Изобретение относится к области систем управления и силовой преобразовательной техники. Оно может быть использовано для управления силой тяги электровозов однофазно-постоянного тока в зависимости от условий движения с реализацией необходимой жесткости тяговых характеристик электродвигателей и может быть применено в транспортной отрасли, отрасли железнодорожного машиностроения и электротехнической промышленности. Способ управления представляет собой комплекс алгоритмов управления электровозом с новым схемотехническим решением электропривода, обеспечивающих возможность управления электровозом на основе характеристик постоянства силы тяги или постоянства мощности.
Аффинной системой электропривода электровоза к заявленному изобретению по ряду признаков является способ управления, в котором обмотки возбуждения тяговых электродвигателей (ТЭД) в режиме тяги питаются от автономного источника [1, 2].
Уровень техники
Известен способ управления электрическим приводом электровоза по характеристике постоянства силы тяги, при котором вращающий момент регулируется путем изменения напряжения на якоре тягового электрического двигателя (ТЭД), а ток возбуждения устанавливается постоянным во всем диапазоне вращения якорей от нуля до предельного значения, ограниченного номинальной мощностью ТЭД. При увеличении частоты вращения якоря выше этого предельного значения, электропривод электровоза переводят на характеристику постоянства мощности с уменьшением токов возбуждения обратно пропорционально частоте вращения так. Управление таким электрическим приводом выполняется микропроцессорной системой (МПСУ) через индивидуальные выпрямительно-инверторные тиристорные преобразователи (ВИП), питающие каждый ТЭД, а также через выпрямительную обмотку возбуждения (ВУВ), питающую последовательно включенные обмотки возбуждения ТЭД. Электропривод одной секции такого электровоза содержит четыре тяговых электродвигателя (ТЭД), якоря которых индивидуально подключены к каждому ВИПу, а также четыре обмотки возбуждения, включенных последовательно и подключенных к блоку ВУВ [3].
В качестве прототипа выбран электрический привод электровоза ЗЭС5К с поосным управлением силой тяги с последовательным и независимым возбуждением тяговых электродвигателей. Этот привод содержит микропроцессорную систему управления и диагностики (МСУД), реализующую функции управления приводом электровоза, как в автоматическом, так и в ручном режиме. В силовой электрической схеме одной секции электровоза имеются тяговый трансформатор, подключенные к нему четыре тиристорных выпрямительно инверторных преобразователя типа ВИП-4000-2М, индивидуально управляющих каждым ТЭД, а также индивидуальные (подключенные последовательно к каждому якорю ТЭД) сглаживающие реакторы PC 19-01 (CP). Кроме того, к трансформатору подключена выпрямительная установка возбуждения с нулевым выводом (ВУВ-24-01), питающая обмотки возбуждения четырех ТЭД, включенные последовательно в режиме тяги и рекуперации на каждой секции электровоза. Переключение силовой схемы с целью перехода с независимого возбуждения ТЭД на последовательное и обратно производится с размыканием силовой электрической схемы кулачковым двухпозиционным тормозным переключателем типа ПКД-01 [4], что приводит к потере силы тяги электровоза и является общими недостатками известного технического решения и прототипа.
В предложенной схеме прототипа все обмотки возбуждения включены последовательно, подключены к одному источнику питания ВУВ 24-01 и зашунтированы тиристорами отпитки с последовательно включенными резисторами. В результате этого не обеспечивается реализация максимально эффективных режимов тяги и рекуперации.
В рекуперации для выравнивания токов якорей, последовательно с ними включен блок балластных резисторов. В тяговом режиме блок балластных резисторов не включается, а выравнивание токов якорей производится за счет индивидуального управления ВИПами. При этом управление токами возбуждения шунтирующими тиристорами производится в ограниченном диапазоне из-за особенностей свойств применяемых силовых полупроводниковых приборов.
Кроме того, наличие у прототипа индивидуальных сглаживающих реакторов в цепи индивидуального питания каждого якоря от отдельного ВИПа (блочная система) приводит к тому, что повышается вероятность перехода срыва сцепления колесной пары в разносное буксование. Это вызвано снижением в 2 раза величины индуктивности L сглаживающего реактора по сравнению с типовой схемой питания двух ТЭД от одного ВИПа на электровозе 2ЭС5К. Такое снижение L вызывает соответствующее снижение эдс самоиндукции eси= -LdI/dt, величина которой становится недостаточной для предотвращения разносного буксования [6].
Невозможность непрерывного и плавного управления токами возбуждения ТЭД обусловлена еще тем, что в прототипе при переходе, например, из режима последовательного возбуждения в режим независимого возбуждения ТЭД, возникает необходимость размыкания электрической цепи тормозным переключателем. Это происходит при движении на подъем со снижением скорости ниже 60 км/ч и выполняется путем размыкания силовой схемы отдельно каждой секции электровоза для перевода в режим независимого возбуждения ТЭД. Такое размыкание сопровождается резким снижением на 150-200A тока, потребляемого электровозом, и потерей силы тяги, что не желательно [7].
Известен прототип микропроцессорного контроллера машиниста (КМБ2) электровоза ЭП20, имеющего два полукомплекта, дублированного 32-х разрядного микропроцессора фирмы NEC [8]. В схеме КМБ2 имеются две шины данных CAN2.0B, со скоростью обмена данными 1 Мбит/с, которые по CAN-протоколу подключены к основному блоку управления - микропроцессорной системе управления и диагностики (МСУД), объединяющей в единую бортовую вычислительную сеть электровоза различные исполнительные устройства, датчики и т.п., необходимые для управления электровозом (фиг. 1) [9]. Контроллер и микропроцессорная система управления и диагностики (МСУД) включаются при включении аккумуляторной батареи электровоза.
Управление КМБ2 начинается с того, что машинист вставляет в замок КМБ2 индивидуальную карточку-ключ (ключ) 7 (фиг. 1) с надписью «вперед» на лицевой стороне и «назад» на оборотной стороне. При этом обеспечивается идентификация и сборка электрической схемы для заданного направления движения электровоза. Корпус ключа имеет отверстия для электромеханической блокировки и невозможности его извлечения при включенных режимах управления электровозом. При отсутствии ключа работа КМБ2 блокируется и команды при перемещении рукоятки-манипулятора 2 и нажатии кнопки «СБРОС» 3 на МСУД не выдаются.
На лицевой панели КМБ (фиг. 1) имеются следующие органы управления:
- замок для ключа идентификации и выбора направления движения 1;
- рукоятка-манипулятор управления 2;
- кнопка «СБРОС» с кольцевой подсветкой 3;
- «АТ» - режим «Аварийное торможение» пятое положение рукоятки-манипулятора управления 2;
- комплект индикаторов, отображающий реакцию системы управления на действия машиниста по заданию алгоритмов управления.
При этом рукоятка-манипулятор 2, перемещается в одно из пяти положений с автоматическим возвратом в нейтральное положение 0:
1) нейтральное «0» соответствует фиксации выбранного режима работы;
2) вправо от машиниста - позиция «V+» - увеличение заданного значения скорости задатчика скорости для выполнения алгоритмов автоматического управления, когда автоматическое управление включено;
3) влево от машиниста - позиция «V-» - уменьшение заданного значения скорости задатчика скорости для выполнения алгоритмов автоматического управления, когда автоматическое управление включено;
4) вверх от машиниста - позиция «F+/F-» -увеличение силы тяги при выборе режима движения в тяге, снижение силы торможения при выборе режима движения в рекуперативном торможении;
5) вниз от машиниста - позиция «F-/F+» - снижение силы тяги при выборе режима движения в тяге, увеличение силы торможения при выборе режима движения в рекуперативном торможении;
6) при установке рукоятки - манипулятора 2 вправо и вниз к машинисту в положение «АТ» - включается режим «Аварийное торможение».
При этом для начала движения и достижения заданной скорости после выставления на мониторе МПСУ необходимого значения скорости и поддержания ее в автоматическом режиме, рукоятку 2 необходимо перевести в положение вперед от машиниста к верхним индикаторам «F+/F-» и удерживая ее в крайнем положении выставить необходимое значение силы тяги.
Если значение скорости задавалось при взятии поезда с места, то движение поезда начнется после перемещения крана вспомогательного тормоза локомотива в положение отпуска. Переход в режим выбега с последующим включением тормозного режима « р» происходит автоматически при превышении заданного значения скорости.
На лицевой панели КМБ2 (фиг. 1) представлены индикаторы, отображающие действия машиниста или системы автоматического управления в виде следующих показаний, при активности обозначенных на фиг. 1 желтым цветом:
1. При вставленном в замок ключе идентификации и выбора направления движения 1 с читаемой надписью «ВПЕРЕД» или «НАЗАД» загорается соответствующий индикатор обозначающий <↑>- направление движения «ВПЕРЕД» или <↓>- направление движения «НАЗАД» при этом рукоятка-манипулятор без воздействия машиниста всегда находится в нейтральном положении «0».
