
- ПрС/С «Целераспределение», в которой распределяются самолеты пары противника между самолетами нашей пары. Метод решения ПрС/С - оперативный многокритериальный выбор альтернативы.
Сигнал, содержащий информацию о рекомендуемом тактическом приеме и рекомендуемых ВДМ и ВДЩ целях на атаку, передается из блока конфигурации (2×2) ДБВ M×N (3) через блок (8) на ИУП (9).
Сигнал, содержащий информацию о рекомендуемых на атаку целях, передается из блока конфигурации (2×2) ДВБ M×N (3) в блок, определяющий условия начала ДВБ 1×1 (6). Далее после поступления из ИУП (9) сигнала, означающего согласие летчика, в блок, определяющий условия начала ДБВ 1×1 (6), информация по назначенной цели поступает в блок, формирующий рекомендации по проблемным субситуациям боя ДВБ 1×1 (7).
При конфигурации (2×1) ДВБ M×N сигнал с признаком конфигурации поступает в блок конфигурации (2×1) ДВБ M×N (4), содержащий базу знаний, которая имеет два иерархических уровня.
На первом иерархическом уровне базы знаний конфигурации (2×1) ДВБ M×N продукционными правилами определяется признак той ПрС/С, которая соответствует текущей внешней обстановке. Признак ПрС/С передается на второй иерархический уровень базы знаний конфигурации (2×1) ДВБ M×N.
На этом иерархическом уровне базы знаний конфигурации (2×1) ДВБ M×N по этому признаку активизируется одна соответствующая ПрС/С конфигурации (2×1) ДВБ M×N из числа возможных ПрС/С в этой конфигурации боя:
ПрС/С «Выбор тактического приема», в которой тактический прием выбирается из содержащего в базе знаний набора тактических приемов, разработанных для ДВБ 2×1. Метод решения ПрС/С - по прецеденту;
ПрС/С «Целераспределение», в которой назначается самолет противника одному из самолетов нашей пары. Метод решения ПрС/С - оперативный многокритериальный выбор альтернативы.
Сигнал, содержащий информацию о рекомендуемом тактическом приеме и рекомендуемой ВДМ или ВДЩ цели на атаку, передается из блока конфигурации (2×1) ДВБ M×N (4) через блок (8) на ИУП (9).
Сигнал, содержащий информацию о рекомендуемой на атаку цели, передается из блока конфигурации (2×1) ДВБ M×N (4) в блок, определяющий условия начала ДВБ 1×1 (6). Далее после поступления из ИУП (9) сигнала, означающего согласие летчика, в блок, определяющий условия начала ДВБ 1×1 (6), информация по назначенной цели поступает в блок, формирующий рекомендации по проблемным субситуациям боя ДВБ 1×1 (7).
При конфигурации боя (1×2) ДВБ M×N сигнал с признаком конфигурации из блока 2 поступает в блок конфигурации (1×2) ДВБ M×N(5), содержащий базу знаний, которая имеет два иерархических уровня.
На первом иерархическом уровне базы знаний конфигурации (1×2) ДВБ M×N продукционными правилами определяется признак той ПрС/С, которая соответствует текущей внешней обстановке. Признак передается на второй иерархический уровень базы знаний конфигурации (1×2) ДВБ M×N.
На этом иерархическом уровне базы знаний конфигурации (1×2) ДВБ M×N по этому признаку активизируется одна соответствующая ПрС/С конфигурации (1×2) ДВБ M×N из числа возможных ПрС/С в этой конфигурации боя:
- ПрС/С «Выбор тактического приема», в которой тактический прием выбирается из содержащего в базе знаний набора тактических приемов, разработанных для ДВБ 1×2. Метод решения ПрС/С - по прецеденту.
- ПрС/С «Целераспределение», в которой назначается на атаку один их двух самолетов противника. Метод решения ПрС/С - оперативный многокритериальный выбор альтернативы.
Сигнал, содержащий информацию о рекомендуемом тактическом приеме и рекомендуемых ВДМ и ВДЩ целях на атаку, передается из блока конфигурации (1×2) ДБВ M×N (5) через блок (8) на ИУП (9).
Сигнал, содержащий информацию о рекомендуемой на атаку цели, передается из блока конфигурации (1×2) ДВБ M×N (5) в блок, определяющий условия начала ДВБ 1×1 (6). Далее после поступления из ИУП (9) сигнала, означающего согласие летчика, в. блок, определяющий условия начала ДВБ 1×1 (6), информация по назначенной цели поступает в блок, формирующий рекомендации по проблемным субситуациям боя ДВБ 1×1 (7).
