УРОВЕНЬ ТЕХНИКИ
[0001] В этой заявке испрашивается приоритет предварительной заявки США № 62/985,989, поданной 6 марта 2020, озаглавленной «ДАТЧИКИ ИЗОБРАЖЕНИЯ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРЕГАТОВ И ПРОЦЕССОВ», и предварительной заявки США № 62/846,165, поданной 10 мая 2019, озаглавленной «ДАТЧИКИ ИЗОБРАЖЕНИЯ ДЛЯ СЕЛЬСКОГО ХОЗЯЙСТВА», каждая из которых полностью включена в настоящий документ посредством ссылки.
[0002] 1. Область техники
[0003] Настоящее изобретение в целом относится к сельскохозяйственным агрегатам. Более конкретно, варианты реализации настоящего изобретения относятся к сельскохозяйственным агрегатам, в которых используются датчики изображения.
[0004] 2. Обсуждение уровня техники
[0005] Сельскохозяйственные сеялки и сажалки хорошо известны тем, что равномерно распределяют семена сельскохозяйственных культур по полю. Обычные сеялки и сажалки выполнены с возможностью высеивания рядов семян за один проход путем открытия ряда борозд, внесения семян в борозды и затем закрытия борозд. Такие машины уровня техники обычно имеют ряд сошников для образования борозд и укладки семян. Такие машины также включают в себя дозирующие устройства для семян для подачи семян в сошники с заданной скоростью, а семена могут выдаваться как с разделением, так и без разделения. В данной области техники известно, что обычные сеялки могут быть выполнены с возможностью высадки семян таким образом, что на каждый фут или акр было высажено заданное количество семян.
[0006] Однако традиционное посевное и посадочное оборудование имеет ряд недостатков. Посевные и посадочные агрегаты уровня техники обычно склонны к неточной выдаче семян и сбоям в работе других типов. Для настройки расстояния между семенами и улучшения оседания семян в борозде используются пассивные методы. Например, известны механические дозаторы семян для пассивной настройки расстояния между семенами путем механического дозирования семян и их сбрасывания в борозду. Однако такие механические устройства являются неточными из-за износа и/или выхода из строя механических компонентов. Также известно использование датчиков для подсчета семян, продвигаемых в направлении к борозде. Однако обычные датчики в пневматических сеялках не могут точно подсчитывать семена, которые перемещаются мимо датчика. Известные датчики обнаруживают семена, которые переносятся из дозирующего устройства в почву, и определяют окончательный интервал на основании того, что обнаруживается при их переносе. Известно, что некоторые семена могут катиться или подпрыгивать, когда они выходят из транспортирующего устройства и попадают в борозду в почве. Однако датчики уровня техники неспособны обнаруживать или фиксировать эффект качения или отскока, воздействующий на конечное местоположение семян.
[0007] Известные сельскохозяйственные агрегаты для обработки почвы включают в себя один или более инструментов для работы с почвой, которые опираются на раму и выступают из нее для взаимодействия с землей во время обработки почвы. Обычные почвообрабатывающие агрегаты имеют регулируемые колеса, которые регулируются с помощью гидравлического исполнительного механизма для перемещения колес по вертикали относительно рамы.
[0008] Пахотные агрегаты уровня техники, особенно когда их используют перед посевом или посадкой, являются проблематичными по ряду причин. Например, традиционные системы обработки почвы не могут измерять или иным образом определять количество полевых отходов растительного материала, покрывающего землю, по которой прошел почвообрабатывающий агрегат. Известные системы для обработки почвы также не измеряют условия обработки почвы, такие как глубина обработки или качество почвы, по которой прошел почвообрабатывающий агрегат. Эти системы также не могут использовать такие данные для регулировки настроек почвообрабатывающего агрегата во время обработки почвы.
[0009] Это предварительное обсуждение предназначено для предоставления информации, относящейся к настоящему изобретению, которая не обязательно является уровнем техники.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0010] Следующее краткое изложение предоставлено для обозначения сущности раскрытого в настоящем документе предмета изобретения. Хотя определенные аспекты настоящего изобретения описаны ниже, данное краткое изложение не предназначено для ограничения объема охраны настоящего изобретения.
[0011] В вариантах реализации настоящего изобретения представлен агрегат, который устраняет проблемы и ограничения устройств уровня техники, включая те, которые изложены выше.
[0012] Первый аспект настоящего изобретения относится к высевающему агрегату для внесения семян в борозду, образованную в земле. Высевающий агрегат в целом включает в себя сошник, элемент распределения семян, времяпролетный датчик и контроллер. Сошник выполнен с возможностью образования борозды в земле. Элемент распределения семян выполнен с возможностью укладки семян в борозду. Времяпролетный датчик выполнен с возможностью получения информации, указывающей на один или более параметров семян, отложенных в борозду. Контроллер выполнен с возможностью обработки информации, полученной времяпролетным датчиком, для выработки одного или более параметров семян, при этом контроллер дополнительно выполнен с возможностью автоматического управления работой одного или более компонентов высевающего агрегата на основании одного или более параметров семян.
[0013] Второй аспект настоящего изобретения касается высевающего агрегата для внесения семян в борозду, образованную в земле. Высевающий агрегат в целом включает в себя сошник, элемент распределения семян, времяпролетный датчик и контроллер. Сошник выполнен с возможностью образования борозды в земле. Элемент распределения семян выполнен с возможностью укладки семян в борозду. Времяпролетный датчик выполнен с возможностью получения информации, указывающей на один или более параметров борозды. Контроллер выполнен с возможностью обработки информации, полученной времяпролетным датчиком, для выработки одного или более параметров борозда, при этом контроллер дополнительно выполнен с возможностью автоматического управления работой одного или более компонентов высевающего агрегата на основании одного или более параметров борозды.
[0014] Третий аспект настоящего изобретения относится к почвообрабатывающему агрегату для обработки почвы. Почвообрабатывающий агрегат в целом включает в себя раму, множество инструментов для работы с землей, по меньшей мере один времяпролетный датчик и контроллер. Рама поддерживается над землей одним или более колес. Инструменты опираются на раму и выполнены с возможностью взаимодействия с землей для обработки почвы. По меньшей мере один времяпролетный датчик выполнен с возможностью получения информации, указывающей на один или более параметров состояния почвы в земле. Контроллер выполнен с возможностью обработки информации, полученной времяпролетным датчиком, для выработки одного или более параметров состояния почвы, при этом контроллер дополнительно выполнен с возможностью автоматического управления работой одного или более компонентов почвообрабатывающего агрегата на основании одного или более параметров состояния почвы.
[0015] Четвертый аспект настоящего изобретения касается системы управления почвообрабатывающим агрегатом, выполненным с возможностью обработки почвы, при этом почвообрабатывающий агрегат включает в себя центральную секцию. Система управления включает в себя передний и задний датчики, узел выравнивания и контроллер. Передний датчик расположен на передней части центральной секции, при этом передний датчик выполнен с возможностью получения информации о высоте, указывающей высоту передней части центральной секции над землей. Задний датчик расположен на задней части центральной секции, при этом задний датчик выполнен с возможностью получения информации о высоте, указывающей высоту задней части центральной секции над землей. Узел выравнивания выполнен с возможностью регулировки ориентации центральной секции спереди назад. Контроллер выполнен с возможностью приема информации о высоте от переднего датчика и информации о высоте от заднего датчика, а также для предоставления инструкций узлу выравнивания для регулировки ориентации передней и задней частей центральной секции на основании полученной информации о высоте.
[0016] Пятый аспект настоящего изобретения касается способа работы почвообрабатывающего агрегата, выполненного с возможностью обработки почвы, при этом почвообрабатывающий агрегат включает в себя центральную секцию. Способ включает этапы: получения посредством переднего датчика, расположенного на передней части центральной секции, информации о высоте, указывающей высоту передней части центральной секции над землей; получения посредством заднего датчика, расположенного на задней части центральной секции, информации о высоте, указывающей высоту задней части центральной секции над землей; сравнения посредством контроллера высоты передней части центральной секции с высотой задней части центральной секции; и предоставления инструкций для узла выравнивания, связанного с центральной секцией, для регулировки ориентации передней части относительно задней части центральной секции на основании сравнения, выполненного на этапе (c).
[0017] Настоящее раскрытие сущности изобретения приведено для предоставления выбора концепций в упрощенной форме, которые также описаны ниже в подробном описании. Настоящее раскрытие сущности изобретения не предназначено для определения ключевых или существенных признаков заявленного предмета и не предназначено для использования с целью ограничения объема охраны заявленного предмета изобретения. Другие аспекты и преимущества настоящего изобретения будут понятны из приведенного ниже подробного описания вариантов реализации и сопроводительных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Предпочтительные варианты реализации настоящего изобретения подробно описаны ниже со ссылкой на фигуры сопроводительных чертежей, на которых:
[0019] На ФИГ. 1 представлен фрагментарный схематический вид сбоку высевающего агрегата, сконструированного в соответствии с первым предпочтительным вариантом реализации настоящего изобретения, показывающий узел сошника, используемый для внесения семян в борозду через семяпровод, и времяпролетный датчик для получения информация о внесенных в почву семенах;
[0020] На ФИГ. 1А представлен схематический вид высевающего агрегата, показанного на ФИГ. 1, показывающий контроллер, функционально связанный с узлом сошника и датчиком;
[0021] На ФИГ. 1B представлен фрагментарный схематический вид сбоку альтернативного высевающего агрегата, аналогичного показанному на ФИГ. 1, но показывающий семяпровод, замененный подающим транспортером, который переносит семена в борозду;
[0022] На ФИГ. 2 представлен фрагментарный вид сбоку высевающего агрегата, показанной на ФИГ. 1, 1A и 1B, на котором показана рама, ножи сошника и заделочные колеса сеялки в сборе, а также показаны местоположения для установки датчика над бороздой;
[0023] На ФИГ. 2A представлен фрагментарный вид высевающего агрегата, показанной на ФИГ. 1-2, если смотреть в заднем направлении, показывающий семена в борозде и борозду, закрываемую над семенами;
[0024] На ФИГ. 3 представлен схематический вид в разрезе спереди борозды, показанной на ФИГ. 1-2A, показывающий форму профиля борозды, включая ширину борозды, глубину борозды и угол борозды, а также показывающий глубину посева;
[0025] На ФИГ. 4 представлен схематический вид сбоку в разрезе борозды, показанной на ФИГ. 1-3, показывающий расстояние между семенами, измеренное вдоль длины борозды между соседними семенами;
[0026] На ФИГ. 5 представлен схематический вид пользовательского интерфейса, функционально связанного с высевающим агрегатом для приема информации от датчика, показывающий графическое изображение параметров борозды, полученных от датчика, включая ширину борозды, глубину борозды и профиль борозды, а также дополнительно отображающий параметры семян, полученные от датчика, включая пропуски семян, дублирование семян, глубину заделки семян и расстояние между семенами;
[0027] На ФИГ. 6 представлен схематический вид пользовательского интерфейса, подобного показанному на ФИГ. 5, но с изображенными параметрами борозды, указывающими на то, что измеренная ширина борозды превышает максимальную целевую ширину борозды;
[0028] На ФИГ. 7 представлен вид сзади в перспективе почвообрабатывающего агрегата, сконструированного в соответствии со вторым предпочтительным вариантом реализации настоящего изобретения, показывающий основную раму, колеса, гидравлические исполнительные механизмы, выравнивающий узел, а также переднюю и заднюю группы ножей сошников;
[0029] На ФИГ. 8 представлен фрагментарный вид спереди почвообрабатывающего агрегата, показанного на ФИГ. 7, показывающий центральную секцию, левую внутреннюю боковую секцию и левую наружную боковую секцию, при этом боковые секции могут складываться и раскладываться относительно центральной секции с помощью гидравлических исполнительных механизмов;
[0030] На ФИГ. 9A представлен фрагментарный вид сбоку почвообрабатывающего агрегата, показанного на ФИГ. 7 и 8, показывающий узел выравнивания, используемый для выравнивания почвообрабатывающего агрегата в продольном направлении;
[0031] На ФИГ. 9B представлен фрагментарный вид сбоку почвообрабатывающего агрегата, аналогичного показанному на ФИГ. 9A, но показывающий финишные ролики за задними рядами ножей сошников;
[0032] На ФИГ. 10A представлен фрагментарный вид сверху почвообрабатывающего агрегата, показанного на ФИГ. 7-9B, на котором показаны передняя и задняя группы ножей сошников с нулевым углом группы;
[0033] На ФИГ. 10B представлен фрагментарный вид сверху почвообрабатывающего агрегата, аналогичного показанному на ФИГ. 10A, но показывающий передние группы ножей сошников, смещенные так, что угол группы больше нуля;
[0034] На ФИГ. 11 представлен вид спереди почвообрабатывающего агрегата, показанного на ФИГ. 7-10B;
[0035] На ФИГ. 12 представлен вид сзади почвообрабатывающего агрегата, показанного на ФИГ. 7-11;
[0036] На ФИГ. 13 представлен схематический вид почвообрабатывающего агрегата, показанного на ФИГ. 7-12, показывающий цилиндры агрегата, функционально соединенные с гидравлической питающей системой и контроллером; и
[0037] На ФИГ. 14 представлен схематический вид почвообрабатывающего агрегата, показанного на ФИГ. 7-13, показывающий контроллер, функционально связанный с пользовательским интерфейсом, датчиками высоты, датчиками полевых отходов и датчиками температуры.
[0038] Чертежи на фигурах не ограничивают настоящее изобретение конкретными вариантами реализации, раскрытыми и описанными в настоящем документе. Хотя чертежи не обязательно обеспечивают точные размеры или допуски для показанных компонентов или конструкций, чертежи, не включая какие-либо чисто схематические чертежи, даны в масштабе относительно соотношений между компонентами конструкций, показанных на них.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ
[0039] Следующее подробное описание вариантов реализации настоящего изобретения ссылается на сопроводительные чертежи. Варианты реализации предназначены для описания аспектов изобретения достаточно подробно для осуществления изобретения специалистом в данной области техники. Варианты реализации настоящего изобретения показаны в качестве примера, а не в качестве ограничения. Могут использоваться другие варианты реализации, и могут быть внесены изменения без отклонения от объема охраны формулы изобретения. Поэтому следующее описание не является ограничивающим. Объем охраны настоящего изобретения определен исключительно приложенной формулой, а также полным объемом эквивалентов, присущим формуле изобретения.
[0040] В этом описании ссылки на «один вариант реализации», «вариант реализации» или «варианты реализации» означают, что указанный признак или признаки включены по меньшей мере в один вариант реализации изобретения. Отдельные ссылки на «один вариант реализации», «вариант реализации» или «варианты реализации» в этом описании не обязательно относятся к одному и тому же варианту реализации и не являются взаимоисключающими, если не указано иное. В частности, признак, компонент, действие, этап и т.п., описанные в одном варианте реализации, также могут быть включены в другие варианты реализации, но не обязательно. Таким образом, конкретные варианты реализации настоящего изобретения могут включать в себя множество сочетаний и/или объединений вариантов реализации, описанных в данном документе.
Высевающий агрегат
[0041] Как показано на ФИГ. 1, сельскохозяйственный высевающий агрегат выполнен с возможностью укладки семян S в ряд борозд F, образованных в земле G и равномерно проходящих по полю. Высевающий агрегат может быть выполнен с возможностью внесения семян различных сельскохозяйственных культур и может быть выполнен в различных видах сельскохозяйственных сеялок, сажалок и/или рядковых сеялок. Варианты реализации высевающего агрегата 10 также могут быть выполнены с возможностью внесения семян на разную глубину и/или с разными интервалами посадки.
[0042] Высевающий агрегат 10 можно тянуть по полю (которое может включать в себя один или более участков почвы) для внесения семян в борозды. Агрегат 10 предпочтительно продвигается с помощью буксирующего транспортного средства (не показано), такого как трактор. В различных вариантах реализации буксирующее транспортное средство может включать в себя управляемое оператором транспортное средство или автономное транспортное средство для продвижения агрегата. В целом, согласно различным вариантам реализации агрегат предпочтительно буксируют позади транспортного средства, хотя элементы агрегата могут быть альтернативно расположены относительно транспортного средства (например, с одной стороны транспортного средства или перед транспортным средством).
[0043] В изображенном варианте реализации высевающий агрегат 10 предпочтительно включает в себя помимо прочего основную раму (не показана), узел 12 сошника, времяпролетный датчик 14 и контроллер 16 (см. ФИГ. 1 и 1A). Хотя это не показано, высевающий агрегат 10 предпочтительно включает в себя множество узлов 12 сошников, расположенных в поперечном направлении по ширине высевающего агрегата 10. Каждый узел 12 сошника предпочтительно имеет по меньшей мере один соответствующий времяпролетный датчик 14, связанный с ним.
[0044] Термины направления, используемые в спецификации, такие как «передний/вперед», «задний/сзади/назад», «левый» и «правый», даны с точки зрения человека, стоящего позади агрегата и смотрящего вперед. По существу, например, агрегат может включать в себя сцепное дышло (не показано) в передней части агрегата, выступающее вперед из основной рамы, для сцепления агрегата с буксирующим транспортным средством. Кроме того, агрегат обычно выполнен для перемещения в прямом направлении, поскольку он приводится в движение тягачом. Используемый здесь термин «продольный» обычно относится к направлению вперед и/или назад по отношению к навесному оборудованию. Таким образом, продольное направление обычно параллельно направлению перемещения. Напротив, термин «боковой» обычно относится к направлению вправо и/или влево по отношению к агрегату. Таким образом, боковое направление обычно перпендикулярно направлению перемещения.
[0045] Как показано на ФИГ. 1-6, высевающий агрегат 10 предпочтительно включает в себя множество узлов 12 сошников. В частности, каждый узел 12 сошника предпочтительно прикреплен к проходящему в боковом направлении навесному брусу (не показан) основной рамы. В показанном варианте реализации каждый узел 12 сошника предпочтительно включает в себя раму 20 сошника, сошник 22, хвостовик 24 уплотнителя, заделочные колеса 26 и элемент 28 распределения семян (см. ФИГ. 2).
[0046] Варианты реализации сошника 22 предпочтительно включают в себя пару ножей 30 сошника, которые с возможностью вращения поддерживаются рамой 20 сошника и выполнены с возможностью создания борозды F в почве G. Понятно, что ножи сошника могут иметь различную конфигурацию для образования борозды F.
[0047] Высевающий агрегат 10 помимо прочего предпочтительно выполнен с возможностью настройки положения ножей 30 сошника и заделочных колес 26 для образования борозды желаемой ширины и глубины, а также обеспечения соответствующей глубины заделки семян (см. ФИГ. 3). Одну или более других настроек высевающего агрегата также можно регулировать для управления аспектами желаемой формы профиля поперечного сечения борозды, например, угла борозды (см. ФИГ. 3). Как будет объяснено ниже, высевающий агрегат 10 предпочтительно выполнен с возможностью управления шириной борозды, глубиной борозды и/или формой профиля борозды.
[0048] Элемент 28 распределения семян выполнен с возможностью внесения семян S в борозду F и предпочтительно включает в себя семяпровод 32 рядом с ножами 30 сошника. Обычно семяпровод 32 имеет выпускное отверстие 34, расположенное в боковом направлении между ножами 30 сошников, так что семена S направляются в борозду F. Однако по меньшей мере в некоторых аспектах настоящего изобретения высевающий агрегат имеет альтернативное устройство распределения семян. Например, как показано на ФИГ. 1B, высевающий элемент 10 может иметь узел 36 подающего транспортера, который переносит семена в борозду. Узел 36 подающего транспортера включает в себя петлевой транспортер 36a, который в рабочем состоянии поддерживается колесами 36b транспортера. Предпочтительно петлевой транспортер 36a имеет ряд транспортирующих элементов 36c, которые зацепляют посевной материал. Петлевой транспортер 36 выполнен с возможностью выдвижения, чтобы сбрасывать или вносить семена в борозду.
[0049] Высевающий агрегат 10 предпочтительно оборудован дозатором семян (не показан) для регулируемой настройки скорости высева семян S из семяпровода 32. Варианты реализации высевающего агрегата предпочтительно выполнены с возможностью внесения отдельных семян, имеющих заданную величину D расстояния между семенами, которое определяется между соседними парами семян S (см. ФИГ. 4). Также понятно, что варианты реализации высевающего агрегата могут использоваться для выдачи неразделенных групп семян.
