Изобретение относится к электрооборудованию электроподвижного состава (ЭПС) железных дорог и предназначено для автоматизации управления электроприводом локомотивов.
Известно устройство для обнаружения боксования и юза колесной пары (КП) транспортного средства, содержащее блок выделения минимального сигнала, входы которого соединены с выходами датчиков частоты вращения КП, а выход - с дифференцирующим блоком, выход которого соединен с входом интегратора, блок задержки, подключенный выходом к одному из входов ключевого элемента, блок сравнения с элементом памяти на выходе, один вход которого подключен к выходу ключевого элемента, другой - к выходу интегратора, а выход - к одному из входов второго блока сравнения, другой вход которого соединен с выходом датчика частоты вращения соответствующей КП, а выход - с управляющим входом ключевого элемента и системой управления тяговым электродвигателем (ТЭД), при этом вход блока задержки соединен с выходом датчика частоты вращения соответствующей КП (SU, №1468789, B60L 3/10, опубл. 30.03.1989).
В этом устройстве цепь из блока выделения минимального сигнала от датчиков частоты вращения КП, блока дифференцирования и интегратора служит для коррекции скорости локомотива в блоке сравнения с элементом памяти на выходе при боксовании КП.
Наибольшая потеря скорости локомотива наиболее вероятна при синхронном боксовании КП. В этом случае требуется и больший корректирующий сигнал. Этого устройство не выявляет, поскольку при синхронном боксовании КП сигнал на выходе устройства выделения минимального сигнала возрастает. Следовательно, при контроле знака производной сигнал на выходе интегратора (приращение скорости) будет равен нулю. В результате этого сигнал на выходе блока сравнения скорости локомотива и частоты вращения КП может оказаться недостаточным для корректировки тягового усилия и устранения боксования, поэтому данное устройство при синхронном боксовании КП не может быть признано эффективным.
Наиболее близким является устройство для защиты от боксования колесных пар электроподвижного состава, содержащее систему управления электроподвижным составом, датчики частоты колесной пары, установленные на каждой колесной паре, подсоединенные к блоку частоты вращения колесной пары, тяговые электродвигатели, по два на каждую из двух тележек, блок управления устройством подачи песка, первый выход которого подсоединен к первому устройству подачи песка на тележку, а второй выход - ко второму устройству подачи песка на тележку (RU, №2025310, B60L 3/10, опубл. 30.12.1994).
В этом устройстве выходы датчиков частоты вращения колесных пар через блок частоты вращения колесной пары (первые электрические преобразователи) соединены с входами первых блоков выделения максимального и минимального сигналов. Входы первого элемента сравнения подключены к выходам первого блока выделения максимального сигнала и датчика скорости электроподвижного состава, а выход через первый пороговый элемент - к управляющему входу первого ключевого элемента. Устройство имеет первый блок дифференцирования, второй, третий и четвертый пороговые элементы, задатчик тока тяговых двигателей, систему автоматического управления электроподвижным составом и блок управления устройством подачи песка (блок управления работой песочниц). В устройство введены режимный переключатель, первый фильтр нижних частот, последовательно включенные второй блок выделения максимального сигнала, блок выделения амплитудного значения сигнала, апериодическое звено и третий блок выделения максимального сигнала. Вход первого фильтра нижних частот через соответствующие контакты режимного переключателя подключен к выходам первых блоков выделения максимального и минимального сигналов, а выход через первый блок дифференцирования - к одному из входов второго блока выделения максимального сигнала. Сигнальный вход первого ключевого элемента соединен с выходом задатчика тока тяговых двигателей, а выход - с другим входом второго блока выделения максимального сигнала. Второй вход третьего блока выделения максимального сигнала подключен к выходу блока выделения амплитудного значения сигнала, а выход - ко входу системы автоматического управления электроподвижным составом.
