Изобретение относится к измерительной технике, а именно к устройствам для измерения веса и силы.
Известен тензорезисторный датчик силы [1], содержащий упругий элемент (УЭ) в форме параллелограмма с мостом тензорезисторов (TP) и регулировочные резисторы. Недостатком такого датчика является незащищенность УЭ от паразитного крутящего момента, скручивающего обе балки параллелограмма, а также от реактивного момента в месте его крепления, что также влияет на точность измерения.
Наиболее близким по технической сущности к предлагаемому изобретению является датчик силы, состоящий из двух элементов [2]. В нем УЭ выполнен в виде балки двойного изгиба, которая вставлена в параллелограммный механизм. Этот датчик лучше защищен от паразитных крутящих моментов, связанных с эксцентриситетами прилагаемых нагрузок, но его метрологические характеристики значительно ниже из-за немонолитного исполнения параллелограммного механизма и нестабильного поведения защемленных концов балки.
Целями изобретения являются: повышение помехозащищенности и точности измерений, а также упрощение технологии изготовления и герметизации датчика.
Цели достигаются тем, что УЭ выполняется в форме шайбы, внутри которой располагается параллелограммный механизм, состоящий из двух параллельно работающих параллелограммов, одними концами монолитно связанных с периферией шайбы, а другими - с силовводящим узлом, монолитно объединяющим два параллелограмма в единое целое с шайбой.
Цели достигаются также тем, что параллелограммный механизм сформирован с помощью двух пазов «П»-образной формы, которые расположены встречно, и четырех глухих и одинаковых по диаметру отверстий с двух сторон шайбы, расположенных попарно - симметрично и параллельно оси O-O шайбы и перпендикулярно пазам, и связанных попарно глухими прорезями, которые расположены параллельно плоскостям шайбы.
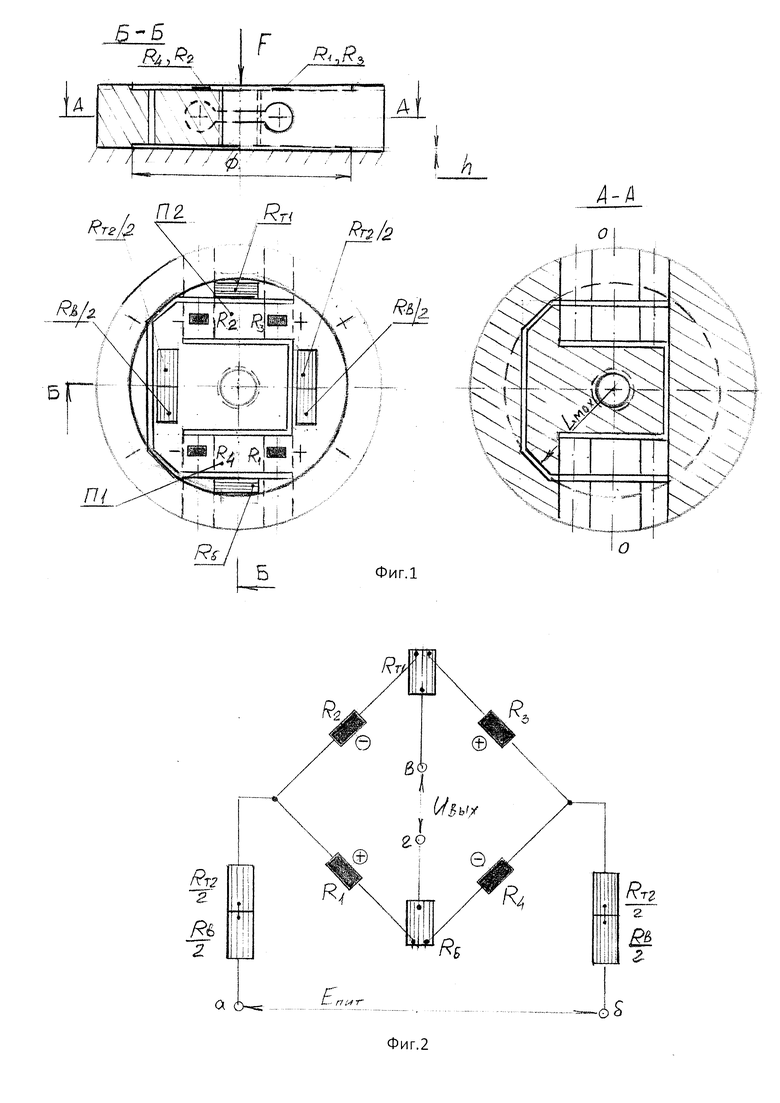
Для ограничения от перегрузки на двух сторонах шайбы сделаны освобождения, высота которых - h определяется прогибом параллелограммного механизма при воздействии полуторакратной номинальной нагрузки, а диаметр ∅ на 2 мм превышает наибольший двукратный размер L мах от центра до края параллелограммного механизма. На Фиг. 1 показаны виды датчика: спереди, сверху, сечение А-А, LMax, П1 и п2. На Фиг. 2 - эл. схема моста TP, регулировочные резисторы моста-Rб, Rт, Rт, Rв, (а-б)-напряжение питания моста-Епит., (в-г)-выходной сигнал датчика-Uвых.