[0050] Хотя это не показано, варианты реализации высевающего агрегата могут иметь распределительный элемент, выполненный с возможностью внесения других подобных семенам объектов (таких как гранулы удобрений, гранулы пестицидов или гранулы питательных веществ) в борозду. Например, трубка для удобрений может иметь конфигурацию и/или положение, аналогичное семяпроводу, для направления гранулированных удобрений в борозду. Агрегат может быть выполнен таким образом, что количество гранул удобрений (или других объектов, не являющихся семенами), выпускаемых из распределительного элемента, можно регулировать.
Датчики
[0051] Высевающий агрегат 10 предпочтительно включает в себя по меньшей мере один времяпролетный датчик 14, связанный с узлом 12 сошника. В частности, в вариантах реализации настоящего изобретения может использоваться датчик 14, такой как камера, выполненный с возможностью получения и/или выполнения измерений глубины, связанных с бороздой F, семенами S, уложенными в борозду F, и/или другими уложенными объектами, не являющимися семенами, вдоль борозды F.
[0052] Как показано на ФИГ. 2, в изображенном варианте реализации предпочтительный времяпролетный датчик 14a предпочтительно расположен между заделочным колесом и ножом сошника. В частности, времяпролетный датчик 14a установлен на хвостовике 24 уплотнителя в местоположении после колес 30 сошника.
[0053] Как показано на ФИГ. 2, в объем настоящего изобретения также входит размещение одного или более времяпролетных датчиков 14b в альтернативных местоположениях для получения и/или выполнения измерений глубины борозды, семян и т.п. Например, один или более времяпролетных датчиков 14b могут поддерживаться относительно рамы 20 сошника в альтернативных положениях между ножом сошника и заделочным колесом (см. ФИГ. 2).
[0054] Предполагается, что предпочтительный узел 12 сошника может быть связан с одним времяпролетным датчиком 14, который может быть расположен в одном из показанных положений или в другом положении относительно рамы 20 сошника. Однако по меньшей мере для некоторых аспектов настоящего изобретения узел 12 сошника может иметь множество датчиков 14, поддерживаемых относительно рамы 20 сошника, для получения измерений борозды, семян и т.п. Множество датчиков 14 могут быть расположены в соответствующих из показанных положений или других положениях относительно рамы 20 сошника. Следует понимать, что ориентация каждого датчика 14 может различаться среди различных положений датчика, например, для оптимизации отслеживания борозды и/или семян.
[0055] Каждый времяпролетный датчик 14 предпочтительно выполнен с возможностью получения информации, указывающей на один или более параметров борозды F. Кроме того, каждый времяпролетный датчик 14 выполнен с возможностью получения информации, указывающей один или более параметров семян S, высеваемых в борозду F, как объяснено ниже. В рамках настоящего изобретения один или более датчиков 14 могут быть ориентированы так, чтобы смотреть назад, в сторону задней части открытой борозды, где борозда заделывается поверх семян S, и такой вид сзади показан на ФИГ. 2A. Эта ориентация датчика 14 в заднем направлении позволяет датчику 14 видеть семена S, когда они покрываются почвой, и точно определять глубину семян в борозде F ниже финишного уровня поверхности.
[0056] В предпочтительных вариантах реализации настоящего изобретения времяпролетный датчик 14 может содержать времяпролетную камеру. Времяпролетная камера предпочтительно может использовать монохроматическое освещение и/или многоволновое освещение. Времяпролетная камера предпочтительно может работать в ультрафиолетовом спектре, инфракрасном спектре и/или в видимом спектре. В предпочтительной камере могут использоваться светодиодные источники света и/или лазерные источники света. Предпочтительная камера может включать в себя фотоэлементы.
[0057] Варианты реализации настоящего изобретения дополнительно или альтернативно могут иметь времяпролетные датчики 14, которые включают в себя датчик, содержащий массив чувствительных пикселей для определения местоположения объектов в трехмерном пространстве, например, времяпролетную камеру, датчики LiDAR, радиолокационные датчики, ультразвуковые датчики и/или гидролокационные датчики. Каждый времяпролетный датчик 14 выполнен с возможностью выработки времяпролетных изображений борозды F и семян S, отложенных в борозде F. Каждый времяпролетный датчик 14 также выполнен с возможностью отслеживания положения объектов, не являющихся семенами, которые могут включать в себя гранулы удобрений, пестицидов или питательных веществ.
[0058] Один или более времяпролетных датчиков 14 также могут включать в себя камеру RBG или могут быть связаны с камерой RBG, выполненной с возможностью получения изображений RGB семян и/или борозды.
[0059] Определение местоположения семенных объектов на изображениях камеры может быть осуществлено с использованием: (i) созданных человеком традиционных алгоритмов машинного зрения; и (ii) методов нейронной сети с глубоким обучением и компьютерно-оптимизированных алгоритмов обнаружения объектов. Эти алгоритмы выполнены с возможностью обработки контроллером 16, который может включать в себя компьютер с электронным блоком управления (ЭБУ), как описано ниже.
[0060] В вариантах реализации настоящего изобретения времяпролетный датчик 14 обеспечивает камеру глубины для определения местоположения объекта и расстояния относительно других объектов. Данные о местоположении объекта и расстоянии от датчика 14 могут быть использованы для построения матрицы значений глубины, соответствующих пикселям на матрице камеры (которая обычно известна как карта глубины). Объединение камер глубины с обнаружением объекта означает, что объект может быть обнаружен и измерен с получением параметров, показанных на ФИГ. 5 и 6. Приложения включают подсчет семян, измерения местоположения семян в процессе посадки, скорость семян и удары о почву (например, для определения отскока семян и/или укладки в желаемом месте). Глубина, ширина и угол борозды могут измеряться на протяжении всего процесса посадки.
[0061] Варианты реализации настоящего изобретения могут использовать картографирование глубины в ближнем инфракрасном диапазоне на основании времени пролета для генерирования сигналов обратной связи для посева семян. Карты глубины могут накладываться на изображения камеры RGB для различения цветов и обеспечения большего количества данных для повышения точности. Помимо времени пролета, карты глубины также могут быть сгенерированы с использованием стереоскопических изображений (двойные камеры) или структурированного света, который может дать аналогичные результаты, но использование времени пролета может быть оптимальным для вариантов случаев применения настоящего изобретения, учитывающих состояние современной технологии камер глубины.
[0062] Технология определения дальности по времени пролета (например, LiDAR) может использоваться для сбора пространственных данных о семенах S в процессе посева. Принципы построения изображений на основании времени пролета могут использовать монохроматическое или многоволновое искусственное освещение в диапазоне от ультрафиолетового (УФ) до инфракрасного (ИК) излучения. Лазерное освещение и светодиодное освещение являются предпочтительными источниками света для измерения глубины, которые могут использоваться с пассивными датчиками фотодетектирования. Расстояния до светоотражающих поверхностей можно определять путем измерения времени между включением источника освещения и задержкой до возвращения отраженного света к фотодетекторным датчикам, используя скорость света в качестве фиксированного эталона.
[0063] Для изображенных датчиков 14 и других датчиков, связанных с настоящим изобретением, следует понимать, что пыль, частицы и другие загрязнения могут мешать работе датчика. Например, посторонние частицы могут оседать на объектив камеры или зависать рядом с объективом. В рамках настоящего изобретения устройство должно быть снабжено приводным пневматическим устройством, способным удалять частицы с объектива камеры путем направления потока воздуха на объектив или рядом с ним.
Пользовательский интерфейс и параметры
[0064] Данные, полученные от датчиков 14, можно использовать для выработки и отображения одного или более параметров борозды. Параметры борозды предпочтительно включают в себя один или более из следующих параметров: ширина борозды, глубина борозды и/или качество борозды. Качество борозды может включать в себя один или более из следующих параметров: угол боковой стенки борозды, форма борозды и/или обрушение борозды (для указания возможного разрушения по меньшей мере части боковой стенки борозды).
[0065] Высевающий агрегат 10 также предпочтительно включает в себя пользовательский интерфейс 40, функционально связанный с контроллером 16 и выполненный с возможностью отображения одного или более параметров борозды для оператора высевающего агрегата (см. ФИГ. 1, 5 и 6). Как обсуждается ниже, оператору может быть отображено предупреждение (например, посредством пользовательского интерфейса 40), если параметр борозды превышает соответствующее целевое значение параметра или диапазон этих значений.
[0066] Пользовательский интерфейс 40 предпочтительно включает в себя элемент 42 графического отображения, элемент 44 отображения формы профиля и элемент 46 отображения данных. Элемент 42 графического отображения выполнен с возможностью графического отображения измеренной ширины борозды. В частности, измеренная ширина борозды обозначается индикатором 48 линии края борозды, индикатором 50 линии ширины борозды и индикатором 52 данных о ширине борозды. Элемент 42 графического отображения также выполнен с возможностью графического отображения измеренной глубины борозды. В частности, измеренная глубина борозды обозначается индикатором 54 нижней линии борозды и индикатором 56 данных о глубине борозды.
[0067] Элемент 42 графического отображения также предпочтительно выполнен с возможностью отображения индикаторов 58 изображения камеры (показаны схематично), показывающих изображение борозды, семян и т.п. В показанном варианте реализации элемент 42 графического отображения выполнен с возможностью наложения индикаторов 48, 50, 52, 54, 56 на индикатор 58 изображения камеры. Предпочтительно индикаторы 48, 50, 52, 54, 56 выполнены с возможностью наложения в ассоциации с соответствующими признаками борозды на индикатор 58 изображения камеры. Например, индикаторы 48 линии края борозды предпочтительно накладываются на соответствующие края борозды, изображенные на индикаторах 58 изображения камеры, или рядом с ними.
[0068] Элемент 44 отображения формы профиля выполнен с возможностью графического изображения измеренного профиля борозды, включая боковые стенки борозды и угол борозды. Предпочтительно профиль борозды изображается индикатором 60 профиля. Элемент 46 отображения данных выполнен с возможностью предоставления списка измеренных данных и включает в себя индикаторы 62 названия данных и индикаторы 64 данных. Индикаторы 64 данных предпочтительно представляет данные датчика, связанные с измерениями датчика.
[0069] Как описано более подробно ниже, в рамках настоящего изобретения контроллер 16 и пользовательский интерфейс 40 должны быть обеспечены как часть вычислительного устройства агрегата 10. Все или некоторые компоненты вычислительного устройства могут быть расположены в кабине буксирующего транспортного средства или иным образом связаны с буксирующим транспортным средством.
[0070] Предпочтительный пользовательский интерфейс 40 будет иметь электронный дисплей, такой как электронно-лучевая трубка, жидкокристаллический дисплей, плазменный или сенсорный экран, который может отображать визуальную графику, изображения, текст и т.п. В определенных вариантах реализации компьютерная программа, связанная с пользовательским интерфейсом 40, способствует взаимодействию и связи посредством графического пользовательского интерфейса (GUI), который отображается посредством электронного дисплея. Графический интерфейс пользователя позволяет пользователю взаимодействовать с электронным дисплеем, касаясь или указывая пальцами на области дисплея, для предоставления информации пользовательскому интерфейсу 40. В дополнительных предпочтительных вариантах реализации вычислительное устройство также может включать в себя оптическое устройство, такое как цифровая камера, видеокамера, оптический сканер и т.п., так что вычислительное устройство может захватывать, хранить и передавать цифровые изображения и/или видео.
[0071] В рамках настоящего изобретения агрегат 10 позволяет проверять глубину борозды, ширину борозды и/или качество борозды. В частности, контроллер 16 предпочтительно выполнен с возможностью определения того, соответствует ли ширина фактической борозды, образованной агрегатом 10, целевому значению ширины борозды или находится в пределах целевого диапазона ширины борозды. Например, оператор может быть предупрежден (например, посредством пользовательского интерфейса 40) о том, что измеренная ширина борозды слишком велика по сравнению с желаемой шириной борозды (см. ФИГ. 6) или слишком мала.
[0072] Аналогичным образом, контроллер 16 предпочтительно выполнен с возможностью определения того, соответствует ли глубина фактической борозды, образованной агрегатом 10, целевому значению глубины борозды или находится в пределах целевого диапазона глубины борозды. Оператор также может быть предупрежден (например, посредством пользовательского интерфейса 40) о том, что измеренная глубина борозды слишком велика или слишком мала по сравнению с желаемой глубиной борозды.
[0073] Кроме того, контроллер 16 предпочтительно выполнен с возможностью определения формы профиля фактической борозды и определения того, имеет ли фактическая борозда, образованная агрегатом 10, боковую стенку борозды, которая разрушается. Оператор может быть предупрежден (например, посредством пользовательского интерфейса 40) о том, что определено разрушение измеренной борозды до приближения заделочных колес. Как показано на ФИГ. 5 и 6, форму или профиль борозды можно измерять и отображать как поперечное сечение в пользовательском интерфейсе 40 индикатором 60 профиля борозды.
[0074] Описанные предупреждения предпочтительно предоставляются оператору посредством пользовательского интерфейса 40 для того, чтобы оператор мог предпринять действия (например, путем внесения изменений в работу агрегата 10) для способствования продолжению работы агрегата или остановки работы агрегата. Однако также следует понимать, что контроллер 16 может быть выполнен с возможностью автоматического управления высевающим агрегатом 10 и выполнения действий, способствующих продолжению работы агрегата или остановки работы агрегата без вмешательства оператора.
[0075] Варианты реализации предпочтительного агрегата 10 могут быть выполнены с возможностью обеспечения измерений и отслеживания фактических размеров борозды на протяжении всего процесса посева. Кроме того, агрегат 10 может быть функционально связан с системой автономного привода (агрегата или буксирующего транспортного средства) для регулировки агрегата 10, если глубина борозды не соответствует заданной настройке глубины. Профили борозды можно отслеживать таким образом, что если борозда сжимается или становится слишком широкой, система привода или оператор будут об этом предупреждены.
[0076] Варианты реализации настоящего изобретения также могут обнаруживать и измерять параметры состояния почвы, такие как процент полевых отходов и шероховатость почвы. Оператор может выбирать целевой уровень уменьшения шероховатости почвы и полевых отходов. Варианты реализации настоящего изобретения могут предоставлять средства для измерения и предупреждения оператора, если настройки агрегата соответствуют намеченным целям.
[0077] Данные карты глубины могут использоваться в вариантах реализации настоящего изобретения для измерения показателей состояния почвы, относящихся к эффективному посеву сельскохозяйственных культур, путем измерения изменений, на которые влияют ручные или автоматические регулировки посевного оборудования для улучшения и контроля посева при различных физических условиях. Параметры состояния почвы могут быть определены из изображений, полученных от камеры, с использованием: (i) созданных человеком традиционных алгоритмов машинного зрения; и (ii) методов нейронной сети с глубоким обучением и компьютерно-оптимизированных алгоритмов обнаружения объектов. Более подробно использование параметров состояния почвы описано в следующем варианте реализации.
[0078] Высевающий агрегат 10 согласно настоящему изобретению может предоставлять в реальном времени данные о параметрах семян, связанные с семенами S. В предпочтительных вариантах реализации параметры семян могут включать в себя данные о местоположениях семян S в борозде. Такие параметры местоположения семян могут включать в себя глубину семян и боковое положение семян. Параметры местоположения семян также могут включать в себя расстояние между семенами, пропуски семян и дублирование семян. Контроллер 16 предпочтительно выполнен с возможностью использования этих параметров местоположения семян для определения того, была ли соседняя пара семян неправильно уложена рядом друг с другом.
[0079] Параметры семян также могут включать в себя количество семян S, укладываемых в борозду, скорость укладывания семян S в борозду, положение при ударе семян S, укладываемых в борозду, и окончательное положение покоя семян S, уложенных в борозде. Пропуск семян предпочтительно идентифицируется, когда измеренный размер промежутка между соседними семенами больше, чем целевой размер промежутка между семенами. Например, пропуск семян может быть идентифицирован, когда измеренный размер расстояния между семенами по меньшей мере в два раза больше целевого размера расстояния между семенами. Дублирование семян предпочтительно идентифицируется, когда измеренный размер расстояния между соседними семенами меньше целевого размера расстояния между семенами. Например, дублирование семян может быть идентифицировано, когда измеренный размер расстояния между семенами меньше половины целевого размера расстояния между семенами.
[0080] Высевающий агрегат 10 выполнен с возможностью обнаружения семян S, когда семена S попадают в борозду, и измерения глубины относительно верха борозды, что позволяет количественно оценивать глубину посева. Точно так же, варианты реализации могут измерять расстояние между семенами (разнесение семян) и обнаруживать неоптимальные посевные характеристики высевающей секции. Пользовательский интерфейс 40 (или другое устройство) может предупреждать оператора о параметрах, включая: пропущенные семена (пропуски), добавленные семена (двойные), плохой интервал и/или семена, не обнаруженные в борозде F. Подобные измерения и предупреждения оператора также могут быть предусмотрены для других подобных семенам объектов, таких как гранулированные удобрения.
[0081] Описанные предупреждения предпочтительно предоставляются оператору посредством пользовательского интерфейса 40, так что оператор может предпринять действия (например, путем внесения корректировок в работу агрегата) для способствования продолжению работы агрегата или остановки работы агрегата. Однако также следует понимать, что контроллер 16 может быть выполнен с возможностью автоматического управления высевающим агрегатом 10 и выполнения действий, способствующих продолжению работы агрегата или остановки работы агрегата без вмешательства оператора.
[0082] В пользовательском интерфейсе 40 элемент 42 графического отображения выполнен с возможностью обеспечения графического изображения обнаруженных семян S с помощью индикатора 66 семян (см. ФИГ. 6). В показанном варианте реализации элемент 42 графического отображения выполнен с возможностью наложения индикатора 66 семян на индикаторы 58 изображения камеры. Предпочтительно индикаторы 66 семян выполнены с возможностью наложения на соответствующие семена S или рядом с соответствующими семенами S, идентифицированными с помощью индикаторов 58 изображения камеры. Как показано, индикатор 66 семян включает в себя прямоугольник, предпочтительно расположенный вокруг соответствующих семян S.
Контроллер
[0083] В показанном высевающем агрегате 10 контроллер 16 также выполнен с возможностью обработки информации, полученной посредством времяпролетных датчиков 14, для генерации одного или более параметров борозды и/или параметров семян. Например, контроллер 16 предпочтительно выполнен с возможностью идентификации объектов во времяпролетных изображениях, полученных от датчиков. Объекты могут быть идентифицированы на времяпролетных изображениях различными методами, такими как алгоритмы машинного зрения или нейронные сети с глубоким обучением.
[0084] Предпочтительный контроллер 16 также может быть выполнен с возможностью создания карт глубин на основании времяпролетных изображений. Карты глубин могут содержать матрицу значений глубины, соответствующих пикселям времяпролетных изображений. Предпочтительно указанную матрицу можно использовать для идентификации объектов и расстояний между объектами.
[0085] Как описано выше, в предпочтительных вариантах реализации высевающего агрегата 10 контроллер 16 выполнен с возможностью отображения одного или более параметров борозды и/или параметров семян для оператора высевающего агрегата 10. Контроллер 16 также предпочтительно выполнен с возможностью наложения данных времяпролетного изображения на другие изображения, такие как изображения RGB из камеры RGB. Контроллер 16 также выполнен с возможностью выработки предупреждения, когда параметры борозды и/или параметры посевного материала превышают целевые параметры.
[0086] Предпочтительно контроллер 16 также выполнен с возможностью автоматического управления работой одного или более компонентов высевающего агрегата 10 на основании одного или более параметров борозды и/или параметров семян. В предпочтительных вариантах реализации контроллер 16 выполнен с возможностью автоматического управления параметрами работы высевающего агрегата 10, включая скорость высевающего агрегата, время распределения семян высевающим агрегатом и изменение процесса образования борозды высевающим агрегатом. Изменение процесса образования борозды может включать регулировки, связанные с одним или более параметрами борозды, такими как ширина борозды, глубина борозды и качество борозды. Например, процесс образования борозды может быть изменен путем изменения по меньшей мере одного из следующих параметров: прижимной силы сошника, более плотного прижима семян и положения или силы очистителя рядка/уборщика полевых отходов. Кроме того, контроллер может быть выполнен с возможностью управления по меньшей мере одним параметром, связанным с процессом заделки борозды. Например, процесс заделки борозды может быть изменен путем изменения параметра заделочного колеса, такого как прижимная сила (которая может влиять на конечную глубину заделки семян, в зависимости от того, насколько хорошо заделочные колеса возвращают почву поверх семян при заделке борозды).
[0087] С использованием высевающего агрегата 10 согласно настоящему изобретению можно активно отслеживать информацию о процессе посева по мере его продолжения. Диапазон допусков может быть задан таким образом, чтобы система сообщала оператору, если глубина и интервалы посадки превышают спецификации на любом этапе процесса посадки. Оператору также могут быть представлены видеоизображения (например, показывающие заделку семян во время посева).
