Назначение
Изобретение относится к космической технике, в частности для управления движением центра масс низкоорбитальных космических аппаратов (КА), в том числе в нижнем диапазоне высот орбиты, в котором в качестве рабочего тела (вещества) в корректирующей двигательной установке может использоваться газообразная окружающая среда.
Уровень техники
К низкоорбитальным космическим аппаратам относят КА с высотой (расстоянием от центра Земли до КА) орбиты (траекторией движения КА вокруг Земли), находящейся в диапазоне от 160 до 2000 км. Их используют для множества целей, включая съемку Земли, спутниковую гравитационную градиентометрию, навигацию, метеорологию, спутниковую связь, проведение научных исследований и т.д.
На сегодня, наряду с эксплуатируемыми и модернизируемыми дорогостоящих КА на высоте более 500 км (например Ресурс, Канопус, Кондор, Электро, Метеор), представляющих опорную группировку КА в России, возрастает интерес к использованию группировок низкоорбитальных малых КА различного назначения на сверхнизких орбитах с высотой порядка 160-300 км, способных решать глобальные задачи по целевой работе, т.к. тенденция миниатюризации КА повлекла за собой тенденцию создания космических систем из большого числа малых КА. В качестве примера можно назвать такие системы, развертывание которых началось в конце 2010 - начале 2020-х годов, как BlackSky Global, США (60 КА в системе); Aleph-1, Аргентина (98 КА); ЛНп-1, Китай (138 КА разных типов с возможным дальнейшим увеличением); ICEYE, Финляндия (порядка 30 КА); Capella, США (36 КА); Umbra, США (24 КА); QPS-SAR, Япония, (36 КА); StriX, Япония (30 КА).
Группировки низкоорбитальных малых КА различного назначения на сверхнизких орбитах обладают рядом достоинств:
• низкой ценой выведения КА на орбиту;
• уменьшением мусора в космосе, т.к. при выходе КА из строя и при снижении его из-за атмосферного торможения он сгорает в плотных слоях атмосферы;
• повышением эффективности работы целевой аппаратуры;
• снижением технических требований к устройствам КА, в том числе из-за уменьшения радиационного излучения;
• снижением стоимости, массы, габаритов КА и т.д.
Однако при снижении высоты орбиты КА возрастает концентрация газов остаточной атмосферы Земли и связанное с этим аэродинамическое торможение аппарата, что приводит к уменьшению его срока активного существования (САС). Кроме того, существенно изменяются силы аэродинамического сопротивления КА при различных уровнях солнечной и геомагнитной активности.
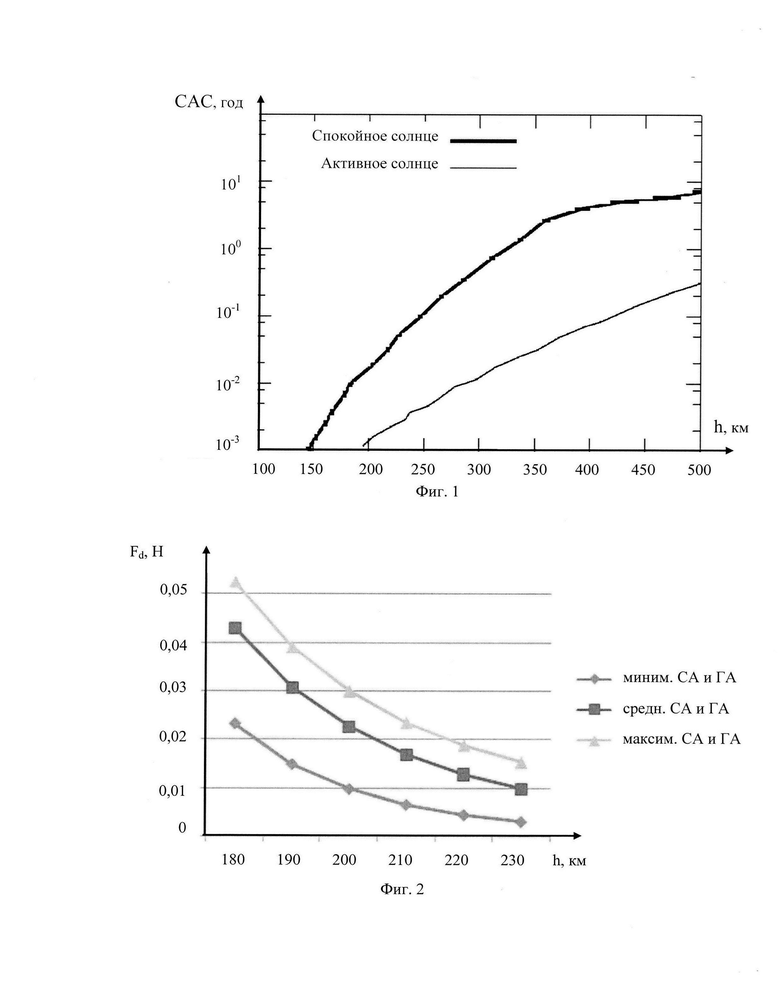
Так, например, на фиг. 1 представлена зависимость САС низкоорбитального КА от высоты орбиты (h) при отсутствии на борту двигательной корректирующей установки, а на фиг. 2 - зависимость силы аэродинамического сопротивления от высоты для КА площадью миделевого сечения 1 м2 при различных уровнях солнечной и геомагнитной активности (см., например, Гордеев С.В. "Газоразрядная камера прямоточного высокочастотного ионного двигателя". Диссертация на соискание ученой степени кандидата технических наук. «Московский авиационный институт», 2022 г., стр. 12-15). Как видно из графика, представленного на фиг. 1, срок активного существования КА без коррекции высоты орбиты незначительный, т.е. космический аппарат в результате торможения силой аэродинамического сопротивления быстро войдет в плотные слои атмосферы и сгорит.
Из графика, представленного на фиг. 2, видно, что уровни сил сопротивления имеют значительный разброс при изменении солнечной активности (СА) и геомагнитной активности (ГА).
Для движения КА по заданной траектории и проведения целевой работы на орбите требуется управление движением КА, которое включает:
• управление движением низкоорбитальных КА вокруг центра масс КА (получение нужного положения корпуса КА относительно внешних ориентиров);
• управление движением центра масс низкоорбитальных КА (получение нужной траектории движения КА);
Управлением движения низкоорбитальных КА вокруг центра масс КА обеспечивают процесс успокоения (обнуление начального кинетического момента КА при отделении КА от ракеты-носителя), затем процесс приведения (совмещение осей связанной системы координат КА с осями орбитальной системы координат) с последующей ориентацией КА, а также проведение целевой работы на орбите. Управление движением низкоорбитальных КА вокруг центра масс КА достаточно подробно описано, например, в патентах РФ №2722598, 2618664.