2. Вверху «F+/F-» - показывают положение увеличения силы тяги при выборе режима движения в тяге, снижение силы торможения при выборе режима движения в рекуперативном торможении;
3. Внизу «F-/F+» - показывают положение снижения силы тяги при выборе режима движения в тяге, увеличение силы торможения при выборе режима движения в рекуперативном торможении; рукоятки манипулятора для набора значений тягового тока или снижения тормозного тока
4. «т» - индикатор режима тяги;
5. «р» - индикатор режима рекуперации;
6. Нейтральное «0» соответствует фиксации выбранного режима работы;
7. «0» - режим фиксации, показывает при горящих индикаторах «т» или «р», рукоятка-манипулятор находится в нейтральном положении;
8. «0» - режим выбега, показывает при погасших светодиодных индикаторах «т» или «р», рукоятка-манипулятор находится в нейтральном положении;
9. «V+» - набор заданной величины скорости движения при автоматическом управлении;
10. «V-» - снижение заданной величины скорости движения при автоматическом управлении;
11. «↑»- индикатор направления движения «ВПЕРЕД»;
12. «↓» - индикатор направления движения «НАЗАД»;
13. горизонтальный индикатор «СКОРОСТЬ» показывает заданную скорость движения;
14. Верхний вертикальный индикатор справа показывает значение силы тяги и дискретное ее увеличение или снижение;
15. Нижний вертикальный индикатор справа показывает заданное значение силы торможения и дискретное ее увеличение или снижение.
Раскрытие изобретения
Техническая проблема, на решение которой направлено изобретение, заключается в повышении эффективности электрического привода электровоза на основе применения новой силовой электрической схемы, а также новых системы и алгоритмов управления электроприводом.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности индивидуального, непрерывного и плавного (без размыкания силовой цепи) управления токами возбуждения тяговых электродвигателей электровоза с реализацией тяговых характеристик постоянства силы тяги или постоянства мощности.
Существо изобретения заключается в следующем.
В ранее выполненных работах [7, 11, 12, 13] были рассмотрены силовая схема электровоза однофазно постоянного тока с выпрямительно-инверторными преобразователями (ВИП) на тиристорах, питающими по два тяговых электродвигателя двигателя (ТЭД) каждой тележки, и индивидуальными преобразователями возбуждения (УПВ) на транзисторах, шунтирующими обмотки возбуждения каждого ТЭД.
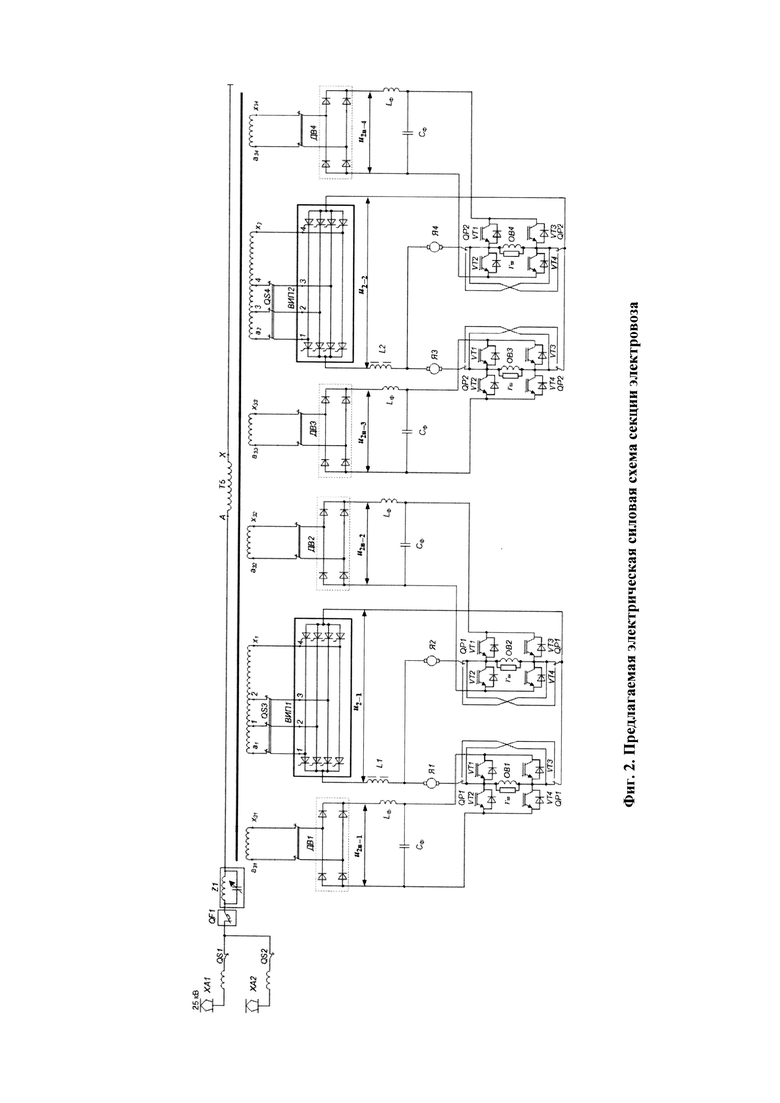
В соответствие с этой схемой электрический привод электровоза (фиг. 2) содержит тяговый трансформатор T5, первичная обмотка A-X которого подключена к независимому источнику питания. Подключение первичной обмотки трансформатора обеспечивается посредством токоприемников ХА1 или ХА2, через разъединитель или QS2 соответственно, главный выключатель QF1 и фильтр Z1. К вторичным обмоткам тягового трансформатора a1-x1 и а2-x2 подключены параллельно два ВИП соответственно, обозначенных как ВИП1 и ВИП2
К ВИП1 через сглаживающий реактор L1 подключены параллельно якоря ТЭД, обозначенные как Я1, -Я2 и обмотки возбуждения ОВ1 и ОВ2 К ВИП2 через сглаживающий реактор L2 также параллельно подключены якоря ТЭД, обозначенные как Я3, Я4 и обмотки возбуждения ОИ3 и ОВ4 этих ТЭД. В схеме предусмотрены четыре индивидуальных вторичных обмотки тягового трансформатора a31-х31, a32-х32, а33-х33 и а34-х34 на напряжение 45В каждая, к которым подключены четыре индивидуальных диодных выпрямительных установки возбуждения ВУВ, как источники питания. Каждая из ВУВ выполнена в виде мостового диодного выпрямителя, к выходам которой через Lф-Сф фильтры подключены средства шунтирования. Средства шунтирования, выполнены в виде индивидуальных транзисторных управляемых преобразователей возбуждения (УПВ1-4), содержащих вентили VT1-VT4, которые шунтируют индивидуально каждую обмотку возбуждения ТЭД OB1, OB2, OB3, OB4. Кроме того, обмотки возбуждения имеют постоянное шунтирующее сопротивление rш.
Реверсирование движения выполняется групповыми переключателями QP1 и QP2 [10].
В этой схеме отсутствуют тормозные переключатели, балластные резисторы, тиристоры ослабления возбуждения и выпрямители типа ВУВ, питающие обмотки возбуждения. Вместо этих элементов предусмотрены четыре индивидуальные обмотки трансформатора на напряжение 45B, питающие УПВ1-4 через диодные выпрямители и LС - фильтры, а также сами транзисторные управляемые преобразователи УПВ 1-4, выполненные каждый на четырех транзисторах VT1-VT4. Для управления такой силовой схемой, разработаны следующие принципы.
Принцип управления №1
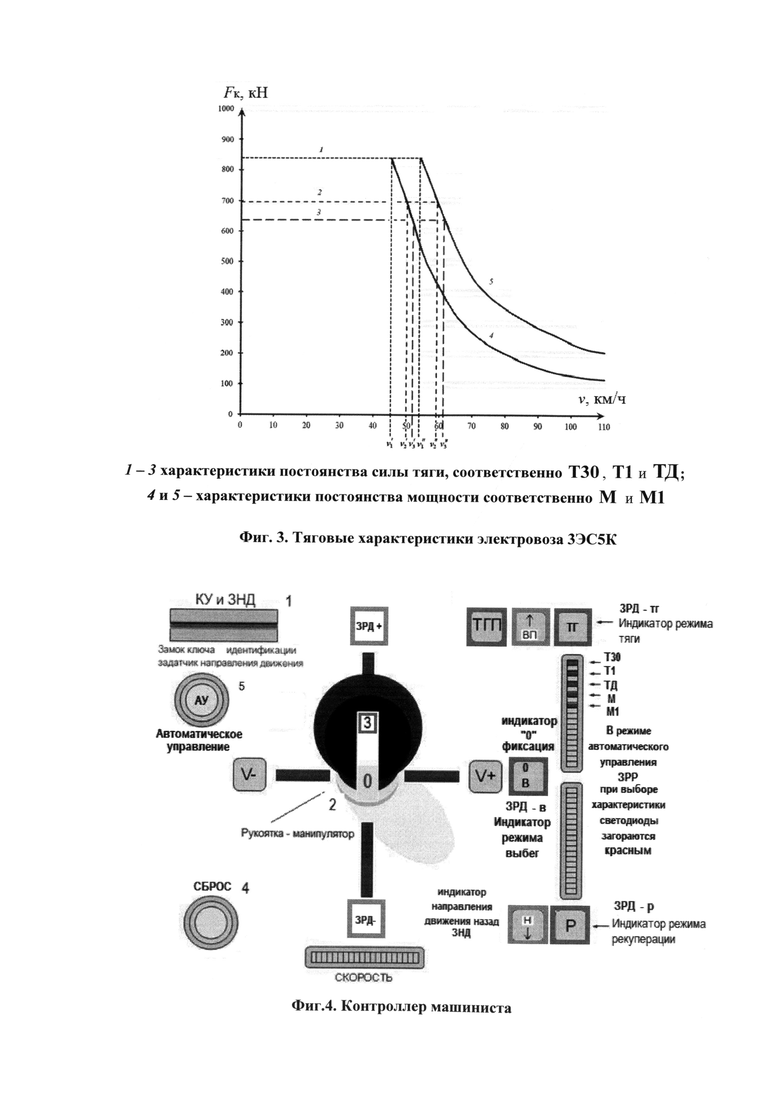
Трогание и разгон поезда выполняются по характеристикам постоянства силы тяги (независимое возбуждение) при максимально возможных значениях тока возбуждения ТЭД, с плавным увеличением токов двигателей. При этом с учетом шунтирования обмоток возбуждения сопротивлениями rш (см. фиг. 2) следует задавать наибольшее возможное значение тока независимого возбуждения IB=0,98Iд, соответствующее выбранной характеристике тридцатиминутного Т30, часового Т1 или длительного ТД режимов движения (фиг. 3) и плавно увеличивать токи двигателей Iд.