ПрС/С «Выбор тактического приема» в блоках конфигурации (2×2) ДВБ M×N (3), конфигурации (2×1) ДВБ M×N (4), конфигурации (1×2) ДВБ M×N (5) решается по прецеденту.
Формирование данных для решения ПрС/С по прецеденту осуществляется процедурой вычисления по текущей информации координат ситуационного вектора (проблемная субситуация - прецедент). Выбор рекомендуемого прецедента происходит по полученному ситуационному вектору в процедурной матрице знаний этой ПрС/С, в которой рассчитываются приоритеты всех включенных в матрицу знаний прецедентов. Прецедент с наибольшим приоритетом содержит способ решения ПрС/С.Сигнал, содержащий информацию об этом способе, подается через блок подготовки информации для ИУП (7) на дисплей информационно-управляющего поля (8) кабины экипажа.
ПрС/С «Целераспределение» в блоках конфигурации (2×2) ДВБ M×N(2), конфигурации (2×1) ДВБ M×N (3) и конфигурации (1×2),HBBM×N(4) разрешается по методу многокритериального выбора альтернатив.
В методе многокритериального выбора альтернативы из обобщенных типов альтернатив разрешения ПрС/С генерируются альтернативы (способы решения ПрС/С), настраиваемые вместе с математическими моделями объектов на сложившуюся внешнюю обстановку. В упомянутых блоках выбора альтернативы на математических моделях сценария использования каждой сгенерированной альтернативы по результатам оперативного моделирования каждой альтернативы формируется матрица приоритетов сгенерированных альтернатив по каждому заложенному в блоке критерию их оценки. По этой матрице и по вектору приоритета критериев, полученному из полетного задания и возможно оперативно скорректированному экипажем, рассчитываются значения итоговых приоритетов сгенерированных альтернатив. Альтернатива с наибольшим итоговым приоритетом передается через блок подготовки информации для ИУП (8) на дисплей информационно-управляющего поля (9) кабины экипажа.
В блоке (2) вместе с признаками конфигурации ДВБ M×N (конфигурации (2×2) ДВБ M×N, (2×1) ДВБ M×N, (1×2) ДВБ M×N) вырабатывается признак возникшего в этих конфигурациях ДВБ 1×1. По этому признаку через блок (6) подключается блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7).
Вместе с этими признаками конфигураций ДВБ M×N из блока 2 в блоки конфигурации (2×2) ДВБ M×N (3) конфигурации (2×1) ДВБ M×N (4), конфигураций 1×2) ДВБ M×N (5) подается полученная из штатных БЦВМ и из блока, формирующего рекомендации по проблемным субситуациям ДВБ 1×1 (7), информация:
- координаты и вектора скоростей истребителей противоборствующих противников;
- признак, возникшего в этой конфигурации дальнего воздушного боя ДБВ 1×1;
- текущая ПрС/С ВДЩ и ВДМ в реализуемом ДБВ 1×1;
- признаки истребителей противника пары N, атакующие ВДЩ и ВДМ.
Тактический прием и вариант целераспределения, сформированные в блоке конфигурации (2×2) ДВБ M×N (3), в блоке конфигурации (2×1) ДВБ M×N(4) или в блоке конфигурации (1×2) ДВБ M×N (5) в зависимости от конфигурации боя в текущий момент, передаются в блок подготовки информации для ИУП (8). Цель для ВДЩ и ВДМ вместе с информацией о ней, передается в блок, определяющий условия ДВБ 1×1 (6).
В блоке, определяющем условия начала ДВБ 1×1 (6) по поступившему сигналу от одного из блоков конфигурации (2×2) ДВБ M×N (3), конфигурации (2×1) ДВБ M×N (4) конфигурации (1×2) ДВБ M×N (5) анализируются две ситуации, в которых была назначена цель на атаку:
- цель была сразу назначена в выбранном тактическом приеме;
- в выбранном тактическом приеме цель назначается уже в процессе его выполнения или цель назначена летчиком с ИУП.
В первой ситуации момент подключения блока, формирующего рекомендации по проблемным субситуациям ДВБ 1×1 (7), для непосредственного ведения дальнего боя 1×1 в этих конфигурациях совпадает с моментом входа назначенной цели в зону возможных пусков (ЗВП) ракеты истребителя пары М (штатный алгоритм на любом истребителе).
