Заявляемое изобретение относится к области сельскохозяйственного машиностроения, а именно к почвообрабатывающим орудиям с пассивными рабочими органами, и может быть использовано в сельском хозяйстве для предпосевного и послепосевного прикатывания почвы, для разбивки комков, для разрыхления верхнего и уплотнения подповерхностных слоев почвы, а также для нарушения корки почвы и частичного выравнивания поверхности взрыхленного поля.
Известно почвообрабатывающее орудие, включающее раму с прицепом, опирающуюся в задней части на два пневмоколеса, на которых с возможностью перевода гидроцилиндрами из горизонтального рабочего положения в вертикальное транспортное положение смонтирована поворотная рама с крыльями, на крыльях в шахматном порядке с перекрытиями по фронту закреплены прикатывающие секции, состоящих из рамок, на которых в подшипниковых узлах установлены батареи, включающие вал, колеса с неровной поверхностью и зубовые диски, установленные на них посредством подпружиненных горизонтально продольных осей, крылья на поворотной раме установлены подвижно с возможностью поворота гидроцилиндрами вперед, до фиксации на раме с прицепом, в транспортное положение. - (каток кольчато-зубчатый Булава К3-12,4. руководство по КЗ эксплуатации, ООО «ТС Инжиниринг», г. Воронеж).
Недостатком вышеуказанного агрегата является то, что поворотная рама с крыльями, на которых в шахматном порядке с перекрытием установлены рабочие секции, после перевода их из горизонтального рабочего положения в вертикальное транспортное положение поворачиваются вперед и фиксируются на раме с прицепом для последующего транспортирования. Такой способ перевозки из-за большого веса поворотной рамы с крыльями и рабочих органов требует наличия в агрегате мощной тяжелой рамы с прицепом и усиленных транспортных колес. Это резко увеличивает вес агрегата и, как результат, снижает его маневренность и увеличивает нагрузку на заднюю ось колес трактора, а также складывание крыльев агрегата вперед ограничивает возможность увеличения его рабочей ширины захвата или, при ее значительном увеличении, приводит к резкому росту веса агрегата, что является крайне нежелательным.
К недостаткам агрегата следует также отнести и то, что секции на поворотной раме и крыльях, закрепленные на них посредством горизонтально-продольных осей, позволяют, в процессе работы, копировать поверхность обрабатываемого поля только в поперечной плоскости, в продольной же плоскости копирование поверхности обрабатываемого поля рабочими секциями в отдельности невозможно, что приводит к наличию на поверхности обработанного поля участков с не прикатанной почвой.
Наиболее близким к предлагаемому изобретению является широкозахватный почвообрабатывающий агрегат, принятый за прототип, включающий раму с прицепом, опирающуюся в задней части на пневматические колеса, средний поворотный брус, установленный подвижно в задней части рамы с прицепом и соединенный с ней так же подвижно гидроцилиндрами для поворота из горизонтального рабочего положения в вертикальное транспортное положение, по торцам среднего поворотного бруса шарнирно, на крестовинах установлены крылья, на которых по фронту, посредством подпружиненных горизонтально-продольных осей закреплены подвижно рабочие секции, состоящие из рамок, в подшипниковых узлах, которых на валах смонтированы рабочие органы, крылья оснащены упорами, ограничивающими в транспортном положении поворот крыльев от схождения. На торцах крыльев установлены технологические колеса, а на передних их стенках смонтированы транспортные колеса, крайние концы соединены с передней частью рамы с прицепом растяжками, которые состоят из 2-х частей, передних - коротких с уловителями и защелками с пальцами и пружинами, соединенных через компенсационные пружины тросиками со средним поворотным брусом, и задних - длинных, одни концы которых соединены подвижно с П-образными поводками, установленными подвижно на раме с прицепом. Другие концы подвижно закреплены на концах крыльев через кронштейны. Рабочие секции на крыльях установлены посредством поводков, на которых они смонтированы подвижно на подпружиненных горизонтально-продольных осях. Поводки на крыльях установлены в рамках посредством осей, а рамки на крыльях закреплены хомутами. В рамках под поводками смонтированы под углом друг к другу две ограничительные пластины, причем вершины их углов расположены под центрами горизонтально-продольных осей, на которых поводки установлены в рамках. При этом передние ограничительные пластины ограничивают поворот поводков с рабочими секциями в процессе работы вверх, а задние ограничительные платины вниз. На одних из боковых стеной рамок, посредством которых поводки установлены на крыльях, смонтированы неподвижно втулки, в которых установлены пальцы-фиксаторы поводков в транспортном положении. При этом в пальцах-фиксаторах имеются по два отверстия, посредством которых они фиксируются пружинными шплинтами в транспортном или в рабочем положениях, рабочие секции, установленные на среднем поворотном брусе, смонтированы на нем посредством общей рамы, на которой они установлены путем подпружиненных горизонтально-продольных осей, а общая рама на среднем поворотном брусе установлена подвижно, через поводки, подвижность которой фиксируется гидроцилиндрами, при этом гидроцилиндры и поводки закреплены на среднем поворотном брусе посредством рамок, которые на нем крепятся стяжными хомутами, в транспортном положении общая рама с рабочими секциями фиксируется на среднем поворотном брусе пальцем-фиксатором, имеющим два отверстия, посредством которых они фиксируются в транспортном или рабочем положениях пружинным шплинтом. Средний поворотный брус при повороте вниз упирается в упоры, установленные на кронштейнах заднего бруса рамы с прицепом. На других боковых стенках рамок закреплены неподвижные втулки, в которых смонтированы механизмы полуавтоматической фиксации поводков рабочих секций при их переводе из рабочего в транспортное или из транспортного в рабочее положения, механизмы полуавтоматической фиксации поводков состоят из пальцев-фиксаторов с направляющими шпонками и пальцев с отверстием так же с направляющими шпонками, фиксирующими их положение в пазах неподвижных втулок, которые соединены между собой пружинами, пальцы с отверстиями и направляющими шпонками через подвижные тонкие пальцы соединены неподвижно с головками, надетыми на неподвижные втулки, в стенках головок установлены штифты, входящие в направляющие дорожки, расположенные на внешней поверхности неподвижных втулок. Защелки с пальцами и пружинами со стороны пружин имеют фиксаторы защелок, фиксирующие посредством пальцев с канавками защелки от открытия при выполнении технологических приподыманий рабочих секций, а задних - длинных частях растяжек с вертикальными осями соединения этих частей растяжек с П-образными поводками расположены горизонтальные оси. Рабочие органы выполнены в виде сменных кольчато-шпоровых катков или сменных игольчатых дисков, установленных на рамках в подшипниковых узлах посредством двух поперечных валов в шахматном порядке последовательно через распорные втулки. (Широкозахватный почвообрабатывающий агрегат, патент RU №2630458, С1)
Недостатками данного широкозахватного почвообрабатывающего агрегата является недостаточная равномерность прикатывания рабочими секциями поверхности обрабатываемого поля расположенными на среднем поворотном брусе, а так же не прикатывание почвы за технологическими колесами, сложность конструкции из-за того, что полуавтоматические фиксаторы поводков рабочих секция установлены на всех рабочих секциях, смонтированных на крыльях агрегата, и недостаточно жесткая фиксация защелок поводков в процессе работы агрегата.