Это объясняется тем, что мощность, рассеиваемая на обмотке возбуждения  , составляет всего 5% от мощности ТЭД. Тогда токи Iд будут наименьшими из возможных, необходимых для получения заданного значения силы тяги ТЭД
, составляет всего 5% от мощности ТЭД. Тогда токи Iд будут наименьшими из возможных, необходимых для получения заданного значения силы тяги ТЭД  , и расход электроэнергии на тягу поездов будет минимальным.
, и расход электроэнергии на тягу поездов будет минимальным.
Если в процессе разгона поезда скорость его движения νф возрастет до уровня, при котором будет выполняться условие (1)

то необходимо будет перейти на характеристики постоянства мощности М или M1 при последовательном возбуждении ТЭД.
Принцип управления №2.
Второй принцип заключается в том, что при трогании и разгоне поезда электровоз последовательно вовлекает в движение вначале один, потом два вагона и т.д. [7, 10, 11, 12, 13]. Поэтому ускорение электровоза ограничено величиной аэ=0,17g. Для реализации такого режима трогания необходимо, чтобы вначале включалась в работу одна тележка электровоза, т.е. один ВИП, питающий два ТЭД, при условии плавного нарастания тока этих двигателей до наибольшей возможной величины, заданной соответствующей характеристикой Т30, Т1 и ТД. Затем должен включаться в работу второй ВИП и т.д. до включения всех ВИПов электровоза и, следовательно, всех ТЭД.
Этот принцип определяет выбор очередности включения ВИПов, а, следовательно, и ТЭД электровоза, который обусловлен следующим. При трогании с места реакция состава, равная силе тяги электровоза Fк, приложена к кузову каждой секции через автосцепки, расположенные на расстоянии ниже центра масс кузова. Из-за этого создается момент M=Fкhа поворачивающий кузов и вызывающий в режиме тяги разгрузку передних и догрузку задних тележек. Кроме того, такое же изменение вертикальных нагрузок колесных пар возникает при развитии вращающего момента ТЭД из-за действия реакций, передаваемых от остовов двигателей через подвески на рамы тележек. В режиме рекуперации будут разгружаться задние и догружаться передние колесные пары.
В связи с этим задние колесные пары в режиме тяги и передние в режиме рекуперации находятся в лучших условиях сцепления колес с рельсами и могут реализовать большую силу тяги. Опыт эксплуатации показал, что такое увеличение реализуемой силы тяги для двухосных тележек может составить до 15%. В то же время разгруженные передние тележки реализуют силу тяги на 15% меньшую, чем задние. Однако в целом сила тяги двух тележек будет равна расчетной силе тяги секции электровоза.
При этом можно считать, что первая ось первой тележки каждой секции электровоза (первый ТЭД) реализует силу тяги, меньшую на 10%, вторая ось (второй ТЭД) реализует силу тяги, меньшую на 5%. Тогда третий и четвертый ТЭД реализуют силы тяги на 5% и 10% большие, чем сила тяги секции электровоза.
Для реализации принципов и алгоритмов управления предложенной силовой схемы (фиг. 2) разработано новое решения пульта управления машиниста ПУМ, которое отличается от прототипа (КМБ2) порядком работы рукоятки - манипулятора, а также другим программным обеспечением микроконтроллера ПУМ. Вид лицевой панели этого ПУМ (фиг. 4), показывает, что эта панель так же, как и прототип, имеет следующие органы управления:
- замок ПУМ для карточки-ключа (ключ) КУ1, который при вставлении в замок обеспечивает идентификацию, сбор схемы и задание направления движения, т.е. выполняет функции ключа управления и задатчика направления движения ЗНД электровоза в зависимости от положения ключа с надписью «вперед» на лицевой стороне и «назад» на оборотной стороне;
- рукоятку-манипулятор управления 2, которая может быть переведена в одно из 4 положений с автоматическим возвратом в нейтральное положение 0;
- кнопку «3» с подсветкой 3, обеспечивающую режим блокировки и разблокировки для перемещения рукоятки - манипулятора 2;
- кнопку «СБРОС» с кольцевой подсветкой 4, обеспечивающую быстрый сброс позиций, набранных рукояткой-манипулятором 2;
- кнопку «АУ» 5 (автоматическое управление), обеспечивающую переключение режимов ручного или автоматического управления режимами МСУД и работы электровоза; кнопка имеет кольцевую подсветку обозначающих режим работы, автоматический или ручной.
- комплект индикаторов.
При этом рукоятка управления 2, перемещается в четырех направлениях:
1) нейтральное «0» соответствует фиксации выбранного режима работы;
2) вправо от машиниста - позиция «V+» - увеличение заданного значения скорости задатчика скорости  для выполнения алгоритмов автоматического управления кнопка АУ включена;
для выполнения алгоритмов автоматического управления кнопка АУ включена;
3) влево от машиниста - позиция «V-» - уменьшение заданного значения скорости  задатчика скорости ЗС для выполнения алгоритмов автоматического управления, когда кнопка АУ включена;
задатчика скорости ЗС для выполнения алгоритмов автоматического управления, когда кнопка АУ включена;
4) вверх от машиниста - позиция «ЗРД+» - выбор режима движения в автоматическом режиме, когда кнопка АУ включена или установка величины тока ТЭД, когда кнопка АУ выключена;
5) вниз от машиниста - позиция «ЗРД-» - сброс выбранного режима движения в автоматическом режиме, когда кнопка АУ включена или уменьшение величины тока ТЭД, когда кнопка АУ выключена;
6) при установке рукоятки манипулятора 2 в нулевое положение, кнопка фиксатора 3 включается автоматически; для нового перемещения рукоятки 2 необходимо предварительно нажать кнопку 3.
Если кнопка 4 АУ выключена, то при первом кратковременном перемещении рукоятки 2 вверх от машиниста устанавливается заданное значение тока 50А и при возврате в нулевое положение этой рукоятки величина Iдз фиксируется. При повторном перемещении рукоятки 2 вверх от машиниста устанавливается новое заданное значение тока 100A и при возврате в нулевое положение этой рукоятки величина Iдз фиксируется.
Дальнейшие повторные кратковременные перемещения рукоятки 2 вверх и вниз обеспечат установку Iдз в диапазоне от 50 до 1000A, причем последнему, двадцатому перемещению будет соответствовать режим движения ТГП позиции ЗРД.
Если в этом режиме (кнопка 4 АУ выключена) перемещение рукоятки 2 вверх от машиниста и удержание ее в этом положении вызывают быстрое увеличение заданных значений тока Iдз, а перевод рукоятки 2 вниз от машиниста и удержание ее в этом положении, вызовет быстрый сброс Iдз.
Трогание поезда с места с заданным током Iдз выполняется после перемещения крана вспомогательного тормоза машиниста в положение отпуска. Переход из режима движения в режим выбега происходит при перемещении рукоятки 2 вниз от машиниста и удержание ее в этом положении.
Если кнопка 4 АУ включена, то при первом кратковременном перемещении рукоятки 2 вверх от машиниста в положение «ЗРД+», устанавливается режим движения M1, который фиксируется при возврате рукоятки 2 в нулевое положение. Последующие кратковременные перемещения рукоятки 2 в это положение и возвраты в «0», обеспечат переходы на характеристики М, ТД, Т1 и Т30.
Для обратного перехода от характеристики Т30 до Ml необходимо кратковременно переводить рукоятку 2 в положение «ЗРД-» и возвращать ее в «0» для фиксации. Если рукоятку 2 длительно удерживать в положении «ЗРД-» и потом возвратить ее в «0» для фиксации, то установится режим движения - выбег «В». Далее для перехода в режим - рекуперация «р» надо снова перевести рукоятку 2 в положение «ЗРД-».
Для трогания поезда с места необходимо рукоятку 2 кратковременно переместить вправо от машиниста в положение «V+» и вернуть в положение «0» для фиксации. При этом установится выбранное значение заданной скорости движения Повторно перемещая вправо и возвращая в «0» рукоятку 2, можно увеличивать заданное значение скорости на одну дискрету 5 км/ч. Если рукоятку 2 длительно удерживать в положении «V+», а потом переместить в «0», то установится максимальное значение заданной скорости - Движение поезда начнется после перемещения крана вспомогательного тормоза локомотива в положение отпуска.
Если рукоятку 2 кратковременно переместить влево от машиниста в положение «V-» и вернуть в положение «0» для фиксации, то произойдет снижение скорости на одну дискрету, т.е. на 5 км/ч. Если эту рукоятку длительно удерживать в положении «V-» и вернуть ее в положение «0», то заданная скорость станет равна нулю и электровоз перейдет в режим выбега.
Если рукоятка 2 установлена в положение «0» при режиме «р», а затем ее перемещать в положения «V+» или «V-», то можно выполнить выбор заданной скорости движения для режима рекуперации также как и для режима тяги.