При управлении движением центра масс низкоорбитальных КА потребный суммарный импульс тяги корректирующей двигательной установки h определяется по формуле (см. В.П. Ходненко, А.В. Хромов. "Выбор проектных параметров системы коррекции орбиты космического аппарата дистанционного зондирования земли". ФГУП «НПП ВНИИЭМ». Вопросы электромеханики Т. 121 2011):

где mка - масса КА,
Vx.общ. - характеристическая скорость КА.
Следует отметить, что при коррекции орбиты с увеличением высоты орбиты скорость КА снижается, т.к. скорость космического аппарата (V) на орбите определяется формулой (см., например, "Высота, орбита и движение: все об искусственных спутниках". На сайте: https://saveastroworld.com/ vyisota-orbita-i-dvijenie-vs-ob-iskusstvennyih-sputnikah-975p.html/):
где G - гравитационная постоянная,
М - масса Земли,
r - радиус орбиты.
Известен "Способ спутниковой гравитационной градиентометрии" (патент РФ №2745364), в котором КА эксплуатируется в нижнем диапазоне высот (приблизительно на высоте от 230 до 260 км), и для управления движением центра масс в качестве КДУ используют ионный двигатель.
Данный способ спутниковой гравитационной градиентометрии заключается в размещении в центре масс корпуса космического аппарата вытянутой обтекаемой формы градиентометра для снижения влияния угловых ускорений, в котором на каждой оси х, у, z устанавливают по паре неподвижных линейных акселерометров с заданным расстоянием между ними, которые располагают на основании из высокостабильного усиленного материала, имеющего сотовую структуру, поддерживают стабильность температуры основания и закрепляют ее на специализированной равножесткой подвеске, при этом каждую подвижную массу в акселерометрах в невесомости удерживают электростатическим полем вблизи заданного положения и ее перемещения измеряют емкостными датчиками; с помощью двигательной установки обеспечивают равномерное движение на заданной траектории, параметры движения космического аппарата контролируют с помощью системы GPS или ГЛОНАСС и системами слежения с Земли, линейные ускорения по осям х, у, z измеряют градиентометрами, при этом положение блока датчиков угловых скоростей фиксируют с высокой точностью относительно центра масс КА; элементы конструкции космического аппарата и служебные системы устанавливают максимально приближенными к равномерному распределению их масс вокруг центра масс КА; жестко закрепляют солнечные батареи на корпусе космического аппарата, при этом космический аппарат ориентируют на заданной орбите с помощью блока датчиков угловой скорости, микроЭВМ, входящих в бесплатформенный инерциальный блок, систематические ошибки которого, вызванные погрешностями блока датчиков угловой скорости, ошибками интегрирования кинематического уравнения микроЭВМ и неточностями задания вектора угловой орбитальной скорости, компенсируют путем сравнения в устройствах коррекции ошибки с положением космического аппарата по блоку звездных датчиков, выполненного по избыточной схеме с резервированием, или датчикам ориентации, при этом используют бесплатформенный инерциальный блок, блок звездных датчиков и датчики ориентации первого типа без подвижных частей; управляют по сигналам микроЭВМ электромагнитной системой для создания необходимого крутящего момента, воздействующего на корпус космического аппарата для его управления; для описания конечного поворота космического аппарата от приборной системы координат ко второй экваториальной системе координат (инерциальной) используют математический аппарат кватернионов и параметры Родрига-Гамильтона; по нормальным и тангенциальным составляющим ускорений вектора угловой скорости вращения КА формируют сигнал коррекции линейного ускорения КА для двигательной установки; снижают погрешности определения ориентации космического аппарата относительно инерциальной системы координат за счет устранения систематической ошибки, связанной с изменением взаимного положения блока датчиков угловой скорости, блока звездных датчиков и блока акселерометров.
Выбранная форма корпуса КА в виде продольно-вытянутой обтекаемой формы снижает влияния атмосферного торможения и, как следствие, уменьшает расход рабочего тела двигательной установки. Для управления движением центра масс КА в качестве двигательной установки, компенсирующей атмосферное торможение и другие негравитационные воздействия, на КА устанавливают ионный двигатель, достоинством которого является малый расход запасаемой массы рабочего тела, в виде ксенона или криптона (см. сайт: https://ru.wikipedia.org/wiki/).
Однако запасы рабочего тела (например используемого в приведенном патенте ксенона) у ионного двигателя ввиду заданных требований по массе и габаритам КА ограничены, и продолжительность времени функционирования КА напрямую зависит от запасов рабочего тела ионного двигателя, поскольку в нижнем диапазоне высот необходимо практически постоянно компенсировать силу аэродинамического сопротивления окружающей среды корректирующей двигательной установкой, расходуя при этом рабочее тело для создания реактивной тяги двигателя.
Поэтому существенным недостатком данного способа спутниковой гравитационной градиентометрии является то, что максимальный срок активного существования КА практически определяется ограниченным запасом массы рабочего тела на борту КА. Так, например, срок активного существования широко известного КА для спутниковой гравитационной градиентометрии GOCE (Gravity Field and Steady-State Ocean Circulation Explorer) проекта Европейского космического агентства массой около 1000 кг составил около 4,5 года в связи с полным расходованием имеющихся запасов рабочего тела (ксенона) в количестве 40 кг (см. "КА GOCE". На сайте: https://ra.wikipedia.org/wiki/GOCE).
В связи с этим, а также с учетом высокой стоимости ксенона, для эксплуатации низкоорбитальных космических аппаратов в нижнем допустимом диапазоне высот орбиты представляет интерес возможность использования в качестве рабочего тела остаточных газов верхних слоев атмосферы в корректирующих прямоточных электроракетных двигателях, так как в этом случае снимается одно из ограничений для срока активного существования - ограниченный запас рабочего тела двигателя. Однако в данном случае, для гарантированного поддержания КА на заданной расчетной высоте орбиты, двигатель с его удельным импульсом должен преодолевать максимальную величину силы аэродинамического сопротивления, действующей в условиях наибольшей солнечной и геомагнитной активности.
Возможность существования космического аппарата на орбите с поддержанием орбиты с использованием прямоточного высокочастотного ионного двигателя, работающего на остаточных газах верхних слоев атмосферы, с учетом геометрических характеристик аппарата, влияющих на его торможение и на выработку электрической энергии, подтверждена и представлена в работе: Гордеев С.В., Канев С.В., Суворов М.О., Хартов С.А. "Оценка параметров прямоточного высокочастотного ионного двигателя". Труды МАИ. Выпуск №96.
По результатам исследований, проведенных Европейским космическим агентством (см. DiCara D., Gonzalez del Amo J. RAM Electric Propulsion for Low Earth Orbit Operation: an ESA study // IEPC-2007-162 30th International Electric Propulsion Conference. Florence, Italy. 2007), было установлено, что электроракетные двигатели прямоточного типа, в которых в качестве рабочего тела используют окружающую среду, целесообразно использовать на орбитах ниже 250 км, т.к. на орбитах выше 250 км они имеют низкую эффективность работы. При этом для орбит ниже 160 км наблюдается значительный рост силы аэродинамического сопротивления, и при использовании в качестве источника энергии солнечных батарей поддержание высоты орбиты КА электроракетными двигателями прямоточного типа практически неосуществимо.
