Изобретение относится к измерительной технике, а конкретно к устройствам для измерения веса и силы.
Известен датчик силы с упругим элементом параллелограммного типа с фольговыми тензорезисторами [1]. Датчик имеет хорошую метрологию, но не защищен от паразитных крутящих и реактивного момента в заделке, а также имеет небольшой (2 мВ/В) коэффициент передачи (выходной сигнал). Наиболее близким по технической сущности к предлагаемому изобретению является датчик, содержащий рычажный тензомодуль, встраиваемый в силопередающий механизм, состоящий из четырех растяжек, замкнутых на силоприемный узел, который через тягу, передает усилие, на рычаг тензомодуля [2]. Он лучше защищен от крутящих моментов. К недостатку можно отнести немонолитное исполнение силопередающей конструкции, что ухудшает метрологические характеристики датчика (гистерезис, воспроизводимость) и снижает его надежность при ударных нагрузках. Более того, несимметричное крепление тяги к рычагу с одной нижней или верхней части силоприемного узла позволяет измерять силы только в одном направлении, когда тяга натянута. Если нагрузка приложена в противоположном направлении, то тяга работает на сжатие, и так как у нее малое поперечное сечение, ее жесткость на изгиб мала и усилие к рычагу будет передаваться с большой погрешностью. Прототипом с такими же недостатками может служить датчик, описанный в [3].
Целями изобретения являются: повышение помехозащищенности, точности и надежности измерений в широком диапазоне температур (-50…+80)°С, а также увеличение величины выходного сигнала. Цели достигаются тем, что упругий элемент выполнен из титанового сплава в форме параллелограмма с двумя опорными площадками. В такой конструкции реактивный момент отсутствует. В центр упругого элемента встраивается серийно выпускаемый и также из титанового сплава модуль С 05 с мостом полупроводниковых тензорезисторов, что позволяет снизить температурные погрешности и повысить выходной сигнал минимум в десять раз. Усилие от параллелограмма к рычагу модуля передается через тягу, которая изготовлена монолитно с верхней и нижней частями параллелограмма, что позволяет повысить точность передачи силы не только за счет монолитности их исполнения, но и за счет симметричного (относительно ее центра) профилирования тяги в двух плоскостях. Такое выполнение тяги позволяет устранить влияние паразитных моментов. Связь тяги с двумя балками параллелограмма позволяет измерять силу, не в одном, а в двух противоположных направлениях, что делает датчик универсальным.
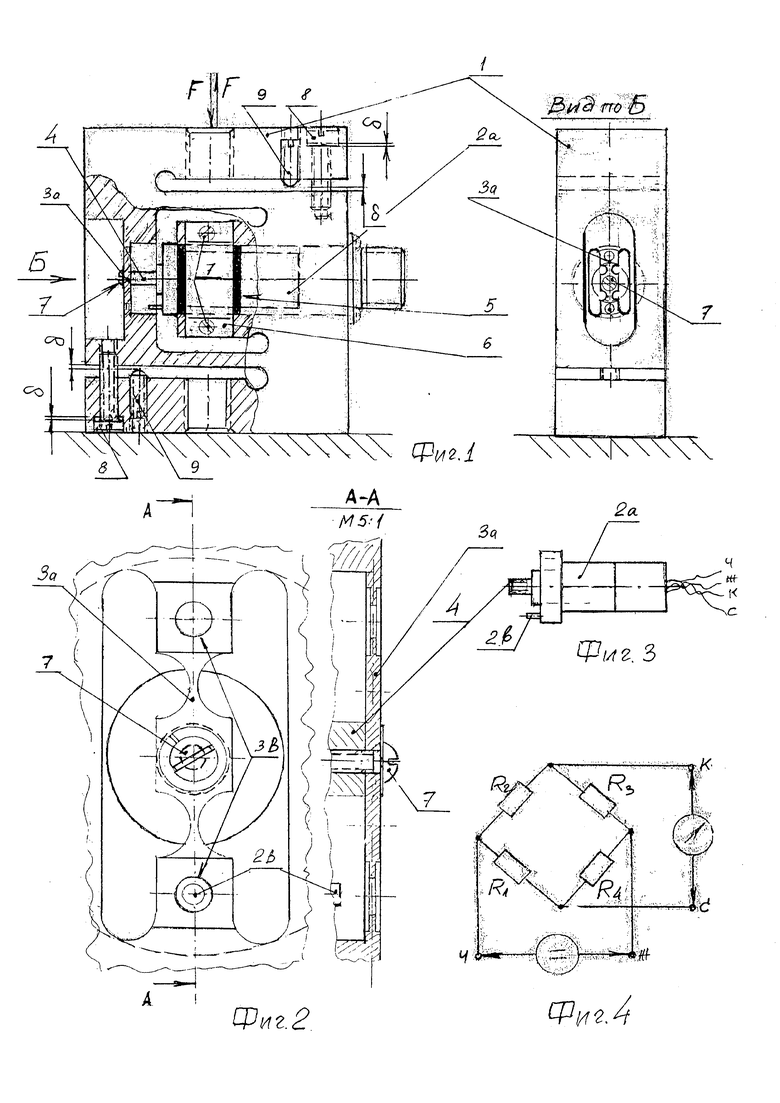
