Область техники
Изобретение относится к космической технике, в частности к электрическим ракетным двигателям (ЭРД), использующим в качестве рабочего тела широкий круг веществ, предназначенный для установки на космических аппаратах (КА) для коррекции и поддержания их орбиты, прецизионной ориентации, проведения маневров между орбитами, разгрузки систем ориентации, увода КА с целевой орбиты в конце его срока активного существования (САС).
Уровень техники
Известен аналог – изобретение Двунаправленный волновой плазменный двигатель для космического аппарата (патент RU 2764823C1, опубликован 21.01.2022). Изобретение относится к электрическим ракетным двигателям. Изобретение включает газоразрядную камеру, антенну, ВЧ-генератор, магнитную линзу и магнитное сопло.
Недостатком является то, что в изобретении реализуется возможность создания векторов тяги только в двух направлениях, соосных с осью газоразрядной камеры. При этом, для выполнения современных космических миссий необходимы векторы тяги во множестве различных направлений, например, на что указывается в работе Shumeiko A.I. et.al. Advanced wave plasma thruster with multiple thrust vectoring capability [https://doi.org/10.2514/6.2022-2190]. Таким образом, для создания вектора тяги в необходимом направлении, двигатель, предложенный в изобретении RU 2764823C1, необходимо будет ориентировать КА дополнительными устройствами, в частности, механическими или электромагнитными устройствами контроля ориентации. Использование дополнительных устройств для ориентации направления вектора тяги приведет к увеличение массы и объема двигательной установки КА и увеличенному потреблению мощности. При этом использование данного изобретения совместно с дополнительными система ориентации для достижения возможности создания векторов тяги во множестве различных направлений ограниченно минимальным размером космического аппарата, что описано в работе Shumeiko A.I. et al. Determination of the minimum size of a small spacecraft of the cubesat standard for the possibility of using modern propulsion systems [https://doi.org/10.1063/5.0107879]. Более того, в изобретении RU2764823C1 управление направлениями истечения плазмы и векторов тяги осуществляется за счет применения магнитных линз – на фиг. 1 и 2 изобретения RU2764823C1 п. 6, - для работы которых необходимо потребление мощности, т.к. реализация таких магнитных линз на постоянных магнитах не позволит управлять направлением истечения потока плазмы, т.к. такие магнитные линзы должны быть либо включены, либо выключены. Потребление мощности для управления направлениями истечения плазмы и векторов тяги приведет к трудностям в реализации устройства, предложенного в изобретении RU 2764823 C1, для применения на борту малых космических аппаратов или к неэффективным режимам работы – повышенными удельной мощностью и удельных массы и объема на единицу тяги и удельного импульса. Более того, в изобретении RU 2764823 C1 отсутствует способность создавать прецизионные по магнитуде силы тяги.
Известен аналог – изобретение Абляционный импульсный плазменный двигатель (патент RU 2688049C1, опубликован 17.05.2019). Изобретение относится к электрическим ракетным двигателям. Изобретение включает два разрядных электрода, торцевой изолятор, диэлектрические шашки, устройство перемещения диэлектрических шашек, устройство инициирования электрического разряда.