Поэтому допустимый диапазон высот орбиты h космического аппарата с использованием электроракетных двигателей прямоточного типа находится в пределах от нижней высоты орбиты hн до верхней высоты орбиты hв в соответствии с условиями:
Известно изобретение "Способ создания тяги прямоточного электрореактивного двигателя и прямоточный электрореактивный двигатель" (патент РФ №2766966). Способ создания тяги прямоточного электрореактивного двигателя для поддержания малых космических аппаратов на низкой околоземной орбите осуществляют посредством ионизации газового потока и ускорения полученных при этом ионов, при этом ионизацию набегающего газового потока осуществляют до входа его в двигатель при помощи ионизирующего излучения с использованием электромагнитного с помощью лазера или изотропного излучения, направленного вперед перед двигателем по направлению полета летательного аппарата для дистанционной ионизации набегающего потока газа до его входа в двигатель. Предварительно ионизированный газовый поток поступает в двигатель без торможения, после чего осуществляют доразгон потока полученных ионов с начальной скоростью, равной скорости набегающего потока газа, а после выхода ускоренного потока из двигателя осуществляют его нейтрализацию.
Недостатками изобретения являются:
• низкая надежность корректирующей двигательной установки, т.к. удельный импульс (удельный импульс тяги) прямоточного электрореактивного двигателя в ней зависит в основном от концентрации газов внешней среды, существенно зависящей от изменяемой солнечной и геомагнитной активности;
• удельный импульс прямоточного электрореактивного двигателя рассчитывают из условий наибольшей солнечной и геомагнитной активности, что не позволяет получить его оптимальное конструктивное исполнение, прежде всего, по массе и габаритам;
• низкий уровень концентрации ионизированных частиц забортной атмосферы в устройстве ускорения ионов, т.к. ионизированные газы до входа в двигатель создают заряд на корпусе КА, поэтому с учетом ударной волны перед КА основная масса ионизированного потока частиц забортной атмосферы будет "обтекать" корпус КА, не входя в прямоточный двигатель;
• отсутствие ресивера, где идет накопление собранных ионизированных частиц забортной атмосферы и дальнейшая подача с заданным расходом, приводит к существенным колебаниям удельного импульса двигателя;
• использование лазеров в конструкции прямоточного электрореактивного двигателя увеличивает его миделевое сечение и, соответственно, увеличивает миделевое сечение корпуса космического аппарата, что приводит к дополнительному его атмосферному торможению.
Наиболее близким к предлагаемому изобретению является "Двигатель на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите" (патент РФ №2703854), взятый авторами за прототип.
В данном изобретении в малом космическом аппарате, имеющем форму цилиндра, на продольной оси располагают последовательный тракт двигателя на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите, при этом переднюю часть космического аппарата используют в качестве устройства сбора забортного воздуха для двигателя, в котором используют газоразрядную камеру с двумя отверстиями, одно из которых открыто во внешнюю атмосферу, антенну, охватывающую с внешней стороны вдоль образующей газоразрядную камеру, соединенную линией электрической связи с ВЧ-генератором, магнитную систему, охватывающую газоразрядную камеру с внешней стороны вдоль ее образующей, кроме того, между устройством сбора забортного воздуха и газоразрядной камерой располагают термостабилизирующий канал и ресивер, которые герметично соединяют между собой, термостабилизирующий канал герметично соединяют с устройством сбора забортного воздуха, а ресивер герметично соединяют с газоразрядной камерой со стороны ее отверстия, неоткрытого во внешнюю атмосферу, на линии электрической связи антенны и ВЧ-генератора располагают устройство согласования нагрузки, то есть плазмы в газоразрядной камере и антенны, и ВЧ-генератора.
Недостатками прототипа являются:
• низкая надежность корректирующей двигательной установки, т.к. удельный импульс прямоточного электрореактивного двигателя в ней зависит в основном от концентрации газов внешней среды, существенно зависящей от изменяемой солнечной и геомагнитной активности;
• удельный импульс прямоточного электрореактивного двигателя рассчитывают из условий наибольшей солнечной и геомагнитной активности, что не позволяет получить его оптимальное конструктивное исполнение, прежде всего, по массе и габаритам;
• конструктивное расширение части устройства сбора забортного воздуха (выполнен в виде горна) в прямоточном электрореактивном двигателе увеличивает его миделевое сечение и, соответственно, увеличивает миделевое сечение корпуса космического аппарата, что приводит к дополнительному его атмосферному торможению.
Целью предлагаемого способа управления движением центра масс низкоорбитального космического аппарата является повышение надежности и срока активного существования космического аппарата при обеспечении высокой эффективности его работы.
Следует отметить, что в соответствии с ГОСТ Р 56526-2015, надежность - это совокупность свойств, характеризующих способность КА обеспечивать в процессе функционирования получение заданного в техническом задании выходного эффекта при заданных условиях и режимах эксплуатации.
Раскрытие изобретения
Способ управления движением центра масс низкоорбитального космического аппарата заключается в том, что в прямоточном электрореактивном двигателе переднюю часть используют для забора газов окружающей среды, далее на продольной оси двигателя располагают термостабилизирующий канал и ресивер для прохождения газов окружающей среды в газоразрядную камеру, которую с внешней стороны вдоль ее образующей охватывают высокочастотным излучением от источника излучения высокой частоты и постоянным магнитным полем от постоянных магнитов или электромагнитов, создавая тем самым геликонный источник плазмы для обеспечения реактивной тяги двигателя.
Сущность изобретения заключается в том, что газозаборное устройство выполняют в виде сотовой конструкции, обеспечивают "основной режим" процесса ионизации в газоразрядной камере на газах окружающей среды; обеспечивают слежение за высотой орбиты космического аппарата его бортовыми устройствами и системами слежения с Земли, и при возникновении в "основном режиме" работы двигателя "критической ситуации" на высоте орбиты, приводящей к дальнейшему снижению космического аппарата в плотные слои атмосферы, переводят на "критический режим" процесса ионизации в газоразрядной камере с использованием несущественных запасов массы рабочего тела на борту космического аппарата, например, в виде ксенона; при достижении высоты КА в рабочем диапазоне высот до требуемой, переводят работу двигателя в "основной режим" работы, кроме того, для управления удельным импульсом корректирующей двигательной установки на выходе газоразрядной камеры устанавливают последовательно расположенные эмиссионный, ускоряющий и замедляющий электроды ионно-оптической системы, а на выходе двигателя за электродами обеспечивают нейтрализацию пространственного заряда ускоренного ионного потока; при этом применяют комплексное мажоритирование, резервирование, избыточность ключевых элементов системы управления движением космического аппарата.
