Изобретение относится к области систем наведения высокоточного артиллерийского и ракетного противотанкового оружия, в частности для обеспечения боевой подготовки комплексов артиллерийского вооружения, и направлено на создание эффективных средств технического обслуживания лазерных каналов управления (ЛКУ), в частности способов и средств диагностики ЛКУ прицельных комплексов артиллерийского вооружения, а более конкретно к области контрольно-измерительной техники - к устройствам диагностики (УД) для контроля параметров ЛКУ приборов наведения при их сборке, юстировке, испытаниях и эксплуатации.
К настоящему времени передовыми признаны два типа систем наведения - с самонаведением («Джевелин» - США, «Спайк» - США, Израиль) и с телеориентированием ракеты в луче лазера («Корнет» - Россия).
Оба названных типа систем обеспечивают поражение танка с высокой вероятностью первым выстрелом. Преимуществом самонаведения является реализация принципа «выстрелил - забыл» и вследствие этого повышенная выживаемость носителя. Недостатком при этом является чрезвычайно высокая стоимость выстрела (около $250 тыс. против $20 тыс. для комплексов типа «Корнет»). Поэтому комплексы на основе телеориентирования в лазерном луче имеют хорошую перспективу как массовое высокоточное оружие. Настоящее предложение направлено на создание эффективных средств технического обслуживания, в частности способов и средств диагностики лазерных каналов управления (ЛКУ) прицельных комплексов.
В настоящее время в состав современных боевых машин (БМ) входит комплекс управляемого вооружения (КУВ) с реализацией второго типа системы наведения, которые используются, например, в танках Т-72, Т-90 и БМП-3. ЛКУ формирует лазерно-лучевой канал для наведения управляемой ракеты.
Комплексы с ЛКУ являются полуавтоматическими, их наземная, т.е. расположенная на носителе, аппаратура содержит оптический визир и лазерный излучатель, расположенные соосно. Визир служит для обнаружения цели, наложения на нее и удержания прицельной марки. Излучатель служит для формирования оптических сигналов в виде частотно модулированного поля управления. Центр поля управления совмещен с прицельной маркой оптического визира.
Лазерный канал управления включает лазерный излучатель, блок модулятора и объектив, формирующие в пространстве луч, направленный на цель. В поперечном сечении луча формируется поле управления заданного геометрического размера, с определенной модуляцией излучения в его различных частях, нормированными параметрами мощности излучения и программного изменения характеристик и размеров поля. По сути поле управления представляет собой изображение (последовательность кадров) спроецированное в пространстве. Модуляция лазерного излучения осуществляется с помощью механического движения оптических элементов или электронной развертки по определенным алгоритмам. Модулированное излучение с помощью оптической системы переносится в плоскость движущейся ракеты, обеспечивая его постоянные линейные размеры в этой плоскости в соответствии с заданными временными параметрами. Аппаратура управления ракеты, принимает излучение точечным фотоприемником, дешифрует сигнал, определяет положение ракеты относительно центра поля управления и вырабатывает команды на рулевые приводы удерживающие ракету в центре поля управления.
Отклонение характеристик излучения или временных параметров ЛКУ от заданных значений приводит к потере управления ракетой. Для своевременного выявления неисправностей и регулировки ЛКУ в процессе производства и эксплуатации используется специальная контрольно-проверочная аппаратура и устройства диагностики (УД).
В процессе эксплуатации боевой машины в период всего жизненного цикла прицельного комплекса необходимо контролировать параметры, выдаваемые аппаратурой ЛКУ. Несоблюдение регламента технического обслуживания и диагностики ЛКУ может привести к частичной или полной потере функционирования лазерно-лучевого канала управления прицельного комплекса.
Из патента RU 2248534С1 известно устройство для контроля параметров лазерного поля управления информационного канала (кл. G01J 1/04, G01J 1/44, опубл. 20.03.2005), включающее фокусирующую систему, в фокальной плоскости которой установлен блок калиброванных диафрагм, снабженный первым механизмом перемещения, и фотоприемное устройство (ФПУ), аналого-цифровой преобразователь (АЦП), контроллер, блок управления (БУ), регистрирующий блок, устройство наведения в пространстве. Также введен блок выделения команд (БВК), фокусирующая система выполнена с переменным значением фокусного расстояния и с постоянным положением фокальной плоскости и содержит телеобъектив и оптическую систему, снабженную вторым механизмом перемещения, первый механизм перемещения выполнен в виде двухкоординатного сканирующего устройства, фокусирующая система с блоком калибровочных диафрагм, ФПУ и БВК выполнены в виде единой оптической головки, снабженной устройством наведения в пространстве, в качестве регистрирующего блока использован персональный компьютер с монитором.
Недостатком данного устройства для контроля параметров лазерного поля управления информационного канала является: необходимость проведения серии измерений с многократным включением штатного лазерного излучателя в начальном и конечном положении панкратической системы ЛКУ с необходимостью остановки штатной циклограммы пуска, не контролируются временные характеристики штатной циклограммы пуска, поле управления контролируется в ограниченном количестве точек, заданных конструкцией устройства.
Из патента RU 83835 известен прибор для контроля параметров лазерного канала управления (кл. G01B 11/00 (2006.01), G02B 27/00, опубл. 20.06.2009), включающий объектив, первую сетку с прозрачной диафрагмой и контрольными метками на ее рабочей поверхности, расположенной в фокальной плоскости объектива, установленную с возможностью перемещения в направлении, перпендикулярном оси объектива, систему подсветки контрольных меток первой сетки, регистрирующее устройство, оптически связанное с первой сеткой, спектроделитель, установленный между первой сеткой и объективом под углом к его оси, первый ослабитель и первое фотоприемное устройство, оптически связанное с объективом посредством спектроделителя, а также электронное устройство обработки и отображения измерительной информации, отличающийся тем, что он снабжен устройством разделения каналов, установленным перед первой сеткой, конвертором, установленным на оптической оси объектива между устройством разделения каналов и первой сеткой, последовательно расположенными на одной оси второй сеткой, рабочая поверхность которой выполнена в виде рассеивающего экрана, первой проекционной системой и вторым фотоприемным устройством, имеющим выход для подключения к видеоконтрольному устройству, а также второй проекционной системой, установленной между спектроделителем и второй сеткой с возможностью вывода из хода лучей, и, по меньшей мере, одним вторым ослабителем пучка лазерного излучения, установленным на оси первой проекционной системы, причем вторая сетка посредством устройства разделения каналов и спектроделителя оптически связана с объективом и установлена в его фокальной плоскости, второе фотоприемное устройство посредством первой проекционной системы оптически связано с рабочей поверхностью второй сетки. Устройство разделения каналов в приборе выполнено в виде плоского зеркала, расположенного под углом к оси объектива с возможностью вывода из хода лучей.
Недостатком данного прибора для контроля параметров лазерного канала управления является установка дополнительного плоского зеркала для контроля центровки пучка лазерного излучения относительно оси лазерного канала управления, ограниченные функциональные возможности, обусловленные невозможностью контроля параметров временной циклограммы работы лазерного канала управления и мощности лазерного излучения, а также невозможность автоматизации процесса контроля, что снижает точность и производительность выполняемых операций.
Для согласования оптических осей устройства контроля и ЛКУ необходимо включать излучатель лазерного канала управления для контроля изображения сечения пучка лазерного излучения на выходе контролируемого изделия на экране видеоконтрольного устройства и его центрировки относительно выходного зрачка лазерного канала управления.