В известном устройстве при возникновении боксования (юза) одной или нескольких колесных пар (КП) и изменении напряжения на выходе блока выделения максимального сигнала токи тяговых двигателей снижаются за счет автоматической коррекции заданного значения тока на входе регулятора системы автоматического управления ЭПС. Срыв в избыточное скольжение всех КП ЭПС вызывает изменение сигнала на выходе блока выделения минимального сигнала (блока выделения максимального сигнала), пропорционального ускорению (замедлению) КП с минимальной (максимальной) частотой вращения, происходят снижение заданного значения тока и синхронное боксование КП ликвидируется. Боксование КП в тележке (секции) вызывает изменение сигнала на выходе блока выделения максимального сигнала (блока выделения минимального сигнала), в результате осуществляется импульсная подсыпка песка под боксующие (юзующие) КП. Увеличение (уменьшение) частоты вращения КП обусловливает снижение по естественным характеристикам токов тягового двигателя, связанных с боксующими КП. Сигналом с выхода элемента сравнения вызывается работа песочниц. Два канала обеспечения подсыпки песка под КП вводятся, исходя из повышения чувствительности и быстродействия защиты при работе тягового электродвигателя.
Ограничением этого технического решения по существу является использование двухуровневой противобоксовочной системы (только по выделению максимального и минимального сигналов), что приводит к повышенному расходу песка и электрической энергии питающей тяговые электродвигатели ЭПС особенно для электровозов при вождении поездов повышенного веса и длины (например, для поездов весом 6000 тонн и более).
Например, использующиеся системы противобоксования не дают достаточной эффективности на участках, имеющих перепад высот до 1000 метров и особенности окружающей среды (наличие незамерзающих водных источников, структуры выпадающих осадков, перепады атмосферного давления, разброс значений относительной влажности воздушной среды, множество точек (мест) выпадения росы круглый год, что отрицательно влияет на фактический коэффициент сцепления в зависимости от места на участке, который постоянно меняется от 0,12 до 0,28.
Проводимый постоянно мониторинг загруженности электровозов по сцеплению на участке Тайшет - Северобайкальск - Таксимо Восточно-Сибирской ж.д. в осенне-зимний период с температурой до -50°C установил, что после прохождения ТО-2 на ст. Тайшет с полной экипировкой песком поездов с четными номерами: до ст. Коршуниха (555 км) доходит 1/3 электровозов, которым необходимо пополнение песком; до ст. Лена (723 км) доходят оставшиеся 2/3 части электровозов. Затем электровозы отцепляются от поездов для полной экипировки песком, которого хватает только до ст. Северобайкальск (352 км), где все 100% электровозов отцепляются от четных поездов и следуют на ТО-2 только для полной экипировки песком и далее следуют до ст. Таксимо (412 км). Сход 1/3 электровозов с кольца (отцепка от поезда) приводит к полному нарушению графика поездов, просрочки сроков доставки грузов грузополучателям.
Решаемая изобретением задача - улучшение технико-эксплуатационных характеристик и минимизация необходимости резкого изменения (минимальная регулировка) скорости ЭПС за счет индивидуального регулирования потока намагничивания тяговых электродвигателей (ТЭД).
Технический результат заключается в снижении расхода песка и экономии электрической энергии, питающей тяговые электродвигатели ЭПС.
Для решения поставленной задачи с достижением указанного технического результата в известном устройстве для защиты от боксования колесных пар электроподвижного состава, содержащем систему управления электроподвижным составом, датчики частоты колесной пары, установленные на каждой колесной паре, подсоединенные к блоку частоты вращения колесной пары, тяговые электродвигатели, по два на каждую из двух тележек, блок управления устройством подачи песка, первый выход которого подсоединен к первому устройству подачи песка на тележку, а второй выход - ко второму устройству подачи песка на тележку, согласно заявленному техническому решению введены регулятор напряжения обмоток тягового электродвигателя, выполненный с четырьмя уровнями регулирования напряжения, выпрямительно-инверторный преобразователь, установленный на каждой тележке для двух ее тяговых электродвигателей, каждый из которых снабжен двумя контакторами, система управления электроподвижным составом выполнена из микропроцессорного блока, блока управления контакторами, выход блока частоты вращения колесной пары соединен с первым входом микропроцессорного блока, вход-выход которого соединен с входом-выходом блока управления контакторами, первый выход микропроцессорного блока соединен с входами выпрямительно-инверторных преобразователей каждой из тележек, а второй выход микропроцессорного блока - с входом блока управления устройством подачи песка, первый контактор установлен на первой обмотке тягового электродвигателя, а второй контактор - на второй его обмотке, выпрямительно-инверторный преобразователь подсоединен двумя цепями, соответственно, к обмоткам первого и второго тягового