Во втором случае сразу подключается блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7).
В блоке (6) определяются только условия начала ДВБ 1×1, в него тоже подается сигнал из ИУП (9) (в случае, когда летчик сам принял решение о начале ДВБ 1×1.)
Блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7), подключается во всех конфигурация ДВБ M×N через блок, определяющий условия начала ДВБ 1×1 (6), а в конфигурации 1×1 блок (7) подключается блоком (2) напрямую.
Конфигурация (1×1) ДВБ M×N, признак которой определяется в блоке (2), определяется по факту потери в каждой паре противников по одному самолету. В блоке (2) по отсутствию в информации, поступившей по телекодовой связи, сигнала «Я в паре» и пропадании информации о наличии в паре противника одного самолета вырабатывается признак этой конфигурации (1×1) ДВБ M×N, который вместе с координатами противника сразу передается в блок, формирующий рекомендации по проблемным субситуациям ДВБ 1×1 (7).
В блоке (7) содержится база знаний дальнего воздушного боя 1×1 истребителя (И1) с истребителем противника (И2), в котором возможны следующие проблемные субситуации ПрС/С:
«Занятие истребителем тактически выгодного положения» (ПрС/С «ТВП»); «Нападение»; «Защита с нападением»; «Защита».
В блоке (7) вырабатываются оперативные рекомендации летчику по способу решению этих ПрС/С.
База знаний блока (7) имеет два иерархических уровня. На первом иерархическом уровне базы знаний по ситуационному вектору (ДВБ 1×1 - ПрС/С), продукционными правилами активизируется одна из ПрС/С, возможных в ДВБ 1×1. На втором иерархическом уровне осуществляется выбор рационального способа решения активизированной ПрС/С.Прежде всего на этом иерархическом уровне содержащиеся в нем математические модели истребителей и ракет «воздух-воздух» параметрически настраиваются на функциональные возможности наблюдаемых истребителей и находящихся на траектории атаки ракет «воздух-воздух». Во входящих в базу знаний блока (7) проблемных субситуациях конструируется способ их решения следующим образом.
ПрС/С «Тактически выгодное положение (ТВП)». Эта ПрС/С наступает, когда оба противника находятся вне ЗВП своих ракет и на И1 есть время траекторным маневром занять ТВП, то есть занять на момент пуска своей ракеты R(И1) такое положение И1 в координатах «высота-скорость» (H, V), чтобы обеспечить с И1 упреждающий пуск ракеты R(И1) с упреждающим попаданием в И2. Метод определения рекомендуемой траектории выхода истребителя в условия ТВП - оптимизационный.
ПрС/С «Нападение». Нанесение упреждающего ракетного удара по противостоящему воздушному противнику, обороняющемуся пуском ракет, маневром и информационными помехами. ПрС/С наступает, когда И2 находится в ЗВП выбранной на И1 ракеты R(И1) и противник еще не произвел пуск своей ракеты. При вычислении момента пуска ракеты с И1 учитывается возможный ответный пуск ракеты R(И2) с истребителя И2, а также возможные противоракетные маневры И2 и постановка с И2 помех информационным каналам И1 и каналам наведения ракеты R(И1). Метод определения рекомендуемой траектории, момента пуска ракеты и моментов применения циклов помех - оптимизационный (игровая задача).
ПрС/С «Защита с нападением». Применение эффективного ответного ракетного удара, оборонительного маневра и действенной информационной помехи в ответ на пуск ракеты противником. ПрС/С наступает, когда И2 произвел упреждающий пуск ракеты R(И2). Ответными действиями И1 при возможном со стороны И2 маневренном и информационном противодействии являются запаздывающий пуск ракеты R(И1), противоракетное маневрирование, постановка помех информационным каналам И2 и каналам наведения ракеты R(И2). Метод определения рекомендуемой траектории, момента пуска ракеты и моментов применения циклов помех - оптимизационный (игровая задача).
ПрС/С «Защита». Применение только противоракетного маневра и постановка информационной помехи в ответ на пуск ракеты противником наступает, когда И2 произвел упреждающий пуск ракеты R(И2), а И1 намерен ответить только противоракетным маневрированием и постановкой информационных помех. Метод определения рекомендуемой траектории противодействия атакующему истребителю противника и определения моментов применения циклов помех - оптимизационный.
Из каждой активизированной ПрС/С рекомендуемый способ ее разрешения передается через блок (8) летчику на ИУП (9). Рекомендуемый способ реализуется только после направления летчиком сигнала согласия на реализацию всей рекомендации или ее части или реализует альтернативные рекомендуемым решения.