Из патента RU 2350891 известно устройство для контроля параметров лазерного канала управления (кл. F41G 3/32, G02B 27/62, F41G 7/26, опубл. 27.03.2009), включающее объектив, сетку с прозрачной диафрагмой и контрольными метками на ее рабочей поверхности, установленную с возможностью перемещения в направлении, перпендикулярном оси объектива, систему подсветки контрольных меток сетки, первое фотоприемное устройство, оптически связанное с сеткой, и электронное устройство управления, обработки и выдачи измерительной информации. Введены установленные на оптической оси объектива спектроделитель, ослабитель лазерного излучения, второе фотоприемное устройство, а также электропривод перемещения сетки, датчик положения сетки и видеосмотровое устройство. Первый и второй входы электронного устройства подключены к выходам первого и второго фотоприемных устройства, третий вход - к датчику положения сетки, четвертый вход имеет возможность подключения к выходу, а первый выход - к входу лазерного канала управления контролируемого прибора, второй выход - к электроприводу перемещения сетки, а третий выход - к видеосмотровому устройству.
Недостатком данного устройства для контроля параметров лазерного канала управления является то, что также необходимо включать излучатель лазерного канала управления для контроля изображения сечения пучка лазерного излучения на выходе контролируемого изделия на экране видеоконтрольного устройства и его центрировки относительно выходного зрачка лазерного канала управления, а электронное устройство обработки и отображения измерительной информации имеет большое количество точек подключения к обслуживаемому изделию. В данном устройстве по меньшей мере, четыре входа и три выхода, при этом первый и второй-входы подключены к выходу первого фотоприемного устройства и к выходу второго фотоприемного устройства соответственно, третий его вход подключен к датчику положения сетки, четвертый вход имеет возможность подключения к выходу, а первый выход соответственно к входу лазерного канала управления контролируемого прибора, второй выход подключен к электроприводу перемещения сетки, а третий выход подключен к видеосмотровому устройству обслуживаемого изделия.
Все выше перечисленные устройства предназначены для контроля параметров лазерного канала управления, объединены общим способом определения параметров лазерного излучения. Наиболее близким техническим решением по числу определяемых характеристик и уровню автоматизации процесса измерений является устройство из патента RU 2350891, опубл. 27.03.2009, - прототип.
Общность способа контроля параметров лазерного излучения и конструкции описанных устройств перечисленных выше устройств состоит в следующем:
- для диагностики изображения сечения пучка лазерного излучения на выходе контролируемого изделия необходимо включить излучатель лазерного канала управления;
- изображение поля управления с помощью оптической системы проецируется в плоскость блока переключающихся (или перемещающейся) диафрагм, из которых только одна открыта;
- через отверстие диафрагмы изображение определенного точечного участка поля управления, попадает на аналоговый фотоприемник (фотодиод), который переводит оптическое излучение в электрический сигнал;
- электрический сигнал оценивается по амплитуде (измеряется мощность излучения), оцифровывается АЦП и затем производится измерение частотной характеристики сигнала и расчет пеленгационной характеристики поля управления (коэффициента команд) в одной выбранной точке. Для измерения параметров излучения в другой точке поля управления необходимо открыть другое отверстие в блоке диафрагм (переместить подвижную диафрагму).
Таким образом, способ, используемый для диагностики и контроля параметров лазерного канала управления устройствами, заключается в последовательном измерении параметров характеристик поля управления в нескольких заранее заданных точках с помощью трансформации оптического излучения (изображения) в электрический сигнал, его измерении и сравнении полученных результатов с установленными нормами.
Недостатки такого способа диагностики и контроля заключаются в следующем:
- измерение характеристик производится в ограниченном количестве точек поля управления (обычно 9 шт.), число которых конструктивно ограничено количеством открывающихся отверстий диафрагмы (или точек позиционирования подвижной диафрагмы). При наличии нарушений характеристик участков поля, находящихся вне установленных точек, неисправность ЛКУ выявить невозможно;
- последовательное измерение характеристик поля в разных точках требует остановки циклограммы пуска для исключения изменения размера поля управления до окончания измерений во всех точках. Это приводит к необходимости электрического подключения к контролируемому изделию и перевода его в тестовый режим. Ряд современных контролируемых изделий не обеспечивает такой возможности, а в некоторых остановка циклограммы пуска невозможна, из-за особенностей алгоритма формирования поля управления. Подключение к электрическим цепям контролируемого изделия требует высокой квалификации персонала и может привести к выходу его из строя;
- необходимость последовательного перемещения или открытия отверстий диафрагм в заданных точках требует больших затрат времени на проведение диагностики и значительного расхода ресурса излучателя ЛКУ;
- трансформация оптического излучения (изображения) в электрический сигнал требует разработки и использования индивидуальных аппаратных средств для различных типов контролируемых устройств из-за отличающихся способов модуляции и размеров поля управления. Существующие устройства обеспечивают проверку только одного конкретного типа изделия с ЛКУ и не могут быть использованы для диагностики схожих по принципам устройства и наведения систем;
- сложная оптическая схема с большим числом подвижных элементов не обеспечивает возможность эксплуатации устройств в полевых условиях, а необходимость разработки индивидуальных электронных схем для обработки сигналов исключают универсальность конструкции.
Задачей изобретения является разработка энергоэффективного и простого способа диагностики и контроля параметров ЛКУ прицельных комплексов танков, боевых машин пехоты (БМП), реализующий более простой порядок проведения диагностики ЛКУ прицельных комплексов артиллерийского вооружения с любыми комбинированными прицелами танков, БМП, боевых модулей с ракетным вооружением, и его осуществление в автоматизированном устройстве диагностики ЛКУ (УД ЛКУ) любых комбинированных прицелов, включающего коллиматор, кронштейн для установки коллиматора и специальное программное обеспечение (ПО), обеспечивающего оценку энергетического потенциала излучателя канала управления, характеристик излучения ЛКУ формирующих поле управления, параметров временной циклограммы работы ЛКУ и оценку их отклонений от заданных значений, в процессе эксплуатации прицельных комплексов, в том числе в полевых условиях, с минимальными требованиями к обслуживающему персоналу без:
- многократного включения излучателя ЛКУ;
- перевода комбинированных прицелов в тестовый режим, с возможностью определять отклонения характеристик ЛКУ во время его штатной работы;
- подключения к электрическим цепям контролируемого прицела;
- остановки циклограммы пуска и изменения штатной циклограммы производства выстрела, с возможностью:
- выверки рассогласования осей информационного и визирного каналов, а также
- производства автоматической оценки соответствия полученных результатов контроля установленным нормативам при штатной холостой работе диагностируемого ЛКУ,
- визуализации поля управления для юстировки, контроля отсутствия неравномерностей освещенности, загрязнений и геометрии поля управления широкого перечня ЛКУ прицельных комплексов.
Поставленная задача решается благодаря тому, что для реализации способа контроля параметров лазерного канала управления в устройстве диагностики параметров лазерного канала управления прицельных комплексов, включающее коллиматор, имеющий в составе объектив, первое фотоприемное устройство, с последовательно установленным под углом на оптической оси объектива спектроделителем, ослабитель лазерного излучения, второе фотоприемное устройство и электронное устройство управления, обработки и выдачи измерительной информации на базе программируемого электронного модуля, со входами и выходами для подключения комплектом проводов к контролируемому прибору и внешнему компьютеру, объектив коллиматора устройства выполнен с переменным фокусным расстоянием и состоит из двух линз, одна из которых подвижная с электроприводом, отсутствует необходимость подключения к лазерному каналу управления контролируемого прицельного комплекса, для фокусировки излучения, введен объектив фотоприемного устройства, выполненного в виде матричного сенсора, на оптической оси объектива, на оси отраженного от первого спектроделительного зеркала пучка излучения введено еще одно спектроделительное зеркало, располагаемое под углом, с оптически связанными с ним двумя фотоприемными устройствами, с помощью комплекта соединительных кабелей к входам и выходам устройства диагностики параметров лазерного канала управления прицельных комплексов подключаются источник постоянного тока, центральный контакт электроспуска, контакт «масса» контролируемого прибора лазерного прицельного комплекса, контакты кабеля концевого выключателя контроля отката пушки, внешний компьютер.