[0088] Варианты реализации настоящего изобретения могут использоваться для обеспечения обратной связи с оператором на экранах мониторов или других отслеживающих систем. Изобретение предпочтительно обеспечивает обратную связь для автономных систем привода, и такие данные обратной связи могут обеспечивать достоверную проверку параметров посевного материала, борозды и обработки почвы во время посева без необходимости отслеживания или вмешательства оператора.
[0089] Варианты реализации настоящего изобретения также могут использоваться для проверки и обратной связи в системах прижимной силы сажальной машины. Например, высевающий агрегат 10 может быть выполнен с возможностью включения активной системы прижимной силы, которая обычно поддерживает постоянную глубину борозды.
[0090] Опять же контроллер 16 и пользовательский интерфейс 40 могут быть обеспечены как часть вычислительного устройства агрегата 10. Вычислительное устройство может включать в себя любое устройство, компонент или оборудование с обрабатывающим элементом и связанными с ним элементами запоминающего устройства. Обрабатывающий элемент может работать под управлением операционных систем и может быть выполнен с возможностью исполнения компьютерной программы, которая также обычно известна как инструкции, команды, программный код, исполняемые файлы, прикладные программы («приложения») и т.п. Обрабатывающий элемент может включать в себя процессоры, микропроцессоры, микроконтроллеры, программируемые вентильные матрицы и т.п. или их сочетания. Элементы запоминающего устройства могут быть выполнены с возможностью запоминания или хранения компьютерной программы, а также могут хранить данные, обычно двоичные данные, включая текст, базы данных, изображения, аудио, видео, их сочетания и т.п. Элементы запоминающего устройства также могут быть известны как «компьютерочитаемый носитель для хранения данных» и могут включать в себя оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), флэш-память, гибкие диски, жесткие диски, оптические носители данных, такие как компактные диски (CD или CDROM), цифровой видеодиск (DVD), диск Blu-Ray™ и т.п. или их сочетания.
[0091] Вычислительное устройство, в частности, может включать в себя компьютер с электронным блоком управления (ЭБУ), мобильные устройства связи (включая беспроводные устройства), рабочие станции, настольные компьютеры, портативные компьютеры, карманные компьютеры, планшетные компьютеры, портативные цифровые помощники (КПК), смартфоны и тому подобное или их сочетания. Различные варианты реализации вычислительного устройства также могут включать в себя устройства голосовой связи, такие как сотовые телефоны или стационарные телефоны.
[0092] Пользовательский интерфейс 40 вычислительного устройства может обеспечивать возможность для одного или более пользователей обмениваться информацией и командами с одним или более других вычислительных устройств (таких как вычислительное устройство другого агрегата). Пользовательский интерфейс 40 может способствовать взаимодействию посредством описанного выше графического интерфейса пользователя или может дополнительно содержать один или более функциональных устройств ввода, таких как кнопки, клавиатура, переключатели, колеса прокрутки, элементы распознавания голоса, такие как микрофон, указывающие устройства, такие как мыши, сенсорные панели, трекболы, стилусы. Пользовательский интерфейс 40 также может включать в себя динамик для предоставления звуковых инструкций и обратной связи. Кроме того, пользовательский интерфейс 40 может содержать элементы проводной или беспроводной передачи данных, такие как компонент связи, съемное запоминающее устройство, приемопередатчики и/или передатчики данных, обеспечивающие возможность для пользователя и/или других вычислительных устройств взаимодействовать удаленным способом с вычислительным устройством агрегата 10.
[0093] Также в рамках настоящего изобретения вычислительное устройство агрегата 10 может быть связано с другими вычислительными устройствами и/или серверными устройствами посредством сети связи. Например, вычислительное устройство агрегата 10 может взаимодействовать с вычислительным устройством одного или более других агрегатов посредством сети связи. Сеть связи может быть проводной или беспроводной и может включать в себя серверы, маршрутизаторы, коммутаторы, беспроводные приемники и передатчики и т.п., а также электропроводящие кабели или оптические кабели. Сеть связи также может включать в себя локальные, городские или глобальные сети, а также Интернет или другие облачные сети. Кроме того, сеть связи может включать в себя сети сотовой или мобильной связи, а также сети фиксированной связи, коммутируемые телефонные сети общего пользования, оптоволоконные сети и т.п.
[0094] Как серверные устройства, так и вычислительные устройства могут быть подключены к сети 306 связи. Серверные устройства могут связываться с другими серверными устройствами или вычислительными устройствами посредством сети связи. Аналогичным образом, вычислительные устройства могут связываться с другими вычислительными устройствами или серверными устройствами посредством сети связи. Соединение с сетью связи может быть проводным или беспроводным. Таким образом, серверные устройства и вычислительные устройства могут включать в себя соответствующие компоненты для установления проводного или беспроводного соединения.
Почвообрабатывающий агрегат
[0095] На ФИГ. 7-14 показано почвообрабатывающий агрегат 100 согласно настоящему изобретению. Остальное описание будет сосредоточено в первую очередь на отличиях этого варианта реализации почвообрабатывающего агрегата от предпочтительного варианта реализации высевающего агрегата, описанного выше.
[0096] Почвообрабатывающий агрегат 100 сконструирован в соответствии с предпочтительным вариантом реализации настоящего изобретения. Агрегат 100 можно буксировать через поле (которое может включать в себя один или более участков земли G), подлежащее культивированию. Агрегат 100 можно буксировать буксирующим транспортным средством (не показано), например, трактором. В различных вариантах реализации буксирующее транспортное средство может включать в себя управляемое оператором транспортное средство или автономное транспортное средство для буксировки агрегата.
[0097] Почвообрабатывающий агрегат 100 предпочтительно включает в себя основную раму 102, поддерживаемую над поверхностью земли множеством колес 104, гидравлические исполнительные механизмы 106a-106d, выравнивающий узел 108, переднюю и заднюю группы 110, 112 ножей сошников, датчики 113 высоты, датчики 114 полевых отходов, датчики 115 температуры, контроллер 116 и гидравлическую питающую систему 118 (см. ФИГ. 7, 13 и 14).
[0098] Как объяснено ниже, датчики 113, 114, 115 функционально связаны с контроллером 116 (см. ФИГ. 14) и могут использоваться на почвообрабатывающем агрегате 100 для определения горизонтальности и качества обработки поверхности позади агрегата и/или инструментов агрегата, а также определения пропорции растительных полевых отходов, покрывающих почву. Такие датчики могут содержать времяпролетные камеры и/или другие датчики технического зрения (например, камеру RGB). Например, сочетание времяпролетных датчиков и датчиков цвета может использоваться для определения уровня полевых отходов. Кроме того, измерение времяпролетного расстояния может быть объединено с анализом цветовых данных для отделения стоячих полевых отходов от полевых отходов, расположенных на уровне земли.
[0099] Подобно предыдущему варианту реализации, один или более времяпролетных датчиков почвообрабатывающего агрегата 100 могут содержать времяпролетную камеру. Времяпролетная камера предпочтительно может использовать монохроматическое освещение и/или многоволновое освещение. Времяпролетная камера предпочтительно может работать в ультрафиолетовом спектре, инфракрасном спектре и/или в видимом спектре. В предпочтительной камере могут использоваться светодиодные источники света и/или лазерные источники света. Предпочтительная камера может включать в себя фотоэлементы.
[0100] Варианты реализации настоящего изобретения дополнительно или альтернативно могут иметь времяпролетные датчики 14, которые включают датчики LiDAR, радиолокационные датчики, ультразвуковые датчики и/или гидролокационные датчики.
[0101] В различных вариантах реализации в рамках настоящего изобретения датчики 113, 114, 115 могут использоваться для получения информации и обеспечения обратной связи с контроллером 116 для инициирования регулировок одного или более из следующих рабочих параметров агрегата: угла группы дисков; гидравлического давления переноса веса на внутреннюю боковую секцию; гидравлического давления переноса веса на наружную боковую секцию; положения первичного подъемного цилиндра по высоте; положения гидроцилиндра продольного рычажного механизма выравнивания; и давления в гидроцилиндре подъема/спуска (и направления) заднего навесного оборудования. Один или более таких параметров можно настраивать на получение или оптимизацию указанных пользователем уровней полевых отходов, шероховатости (например, однородности комков почвы/размера комков), глубины обработки, уровня влажности почвы после прохода, однородности ровной поверхности.
[0102] Предпочтительные варианты реализации могут позволять оператору ранжировать приоритет целевых параметров, когда несколько целевых параметров конфликтуют или не могут быть достигнуты одновременно. Кроме того, предпочтительный агрегат может обеспечивать возможность для оператора указывать ограниченный диапазон для регулировок целевых параметров при попытке достичь целевых результатов (например, оператор может указать диапазон глубины обработки почвы, который должен оставаться между примерно тремя дюймами (3”) и примерно четырьмя дюймами (4”).
[0103] Используемый здесь для описания навесного оборудования термин «уровень» обычно предназначен для обозначения постоянной высоты основной рамы 102 агрегата относительно земли независимо от формы или уклона ландшафта. Термин «уровень» может соответствовать или не соответствовать горизонтальному состоянию в конкретном месте.
Рама агрегата
[0104] Как показано на ФИГ. 8-10B, основная рама 102 выполнена с возможностью размещения на ней множества инструментов, взаимодействующих с землей, которые описаны более подробно ниже. Одно или более колес 104 могут содержать колеса регулировки глубины, выполненные с возможностью регулировки вверх и вниз относительно основной рамы 102 с помощью гидравлических исполнительных механизмов 106a для управления таким способом: (i) глубиной проникновения в почву взаимодействующих с землей инструментов, когда агрегат 100 опускают до рабочей конфигурации; и/или (ii) высотой взаимодействующих с землей инструментов над землей, когда агрегат 100 поднимают до транспортной конфигурации.
[0105] Агрегат 100 может включать в себя множество колес 104, в целом, расположенных в проходящем в боковом направлении ряду. Количество колес 104 может изменяться в зависимости от размера агрегата 100 и/или требований к обработке почвы. Однако, как показано на чертежах, агрегат 100 может иметь восемь колес 104, включая четыре внутренних колеса 104 и четыре наружных колеса 104. Как отмечено ранее, колеса 104 выполнены с возможностью поддержки основной рамы 102 над землей G. Колеса 104 также предпочтительно содержат колеса регулировки глубины, которые приводятся в действие гидравлическими исполнительными механизмами 106a для переключения агрегата 100 между рабочей конфигурацией (например, на ФИГ. 9A и 9B), в которой по меньшей мере некоторые инструменты взаимодействуют с землей, и транспортной конфигурацией (не показана), в которой инструменты в значительной степени оторваны от земли. Таким образом, основная рама 102 в рабочей конфигурации обычно расположена ближе к земле, чем в транспортной конфигурации.
[0106] Гидравлические исполнительные механизмы 106a предпочтительно содержат гидроцилиндры. Однако в объем настоящего изобретения также включено устройство линейного исполнительного механизма или поворотного исполнительного механизма, альтернативного исполнительным механизмам 106a.
[0107] В показанном варианте реализации основная рама 102 предпочтительно включает в себя центральную секцию 120, внутреннюю левую боковую секцию 122a, наружную левую боковую секцию 122b, внутреннюю правую боковую секцию 124a и наружную правую боковую секцию 124b, как показано на ФИГ. 12 и 13. Внутренние левая и правая боковые секции 122a, 124a выполнены с возможностью поворота вверх/вниз относительно центральной секции 120. Наружные левая и правая боковые секции 122b, 124b выполнены с возможностью поворота вверх/вниз относительно внутренних левой и правой боковых секций 122a, 124a.
[0108] В рабочей конфигурации боковые секции 122a, 122b, 124a, 124b обычно ориентированы параллельно центральной секции 120 (т.е. ориентированы в основном горизонтально), как показано на ФИГ. 8. Однако следует понимать, что боковые секции могут отклоняться от параллельной ориентации относительно центральной секции, оставаясь при этом в рабочей конфигурации (например, чтобы оставаться параллельными поверхности почвы при столкновении с неровным рельефом, таким как терраса на поле на склоне холма).
[0109] В транспортной конфигурации боковые секции 122a, 122b, 124a, 124b могут быть повернуты вверх из положения, параллельного центральной секции 120. Например, боковые секции могут быть расположены над центральной секцией и проходить вверх с наклоном или перпендикулярно относительно центральной секции 120.
[0110] Варианты реализации настоящего изобретения могут использоваться на рамах, отличающихся от пятисекционной рамы, описанной выше. Например, варианты осуществления настоящего изобретения могут использоваться с трехсекционной рамой, которая может включать в себя центральную секцию, левую боковую секцию и правую боковую секцию.
Высота и приведение в действие агрегата
[0111] Датчики 113 высоты предпочтительно содержат времяпролетный датчик, который может включать в себя времяпролетную камеру. Датчики 113a, 113b высоты предпочтительно прикреплены к центральной секции 120 вдоль соответствующих переднего и заднего концов 120a, 120b. Датчики 113c, 113d высоты предпочтительно прикреплены к соответствующим внутренней и наружной боковым секциям 122a, 122b, 124a, 124b. Наиболее предпочтительно каждая боковая секция 122a, 122b, 124a, 124b имеет соответствующий датчик 113c, 113d высоты, прикрепленный рядом с наружным концом боковых секций и вдоль переднего конца 120a. Как объяснено ниже, датчики 113 высоты выполнены с возможностью способствования выравниванию почвообрабатывающего агрегата 100.
[0112] Для измерения высоты времяпролетные камеры (например, датчики расстояния) выполнены с возможностью выдачи сигналов (например, световых волн), которые проходят к поверхности земли под датчиками, отражаются от поверхности и возвращаются к камере. В показанном варианте реализации центральная секция 120 включает в себя по меньшей мере один датчик 113a вдоль переднего конца 120a и по меньшей мере один датчик 113b вдоль заднего конца 120b. Понятно, что волны определенной длины могут лучше проникать сквозь пыль в воздухе и материалы растительных полевых отходов, при этом отчетливо отражаясь от почвы. Однако по меньшей мере в некоторых альтернативных вариантах реализации вместо световых волн можно использовать звуковые волны.
[0113] При использовании множество поверхностей, связанных с землей G, будут отражать сигнал из-за неровного рельефа, полевых отходов и/или других объектов на земле G. Варианты реализации настоящего изобретения могут использовать алгоритм определения значений средней высоты от земли до датчиков из диапазона отраженных сигналов. Такие вычисления предпочтительно выполнять для каждого из датчиков (например, переднего датчика и заднего датчика).
[0114] Исполнительные механизмы 106 предпочтительно включают в себя внутренние гидравлические исполнительные механизмы 106b, которые функционально соединены с внутренними левой и правой боковыми секциями 122a, 124a и центральной секцией 120 (см. ФИГ. 7 и 8). Исполнительные механизмы 106b выполнены с возможностью поворота внутренних левой и правой боковых секций 122a, 124a вверх/вниз относительно центральной секции 120. Точно так же, наружные гидравлические исполнительные механизмы 106c функционально соединены с наружными левой и правой боковыми секциями 122b, 124b и внутренними левой и правой боковыми секциями 122a, 122b (см. ФИГ. 7 и 8). Исполнительные механизмы 106c выполнены с возможностью поворота наружных левой и правой боковых секций 122b, 124b вверх/вниз относительно внутренних левой и правой боковых секций 122a, 122b.
[0115] Во время работы исполнительные механизмы 106b, 106c выполнены с возможностью приложения силы, направленной наружу и/или вниз, к соответствующим боковым секциям 122a, 122b, 124a, 124b. Например, в рабочей конфигурации исполнительные механизмы 106b, 106c предпочтительно выполнены с возможностью переноса по меньшей мере части веса центральной секции 120 на боковые секции 122a, 122b, 124a, 124b или от них. В предпочтительных вариантах реализации перенос веса между центральной секцией 120 и боковыми секциями 122a, 122b, 124a, 124b может быть выполнен с возможностью гарантирования того, что взаимодействующие с землей инструменты (такие как ножи 110, 112 сошника) почвообрабатывающего агрегата 100, работают на одинаковой глубине в земле.
[0116] Гидравлические исполнительные механизмы 106b, 106c предпочтительно содержат гидроцилиндры. Однако в объем настоящего изобретения также включены устройства линейного исполнительного механизма или поворотного исполнительного, альтернативные исполнительным механизмам 106b, 106с.
[0117] Гидравлические исполнительные механизмы 106a-106d предпочтительно функционально соединены с гидравлической питающей системой 118, которая может управляться контроллером 116, и приводятся в действие указанной системой. Обычно гидравлическая питающая система 118 включает в себя помимо прочего гидравлический насос (не показан) для выборочной подачи гидравлической жидкости под давлением к исполнительным механизмам 106a-106d и от них.
[0118] В вариантах реализации, в которых исполнительными механизмами являются гидроцилиндры, переносом веса между секциями рамы можно управлять путем регулировки гидравлического давления, прикладываемого к цилиндрам, обычно с помощью регулируемого вручную редукционного клапана гидравлического давления. По меньшей мере в некоторых вариантах реализации к цилиндрам может быть приложено заданное давление. Например, к исполнительным механизмам 106b может быть приложено гидравлическое давление 400 фунт/кв. дюйм (для приложения соответствующей силы к внутренним боковым секциям 122a, 124a), а давление примерно в два раза меньшее (например, примерно 200 фунт/кв. дюйм) к исполнительным механизмам 106c (для приложения соответствующей силы к наружным боковым секциям 122b, 124b).
[0119] Центральная секция 120 и боковые секции 122a, 122b, 124a, 124b предпочтительно включают в себя соответствующие датчики 113a, 113b, 113c, 113d высоты, выполненные с возможностью получения информации о высоте, указывающей высоту секции над землей (см. ФИГ. 9A-10B). Контроллер 116 выполнен с возможностью использования данных от датчиков 113 высоты для сравнения высоты внутренней и наружной боковых секций 122a, 122b, 124a, 124b с высотой центральной секции 120.
[0120] Контроллер 116 выполнен с возможностью уменьшения давления для внутренних гидравлических исполнительных механизмов 106b, когда высота внутренних боковых секций 122a, 124a определяется как меньшая, чем высота центральной секции 120. Подобным образом, контроллер 116 выполнен с возможностью увеличения давления для внутренних гидравлических исполнительных механизмов 106b, когда высота внутренних боковых секций 122a, 124a определена как большая, чем высота центральной секции 120.
[0121] Кроме того, контроллер 116 выполнен с возможностью уменьшения давления на наружные гидравлические исполнительные механизмы 106c, когда высота наружных боковых секций 122b, 124b определяется как меньшая, чем высота центральной секции 120. По меньшей мере в некоторых вариантах реализации контроллер 116 может быть выполнен с возможностью уменьшения переноса веса от внутренних боковых секций 122a, 124a на наружные боковые секции 122b, 124b, когда высота наружных боковых секций 122b, 124b определяется как меньшая, чем высота центральной секции 120.
[0122] Подобным образом, контроллер 116 выполнен с возможностью увеличения давления на наружные гидравлические исполнительные механизмы 106c, когда высота наружных боковых секций 122b, 124b определяется как большая, чем высота центральной секции 120. По меньшей мере в некоторых вариантах реализации контроллер 116 может увеличивать перенос веса от внутренних боковых секций 122a, 124a на наружные боковые секции 122b, 124b, когда высота наружных секций 122b, 124b определяется как больше, чем высота центральной секции 120. Таким образом, контроллер выполнен с возможностью выравнивания секций рамы почвообрабатывающего агрегата от стороны к стороне.
Выравнивание агрегата
[0123] Узел 108 выравнивания предпочтительно выполнен с возможностью регулировки ориентации центральной секции 120 спереди назад. Узел 108 выравнивания включает в себя продольный выдвижной рычажный механизм 130 со звеньями 132 и гидравлическим исполнительным механизмом 106d. Исполнительный механизм 106d выполнен с возможностью приведения в действие рычажного механизма 130 для смещения центральной секции 120, так что высота переднего конца 120a центральной секции 120 увеличивается относительно высоты заднего конца 120b центральной секции 120. Исполнительный механизм 106d также выполнен с возможностью приведения в действие рычажного механизма 130 для смещения центральной секции 120, так что высота переднего конца 120a центральной секции 120 уменьшается относительно высоты заднего конца 120b центральной секции 120.