На фиг. 1 показан виды датчика спереди и слева; на фиг. 2 - тяга и ее сечение по А-А; на фиг. 3 - модуль С 05; на фиг. 4 - его электрическая схема. Обозначения на фигурах: 1 - упругий элемент; 2а - модуль С 05; 2в - реперный цилиндр; 3а - тяга; 3в - контрольные отверстия; 4 - рычаг модуля; 5 - резиновое с разрезом кольцо (на фиг. 1 оно почти все закрыто скобой); 6 - металлическая скоба; 7 - винты для крепежа скобы и тяги; 8 - ограничители; 9 - упоры; F - измеряемая сила; (ч-ж) - клеммы питания моста (Епит); (к-с) - клеммы выходного сигнала (Uвых); δ - прогибы балок от силы, равной 1,25F. Работа датчика сводится к следующему: при воздействии на упругий элемент 1 измеряемой силы F, она через тягу 3 передается к рычагу 4 модуля, деформирующему мембрану, на которой закреплен мост тензорезисторов (на фиг. не показаны). При этом тензорезисторы R2, R4 воспринимают деформацию одного знака, a R1, R3 - другого (знак зависит от направления силы F), что приводит к разбалансу мостовой схемы, в результате: на выходной диагонали моста формируется сигнал Uвых пропорциональный измеряемой силе F. По величине выходного сигнала и определяют величину измеряемой силы. При измерении сил сжатия датчик не требует закрепления на месте установки, а при измерении сил растяжения его необходимо закреплять, либо использовать две серьги (на фиг. не показаны). Для исключения возможных перегрузок при растяжении предусмотрены ограничители 8 в верхней и нижней опорной площадке, при сжатии - упоры 9. Для точной установки модуля в упругом элементе 1 и контроля при его креплении скобой 6 необходимо через одно из отверстий 3в в тяге контролировать соосность совмещения центров контрольного отверстия и реперного цилиндра 2в.
Датчик имеет следующие преимущества в сравнении с известными:
1. Повышена точность и надежность измерений и снижены температурные погрешности за счет монолитного исполнения упругого элемента и тяги, изготовленных, как и модуль С 05, из титанового сплава.
2. Повышена точность измерений благодаря точной установки модуля в параллелограмме за счет визуального контроля за соосным совмещением центров реперного цилиндра ∅ 2 мм и ближайшего отверстия на тяге ∅ 3 мм.
3. Повышена помехозащищенность датчика к паразитным моментам за счет использования профилированной тяги, фильтрующей изгибающие моменты.
4. Датчик становится универсальным и может измерять силу в двух направлениях, так как тяга одновременно связывает две балки параллелограмма и синхронно перемещается вслед за ними.
Источники, использованные автором при экспертизе:
1. Авт. свидетельство СССР № 1198398, М. Кл. G01L 1/22, 1985.
2.Заявка Франции № 2593286, G01L 1/18.