Недостатком является то, что в изобретении реализуется возможность создания векторов тяги только в одном направлении. При этом, для выполнения современных космических миссий необходимы векторы тяги во множестве различных направлений, например, на что указывается в работе Shumeiko A.I. et al. Advanced wave plasma thruster with multiple thrust vectoring capability [https://doi.org/10.2514/6.2022-2190]. Таким образом, для создания вектора тяги в необходимом направлении, двигатель, предложенный в изобретении RU2688049C1, необходимо будет ориентировать КА дополнительными устройствами, в частности, механическими или электромагнитными устройствами контроля ориентации. Использование дополнительных устройств для ориентации направления вектора тяги приведет к увеличение массы и объема двигательной установки КА и увеличенному потреблению мощности. При этом, при необходимости выполнения сложных орбитальных маневров, требующих попеременное создание сил тяги в разных направлениях, рабочее тело будет расходоваться больше, чем был бы расход при создании вектора силы тяги в необходимом направлении без привлечения вспомогательных средств ориентации КА. При этом использование данного изобретения совместно с дополнительными система ориентации для достижения возможности создания векторов тяги во множестве различных направлений ограниченно минимальным размером космического аппарата, что описано в работе Shumeiko A.I. et al. Determination of the minimum size of a small spacecraft of the cubesat standard for the possibility of using modern propulsion systems [https://doi.org/10.1063/5.0107879]. Более того, на выходе из устройства ускоренный поток ионизированного рабочего тела будет взаимодействовать с нейтральными частицами, которые будут затормаживать ускоренный поток, тем самым ухудшая интегральные характеристики двигателя – удельные тягу и импульс на единицу мощности, а также тяговый коэффициент полезного действия (КПД).
Известен ближайший аналог (прототип) – изобретение Coaxial steady state ablation solid propellant pulse plasma thruster (патент CN 113530778 B, опубликован 02.08.2022). Изобретение относится к электрическим ракетным двигателям. Изобретение включает внутренний электрод, внешний электрод, поджигное устройство. емкостной накопитель энергии, устройство питания накопителя энергии и генератора импульсов, генератор импульсов, электромагнит.
Недостатком является то, что в изобретении реализуется возможность создания векторов тяги только в одном направлении. При этом, для выполнения современных космических миссий необходимы векторы тяги во множестве различных направлений, например, на что указывается в работе Shumeiko A.I. et al. Advanced wave plasma thruster with multiple thrust vectoring capability [https://doi.org/10.2514/6.2022-2190]. Таким образом, для создания вектора тяги в необходимом направлении, двигатель, предложенный в изобретении CN113530778B, необходимо будет ориентировать КА дополнительными устройствами, в частности, механическими или электромагнитными устройствами контроля ориентации. Использование дополнительных устройств для ориентации направления вектора тяги приведет к увеличение массы и объема двигательной установки КА и увеличенному потреблению мощности. При этом при необходимости выполнения сложных орбитальных маневров, требующих попеременное создание сил тяги в разных направлениях, рабочее тело будет расходоваться больше, чем был бы расход при создании вектора силы тяги в необходимом направлении без привлечения вспомогательных средств ориентации КА. При этом использование данного изобретения совместно с дополнительными система ориентации для достижения возможности создания векторов тяги во множестве различных направлений ограниченно минимальным размером космического аппарата, что описано в работе Shumeiko A.I. et al. Determination of the minimum size of a small spacecraft of the cubesat standard for the possibility of using modern propulsion systems [https://doi.org/10.1063/5.0107879]. Более того, на выходе из устройства ускоренный поток ионизированного рабочего тела будет взаимодействовать с нейтральными частицами, которые будут затормаживать ускоренный поток, тем самым ухудшая интегральные характеристики двигателя – удельные тягу и импульс на единицу мощности, а также тяговый коэффициент полезного действия (КПД). Более того, наличие магнитного поля, расходящегося на открытом конце коаксиального канала ьез его предварительного сужения на открытом конце коаксиального канала приведет к разлету разряда в широком диапазоне углов к оси двигателя, что приведет к ухудшению интегральных характеристик – удельных тяги и импульса на единицу мощности, а так же тягового КПД.
Раскрытие изобретения
Задачами предлагаемого изобретения являются:
- устранение недостатков аналогов и прототипа, а именно:
- расходимость потока ионизированного рабочего тела на выходе из коаксиального канала абляционного импульсного плазменного двигателя;
- однонаправленность вектора силы тяги;
- и улучшение следующих характеристик:
- уменьшение занимаемых двигателем массы и объема для выполнения коррекции и поддержания орбиты КА, его ориентации, маневров между орбитами, разгрузки систем ориентации, увода КА в конце его САС;
- увеличение эффективности использования рабочего тела;
- увеличение удельных тяги и удельного импульса двигателя на единицу потребляемой мощности.