[0124] Гидравлический исполнительный механизм 106d предпочтительно содержит гидроцилиндр и функционально соединен с гидравлической питающей системой 118. Однако в объем настоящего изобретения также включено устройство линейного исполнительного механизма или поворотного исполнительного механизма, альтернативного исполнительному механизму 106d.
[0125] Контроллер 116 выполнен с возможностью приема информации о высоте от переднего датчика 113a высоты и информации о высоте от заднего датчика 113b высоты (см. ФИГ. 9A-10B). Контроллер 116 также выполнен с возможностью обеспечения инструкций для узла 108 выравнивания для регулировки продольной ориентации центральной секции 120 на основании полученной информации о высоте.
[0126] В частности, контроллер 116 выполнен с возможностью сравнения значения высоты спереди от переднего датчика 113a и значения высоты сзади от заднего датчика 113b для определения фактического (т.е. измеренного) значения уровня центральной секции 120. Предпочтительно указанное значение уровня содержит разницу между значениями высоты спереди и сзади. Однако значение уровня в продольном направлении может быть охарактеризовано альтернативным способом (например, как угловое значение).
[0127] Контроллер 116 также предпочтительно выполнен с возможностью приема желаемого значения целевого уровня и/или диапазона значений целевого уровня. Кроме того, контроллер 116 выполнен с возможностью сравнения фактического значения уровня с целевым значением уровня или диапазоном значений целевого уровня.
[0128] Агрегат 100 предпочтительно выполнен таким образом, что целевое значение или диапазон целевых значений уровня в целом соответствует основной раме 102, которая целом параллельна поверхности земли G в продольном направлении. Тем не менее в рамках настоящего изобретения также предусмотрено, что значение или диапазон значений целевого уровня были связаны с основной рамой 102 в непараллельном отношении с землей G. Например, агрегатом 100 можно управлять так, что задний конец 120b установлен глубже, чем передний конец 120a. И наоборот, агрегатом 100 можно управлять так, что передний конец 120a установлен глубже, чем задний конец 120b. Следует понимать, что непараллельное целевое значение уровня может быть предпочтительным для оптимизации результата завершенной операции обработки почвы. Непараллельное целевое значение уровня может быть определено на основании различных факторов, таких как твердость почвы, относительное влияние групп передних сошников по сравнению с группами задних сошников и т.п.
[0129] При использовании рабочий этап (именуемый в настоящем документе «этапом 1») агрегата 100 включает в себя регулировку узла 108 выравнивания для выравнивания рамы агрегата в продольном направлении. Значения высоты от переднего и заднего датчиков 113a, 113b предпочтительно сравнивают друг с другом для определения разности. Когда разность находится за пределами диапазона целевого уровня, контроллер 116 предпочтительно посылает сигнал для выдвижения или втягивания гидравлического исполнительного механизма 106d.
[0130] Например, если передний конец расположен слишком низко по отношению к заднему концу, контроллер 116 подает сигнал для выдвижения гидравлического исполнительного механизма 106d, чтобы поднимать передний конец и/или опускать задний конец центральной секции 120 до тех пор, пока два значения высоты (измеренные передним датчиком и задним датчиком) не будут находятся в пределах целевого диапазона относительно друг друга.
[0131] Альтернативно, когда передний конец находится слишком высоко относительно заднего конца, контроллер 116 подает сигнал для втягивания гидравлического исполнительного механизма 106d, чтобы опускать передний конец и/или поднимать задний конец центральной секции 120 до тех пор, пока два значения высоты (измеренные передним датчиком и задним датчиком) не будут находиться в пределах целевого диапазона относительно друг друга.
[0132] Контроллер 116 также предпочтительно выполнен с возможностью выравнивания секций рамы почвообрабатывающего агрегата 100 в боковом направлении. В частности, контроллер 116 выполнен с возможностью сравнения значения высоты передней части, полученного от переднего датчика 113a, центральной секции 120 и значений высоты, полученных от датчиков 113c, 113d боковых секций 122a, 122b, 124a, 124b, для определения фактического (т.е. измеренного) значения бокового уровня основной рамы 102. Предпочтительно значение уровня содержит разность между значениями высоты секции. Однако значение уровня в боковом направлении может быть охарактеризовано альтернативным способом (например, как угловое значение).
[0133] Контроллер 116 также предпочтительно выполнен с возможностью приема проектного целевого значения бокового уровня и/или диапазона значений целевого уровня. Кроме того, контроллер 116 выполнен с возможностью сравнивания фактического значения бокового уровня с целевым значением бокового уровня или диапазоном целевых значений бокового уровня.
[0134] Управление агрегатом 100 включает в себя этап (называемый в данном документе «Этапом 2») регулировки внутреннего гидравлического давления передачи веса, подаваемого к внутренним гидравлическим исполнительным механизмам 106b, для выравнивания внутренних боковых секций 122a, 124a относительно центральной секции 120.
[0135] Внутренние гидравлические исполнительные механизмы 106b могут использоваться в полевых условиях для приложения силы, действующей наружу и/или вниз, к внутренним боковым секциям 122a, 124a для переноса части веса центральной секции на внутренние боковые секции и/или наружные боковые секции. В вариантах реализации, в которых исполнительные механизмы 106b представляют собой гидравлические цилиндры, величина силы, передаваемой между секциями рамы, может быть определена путем управления гидравлическим давлением, прикладываемым к цилиндрам, обычно с помощью регулируемого вручную редукционного клапана гидравлического давления.
[0136] В вариантах реализации настоящего изобретения процесс управления начинается с подачи общего стандартного давления, прикладываемого к системе переноса веса, обычно 400 фунт/кв. дюйм, для внутренних боковых секций и половины этого давления (например, 200 фунт/кв. дюйм) для наружных боковых секций. Целью такого переноса веса является перенос нагрузки с центральной секции и/или внутренних боковых секций, которые тяжелее, на наружные боковые секции, которые легче, чтобы все секции рамы выполняли одинаковую работу и работали на одинаковой глубине.
[0137] Значения высоты от датчиков 113a, 113b, 113c предпочтительно сравнивают друг с другом для определения разностей уровней между внутренними боковыми секциями 122a, 124a и центральной секцией 120. Когда разность уровней в боковом направлении выходит за пределы целевого диапазона значений уровней, контроллер 116 предпочтительно посылает сигнал для выдвижения или втягивания соответствующего внутреннего гидравлического исполнительного механизма 106b.
[0138] Например, если внутренняя боковая секция 122a, 124a расположена слишком низко относительно центральной секции 120, контроллер 116 подает сигнал на втягивание внутреннего гидравлического исполнительного механизма 106b, чтобы поднимать внутреннюю боковую секцию 122a, 124a до тех пор, пока значения высоты, измеренные с помощью соответствующих датчиков 113a, 113b, 113c, не будут находиться в пределах целевого диапазона значения относительно друг друга. Иными словами, контроллер 116 выполнен с возможностью уменьшения давления на внутренние гидравлические исполнительные механизмы 106b, когда высота внутренних боковых секций 122a, 124a определяется как меньшая, чем высота центральной секции 120. По меньшей мере в некоторых аспектах настоящего изобретения можно уменьшать внешнее давление гидравлического исполнительного механизма до нуля, а вместо этого прикладывать внутреннее давление для подъема боковой секции, если это необходимо. Например, такое использование может быть подходящим, когда центральная секция 120 расположена на относительно твердой почве (например, относительно сухой почве), а боковая секция расположена на относительно мягкой почве (например, относительно песчаной или влажной почве).
[0139] И наоборот, когда внутренняя боковая секция 122a, 124a слишком высока относительно центральной секции 120, контроллер 116 подает сигнал на выдвижение исполнительного механизма 106b внутренней боковой секции для опускания внутренней боковой секции 122a, 124a до тех пор, пока значения высоты, измеряемые соответствующими датчиками 113a, 113b, 113c, не будут находиться в пределах целевого диапазона значений относительно друг друга. Иными словами, контроллер 116 выполнен с возможностью увеличения давления на внутренние гидравлические исполнительные механизмы 106b, когда высота внутренних боковых секций 122a, 124a определяется как большая, чем высота центральной секции 120.
[0140] Для вариантов реализации настоящего изобретения среднее значение результатов измерения высоты центральной секции 120 (например, полученное от переднего датчика 113a и заднего датчика 113b, связанных с центральной секцией 120) может использоваться в качестве целевого значения для внутренних боковых секций 122a, 124a. На наружном конце каждой внутренней боковой секции может быть установлен один из датчиков на одном и том же расстоянии. Среднее значение этих двух расстояний до боковых датчиков может быть вычислено и сравнено с расстоянием по высоте центральной секции с помощью контроллера. Если такие расстояния находятся в пределах целевого диапазона, корректировки не нужны. Если боковые датчики 113c указывают, что внутренние боковые секции 122a, 124a расположены слишком низко по сравнению с центральной секцией 120, давление в гидравлических приводах 106b может быть уменьшено для устранения силы передачи веса. Если высота боковой секции слишком велика, давление может быть увеличено, чтобы добавить силу переноса веса. В предпочтительном варианте реализации регулировка (подъем или опускание) колес, поддерживающих боковые секции во время этого процесса, может отсутствовать, но можно регулировать только силу переноса веса.
[0141] Управление агрегатом 100 включает в себя этап (называемый в данном документе «Этап 3») регулировки внешнего гидравлического давления передачи веса, подаваемого в наружные гидравлические исполнительные механизмы 106c, для выравнивания наружных боковых секций 122b, 124b относительно центральной секции 120. Тот же процесс, который использовался для выравнивания внутренних боковых секций 122a, 124a относительно центральной секции 120 на этапе 2, описанном выше, может быть использован для выравнивания наружных боковых секций 122b, 124b, чтобы они соответствовали ориентации внутренних боковых секций 122a, 124a.
[0142] Наружные гидравлические исполнительные механизмы 106c могут использоваться на поле для приложения силы, направленной наружу и/или вниз, действующей на наружные боковые секции 122b, 124b для передачи части веса центральной секции и/или внутренних боковых секций на внутренние боковые секции и/или наружные боковые секции. В вариантах реализации, в которых исполнительные механизмы 106c представляют собой гидравлические цилиндры, величина силы, передаваемой между секциями рамы, может быть определена путем управления гидравлическим давлением, прикладываемым к цилиндрам, обычно с помощью устанавливаемого вручную редукционного клапана гидравлического давления.
[0143] Значения высоты от датчиков 113a, 113d предпочтительно сравнивают друг с другом для определения разностей уровней между наружными боковыми секциями 122b, 124b и центральной секцией 120. Когда разность уровней в боковом направлении выходит за пределы целевого диапазона значений уровней, контроллер 116 предпочтительно посылает сигнал для выдвижения или втягивания соответствующего наружного гидравлического исполнительного механизма 106c.
[0144] Например, если наружная боковая секция 122b, 124b расположена слишком низко относительно центральной секции 120, контроллер 116 подает сигнал на втягивание наружного гидравлического исполнительного механизма 106c, чтобы поднимать наружную боковую секцию 122b, 124b до тех пор, пока значения высоты, измеренные с помощью соответствующих датчиков 113a, 113d, не будут находиться в пределах целевого диапазона значений относительно друг друга. Иными словами, контроллер 116 выполнен с возможностью уменьшения давления на наружные гидравлические исполнительные механизмы 106c, когда высота наружных боковых секций 122b, 124b определяется как меньшая, чем высота центральной секции 120. По меньшей мере в некоторых вариантах реализации контроллер 116 может быть выполнен с возможностью уменьшения переноса веса от внутренних боковых секций 122a, 124a на наружные боковые секции 122b, 124b, когда высота наружных боковых секций 122b, 124b определяется как меньшая, чем высота центральной секции 120.
[0145] И наоборот, когда наружная боковая секция 122b, 124b находится слишком высоко относительно центральной секции 120, контроллер 116 подает сигнал на выдвижение наружного гидравлического исполнительного механизма 106c для опускания наружной боковой секции 122b, 124b до тех пор, пока значения высоты, измеренные с помощью соответствующих датчиков 113a, 113d, не будут находиться в пределах целевого диапазона значений относительно друг друга. Иными словами, контроллер 116 выполнен с возможностью увеличения давления на наружные гидравлические исполнительные механизмы 106c, когда высота наружных боковых секций 122b, 124b определяется как большая, чем высота центральной секции 120. По меньшей мере в некоторых вариантах реализации контроллер 116 может увеличивать перенос веса от внутренних боковых секций 122a, 124a на наружные боковые секции 122b, 124b, когда высота наружных секций 122b, 124b определяется как большая, чем высота центральной секции 120.
Взаимодействующие с землей инструменты
[0146] Что касается инструментов для работы с почвой, агрегат 100 может включать в себя, как показано на ФИГ. 7, 10A и 10B, переднюю и заднюю группы 110, 112 ножей 30 сошников. Передняя группа 110 ножей сошников поддерживается основной рамой 102 и проходит вниз от нее. Передняя группа 110 ножей сошников может проходить в целом в боковом направлении через основную раму 102 агрегата 100. В некоторых вариантах реализации передняя группа 110 ножей сошников может быть выполнена в виде множества отдельных групп 110a ножей сошников. Например, агрегат 100 может включать в себя переднюю группу 110 ножей сошников, которая содержит шесть отдельных групп 110a ножей сошников, как, возможно, лучше всего показано на ФИГ. 10A. Каждая группа 110a может содержать восемь отдельных ножей сошников. Используемый здесь термин «группа» относится к группе взаимодействующих с землей инструментов, которые связаны друг с другом таким образом, что приводятся в действие как единое целое.
[0147] Кроме того, агрегат 100 может включать в себя заднюю группу 112 ножей сошников, которые удерживаются на основной раме 102 и проходит вниз от нее. Задняя группа 112 ножей сошников может проходить в целом в боковом направлении через основную раму 102 агрегата 100. Задняя группа 112 ножей сошников может быть выполнена в виде множества наборов 112a ножей сошников. Например, агрегат 100 может включать в себя заднюю группу 112 ножей сошников, которая содержит шесть отдельных групп 112a ножей сошников. Каждая группа может содержать восемь отдельных ножей сошников.
[0148] Ножи сошников могут быть выполнены в виде дисковых ножей 140 (см. ФИГ. 9A и 9B), которые могут иметь любую из различных форм. Например, ножи 140 сошников могут включать в себя вогнутые диски. В некоторых вариантах реализации каждая из дисковых ножей может содержать множество волнообразных или рифленых участков на периферийных частях дисковых ножей.
[0149] Опять же передняя и задняя группы 110, 112 ножей сошников включают в себя по шесть групп. Альтернативные варианты реализации агрегата могут включать в себя любое количество групп, каждая из которых включает в себя любое количество ножей сошников. Например, в некоторых вариантах реализации агрегат может включать в себя от шести до четырнадцати ножей сошников в каждой группе. Каждая группа ножей сошников может содержать опорную раму, которая соединена с основной рамой 12 и проходит вниз от нее и которая с возможностью вращения поддерживает связанные с ней ножи сошников, так что каждый из ножей сошников может вращаться вокруг отдельной оси вращения. Как, возможно, лучше всего показано на ФИГ. 5 и 6, каждая из групп ножей сошников может поворачиваться на угол группы вокруг вертикальной, направленной вверх оси 32 поворота. Ось 32 поворота каждой группы ножей сошников может представлять собой точку соединения между группой и основной рамой 12.
[0150] Группы 110a, 112a ножей сошников могут иметь свои групповые углы, регулируемые с помощью исполнительного механизма 142, такого как гидравлический цилиндр, который проходит между основной рамой 102 и группами 110a, 112a (см. ФИГ. 10A и 10B). При работе группы 110a, 112a ножей сошников могут быть ориентированы в основном в боковом положении (например, ФИГ. 10A), так что указанные группы обычно проходят в боковом направлении через основную раму 102 агрегата 100 (т.е. угол группы, образованный между каждой группой и боковым направлением, равен нулю). В такой ориентации ножи сошников каждой группы обращены прямо вперед, как правило, параллельно направлению движения агрегата 100.
[0151] В отличие от этого, группы 110a, 112a ножей сошников могут быть смещены или повернуты в наклонное положение (например, ФИГ. 10B), в котором группы 110a, 112a ориентированы под углом по отношению к боковому направлению агрегата 100 (т.е. угол группы, образованный между каждой группой и боковым направлением, больше нуля). В такой ориентации ножи сошников каждой группы 110a, 112a расположены под непрямым углом по отношению к направлению перемещения агрегата 100. Термин «угол группы» обычно относится к углу, образованному между группой и боковым направлением относительно агрегата 100. Однако угол группы может приблизительно соответствовать углу, образованному между отдельными ножами сошников группы и направлением перемещения агрегата 100 (т.е. продольным направлением).
[0152] Ввиду вышеизложенного каждая из передней и задней групп 20, 22 ножей сошников может быть смещена и/или повернута (например, с помощью исполнительных механизмов 142) в любую ориентацию между минимальным углом группы и максимальным углом группы.
[0153] Более подробная информация о регулировке угла группы раскрыта в заявке США № 15/843,456, озаглавленной «ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ», которая полностью включена в настоящий документ посредством ссылки.
[0154] Агрегат 100 дополнительно может содержать инструменты, взаимодействующие с землей, в виде групп 144 узлов борон и групп 146 финишных роликов, которые поддерживаются основной рамой 12 и проходят вниз от нее (см. ФИГ. 9A-10B). Группы узлов 26 борон могут проходить, в основном, в боковом направлении через агрегат 100. Подобным образом, группы 146 финишных роликов могут проходить в целом в боковом направлении через основную раму 102 агрегата 100.
[0155] Как показано, финишные ролики могут поддерживаться вспомогательной рамой 148 (см. ФИГ. 7 и 9B), которая проходит в заднем направлении от основной рамы 102. В некоторых вариантах реализации вспомогательная рама 148 может составлять часть основной рамы 102. Более подробная информация о предпочтительных узлах бороны и финишных роликах раскрыта во включенной выше заявке '456.
[0156] Управление агрегатом 100 включает этап (называемый в данном документе «Этапом 4») регулировки общей высоты рамы почвообрабатывающего агрегата относительно земли G для достижения целевой глубины инструментов, взаимодействующих с землей. Как описано выше относительно этапов 1-3, варианты реализации выполнены так, что вся рама 102 почвообрабатывающего агрегата работает на одинаковой высоте в продольном и боковом направлениях. Таким образом, варианты реализации могут дополнительно обеспечивать точную настройку/регулировку высоты почвообрабатывающего агрегата для точного управления глубиной, на которой взаимодействующие с землей инструменты взаимодействуют с почвой.
[0157] Всем почвообрабатывающим агрегатом 100 управляет общий гидравлический контур подъема/спуска, который регулирует общую высоту рамы. В частности, среднюю высоту рамы всех датчиков 113, расположенных на почвообрабатывающем агрегате 100 (например, переднего и заднего датчиков 113a, 113b на центральной секции 120, а также датчиков 113c, 113d на каждой из боковых секций 122a, 122b, 124a, 124b) после выравнивания (например, этапов 1-3 процесса, описанных выше) можно сравнивать с целевой высотой рамы. Если полученные значений измерений находятся в пределах диапазона значений целевой высоты рамы, регулировку не выполняют. Если рама 102 расположена слишком высоко, общий контур подъема/спуска регулируется контроллером 116 и гидравлическими клапанами для уменьшения высоты рамы с помощью множества гидравлических исполнительных механизмов 106a в контуре. Если высота слишком мала, контроллер 116 и клапаны работают для увеличения высоты рамы с помощью множества гидравлических исполнительных механизмов 106a в контуре. Такие гидравлические исполнительные механизмы 106a могут включать в себя исполнительные механизмы, связанные с регулируемыми по глубине колесами 104 (например, копирующими колесами), выполненные с возможностью подъема и опускания колес 104 относительно рамы 102 почвообрабатывающего агрегата для подъема и спуска рамы 102 относительно земли.
Измерение полевых отходов на земле и температуры почвы
[0158] Опять же датчики 113, 114, 115 могут использоваться для определения ровности и качества обработки почвы после агрегата и/или инструментов, а также определения доли оставшихся полевых отходов, покрывающих почву. Такие датчики могут содержать времяпролетные камеры или другие датчики изображения. Датчики 113, 114, 115 соединены с контроллером 116 (см. ФИГ. 14) и могут использоваться для получения информации и предоставления обратной связи контроллеру 116 для инициирования регулировок одного или более из следующих рабочих параметров агрегата: угла группы дисков; гидравлического давления переноса веса на внутреннюю боковую секцию; гидравлическое давление переноса веса на наружную боковую секцию; положения первичного подъемного цилиндра по высоте; положения гидроцилиндра рычажного механизма продольного выравнивания; и давления в гидроцилиндре подъема/спуска заднего навесного оборудования (и направления).