Признак активизированной ПрС/С из блока (6) поступает в блок (2). Сигнал, содержащий рекомендации летчику, из блока (6) передается в блок подготовки информации для ИУП (7), в котором конструируется форма представления рекомендации летчику на многофункциональных индикаторах ИУП и запуск речевых сообщений Летчику о возникших критических событиях ДВБ M×N.
Из блока подготовки информации для ИУП (8) информация, содержащая рекомендации летчику, передается в ИУП (9). В ИУП (9), размещаются подготовленные в блоке (8) рекомендации летчику в удобном для восприятия летчиком месте информационного кадра МФИ, позволяющие летчику быстро их обнаружить и воспринять. Через ИУП (9) летчик посылает в блок, определяющий условия начала ДВБ 1×1 (6), и в блоки (2), (3), (4), (5) сигналы согласия на реализацию всей рекомендации или ее части или реализует альтернативные рекомендуемым решения. При этом в процессе ведения дальнего воздушного боя своевременность выдачи рекомендаций во всех проблемных ситуаций обеспечивается системой оценки ситуационной обстановки.
Таким образом, применение на борту самолета системы интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, имеющей в своем составе систему оценки ситуационной обстановки позволяет эффективно решать проблемы ДВБ при всех возникающих в процессе боя его конфигурациях и при любой текущей фазе атаки каждого истребителя из противоборствующих пар на основе получения дополнительной информации о параметрах полета малозаметных воздушных целей в условиях скрытного наблюдения за ними.
Источники информации
1. Демкин М.А., Тищенко Ю.Е., Федунов Б.Е. «Бортовая оперативно советующая система для дуэльной ситуации дальнего воздушного боя». Известия Российской академии наук. Теория и системы управления. 2008. №4, с. 59-75.
2. Патент 2789042 Российская Федерация. МПК G06F 17/10, B64D 45/00. Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника / Федунов Б.Е., Юневич Н.Д. Куликовский Е.И. - 2022105237; заявл. 28.02.2022. Патентообладатель(и): Федеральное государственное унитарное предприятие "Государственный научно-исследовательский институт авиационных систем" (ФГУП ГосНИИАС", опубл.: 27.01.2023 Бюл. №3
3. Патент 2802089 Российская Федерация. МПК F41H 13/00, G01S 13/04. B64S 39/02, B64D 5/00. Способ дальнего обнаружения и распознавания малозаметных воздушных целей/ Ефанов В.В. - 2022121805; заявл. 09.08.2022 г., опубл.22.08.2023 г., бюл. №24
4. Патент 2802089. Российская Федерация. МПК F41H 13/00, G01S 13/04. B64S 39/02, B64D 5/00. Способ дальнего обнаружения и поражения малозаметных воздушных и наземных целей / Ефанов В.В. - 2022121806 заявл. 09.08.2022 г., опубл.02.10.2023 г., бюл. №28.

Группа изобретений относится к способу и системе интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника. Для интеллектуальной поддержки летчиков-истребителей производят обмен определенной информацией в полете в составе пары, производят расчет определенным образом возможных ситуаций обороны или атаки при различных возможных конфигурациях количества и положения своих самолетов-истребителей и истребителей противника и вырабатывают возможные рекомендации и варианты для защиты или нападения. Система содержит блок обработки входящей информации, блоки конфигурации дальнего воздушного боя (2×2, 2×1, 1×2, 1×1), блок подготовки информации для информационно-управляющего поля. Обеспечивается повышение эффективности применения истребителей на основе своевременной выдачи рекомендаций летчикам во всем спектре возникающих субситуаций. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, заключающийся в обмене информацией истребителями при полете в составе пары о нахождении в одной из ситуаций в атаке или в отражении атаки истребителей противника, координатах и векторе скорости своего самолета, координатах и векторах скоростей наблюдаемых самолетов пары противника, определении конфигурации дальнего воздушного боя (ДВБ) на основе анализа числа действующих (в текущий момент боя) самолетов в противоборствующих парах: в каждой паре по два самолета - конфигурация боя (2×2); в паре М два самолета, а в паре N остался один самолет - конфигурация боя (2×1); в паре М остался один самолет, а в паре N два самолета - конфигурация боя (1×2); в каждой паре осталось по одному самолету - конфигурация боя (1×1), выдаче рекомендаций