Целью изобретения является упрощение конструкции агрегата за счет того, что полуавтоматические фиксаторы поворота рабочих секций устанавливаются только на рабочих секциях, смонтированных на крыльях установленных у концов среднего поворотного бруса, а так же повышение качества копирования поверхности обрабатываемого поля за счет того, что рабочие секции на среднем поворотном брусе устанавливаются каждая посредством своих поводков и рамок с хомутами, а гидроцилиндры монтируются только на рабочих секциях, установленных по краям с среднего поворотного бруса, рабочие секции, смонтированные по краям крыльев, установлены таким образом, что они перекрывают следы технологических колес, образуемых в процессе работы агрегата, а защелки растяжек жестко фиксируются на коротких частях растяжек пальцами-фиксаторами.
Поставленная цель достигается тем, что широкозахватный почвообрабатывающий агрегат, включающий раму с прицепом, опирающуюся в задней части на пневматические колеса, средний поворотный брус установленный подвижно в задней части рамы с прицепом и соединенный с ней так же подвижно гидроцилиндрами для поворота из горизонтального рабочего положения в вертикальное транспортное, по торцам среднего поворотного бруса на крестовинах подвижно установлены крылья, на торцах которых смонтированы технологические колеса, а на передних их стенках установлены транспортные колеса, крайние концы крыльев соединены с передней частью рамы с прицепом растяжками, которые состоят из 2-х частей: передних - коротких с уловителями, защелками с пальцами и пружинами, соединенными через компенсационные пружины тросиками со средним поворотным брусом, и задних - длинных, одни концы которых соединены подвижно с П-образными поводками, установленными подвижно на раме с прицепом, другие концы подвижно закреплены на концах крыльев через кронштейны, рабочие секции, состоящие из рамок, в подшипниковых узлах которых на волах смонтированы рабочие органы в виде сменных кольчато-шпоровых катков или сменных игольчатых дисков установлены на крыльях по фронту посредством поводков, на которых они смонтированы подвижно на подпружиненных горизонтально-продольных осях, поводки на крыльях смонтированы в рамках посредством осей, а рамки на крыльях закреплены хомутами, в рамках под поводками смонтированы под углом друг к другу две ограничительные пластины, причем вершины их углов расположены под центром осей, на которых подвижно установлены в рамках поводки, при этом передние ограничительные пластины ограничивают поворот поводков с рабочими секциями в процессе работы вверх, а задние ограничительные пластины - вниз, на одних из боковых стенок рамок, посредством которых поводки установленные на крыльях, смонтированы неподвижно втулки, в которых установлены пальцы-фиксаторы поводков в транспортном положении, при этом в пальцах-фиксаторах имеются по два отверстия, посредством которых они фиксируются пружинными шплинтами в транспортном или в рабочем положениях, на других боковых стенках рамок закреплены неподвижно втулки, в которых смонтированы механизмы полуавтоматической фиксации поводков рабочих секций при их переводе из рабочего в транспортное или из транспортного в рабочее положение, механизмы полуавтоматической фиксации поводков состоят из пальцев-фиксаторов с направляющими шпонками и пальцами с отверстиями также с направляющими шпонками, фиксирующими их положения в пазах неподвижных втулок, которые соединены между собой пружинами, пальцы с отверстиями и направляющими шпонками через подвижные пальцы соединены неподвижно с головками, надетыми на неподвижные втулки, в стенках которых установлены штифты, входящие в направляющие дорожки, расположенные на внешней поверхности неподвижных втулок, отличающиеся тем, что рабочие секции с подпружиненными горизонтально-продольными осями на среднем поворотном брусе установлены подвижно каждая посредством своих поводков, которые на осях смонтированы в рамках закрепленных на среднем поворотном брусе стяжными хомутами, причем подвижность рабочих секций установленных по краям среднего поворотного бруса ограничивается гидроцилиндрами, а подвижность других рабочих секций ограничительными пластинами, установленными под углом друг к другу в их рамках, причем вершины этих углов расположены под центрами осей, на которых они подвижно установлены, при этом все рабочие секции на среднем поворотном брусе фиксируется пальцами-фиксаторами, имеющими два отверстия, посредством которых они устанавливаются в транспортном или рабочем положениях пружинными шплинтами, механизмы полуавтоматической фиксации поводков рабочих секций устанавливаются только на рамках рабочих секций смонтированных на крыльях и расположенных у концов среднего поворотного бруса агрегата, а защелки оснащены втулками, посредством которых они фиксируются при работе агрегата пальцами-фиксаторами на передних - коротких частях растяжек, рабочие секции, смонтированные у внешних концов крыльев, установлены на них так, что при работе агрегата они перекрывают следы оставляемые рабочими колесами.
Указанные отличия являются существенными, так как установка рабочих секций на среднем поворотном брусе, каждой отдельно на своих поводках с рамками и хомутами, а также установка рабочих секций расположенных у внешних концов крыльев таким образом, что они позволяют при работе агрегата перекрывать следы оставляемые рабочими колесами, позволяет существенно улучшить копирование прикатываемых поверхностей обрабатываемых полей, что значительно повышает равномерность (одновременность) всходов посевов.
Установка механизмов полуавтоматической фиксации поводков рабочих секций только на 2-х, причем расположенных у концов среднего поворотного бруса существенно упрощает конструкцию агрегата в целом и значительно снижает его себестоимость, а оснащение защелок втулками, посредством которых пальцами-фиксаторами они фиксируются неподвижно на передних-коротких частях растяжек исключает возможность их открытия при технологических подъемах и опусканиях рабочих органов.