[0159] Как показано на ФИГ. 9B-10B и 12, датчики 114 полевых отходов обычно выполнены и расположены как датчики полевых отходов, находящихся на земле. В предпочтительных вариантах реализации настоящего изобретения один или более датчиков 114 полевых отходов могут содержать времяпролетную камеру. Времяпролетная камера может использовать монохроматическое освещение и/или многоволновое освещение. Времяпролетная камера может работать в ультрафиолетовом спектре, инфракрасном спектре и/или в видимом спектре. В предпочтительной камере могут использоваться светодиодные источники света и/или лазерные источники света. Предпочтительная камера также может включать в себя фотоэлементы.
[0160] Варианты реализации настоящего изобретения дополнительно или альтернативно могут иметь времяпролетные датчики 114, которые включают в себя датчики LiDAR, радиолокационные датчики, ультразвуковые датчики и/или гидролокационные датчики.
[0161] Датчики 114 предпочтительно выполнены с возможностью определения фактического покрытия почвы полевыми остатками растительного материала. В показанном варианте реализации датчики 114 обычно расположены вдоль заднего конца 120b и предпочтительно содержат один или более датчиков, обращенных назад, для захвата изображений земли при выполнении операций обработки почвы. Хотя датчики 114 изображены расположенными впереди финишных роликов, в предпочтительных вариантах реализации изобретения датчики могут быть расположены непосредственно над финишными роликами или позади них, так что датчики 114 могут отображать часть поля, на которой агрегат завершил свой проход. Кроме того, в рамках настоящего изобретения датчики 114 могут быть расположены в других положениях относительно основной рамы 102.
[0162] Датчики (например, камеры) выполнены с возможностью получения визуальных изображений, показывающих различные цвета растительных полевых отходов и/или почвы. В некоторых вариантах реализации датчики могут быть в виде времяпролетных камер, выполненных с возможностью определения расстояния до земли.
[0163] Пиксели из времяпролетных изображений могут анализироваться (например, просматриваться на основании цвета) контроллером 116. Пиксели, показывающие диапазон расстояний и цвет, соответствующий почве, могут быть идентифицированы как почва. Пиксели, показывающие другой диапазон цветов или диапазон расстояний, не соответствующий почве, могут быть идентифицированы как полевые отходы.
[0164] Как указано выше, параметры состояния почвы могут быть определены из изображений камеры с использованием: (i) созданных человеком традиционных алгоритмов машинного зрения; и (ii) методов нейронной сети с глубоким обучением и компьютерных оптимизированных алгоритмов для обнаружения объектов.
[0165] Отношение пикселей полевых отходов к пикселям почвы может использоваться (например, анализироваться контроллером 116) для определения процента покрытия полевыми отходами участков поля (т.е. процента покрытия почвы). Затем, контроллер 116 может быть выполнен с возможностью регулировки угла группы и настроек глубины инструментов, взаимодействующих с землей (таких как группы ножей сошников), в попытках достижения целевой пропорции покрытия почвы полевыми отходами (в пределах возможностей машины и существующих уровней полевых отходов).
[0166] Захват изображения, обработка изображения и управление/регулировка инструмента могут выполняться контроллером 116 несколько раз в минуту для способствования обработке/измерению среднего значения и управления для повышения точности. Такая работа может обеспечивать возможность регулировки почвообрабатывающего агрегата 100 в ответ на изменение состояния почвы и полевых отходов на различных участках поля.
[0167] Как показано на ФИГ. 9B-10B и 12, в отношении анализа качества работы, варианты реализации настоящего изобретения также могут включать в себя датчики 115a, 115b температуры для измерения температуры земли G (например, путем получения температурного изображения почвы).
[0168] Датчики 115a температуры выполнены с возможностью измерения температуры земли (например, путем получения температурного изображения почвы) вдоль переднего конца 120a агрегата 100. Один или более датчиков 115a могут включать в себя тепловизионную камеру (например, инфракрасную (ИК) камеру), расположенную вдоль передней части агрегата 100 и предпочтительно обращенную вперед. Датчики 115a предпочтительно ориентированы вперед и выполнены с возможностью сбора температурного изображения земли G перед тем, как почвообрабатывающий агрегат 100 проедет по ней.
[0169] Датчики 115b температуры могут быть расположены вдоль заднего конца 120b агрегата 100. Один или более датчиков 115b могут включать в себя тепловизионную камеру (например, инфракрасную (ИК) камеру), расположенную вдоль задней части агрегата 100 и предпочтительно обращенную назад.
[0170] Поскольку полевые отходы обычно действуют как изолятор, температура почвы с покрытием из полевых отходов обычно ниже, чем температура почвы без покрытия. Эту разность температур можно использовать для оценки уровня полевых отходов на поверхности. Специалистам в данной области техники понятно, что температура почвы изменяется с глубиной, так что почва холоднее (весной) или теплее (осенью) на 2 дюйма глубже по сравнению с поверхностью. Такая вариативность температур позволяет оценить, насколько хорошо обработана и перемешана почва.
[0171] После этапа обработки почвы желательно наблюдать однородное смешанное температурное изображение с множеством мелких хорошо перемешанных точек с разными температурами. Если данные от датчиков 115b иллюстрируют кластеры одинаковых температур, сгруппированные вместе в большие капли или группы, можно сделать вывод, что при обработке почвы остаются комья или куски почвы, которые не развалились. Контроллер 116 предпочтительно выполнен с возможностью анализа тепловых изображений от датчиков 115b для идентификации таких скоплений или для определения качества обработки почвы после того, как почвообрабатывающий агрегат прошел над ней.
[0172] Варианты реализации настоящего изобретения могут использовать датчики 115b для определения глубины обработки почвы после того, как почвообрабатывающий агрегат 100 прошел над ней. В частности, датчики 115b могут использоваться для оценки глубины обработки агрегата путем измерения температуры почвы и использования данных о температуре почвы в качестве калибровочного коэффициента. Чем выше градиент температуры на изображении, тем глубже обрабатывает агрегат. Если доступны эталонные температуры для определенной глубины, варианты реализации могут калиброваться по этой эталонной температуре и использовать ее в качестве истинного измерения глубины по сравнению с полученным изображением вспаханной почвы. Контроллер 116 предпочтительно выполнен с возможностью анализа тепловых изображений от датчиков 115b для определения градиентов температуры на изображении и, таким образом, определения глубины обработки почвы после того, как почвообрабатывающий агрегат 100 прошел над землей.
[0173] Понятно, что датчикам температуры, таким как датчики 115b, может потребоваться калибровка. Постоянная калибровка тепловизионного датчика может быть выполнена путем обеспечения второго датчика для получения показаний температуры на конкретной глубине.
[0174] Управление агрегатом 100 включает в себя этап (называемый в данном документе «Этапом 5») регулировки глубины для достижения целевого покрытия почвы полевыми отходами, которое регулируется ограничениями, установленными оператором, и возможностями машины. Как отмечалось выше, варианты реализации могут включать в себя камеры, обращенные назад, выполненные с возможностью захвата изображений почвы после завершения прохода почвообрабатывающего агрегата 100 над участком почвы. Эти изображения можно обрабатывать для определения фактического покрытия почвы полевыми отходами. Это фактическое значение полевых отходов можно сравнивать с целевым значением полевых отходов (например, таким, которое может быть установлено оператором). Если фактическое значение слишком велико, система управления может регулировать общую высоту почвообрабатывающего агрегата относительно земли (как описано в отношении этапа 4 выше) для увеличения рабочей глубины почвообрабатывающих инструментов, чтобы они работали глубже в почве, закапывая больше полевых отходов. Напротив, если фактическое значение полевых отходов слишком низкое, система управления может регулировать общую высоту (опять же, как описано выше в отношении этапа 4) для уменьшения рабочей глубины, в меньшей степени углубляя взаимодействующие с землей инструменты в почву. Эта регулировка может быть ограничена по выбору оператора, поскольку он может указать весовое предпочтение равномерной глубины по всему полю в зависимости от целевого охвата полевых отходов по всему полю. Это лучше всего выполнять весной при подготовке поля перед посевом, когда равномерная глубина перед сеялкой будет иметь приоритет над равномерным уровнем полевых отходов. Обратный процесс является более подходящим осенью, когда получение равномерного уровня полевых отходов может быть более приоритетным.
[0175] Управление агрегатом 100 включает в себя этап (называемый в данном документе «Этапом 6») регулировки угла группы для достижения целевого уровня покрытия почвы полевыми отходами в процентах, который регулируется ограничениями, установленными оператором, и возможностями машины. Те же принципы, что и на этапе, могут быть применены к контроллеру 116, регулирующему угол группы взаимодействующих с землей инструментов. Различие заключается в том, что вместо регулировки высоты агрегата регулируют углы сошника/группы дисков. Группы можно регулировать с увеличением угла группы, чтобы закапывать больше полевых отходов, или уменьшением угла группы, чтобы закапывать меньше полевых отходов.
[0176] Управление агрегатом 100 включает этап перенастройки уровня машины по мере необходимости для регулировки глубины или угла группы, что может включать продольное и/или поперечное выравнивание (этот этап перенастройки называется в настоящем документе «Этапом 7»). При регулировке глубины агрегата или угла группы такие изменения могут повлиять на поведение машины при выравнивании. При увеличении или уменьшении угла группы ножи переднего сошника работают больше или меньше по сравнению с ножами заднего сошника и проявляют большую или меньшую тенденцию к углублению в землю G. Сопротивление погружению в землю G, воспринимаемое боковыми секциями, также может увеличивать или уменьшать общую требуемую силу. Эти эффекты могут потребовать перенастройки уровня машины в продольном направлении (см. этап 1 выше) и/или в боковом направлении (см. этапы 2 и 3 выше) после изменения глубины или угла группы. После выравнивания для перенастройки также может потребоваться регулировка общей высоты рамы 102 почвообрабатывающего агрегата (см. Этап 4), регулировка глубины (см. Этап 5) и/или регулировка угла группы (см. Этап 6). Таким образом, при необходимости этапы 1-6 могут повторяться непрерывно во время работы почвообрабатывающего агрегата 100 на участке поля.
[0177] Положение приспособления для обрезки растительных полевых отходов и/или прижимная сила также могут быть отрегулированы для достижения желаемых результатов, хотя это чаще используется для достижения целевой горизонтальности, чем целевого уровня полевых отходов.
[0178] Система управления и датчики выполнены с возможностью достижения множества целей или целевых настроек для результатов обработки почвы, таких как определение и регулировка горизонтальности, равномерной глубины, равномерного и желаемого уровня полевых отходов, желаемого уровня поверхностной влажности, температурного градиента, размера комков и т.п. Настройки для реализации рабочих параметров (таких как глубина, угол группы, уровень в направлении вперед/назад и т.п.) могут влиять на множество целевых параметров, а агрегат предпочтительно позволяет оператору устанавливать приоритеты целевых параметров и устанавливать ограничения целевых параметров, в то время как контроллер осуществляет процедуру выполнения корректировок и наблюдения за результатами обработки почвы с определением наилучшего набора значений для достижения желаемых результатов.
Настройки и параметры пользовательского интерфейса
[0179] Почвообрабатывающий агрегат 100 также предпочтительно включает в себя пользовательский интерфейс 150 (см. ФИГ. 14), функционально связанный с контроллером 116 и выполненный с возможностью отображения одного или более параметров состояния почвы для оператора почвообрабатывающего агрегата 100. Подобно предыдущему варианту реализации, предупреждение может отображаться оператору (например, посредством пользовательского интерфейса 150), если параметр состояния почвы превышает соответствующее целевое значение или диапазон значений параметра.
[0180] Пользовательский интерфейс 150 также выполнен с возможностью приема целевых настроек для результатов обработки почвы, получаемых при работе почвообрабатывающего агрегата 100. В предпочтительных вариантах реализации пользовательский интерфейс 150 может быть расположен в кабине буксирующего транспортного средства, используемого для перемещения почвообрабатывающего агрегата 100.
[0181] Целевые настройки, связанные с почвообрабатывающим агрегатом 100, могут включать в себя целевые настройки для рабочих глубин взаимодействующих с землей инструментов, целевые настройки для закрытия полевых отходов, целевые настройки для углов групп взаимодействующих с землей инструментов и/или другие целевые настройки, связанные с работой агрегата. Пользовательский интерфейс 150 также может быть выполнен с возможностью создания карты для ввода целевых настроек, связанных с конкретными местоположениями и/или областями поля. В таких вариантах реализации карта может содержать предписанную карту GPS, которая включает в себя информацию о геолокации, полученную от системы GPS. Данные от датчиков, обращенных назад (таких как датчики 114, 115b), могут использоваться для регулировки настроек карты, предписанной системой GPS.
[0182] Предпочтительно система управления выполнена с обеспечением возможности для оператора вводить целевые настройки (например, посредством пользовательского интерфейса 150) для результатов обработки почвы и/или определять приоритет результатов обработки почвы, причем целевые настройки могут включать в себя по меньше мере одно из целевой глубины, целевого уровня полевых отходов/покрытия, целевой горизонтальности почвы, целевого размера комков почвы, целевого значения уровня агрегата, целевой влажности почвы и целевого градиента температуры. Предпочтительная система управления также выполнена с обеспечением возможности для оператора вводить ограничения для параметров агрегата и/или устанавливать приоритеты для параметров агрегата (что может быть выполнено посредством пользовательского интерфейса 150), при этом параметры агрегата включают в себя по меньшей мере одно из скорости агрегата, фактического значения уровня, фактической глубины и угла группы.
[0183] В предпочтительных вариантах реализации контроллер 116 предпочтительно выполнен с возможностью определения приоритета и/или регулировки одного или более параметров агрегата для получения одного или более результатов обработки почвы. В одном примере уровень полевых отходов, образующихся при проходе агрегата, может влиять на параметры агрегата, такие как скорость, продольный уровень, глубина и угол группы. Если оператор выбирает максимальную глубину (например, 2,5 дюйма), контроллер 116 предпочтительно будет регулировать глубину не больше, чем установка максимальной глубины (2,5 дюйма), одновременно регулируя один или более других параметров агрегата для достижения целевого результата обработки почвы. Например, для получения целевого уровня полевых отходов, не превышая настройки максимальной глубины, контроллер 116 может ограничивать глубину агрегата, одновременно увеличивая угол группы, изменяя скорость агрегата и/или регулируя продольный уровень агрегата глубже спереди агрегата.
[0184] В другом примере на горизонтальность почвы, создаваемую проходом агрегата, могут влиять такие параметры агрегата, как скорость, продольный уровень, глубина и угол группы. Предпочтительно контроллер 116 работает в соответствии с ограничениями параметров агрегата, установленными оператором, для регулировки одного или более параметров агрегата для получения целевой горизонтальности почвы. При достижении целевой горизонтальности почвы контроллер 116 также предпочтительно получает целевой уровень полевых отходов. Для поддержки как целевой горизонтальности почвы, так и целевого уровня полевых отходов, контроллеру 116 может потребоваться регулировка множества параметров агрегата.
[0185] Опять же, контроллер 116 также предпочтительно выполнен с обеспечением возможности для оператора определять приоритеты результатов обработки почвы относительно друг друга. Система управления предпочтительно выполнена с обеспечением возможности для оператора вводить значение приоритета для каждого результата обработки почвы (например, посредством пользовательского интерфейса 150). Например, система управления может разрешить оператору устанавливать приоритет целевого уровня полевых отходов над целевой горизонтальностью почвы. И наоборот, оператор может назначить целевую горизонтальность почвы выше целевого уровня полевых отходов.
[0186] Если контроллер 116 не может одновременно поддерживать множество результатов обработки почвы (например, целевую горизонтальность почвы и целевой уровень полевых отходов), то контроллер 116 предпочтительно будет приоритезировать получение результата обработки почвы с наивысшим приоритетом, одновременно пытаясь достичь одного или более результатов обработки почвы с более низким приоритетом. Например, если целевой уровень полевых отходов имеет наивысший приоритет, контроллер будет отдавать приоритет получению целевого уровня полевых отходов, а не целевой горизонтальности почвы. Контроллер также может уведомлять оператора (например, посредством пользовательского интерфейса 150) о том, что один или более результатов обработки почвы не достигнуты, и может рекомендовать дополнительные действия для достижения указанных результатов.
[0187] В дополнение к карте, созданной пользовательским интерфейсом 150, целевые настройки могут быть разработаны на основании данных о почве, таких как органическое вещество, тип почвы, урожайность предыдущих культур, местность, процент уклона и/или влажность.
[0188] Варианты реализации почвообрабатывающего агрегата 100 могут включать в себя датчики для обнаружения и измерения параметров состояния почвы. Например, один или более датчиков 113, 114, 115 могут быть выполнены с возможностью измерения количества сельхозкультурных/растительных полевых отходов на земле G и/или значения гладкости/шероховатости земли G. Предпочтительно оператор может выбирать (например, посредством пользовательского интерфейса 150) желаемый уровень шероховатости почвы и уменьшения полевых отходов. Варианты реализации настоящего изобретения могут предоставлять средства для измерения и предупреждения оператора (например, посредством пользовательского интерфейса 150), если настройки почвообрабатывающего оборудования соответствуют намеченным целям. Варианты реализации настоящего изобретения могут использовать анализ первой и второй производных от данных датчика для определения гладкости поверхности, шероховатости и качества работы.
[0189] Данные карты глубины могут использоваться вариантами реализации почвообрабатывающего агрегата 100 для измерения параметров состояния почвы (которые могут иметь отношение к последующему посеву сельскохозяйственных культур). Например, почвообрабатывающий агрегат 100 предпочтительно выполнен с возможностью измерения изменений состояния почвы, связанных с ручными или автоматическими регулировками агрегата 100.
[0190] Кроме того, пользовательский интерфейс 150 может обеспечивать возможность для оператора вручную менять любые целевые настройки для получения желаемого или целевого результата. На основании ручной регулировки целевых настроек и/или параметров машины агрегат 100 может быть выполнен с возможностью последующего сбора новых данных датчиков, связанных с ручными регулировками, и разработки новых целевых настроек на основании новых данных датчиков. Затем пользовательский интерфейс 150 может разрешить оператору принимать новые целевые настройки для достижения желаемого или целевого результата.
[0191] Варианты реализации агрегата 100 могут быть выполнены с возможностью сравнения результатов обработки почвы с целевыми настройками и последующей рекомендации оператору следующих действий на основании GPS, если результаты обработки почвы не соответствуют желаемым целевым показателям или целям. Например, агрегат 100 может давать рекомендацию выполнить второй проход с тем же самым инструментом агрегата для дальнейшего уменьшения полевых отходов или шероховатости, если цель не была достигнута после первого прохода. Кроме того, агрегат 100 может рекомендовать использование альтернативного инструмента, который отличается от текущего инструмента (например, когда альтернативный инструмент является более агрессивным или менее агрессивным инструментом) для достижения целевого результата за один проход. Одним из примеров рекомендуемой смены инструмента может быть переключение с дисковой бороны на полевой культиватор.
[0192] В случаях, когда агрегат 100 рекомендует выполнить второй проход с тем же инструментом агрегата, агрегат 100 может быть выполнен с возможностью осуществления второго прохода в автономном режиме. Хотя автономный второй проход может проводиться по всему полю, в рамках настоящего изобретения агрегат 100 выполняет второй проход только в одном или более участков поля.
[0193] В случаях, когда агрегат 100 рекомендует локальную вторичную операцию на основании GPS, агрегат 100 может быть выполнен с возможностью выполнения вторичной операции с помощью второго автономного инструмента, которая может быть выполнена в более позднее время. Однако принципы настоящего изобретения также применимы к агрегату 100 для передачи рекомендаций относительно вторичных операций второму агрегату до завершения основной операции агрегатом 100 или практически одновременно с ней. Например, если оба агрегата работают на одном поле, обмен данными между агрегатами может обеспечивать выполнение и/или завершение первичных и вторичных операций для всего поля одновременно.
Контроллер
[0194] Контроллер 116 предназначен для измерения и управления высотой почвообрабатывающего агрегата 100, а также для управления почвообрабатывающим агрегатом на основании измеренного состояния почвы.
[0195] Как описано в отношении предыдущего варианта реализации, контроллер 116 и пользовательский интерфейс 150 предпочтительно обеспечены как часть вычислительного устройства. Как подробно объяснено выше, вычислительное устройство может включать в себя один или более процессоров и элементов памяти.