При этом фотоприемные устройства, оптически связанные со вторым спектроделительным зеркалом, выполнены в виде линейных сенсоров высокого разрешения, которые представляют собой высокочувствительный и быстродействующий аналог матричного сенсора, но различаются наличием количеством чувствительных пикселов, для горизонтального матричного сенсора свойственно наличие всего нескольких строк чувствительных пикселей по вертикали и значительного числа пикселей по горизонтали, а для вертикального матричного сенсора характерно наличие всего нескольких строк пикселов по горизонтали и значительного числа пикселей по вертикали, что обеспечивает быстродействие сенсоров при построчном сканировании изображения поля управления в вертикальной и горизонтальной плоскости в определенные моменты циклограммы работы ЛКУ без необходимости ее остановки.
Для реализации способа контроля параметров аппаратурного канала управления ЛКУ прицельных комплексов программируемый блок электроники коллиматора устройства, выполненный на базе свободно-программируемых контроллеров с установленным ПО, включает плату питания, плату формирования изображений, контролер управления режимами работы коллиматора и плату передачи данных в специальное программное обеспечение, установленное о внешний компьютер.
Для крепления устройства диагностики на выходе контролируемого прибора комбинированного прицела прицельного комплекса используется кронштейн с каретками вертикального и горизонтального перемещения, с винтами регулировки углов разворота коллиматора, для обеспечения согласования оси лазерного канала управления и оптической оси устройства.
Способ контроля параметров лазерного канала управления прицельных комплексов реализующий процесс измерения параметров характеристик поля управления в лазерном канале управления и сравнении полученных результатов с установленными нормами., реализуемый в устройстве, заключается в получении изображений последовательности кадров поля управления и математическом анализе полученных изображений с учетом временной циклограммы работы контролируемого изделия после включения ЛКУ контролируемого изделия, прохождения модулированного параллельного пучка излучения через объектив устройства и попадания части пучка на первое спектроделительное зеркало, которое для разделения пучка установлено под углом к оптической оси объектива, при этом часть пучка излучения, прошедшая через спектроделительное зеркало фокусируется объективом в плоскости чувствительной площадки матричного сенсора, момент попадания пучка на площадку матричного сенсора является точкой отсчета для измерения временных характеристик ЛКУ, когда в процессе работы ЛКУ изображение поля управления изменяет размер и положение относительно оптической оси коллиматора по заданному закону и в соответствии с временной циклограммой, происходит определение величины интегральной яркости изображения, что обеспечивает измерение мощности излучения ЛКУ, при этом ПО устройства на основе сопоставления моментов появления и исчезновения изображения, его яркости, изменения размеров и положения, с временной циклограммой работы ЛКУ и установленными нормативными значениями выдает заключение о соответствии или отклонении измеренных параметров от нормативов в таблице протокола, а вторая часть пучка отражается от спектроделительного зеркала и, в свою очередь, делится вторым спектроделительным зеркалом на две части, при этом первая часть попадает на линейный сенсор установленный параллельно вертикальной оси поля управления, а второй на линейный сенсор, установленный параллельно горизонтальной оси поля управления,-что обеспечивает построчное сканирование изображения поля управления в вертикальной и горизонтальной плоскости в определенные моменты циклограммы работы ЛКУ без необходимости ее остановки, в дальнейшем плата формирования изображений собирает строки в полноценное изображение нескольких последовательных кадров поля управления и передает его в контролер управления режимами работы коллиматора устройства с установленным ПО,-после математической обработки полученных кадров вычисляются частоты модуляции и коэффициенты команд во множестве точек поля управления одновременно происходит сравнение с нормативными значениями и формируется команда с заключением о соответствии или отклонении измеренных параметров от нормативов в таблице протокола, через плату передачи данных.
Измерение всех требуемых характеристик ЛКУ производится за два цикла работы ЛКУ, при этом подвижная линза объектива коллиматора в первом цикле перемещается в процессе измерений по определенному закону для удержания фокусировки изображения на матричном сенсоре, а во втором цикле занимает фиксированное положение, обеспечивающее наибольший размер поля управления на линейных сенсорах высокого разрешения.
Предлагаемый способ реализуется в полностью автоматическом режиме при этом ПО устройства и программируемый блок электроники коллиматора УД ЛКУ обеспечивает самотестирование исправности всех систем устройства и индикацию ошибок в процессе контроля параметров лазерного канала управления прицельного комплекса.
Способ и устройство для его реализации обеспечивают возможность контроля любых ЛКУ прицельных комплексов только за счет изменения настроек устройств коллиматора и алгоритма анализа изображений поля управления в ПО.
Техническим результатом является реализация способа и создание устройства диагностики лазерного канала управления с низким энергопотреблением, реализующего принципиально новый способ определения характеристик поля управления и временных параметров ЛКУ, для автоматизированного измерения характеристик поля управления и временных параметров циклограммы любых ЛКУ и оценке их соответствия нормативам при штатной холостой работе контролируемого изделия, обеспечивающего количественную и качественную оценку энергетического потенциала ЛКУ, отклонений характеристик излучения и параметров временной циклограммы ЛКУ от заданных нормативов.
Использование устройства диагностики лазерного канала управления (УД ЛКУ) со специальным программным обеспечением для реализации способа позволяет:
- кратно сократить количество включений излучателя ЛКУ;
- не ограничивать время непрерывной работы при проведении диагностики и не переводить комбинированный прицел в тестовый режим;
- отказаться от необходимости электрического подключения к контролируемому изделию и перевода его в тестовый режим;
- значительно сократить время диагностики поля управления изделия;
- отказаться от трансформации оптического излучения (изображения) в электрический сигнал не требует разработки и использования индивидуальных аппаратных средств для различных типов контролируемых устройств;
- проводить измерения характеристик во всем поле управления;
- повысить количество контролируемых параметров ЛКУ;
- повысить точность выявления участков поля с нарушенными характеристиками;
- сократить состав комплекта оборудования устройства;
- снизить массу устройства для диагностики;
- использовать простой по конструкции коллиматор уменьшенного размеры;
- вести электронный архив проведения диагностики с возможностью печати протокола;
- отказаться от лабораторных стабилизированных источников питания и использовать электропитание от бортовой сети объекта обслуживания постоянным напряжением 20…32 В;
- отказаться от технического обслуживания аппаратуры из-за наличия внутреннего контроля;
- повысить автоматизацию выполняемых операций контроля и обработки результатов измерений, исключить «человеческий фактор».
Заявляемый способ заключается в получении изображений последовательности кадров поля управления и математическом анализе этих изображений с учетом временной циклограммы работы контролируемого изделия. При анализе оцениваются времена появления, изменения положения и исчезновения излучения, размеры и форма поля управления, энергия излучения и частотная модуляция поля управления по всей площади изображения, положение центра поля управления относительно оптической оси визира контролируемого изделия на протяжении всего цикла работы ЛКУ.
Таким образом, заявляемое изобретение обеспечивает автоматизированное измерении характеристик поля управления и временных параметров циклограммы ЛКУ, а также оценку соответствия полученных результатов установленным нормативам при штатной холостой работе контролируемого изделия без необходимости подключения к контролируемому изделию и остановки циклограммы пуска.
Для осуществления заявляемого способа предлагается устройство диагностики включающее коллиматор, кронштейн, комплект соединительных кабелей и специальное программное обеспечение (ПО).