Датчик состоит из двух монолитно связанных параллелограммов П1 и П2, на которых закреплены тензорезисторы R1 и R2 на П1 и R2 и R3 на П2. Параллелограммы П1 и П2 монолитно связаны одними концами с периферией шайбы, на которой располагаются резисторы Rб и Rт1, а другими концами - с силовводящим узлом, на котором закреплены резисторы Rч и Rт2.
Тензорезисторы R2 и R4 воспринимают деформацию одного знака, например, сжатия, a R1 и R4 другого - растяжения (знак зависит от направления силы). Между собой они соединены по мостовой схеме. Регулировочный резистор R6 служит для баланса моста, Rт1 для температурной компенсации нулевого сигнала, Rт2 для температурной компенсации выходного сигнала, a Rв для нормировки выходного сигнала. Для подавления синфазных помех RT2 и Rв разбиты на две части и включены в каждую из диагоналей питания моста.
Работа датчика сводится к следующему. При воздействии силы F параллелограммный механизм и тензорезисторы моста деформируются, Их сопротивления изменяются, например: у R2 и R4 - уменьшается, а у R1 и R3 - увеличивается. Это приводит к разбалансу мостовой схемы, в результате На выходной диагонали моста формируется выходной сигнал пропорциональный измеряемому усилию. По величине выходного сигнала судят о величине усилия F.
В случае воздействия измеряемого усилия как показано на Рис. 1 датчик можно не закреплять на месте его установки, при другом направлении усилия датчик следует закреплять, например, с помощью болтов. Для исключения возможных перегрузок с двух сторон шайбы сделаны освобождения, высота которых h определяется величиной прогиба конца параллелограммного механизма при нагружении датчика полуторакратной нагрузкой Fном, а диаметр ∅ освобождения должен на 2 мм превышать наибольший двукратный размер параллелограммного механизма.
Предлагаемый датчик силы имеет определенные преимущества в сравнении с известными, а именно:
1. Повышется его помехозащищенность от паразитных крутящих и изгибающих моментов.
2. Повышется точность измерения за счет монолитности всей конструкции датчика, а также с учетом пункта 1.
3. Упрощается технология изготовления и герметизации датчика за счет цилиндрической формы шайбы.
4. Возможна реализация группового метода изготовления.
Источники информации, принятые автором при экспертизе:
1. Авт. свидетельство №1198398, Мкл. G01L 1/22, 1985.