Если кнопка 4 АУ включена, выполнен выбор заданной скорости движения, который фиксируется при возврате рукоятки 2 в нулевое положение, то последующие переходы на характеристики Т30, Т1, ТД, М и M1 происходят в автоматическом режиме. Режимам работы Т30, Т1, ТД соответствуют значения сил тяги секции электровоза Fкс. и токов ТЭД  , приведенные в таблице 1.
, приведенные в таблице 1.
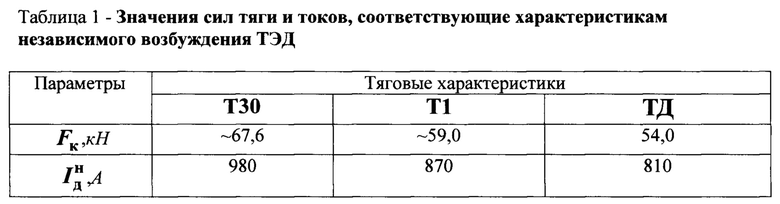
Значения токов  , соответствующие токам ТЭД при работе на характеристиках последовательного соединения М и Ml можно получить пересчетом сил тяги по характеристике Fк.
, соответствующие токам ТЭД при работе на характеристиках последовательного соединения М и Ml можно получить пересчетом сил тяги по характеристике Fк.  .
.
На лицевой панели ПУМ (фиг. 4) имеются индикаторы, отображающие действия машиниста или системы автоматического управления в виде следующих показаний, загорающихся в активном состоянии (фиг. 4):
1. «ЗРД+»- показывают положения рукоятки манипулятора для набора значений тягового тока или снижения тормозного тока
2. «ЗРД-» снижение тягового тока и увеличения тормозного тока в режиме рекуперации;
3. «тг» - режим тяги;
4. « ТГП » - максимальный режим тяги;
5. «в-0» - режим выбега при погасших индикаторах «тг» и «р», рукоятка-манипулятор находится в нейтральном положении;
6. «0» - режим фиксации, показывает при горящих индикаторах «тг» или «р», рукоятка-манипулятор находится в нейтральном положении;
7. «р» - режим рекуперации;
8. «V-» - снижение величины уставки скорости движения;
9. «V+» - набор величины уставки скорости движения;
10. «↑вп» - направление движения «ВПЕРЕД»;
11. «↓н»- направление движения «НАЗАД».
12. горизонтальный индикатор «СКОРОСТЬ» показывает заданную скорость движения;
13. верхний вертикальный индикатор справа показывает значение тягового тока и режим работы в соответствии с заданными характеристиками при включенном режиме автоматического управления;
14. нижний вертикальный индикатор справа показывает заданное значение тормозного тока.
При выборе направления движения ключом 1 на панели ПУМа загорается желтым цветом выбранное направление движения: вперед «↑» - «ВП» или назад «↓» - «Н».
При первом кратковременном перемещении рукоятки 2 вверх от машиниста в положение «ЗРД+», гаснет желтый индикатор «в-0», загорается желтый индикатор режима тяги «тг» и его синяя светодиодная подсветка. На светодиодном индикаторе справа вверху загорится светодиод с одновременным обозначением на МПСУ значение тягового тока. С каждым кратковременным перемещением в положение «ЗРД+» загорается дискретно один желтый светодиод на шкале и на дисплее МПСУ добавляется по 50А, с указанием суммарного, нарастающего значения тока. Кратковременным перемещением или удержанием в положение « ЗРД+» до предельного набора значения тягового тока, после чего загорится желтый индикатор «ТГП» с синей светодиодной подсветкой.
При постановке в «0» для фиксации значения тока загорается желтый индикатор «В-0» и синяя светодиодная подсветка.
Если кратковременно перемещать рукоятку 2 вниз к машинисту в положение «ЗРД-», то гаснет дискретно по одному желтому светодиоду на шкале и на дисплее МПСУ будет отображаться заданное значение тягового тока, снижающееся каждый раз на 50А. При снижении тягового тока кратковременным перемещением или удержанием рукоятки 2 в положение «ЗРД-» показания индикатора на шкале и на экране МПСУ снижаются до нулевого значения тягового тока, после чего индикатор «тг» гаснет и загорается индикатор выбега «в-0».
При дальнейшем кратковременном перемещении рукоятки 2 вниз к машинисту в положение «ЗРД-», гаснет индикатор «в-0», загорается желтый индикатор режима торможения «р». На светодиодном индикаторе справа внизу загорится желтый светодиод с одновременным обозначением на МПСУ значения тормозного тока.
При увеличении тормозного тока с каждым кратковременным перемещением в положение «ЗРД-» обозначается желтой светодиодной подсветкой и дополнительно загорается дискретно по одному желтому светодиоду на шкале справа, при каждом перемещении рукоятки изменяется значение тормозного тока отображаемого на дисплее МПСУ. При постановке в «0» происходит фиксация значения тока и загорается желтый индикатор «в-0».
При снижении тормозного тока кратковременным перемещением или удержанием в положение «ЗРД+» обозначается желтой светодиодной подсветкой и показания индикатора на шкале и на экране МПСУ снижаются по 50А до нулевого значения тормозного тока, синяя светодиодная подсветка и индикатор «р» гаснет и загорается синяя светодиодная подсветка индикатора выбега «в-0».
При кратковременном перемещении или удержанием рукоятки 2 в положении « ЗРД+» до предельного набора значения тягового тока, загорится желтый индикатор и синяя светодиодная подсветка « ТГП ».
При активации кнопки 4 АУ включается синяя светодиодная подсветка этой кнопки. Далее, перемещая рукоятку 2 вверх от машиниста в положение «ЗРД+» режимы движения M1, М, ТД, Т1 и Т30, устанавливаются последовательно. Переключение по устанавливаемым характеристикам с соответствующим буквенным обозначением с красным светодиодом на шкале справа, вверху и отображается текстовой информацией на дисплее МПСУ.
Обозначение перехода по характеристикам на индикаторной шкале от характеристики Т30 до M1 происходит в обратной последовательности, так же с подтверждением на экране МПСУ, либо в произвольном порядке в зависимости от выбора системой автоматического управления оптимальной характеристики.
ПУМ ориентирован на использование микропроцессоров и чипов-коммутаторов, поддерживающих современные и перспективные стандарты передачи данных, обеспечивающих необходимый уровень синхронизации в реальном масштабе времени с МСУДом и другими системами автоматического управления [14].
Подготовка локомотива к движению после нахождения на путях отстоя в отключенном состоянии выполняют в следующей, описанной ниже последовательности.
После включения аккумуляторной батареи выполняются обычные действия: зарядка сжатым воздухом главных резервуаров от базового компрессора; подъем токоприемника; включения главного выключателя и основного компрессора; включение пневматической блокировки обеспечивающей контроль управления пневматическими тормозами из кабины управления; зарядки питательной и тормозной магистрали, с наполнением тормозных цилиндров сжатым воздухом до максимального значения. После этого можно управлять тормозами, меняя значение давления сжатого воздуха в тормозных цилиндрах электровоза краном вспомогательного тормоза машиниста или (в роли повторителя) через основной кран машиниста. Далее включение карточки-ключа КУ обеспечивает идентификацию кабины управления и контроль управления двух кабинного электровоза. Затем выполняют отключение механического ручного или стояночного тормоза, убирают тормозные башмаки для дальнейшего передвижения по заданному маршруту следования.
Отметим также, что установка рукоятки-манипулятора 2 в одну из перечисленных ранее позиций выполняется перед началом движения электровоза. Трогание электровоза с места происходит только после появления на дисплее значения заданных токов двигателей и токов возбуждения и перевода рукоятки-манипулятора в позицию ЗС выбранной скорости движения, а также перевода крана вспомогательного тормоза машиниста в положение отпуска.
Начало движения на действующем (рабочем) локомотиве производится после отпуска тормозов в поезде, которое выполняется перемещением крана вспомогательного тормоза в положение отпуска, после остановки поезда (локомотива) с наполнением тормозных цилиндров электровоза до максимального значения давления сжатого воздуха, краном вспомогательного тормоза для фиксации (локомотива) поезда на остановке.
Очередность включения позиций рукоятки-манипулятора, давление воздуха в тормозной системе поезда и наполнение воздухом тормозных цилиндров электровоза, положение ручек кранов машиниста, контролируется микропроцессорной системой управления.
Рассмотрим алгоритмы управления электровозом, реализуемые микроконтроллером ПУМ при различных позициях рукоятки-манипулятора, например, ЗНД - в положение ВП и ЗРД - в положение ТГ. Тогда в работу, в соответствие с приведенными выше принципами управления, должны поочередно включаться следующие тележки и ТЭД: вначале шестая тележка (ТЭД №12 и 11), затем четвертая (ТЭД №7 и 8), вторая (ТЭД №4 и 3), после этого пятая (ТЭД №10 и 9), третья (ТЭД №5 и 6) и, наконец, первая (ТЭД №1 и 2). Такой же порядок включения тележек и ТЭД будет соответствовать и позициям ЗНД - Н и ЗРД - р.
Другая очередность включения тележек и ТЭД будет соответствовать позициям ЗНД - Н и ЗРД - ТГ или ЗНД - ВП и ЗРД - р. При этом вначале должна включаться первая тележка (ТЭД №1 и 2), затем третья (ТЭД №5 и 6), пятая (ТЭД №9 и 10), вторая (ТЭД №3 и 4), четвертая (ТЭД №7 и 8) и шестая (ТЭД №11 и 12). Если же ЗНД установлена в положение ВП и ЗРД в положение ТГП, то в работу одновременно включаются все ТЭД электровоза, чтобы развить наибольшую силу тяги.