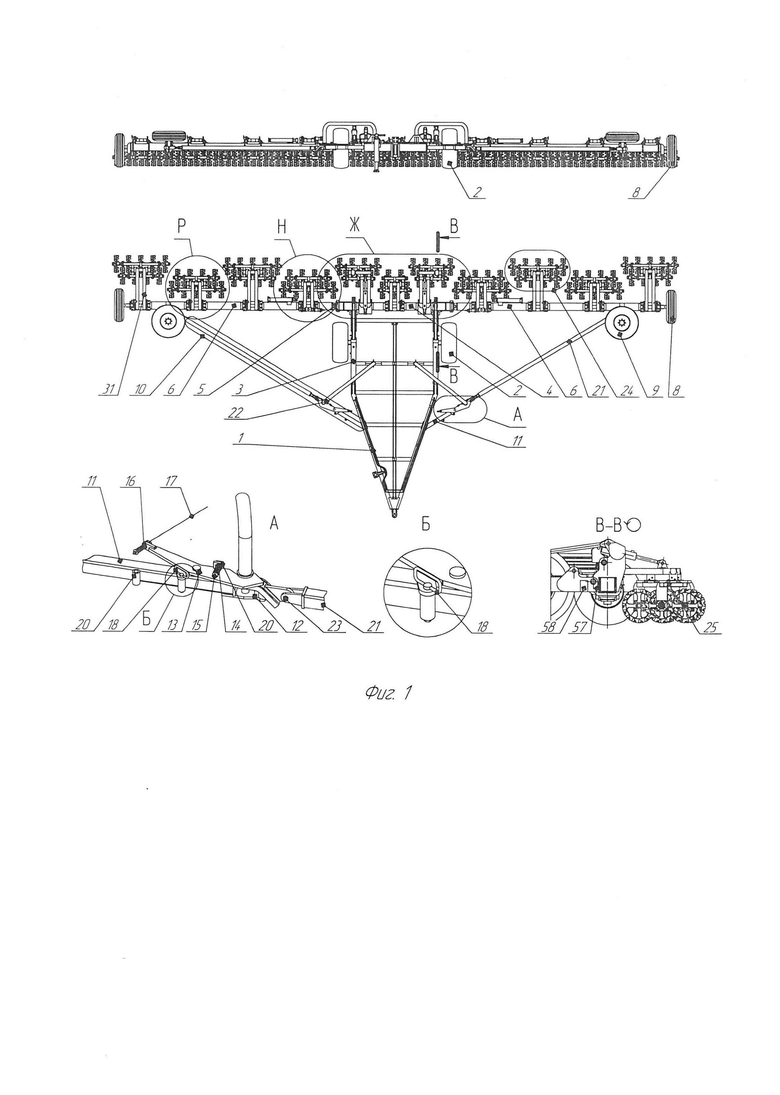
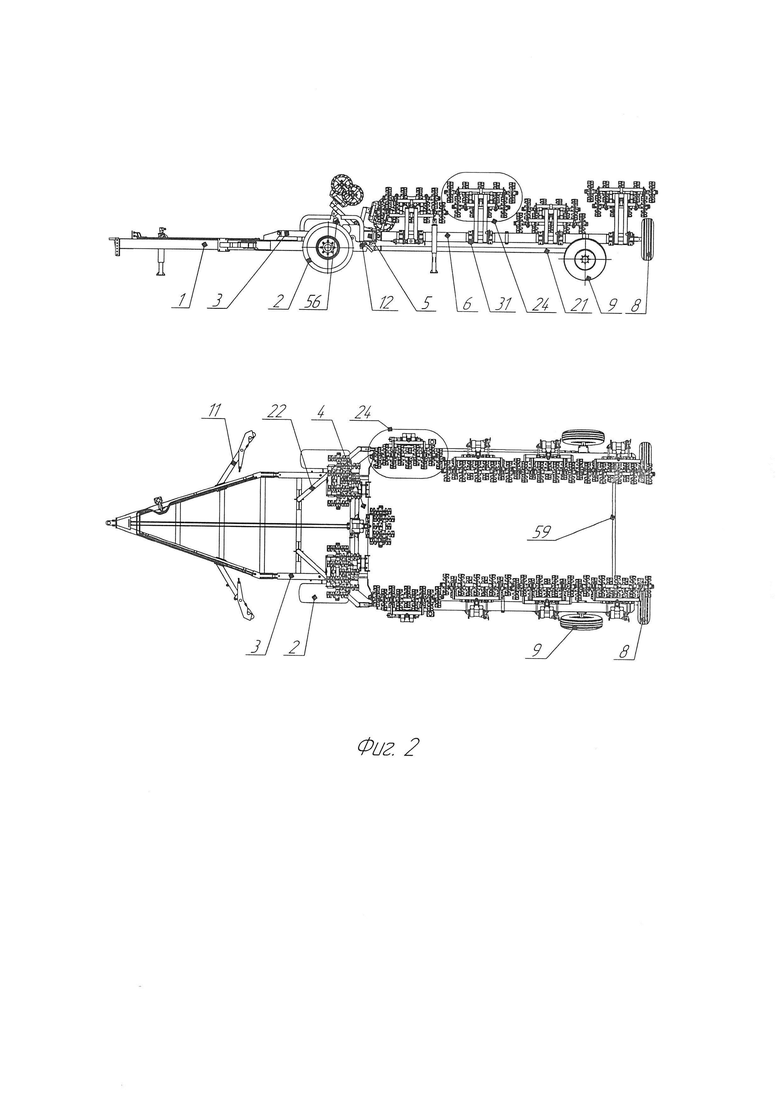
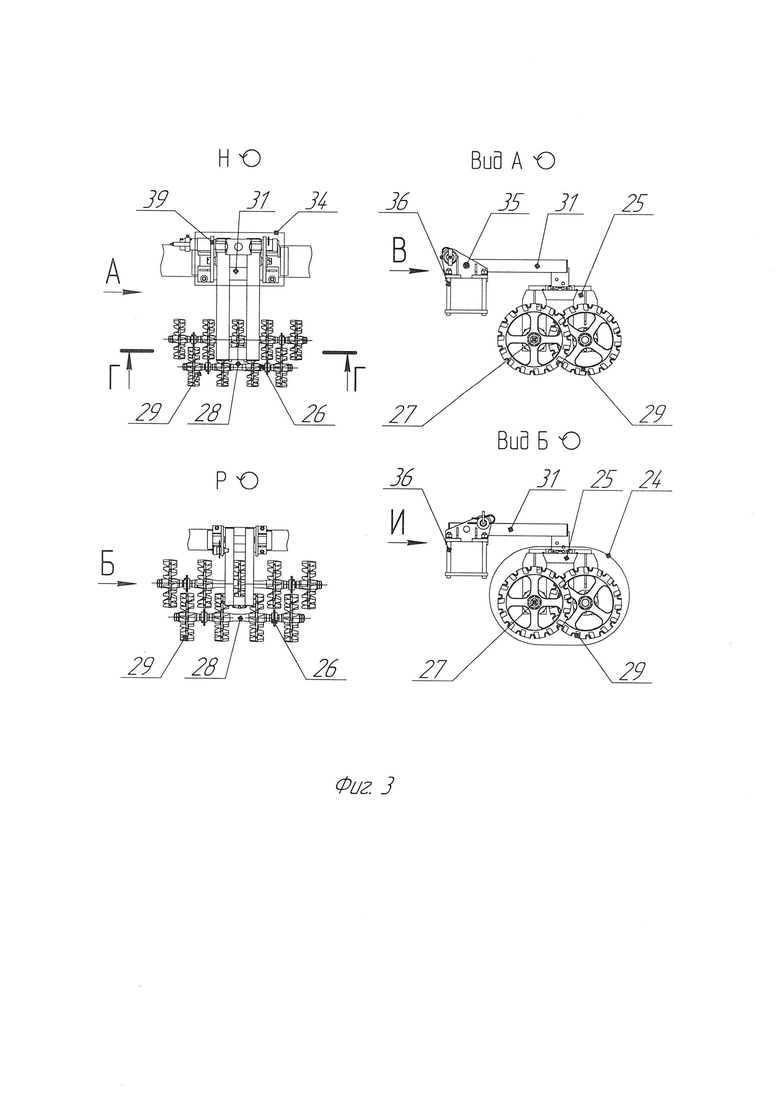
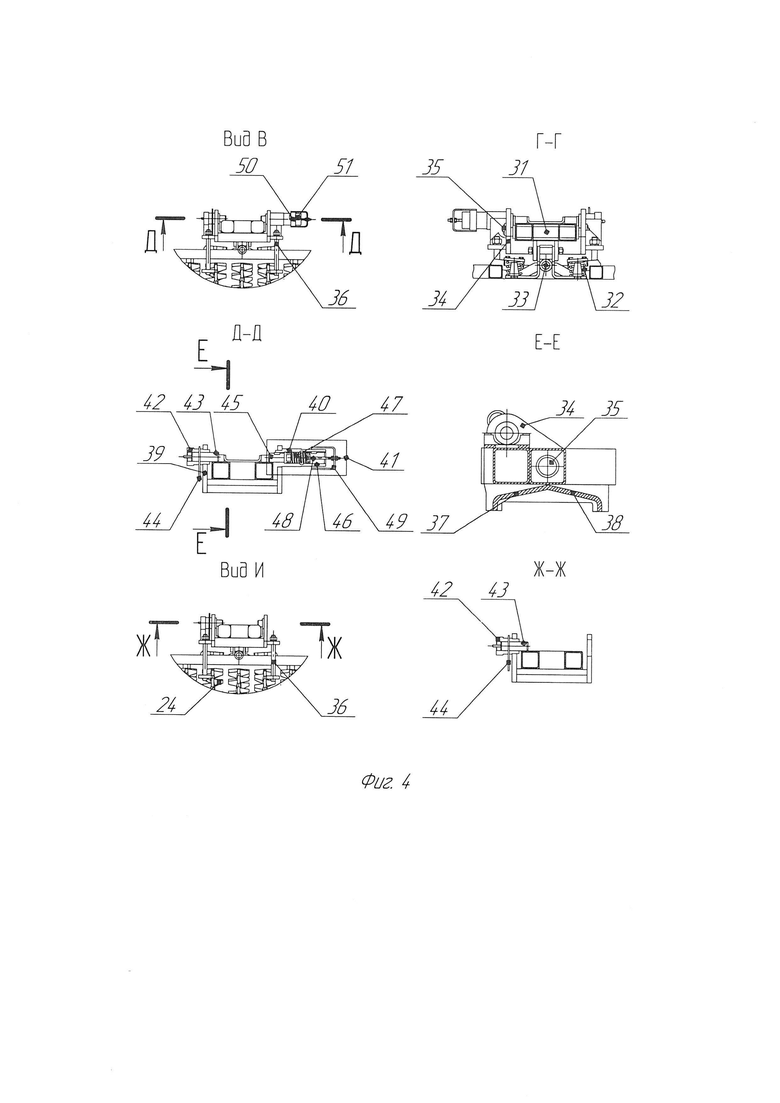
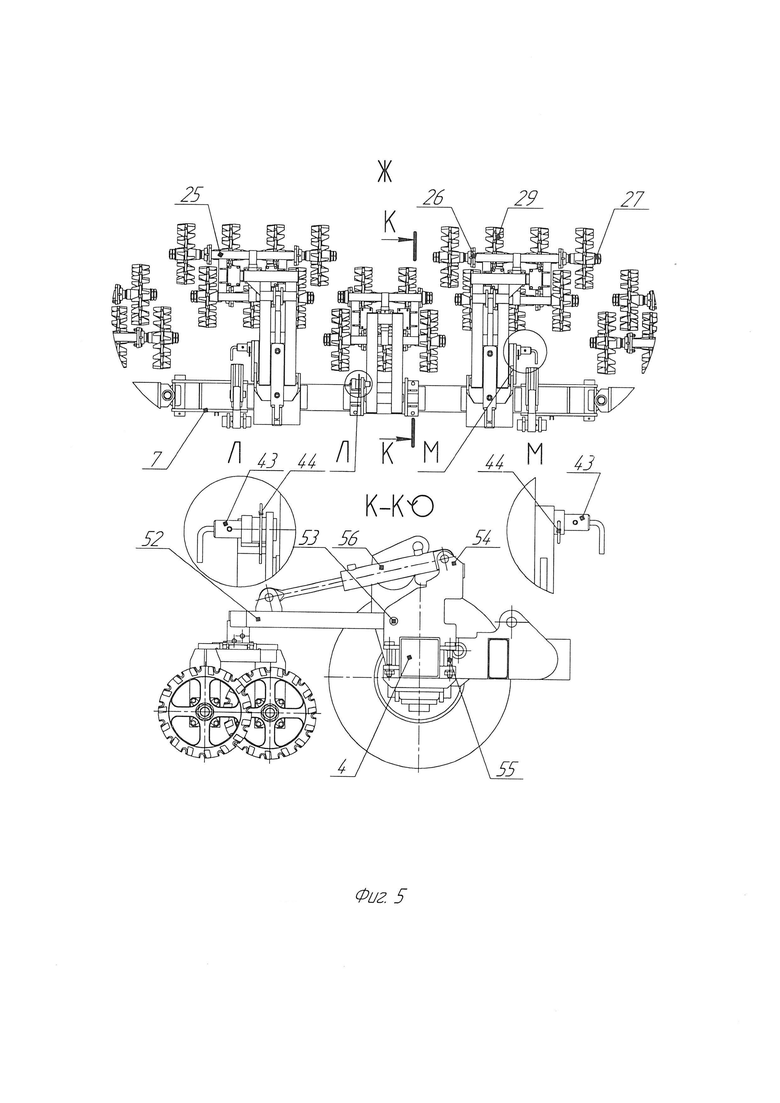
Сущность изобретения поясняется чертежами. На фиг. 1 показан широкозахватный почвообрабатывающий агрегат в рабочем положении, вид сверху и спереди. На фиг. 2 показано то же в транспортном положении, вид сверху и сбоку. На фиг. З показаны рабочие секции. На фиг. 4 показан поводок с механизмом подпружинивания, горизонтально-продольной оси установки рабочей секции на поводке, а также разрез механизма полуавтоматической фиксации рабочих секций. На фиг. 5 показана установка рабочих секций на среднем поворотном брусе, вид сверху и сбоку.
Широкозахватный почвообрабатывающий агрегат содержит раму с прицепом 1 опирающуюся в задней части на два пневмоколеса 2, на которой с возможностью перевода гидроцилиндрами 3 из горизонтального рабочего положения в вертикальное транспортное положение смонтирован средний поворотный брус 4, по торцам которого на крестовинах 5 установлены боковые поворотные крылья 6, причем крестовины оснащены упорами 7, ограничивающими поворот боковых поворотных крыльев 6 внутрь в транспортном положении. По торцам боковых поворотных крыльев 6 установлены технологические (рабочие) колеса 8, а на передних их стенках смонтированы транспортные колеса 9.Крайние концы боковых поворотных крыльев 6 соединены с передней частью рамы с прицепом 1 растяжками 10, которые состоят из 2-х частей, передних - коротких 11, на которых смонтированы уловители 12, защелки 13 с пружинами 14 и пальцы 15, соединенных через компенсационные пружины 16 и тросики 17 со средним поворотным брусом 4, защелки 13 при выполнении технологических