[0196] Как отмечалось ранее, изображенный контроллер 116 выполнен с возможностью приема информации о высоте от передних и задних датчиков 113a, 113b. Например, контроллер 116 предпочтительно выдает инструкции для узла 108 выравнивания, чтобы регулировать продольную ориентацию центральной секции 120 на основании полученной информации о высоте. Опять же, значения высоты от переднего и заднего датчиков 113a, 113b предпочтительно сравниваются друг с другом посредством контроллера 116 для определения разности между значениями. Когда разность находится за пределами диапазона целевого уровня, контроллер 116 предпочтительно посылает сигнал для выдвижения или втягивания гидравлического исполнительного механизма 106d.
[0197] Контроллер 116 также выполнен с возможностью приема информации о высоте от датчиков 113a, 113c, 113d для выравнивания секций рамы почвообрабатывающего агрегата 100 в боковом направлении. Предпочтительно контроллер 116 выполнен с возможностью сравнения значения высоты передней части от переднего датчика 113a центральной секции 120 и значений высоты от датчиков 113c, 113d боковых секций 122a, 122b, 124a, 124b для определения фактического (т.е. измеренного) значения уровня основной рамы 102 в боковом направлении.
[0198] Контроллер 116 также предпочтительно выполнен с возможностью приема проектного целевого значения бокового уровня и/или диапазона значений целевого уровня. Кроме того, контроллер 116 выполнен с возможностью сравнивания фактического значения бокового уровня с целевым значением бокового уровня или диапазоном целевых значений бокового уровня. Если разность уровней в боковом направлении выходит за пределы целевого диапазона значений уровней, контроллер 116 предпочтительно посылает сигнал для выдвижения или втягивания соответствующего гидравлического исполнительного механизма 106a, 106b, 106c. Согласование разности уровней в боковом направлении предпочтительно включает согласование внутренних боковых секций 122a, 124a, соответствующих центральной секции 120, а затем наружных боковых секций 122b, 124b, соответствующих внутренним боковым секциям 122a, 124a.
[0199] Как обсуждалось выше, контроллер 116 выполнен с возможностью увеличения или уменьшения давления на гидравлические исполнительные механизмы 106b, 106c, когда необходимо отрегулировать высоту одной или более боковых секций 122a, 122b, 124a, 124b (например, когда перепад уровней в боковом направлении находится вне пределов целевого диапазона).
[0200] Контроллер 116 также может анализировать изображения, полученные от датчиков 113, 114, 115, для определения фактического покрытия почвы полевыми отходами растительных материалов. Предпочтительно контроллер также выполнен с возможностью сравнения фактического (измеренного) покрытия почвы полевыми отходами с целевым покрытием почвы полевыми отходами.
[0201] Если фактическое покрытие почвы полевыми отходами больше целевого покрытия почвы полевыми отходами, контроллер 116 выполнен с возможностью спуска по меньшей мере части основной рамы 102 почвообрабатывающего агрегата 100 для увеличения рабочей глубины соответствующих взаимодействующих с землей инструментов почвообрабатывающего агрегата 100. Дополнительно или в качестве альтернативы, если фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами, контроллер 116 может быть выполнен с возможностью увеличения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата.
[0202] Подобным образом, если фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами, контроллер 116 выполнен с возможностью подъема по меньшей мере части основной рамы 102 почвообрабатывающего агрегата 100 для уменьшения рабочей глубины соответствующих взаимодействующих с землей инструментов почвообрабатывающего агрегата 100. Дополнительно или в качестве альтернативы, если фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами, контроллер 116 выполнен с возможностью уменьшения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата 100.
[0203] Контроллер 116 также выполнен с возможностью обработки информации, полученной времяпролетными датчиками 113, 114, 115, для выработки одного или более параметров состояния почвы. Варианты реализации контроллера 116 также выполнены с возможностью автоматического управления работой одного или более компонентов почвообрабатывающего агрегата 100 на основании одного или более параметров качества почвы.
[0204] Например, контроллер 116 может автоматически управлять работой почвообрабатывающего агрегата 100, регулируя скорость почвообрабатывающего агрегата 100 и/или регулируя положение взаимодействующих с землей инструментов почвообрабатывающего агрегата 100. Примеры регулировки положения взаимодействующих с землей инструментов включают в себя смещение глубины, на которую взаимодействующие с землей инструменты заглубляются в землю, и/или смещение угла группы взаимодействующих с землей инструментов. Что касается смещения глубины взаимодействующих с землей инструментов, в рамках настоящего изобретения все инструменты на агрегате или частичная группа инструментов должны смещаться друг с другом. Однако множество инструментов могут перемещаться отдельно друг от друга, чтобы можно было регулировать глубину каждого инструмента независимо от других инструментов.
[0205] Регулировка положения взаимодействующего с землей инструмента также может включать в себя регулировку угла стойки относительно земли. Те стойки, которые катятся впереди в направлении перемещения, имеют тенденцию к заглублению, а те, которые катятся сзади по верху почвы, как правило, всплывают из почвы. Эти тенденции в первую очередь вызваны углом атаки плоскорезной лапы или наральника, проходящих в почве. В другом примере настоящего изобретения рыхлительное долото можно регулировать, перемещая передние режущие лезвия глубже или мельче, удерживая стойки на постоянной глубине, чтобы соответствующим образом изменять уровень полевых отходов.
[0206] Варианты реализации контроллера 116 могут быть выполнены с возможностью отображения одного или более параметров состояния почвы оператору (например, посредством пользовательского интерфейса 150). Кроме того, контроллер 116 может вырабатывать предупреждение, если параметры состояния почвы превышают целевой параметр состояния почвы.
[0207] Контроллер 116 также может быть выполнен с возможностью создания карт глубины на основании времяпролетных изображений после того, как почвообрабатывающий агрегат 100 выполнил проход по земле. Карты глубин могут содержать матрицу значений глубины, соответствующих пикселям времяпролетных изображений. Контроллер 116 может использовать указанную матрицу для идентификации объектов и расстояний между объектами. Контроллер 116 также может использовать указанную матрицу для определения и регулирования уровня влажности, уровня полевых отходов, температурного градиента, размера комков и т.п.
[0208] Хотя настоящее изобретение было описано подробно, следует понимать, что в него могут быть внесены различные изменения, замены и поправки без отклонения от сущности и объема охраны изобретения, определенных приложенной формулой.