при решении задачи в субситуации «Тактический прием» на основе выбора в базе знаний набора тактических приемов по прецеденту, при этом процедуру вычисления координат ситуационного вектора осуществляют на основе текущей информации, осуществляют выбор рекомендуемого прецедента по полученному ситуационному вектору в процедурной матрице знаний этой ситуации на основе расчета приоритетов всех включенных в матрицу знаний прецедентов и выбора прецедента с наибольшим приоритетом, выдаче рекомендаций при решении задачи в субситуации «Целераспределение» на основе оперативного многокритериального выбора альтернативы, при этом метод многокритериального выбора альтернативы из обобщенных типов альтернатив на основе генераций способов решения ситуации, настраиваемых вместе с математическими моделями на сложившуюся внешнюю обстановку, осуществляет выбор альтернативы на основе математических моделей сценария использования каждой сгенерированной альтернативы, осуществляет формирование матрицы приоритетов по результатам оперативного моделирования каждой альтернативы, производит расчет значений итоговых приоритетов сгенерированных альтернатив по этой матрице и по вектору приоритета критериев, осуществлении активизации при возникновении субситуации ДВБ 1×1 одной из проблемных ситуаций «Тактически выгодное положение» (ТВП), «Нападение», «Защита с нападением», «Защита», определении момента возникновения субситуации «Тактически выгодное положение», если оба противника находятся вне зоны возможных пусков (ЗВП) своих ракет и на истребителе есть время траекторным маневром занять ТВП, то есть занять на момент пуска своей ракеты такое положение в координатах «высота-скорость», чтобы обеспечить упреждающий пуск ракеты с упреждающим попаданием в цель, определении рекомендуемой траектории выхода истребителя в условия ТВП на основе оптимизационного метода, определении момента возникновения субситуации «Нападение», в случае если цель находится в ЗВП выбранной на пуск ракеты и противник еще не произвел пуск своей ракеты, при этом при вычислении момента пуска ракеты с истребителя учитывается возможный ответный пуск ракеты с истребителя противника, а также возможные противоракетные маневры противником и постановка помех информационным каналам нашего истребителя и каналам наведения ракеты, определении рекомендуемой траектории, моментов пуска ракеты и применения циклов помех на основе оптимизационного метода, определении момента возникновения субситуации «Защита с нападением», в случае если истребитель противника произвел упреждающий пуск ракеты, ответными действиями нашего истребителя при возможном со стороны истребителя противника маневренном и информационном противодействии являются запаздывающий пуск ракеты, противоракетное маневрирование, постановка помех информационным каналам истребителя противника и каналам наведения ракеты, определении рекомендуемой траектории, момента пуска ракеты и момента применения циклов помех на основе оптимизационного метода (игровой задачи), определении момента возникновения субситуации «Защита» в условиях, в случае если противник произвел упреждающий пуск ракеты, а наш истребитель намерен ответить только противоракетным маневрированием и постановкой информационных помех, определении рекомендуемой траектории противодействия атакующему истребителю противника и момента применения циклов помех на основе оптимизационного метода, передаче из каждой активизированной субситуации рекомендуемого способа ее разрешения летчику на информационно-управляющее поле, при этом рекомендуемый способ реализуется только после направления летчиком сигнала согласия на реализацию всей рекомендации или ее части или реализует альтернативные рекомендуемым решения, отличающийся тем, что осуществляют дальнее скрытное обнаружение малозаметных воздушных целей на основе совместного полета истребителей и сопровождающих их по курсу беспилотного летательного аппарата с теплопеленгатором, на расстояние, необходимое для увеличения радиуса действия пары истребителей, с целью обнаружения всех ЛА, представляющих угрозу, определяют на борту БПЛА параметры движения ВЦ в условиях скрытного наблюдения за ней, передают параметры движения воздушной цели на борт истребителей для обеспечения своевременного принятия решения во всех возникающих субситуациях.