электродвигателя тележки, первой цепью - к первой обмотке первого тягового электродвигателя при замыкании его первого контактора, первой цепью - ко второй обмотке первого тягового электродвигателя при замыкании его второго контактора, второй цепью - к первой обмотке второго тягового электродвигателя при замыкании его первого контактора, второй цепью - ко второй обмотке второго тягового электродвигателя при замыкании его второго контактора, выходы выпрямительно-инверторных преобразователей двух тележек соединены со вторым входом микропроцессорного блока, третий выход которого соединен со входом регулятора напряжения обмоток тягового электродвигателя, блок управления контакторами имеет четыре пары выходов, каждая из которых предназначена для замыкания или размыкания первого и второго контакторов тягового электродвигателя, первый выход первой пары подсоединен ко входу первого контактора первого тягового электродвигателя первой тележки, а второй выход первой пары - ко входу второго контактора первого тягового электродвигателя первой тележки, первый выход второй пары подсоединен ко входу первого контактора второго тягового электродвигателя первой тележки, а второй выход второй пары - ко входу второго контактора второго тягового электродвигателя первой тележки, первый выход третьей пары подсоединен ко входу первого контактора первого тягового электродвигателя второй тележки, а второй выход третьей пары - ко входу второго контактора первого тягового электродвигателя второй тележки, первый выход четвертой пары подсоединен ко входу первого контактора второго тягового электродвигателя второй тележки, а второй выход четвертой пары - ко входу второго контактора второго тягового электродвигателя второй тележки.
Указанные преимущества изобретения, а также его особенности поясняются с помощью прилагаемого чертежа.
Фиг.1 изображает функциональную схему заявленного устройства.
На фиг.1 показаны:
1 - микропроцессорный блок;
21 22 23 24 - датчики частоты вращения, установленные на каждой КП;
2 - блок частоты вращения КП;
3 - регулятор напряжения обмоток ТЭД;
4 - система управления электроподвижным составом;
51 52 - схематично обозначенная тележка локомотива;
61 62 - выпрямительно-инверторный преобразователь (установлен по одному в тележке, контактирует и взаимодействует с двумя тяговыми электродвигателями);
7 - блок управления контакторами;
71 72 - выходы блока 7 на контакторы, установленные по 2 шт. на каждом ТЭД;
8 - блок управления устройствами подачи песка потележечно;
81 82 - выходы блока 8 на блоки устройства подачи песка;
91 92 - блок устройства подачи песка на тележку;
101 102 - контакторы, установленные соответственно на первой и второй обмотках ТЭД;
11, 12, 13 - в целях упрощения схематично обозначены оси колесных пар с установленными на них ТЭД, шунтами с сопротивлениями и контакторами, аналогично тому, как описана первая ось КП;
14 - тяговый электродвигатель (ТЭД).
Устройство для защиты от боксования колесных пар электроподвижного состава (фиг.1) содержит систему 4 управления электроподвижным составом, датчики 21 22 23 24 частоты колесной пары (КП), установленные на каждой КП и подсоединенные к блоку 2 частоты вращения КП, тяговые электродвигатели 14 (ТЭД), по два на каждую из двух тележек 51 52, блок 8 управления устройством подачи песка, первый выход 81 которого подсоединен к первому устройству 91 подачи песка на тележку 51, а второй выход 82 - ко второму устройству 92 подачи песка на тележку 52.
Введены регулятор 3 напряжения обмоток ТЭД, выполненный с четырьмя уровнями регулирования напряжения, выпрямительно-инверторный преобразователь (ВИП) 61 62, установленный на каждой тележке 51 52 для двух ее ТЭД, каждый из которых снабжен двумя контакторами 101 102, система 4 управления электроподвижным составом выполнена из микропроцессорного блока 1, блока 7 управления контакторами, блока 8 управления устройством подачи песка. Выход блока 2 частоты вращения КП соединен с первым входом микропроцессорного блока 1. Вход-выход микропроцессорного блока 1 соединен с входом-выходом блока 7 управления контакторами. Первый выход микропроцессорного блока 1 соединен с входами (ВИП) 61 62 каждой из тележек 51 52, а второй выход микропроцессорного блока 1 - со входом блока 8 управления устройством подачи песка. Первый контактор 101 установлен на первой обмотке ТЭД 14, а второй контактор 102 - на второй его обмотке. ВИП 61 62 подсоединен двумя цепями, соответственно, к обмоткам первого и второго ТЭД 14 тележки 51 52. Первой цепью - к первой обмотке первого ТЭД 14 при замыкании его первого контактора 101, первой цепью - ко второй обмотке первого ТЭД 14 при замыкании его второго контактора 102. Второй цепью - к первой обмотке второго тягового электродвигателя при замыкании его первого контактора, второй цепью - ко второй обмотке второго тягового электродвигателя при замыкании его второго контактора (на фиг.1 второй ТЭД для простоты не показан). Выходы ВИП 61 62 двух тележек 51 52 соединены со вторым входом микропроцессорного блока 1. Третий выход микропроцессорного блока 1 соединен с входом регулятора 3 напряжения обмоток тягового электродвигателя.