операций фиксируются от открытия пальцами фиксаторами 18, которые в транспортном положении устанавливаются в гнезде 20, закрепленных на передних -коротких поводках 11 и задних- длинных 21, одни концы которых соединены подвижно с П-образными поводками 22, установленными подвижно на раме с прицепом 1, другие их концы подвижно закреплены на концах боковых поворотных крыльев 6, в задних - длинных частях 21 растяжек 10, рядом с вертикальными осями соединения этих частей растяжек с П-образными поводками 22 расположены горизонтальные оси 23. Рабочие секции 24 состоят из рамок 25 с подшипниковыми узлами 26, в которых установлены по два поперечных вала 27. На поперечных валах 27 в шахматном порядке, последовательно через распорные втулки 28 смонтированы кольчато-шпоровые катки 29, рабочие секции 24 на боковых поворотных крыльях 6 установлены посредством поводков 31, на которых они закреплены подвижно через подпружиненные пружинами 32 горизонтально-продольными осями 33. Поводки 31 на боковых поворотных крыльях 6 смонтированы через рамки 34, в которых они установлены посредством осей 35, а рамки 34 на боковых поворотных крыльях 6 закреплены хомутами 36, в рамках 34 под поводками 31 под углом друг к другу расположены две ограничительные пластины 37 и 38, причем вершины их углов расположены под центрами горизонтально-продольных осей 35, при этом передние пластины 37 ограничивают повороты поводков 31 с рабочими секциями 24 вверх, а задние пластины 38 ограничивают поворот поводков 31 с рабочими секциями 24 вниз, чем ограничивается высота подъема рабочих секций вверх и их опускание вниз. На одних из боковых стеной 39 рамок 34 установки поводков 31 на боковых поворотных крыльях 6 смонтированных у концов среднего поворотного