Графические иллюстрации
Изобретение проиллюстрировано графическими фигурами: фиг. 1, фиг. 2, фиг. 3, а также рисунками фиг. 4 и фиг. 5.
На приведенной графической фигуре (фиг. 1) представлена зависимость САС низкоорбитального КА от высоты орбиты (h) при отсутствии на борту КА двигательной корректирующей установки.
На приведенной графической фигуре (фиг. 2) представлена зависимость силы аэродинамического сопротивления от высоты для КА площадью миделевого сечения 1 м2 при различных уровнях солнечной и геомагнитной активности.
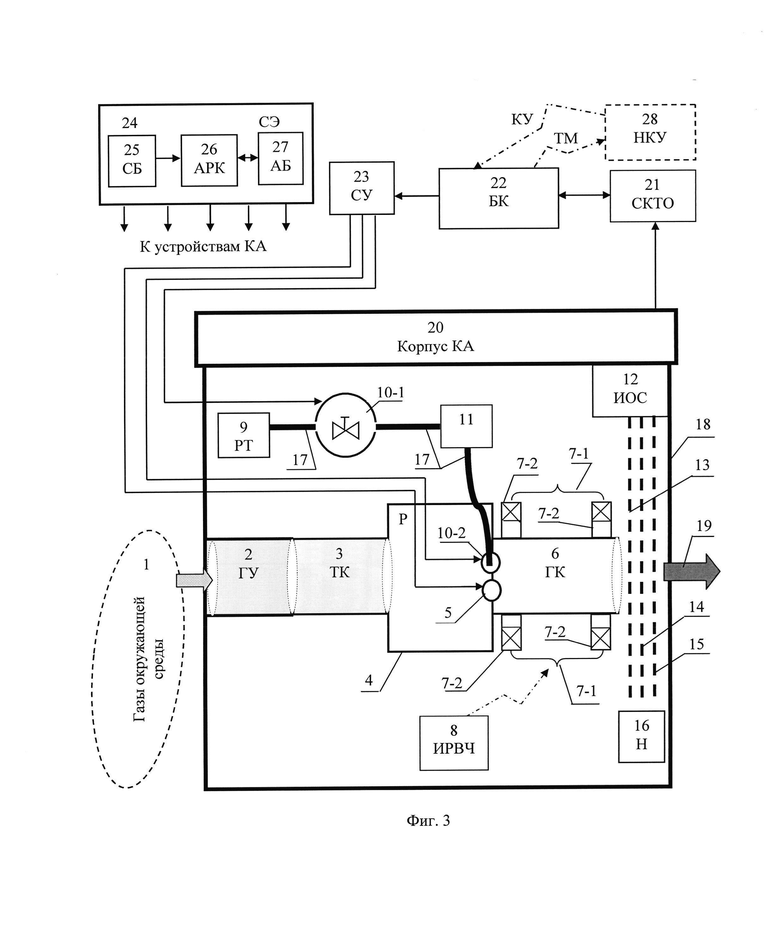
На приведенной графической фигуре (фиг. 3) приведен пример исполнения в виде структурной схемы для реализации заявляемого способа управления движением масс низкоорбитального космического аппарата, содержащей составляющие, обозначенные позициями:
• газы окружающей среды - 1;
• ГУ (газозаборное устройство) - 2;
• ТК (термостабилизирующий канал) - 3;
• Р (ресивер) - 4;
• первый газовый клапан - 5;
• ГК (газоразрядная камера) - 6;
• источник постоянного внешнего магнитного поля - 7-1;
• электромагниты или постоянные магниты - 7-2;
• ИРВЧ (источник радиоволн высокой частоты) - 8;
• рабочее тело (несущественные запасы массы в резервуаре, например, ксенона или криптона) - 9;
• второй и третий газовый клапан - соответственной 10-1 и 10-2;
• ГД (газодинамический дроссель) - 11;
• ИОС (ионно-оптическая система) - 12;
• эмиссионный электрод - 13;
• ускоряющий электрод - 14;
• замедляющий электрод - 15;
• Н (нейтрализатор) - 16;
• газопроводы - 17;
• КДУ (корректирующая двигательная установка) - 18;
• ионный поток - 19;
• корпус КА - 20;
• СКТО (система контроля текущей орбиты КА) - 21;
• БК (бортовой компьютер КА в виде микроЭВМ) - 22;
• СУ (система управления) - 23;
• СЭ (система электропитания) - 24;
• СБ (солнечная батарея) - 25;
• АРК (аппаратура регулирования и контроля) - 26;
• АБ (аккумуляторная батарея) - 27;
• НКУ (наземный комплекс управления) - 28.
Между бортовым компьютером БК 22 и устройствами (СКТО 21, СУ 23) осуществляют обмен информацией.
В современных КА обмен осуществляют по мультиплексному каналу обмена (требование ГОСТ Р 52070-2003).
По радиоканалу телеметрическая информация (ТМ) с бортового компьютера БК 22 передают в наземный комплекс управления НКУ 28, а из наземного комплекса управления НКУ 28 в бортовой компьютер БК 22 передают команды управления (КУ) в виде командно-программной информации в составе рабочих программ и разовых команд.
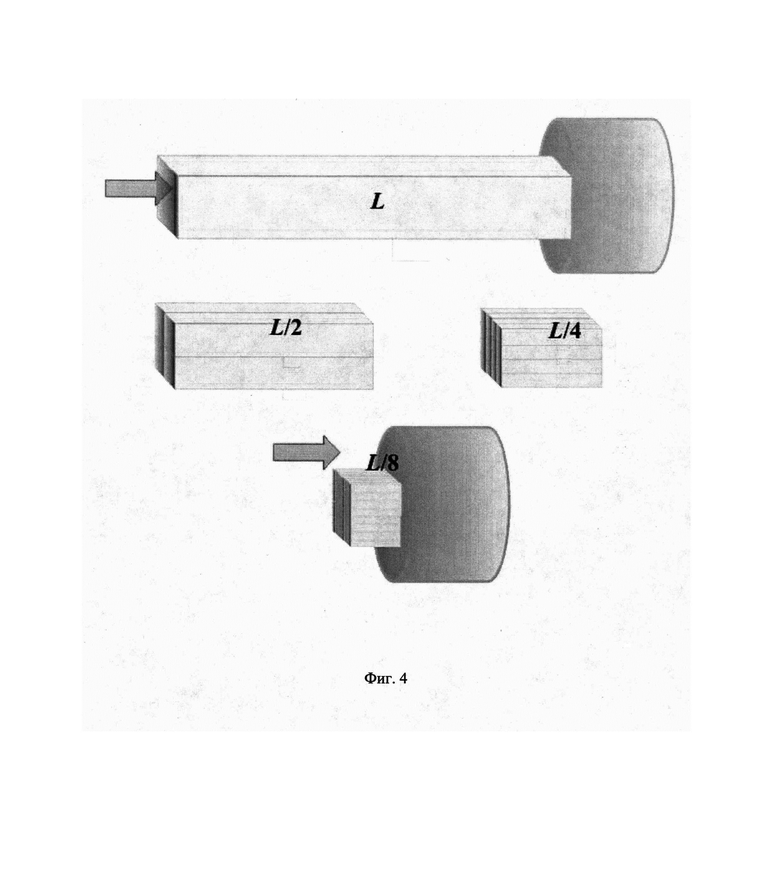
На приведенном рисунке (фиг. 4) приведен пример подобных геометрий каналов устройства забора газов.