Для решения задач и достижения технического результата предлагается коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги, содержащий:
– втулку рабочего тела;
– поджигное устройство, состоящее из соосно расположенных внутреннего и внешнего электродов поджигного устройства, при этом внутренний электрод поджигного устройства имеет цилиндрическую форму, а внешний электрод поджигного устройства имеет полую цилиндрическую форму, при этом внутренний электрод поджигного устройства расположен во внутренней полости внешнего электрода поджигного устройства без контакта внешней поверхности внутреннего электрода поджигного устройства со внутренней поверхностью внешнего электрода поджигного устройства;
– внутренний электрод, имеющий цилиндрическую форму;
– внешний электрод, имеющий полую цилиндрическую форму, который расположен соосно с внутренним электродом, при этом внутренний электрод находится во внутренней полости внешнего электрода без контакта внешней поверхности внутреннего электрода со внутренней поверхностью внешнего электрода, при этом внутренний электрод и внешний электрод образуют коаксиальный канал, имеющий открытый и закрытый концы, при этом втулка рабочего тела расположена внутри коаксиального канала, образуемого внутренним и внешним электродами, с конца, закрытого во внешнее пространство при этом поджигное устройство расположено ближе к закрытому концу коаксиального канала, при этом срез поджигного устройства расположен у поверхности втулки рабочего тела, перпендикулярной поверхности внутреннего и внешнего электродов, при этом внешний электрод поджигного устройства находится в электрическом контакте с внешним электродом;
– магнитное сопло, представляющее собой многовитковый электромагнит, расположенное за открытым концом коаксиального канала, образуемого внутренним и внешним электродами;
– отклоняющие электромагниты, жестко закрепленные на внешней поверхности магнитного сопла;
– втулку внешних электромагнитов, при этом во внутренней полости которой расположено магнитное сопло с жестко закреплёнными отклоняющими электромагнитами;
– внешние электромагниты, жестко закрепленные на внешней поверхности втулки внешних магнитов;
– устройство питания электромагнитов, имеющее линии электрической связи с магнитным соплом, отклоняющими электромагнитами и внешними электромагнитами;
– устройство питания емкостного накопителя энергии и генератора импульсов;
– емкостной накопитель энергии, имеющий линии электрической связи со внутренним и внешним электродами и устройством питания емкостного накопителя энергии и генератора импульсов;
– генератор импульсов, имеющий линии электрической связи со внутренним электродом поджигного устройства и устройства питания емкостного накопителя энергии и генератора импульсов;
– согласующее устройство, имеющее линии электрической связи с устройство питания электромагнитов и устройством питания емкостного накопителя энергии и генератора импульсов.
Коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги предлагается использовать на КА для коррекции и поддержания орбиты, прецизионной ориентации, разгрузки систем ориентации, маневров между орбитами, увода КА с целевой орбиты в конце его САС.