Коллиматор состоит из корпуса, в котором размещены оптическая система, зеркала, сенсоры, блок электроники и разъемы соединительные для подключения кабелей питания и связи. Блок электроники коллиматора включает плату формирования изображений, плату питания, контролер управления режимами работы коллиматора и плату связи.
В переднем торце корпуса коллиматора имеется входное окно объектива оптической системы, закрытое защитным стеклом. Оптическая система коллиматора включает объектив с переменным фокусным расстоянием состоящий из неподвижной линзы и подвижной линзы с электроприводом, двух спектроделительных зеркал, объектив матричного сенсора, матричный сенсор и два линейных сенсора.
На корпусе коллиматора размещены соединительные разъемы для подключения комплекта соединительных кабелей питания и связи, а также выключатель питания. Коллиматор с помощью комплекта соединительных кабелей подключается к центральному контакту электроспуска, контакту «масса» контролируемого прибора прицельного комплекса, к разъему кабеля концевого выключателя пушки контроля отката пушки, к щитку электропитания и внешнему компьютеру.
Точкой начала отсчета для диагностики и измерения временных характеристик ЛКУ является момент появления импульса напряжения на центральном контакте электроспуска пушки, поступающего по кабелю на плату контроллера коллиматора. Сигнал о появления импульса передаваемый контроллером в ПО запускает процесс измерения характеристик ЛКУ.
В некоторых комплексах вооружения для штатной работы ЛКУ требуется подтверждение производства выстрела с помощью замыкания контактов концевого выключателя пушки, срабатывающего при откате орудия при выстреле (сигнал «СХОД»). Для имитации этого сигнала, без участия человека, блок электроники коллиматора содержит реле, контакты которого во время проверки соединяются кабелем с разъемом кабеля концевого выключателя пушки, отсоединенным от концевого выключателя на пушке. Контакты реле замыкаются по сигналу, получаемому от платы контроллера с определенной задержкой, после появления импульса напряжения на центральном контакте электроспуска.