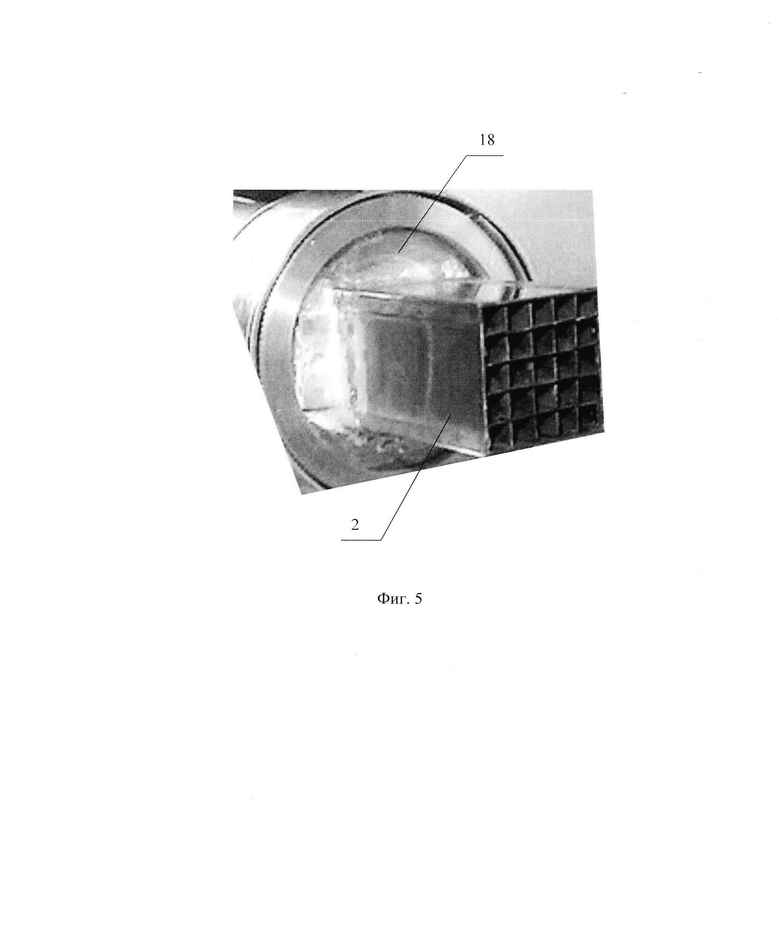
На приведенном рисунке (фиг. 5) приведен внешний вид экспериментального образца газозаборного устройства.
Описание примера исполнения
Структурная схема примера исполнения для реализации заявляемого способа управления движением центра масс низкоорбитального космического аппарата приведена на фиг. 3.
Рассмотрим управление движением центра масс низкоорбитальных КА с использованием прямоточного электроракетного двигателя, в котором в допустимом диапазоне высот в соответствии с условиями (3) в качестве рабочего тела используют газообразную окружающую среду. Как известно (см., например, Гордеев С.В. "Газоразрядная камера прямоточного высокочастотного ионного двигателя". Диссертация на соискание ученой степени кандидата технических наук. «Московский авиационный институт», 2022 г., стр. 14), в данном диапазоне высот окружающая среда состоит из различных газов, при этом наибольшую концентрацию имеют атомарный кислород и молекулярный азот, и составляет приблизительно от 1015 м-3 до 1017 м-3. Поэтому в прямоточном электроракетном двигателе КДУ 18 данные газы рассматривают в качестве потенциального рабочего тела.
Исследования ионного двигателя типа RIT-10, работающего на азоте и кислороде, подтвердили эффективность работы двигателя с использованием данных газов (см, например, Cifali G. et al. Experimental characterization of НЕТ and RIT with atmospheric propellants // Proc. Of the 32nd International Electric Propulsion Conference, Sept. 11-15, 2011, Wiestbaden. IEPC-2011-224. 12 p.).
Однако использование прямоточного электроракетного двигателя с использованием газообразной окружающей среды связано с большими рисками в эффективности его работы из-за высокой геомагнитной и солнечной активности (см. фиг. 1, фиг. 2), а также множества других факторов, например радиационного давления, вариации плотности атмосферы в разных точках Земли и прочее. Для преодоления данных критических воздействий и повышения эффективности поддержания необходимой высоты орбиты КА в предлагаемом изобретении предусмотрены несущественные запасы рабочего тела (например ксенона или криптона), которые практически не оказывают влияние на увеличение массы и габаритов корректирующей двигательной установки КДУ 18, однако позволяют оптимизировать конструктивное исполнение двигателя и существенно повысить надежность его работы. Как показали исследования Европейского космического агентства, характеристики двигателя при работе на ксеноне существенно лучше (по удельному импульсу достигают в три раза), чем при работе того же двигателя на атмосферных газах (см. Lotz В. Plasma physical and material physical aspects of the application of atmospheric gases as a propellant for Ion-Thruster of the RIT-Type // Inaugural dissertation to graduate to the doctor's degree in natural sciences at the Justus-Liebig-University of Giessen (FB-07 Physics). Giessen, Germany. 2013).
Рассмотрим процесс поддержания заданной высоты орбиты КА корректирующей двигательной установкой КДУ 18 с использованием в ней прямоточного электроракетного двигателя, в котором в основном режиме работы в качестве рабочего тела используют газообразную окружающую среду 1, при этом в "критических ситуациях" используют несущественные запасы массы рабочего тела РТ 9, например ксенона, имеющегося на борту КА (см. фиг. 3).
Принимаем допустимые рабочие высоты орбит космического аппарата hраб., находящиеся внутри диапазона высот в соответствии с условиями (3), выше нижней hн.раб., т.е.:

Примечание - "критическая ситуация" работы - при условии:

Условие допустимых рабочих высот (4), а также условие "критической ситуации" (5) записывают в ПЗУ (постоянное запоминающее устройство) микроЭВМ бортового компьютера БК 22.