Перечень фигур
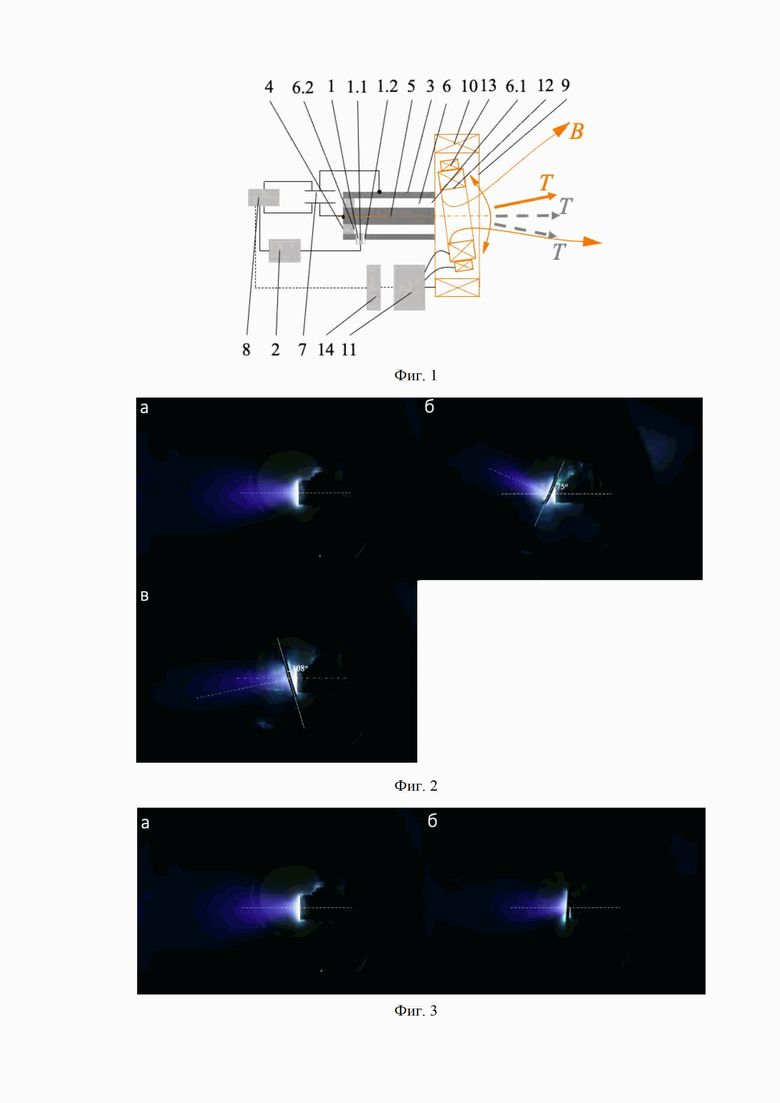
На фиг. 1 представлена конструктивная блок-схема предлагаемого коаксиального абляционного импульсного плазменного двигателя с векторизацией тяги.
На фиг. 2 представлены: а – выходной поток ионизированного рабочего тела из коаксиального абляционного импульсного плазменного двигателя с векторизацией тяги, невозмущенный магнитным полем; б, в – выходной поток ионизированного рабочего тела, возмущенный магнитным полем с линиями магнитной индукции под разными углами к оси коаксиального канала.
На фиг. 3 представлены: а – выходной поток ионизированного рабочего тела из двигателя, невозмущенный магнитным полем; б – выходной поток ионизированного рабочего тела, возмущенный магнитным полем с линиями магнитной индукции параллельными оси коаксиального канала.