При определении сил тяги Fкзi отдельных ТЭД в соответствие с третьим принципом управления необходимо выполнить следующие соотношения:

где Fко=0,25Fкс - среднее значение силы тяги одного ТЭД электровоза, а Fкс=Fкэ/3 - сила тяги одной секции трех секционного электровоза, соответствующая заданной тяговой характеристике.
Так, например, для характеристики Т30 эти значения будут равны:

Заметим, что принятые в (2) коэффициенты требуют уточнения для учета влияния разброса диаметров бандажей колесных пар. Кроме того, их величины изменяются по сигналам, поступающим от автоматического регулятора сцепления, который в данной работе не рассматривается.
Рассмотрим электромагнитные процессы реализации заданных токов ТЭД, а также электромеханические процессы формирования сил тяги. Процессы трогания и разгона поезда будут предметами отдельного рассмотрения. Определим токи ТЭД, обеспечивающие реализацию приведенных в (3) значений сил тяги для одной секции
электровоза. Для этого примем, что рукоятками управления ПУМ задан следующий
режим работы электровоза: В П, ТГ, Т30.
С учетом этого, найдем заданные значения токов для каждого ТЭД, соответствующие приведенным в (3) заданным величинам сил тяги ТЭД Fкзi. Поскольку эти силы тяги для ТЭД №3 и 4 превышают величину Fко≈67,6кН допустимую по характеристике Т30 для одного ТЭД, то их реализация потребует снижения длительности работы на этой характеристике. Для того чтобы это снижение длительности работы было наименьшим, будем находить величины токов
для каждого ТЭД, соответствующие приведенным в (3) заданным величинам сил тяги ТЭД Fкзi. Поскольку эти силы тяги для ТЭД №3 и 4 превышают величину Fко≈67,6кН допустимую по характеристике Т30 для одного ТЭД, то их реализация потребует снижения длительности работы на этой характеристике. Для того чтобы это снижение длительности работы было наименьшим, будем находить величины токов из условия минимума суммарных потерь мощности
из условия минимума суммарных потерь мощности  , которые складываются из потерь в обмотке возбуждения
, которые складываются из потерь в обмотке возбуждения и в обмотке якоря
и в обмотке якоря при ограничении на силу тяги Fкзi
при ограничении на силу тяги Fкзi

где rя и rв- сопротивления цепей якоря и возбуждения: rя=0,024 Ом, rв=0,0072 Ом.
Решение этой задачи начнем с определения тока возбуждения, соответствующего величине Fкзi; из (3) при выбранном значении
соответствующего величине Fкзi; из (3) при выбранном значении . Для этого найдем вначале магнитный поток Фi:
. Для этого найдем вначале магнитный поток Фi:

где СF - электромеханическая постоянная ТЭД:

(Здесь μ - передаточное отношение редуктора; p и a - число пар полюсов и параллельных ветвей; N - число витков обмотки якоря; Dб - диметр бандажа колесной пары, м).
По величине Фi найдем по кривой намагничивания ТЭД ток  обеспечивающий совместно с
обеспечивающий совместно с  получение заданного значения силы тяги из (3) и определим величину суммарных потерь ΔP∑ Задаваясь новыми значениями
получение заданного значения силы тяги из (3) и определим величину суммарных потерь ΔP∑ Задаваясь новыми значениями и находя соответствующие им величины и ΔP∑, построим графики зависимости
и находя соответствующие им величины и ΔP∑, построим графики зависимости  для каждого ТЭД. В общем случае эта зависимость представляет собой трехмерную поверхность. При этом, задаваясь значениями силы тяги Fкзi будем выполнять сечение этой поверхности, в результате чего получим пространственную линию, определяющую зависимость ΔP∑i от величин токов
для каждого ТЭД. В общем случае эта зависимость представляет собой трехмерную поверхность. При этом, задаваясь значениями силы тяги Fкзi будем выполнять сечение этой поверхности, в результате чего получим пространственную линию, определяющую зависимость ΔP∑i от величин токов и
и соответствующую условию Fкзi=const.
соответствующую условию Fкзi=const.
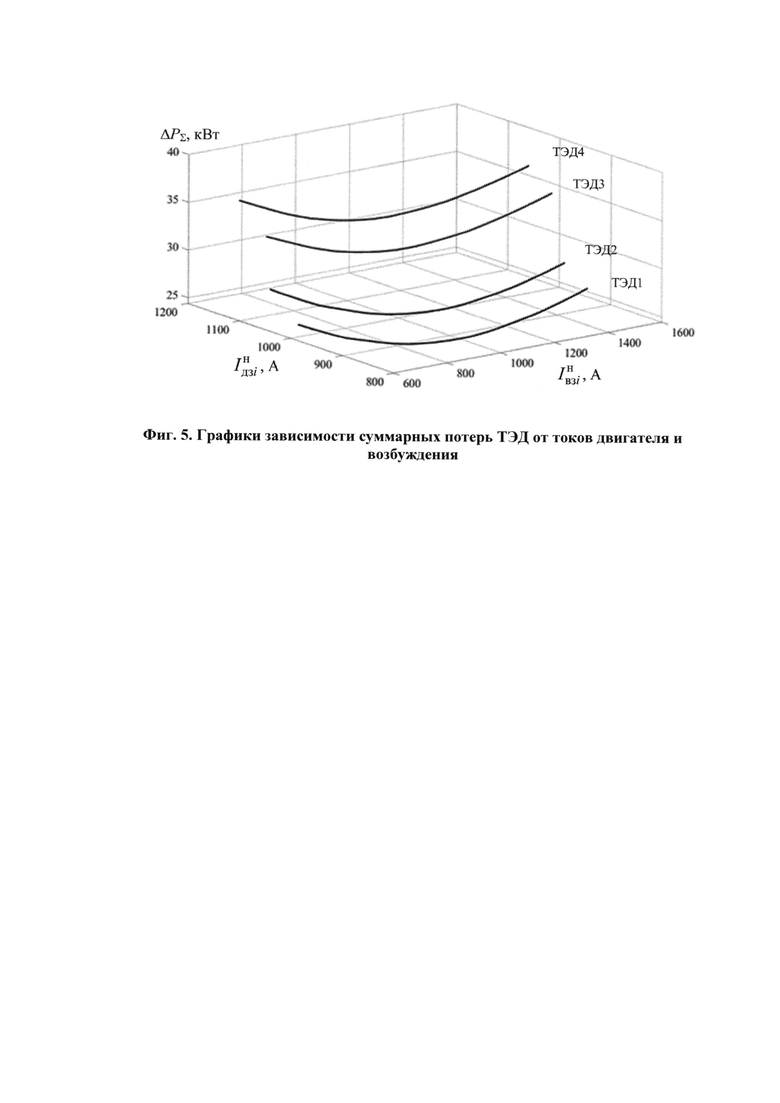
Построим графики зависимости суммарных потерь ΔP∑, определяемых выражением (4), от величин этих токов для ТЭД. Так, например для ТЭД №4, у которого Fкз4~74,4 кН, и ТЭД №3, у которого Fкз3 ~ 71,0 кН (фиг. 5), эти графики  представляют собой пространственные параболы с явно выраженным очень пологим минимумом суммарных потерь.
представляют собой пространственные параболы с явно выраженным очень пологим минимумом суммарных потерь.
Минимум суммарных потерь мощности для ТЭД №3 соответствует  и значениям токов
и значениям токов  Однако с точки зрения наименьшего приращения температуры нагрева ТЭД можно принять значения токов равными
Однако с точки зрения наименьшего приращения температуры нагрева ТЭД можно принять значения токов равными  при этом потери увеличатся до ΔP∑3=31,42 кВт, т.е. на ~0,5%, что не существенно. Для ТЭД №4 этот минимум (фиг. 4) составит
при этом потери увеличатся до ΔP∑3=31,42 кВт, т.е. на ~0,5%, что не существенно. Для ТЭД №4 этот минимум (фиг. 4) составит  и значениям токов
и значениям токов  и
и  При этом с точки зрения наименьшего приращения температуры нагрева ТЭД можно принять значения
При этом с точки зрения наименьшего приращения температуры нагрева ТЭД можно принять значения  что вызовет увеличение потерь до ΔP∑3=33,97 кBт, т.е. на ~0,8%, что также не существенно. Полученные заданные значения токов двигателя и возбуждения для тяговых характеристик Т30, Т1 и ТД приведены в таблице 2.
что вызовет увеличение потерь до ΔP∑3=33,97 кBт, т.е. на ~0,8%, что также не существенно. Полученные заданные значения токов двигателя и возбуждения для тяговых характеристик Т30, Т1 и ТД приведены в таблице 2.