В "основном режиме" работы прямоточного электроракетного двигателя при выполнении условия (4) бортовой компьютер 22 "разрешает" формирование сигналов на выходах системы управления СУ 23, которые открывают первый газовый клапан 5 для прохождения газов окружающей среды 1 в газоразрядную камеру ГК 6, при этом второй 10-1 и третий газовые клапаны 10-2 находятся в закрытом состоянии, в результате чего несущественные запасы массы рабочего тела РТ 9 (ксенона) не расходуются, т.е. не поступают в газопроводы и, соответственно, в газоразрядную камеру ГК 6.
В качестве первого 5, второго 10-1 и третьего 10-2 газоразрядных клапанов используют газовые клапаны простой и надежной конструкции в виде переключаемых клапанов, предназначенных для переключения лишь между закрытым и открытым состоянием (см., например, патент РФ №2575492).
Первый 5 и третий 10-2 клапаны располагают в центре ресивера 4, герметично соединенного с газоразрядной камерой ГК 6 симметрично относительно их центральных осей.
При движении КА газы окружающей среды 1 поступают в газозаборное устройство ГУ 2, служащее для сбора частиц газов с последующей подачей их в тракт прямоточного электроракетного двигателя. При этом следует учитывать площадь миделевого сечения газозаборного устройство ГУ 2, которое определяет не только расход рабочего тела через прямоточный электроракетный двигатель КДУ 18 (в конечном итоге удельный импульс двигателя), но также влияет и на торможение КА.
Поскольку для свободномолекулярных течений работают законы подобия, то газозаборное устройство ГУ 2 выполняют в виде сотовой конструкции (при сохранении соотношения поперечного размера и длины канала). На фиг. 4 приведен пример подобия геометрии каналов устройства забора газов. Как видно из фиг. 4, при увеличении числа каналов длина канала L уменьшается. Каждый канал пропускает направленный поток частиц и препятствует обратному выходу частиц из накопителя, так как частицы имеют равномерное распределение по направлениям скоростей и диффузно отражаются от стенок. Газозаборное устройство ГУ 2 выполняют в виде проточных каналов, которые ориентированы параллельно оси симметрии прямоточного канала двигателя, имеют форму многоугольника или круга со стороны набегающего потока газа и представляют сотовую систему. Так, например, на фиг. 5 приведен внешний вид газозаборного устройства ГУ 2, у которого соту (в сечении) выполняют в виде четырехугольника. Таким решением по исполнению газозаборного устройства ГУ 2 обеспечивают уменьшение миделевого сечения корпуса КА 20, снижают аэродинамическое сопротивление на космический аппарат, при этом обеспечивают высокую надежность и эффективность забора газов окружающей среды.
Частицы забортной атмосферы из газозаборного устройства ГУ 2 направляют по оси двигательного тракта в термостабилизирующий канал ТК 3, выполненный, например, в виде цилиндра с тонкими стенками. Концентрация частиц забортной атмосферы в конце термостабилизирующего канала ТК 3 растет, т.к. частицы в конце канала замедляются, а частицы на входе в канал еще очень быстрые. Такое повышение концентрации частиц забортной атмосферы в конце термостабилизирующего канала ТК 3 не позволяет частицам забортной атмосферы пролетать насквозь двигательный тракт, и в то же время они запираются для недопущения выхода их из двигательного тракта обратно во внешнюю атмосферу. Для уменьшения длины термостабилизирующего канала ТК 3 вдоль ее цилиндрической стенки можно использовать кольцевые отражатели (на фиг. 3 не показаны), установленные под определенным углом (см., например, патент РФ №2614906).
Следует отметить, что при соударении частиц забортной атмосферы со стенками канала термостабилизирующего ТК 3 или друг с другом они теряют и выравнивают свою энергию и почти выравниваются по скоростям.
Из термостабилизирующего канала ТК 3 частицы забортной атмосферы направляют в ресивер Р 4, где идет накопление собранных и термостабилизированных частиц газов забортной атмосферы. Ресивером обеспечивают равномерность подачи количества частиц газов заборной атмосферы в газоразрядную камеру ГК 6 независимо от изменяемой концентрации газов заборной атмосферы в течение определенного промежутка времени, тем самым способствуют поддержанию величины удельного импульса двигателя на требуемом постоянном уровне.
Ресивер Р 4 выполняют, например, в виде цилиндра с тонкими стенками с диаметром большим, чем термостабилизирующий канал ТК 3.
Газозаборное устройство ГУ 2, термостабилизирующий канал ТК 3 и ресивер Р 4 могут быть выполнены как из металла, так и из диэлектрика, хотя наиболее предпочтительным является металлический вариант исполнения.
Из ресивера Р 4 частицы забортной атмосферы через первый открытый клапан 5 поступают в газоразрядную камеру ГК 6. Проходя через первый клапан 5 (сужение канала для движения потока газа), частицы забортной атмосферы в газоразрядной камере 6 снижают скорость движения. Газоразрядную камеру ГК 6 выполняют из диэлектрического материала формой, например, в виде цилиндра, в которой частицы забортной атмосферы ионизируются и поступают к выходу двигателя через открытый выход данного цилиндра.
Процесс ионизации газов заборной атмосферы в газоразрядной камере ГК 6 осуществляют под действием волн Трайвелписа-Гоулда или косых волн Ленгмюра, а именно, под действием спирального электромагнитного поля, являющегося суперпозицией полей: постоянного внешнего магнитного, создаваемого источником постоянного внешнего магнитного поля 7-1, и электромагнитного поля, создаваемого источником радиоволн высоких частот ИРВЧ 8, расположенных снаружи корпуса газоразрядной камеры ГК 6.
Источниками постоянного внешнего магнитного поля 7-1 являются электромагниты 7-2, ток в которых обеспечивают системой электропитания СЭ 24, или постоянные магниты 7-2 в виде кольца, которые "надевают" на цилиндр газоразрядной камеры ГК 6, и располагают их возле торцов данной камеры ГК 6.
Известно, что в некомпенсированной плазме, находящейся во внешнем постоянном магнитном поле, возникает низкочастотная электромагнитная волна - геликон (см., например, "Геликон". На сайте: https://ru.wikipedia.org/wiki/).
Поэтому после ионизации молекул газов и получения плазмы в газоразрядной камере ГК 6 создаются условия для индуцирования в плазме геликонных волн (электромагнитных волн, которые возбуждаются в плазме, находящейся в магнитном поле), которые повышают концентрацию ионизированных частиц газов и, соответственно, величину удельного импульса двигателя.
На выходе газоразрядной камеры ГК 6 устанавливают последовательно расположенные перфорированные пластины-электроды (электроды могут быть сетчатыми): эмиссионный 13, ускоряющий 14 и замедляющий 15 ионно-оптической системы ИОС 12 (см., например, патенты РФ №№127511, 2766430), и обеспечивают требуемое ускорение ионов рабочего вещества, образовавшихся в разрядном объеме ГК 6, т.е. формируют требуемую величину удельного импульса двигателя.