Осуществление изобретения
Коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги состоит из следующих элементов с их функциями:
– поджигного устройства (1), состоящего из соосно расположенных внутреннего (1.1) и внешнего (1.2) электродов поджигного устройства, при этом внутренний электрод поджигного устройства (1.1) имеет цилиндрическую форму, а внешний электрод поджигного устройства (1.2) имеет полую цилиндрическую форму, при этом внутренний электрод поджигного устройства (1.1) расположен во внутренней полости внешнего электрода поджигного устройства (1.2) без контакта внешней поверхности внутреннего электрода поджигного устройства (1.1) со внутренней поверхностью внешнего электрода поджигного устройства (1.2), при этом внутренний электрод поджигного устройства (1.1) имеет линию электрической связи с генератором импульсов (2), при этом внешний электрод поджигного устройства (1.2) находится в электрическом контакте с внешним электродом (3), при этом находящиеся под разными потенциалами внутренний (1.1) и внешний (1.2) электроды поджигного устройства создают электрическое поле, поперечное поверхностям внутреннего (1.1) и внешнего (1.2) электродов поджигного устройства, которое приводит к образованию заряженных частиц (электронов);
– генератора импульсов (2), имеющий линии электрической связи со внутренним электродом поджигного устройства (1.1), который подает потенциал на внутренний электрод поджигного устройства (1.1), отличный от потенциала внешнего электрода поджигного устройства (1.2) и внешнего электрода (3);
– внешнего электрода (3), имеющего полую цилиндрическую форму;
– втулки рабочего тела (4), служащей в качестве рабочего тела;
– внутреннего электрода (5), имеющего цилиндрическую форму, который расположен соосно с внешним электродом (3), при этом внутренний электрод (5) находится во внутренней полости внешнего электрода (3) без контакта внешней поверхности внутреннего электрода (5) со внутренней поверхностью внешнего электрода (3), при этом внутренний электрод (5) и внешний электрод (3) образуют коаксиальный канал (6), имеющий открытый (6.1) и закрытый (6.2) концы, при этом втулка рабочего тела (4) расположена внутри коаксиального канала (6), образуемого внутренним (5) и внешним (3) электродами, с закрытого конца (6.2), при этом поджигное устройство (1) расположено ближе к закрытому концу (6.2) коаксиального канала, при этом срез поджигного устройства (1) расположен у поверхности втулки рабочего тела (4), открытой в коаксиальный канал (6), перпендикулярной поверхности внутреннего (5) и внешнего (3) электродов, при этом подача от генератора импульсов (2) потенциала ко внутреннему электроду поджигного устройства (1.1) при подаче отличного от потенциала, подаваемого генератором импульсов (2), потенциала на внешний электрод (3) и внешний электрод поджигного устройства (1.2) от емкостного накопителя энергии (7) приводит к появлению заряженных частиц (электронов) между внутренним (1.1) и внешним (1.2) электродами поджигного устройства, при этом при подаче различного потенциала от емкостного накопителя энергии (7) на внутренний (5) и внешний (3) электроды приводит к зажиганию поверхностного разряда, проходящего по поверхности втулки рабочего тела (4), открытой в коаксиальный канал (6), который зажигается между внутренним электродом (5) и внешним электродом (3), при этом поверхностный разряд приводит к испарению рабочего тела с поверхности втулки рабочего тела (4) и ионизации испаренного рабочего тела с поверхности втулки рабочего тела (4), при этом возникающая пондермоторная сила, составляемая напряженностью электрического поля, возникающей между внутренним (5) и внешним (3) в связи с разностью потенциалов между ними и азимутального магнитного поля, вследствие протекания тока через внутренний электрод (5), ускоряет ионизированное рабочее тело в направлении открытого конца (6.1) коаксиального канала (6);
– емкостного накопителя энергии (7), имеющего линии электрической связи со внутренним (5) и внешним (3) электродами, имеющего линию электрической связи с устройством питания емкостного накопителя энергии и генератора импульсов (8), при этом емкостной накопитель энергии (7) служит для накопления энергии, поступающей от устройства питания емкостного накопителя энергии и генератора импульсов (8), и ее импульсной подачи на внутренний (5) и внешний (3) электроды, при этом создавая разность потенциалов между внутренним (5) и внешним (3) электродами;
– устройства питания емкостного накопителя энергии и генератора импульсов (8), которое имеет линии электрической связи с генератором импульсов (2) и емкостным накопителем энергии (7), которое служит для электропитания генератора импульсов (2) и емкостного накопителя энергии (7);
– втулки внешних электромагнитов (9), на внешней стороне которой жестко закреплены внешние электромагниты (10);
– внешних электромагнитов (10), жестко закрепленных на внешней поверхности втулки внешних электромагнитов (9), имеющих линии электрической связи с устройством питания электромагнитов (11), при этом внешние электромагниты (10) создают магнитное поле, поперечное внешней поверхности втулки внешних магнитов (9), при этом полярность магнитного поля, создаваемого внешними электромагнитами (10) может контролироваться изменением направления электрического тока, подаваемого от устройства питания электромагнитов (11);