бруса 4 установлены неподвижно втулки 40, в которые монтируются механизмы полуавтоматической фиксации 41 поводков 31 с рабочими секциями 24 при их переводе из рабочего в транспортное положение. На других боковых стенках 39 этих и всех других рамок 34, также неподвижно, смонтированы втулки 42, в которых установлены пальцы-фиксаторы 43 поводков 31 и 52, с пружинными шплинтами 44, фиксирующими эти пальцы-фиксаторы 43 в транспортом или в рабочем положении, механизмы полуавтоматической фиксации 41 поводков 31 с рабочими секциями 24 состоят из пальцев-фиксаторов с направляющей шпонкой 45 и пальцев с отверстиями и направляющей шпонкой 46, соединенных между собой пружинами 47, пальцы с отверстиями и направляющими шпонками 46 посредством подвижных пальцев 48 соединены неподвижно с головками 49, выполненных в виде стаканов, в стенках которых установлены штифты 50, входящие в направляющие дорожки 51, расположенные на внешней поверхности неподвижных втулок 40 механизмов полуавтоматической фиксации 41. Рабочие секции 24, установленные на среднем поворотном брусе 4 смонтированы на нем через подпружиненные пружинами 32 горизонтально-продольные оси 33, в поводках 52, закрепленных осями 53 в рамках 54 установленных на среднем поворотном брусе 4 хомутами 55, подвижность рабочих секций 24 установленных по краям среднего поворотного бруса 4 ограничивается гидроцилиндрами 56. В транспортном положении фиксируются аналогично фиксации рабочих секций 24 на крыльях 6.Поворот среднего поворотного бруса 4 гидроцилиндрами 3 в нижнем положении ограничивается упорами 57, которые смонтированы на заднем брусе 58 рамы с прицепом 1. Боковые поворотные крылья 6 с рабочими секциями 24 в транспортном положении соединены транспортным тросом 59.