На эмиссионный электрод 13, ускоряющий электрод 14 и замедляющий электрод 15 подают напряжения соответствующих полярностей (см., например, патент РФ №2614906) от источника электропитания 24, содержащего последовательно соединенные солнечную батарею СБ 25, аппаратуру регулирования и контроля АРК 26 и аккумуляторную батарею АБ 27 (см., например, патент РФ №2724111). Аппаратурой регулирования и контроля АРК 26 обеспечивают сопряжение в работе солнечной батареи СБ 25 и аккумуляторной батареи АБ 27, заряд и разряд АБ 27.
За электродами 13, 14, 15 ионно-оптической системы ИОС 12 устанавливают нейтрализатор Н 16, являющийся источником электронов (см., например, патент РФ №2270491), с помощью которого обеспечивают нейтрализацию пространственного заряда ускоренного выходного ионного потока 19.
Контроль за местоположением КА на орбите и вычисления с высокой точностью высоты орбиты осуществляют системой контроля текущей орбиты космического аппарата СКТО 21, в которой используют, например, измерения сигналов системы GPS и ГЛОНАСС приемниками спутниковой навигации GPS и ГЛОНАСС на борту КА (см, например: 1. С. Ревнивых "ГЛОНАСС для космических применений" // Журнал "Вестник ГЛОНАСС" №3 (19) - 2014; 2. Тучин Д.А. "Автономное определение орбиты на борту космического аппарата" // Препринты ИПМ им. М.В. Келдыша. 2019. №7). Кроме того, контроль за местоположением КА на орбите обеспечивают системами слежения с Земли (наземным комплексом управления НКУ 28).
При высокой длительной солнечной и геомагнитной активности, а также других воздействующих факторов, и возникновении "критической ситуации" в соответствии с условием (5) дальнейшее снижение КА ниже hн.раб может привести его к вхождению в плотные слои атмосферы, в которой он сгорит. Поэтому, в данной "критической ситуации" по сигналу с выхода СКТО 21 бортовой компьютер БК 22 выдает сигнал системе управления СУ 23 на закрытие первого газового клапана 5 и затем последовательное открытие третьего 10-2 и второго 10-1 газовых клапанов, т.е., таким образом, обеспечивают переход на "критический режим" работы, в котором в прямоточном электроракетном двигателе 18 в качестве рабочего тела используют несущественные запасы массы рабочего тела РТ 9 (например ксенона).
Следует отметить, что при необходимости переход на "критический режим" работы осуществляют по команде из наземного комплекса управления НКУ 28 (телеметрия и связь БК 22 с НКУ 28 описаны, например, в патенте РФ №2760818).
В "критическом режиме" работы рабочее тело РТ 9 (ксенон) из резервуара для хранения несущественной массы газа через второй открытый газовый клапан 10-1 и газодинамический дроссель ГД 11 (см., например, патент РФ №2125176), а также через третий открытый газовый клапан 10-2 поступает по газопроводам 29 в газоразрядную камеру ГК 6, тем самым обеспечивают работу космического аппарата в диапазоне рабочих высот в соответствии с условием (4).
Использованием газодинамического дросселя ГД 11 обеспечивают стабилизацию требуемого давления подачи газа в газоразрядную камеру ГК 6 при расходовании из резервуара массы рабочего тела РТ 9 (см., например, "Регуляторы давления газа прямого действия". На сайте: https://studfile.net/preview/1718131/page: 18/), в результате чего достигают оптимальные условия ионизации газа для данной используемой газоразрядной камеры ГК 6.
В "критическом режиме" работы закрытым первым газовым клапаном 5 исключают проникновение в ресивер Р 4 рабочего тела РТ 9 (ксенона) из газоразрядной камеры ГК 6, тем самым исключают дополнительное ("паразитное") расходование несущественных запасов ксенона.
Системой контроля текущей орбиты СКТО 21 постоянно отслеживают высоту орбиты КА и при достижении корпусом КА 20 заданной рабочей высоты hраб.задан. (выбирают из условия достаточности запаса отклонения ее от нижней рабочей высоты hн.раб.) в диапазоне рабочих высот в соответствии с условиями (4), бортовой компьютер 24 "разрешает" системе управления СУ 23 выдачу сигналов управления на переход работы прямоточного электроракетного двигателя в "основной режим": последовательным закрытием второго 10-1 и третьего 10-2 газовых клапанов, а затем открытием первого газового клапана 5.
Использованием двух газовых клапанов второго 10-1 и третьего 10-2 (для надежности применяют избыточность элементов) обеспечивают надежное недопущение утечки (расходования) из резервуара несущественных запасов массы рабочего тела (ксенона) РТ 9, а также недопущение проникновения рабочего тела (газов окружающей среды) из газоразрядной камеры ГК 6 в газопровод 29.
Следует отметить, что в современных космических аппаратах с целью повышения надежности и срока активного существования КА используют обоснованное комплексное и совокупное резервирование, избыточность и мажоритирование составляющих КА (см., например, патент РФ №2722598). Так, в источнике электропитания 24 (патент РФ №2724111) осуществляют резервирование аккумуляторов в аккумуляторной батарее, которые являются одним из наиболее критичных звеньев в системе электропитания, а в бортовом компьютере БК 22 в качестве микроЭВМ используют, например, 4-канальную ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
Конструктивно корпус КА 20 выполняют в виде продольно-вытянутой обтекаемой, например, восьмигранной формы, что существенно снижает влияние атмосферного торможения на КА, кроме того, плоские поверхности многогранного корпуса КА позволяют жестко закреплять на них панели солнечных батарей СБ 25 (см., например, патент РФ №2745364).
Газозаборное устройство ГУ 2 герметично соединяют с термостабилирующим каналом ТК 3, который герметично соединяют с ресивером 4, герметично соединенным с газоразрядной камерой ГК 6, при этом при соединении выхода газодинамического дросселя 11 с третьим газовым клапаном 10-2 газопроводом 29 используют герметичный его ввод в ресивер 4.