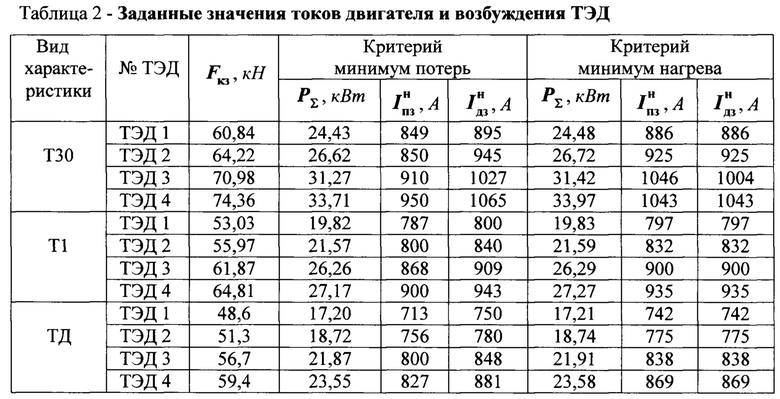
Поскольку наибольшее увеличение токов до 1046,4 превышает допустимое для тяговой характеристики значение 980А на 66А, то необходимо будет уменьшить длительность работы ТЭД №№3 и 4 на этой характеристике до 20 мин с последующей экспериментальной проверкой достаточности такого снижения.
Значения токов  и
и  приведенные в таблице 2, являются задающими сигналами для систем автоматического управления токами ТЭД (САУТ) и токами подпитки (САУЛ) или отпитки (САУО) каждой тележки [13].
приведенные в таблице 2, являются задающими сигналами для систем автоматического управления токами ТЭД (САУТ) и токами подпитки (САУЛ) или отпитки (САУО) каждой тележки [13].
При этом найденные токи  для режима независимого возбуждения могут быть получены на основе реализации режима подпитки обмоток возбуждения ТЭД, создаваемого системой автоматического управления подпиткой (САУЛ) путем открытия транзисторов VT1, VT4 каждого преобразователя УПВ1-4 (фиг. 2) в момент времени t=0 с. При этом появляются токи подпитки
для режима независимого возбуждения могут быть получены на основе реализации режима подпитки обмоток возбуждения ТЭД, создаваемого системой автоматического управления подпиткой (САУЛ) путем открытия транзисторов VT1, VT4 каждого преобразователя УПВ1-4 (фиг. 2) в момент времени t=0 с. При этом появляются токи подпитки  равные
равные  Эти токи создают магнитные потоки Фi, необходимые для обеспечения нормальной работы ТЭД при последующем включении ВИПов, создающих токи
Эти токи создают магнитные потоки Фi, необходимые для обеспечения нормальной работы ТЭД при последующем включении ВИПов, создающих токи 
Поскольку обмотки возбуждения зашунтированы сопротивлениями rш, то заданное значение тока подпитки  создаваемое вентилями УПВ, должно составить:
создаваемое вентилями УПВ, должно составить:

При появлении токов двигателей, которые включается позднее, токи возбуждения будут поддерживаться на заданном уровне путем уменьшения токов подпитки  так как их величины определяются соотношением:
так как их величины определяются соотношением:

Таким образом, токи будут уменьшаться по мере роста iдi и достигнут установившихся значений, приведенных в таблице 2. Это обеспечивается соответствующим управлением транзисторами VT1-VT4 в каждом преобразователе УПВ1-4(фиг. 2).
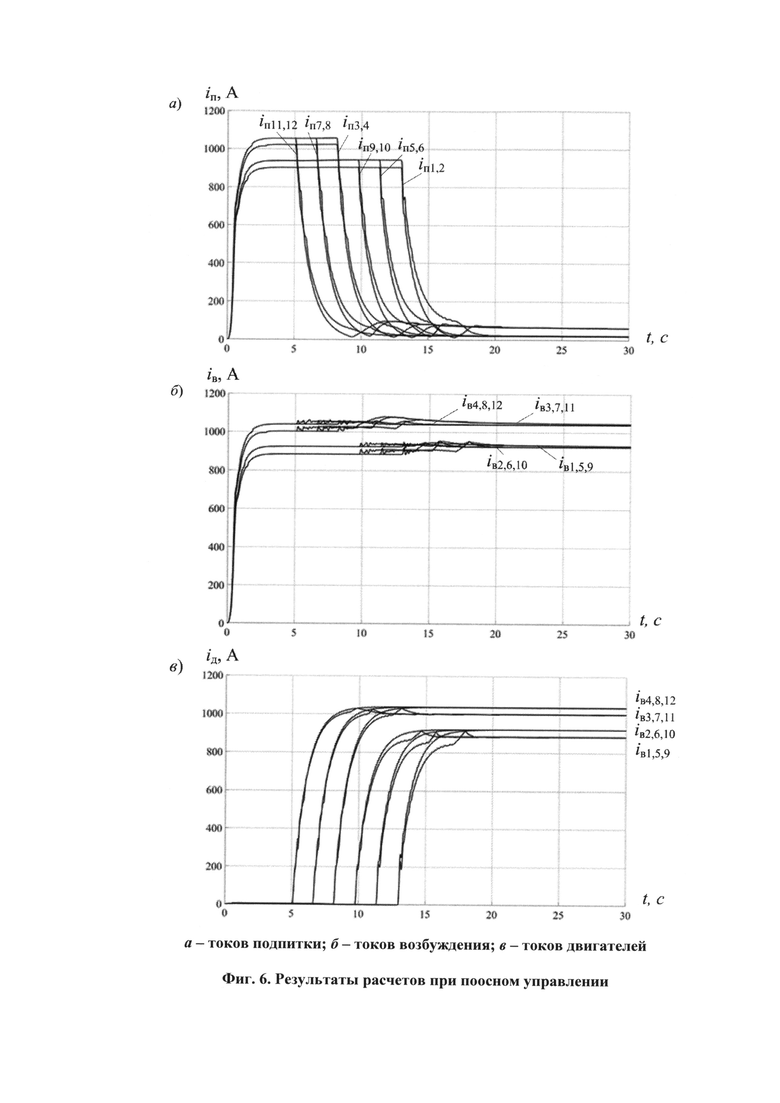
Для такого алгоритма были выполнены расчеты по имитации работы трех секционного электровоза переменного тока с ТЭД НБ514Е, как на электровозах 2ЭС5К. При этом была использована нелинейная модель силовой цепи электровоза с коллекторными ТЭД и раздельным учетом вихревых токов, приведенная в [12]. Результаты выполненных расчетов (фиг. 6) показывают следующее.
В момент времени t=0 с подаются управляющие сигналы на транзисторы VТ1 и VT4 каждого преобразователя УПB1-4 (фиг. 2). При этом токи подпитки iпi(t) (фиг. 6, a), а также токи возбуждения iвi(е) (фиг. 6, б), достигнут заданных значений  После этого в момент времени t=5 с происходит включение САУТ, а также ВИПов, создающих одинаковые величины напряжений на зажимах двух ТЭД, соответствующих шестой тележке третьей секции электровоза. Это вызывает появление токов iдi(t) (фиг. 6, в) для ТЭД №№11 и 12. Включение в работу ТЭД на других тележках происходит в соответствие с установленной очередностью через каждые 1,7 с, т.е. после того как токи двигателей достигают величин 700-800 А. В результате все ТЭД включаются в работу в течение 13,5 с (фиг. 6, в).
После этого в момент времени t=5 с происходит включение САУТ, а также ВИПов, создающих одинаковые величины напряжений на зажимах двух ТЭД, соответствующих шестой тележке третьей секции электровоза. Это вызывает появление токов iдi(t) (фиг. 6, в) для ТЭД №№11 и 12. Включение в работу ТЭД на других тележках происходит в соответствие с установленной очередностью через каждые 1,7 с, т.е. после того как токи двигателей достигают величин 700-800 А. В результате все ТЭД включаются в работу в течение 13,5 с (фиг. 6, в).
Изменение токов возбуждения происходит иначе (фиг. 6, б). Поскольку на электровозе используются ТЭД последовательного возбуждения, то после появления токов iдi токи  станут равны
станут равны  и с ростом они будут оставаться практически неизменными за счет уменьшения
и с ростом они будут оставаться практически неизменными за счет уменьшения 
После достижения токами шестой тележки iд12 (t) и iд11(t) заданных значений в работу включается второй ВИП четвертой тележки и т.д. (фиг. 6, б) в соответствие с очередностью, определяемой сигналами на выходе 1 пульта управления машиниста. Токи возбуждения ТЭД на шестой тележке (фиг. 6, б) после включения вентилей VT1, VT4 быстро достигают установившихся значений в соответствии с таблицей 3 и остаются неизменными до включения в работу ВИПов.