– устройства питания электромагнитов (11), имеющего линии электрической связи с магнитным соплом (12), отклоняющими электромагнитами (13) и внешними электромагнитами (10);
– магнитного сопла (12), представляющего собой многовитковый электромагнит, расположенного за открытым концом (6.1) коаксиального канала (6), образуемого внутренним (5) и внешним электродами (3), при этом магнитное сопло (12) создает осевое магнитное поле, которое служит для контроля направления истекания ускоренного в коаксиальном канале (6) ионизированного рабочего тела, а также для уменьшения угла его разлета;
– отклоняющих электромагнитов (13), жестко закрепленных на внешней поверхности магнитного сопла (12), создающих магнитное поле, перпендикулярное внешней поверхности магнитного сопла, при этом полярность магнитного поля, создаваемого отклоняющими электромагнитами (13) может контролироваться изменением направления электрического тока, подаваемого от устройства питания электромагнитов (11), при этом взаимодействие магнитных полей, создаваемое внешними электромагнитами (10) и отклоняющими электромагнитами (13) позволяет контролировать угол между осью магнитного сопла (12) и коаксиального канала (6), что позволяет контролировать направление истекания ускоренного в коаксиальном канале (6) ионизированного рабочего тела, что позволяет контролировать направления вектора силы тяги, создаваемой при истечении ускоренного в коаксиальном канале (6) ионизированного рабочего тела;
– согласующего устройства (14), имеющего линии электрической связи с устройством питания электромагнитов (11) и устройством питания емкостного накопителя энергии и генератора импульсов (8), которое служит для согласования импульсного образования ионизированного рабочего тела и его ускорения и выставления необходимого угла между осью магнитного сопла (12) и осью коаксиального канала (6) для получения вектора силы тяги в необходимом направлении.
Основная задача, которую выполняет коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги – это создание векторов тяги, направленных под разными углами к оси коаксиального канала (6) или соосными с осью коаксиального канала (6), для движущего управляющие воздействия на КА, т.е. для, коррекции и поддержания орбиты КА, прецизионной ориентации, разгрузки систем ориентации, маневров между орбитами, увода КА с целевой орбиты в конце его САС.
Предлагаемый коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги имеет один источник плазмы, представляющий коаксиальный канал (6), при этом на открытом конце (6.1) коаксиального канала (6) расположено магнитное сопло (12), при этом угол наклона магнитных линий, создаваемые магнитным соплом (12), к оси коаксиального канала (6) определяют направление вектора силы тяги, при этом угол наклона магнитных линий, создаваемых магнитным соплом (12), управляется при помощи изменения угла наклона оси магнитного сопла (12) к оси коаксиального канала (6) при помощи отклоняющих электромагнитов (13) и внешних электромагнитов (10). Таким образом, с помощью одного источника плазмы – коаксиального канала (6) возможно создание нескольких разнонаправленных векторов силы тяги. Способность генерировать несколько векторов силы тяги приводит к способности одного двигателя создавать управляющие воздействия в космосе на КА в нескольких направлениях, что означает, что с помощью одного двигателя можно управлять положением КА, поддерживать орбиту, выполнять маневры между орбитами, выполнять межпланетные полеты, уводить КА в конце САС без использования механических (гиродинов) и электромагнитных (магнитных катушек) устройств управления положением КА. Возможность управления вектором силы тяги, реализованная в предлагаемом двигателе, позволяет устранить такой недостаток подавляющего большинства современных электрических ракетных двигателей как однонаправленность вектора силы тяги, а также улучшить такие характеристики как эффективность использования рабочего тела и уменьшить занимаемые двигателем массу и объем на борту КА. Улучшение эффективности использования рабочего тела достигается за счет того, что имея возможность управлять направлением вектора силы тяги для выполнения коррекции положения КА или при проведении межорбитальных маневров, будет не нужно прибегать к ступенчатому проведению коррекции и маневров, т.к. вектор силы тяги будет направляться в заданном направления при помощи магнитного сопла (12). Уменьшение занимаемых двигателем массы и объема КА достигается за счет того, что для выполнения космической миссии, требующей создания движущих управляющих воздействий на КА в разных направлениях, будет возможна установка меньшего количества предлагаемых двигателей, т.к. они имеют возможность создавать векторы силы тяги в нескольких направлениях. Возможность изменения направления выхода ускоренного потока ионизированного рабочего тела из коаксиального канала (6) при помощи магнитного сопла (12) в предлагаемом коаксиальном абляционном импульсном плазменном двигателе с векторизацией тяги продемонстрирована на фиг. 2.