Электропитание УД ЛКУ осуществляется от источника постоянного тока. В полевых условиях электропитание обеспечивается от электросети обслуживаемого изделия.
ПО, установленное на внешнем компьютере, обеспечивает взаимную юстировку оптических осей ЛКУ и коллиматора УД ЛКУ, автоматическое управление режимами работы сенсоров и подвижной линзы объектива коллиматора, запись параметров излучения ЛКУ, проведение анализа и оценку соответствия полученных результатов установленным нормативам, формирование печатного протокола.
Для установки коллиматора на объектах обслуживания при проведении проверок ЛКУ прицелов используется специальный кронштейн, для этого на верхней поверхности корпуса коллиматора имеются четыре резьбовые втулки для крепления коллиматора к кронштейну.
Кронштейн с закрепленным коллиматором устанавливается на изделие с прибором ЛКУ комбинированного прицела.
Кронштейн представляет собой конструкцию с подвижными каретками, винтами регулировки углов разворота коллиматора, предназначенную для крепления коллиматора к объекту обслуживания и обеспечивающую совмещение оптической оси коллиматора и ЛКУ прицела путем точного линейного и углового перемещения корпуса коллиматора в вертикальной и горизонтальной плоскости, а также компенсации крена.
Для обслуживания приборов ЛКУ прицелов другого типа могут изготавливаться другие переходные кронштейны, имеющие индивидуальную конструкцию для конкретных объектов. Переходные кронштейны входят в состав комплекта сменных частей.
Заявляемый способ контроля параметров лазерного канала управления прицельных комплексов и устройство диагностики для его осуществления иллюстрируется чертежами, представленными на фиг. 1, 2, 3, 4, где:
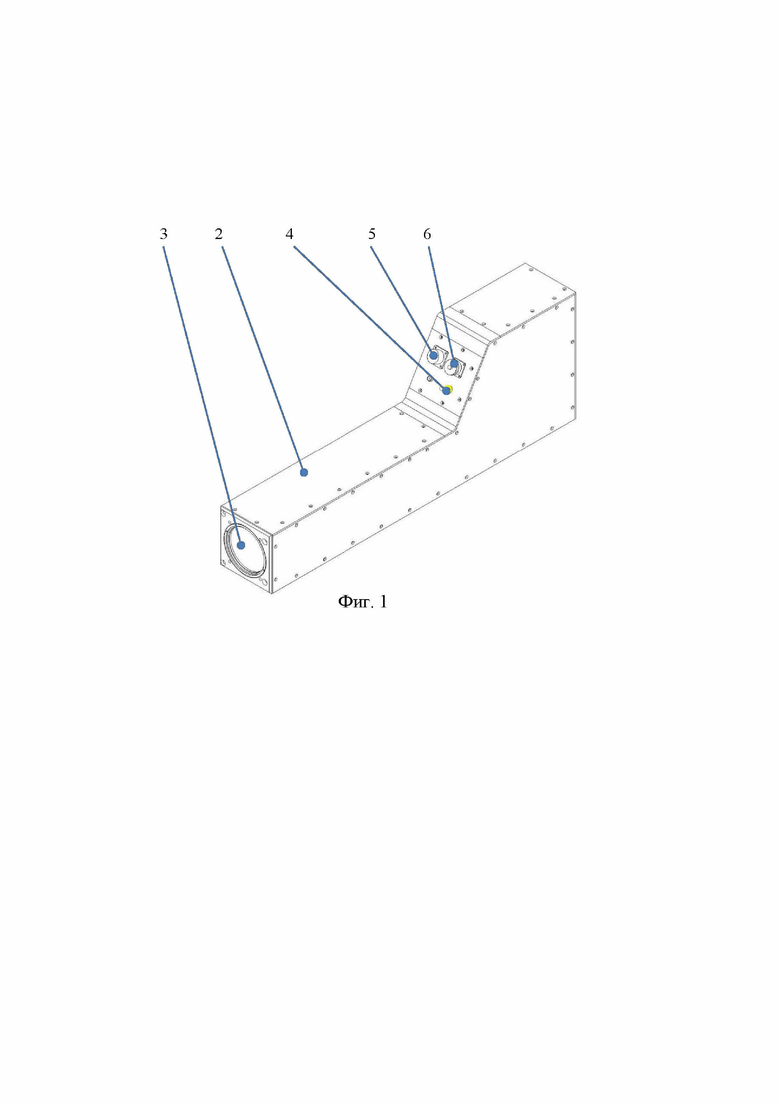
На фиг. 1 - общий вид коллиматора;
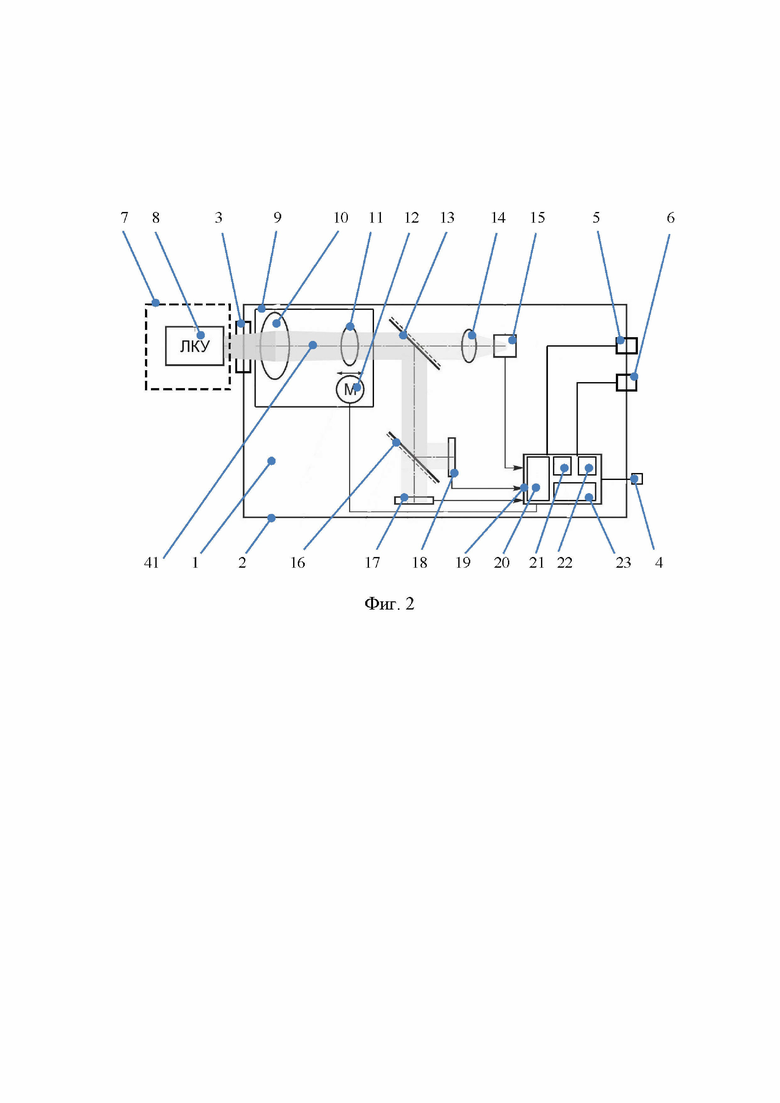
На фиг. 2 - состав и оптическая схема диагностики;
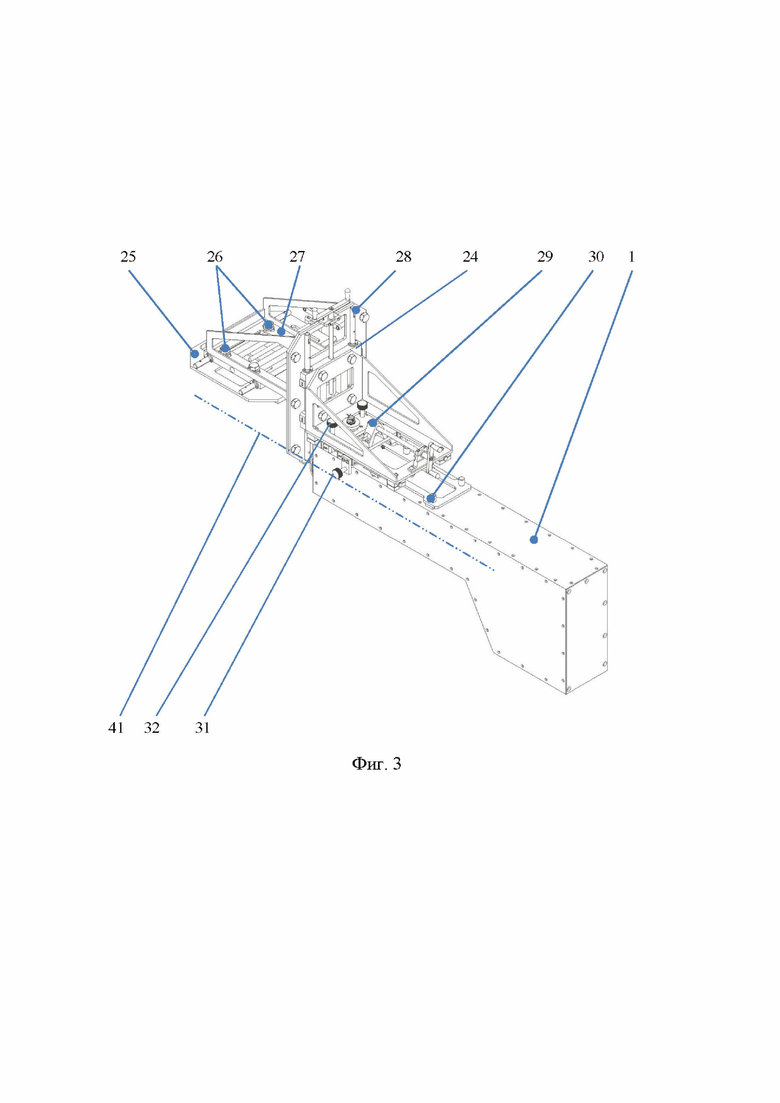
На фиг. 3 - общий вид кронштейна;
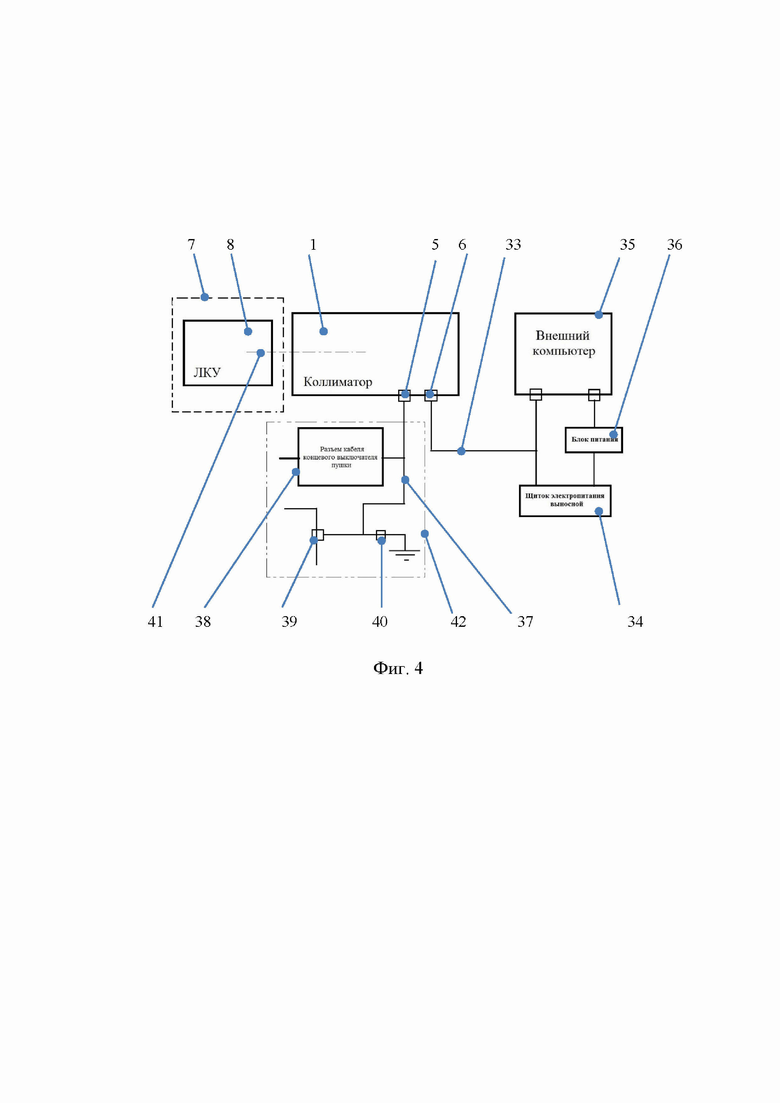
На фиг. 4 - схема соединений при диагностике;
На фигурах 1-4 позициями обозначены следующие элементы.