Широкозахватный почвообрабатывающий агрегат работает следующим образом. Перед началом работы агрегат в транспортном положении устанавливают на краю обрабатываемого поля и переводят из транспортного положения в рабочее, для этого снимают транспортный трос 59, после чего начинают движение агрегата назад, из-за того, что транспортные колеса 9 установлены под углом 1-2° к направлению движения, боковые поворотные крылья 6 с рабочими секциями 24 начинают раздвигаться, разворачиваясь по фронту до прямой линии, затем у всех пальцев-фиксаторов 43, фиксирующих поводки 31и 52 рабочих секций 24, смонтированных на боковых поворотных крыльях 6, и на среднем поворотном брусе 4 вынимают пружинные шплинты 44, переводят их из транспортного положения в рабочее и вновь фиксируют пружинными шплинтами 44, затем снимают пальцы-фиксаторы (не показано), отсоединяющие средний поворотный брус 4 от рамы с прицепом 1, после чего гидросистемой трактора подают масло в гидроцилиндры 3, которые поворачивают средний поворотный брус 4 с боковыми поворотными крыльями 6 до установки на почву рабочих секций 24, при этом опора боковых поворотных крыльев 6 с транспортных колес 9 переходит на рабочие колеса 8, а П-образные поводки 22 заводят концы задних - длинных частей 21 растяжек 10 в уловители 12 передних - коротких частей 11 растяжек 10, в которых они фиксируются защелками 13 с пружинами 14 установленных на пальцах 15. Защелки 13 дополнительно стопорятся пальцами-фиксаторами 18, смонтированных на передних - коротких частях растяжек 11, затем у механизмов полуавтоматической фиксации 41 поводков 31 рабочих секций 24 установленных на боковых поворотных крыльях 6, у концов среднего поворотного бруса 4 оттягивают на себя с поворотом головки 49 до установки их штифтов 50 в продольные части направляющих дорожек 51 неподвижных втулок 40, после чего продолжают оттягивать на себя головки 49 до конца продольных частей направляющих дорожек, при этом через подвижные пальцы 48 перемещаются пальцы с отверстиями с направляющими шпонками 46, которые растягивают соединенные с ними пружины 47, действующие в свою очередь на пальцы-фиксаторы с направляющей шпонкой 45, и если пальцы-фиксаторы с направляющей шпонкой 45 не зажаты поводками 31, то они входят в неподвижные втулки 40 механизма полуавтоматической фиксации 41, освобождая тем самым от фиксации поводки 31, если же пальцы-фиксаторы с направляющей шпонкой 45 зажаты поводками 31, то механизм полуавтоматической фиксации 41 будет находиться во взведенном состоянии, для того чтобы сохранить его в этом состоянии, далее поворачивают головки 49 по радиальной части направляющих дорожек 51 до упора, после чего отпускают головки 49, которые при этом штифтами 50 устанавливаются в фиксирующие углубления направляющих дорожек 51, затем вновь гидросистемой трактора подают масло в гидроцилиндры 3, которые поворачивают средний поворотный брус 4 с боковыми поворотными крыльями 6 до упора 57, после чего включают необходимую передачу трактора и начинают движение, в процессе движения рабочие секции 24 на боковых поворотных крыльях 6 будут копировать поверхность обрабатываемого поля, в процессе этого поводки 31 в какие-то моменты освободят от зажима пальцы-фиксаторы с направляющей шпонкой 45, которые при этом пружинами 47 будут втянуты в неподвижные втулки 40 механизмов полуавтоматической фиксации 41. Затем рычагами гидравлической системы трактора переводят гидроцилиндры 3 в плавающее положение, после чего, так же гидросистемой трактора, подают масло в гидроцилиндры 56, которые поворачивают рабочие секции 24 до их опускания на почву, затем гидроцилиндры 56 переводят гидросистемой трактора в плавающее положение. Таким образом, агрегат готов к работе, включают необходимые передачи и начинают движение. В процессе работы рабочие секции 24, установленные на осях 33, подпружиненных пружинами 32, обеспечивают копирование поверхности обрабатываемого поля в поперечной плоскости, а поводки 31 и 52 рабочих секций 24, поворачиваясь на осях 35 и 53, обеспечивают копирование поверхности обрабатываемого поля по вертикали, при этом поворот на осях 35 поводков 31 ограничен поверхностями ограничительных пластин 37 вверх, поверхностями ограничительных пластин 38 вниз. Для увеличения давления рабочих органов на поверхность обрабатываемого поля гидросистемой трактора подают масло в гидроцилиндры 3, которые поворачивают средний поворотный брус 4 до упоров 57, после чего гидросистему трактора переводят в положение заперто, при этом часть веса среднего поворотного бруса 4 и боковых поворотных крыльев 6 передается на рабочие органы, увеличив их давление на почву. После окончания работы для транспортировки агрегата на новое обрабатываемое поле или на машинный двор его переводят в транспортное положение. Для этого у 2-х рабочих секций 24, установленных на боковых поворотных крыльях 6 у концов среднего поворотного бруса 4, оттягивают на себя головки 49, выводя их штифты 50 из фиксации с последующим поворотом по радиальной части направляющих дорожек 51 неподвижных втулок 40 до части направляющих дорожек 51, расположенных по образующим неподвижных втулок 40, после этого головки 49 толкают от себя, надевая их на неподвижные втулки 40, при этом штифты 50 головок 49, перемещаясь по направляющим дорожкам 51 вдоль образующих неподвижных втулок 40, сжимают через подвижные пальцы 48 и пальцы с отверстиями с направляющими шпонками 46 пружины 47, которые, если выход пальцев-фиксаторов с направляющими шпонками 45 не перекрыт поводками 31, выходят из неподвижных втулок 40, фиксируя тем самым поводки 31 в транспортном положении, если