[0209] Описанные выше предпочтительные формы изобретения должны использоваться только в качестве иллюстрации и не должны использоваться в ограничивающем смысле при интерпретации объема охраны настоящего изобретения. Очевидные модификации приведенных для примера вариантов реализации, как изложено выше, могут быть легко осуществлены специалистами в данной области техники без отклонения от сущности настоящего изобретения.
[0210] Настоящим изобретатели заявляют о своем намерении полагаться на Доктрину эквивалентов для определения и оценки разумно справедливого объема настоящего изобретения в отношении любого устройства, по существу не выходящего, но выходящего за пределы буквального объема изобретения, как изложено в приложенной формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2008 |
|
RU2495553C2 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2003 |
|
RU2247477C1 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И КОМБИНИРОВАННОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ (ВАРИАНТЫ) | 2008 |
|
RU2370934C1 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ МОНИТОРИНГА КРИТЕРИЕВ ПОЧВЫ ВО ВРЕМЯ ОПЕРАЦИЙ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЕ ПОЧВООБРАБАТЫВАЮЩИМИ РАБОЧИМИ ОРГАНАМИ | 2016 |
|
RU2720278C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ОБРАБОТКОЙ ПОЧВЫ СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ (ВАРИАНТЫ) | 2013 |
|
RU2580449C2 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ЖИДКОСТЕЙ | 2016 |
|
RU2734483C2 |
| СПОСОБ ОБРАБОТКИ ПОЧВЫ С ВНЕСЕНИЕМ УДОБРЕНИЙ И ПОСЕВОМ, ПОЧВООБРАБАТЫВАЮЩИЙ ПОСЕВНОЙ АГРЕГАТ | 2007 |
|
RU2362288C2 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ ПОСЕВНОЙ АГРЕГАТ | 2008 |
|
RU2377749C1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ (БОРОНА ПЛЮС ВИНТОВОЙ КАТОК) | 2010 |
|
RU2435345C1 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 1995 |
|
RU2091998C1 |
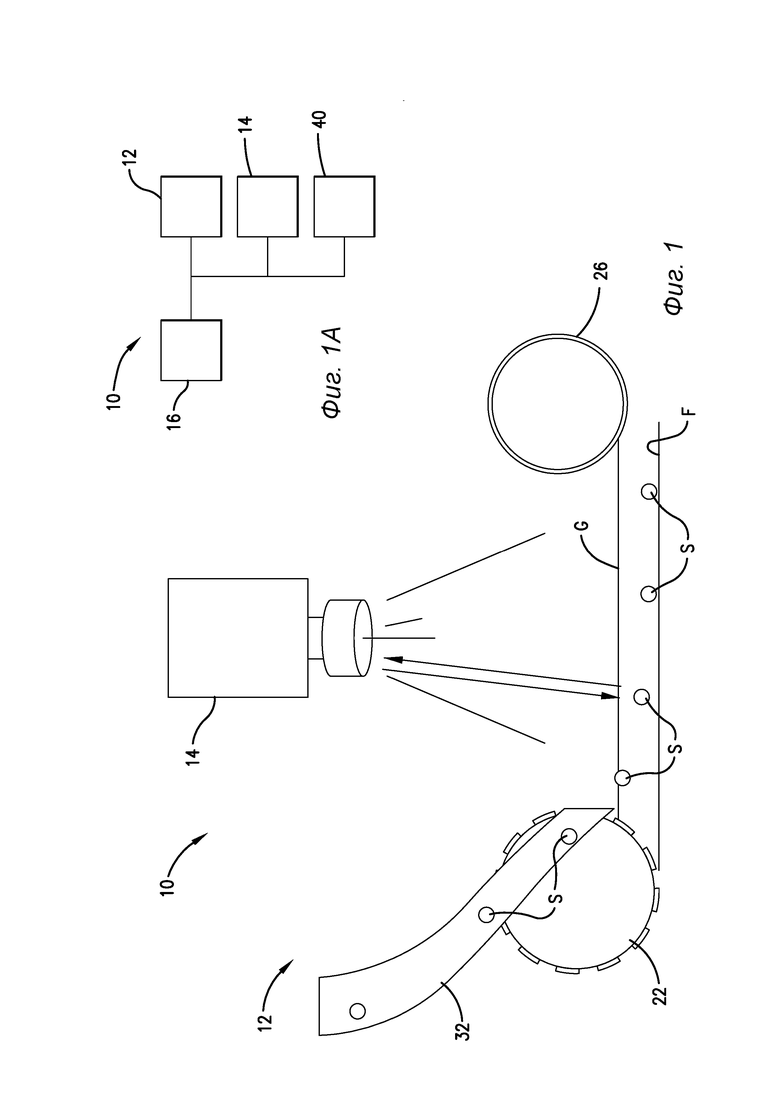
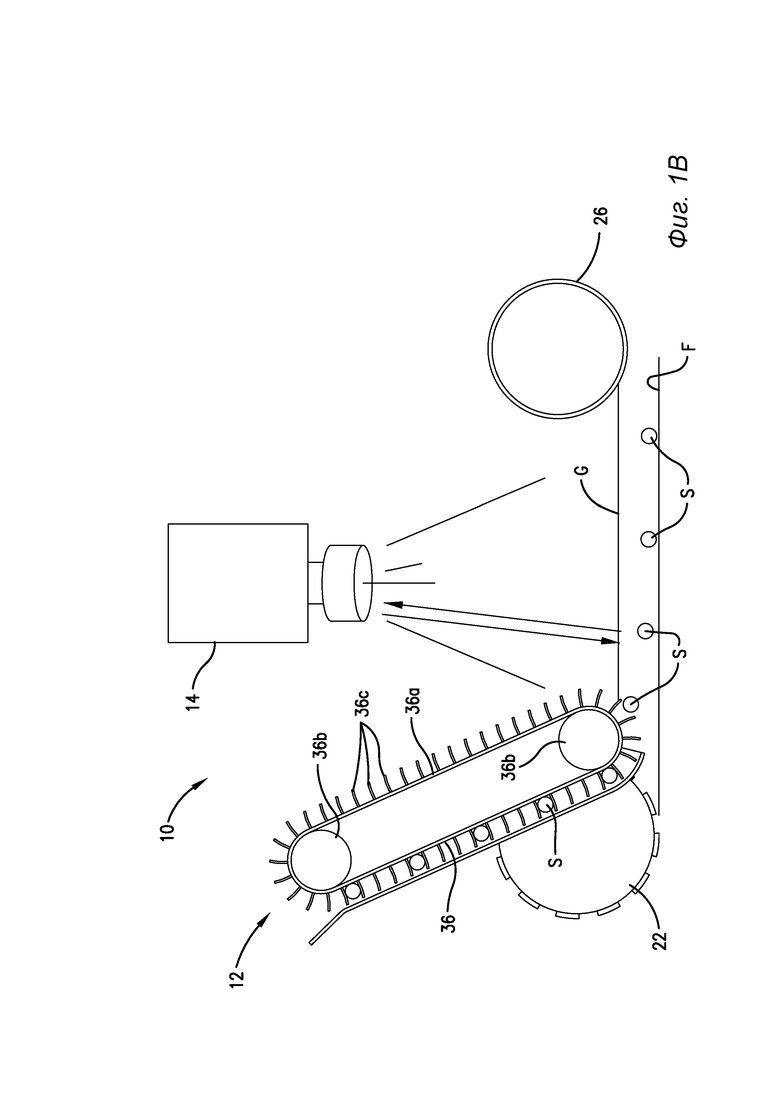
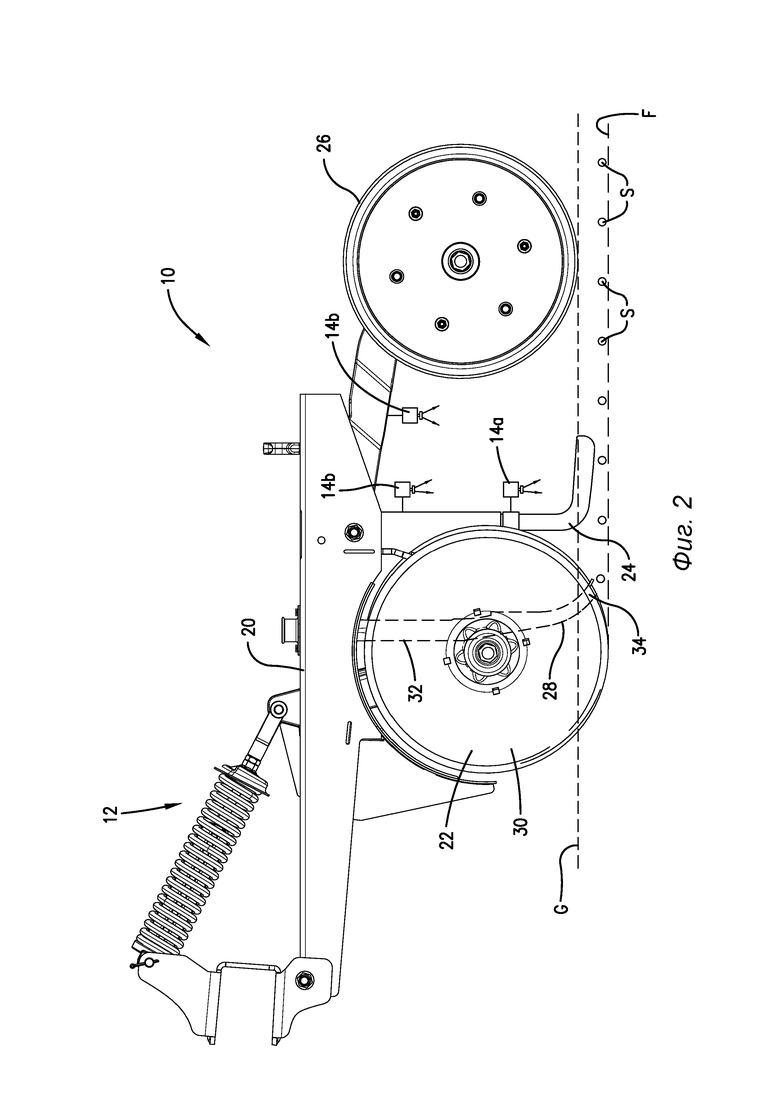
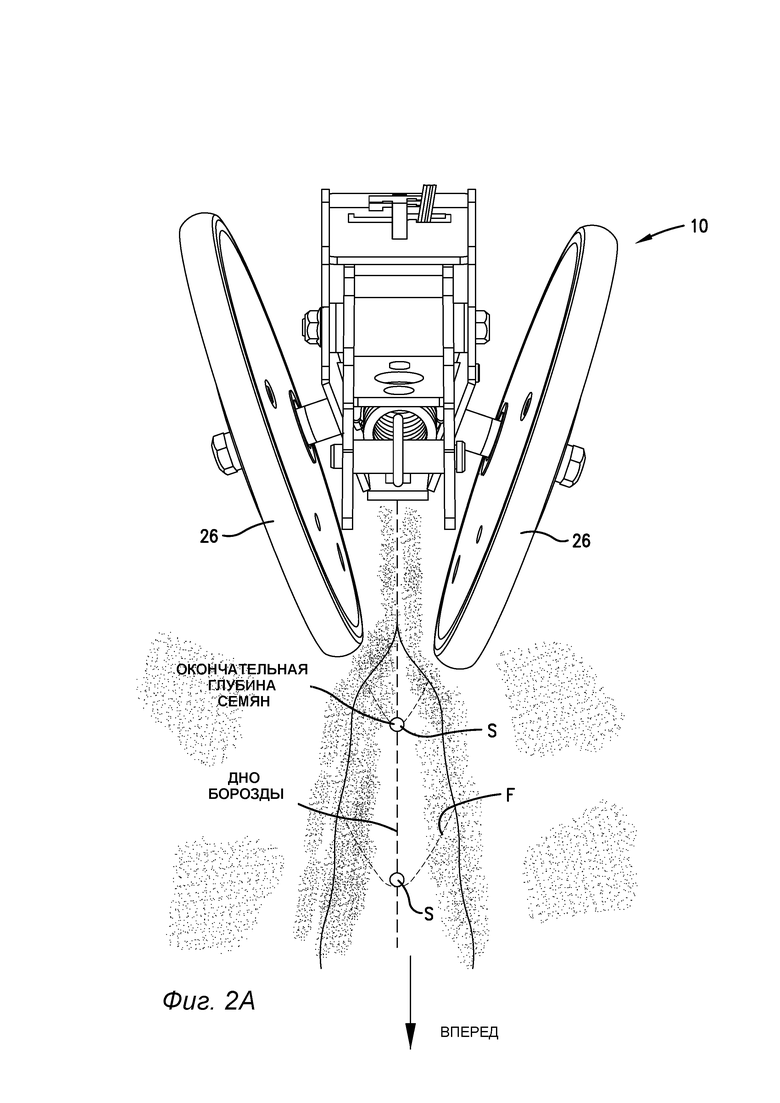

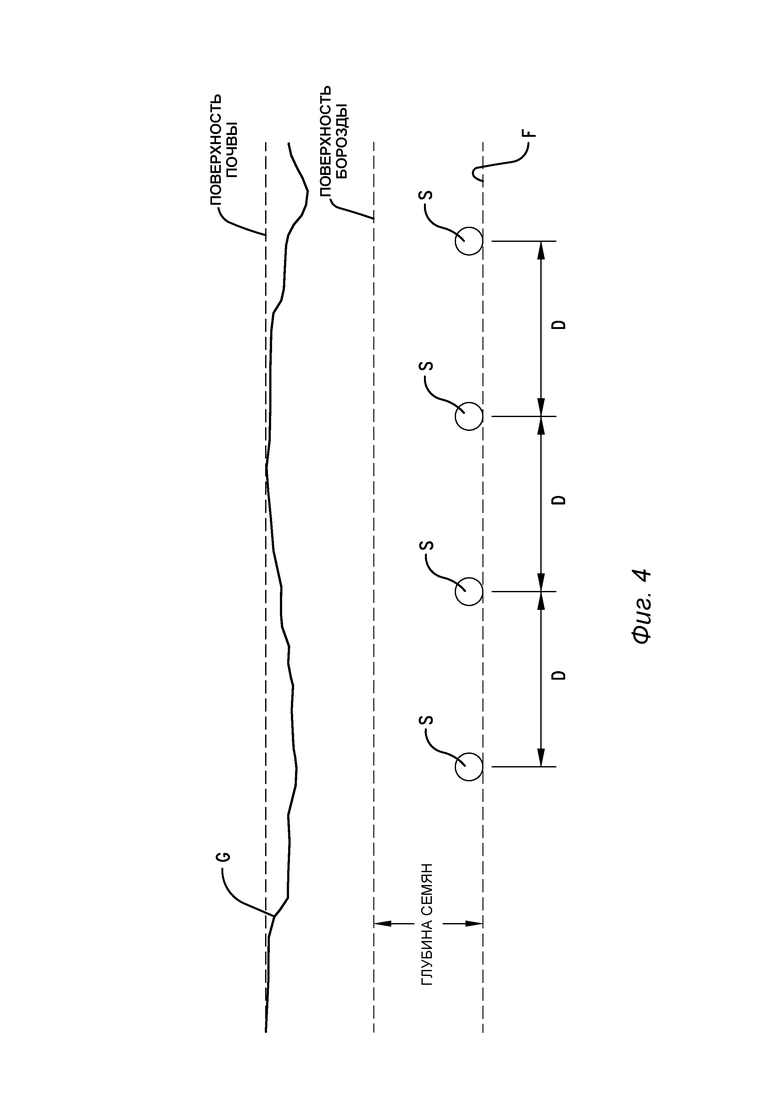

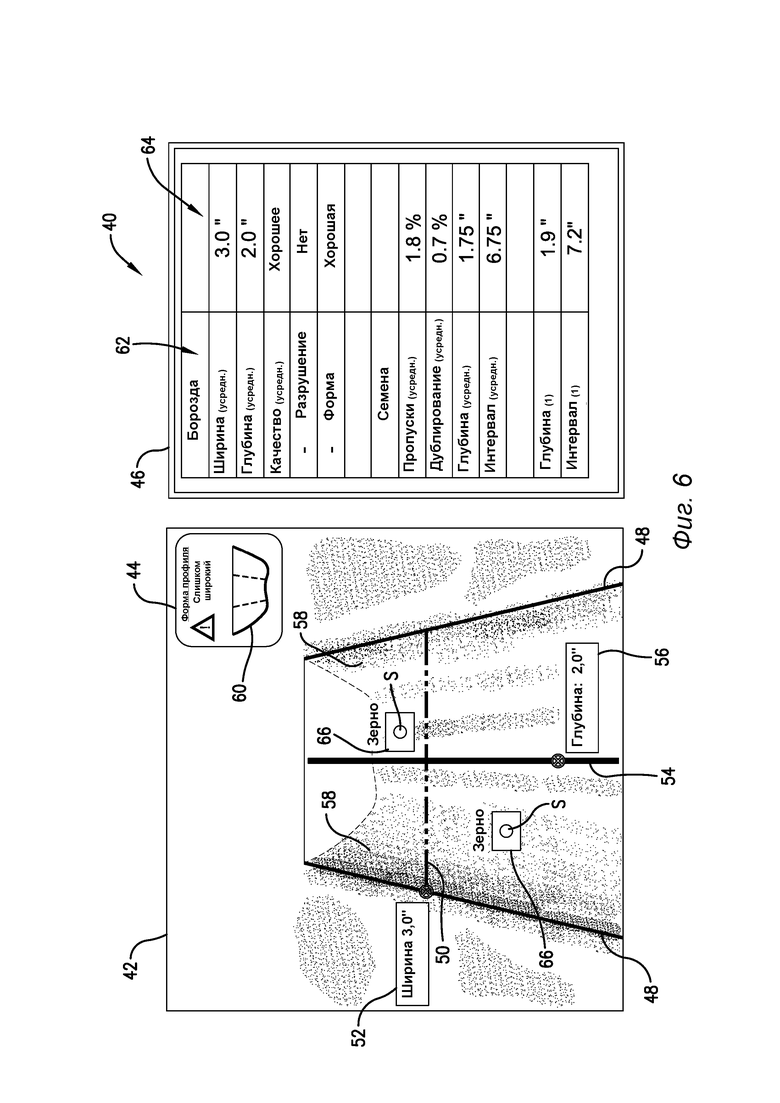
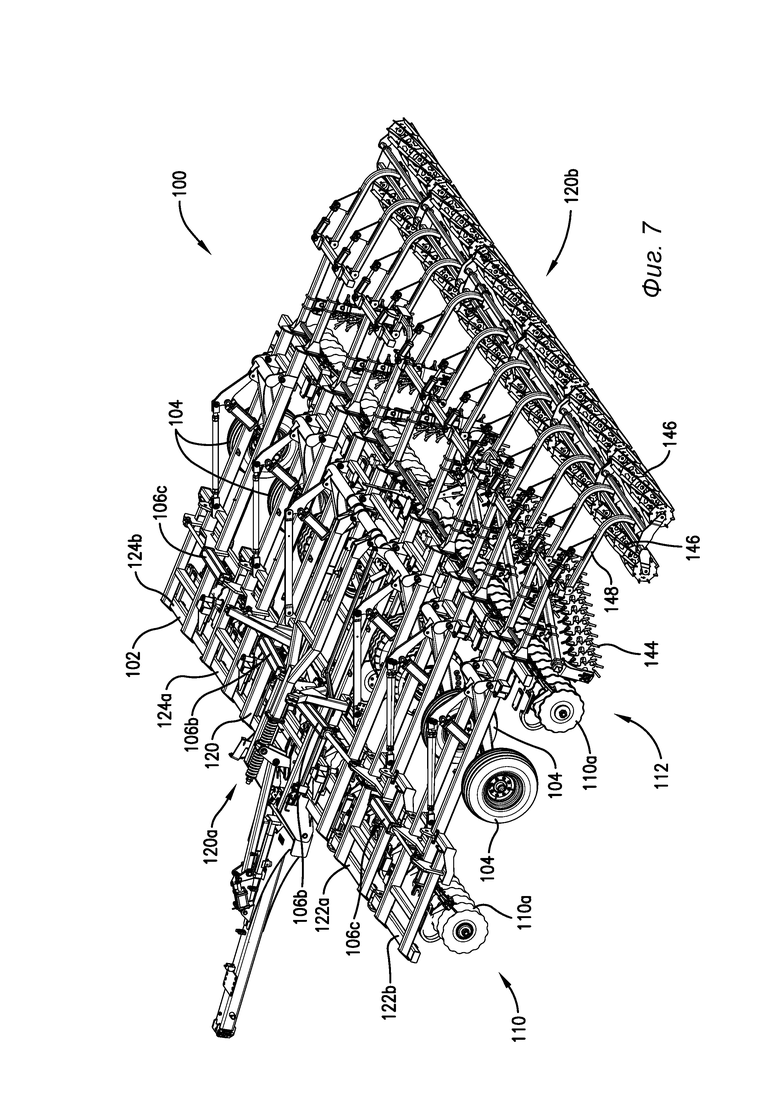

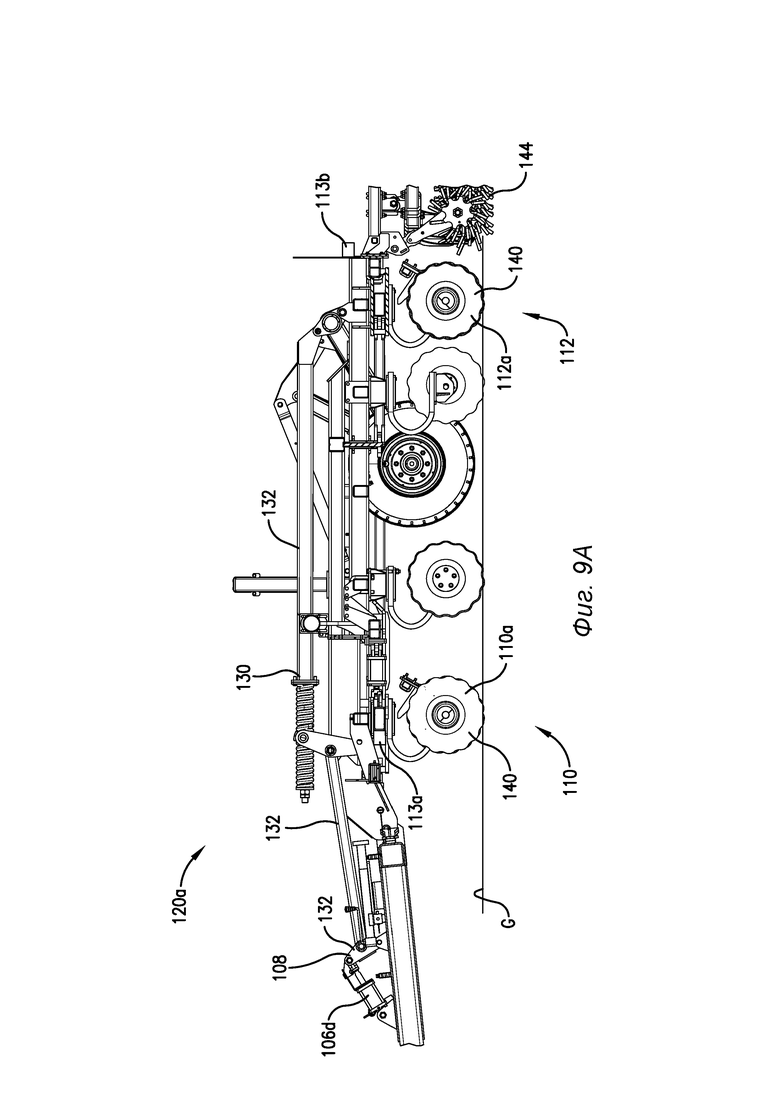
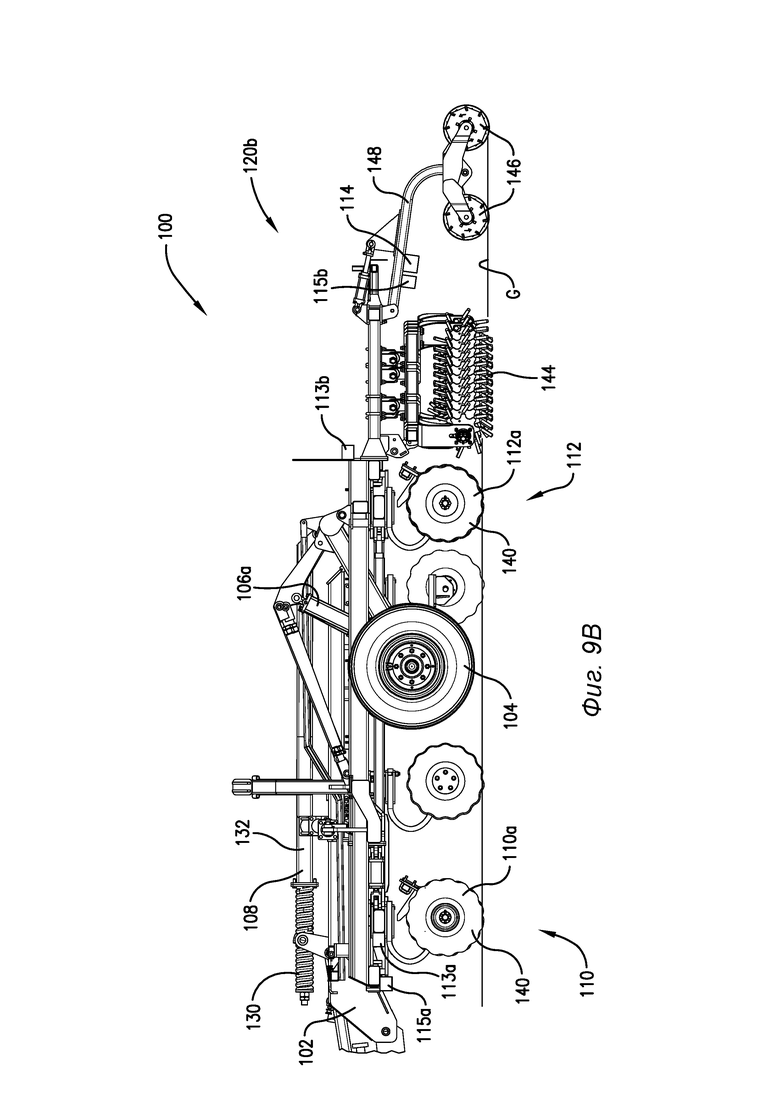
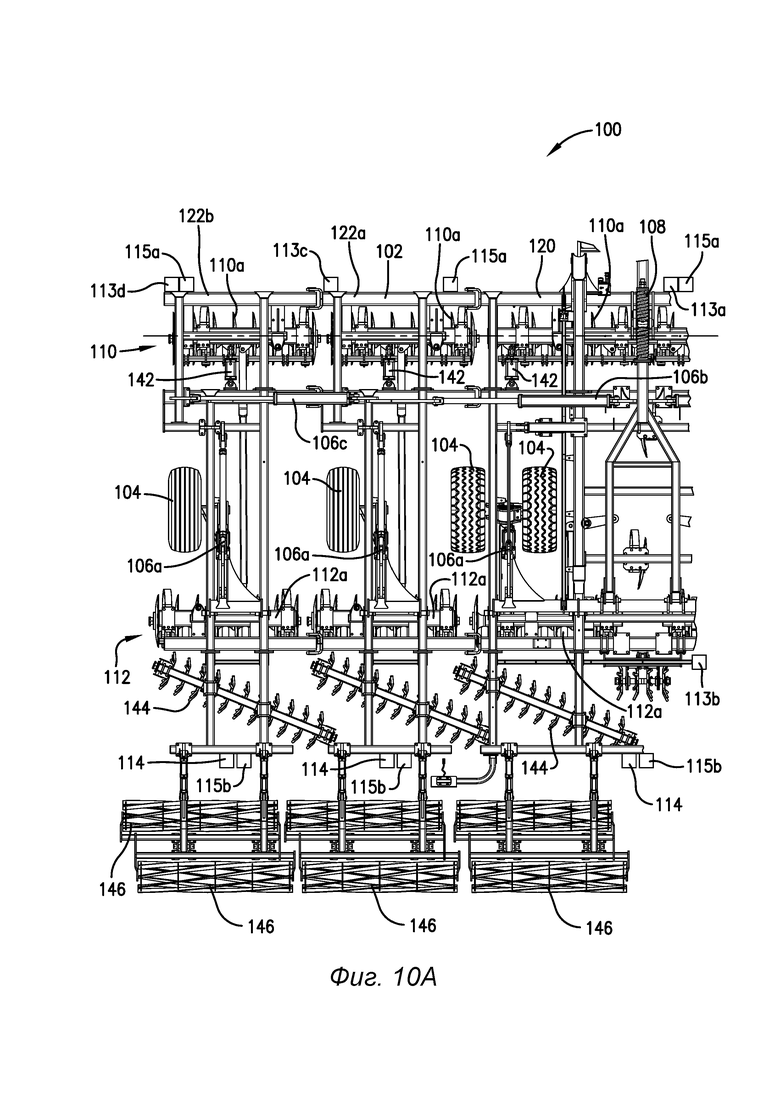

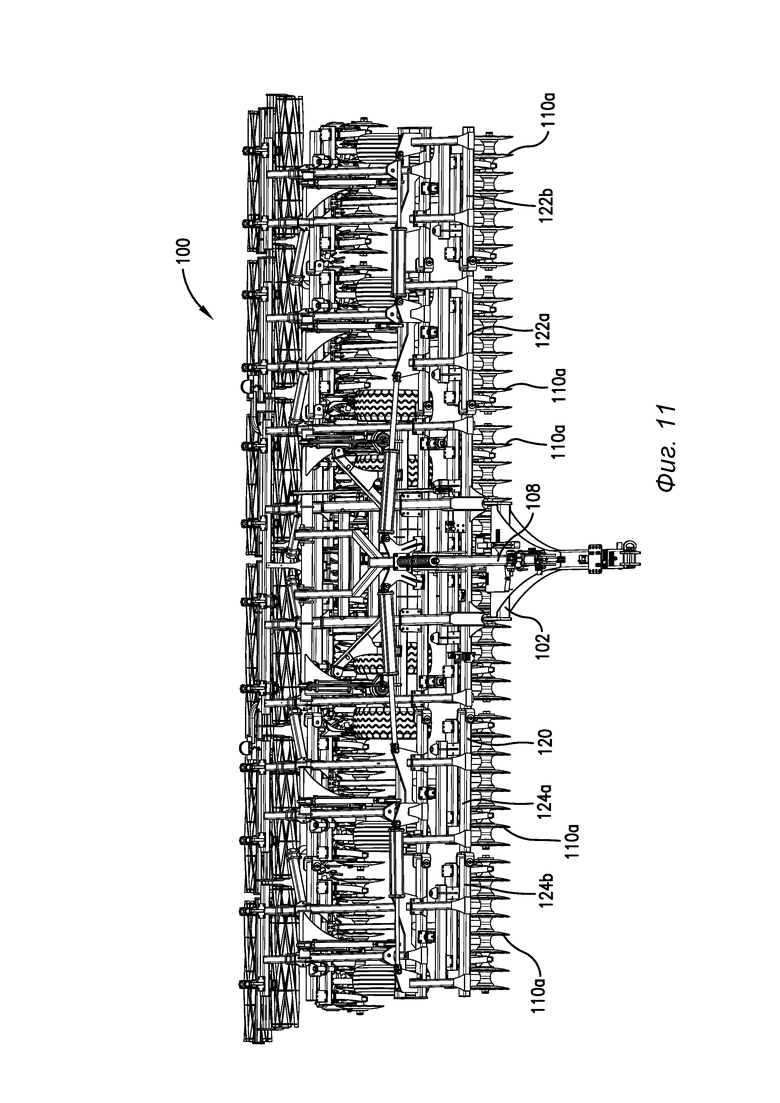
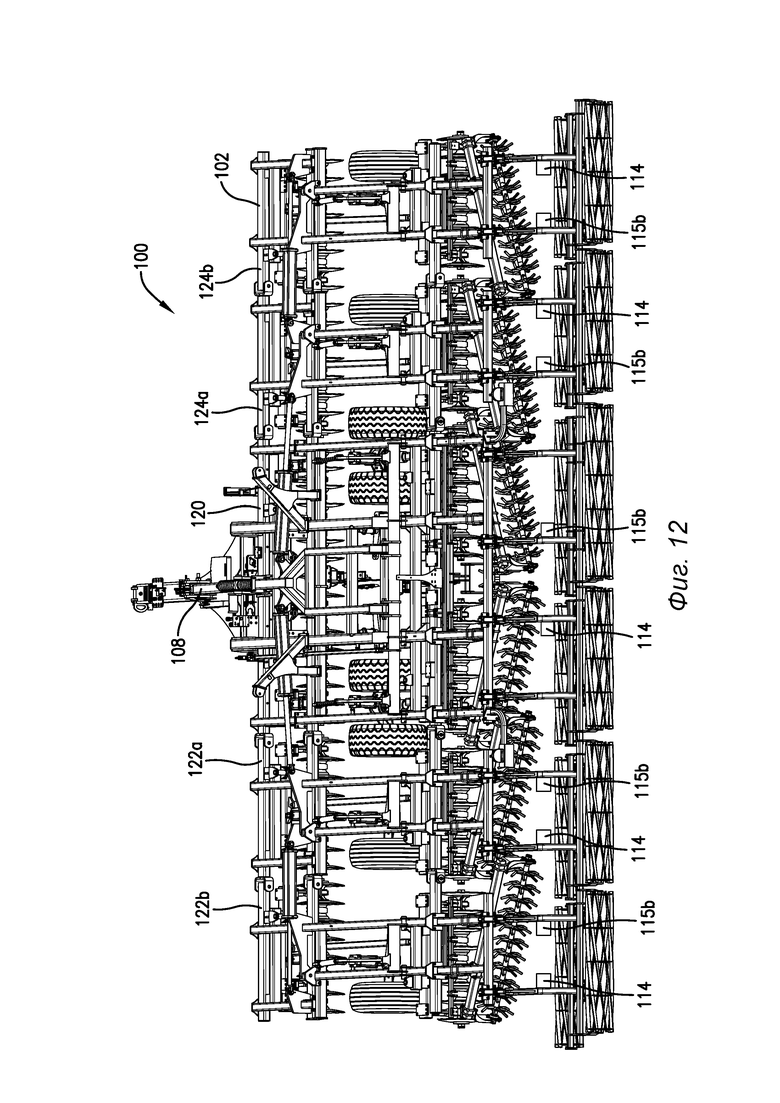

Группа изобретений относится к сельскому хозяйству. Почвообрабатывающий агрегат для обработки почвы содержит раму, поддерживаемую над землей посредством одного или более колес; множество взаимодействующих с землей инструментов, поддерживаемых рамой и выполненных с возможностью взаимодействия с землей для обработки земли; по меньшей мере один времяпролетный датчик, выполненный с возможностью получения информации, указывающей на параметры состояния почвы на земле; контроллер, выполненный с возможностью обработки информации, полученной по меньшей мере одним времяпролетным датчиком, для генерации параметров состояния почвы. Контроллер дополнительно выполнен с возможностью автоматического управления работой одного или более компонентов почвообрабатывающего агрегата на основании параметров состояния почвы. Контроллер выполнен с возможностью приоритизации параметров состояния почвы и автоматического управления работой одного или более компонентов почвообрабатывающего агрегата на основе приоритета параметров состояния почвы. Параметры состояния почвы выбраны из следующего: однородность полевых отходов на земле, однородность комков почвы на земле, и горизонтальность почвы. Система обработки почвы почвообрабатывающим агрегатом, выполненным с возможностью обработки почвы, и включающим в себя центральную секцию. Система управления содержит передний датчик, расположенный спереди центральной секции, выполненный с возможностью получения информации о высоте, указывающей высоту передней части центральной секции над землей; задний датчик, расположенный сзади центральной секции, выполненный с возможностью получения информации о высоте, указывающей высоту задней части центральной секции над землей; узел выравнивания, выполненный с возможностью регулировки продольной ориентации центральной секции; и контроллер, выполненный с возможностью приема информации о высоте от переднего датчика и информации о высоте от заднего датчика, а также подачи инструкций в узел выравнивания для регулировки продольной ориентации центральной секции на основании полученной информации о высоте. Почвообрабатывающий агрегат дополнительно включает левую боковую секцию и правую боковую секцию, а также исполнительные механизмы, соединяющие центральную секцию с каждой из боковых секций для складывания боковых секций вверх и/или вниз. Каждая боковая секция включает датчик, выполненный с возможностью получения информации о высоте, указывающей высоту боковой секции над землей. Система управления выполнена с возможностью сравнения высоты боковых секций с высотой центральной секции. Система управления выполнена с возможностью предоставления инструкций исполнительным механизмам для выравнивания уровня боковых секций с уровнем боковых секций относительно центральной секции. Способ обработки почвы почвообрабатывающим агрегатом, выполненным с возможностью обработки почвы, и включающим в себя центральную секцию, а также дополнительно включающим в себя левую боковую секцию, правую боковую секцию и исполнительные механизмы, проходящие от центральной секции к каждой боковой секции. Каждая боковая секция включает в себя датчик, выполненный с возможностью получения информации о высоте, указывающей высоту боковой секции над землей. Способ обработки почвы почвообрабатывающим агрегатом включает этапы: (а) получения посредством переднего датчика, расположенного на передней части центральной секции, информации о высоте, указывающей высоту передней части центральной секции над землей; (b) получения посредством заднего датчика, расположенного на задней части центральной секции, информации о высоте, указывающей высоту задней части центральной секции над землей; (c) сравнения посредством контроллера высоты передней части центральной секции с высотой задней части центральной секции; (d) предоставления инструкций для узла выравнивания, связанного с центральной секцией, для регулировки продольной ориентации центральной секции на основании сравнения, выполненного на этапе (c); (e) складывания по меньше мере одной из боковых секций вверх и/или вниз с помощью соответствующего исполнительного механизма; (f) сравнения посредством контроллера, высоты боковых секций с высотой центральной секции; и (g) предоставления инструкций посредством системы управления исполнительному механизму на выравнивание уровней боковых секций к уровню боковых секций относительно центральной секции. Обеспечивается повышение точности определения состояния почвы и полевых отходов на разных участках поля. 3 н. и 41 з.п. ф-лы, 19 ил.