1 - коллиматор;
2 - корпус;
3 - входное окно объектива;
4 - выключатель питания;
5 - разъем соединительный;
6 - разъем соединительный;
7 - прицельный комплекс;
8 - прибор ЛКУ;
9 - объектив;
10 - неподвижная линза;
11 - подвижная линза;
12 - электропривод;
13 - первое спектроделительное зеркало;
14 - объектив матричного сенсора;
15 - матричный сенсор;
16 - второе спектроделительное зеркало;
17 - линейный горизонтальный сенсор;
18 - линейный вертикальный сенсор;
19 - блок электроники;
20 - плата питания;
21 - плата формирования изображений;
22 - контроллер управления режимами работы;
23 - плата передачи данных;
24 - кронштейн;
25 - неподвижная крепежная пластина;
26 - крепежные отверстия;
27 - подвижная горизонтальная каретка;
28 - подвижная вертикальная каретка;
29 - каретка продольного перемещения;
30 - отверстия крепления коллиматора;
31 - винты регулировки по горизонту;
32 - винты регулировки по вертикали;
33 - соединительный информационный кабель;
34 - щиток электропитания выносной;
35 - внешний компьютер;
36 - блок питания;
37 - соединительный контактный кабель;
38 - разъем кабеля концевого выключателя контроля отката пушки;
39 - центральный контакт электроспуска;
40 - контакт «масса» контролируемого изделия;
41 - оптическа ось объектива коллиматора и ЛКУ;
42 - объект обслуживания.
Устройство диагностики параметров лазерного канала управления прицельных комплексов состоит из коллиматора 1, кронштейна 24, соединительного информационного кабеля 33 и соединительного контактного кабеля 37.
Общий вид коллиматора приведен на фиг. 1. Коллиматор 1 состоит из корпуса 2, в переднем торце которого имеется входное окно объектива 3, закрытое защитным стеклом. На корпусе 2 коллиматора 1 размещены разъемы соединительные 5 и 6 и выключатель питания 4.
Оптическая система коллиматора 1, приведенная на фиг. 2, включает объектив 3 с переменным фокусным расстоянием состоящий из неподвижной линзы 10, подвижной линзы 11 с электроприводом 12, первое спектроделительное зеркало 13, объектив матричного сенсора 14, матричный сенсор 15, второе спектроделительное зеркало 16, линейный сенсор горизонтальный 17 и линейный сенсор вертикальный 18.
В корпусе 2 коллиматора 1 также размещен блок электроники 19, к которому подключены сенсоры 15, 7, 18 и электропривод 12 подвижной линзы 11, включающий плату питания 20, плату формирования изображений 21, контроллер управления режимами работы 22, плату передачи данных 23.
Для установки коллиматора 1 на прицельном комплексе 7 объектах обслуживания при проведении проверок приборов ЛКУ 8 прицельных комплексов используется специальный кронштейн 24 (фиг.3). Кронштейн 24 представляет собой конструкцию, предназначенную для крепления коллиматора 1 к прицельному комплексу 7 объекта обслуживания и обеспечивает совмещение оптической оси коллиматора 1 и оптической оси объектива коллиматора и ЛКУ 41 прибора ЛКУ 8 путем точного линейного и углового перемещения коллиматора 1 в вертикальной и горизонтальной плоскости, а также компенсации крена.
Коллиматор 1 крепится на кронштейн 24 с помощью болтов, через отверстия крепления коллиматора 30 в подвижной каретке 29. Кронштейн 24 имеет пространственную конструкцию, состоящую из:
- неподвижной крепежной пластины 25, имеющей четыре крепежных отверстия 26, предназначенных для монтажа кронштейна 24 на бронеколпак прицельного комплекса 7;
- подвижной каретки 27 с механизмом перемещения кронштейна 24 в горизонтальной плоскости относительно неподвижной крепежной пластины 25;
- подвижной каретки 28 с механизмом перемещения кронштейна 24 в вертикальной плоскости перпендикулярной неподвижной крепежной пластины 25;
- подвижной каретки 29 с механизмом продольного перемещения коллиматора 1 вдоль визирной линии оси 41 прицельного комплекса 7, с винтами регулировки по горизонту 31 и винтами регулировки по вертикали 32 для регулировки угла разворота коллиматора 1 горизонтальной и вертикальной плоскости.
Для подключения коллиматора 1 в состав устройства диагностики входит соединительный информационный кабель 33 и соединительный контактный кабель 37. Соединительный информационный кабель 33 имеет разветвленную конструкцию и предназначен для подключения коллиматора 1 к щитку электропитания выносному 34 с источником постоянного тока с напряжением 27 В и к внешнему компьютеру 35 соединителем Ethernet. Внешний компьютер 35 своим штатным кабелем с блоком питания 36 подключается к щитку электропитания выносному 34.
Соединительный контактный кабель 37 имеет разветвленную конструкцию, одна ветвь предназначена для подключения коллиматора 1 к центральному контакту электроспуска 39 на клине затвора пушки (к примеру) и к контакту «масса» контролируемого изделия 40 объекта обслуживания 42 и служит для приема сигнала от кнопки выстрела из пушки на пульте наводчика. Вторая ветвь соединительного контактного кабеля 37 подключает коллиматор 1 к разъему кабеля концевого выключателя контроля отката пушки 38 и служит для подачи сигнала «Сход» в процессе проведения контроля параметров ЛКУ.
Устройство диагностики для осуществления заявляемого способа работает следующим образом.
Коллиматор 1 устанавливается перед выходным окном прицела прицельного комплекса 7 объекта обслуживания 42 на кронштейне 24. С помощью соединительных кабелей 33 и 37 из состава устройства диагностики коллиматор 1 подключается к внешнему компьютеру 35 и пушке в составе объекта обслуживания 42 в соответствии со схемой соединений фиг. 4. Запускается ПО устройства диагностики, коллиматор 1 переводится в режим юстировки с прицелом. Подсвечивая источником света от устройства юстировки (из состава объекта обслуживания) окуляр прицела и перемещая коллиматор 1 с помощью механизмов перемещения кронштейна 24 добиваются попадания светового пятна в центры всех сенсоров 15, 17 и 18 и, таким образом, совпадения оптической оси объектива 9 с оптической осью объектива коллиматора и ЛКУ 41 прицельного комплекса.
По окончании юстировки ПО и коллиматор 1 переводятся в режим измерений. При включении излучателя прибора ЛКУ 8 (фиг.2) прицельного комплекса 7 объекта обслуживания 42, модулированный пучок излучения проходит через входное окно объектива 3 и попадает в объектив 9. После объектива 9 модулированный пучок излучения попадает в виде параллельного пучка на первое спектроделительное зеркало 13, которое для разделения пучка установлено под углом к оптической оси объектива 9.
Часть излучения проходит через первое спектроделительное зеркало 13, ослабляется в несколько раз и фокусируется объективом 14 в плоскости чувствительной площадки матричного сенсора 15. Цифровое изображение модулированного пучка излучения прибора ЛКУ 8 передается через плату формирования изображения 21 и плату передачи данных 23 блока электроники 19 коллиматора 1 в ПО установленное на внешнем компьютере 35.
В процессе работы ЛКУ изображение поля управления на этом матричном сенсоре 15, изменяет размер и положение относительно оптической оси объектива 9 по заданному закону в соответствии с временной циклограммой. Величина интегральной яркости изображения обеспечивает измерение мощности излучения. ПО устройства на основе сопоставления моментов появления и исчезновения изображения, его яркости, изменения размеров и положения, с заданной временной циклограммой работы ЛКУ прибора ЛКУ 8 и установленными нормативными значениями автоматически выдает заключение о соответствии или отклонении измеренных параметров от нормативов в таблице протокола.
Вторая часть пучка излучения отражается от первого спектроделительного зеркала 13 на второе спектроделительное зеркало 16 и, в свою очередь, делится вторым зеркалом на две части. Первая часть попадает на линейный вертикальный сенсор 18, установленный параллельно вертикальной оси поля управления, а второй на линейный горизонтальный сенсор 17, установленный параллельно горизонтальной оси поля управления.