поводки 31 перекрывают выход пальцев-фиксаторов с направляющими шпонками 45, то пружины 47 сжимаются, принимая взведенное состояние, фиксируясь затем поворотом головки 49, при этом штифты 50 перемещаются по радикальной части направляющих дорожек 51 до фиксирующего положения, таким образом, устанавливаются оба механизма полуавтоматической фиксации 41, после чего гидросистемой трактора подают масло в гидроцилиндры 3, которые средний поворотный брус 4 вместе с боковыми поворотными крыльями 6 поворачивают до упора 57, при этом поводки 31 у 2-х рабочих секций расположенных у концов среднего поворотного бруса 4 освобождают отверстия неподвижных втулок 40 и пальцы-фиксаторы с направляющими шпонками 45, пружинами 47 выдвигаются из неподвижных втулок 40, фиксируя при этом поводки 31 в транспортном положении, если все таки эти 2-а поводка 31 не будут зафиксированы, то включают необходимую передачу трактора, и агрегат некоторое расстояние проезжает по полю, в результате того, что рабочие секции будут копировать поверхность обрабатываемого поля, а поводки 31 при этом будут двигаться вверх и вниз, то в какой-то момент они откроют отверстия неподвижных втулок 40, что позволит пальцам-фиксаторам с направляющими шпонками 45 выдвинуться из отверстий неподвижных втулок 40, зафиксировав поводки 31 в транспортном положении, после того как эти поводки 31 будут зафиксированы. Перевод агрегата из рабочего в транспортное положение производится в обратном порядке его перевода из транспортного положения в рабочее.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2024 |
|
RU2836822C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2016 |
|
RU2630458C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2015 |
|
RU2581532C1 |
| ШИРОКОЗАХВАТНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2014 |
|
RU2556147C1 |
| ШИРОКОЗАХВАТНЫЙ ПОСЕВНОЙ АГРЕГАТ | 2011 |
|
RU2473198C1 |
| ШИРОКОЗАХВАТНАЯ ТЯЖЕЛАЯ ЗУБОПРУЖИННАЯ БОРОНА | 2012 |
|
RU2488986C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2013 |
|
RU2525160C1 |
| ШИРОКОЗАХВАТНАЯ ПРУЖИННАЯ БОРОНА | 2014 |
|
RU2546176C1 |
| КОМБИНИРОВАННЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ (БОРОНА ПЛЮС ВИНТОВОЙ КАТОК) | 2015 |
|
RU2581530C1 |
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2012 |
|
RU2511945C1 |
Изобретение относится к сельскому хозяйству. Широкозахватный почвообрабатывающий агрегат включает раму с прицепом (1), опирающуюся в задней части на пневматические колеса (2), средний поворотный брус (4), установленный подвижно в задней части рамы с прицепом (1) и соединенный с ней также подвижно гидроцилиндрами (3) для поворота из горизонтального рабочего положения в вертикальное транспортное положение. По торцам среднего поворотного бруса (4) на крестовинах (5) подвижно установлены крылья (6), на торцах которых смонтированы технологические колеса (8), а на передних их стенках установлены транспортные колеса (9). Крайние концы крыльев (6) соединены с передней частью рамы с прицепом (1) растяжками (10), которые состоят из 2-х частей: передних – коротких (11) с уловителями (12), защелками (13) с пальцами (15) и пружинами (14), соединенными через компенсационные пружины (16) тросиками (17) со средним поворотным брусом (4), и задних – длинных (21), одни концы которых соединены подвижно с П-образными поводками (22), установленными подвижно на раме с прицепом (1), другие концы подвижно закреплены на концах крыльев (6) через кронштейны. Рабочие секции (24), состоящие из рамок (25), в подшипниковых узлах которых на валах смонтированы рабочие органы в виде сменных кольчато-шпоровых катков или сменных игольчатых дисков, установлены на крыльях (6) по фронту посредством поводков, на которых они смонтированы подвижно на подпружиненных горизонтально-продольных осях. Поводки на крыльях (6) смонтированы в рамках посредством осей, а рамки на крыльях (6) закреплены хомутами. В рамках под поводками смонтированы под углом друг к другу две ограничительные пластины, вершины углов которых расположены под центрами осей, на которых подвижно установлены в рамках поводки. Передние ограничительные пластины ограничивают поворот поводков с рабочими секциями в процессе работы вверх, а задние ограничительные пластины – вниз. На одних из боковых стенок рамок, посредством которых поводки установлены на крыльях (6), смонтированы неподвижно втулки, в которых установлены пальцы-фиксаторы поводков в транспортном положении. В пальцах-фиксаторах имеются по два отверстия, посредством которых они фиксируются пружинными шплинтами в транспортном или в рабочем положениях. На других боковых стенках рамок закреплены неподвижно втулки, в которых смонтированы механизмы полуавтоматической фиксации поводков рабочих секций при их переводе из рабочего в транспортное или из транспортного в рабочее положение. Механизмы полуавтоматической фиксации поводков состоят из пальцев-фиксаторов с направляющими шпонками и пальцев с отверстиями также с направляющими шпонками, фиксирующими их положение в пазах неподвижных втулок, которые соединены между собой пружинами. Пальцы с отверстиями и направляющими шпонками через подвижные пальцы соединены неподвижно с головками, надетыми на неподвижные втулки, в стенках которых установлены штифты, входящие в направляющие дорожки, расположенные на внешней поверхности неподвижных втулок. Рабочие секции (24) с подпружиненными горизонтально-продольными осями на среднем поворотном брусе (4) установлены подвижно, каждая, посредством своих поводков, которые на осях смонтированы в рамках, закрепленных на среднем поворотном брусе (4) стяжными хомутами. Подвижность