1. Почвообрабатывающий агрегат для обработки почвы, содержащий:
раму, поддерживаемую над землей посредством одного или более колес;
множество взаимодействующих с землей инструментов, поддерживаемых рамой и выполненных с возможностью взаимодействия с землей для обработки земли;
по меньшей мере один времяпролетный датчик, выполненный с возможностью получения информации, указывающей на параметры состояния почвы на земле, при этом параметры состояния почвы выбраны из следующего: однородность полевых отходов на земле, однородность комков почвы на земле, и горизонтальность почвы; и
контроллер, выполненный с возможностью обработки информации, полученной по меньшей мере одним времяпролетным датчиком, для генерации параметров состояния почвы, при этом контроллер дополнительно выполнен с возможностью автоматического управления работой одного или более компонентов почвообрабатывающего агрегата на основании параметров состояния почвы,
при этом контроллер выполнен с возможностью приоритизации параметров состояния почвы и автоматического управления работой одного или более компонентов почвообрабатывающего агрегата на основе приоритета параметров состояния почвы.
2. Почвообрабатывающий агрегат по п. 1, в котором указанный по меньшей мере один времяпролетный датчик содержит времяпролетную камеру.
3. Почвообрабатывающий агрегат по п. 1, в котором указанный по меньшей мере один времяпролетный датчик содержит по меньшей мере один из датчиков, содержащих массив чувствительных пикселей для определения местоположения объектов в трехмерном (3D) пространстве, таких как времяпролетная камера, датчик LiDAR, радиолокационный датчик, ультразвуковой датчик и гидролокационный датчик.
4. Почвообрабатывающий агрегат по п. 1, в котором указанные параметры состояния почвы включают в себя значение гладкости или шероховатости поверхности.
5. Почвообрабатывающий агрегат по п. 1, в котором указанное управление работой почвообрабатывающего агрегата, автоматически управляемого контроллером, включает в себя регулировку скорости почвообрабатывающего агрегата.
6. Почвообрабатывающий агрегат по п. 1, в котором указанное управление работой почвообрабатывающего агрегата, автоматически управляемого контроллером, включает в себя регулировку положения взаимодействующих с землей инструментов.
7. Почвообрабатывающий агрегат по п. 6, в котором указанное положение взаимодействующих с землей инструментов регулируется путем смещения глубины, на которую взаимодействующие с землей инструменты заглубляются в землю.
8. Почвообрабатывающий агрегат по п. 6, в котором указанное положение взаимодействующих с землей инструментов регулируется путем изменения угла группы взаимодействующих с землей инструментов.
9. Почвообрабатывающий агрегат по п. 1, в котором указанный контроллер выполнен с возможностью отображения параметров состояния почвы для оператора почвообрабатывающего агрегата.
10. Почвообрабатывающий агрегат по п. 1, в котором указанный контроллер выполнен с возможностью генерирования предупреждения, когда параметры состояния почвы превышают целевые параметры.
11. Почвообрабатывающий агрегат по п. 1, в котором указанный по меньшей мере один времяпролетный датчик выполнен с возможностью создания времяпролетных изображений земли после того, как почвообрабатывающий агрегат выполнил проход по земле.
12. Почвообрабатывающий агрегат по п. 1, в котором указанный контроллер выполнен с возможностью создания карт глубины на основании времяпролетных изображений.
13. Почвообрабатывающий агрегат по п. 12, в котором указанные карты глубины содержат матрицу значений глубины, соответствующих пикселям времяпролетных изображений, при этом указанная матрица может использоваться для идентификации объектов и расстояний между объектами.
14. Система обработки почвы почвообрабатывающим агрегатом по п. 1, выполненным с возможностью обработки почвы, причем почвообрабатывающий агрегат включает в себя центральную секцию, при этом указанная система управления содержит:
передний датчик, расположенный спереди центральной секции, выполненный с возможностью получения информации о высоте, указывающей высоту передней части центральной секции над землей;
задний датчик, расположенный сзади центральной секции, выполненный с возможностью получения информации о высоте, указывающей высоту задней части центральной секции над землей;
узел выравнивания, выполненный с возможностью регулировки продольной ориентации центральной секции; и
контроллер, выполненный с возможностью приема информации о высоте от переднего датчика и информации о высоте от заднего датчика, а также подачи инструкций в узел выравнивания для регулировки продольной ориентации центральной секции на основании полученной информации о высоте,
в которой указанный почвообрабатывающий агрегат дополнительно включает левую боковую секцию и правую боковую секцию,
при этом указанный почвообрабатывающий агрегат включает в себя исполнительные механизмы, соединяющие центральную секцию с каждой из боковых секций для складывания боковых секций вверх и/или вниз;
в которой каждая боковая секция включает датчик, выполненный с возможностью получения информации о высоте, указывающей высоту боковой секции над землей,
при этом указанная система управления выполнена с возможностью сравнения высоты боковых секций с высотой центральной секции, и при этом указанная система управления выполнена с возможностью предоставления инструкций исполнительным механизмам для выравнивания уровня боковых секций с уровнем боковых секций относительно центральной секции.
15. Система по п. 14, в которой каждый из указанных переднего и заднего датчиков содержит времяпролетную камеру.
16. Система по п. 14, в которой каждый из указанных переднего и заднего датчиков содержит по меньшей мере один из датчика LiDAR, радиолокационного датчика, ультразвукового датчика и гидролокационного датчика.
17. Система по п. 14, в которой указанный узел выравнивания содержит рычажный механизм продольного выравнивания.
18. Система по п. 14, в которой указанный контроллер содержит вычислительное устройство с одним или более процессорами и элементами памяти,
при этом указанный контроллер выполнен с возможностью сравнения информации о высоте от переднего датчика и информации о высоте от заднего датчика для определения фактического значения уровня центральной секции.
19. Система по п. 18, в которой указанный контроллер выполнен с возможностью приема целевого значения уровня,
при этом указанный контроллер выполнен с возможностью сравнения фактического значения уровня с целевым значением уровня,
причем указанный контроллер выполнен с возможностью регулировки продольной ориентации центральной секции, если фактическое значение уровня превышает целевое значение уровня.
20. Система по п. 14, в которой указанные исполнительные механизмы выполнены с возможностью переноса по меньшей мере части веса центральной секции к боковым секциям или от них для изменения рабочей глубины в земле взаимодействующих с землей инструментов почвообрабатывающего агрегата.
21. Система по п. 14, в которой указанная система управления выполнена с возможностью снижения давления на исполнительные механизмы, когда высота боковых секций определена как меньшая, чем высота центральной секции,
при этом указанная система управления выполнена с возможностью увеличения давления на исполнительные механизмы, когда высота боковых секций определяется как большая, чем высота центральной секции.
22. Система по п. 14, в которой указанный почвообрабатывающий агрегат дополнительно включает в себя наружную левую боковую секцию и наружную правую боковую секцию,
при этом указанный почвообрабатывающий агрегат включает в себя исполнительные механизмы, проходящие от боковых секций к наружным боковым секциям, для складывания наружных боковых секций вверх и/или вниз.
23. Система по п. 22, в которой каждая наружная боковая секция включает в себя датчик, выполненный с возможностью получения информации о высоте, указывающей высоту наружной боковой секции над землей,
при этом указанная система управления выполнена с возможностью сравнения высоты наружных боковых секций с высотой центральной секции.
24. Система по п. 23, выполненная с возможностью снижения давления на исполнительные механизмы, когда высота наружных боковых секций определена как большая, чем высота центральной секции,
при этом указанная система управления выполнена с возможностью увеличения давления на исполнительные механизмы, когда высота наружных боковых секций определена как большая, чем высота центральной секции.
25. Система по п. 14, в которой указанный почвообрабатывающий агрегат включает в себя один или более обращенных назад датчиков, выполненных с возможностью захвата изображений земли, когда почвообрабатывающий агрегат выполняет операции обработки почвы на земле,
при этом указанный контроллер выполнен с возможностью анализа изображений, полученных от датчиков, для определения фактического покрытия почвы полевыми отходами растительных материалов,
причем указанный контроллер выполнен с возможностью сравнения фактического покрытия почвы полевыми отходами с целевым покрытием почвы полевыми отходами.
26. Система по п. 25, в которой, когда фактическое покрытие почвы полевыми отходами больше целевого покрытия почвы полевыми отходами, контроллер выполнен с возможностью спуска рамы почвообрабатывающего агрегата для увеличения рабочей глубины взаимодействующих с землей инструментов почвообрабатывающего агрегата,
при этом, когда фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами, контроллер выполнен с возможностью подъема рамы почвообрабатывающего агрегата для уменьшения рабочей глубины взаимодействующих с землей инструментов почвообрабатывающего агрегата.
27. Система по п. 25, в которой, когда фактическое покрытие почвы полевыми отходами больше целевого покрытия почвы полевыми отходами, контроллер выполнен с возможностью увеличения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата,
при этом, когда фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами, контроллер выполнен с возможностью уменьшения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата.
28. Система по п. 14, включающая в себя пользовательский интерфейс для получения целевых настроек работы почвообрабатывающего агрегата,
при этом указанные целевые настройки включают в себя по меньшей мере одно из следующего: рабочей глубины взаимодействующих с землей инструментов почвообрабатывающего агрегата; покрытия почвы полевыми отходами; и угол группы взаимодействующих с землей инструментов почвообрабатывающего агрегата.
29. Система по п. 14, включающая в себя пользовательский интерфейс для получения целевых настроек работы почвообрабатывающего агрегата,
при этом указанный пользовательский интерфейс выполнен с возможностью создания карты для ввода целевых настроек, связанных с конкретными местоположениями и/или областями поля,
причем указанная карта включает в себя информацию о геолокации, полученную от системы GPS.
30. Система по п. 14, включающая в себя одну или более тепловизионных камер, выполненных с возможностью измерения температуры земли,
при этом указанные тепловизионные камеры выполнены с возможностью получения инфракрасных изображений для определения по меньшей мере одного из уровня полевых отходов на земле, качества обработки почвы после прохода почвообрабатывающего агрегата по земле и глубины обработки почвы после прохода почвообрабатывающего агрегата по земле.
31. Система по п. 14, включающая в себя одну или более тепловизионных камер, выполненных с возможностью измерения температуры земли,
при этом указанные тепловизионные камеры расположены на передней части почвообрабатывающего агрегата для получения изображений в переднем направлении и/или на задней части почвообрабатывающего агрегата для получения изображений в заднем направлении.
32. Способ обработки почвы почвообрабатывающим агрегатом по п. 1, выполненным с возможностью обработки почвы, при этом почвообрабатывающий агрегат включает в себя центральную секцию, причем указанный способ включает этапы:
(а) получения посредством переднего датчика, расположенного на передней части центральной секции, информации о высоте, указывающей высоту передней части центральной секции над землей;
(b) получения посредством заднего датчика, расположенного на задней части центральной секции, информации о высоте, указывающей высоту задней части центральной секции над землей;
(c) сравнения посредством контроллера высоты передней части центральной секции с высотой задней части центральной секции;
(d) предоставления инструкций для узла выравнивания, связанного с центральной секцией, для регулировки продольной ориентации центральной секции на основании сравнения, выполненного на этапе (c),
при этом указанный почвообрабатывающий агрегат дополнительно включает в себя левую боковую секцию, правую боковую секцию и исполнительные механизмы, проходящие от центральной секции к каждой боковой секции, при этом каждая боковая секция включает в себя датчик, выполненный с возможностью получения информации о высоте, указывающей высоту боковой секции над землей,
(e) складывания по меньшей мере одной из боковых секций вверх и/или вниз с помощью соответствующего исполнительного механизма,
(f) сравнения посредством контроллера, высоты боковых секций с высотой центральной секции, и
(g) предоставления инструкций посредством системы управления исполнительному механизму на выравнивание уровней боковых секций к уровню боковых секций относительно центральной секции.
33. Способ по п. 32, дополнительно содержащий этапы:
сравнения посредством контроллера фактического значения уровня с целевым значением уровня;
предоставления инструкций узлу выравнивания, связанному с центральной секцией, относительно регулировки продольной ориентации центральной секции, когда фактическое значение уровня превышает целевое значение уровня.
34. Способ по п. 32, согласно которому указанный этап складывания включает в себя этап передачи по меньшей мере части веса центральной секции на боковые секции или от них для изменения рабочей глубины взаимодействующих с землей инструментов почвообрабатывающего агрегата в земле.
35. Способ по п. 32, дополнительно включающий этап:
снижения давления на исполнительные механизмы, когда высоту боковых секций определяют как меньшую, чем высота центральной секции; и
увеличения давления на исполнительные механизмы, когда определено, что высота боковых секций превышает высоту центральной секции.
36. Способ по п. 32, согласно которому указанный почвообрабатывающий агрегат дополнительно включает в себя наружную левую боковую секцию, наружную правую боковую секцию и исполнительные механизмы, проходящие от боковых секций к наружным боковым секциям; и
указанный способ включает этап складывания по меньшей мере одной из наружных боковых секций вверх и/или вниз с помощью соответствующего исполнительного механизма.
37. Способ по п. 36, согласно которому указанный этап складывания включает этап передачи по меньшей мере части веса боковых секций к наружным боковым секциям или от них для изменения рабочей глубины в земле взаимодействующих с землей инструментов почвообрабатывающего агрегата.
38. Способ по п. 36, дополнительно включающий этап:
сравнения высоты наружных боковых секций с высотой центральной секции.
39. Способ по п. 38, дополнительно включающий этапы:
снижения давления на исполнительные механизмы, когда высота наружных боковых секций превышает высоту центральной секции; и
повышения давления на исполнительные механизмы, когда определено, что высота наружных боковых секций превышает высоту центральной секции.
40. Способ по п. 32, согласно которому указанный почвообрабатывающий агрегат включает в себя один или более обращенных назад датчиков, выполненных с возможностью захвата изображений земли, когда почвообрабатывающий агрегат выполняет операции обработки почвы на земле;
при этом указанный способ включает этапы: определения фактического покрытия почвы полевыми отходами растительного материала на основании изображений, полученных от датчиков; и
сравнения фактического покрытия почвы полевыми отходами с целевым покрытием почвы полевыми отходами.
41. Способ по п. 40, дополнительно включающий этапы:
спуска рамы почвообрабатывающего агрегата для увеличения глубины обработки взаимодействующих с землей инструментов почвообрабатывающего агрегата, когда фактическое покрытие почвы полевыми отходами превышает целевое покрытие почвы полевыми отходами; и
подъема рамы почвообрабатывающего агрегата для уменьшения глубины обработки взаимодействующих с землей инструментов почвообрабатывающего агрегата, когда фактическое покрытие почвы полевыми отходами меньше целевого покрытия почвы полевыми отходами.
42. Способ по п. 40, дополнительно включающий этапы:
увеличения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата, когда фактическое покрытие почвы полевыми отходами больше, чем целевое покрытие почвы полевыми отходами; и
уменьшения угла группы взаимодействующих с землей инструментов почвообрабатывающего агрегата, когда фактическое покрытие почвы полевыми отходами меньше, чем целевое покрытие почвы полевыми отходами.
43. Способ по п. 32, согласно которому указанная система управления включает в себя пользовательский интерфейс для приема целевых настроек для работы почвообрабатывающего агрегата; и
при этом указанный способ включает этап создания карты для ввода целевых настроек, связанных с конкретными местоположениями и/или областями поля,
причем указанная карта включает в себя информацию о геолокации, полученную от системы GPS.
44. Способ по п. 32, согласно которому указанная система управления включает в себя пользовательский интерфейс для приема целевых настроек результатов обработки почвы;
при этом оператор вводит целевые параметры посредством пользовательского интерфейса, причем указанные целевые параметры включают в себя по меньшей мере одно из целевой глубины, целевого уровня полевых отходов, целевой горизонтальности почвы, целевого размера комков почвы и целевого значения уровня агрегата;
причем оператор вводит ограничения для параметров агрегата посредством пользовательского интерфейса, при этом параметры агрегата включают в себя по меньшей мере одно из скорости агрегата, фактического значения уровня, фактической глубины и угла группы; и
оператор применяет значение приоритета к каждой из целевых настроек, при этом система управления выполнена с возможностью приоритизации получения результата обработки почвы с наивысшим приоритетом, когда система управления не может поддерживать все результаты обработки почвы.
| US 2017251587 A1, 07.09.2017 | |||
| US 2017112043 A1, 27.04.2017 | |||
| US 2015094917 A1, 02.04.2015 | |||
| US 2018206393 A1, 26.07.2018 | |||
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ С УСТРОЙСТВОМ ОБРАТНОГО ПРИКАТЫВАНИЯ | 2014 |
|
RU2654725C2 |
| ФУМИГАТОР ПОЧВЫ | 1996 |
|
RU2119733C1 |
| ШИРОКОЗАХВАТНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2006 |
|
RU2311010C1 |