Линейные сенсоры 17 и 18 высокого разрешения представляют собой высокочувствительный и быстродействующий аналог матричного фотоприемника, но отличаются наличием всего нескольких строк чувствительных пикселей по вертикали и значительного числа пикселей по горизонтали.
Быстродействие сенсоров 17 и 18 обеспечивает построчное сканирование изображения поля управления в вертикальной и горизонтальной плоскости в определенные моменты циклограммы работы ЛКУ без необходимости ее остановки. Плата формирования изображений 21 собирает строки в полноценное изображение нескольких последовательных кадров поля управления и передает его, через плату передачи данных 23 в ПО УД ЛКУ на внешний компьютер 35 по соединительному информационному кабелю 33.
Установленное ПО: автоматически проводит математическую обработку изображения полученных кадров вычисляет частоты модуляции и коэффициенты команд во множестве точек поля управления одновременно, сравнивает с нормативными значениями и выдает заключение о соответствии или отклонении измеренных параметров от нормативов в таблице протокола.
Измерение и диагностика всех требуемых характеристик ЛКУ прибора ЛКУ 8 прицельного комплекса 7 производится за два штатных цикла работы прибора ЛКУ 8, при этом подвижная линза 11 с электроприводом 12 объектива 9 в процессе измерений занимает несколько фиксированных позиций, обеспечивающее необходимые размеры поля управления на сенсорах 15, 1 и 18 на протяжении всего временного цикла работы прибора ЛКУ 8. Позиции подвижной линзы 11 задаются контроллером управления режимами работы 22 в соответствии с командами, поступающими от ПО.
Чувствительность (коэффициент усиления) сенсоров 15, 17, 18, время экспозиции кадров во время измерения и диагностики, а также юстировки оптической оси объектива 9 коллиматора 1 и прибора ЛКУ 8 при подготовке задаются контроллером управления режимами работы 22 в соответствии с командами, поступающими от ПО. Возможность регулировки этих параметров в широких пределах обеспечивает возможность использования коллиматора 1 для анализа излучения различной мощности и характера частотной модуляции только за счет модификации ПО, без необходимости изменения конструкции коллиматора 1.
Точкой начала отсчета для измерения временных характеристик ЛКУ в приборе ЛКУ 8 является момент появления импульса напряжения на центральном контакте электроспуска 39 пушки объекта обслуживания 42, поступающего по соединительному контактному кабелю 37 в блок электроники 19 на плату с контроллером управления режимами работы 22. Сигнал о появления импульса передаваемый контроллером 22 в ПО запускает процесс измерения и диагностики характеристик ЛКУ.
В некоторых прицельных комплексах вооружения для штатной работы ЛКУ требуется подтверждение производства выстрела с помощью замыкания контактов концевого выключателя срабатывающего при откате орудия при выстреле (сигнал «СХОД»). Для имитации этого сигнала, без подключения к диагностируемому прицельному комплексу 7 и без участия человека, блок электроники 19 коллиматора 1 содержит реле, контакты которого во время проверки соединяются кабелем 37 с разъемом кабеля концевого выключателя контроля отката пушки 38, отсоединенным от концевого выключателя на пушке. Контакты реле замыкаются по сигналу, получаемому от контроллера управления режимами работы 22 с определенной задержкой, после появления импульса напряжения на контактах разъема кабеля концевого выключателя контроля отката пушки 38.
Заявляемый способ контроля ЛКУ реализуется в полностью автоматическом режиме. ПО и блок электроники 19 коллиматора 1 обеспечивают самотестирование исправности всех систем и индикацию ошибок ЛКУ.
Заявляемое устройство диагностики способно обеспечить контроль любых ЛКУ прицельных комплексов только за счет изменения настроек устройств коллиматора и алгоритма анализа изображений поля управления. Принципиально новый способ определения характеристик лазерного излучения позволил разработать сравнительно простую универсальную конструкцию для его осуществления.
Таким образом, заявляемое изобретение обеспечивает автоматизированное измерение характеристик поля управления и временных параметров циклограммы ЛКУ, а также оценку соответствия полученных результатов установленным нормативам при штатной холостой работе контролируемого изделия без необходимости подключения к контролируемому изделию и остановки циклограммы пуска.
Заявляемое изобретение имеет следующие преимущества:
- способ и устройство обеспечивают контроль характеристик лазерного излучения всех известных ЛКУ;-
- повышение производительности операции технического обслуживания в 4-6 раз;
- не требуется подключение устройства к контролируемому изделию и остановки циклограммы работы ЛКУ;
- не требуется вмешательство оператора в процесс измерения параметров ЛКУ;
- исключается зависимость от «человеческого фактора» при оценке результатов диагностики;
- увеличение числа контролируемых параметров ЛКУ, обеспечение возможности контроля характеристик по всей площади поля управления;
- в 10 раз сокращает расхода ресурса излучателя ЛКУ при проведении ТО;
- позволяет документировать и архивировать результаты диагностики с идентификацией объекта обслуживания;
- простая надежная конструкция коллиматора, небольшие габариты, масса и ограниченный состав комплекта устройства облегчают его эксплуатацию, в том числе в полевых условиях;
- устройство не требует специализированных источников питания, используется бортовая сеть проверяемой боевой машины;
- устройство не требует технического обслуживания в течение всего срока эксплуатации;
- универсальная конструкция и алгоритм измерений устройства обеспечивают расширение возможности диагностики любых известных и перспективных систем ЛКУ только путем изменения программного обеспечения;
- устройство обладает сравнительно низкой стоимостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2005 |
|
RU2299402C1 |
| ДАЛЬНОМЕРНО-ВИЗИРНЫЙ ПРИБОРНЫЙ КОМПЛЕКС | 2010 |
|
RU2437051C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| СПОСОБ ВЫВЕРКИ ПАРАЛЛЕЛЬНОСТИ ВИЗИРНЫХ ОСЕЙ МУЛЬТИСПЕКТРАЛЬНЫХ КОМПЛЕКСОВ | 2010 |
|
RU2443988C2 |
| КОМБИНИРОВАННЫЙ ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ | 2008 |
|
RU2375665C2 |
| ПРИЦЕЛ-ПРИБОР НАВЕДЕНИЯ С ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2011 |
|
RU2464601C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО КАНАЛА УПРАВЛЕНИЯ | 2007 |
|
RU2350891C2 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| Оптико-электронная система поиска и сопровождения цели | 2017 |
|
RU2664788C1 |
| Командирский прицельно-наблюдательный комплекс | 2015 |
|
RU2613767C2 |