Таким образом, в предлагаемом изобретении используется неизвестная совокупность известных признаков (каждый признак по отдельности известен из открытых источников информации) и отвечает критерию "изобретательский уровень" в полной мере.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОРЕАКТИВНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2023 |
|
RU2818410C1 |
| Двигатель на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите | 2018 |
|
RU2703854C1 |
| Способ создания тяги прямоточного электрореактивного двигателя и прямоточный электрореактивный двигатель | 2020 |
|
RU2766966C1 |
| ВОЗДУХОЗАБОРНОЕ УСТРОЙСТВО КОСМИЧЕСКОГО АППАРАТА С ПРЯМОТОЧНОЙ ЭЛЕКТРОРАКЕТНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 2023 |
|
RU2834336C1 |
| ПРЯМОТОЧНЫЙ ЭЛЕКТРОРЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2016 |
|
RU2614906C1 |
| ГИБРИДНЫЙ ВОЛНОВОЙ ПЛАЗМЕННЫЙ ДВИГАТЕЛЬ ДЛЯ НИЗКООРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2764487C1 |
| Космический аппарат для очистки околоземного космического пространства от космического мусора | 2022 |
|
RU2784740C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ В КОСМОС И СИСТЕМА ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2398717C1 |
| Многоканальный плазменный двигатель с полусферической газоразрядной камерой | 2022 |
|
RU2796728C1 |
| Волновой ионный двигатель с замкнутой газоразрядной камерой | 2021 |
|
RU2771908C1 |
Изобретение относится к космической технике, в частности для управления движением центра масс низкоорбитальных космических аппаратов, в том числе в нижнем диапазоне высот орбиты, в котором в качестве рабочего тела в корректирующей двигательной установке может использоваться газообразная окружающая среда. В способе управления движением центра масс низкоорбитального космического аппарата используют прямоточный электрореактивный двигатель с геликонным источником плазмы, в котором забор газов окружающей среды обеспечивают устройством с пониженным миделевым сечением, процесс ионизации в газоразрядной камере обеспечивают как в "основном режиме" на газах окружающей среды, так и в "критическом режиме" с использованием несущественных запасов массы рабочего тела на борту космического аппарата, например, в виде ксенона (или криптона), при этом на выходе для управления тягой космического аппарата используют ионно-оптическую систему, а также обеспечивают нейтрализацию пространственного заряда ускоренного ионного потока. Технический результат - повышение надежности и срока активного существования космического аппарата при обеспечении высокой эффективности его работы. 5 ил.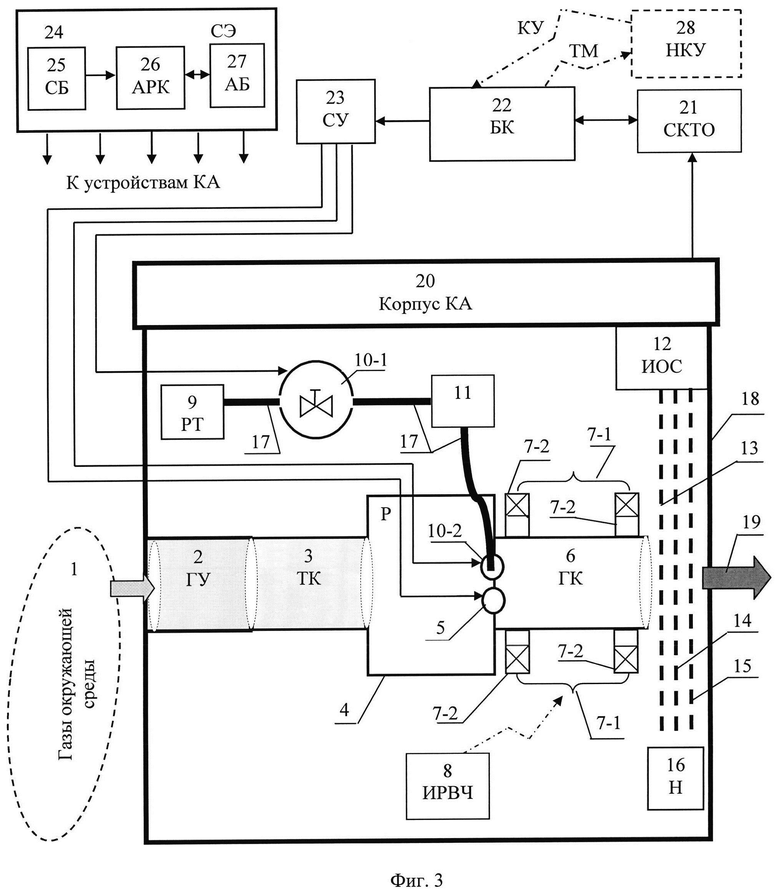
Способ управления движением центра масс низкоорбитального космического аппарата, заключающийся в том, что в прямоточном электрореактивном двигателе переднюю часть используют для забора газов окружающей среды, далее на продольной оси двигателя располагают термостабилизирующий канал и ресивер для прохождения газов окружающей среды в газоразрядную камеру, которую с внешней стороны вдоль ее образующей охватывают высокочастотным излучением от источника излучения высокой частоты и постоянным магнитным полем от постоянных магнитов или электромагнитов, создавая тем самым геликонный источник плазмы для обеспечения реактивной тяги двигателя, отличающийся тем, что газозаборное устройство выполняют в виде сотовой конструкции, при этом обеспечивают слежение за высотой орбиты бортовыми устройствами и системами слежения с Земли, обеспечивают нахождение космического аппарата в диапазоне эффективного использования газов окружающей среды, а именно в диапазоне высот орбит от нижнего значения 160 км до верхнего значения 250 км, при этом в данном диапазоне задают нижнюю и верхнюю рабочие высоты орбиты и записывают их в постоянное запоминающее устройство бортового компьютера, в центре ресивера, в месте его симметричного соединения с газовой камерой симметрично относительно их центральных осей, располагают два газовых клапана, первый из которых при открытии обеспечивает поступление в газовую камеру частиц заборной атмосферы, а второй подачу в газоразрядную камеру из резервуара для хранения через третий открытый газовый клапан и газодинамический дроссель запасов рабочего тела, при этом в диапазоне от задаваемой нижней рабочей высоты орбиты до крайнего верхнего значения высоты орбиты процесс ионизации в газоразрядной камере двигателя осуществляют в "основном режиме", только с использованием газов окружающей среды, для чего по сигналу бортового компьютера открывают первый газовый клапан, в "критических ситуациях", а именно при достижении заданного значения нижней рабочей высоты орбиты, обеспечивают "критический режим" процесса ионизации в газоразрядной камере двигателя, при котором бортовой компьютер выдает сигнал на закрытие первого газового клапана, а затем на последовательное открытие третьего и второго газовых клапанов, вследствие чего осуществляется ионизация только запасенного рабочего тела, имеющегося на борту космического аппарата, затем, при возвращении космического аппарата до заданного значения верхней рабочей высоты орбиты, работу двигателя переводят снова в "основной режим"; кроме того, для управления удельным импульсом тяги корректирующей двигательной установки на выходе газоразрядной камеры двигателя устанавливают последовательно расположенные эмиссионный, ускоряющий и замедляющий электроды ионно-оптической системы, а на выходе корректирующей двигательной установки за электродами обеспечивают нейтрализацию пространственного заряда ускоренного ионного потока; при этом применяют комплексное мажоритирование, резервирование, избыточность ключевых элементов системы управления движением космического аппарата.
| Двигатель на забортном воздухе с геликонным источником плазмы для поддержания малых космических аппаратов на низкой околоземной орбите | 2018 |
|
RU2703854C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2601690C2 |
| WO 2013174208 A1, 28.11.2013. | |||