3. Пат. США № 3805604, 73-141 А, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения силы сжатия зубочелюстного аппарата при зубопротезировании | 2024 |
|
RU2825505C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2794992C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАЖИМА В ПРОЦЕССЕ НАПИСАНИЯ | 2023 |
|
RU2802158C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2819553C1 |
| ПОЛУПРОВОДНИКОВЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2829304C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2827676C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2802536C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2804254C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2815576C1 |
| РАСХОДОМЕР | 2024 |
|
RU2832834C1 |
Изобретение относится к измерительной технике, а конкретно к устройствам для измерения веса и силы. Упругий элемент датчика выполнен в виде параллелограмма из титанового сплава с двумя опорными площадками, в который встроен серийно выпускаемый тензомодуль С 05. Измеряемое усилие через тягу, сделанную за одно целое с упругим элементом и по центру закрепленную с концом рычага С 05, передается на рычаг, который деформирует мембрану и закрепленный на ней мост полупроводниковых тензорезисторов. При подаче напряжения на вход датчика и нагружении его силой (весом) на выходной диагонали моста формируется выходной сигнал, пропорциональный измеряемой силе. Технический результат заключается в повышении помехозащищенности, точности и надежности датчика, а также в простоте его изготовления. 2 з.п. ф-лы, 4 ил. 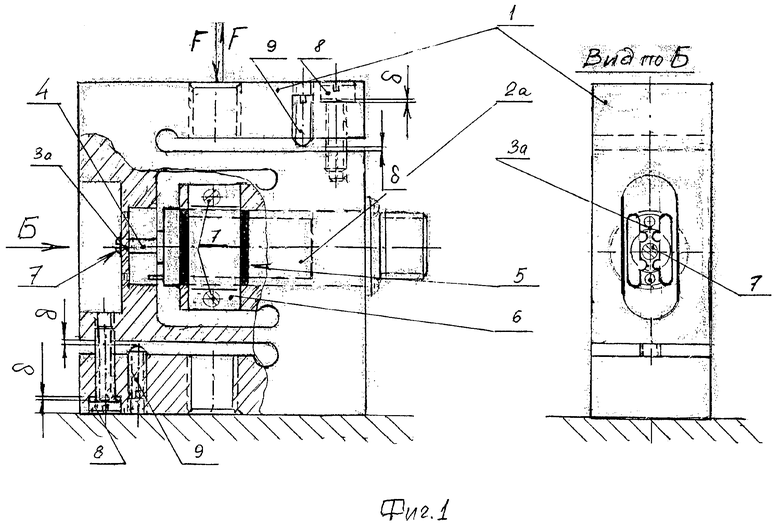
1. Тензорезисторный датчик силы (ТДС), содержащий параллелограммный упругий элемент, рычажный модуль и тягу, отличающийся тем,
что упругий элемент с опорными площадками и тяга выполнены за одно целое из титанового сплава, в качестве преобразователя использован серийно выпускаемый мембранно-рычажный тензопреобразователь С 05, который расположен в центре упругого элемента, так что его продольная ось совпадает с поперечной осью упругого элемента, при этом тяга, монолитно объединяющая верхнюю и нижнюю балки параллелограмма, по центру соединена с рычагом преобразователя.
2. ТДС по п. 1, отличающийся тем, что тяга выполнена с двумя участками в ее верхней части, профилированными вдоль ее продольной и поперечной оси, и двумя аналогичными участками в ее нижней части, при этом в центрах двух диаметрально расположенных участков тяги и в ее центре расположены три отверстия диаметром 3 мм каждый.
3. ТДС по п. 1, отличающийся тем, что центры двух диаметрально и симметрично расположенных отверстий тяги расположены по радиусу, на котором расположен центр реперного цилиндра модуля.
| US 3805604 A1, 23.04.1974 | |||
| ТЕРМОСИФОН | 2015 |
|
RU2593286C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2004 |
|
RU2308010C2 |
| Тензометрический датчик измерения нагрузки на ось грузового транспортного средства и система для измерения нагрузки на ось грузового транспортного средства | 2019 |
|
RU2711183C1 |