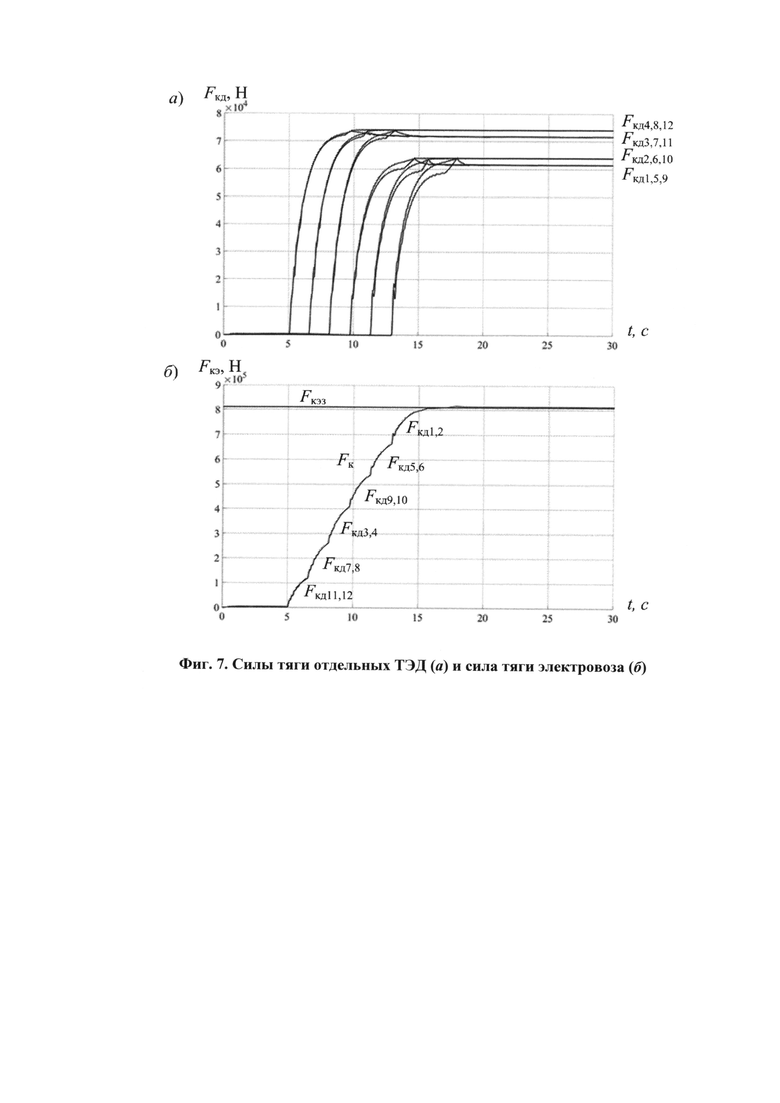
По графикам iдi(t) и iвi(t) были определены силы тяги Fкi(t) соответствующих ТЭД (фиг. 7, а) и всего трех секционного электровоза (фиг. 7, б):

где Фi(t) - магнитный поток i-го ТЭД, определяемый по кривой намагничивания в зависимости от величины тока возбуждения iвi(t).
Графики Fкi(t) (фиг. 7, a), построенные на основе (9) по графикам соответствующих токов (фиг. 6, б и в), показывают, что значения сил тяги отдельных ТЭД появляются практически в те же моменты времени 5,5-13,5 с, что и токи. Эти токи увеличиваются до установившегося значения, приведенного в таблице 2, аналогично токам iдi(t), так как реализуется режим независимого возбуждения  В результате того, что силы тяги отдельных ТЭД появляются со сдвигом во времени, суммарная сила тяги электровоза Fкэ(t) нарастает плавно (фиг. 7, б) и устанавливается на заданном значении в соответствие с выбранной характеристикой Т30, Т1 или ТД.
В результате того, что силы тяги отдельных ТЭД появляются со сдвигом во времени, суммарная сила тяги электровоза Fкэ(t) нарастает плавно (фиг. 7, б) и устанавливается на заданном значении в соответствие с выбранной характеристикой Т30, Т1 или ТД.
Таким образом, трогание и разгон поезда выполняются по характеристикам постоянства силы тяги ТЭД при их независимом возбуждении (фиг. 3). Если в процесс разгона поезда его фактическая скорость движения превысит величину νф, определяемую выражением (1), то система перейдет на характеристику постоянства мощности М при последовательном возбуждении ТЭД с полным током возбуждения iвi(t)=iдi(t) При этом машинист электровоза может с помощью рукоятки-манипулятора ПУМ установить позицию ЗРД в положение М1, соответствующее работе на характеристике постоянства мощности с ослабленным током возбуждения. В этом положении включается система автоматического управления отпиткой (САУО), изменяющая моменты открытия вентилей VT2, VT3 преобразователей УПВ1-4 (фиг. 2) и обеспечивающая выполнение условия:

где Ioз - заданное значение тока отпитки: 
Здесь [βmах] - максимальное значение коэффициента ослабления возбуждения, которое для ТЭД типа НБ514Е составляет [βmах]=0,45. Подставив это условие в (10), получим:

Таким образом, изменяя заданное значение тока отпитки в пределах от 0 до  можно обеспечить плавное управление работой ТЭД электровоза в режиме ослабления возбуждения.
можно обеспечить плавное управление работой ТЭД электровоза в режиме ослабления возбуждения.
Изобретение может быть реализовано на известных программных продуктах с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что выпрямительная установка возбуждения подключенная к средству шунтирования и средство шунтирования представленное мостовыми транзисторными управляемыми преобразователями, подключенными к обмоткам возбуждения ТЭД позволяет регулировать величину тока возбуждения индивидуально на каждом из ТЭД, по алгоритмам в соответствии заданными характеристиками режима ведения поезда без размыкания силовой цепи, изменяя лишь направление токов подпитки и отпитки, протекающих через шунтирующие мостовые транзисторные управляемые преобразователи в зависимости от режима ведения поезда.
Благодаря этому обеспечивается достижение технического результата, заключающегося в обеспечении возможности индивидуального, непрерывного и плавного управления токами возбуждения тяговых электродвигателей электровоза по заданным алгоритмам, тем самым обеспечивается повышение эффективности электрического привода электровоза и системы его управления.
Изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о его соответствии критерию патентоспособности «новизна».
Из уровня техники известен электрический привод электровоза, в котором система управления формировала алгоритм без учета тяговых характеристик постоянства силы тяги и мощности, а для переключения между режимами работы ТЭД применялись коммутационные аппараты, которые обеспечивали размыкание электрической цепи.
Однако из уровня техники не известен электрический привод электровоза, в котором управление токами возбуждения каждого ТЭД реализовывалось индивидуально в широком диапазоне и обеспечивалось в соответствии с заданными характеристиками по заданным и описанным алгоритмам. Ввиду этого изобретение соответствует критерию патентоспособности «изобретательский уровень».
Краткое описание чертежей
Изобретение поясняется следующими фигурами.
Фиг. 1 - Прототип пульта управления машиниста бесконтактный.
Фиг. 2 - Принципиальная схема электрического привода электровоза.
Фиг. 3. - Тяговые характеристики.
Фиг. 4 - Пульт управления машиниста.
Фиг. 5 - Графики зависимости суммарных потерь ТЭД от токов двигателя и возбуждения.
Фиг. 6 - Результаты расчетов при поосном управлении: а - токи подпитки; б - токи возбуждения; в - токи двигателей.
Фиг. 7 - Силы тяги отдельных ТЭД (а) и сила тяги электровоза (б).
Для иллюстрации возможности реализации и более полного понимания сути изобретения ниже представлен вариант его осуществления, который может быть любым образом изменен или дополнен, при этом настоящее изобретение ни в коем случае не ограничивается представленным вариантом.
Осуществление изобретения
Изобретение работает следующим образом.
На первичную обмотку тягового трансформатора 1 подается напряжение от источника 2 питания. С вторичной обмотки тягового трансформатора 1 питающее напряжение подается на выпрямительно-инверторные преобразователи 3, которые преобразуют переменный ток от источника питания в постоянный ток возбуждения.
Алгоритм работы электропривода электровоза в зависимости от массы поезда mп: выбираются характеристики Т30, Т1 и ТД, соответствующие 30 минутному, часовому или длительному режиму работы на характеристике постоянства силы тяги, либо сигналы М или Ml соответствующие работе на характеристиках постоянства мощности. Этим режимам соответствуют величины сил тяги Fкэ трех секционного электровоза, токов отдельных ТЭД Iд, токов подпитки Iп или отпитки Iо, а также зависимости Fк(ν) соответствующие работе на характеристиках постоянства силы тяги или постоянства мощности с полным или ослабленным возбуждением.
Таким образом, обеспечивается реализация режимов последовательного и независимого возбуждения, обеспечивается достижение технического результата, заключающегося в обеспечении индивидуального, непрерывного и плавного управления токами возбуждения тяговых электродвигателей электровоза, тем самым обеспечивается повышение эффективности электрического привода электровоза за счет применяемых алгоритмов его системы управления.
ЛИТЕРАТУРА:
1. Авт. свидетельство № 393138 SU, 07.07.1984. Электрический привод локомотива / А.Т. Головатый, Л.Я. Финкельштейн, Н.Л. Шамраев, В.С. Кашкарев. - Бюл. - 1984. - №25.
2. Головатый А.Т. Независимое возбуждение тяговых двигателей электровозов. / А.Т. Головатый, И.П. Исаев, Е.В. Горчаков. - М.: Транспорт, 1976. - 152 с.
3. Пат. на изобретение №2344949 С1 РФ, 27.01.2009. Способ управления электромагнитным моментом тяговых двигателей постоянного тока на электроподвижном составе / А.Г. Вольвич, Ю.А. Орлов, В.Г. Щербаков. - БИ. - 2009. - №3.
4. Задорожный В.Л. Особенности электровозов серии «Ермак» с поосным регулированием силы тяги / В.Л. Задорожный // Локомотив. - 2019. - №10. - С. 11-16.
5. Розенфельд В.Е. Теория электрической тяги: [Учеб. для вузов ж.-д. трансп.] / В.Е. Розенфельд, И.П. Исаев, Н.Н. Сидоров. - 2-е изд., перераб. и доп. - М.: Транспорт, 1983. - 328 с
6. Ротанов Н.А. Проектирование систем управления электроподвижным составом / Н.А. Ротанов, Д.Д. Захарченко, А.В. Плакс, В.И. Некрасов, Ю.М. Иньков; Под ред. Н.А. Ротанова. - М.: Транспорт, 1986. - 327 с.
7. Михальчук Н.Л. Электровоз с плавным управлением в режимах независимого и последовательного возбуждения тяговых электродвигателей / Н.Л. Михальчук, А.Н. Савоськин, О.Е. Пудовиков, А.А. Чучин // Железнодорожный транспорт. - 2022. - №9. - С. 35-39.