На фиг. 3 продемонстрирована возможность уменьшать угол расходимости выходящего потока ионизированного рабочего тела при применении магнитного сопла (12), установленного на открытом конце (6.1) коаксиального канала (6), что демонстрирует устранение такого недостатка, как расходимость потока, что в свою очередь приводит к улучшению таких характеристик, как удельные тяга и импульс на единицу потребляемой мощности, а также тяговый КПД за счет того, что ускоренный поток ионизированного рабочего тела в большей степени направляется по направлению требуемого вектора силы тяги. Это достигается за счет того, что выходящий с открытого конца (6.1) коаксиального канала (6) ускоренный поток ионизированного рабочего тела взаимодействует с магнитными линиями, создаваемыми магнитным соплом (12). Такое взаимодействие заключается в том, что линии магнитного поля, создаваемого магнитным соплом (12), направляют ионизированное частицы рабочего тела как стенки сопла Лаваля направляют нейтральные частицы потока нагретого газа. Описания эффектов взаимодействия линий магнитного поля с ионизированными частицами могут быть найдены в работах Shumeiko A.I. et al. [https://doi.org/10.3390/sym14101983], [https://doi.org/10.3390/sym15091705].
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2764487C1 |
| ДВУНАПРАВЛЕННЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2764823C1 |
| Двигатель на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите | 2018 |
|
RU2703854C1 |
| Модуль с многоканальной плазменной двигательной установкой для малого космического аппарата | 2020 |
|
RU2741401C1 |
| Ионный ракетный двигатель космического аппарата | 2018 |
|
RU2682962C1 |
| ЖИДКОСТНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ДОПОЛНИТЕЛЬНЫМ ЭЛЕКТРОМАГНИТНЫМ РАЗГОНОМ ПРОДУКТОВ СГОРАНИЯ | 2022 |
|
RU2788063C1 |
| Многоканальный плазменный двигатель с полусферической газоразрядной камерой | 2022 |
|
RU2796728C1 |
| Корректирующая двигательная установка космического аппарата | 2024 |
|
RU2830581C1 |
| ЦИКЛОТРОННЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2517004C2 |
| Способ управления движением центра масс низкоорбитального космического аппарата | 2023 |
|
RU2837207C1 |
Изобретение относится к космической технике, в частности к электрическим ракетным двигателям (ЭРД), предназначенным для установки на космических аппаратах (КА). Коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги содержит втулку рабочего тела, поджигное устройство, внутренний электрод, внешний электрод, магнитное сопло, отклоняющие электромагниты, втулку внешних электромагнитов, внешние электромагниты, устройство питания электромагнитов, устройство питания емкостного накопителя энергии