рабочих секций (24), установленных по краям среднего поворотного бруса (4), ограничивается гидроцилиндрами, а подвижность других рабочих секций (24) - ограничительными пластинами, установленными под углом друг к другу в их рамках. Вершины этих углов расположены под центрами осей, на которых они подвижно установлены. Все рабочие секции (24) на среднем поворотном брусе (4) фиксируются пальцами-фиксаторами, имеющими два отверстия, посредством которых они устанавливаются в транспортном или рабочем положениях пружинными шплинтами. Механизмы полуавтоматической фиксации поводков рабочих секций (24) устанавливаются только на рамках рабочих секций (24), смонтированных на крыльях (6) и расположенных у концов среднего поворотного бруса (4) агрегата. Обеспечивается упрощение конструкции агрегата, а также повышение качества копирования поверхности обрабатываемого поля. 2 з.п. ф-лы, 5 ил.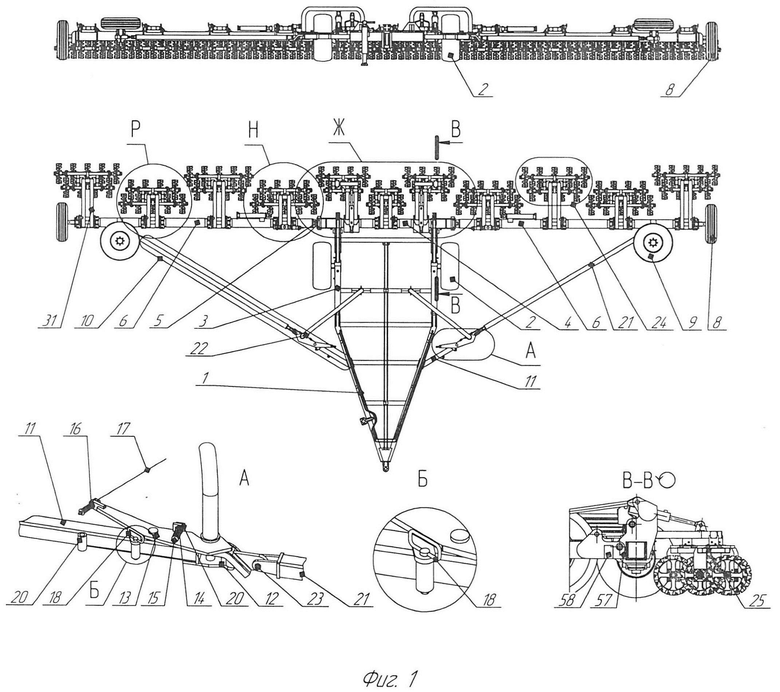
1. Широкозахватный почвообрабатывающий агрегат, включающий раму с прицепом, опирающуюся в задней части на пневматические колеса, средний поворотный брус, установленный подвижно в задней части рамы с прицепом и соединенный с ней также подвижно гидроцилиндрами для поворота из горизонтального рабочего положения в вертикальное транспортное положение, по торцам среднего поворотного бруса на крестовинах подвижно установлены крылья, на торцах которых смонтированы технологические колеса, а на передних их стенках установлены транспортные колеса, крайние концы крыльев соединены с передней частью рамы с прицепом растяжками, которые состоят из 2-х частей: передних - коротких с уловителями, защелками с пальцами и пружинами, соединенными через компенсационные пружины тросиками со средним поворотным брусом, и задних - длинных, одни концы которых соединены подвижно с П-образными поводками, установленными подвижно на раме с прицепом, другие концы подвижно закреплены на концах крыльев через кронштейны, рабочие секции, состоящие из рамок, в подшипниковых узлах которых на валах смонтированы рабочие органы в виде сменных кольчато-шпоровых катков или сменных игольчатых дисков, установлены на крыльях по фронту посредством поводков, на которых они смонтированы подвижно на подпружиненных горизонтально-продольных осях, поводки на крыльях смонтированы в рамках посредством осей, а рамки на крыльях закреплены хомутами, в рамках под поводками смонтированы под углом друг к другу две ограничительные пластины, причем вершины их углов расположены под центрами осей, на которых подвижно установлены в рамках поводки, при этом передние ограничительные пластины ограничивают поворот поводков с рабочими секциями в процессе работы вверх, а задние ограничительные пластины - вниз, на одних из боковых стенок рамок, посредством которых поводки установлены на крыльях, смонтированы неподвижно втулки, в которых установлены пальцы-фиксаторы поводков в транспортном положении, при этом в пальцах-фиксаторах имеются по два отверстия, посредством которых они фиксируются пружинными шплинтами в транспортном или в рабочем положениях, на других боковых стенках рамок закреплены неподвижно втулки, в которых смонтированы механизмы полуавтоматической фиксации поводков рабочих секций при их переводе из рабочего в транспортное или из транспортного в рабочее положение, механизмы полуавтоматической фиксации поводков состоят из пальцев-фиксаторов с направляющими шпонками и пальцев с отверстиями также с направляющими шпонками, фиксирующими их положение в пазах неподвижных втулок, которые соединены между собой пружинами, пальцы с отверстиями и направляющими шпонками через подвижные пальцы соединены неподвижно с головками, надетыми на неподвижные втулки, в стенках которых установлены штифты, входящие в направляющие дорожки, расположенные на внешней поверхности неподвижных втулок, отличающийся тем, что рабочие секции с подпружиненными горизонтально-продольными осями на среднем поворотном брусе установлены подвижно, каждая, посредством своих поводков, которые на осях смонтированы в рамках, закрепленных на среднем поворотном брусе стяжными хомутами, причем подвижность рабочих секций, установленных по краям среднего поворотного бруса, ограничивается гидроцилиндрами, а подвижность других рабочих секций - ограничительными пластинами, установленными под углом друг к другу в их рамках, причем вершины этих углов расположены под центрами осей, на которых они подвижно установлены, при этом все рабочие секции на среднем поворотном брусе фиксируются пальцами-фиксаторами, имеющими два отверстия, посредством которых они устанавливаются в транспортном или рабочем положениях пружинными шплинтами, механизмы полуавтоматической фиксации поводков рабочих секций устанавливаются только на рамках рабочих секций, смонтированных на крыльях и расположенных у концов среднего поворотного бруса агрегата.
2. Широкозахватный почвообрабатывающий агрегат по п. 1, отличающийся тем, что защелки оснащены втулками, посредством которых они фиксируются при работе агрегата на передних - коротких частях растяжек пальцами-фиксаторами.
3. Широкозахватный почвообрабатывающий агрегат по пп. 1 и 2, отличающийся тем, что рабочие секции, смонтированные у внешних концов крыльев, установлены на них так, что при работе агрегата они перекрывают следы, оставляемые рабочими колесами.
| ШИРОКОЗАХВАТНЫЙ ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ | 2016 |
|
RU2630458C1 |
| НЕЯДОВИТЫЙ ЭЛЕКТРОЛИТ ДЛЯ ОСАЖДЕНИЯ СПЛАВА НИКЕЛЬ-ЦИНК | 0 |
|
SU169372A1 |
| Широкозахватный выравниватель почвы | 1984 |
|
SU1173941A1 |
| 0 |
|
SU390861A1 | |
| US 5191942 A, 09.03.1993. | |||