8. [https://pkpiris.ru/].
9. Контроллер машиниста электронный бесконтактный КМБ-2. Руководство по эксплуатации ТЯБК. 421243.003.
10. Пат. на изобретение RU №2788223, 17.01.2023. Заявка №2022124940 от 22.09.2022 Электрический привод электровоза / Ю.И. Попов, Н.Л. Михальчук, А.Н. Савоськин, О.Н. Пудовиков, А.А. Чучин - Б.И. - 2023. - №2.
11. Михальчук Н.Л. Силовая схема электровоза переменного тока с применением управляемого транзисторного преобразователя возбуждения / Н.Л. Михальчук, А.Н. Савоськин, А.А. Чучин // Электроника и электрооборудование транспорта. - 2022. - №3. - С. 18-23.
12. Михальчук Н.Л Электромагнитные процессы в силовой схеме электровоза с управляемым преобразователем возбуждения / Н.Л. Михальчук, А.Н. Савоськин, А.А. Чучин // Электротехника. - 2022. - №9. - С. 34-42. - DOI: 10.53891/00135860.2022.9.34-42.
13. Пат. на изобретение RU №2787135, 29.12.2022. Заявка №2022108279 от 29.03.2022 Способ автоматического управления током тяговых электродвигателей подвижного состава / Ю.И. Попов, Н.Л. Михальчук, А.Н. Савоськин, О.Н. Пудовиков. -БИ. - 2022. - №1.
14. Михальчук Н.Л. О направлениях цифровой трансформации в локомотивном комплексе / Н.Л. Михальчук // Железнодорожный транспорт. - 2019. - №5. - С. 35-38.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ МОМЕНТОМ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПОСТОЯННОГО ТОКА НА ЭЛЕКТРОПОДВИЖНОМ СОСТАВЕ | 2007 |
|
RU2344949C1 |
| ПРЕОБРАЗОВАТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2385237C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ РЕЖИМА РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ ЭЛЕКТРОВОЗОВ ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2370381C1 |
| Электрический привод электровоза | 2022 |
|
RU2788223C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ТОКОВОЙ ЗАЩИТЫ ББР ЭЛЕКТРОВОЗОВ СЕРИИ ВЛ80Р | 2011 |
|
RU2459717C1 |
| Система управления тяговыми электродвигателями тепловоза с поосным регулированием силы тяги и учетом эффективности охлаждения электродвигателей | 2022 |
|
RU2789235C1 |
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| СПОСОБ ДИАГНОСТИКИ ПЛЕЧ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА ПОД НАГРУЗКОЙ | 2007 |
|
RU2346829C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |

Группа изобретений относится к электрическим тяговым системам транспортных средств. Способ управления электрическим приводом электровоза однофазно-постоянного тока с управляемыми преобразователями возбуждения заключается в том, что при трогании и разгоне подают управляющие сигналы на транзисторы каждого индивидуального транзисторного управляемого преобразователя возбуждения (УПВ), при этом появляются токи подпитки, равные значению тока независимого возбуждения, затем последовательно включают выпрямительно-инверторные преобразователи (ВИП), появляются токи двигателей, и при плавном увеличении токов двигателей токи возбуждения будут поддерживаться на заданном уровне путем уменьшения токов подпитки. После разгона переходят на характеристику постоянства мощности при последовательном возбуждении тяговых электродвигателей с полным током возбуждения или на характеристику постоянства мощности с ослабленным током возбуждения. Также заявлено устройство управления электрическим приводом электровоза, содержащее пульт управления машиниста и микропроцессорную систему. Технический результат заключается в повышении эффективности электрического привода электровоза. 2 н. и 3 з.п. ф-лы, 7 ил., 2 табл.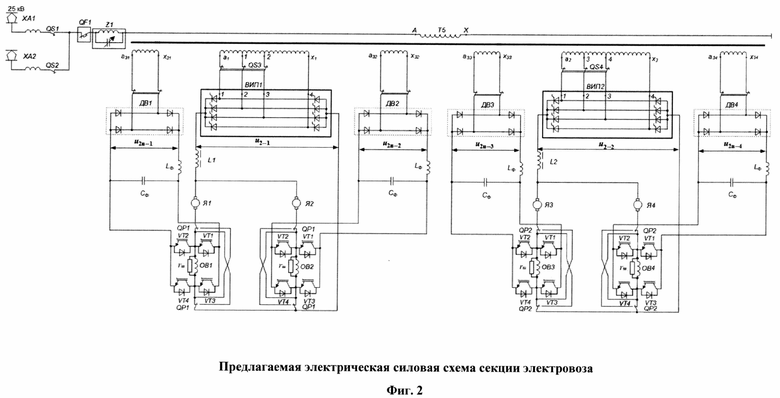
1. Способ управления электрическим приводом электровоза однофазно-постоянного тока с управляемыми преобразователями возбуждения, содержащим тяговый трансформатор, к вторичным обмоткам которого подключены параллельно два выпрямительно-инверторных преобразователя (ВИП), к каждому из которых через сглаживающий реактор подключены параллельно якоря двух тяговых электродвигателей и обмотки возбуждения, четыре индивидуальных вторичных обмотки тягового трансформатора, к которым подключены четыре индивидуальных диодных выпрямительных установки возбуждения, к выходам которых через LС-фильтры подключены индивидуальные транзисторные управляемые преобразователи возбуждения (УПВ), содержащие вентили VT1-VT4, которые шунтируют индивидуально каждую обмотку возбуждения ТЭД, заключающийся в том, что с помощью карточки-ключа и рукоятки-манипулятора пульта машиниста задают режим работы электровоза, который выполняется микропроцессорной системой, в котором при трогании и разгоне подают управляющие сигналы на транзисторы VТ1 и VT4 каждого УПB, при этом появляются токи подпитки  , равные значению тока независимого возбуждения
, равные значению тока независимого возбуждения  , соответствующему выбранной характеристике тридцатиминутного (Т30), часового (Т1) или длительного (ТД) режимов работы, затем последовательно включают ВИП, появляются токи двигателей
, соответствующему выбранной характеристике тридцатиминутного (Т30), часового (Т1) или длительного (ТД) режимов работы, затем последовательно включают ВИП, появляются токи двигателей  , токи независимого возбуждения
, токи независимого возбуждения  станут равны:
станут равны:  , и при плавном увеличении токов двигателей , токи возбуждения будут поддерживаться на заданном уровне путем уменьшения токов подпитки за счет соответствующего управлением транзисторами VT1 и VT4 в каждом преобразователе УПВ, после разгона переходят на характеристику постоянства мощности (М) при последовательном возбуждении тяговых электродвигателей с полным током возбуждения или на характеристику постоянства мощности с ослабленным током возбуждения (М1), при которой изменяя моменты открытия вентилей VT2, VT3 преобразователей УПВ, изменяют заданное значение тока отпитки
, и при плавном увеличении токов двигателей , токи возбуждения будут поддерживаться на заданном уровне путем уменьшения токов подпитки за счет соответствующего управлением транзисторами VT1 и VT4 в каждом преобразователе УПВ, после разгона переходят на характеристику постоянства мощности (М) при последовательном возбуждении тяговых электродвигателей с полным током возбуждения или на характеристику постоянства мощности с ослабленным током возбуждения (М1), при которой изменяя моменты открытия вентилей VT2, VT3 преобразователей УПВ, изменяют заданное значение тока отпитки  и обеспечивают выполнение условия:
и обеспечивают выполнение условия:  , где
, где  - ток возбуждения тяговых электродвигателей,
- ток возбуждения тяговых электродвигателей,  - ток тяговых электродвигателей.
- ток тяговых электродвигателей.
2. Способ управления электрическим приводом электровоза по п. 1, реализующий поосное управление токами и силой тяги электровоза, без разрыва силовой цепи тяговых электродвигателей, обеспечивающий плавность и непрерывность реализуемой силы тяги.
3. Способ управления электрическим приводом электровоза по п. 1, отличающийся тем, что выбор заданных значений токов двигателей и независимого возбуждения выполнен на основе минимизации суммарных потерь электрической энергии на сопротивлениях обмоток якоря и возбуждения тяговых двигателей.
4. Способ управления электрическим приводом электровоза по п. 1, обеспечивающий автоматическое последовательное включение в работу тяговых двигателей отдельных тележек, для плавного увеличения силы тяги электровоза до значений, заданных соответствующей тяговой характеристикой.
5. Устройство управления электрическим приводом электровоза однофазно-постоянного тока с управляемыми преобразователями возбуждения, содержащее пульт управления машиниста, содержащий замок для карточки-ключа управления, рукоятку-манипулятор, кнопки автоматического управления и сброса, индикаторы, указывающие выбранные режимы работы, а также микропроцессорную систему, выполняющую алгоритм, заданный карточкой-ключом и рукояткой-манипулятором, реализующий способ управления по любому из пп. 1-4, причем для фиксации рукоятки-манипулятора в нулевом положении она оборудована механической кнопкой, выполняющей такую фиксацию.
| Электрический привод электровоза | 2022 |
|
RU2788223C1 |
| СПОСОБ ВЫРАВНИВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2018 |
|
RU2724981C2 |
| ТЯГОВЫЙ ПРИВОД | 2007 |
|
RU2384424C2 |
| Сепаратор для разделения минерального сырья | 1958 |
|
SU121723A1 |
| Световой кадроотметчик для звукозаписывающего аппарата | 1950 |
|
SU93760A1 |