и генератора импульсов; емкостный накопитель энергии, генератор импульсов, согласующее устройство. Внутренний и внешний электроды образуют коаксиальный канал, имеющий закрытый и открытый концы. С закрытого конца канала размещается втулка рабочего тела. За срезом свободного конца коаксиального канала расположено магнитное сопло, на внешней стороне которого жестко присоединены отклоняющие электромагниты. Магнитное сопло и отклоняющие электромагниты находятся во внутренней полости втулки внешних электромагнитов, которая на внешней поверхности имеет жесткое соединение с внешними электромагнитами, обеспечивающими при взаимодействии с отклоняющими магнитами возможность изменять угол наклона оси магнитного сопла к оси коаксиального канала. При реализации изобретения обеспечивается возможность управления направлением вектора силы тяги двигателя. 3 ил.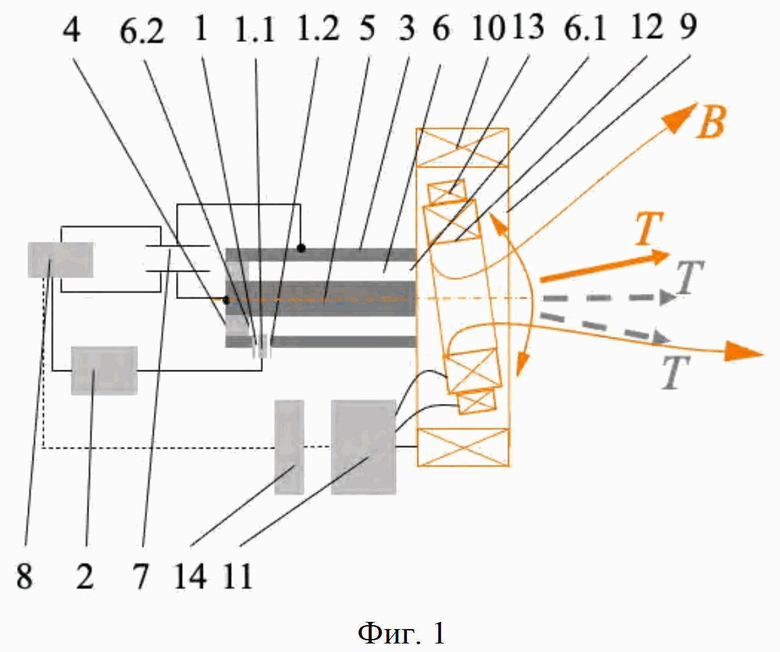
Коаксиальный абляционный импульсный плазменный двигатель с векторизацией тяги, содержащий втулку рабочего тела, внутренний электрод, внешний электрод, поджигное устройство, емкостный накопитель энергии, устройство питания накопителя энергии и генератора импульсов, генератор импульсов, отличающийся тем, что внутренний и внешний электроды образуют коаксиальный канал, имеющий закрытый и открытый концы, с закрытого конца которого размещается втулка рабочего тела, за срезом свободного конца коаксиального канала расположено магнитное сопло, на внешней стороне которого жестко присоединены отклоняющие электромагниты, обеспечивающие возможность изменять угол наклона оси магнитного сопла к оси коаксиального канала, которые имеют линию электрической связи с устройством питания электромагнитов, при этом магнитное сопло и отклоняющие электромагниты находятся во внутренней полости втулки внешних электромагнитов, которая на внешней поверхности имеет жесткое соединение с внешними электромагнитами, которые имеют линию электрической связи с устройством питания электромагнитов, которое имеет линию электрической связи с согласующим устройством, которое имеет линию электрической связи с устройством питания емкостного накопителя энергии и генератора импульсов, при этом обеспечение возможности изменения угла наклона оси магнитного сопла к оси коаксиального канала отклоняющими и внешними электромагнитами происходит за счет взаимодействия отклоняющих и внешних электромагнитов.
| CN 113530778 A, 22.10.2021 | |||
| АБЛЯЦИОННЫЙ ИМПУЛЬСНЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2688049C1 |
| АБЛЯЦИОННЫЙ ИМПУЛЬСНЫЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ | 2017 |
|
RU2664892C1 |
| ДВУНАПРАВЛЕННЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2764823C1 |