2. Пат. США №3805604, кл. 73-141, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2829565C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2813092C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2803391C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2023 |
|
RU2815576C1 |
| ГРУППОВОЙ СПОСОБ ИЗГОТОВЛЕНИЯ УПРУГИХ ЭЛЕМЕНТОВ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ СИЛЫ | 2022 |
|
RU2803024C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2022 |
|
RU2807002C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2023 |
|
RU2804254C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2819553C1 |
| ПОЛУПРОВОДНИКОВЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2829304C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2823571C1 |
Изобретение относится к области приборостроения и может быть использовано для создания точных, помехозащищенных, компактных и технологичных тензорезисторных датчиков для измерения веса и силы. Датчик может быть использован в весодозировочной технике и для коммерческого взвешивания, а также в испытательной технике для измерения сил в двух направлениях. Датчик выполнен в форме шайбы, внутри которой сформирован монолитно с ней связанный параллелограммный механизм, состоящий из двух параллельно работающих параллелограммов, которые одними концами монолитно связаны с периферией шайбы, а другими - с силовводящим узлом датчика. Параллелограммный механизм сформирован с помощью двух пазов П-образной формы, расположенных встречно, и четырех глухих одинаковых отверстий с двух сторон шайбы, расположенных попарно-симметрично и параллельно оси О-О шайбы и перпендикулярно пазам и попарно связанных глухими прорезями, расположенными параллельно плоскостям шайбы, на которых сделаны освобождения, высота которых h определяется прогибом параллелограммного механизма при воздействии полуторакратной номинальной нагрузки, а диаметры ∅ на два мм превышают наибольший двукратный размер от центра до края параллелограммного механизма. Технический результат - повышение помехозащищенности датчика от паразитных крутящих и изгибающих моментов на его входе, а также повышение точности измерений за счет монолитного исполнения всей конструкции. Цилиндрическая форма датчика позволяет упростить технологию изготовления и сделать ее групповой, а также упростить герметизацию датчиков с помощью профилированных мембран. 1 з.п. ф-лы, 2 ил.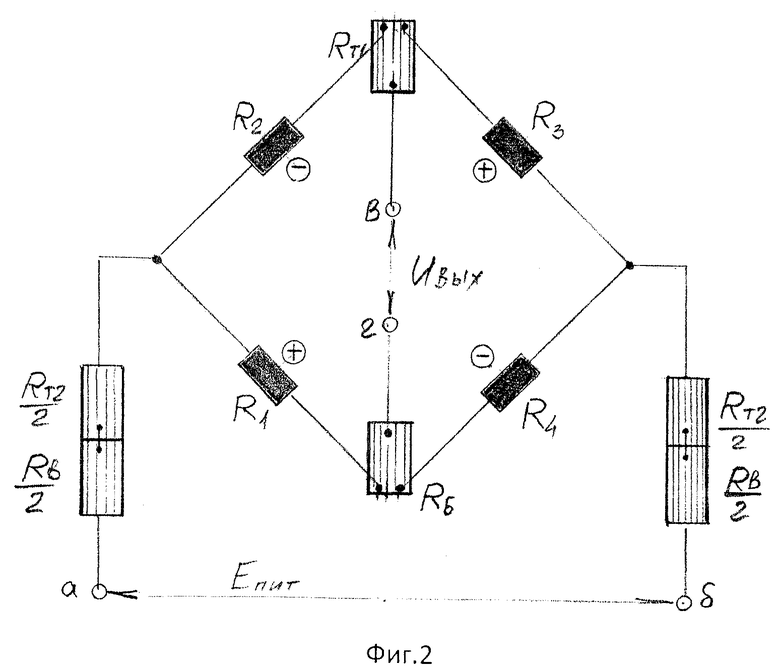
1. Тензорезисторный датчик силы (ТДС), содержащий упругий элемент, мост тензорезисторов и регулировочные резисторы, отличающийся тем, что датчик выполнен в форме шайбы, внутри которой расположен параллелограммный механизм, состоящий из двух параллельно работающих параллелограммов, одними концами монолитно связанных с периферией шайбы, а другими - с силовводящим узлом, монолитно объединяющим две ветви параллелограммного механизма.
2. ТДС по п. 1, отличающийся тем, что параллелограммный механизм сформирован с помощью двух пазов П-образной формы, расположенных встречно, и четырех глухих одинаковых отверстий с двух сторон шайбы, расположенных попарно-симметрично и параллельно оси О-О шайбы и перпендикулярно пазам и попарно связанных глухими прорезями, расположенными параллельно плоскостям шайбы, на которых сделаны освобождения, высота которых h определяется прогибом параллелограммного механизма при воздействии полуторакратной номинальной нагрузки, а диаметры ∅ на два мм превышают наибольший двукратный размер от центра до края параллелограммного механизма.
| ДАТЧИК СИЛЫ | 1990 |
|
RU2017094C1 |
| US 3805604 A1, 23.04.1974 | |||
| Тензорезисторный датчик силы | 1984 |
|
SU1198398A1 |
| "Тензометрический датчик силы "Ринта" | 1990 |
|
SU1820245A1 |
| СПОСОБ СОЕДИНЕНИЯ ТОНКОСТЕННЫХ ТРУБОПРОВОДОВ С ШЕВРОННЫМИ ГОФРАМИ | 1991 |
|
RU2049950C1 |