Группа изобретений относится к устройству и способу диагностики параметров лазерного канала управления (ЛКУ) прицельных комплексов. Устройство содержит коллиматор, кронштейн для крепления на объекте, соединительные и информационные кабели, внешний компьютер. Коллиматор содержит корпус с окном для объектива и с размещенными на нем соединительными разъемами и выключателем питания, объектив с переменным фокусным расстоянием, состоящий из неподвижной линзы и подвижной линзы с электроприводом, два спектроделительных зеркала, матричный сенсор с объективом, горизонтальный и вертикальный линейный сенсор, а также содержит блок электроники, включающий плату питания, плату формирования изображений, контроллер управления режимами работы, плату передачи данных. Для проведения контроля параметров ЛКУ осуществляют предварительную юстировку, заключающуюся в совмещении оптических осей объектива и ЛКУ прицельного комплекса, далее производят процесс измерений, сопоставляя моменты появления и исчезновения изображения, его яркости, размеров и положения с заданной временной циклограммой работу ЛКУ и установленными нормативными значениями. Обеспечивается автоматизированное измерение характеристик поля управления и временных параметров циклограммы ЛКУ, а также оценка соответствия полученных результатов установленным нормативам при штатной холостой работе контролируемого изделия без необходимости подключения к контролируемому изделию и остановки циклограммы пуска. 2 н. и 3 з.п. ф-лы, 4 ил.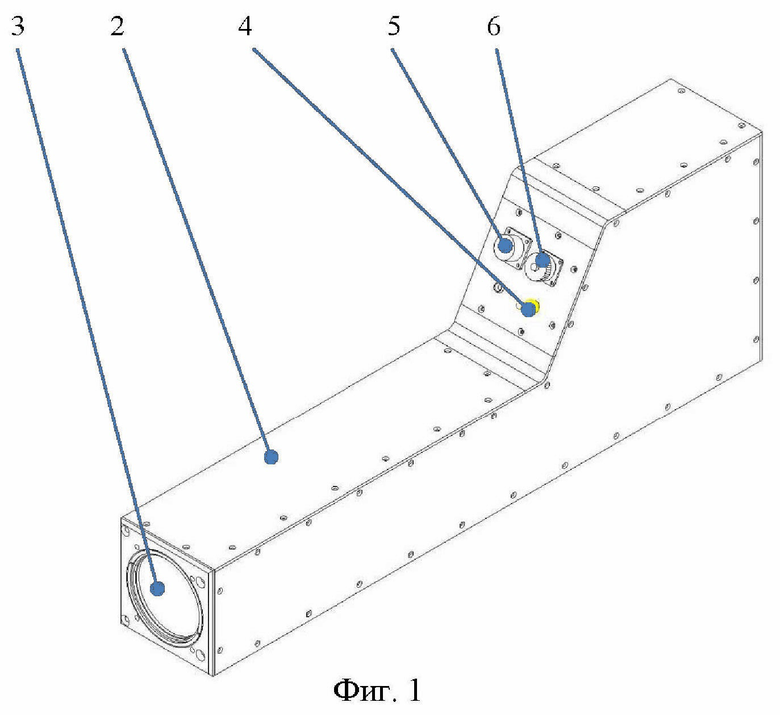
1. Устройство диагностики параметров лазерного канала управления прицельных комплексов, включающее коллиматор, имеющий в составе объектив, первое фотоприемное устройство, с последовательно установленным под углом на оптической оси объектива спектроделителем, ослабитель лазерного излучения, второе фотоприемное устройство и электронное устройство управления, обработки и выдачи измерительной информации на базе программируемого электронного модуля, со входами и выходами для подключения комплектом проводов к контролируемому прибору и внешнему компьютеру, отличающееся тем, что объектив коллиматора устройства выполнен с переменным фокусным расстоянием и состоит из двух линз, одна из которых подвижная с электроприводом, за первым спектроделительным зеркалом расположены ослабитель и объектив первого фотоприемного устройства, выполненного в виде матричного сенсора, расположенного на оптической оси объектива, на оси отраженного от первого спектроделительного зеркала пучка излучения введено еще одно спектроделительное зеркало, располагаемое под углом, с оптически связанными с ним двумя фотоприемными устройствами, выполненными в виде линейных сенсоров высокого разрешения, которые отличаются наличием всего нескольких строк чувствительных пикселей по вертикали и значительного числа пикселей по горизонтали для сенсора, расположенного горизонтально, а для вертикального матричного сенсора характерно наличие всего нескольких строк пикселов по горизонтали и значительного числа пикселей по вертикали, программируемый блок электроники коллиматора выполнен на базе свободно-программируемого контроллера с установленным ПО и включает плату питания, плату формирования изображений, контролер управления режимами работы коллиматора и плату передачи данных на внешний компьютер с установленным ПО, с помощью комплекта соединительных кабелей к входам и выходам коллиматора устройства подключаются источник питания постоянного тока, центральный контакт электроспуска, контакт «масса» контролируемого прибора лазерного прицельного комплекса, контакты кабеля концевого выключателя контроля отката пушки, внешний компьютер.
2. Устройство диагностики параметров лазерного канала управления прицельных комплексов по п. 1, отличающееся тем, что для крепления устройства на выходе контролируемого прибора комбинированного прицела прицельного комплекса используется кронштейн с каретками вертикального и горизонтального перемещения, с винтами регулировки углов разворота коллиматора, для обеспечения согласования оси лазерного канала управления и оптической оси устройства.
3. Способ контроля параметров лазерного канала управления прицельных комплексов, применяемый в устройстве по п. 1, реализуется в полностью автоматическом режиме, при этом ПО устройства и программируемый блок электроники коллиматора устройства обеспечивают самотестирование исправности всех систем устройства и индикацию ошибок в процессе контроля параметров лазерного канала управления прицельного комплекса, и заключается в получении изображений последовательности кадров поля управления и математическом анализе полученных изображений с учетом временной циклограммы работы контролируемого изделия после включения ЛКУ контролируемого изделия, прохождения модулированного параллельного пучка излучения через объектив устройства и попадания части пучка на первое спектроделительное зеркало, которое для разделения пучка установлено под углом к оптической оси объектива, при этом часть пучка излучения, прошедшая через спектроделительное зеркало, фокусируется объективом в плоскости чувствительной площадки матричного сенсора, момент попадания пучка на площадку матричного сенсора является точкой отсчета для измерения временных характеристик ЛКУ, когда в процессе работы ЛКУ изображение поля управления изменяет размер и положение относительно оптической оси коллиматора, происходит определение величины интегральной яркости изображения, что обеспечивает измерение мощности излучения ЛКУ, при этом ПО устройства на основе сопоставления моментов появления и исчезновения изображения, его яркости, изменения размеров и положения, с временной циклограммой работы ЛКУ и установленными нормативными значениями выдает заключение о соответствии или отклонении измеренных параметров от нормативов в таблице протокола, а вторая часть пучка отражается от спектроделительного зеркала и, в свою очередь, делится вторым спектроделительным зеркалом на две части, при этом первая часть попадает на линейный сенсор, установленный параллельно вертикальной оси поля управления, а второй на линейный сенсор, установленный параллельно горизонтальной оси поля управления, что обеспечивает построчное сканирование изображения поля управления в вертикальной и горизонтальной плоскости, в дальнейшем плата формирования изображений собирает строки в полноценное изображение нескольких последовательных кадров поля управления и передает его в контролер управления режимами работы коллиматора устройства с установленным ПО, после математической обработки полученных кадров вычисляются частоты модуляции и коэффициенты команд во множестве точек поля управления, одновременно происходит сравнение с нормативными значениями и формируется команда с заключением о соответствии или отклонении измеренных параметров от нормативов в таблице протокола через плату передачи данных.
4. Способ по п. 3, отличающийся тем, что измерение всех требуемых характеристик ЛКУ производится за два цикла работы ЛКУ, при этом подвижная линза объектива коллиматора в первом цикле перемещается в процессе измерений для удержания фокусировки изображения на матричном сенсоре, а во втором цикле занимает фиксированное положение, обеспечивающее наибольший размер поля управления на линейных сенсорах.
5. Способ по п. 3, отличающийся тем, что обеспечивается контроль любых ЛКУ прицельных комплексов только за счет изменения настроек устройств коллиматора и алгоритма анализа изображений поля управления в ПО.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО КАНАЛА УПРАВЛЕНИЯ | 2007 |
|
RU2350891C2 |
| Способ литья изделий из диабаза и т.п. | 1948 |
|
SU83835A1 |
| СПОСОБ ПОЛУЧЕНИЯ БИОСТОЙКОГО БИТУМА | 0 |
|
SU162443A1 |
| DE 3644101 A1, 09.07.1987 | |||
| US 20050150121 A1, 14.07.2005 | |||
| US 5052800 A1, 01.10.1991 | |||
| US 20210055536 A1, 25.02.2021. | |||