2. Способ по п. 1, отличающийся тем, что определяют параметры движения ВЦ в условиях скрытного наблюдения за ней беспилотным летательным аппаратом при различных гипотезах ее движения, в случае идентификации ее движения по прямолинейной траектории с постоянной скоростью определяют дальность в виде выражения:
 ,
,
где D1 - дальность при осуществлении первой засечки углового положения цели; Б1, Б3 - базовые расстояния, пролетаемые многофункциональным самолетом на первом и третьем участках сближения; β1, β4 - угловые положения цели в момент первой и четвертой засечек; ε - угол наклона траектории ВЦ, в случае идентификации ее движения по прямолинейной траектории с ускорением определяют дальность в виде аналитической зависимости:
 ,
,
в случае идентификации ее движения по криволинейной траектории определяют дальность в виде аналитической зависимости:
 ,
,
при этом идентификация гипотезы движения ВЦ осуществляется на основе анализа динамики изменений ее угловых координат по величине и направлению, в случае если угол, определяющий траекторию движения воздушной цели, постоянный, а ускорение равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с постоянной скоростью, в случае если угол, определяющий траекторию движения воздушной цели постоянный, а ускорение не равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по прямолинейной траектории с ускорением, в случае если угол, определяющий траекторию движения воздушной цели изменяется, а ускорение равно нулю или не равно нулю в соответствии с выражением:

то идентифицируют движение воздушной цели по криволинейной траектории, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по прямолинейной траектории с постоянной скоростью на основе четырех засечек угловых положений цели и базовых расстояний, пролетаемых истребителем, при этом скорости полета истребителя на первом и втором участках постоянные, а на третьем участке происходят изменения, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по прямолинейной траектории с ускорением на основе пяти засечек угловых положений цели и базовых расстояний, пролетаемых истребителем, осуществляют определение параметров движения ВЦ в случае идентификации ее движения по криволинейной траектории на основе шести засечек угловых положений цели и базовых расстояний, пролетаемых истребителем.
3. Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника, характеризующаяся тем, что содержит блок обработки входящей информации, блок конфигурации (2×2) дальнего воздушного боя ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и целям на атаку; блок конфигурации (2×1) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок конфигурации (1×2) ДВБ M×N, осуществляющий выдачу рекомендации по тактическому приему и цели на атаку; блок, определяющий условия начала ДВБ 1×1; блок, формирующий рекомендации по проблемным субституциям ДВБ 1×1; блок подготовки информации для информационно-управляющего поля (ИУП); при этом блок обработки входящей информации своими выходами соединен с блоком, формирующим рекомендации по проблемным субситуациям ДВБ 1×1, и с блоками конфигурации (2×2) ДВБ M×N, конфигурации (2×1) ДВБ M×N, конфигурации (1×2) ДВБ M×N, выходы которых соединены с блоком, определяющим условия начала ДБВ 1×1, и блоком подготовки информации на ИУП, при этом выход блока, определяющего условия начала ДБВ 1×1, соединен с первым входом блока, формирующего рекомендации по проблемным субситуациям ДВБ 1×1, второй вход и выход которого соединены с соответствующим выходом и входом блока обработки входящей информации, отличающаяся тем, что дополнительно введена система оценки ситуационной обстановки, входом которой является инфракрасное излучение воздушной цели, а выход соединен с входом блока обработки входящей информации.
4. Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника по п. 3, отличающаяся тем, что система оценки ситуационной обстановки содержит размещенные на борту беспилотного летательного аппарата теплопеленгатор, блок определения гипотез движения цели, блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с постоянной скоростью, блок косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с ускорением, блок косвенного определения дальности до воздушной цели при ее движении по криволинейной траектории, шифратор, передающее устройство, размещенные на борту истребителя приемное устройство дешифратор, причем входом теплопеленгатора является инфракрасное излучение цели, выход которого соединен со входом блока определения гипотез движения цели, первый, второй и третий выходы которого соединены соответственно со входом блока косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с постоянной скоростью, блока косвенного определения дальности до воздушной цели при ее движении по прямолинейной траектории с ускорением, блока косвенного определения дальности до воздушной цели при ее движении по криволинейной траектории, выходы которых соединены соответственно с первым, вторым и третьим входами шифратора, выход которого через передающее устройство по линии бесконтактной связи соединен с приемным устройством, выход которого соединен со входом дешифратора, выход которого является выходом системы оценки ситуационной обстановки.
| Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника | 2022 |
|
RU2789042C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ГРУППОВЫХ ДЕЙСТВИЙ МНОГОФУНКЦИОНАЛЬНЫХ САМОЛЕТОВ | 2000 |
|
RU2177438C1 |
| Система интеллектуальной поддержки командира группы истребителей сопровождения для этапа полета "Маршрут-1" | 2019 |
|
RU2724573C1 |
| Способ интеллектуальной поддержки экипажа летательного аппарата при выполнении им этапа полета | 2020 |
|
RU2751377C1 |
| WO 2013122521 A1, 22.08.2013 | |||
| WO 2013122520 A1, 22.08.2013. | |||