Блок 7 управления контакторами имеет четыре пары выходов 71 72, каждая из которых предназначена для замыкания или размыкания первого 101 и второго контакторов 102 тягового электродвигателя. Первый выход 71 первой пары подсоединен ко входу первого контактора 101 первого ТЭД 14 первой тележки 51, а второй выход 72 первой пары - ко входу второго контактора 102 первого ТЭД 14 первой тележки 51. Первый выход второй пары 71 подсоединен ко входу первого контактора второго тягового электродвигателя первой тележки 51, а второй выход 72 второй пары - ко входу второго контактора второго тягового электродвигателя первой тележки 51. (На фиг.1 второй тяговый электродвигатель первой тележки 51 и ТЭДы второй тележки 52 для простоты не показаны, обозначены оси колесных пар 11, 12, 13 с установленными на них ТЭД, шунтами с сопротивлениями и контакторами, аналогично тому, как описана первая ось КП с ТЭД 14 и с первым и вторым контакторами 101 102). Первый выход 71 третьей пары подсоединен к входу первого контактора первого тягового электродвигателя второй тележки 52, а второй выход третьей пары - ко входу второго контактора первого тягового электродвигателя второй тележки 52. Первый выход 71 четвертой пары подсоединен ко входу первого контактора второго тягового электродвигателя второй тележки 52, а второй выход четвертой пары - ко входу второго контактора второго тягового электродвигателя второй тележки 52.
Работает устройство для защиты от боксования колесных пар электроподвижного состава (фиг.1) следующим образом.
Скорость V движения определяется исходя из уравнения равновесия электродвижущих сил тягового электродвигателя (при установившемся электрическом режиме).
U - приложенное к двигателю напряжение, B;
I - ток тягового двигателя, A;
R - сопротивление обмоток двигателя, Ом;
c - коэффициент двигателя, зависящий от конструкции (числа полюсов, пазов и т.д.);
Ф - магнитный поток главных полюсов, Вб.
В соответствии с формулой можно варьировать скорость V изменениями магнитного потока Ф без прямых трансформаций других составляющих.
Для диагностирования скольжения (боксования) КП используются три признака - приращение скорости скольжения, тока и ускорения (ΔVск, км/ч; ΔI, A; Δa, м/с2).
Регулятор 3 напряжения обмоток ТЭД выполнен с четырьмя уровнями регулирования напряжения для регулирования пороговых значений начавшегося боксования КП. Для первого порогового значения осуществляется импульсная подача песка под тележку 51 или 52 с боксующей КП. Если боксование продолжается с увеличением трех признаков (ΔVск; ΔI; Δа), то достигается второй порог. Осуществляется увеличение магнитного потока головных полюсов за счет отключения второй ступени ослабления поля (ОП2) тягового электродвигателя только боксующей КП. При ликвидации боксования по трем признакам ОП2 через 10 секунд система восстанавливается в нормальное состояние. Если после отключения ОП2 продолжается увеличение трех признаков (ΔVск; ΔI; Δa), то и скольжение увеличивается и достигается третий порог. Снова осуществляется увеличение магнитного потока головных полюсов за счет отключения первой ступени ослабления поля ОП1 только боксующей колесной пары - переход работы тягового электродвигателя на полном поле. При ликвидации боксования по трем признакам третьего порога автоматически восстанавливаются эксплуатационные нормальные режимы ТЭД с выдержкой 10 секунд ОП1 и ОП2.
Если после отключения ОП1 по трем признакам продолжается увеличение значений, достигая четвертого порога, то срабатывает штатная автоматическая противобоксовочная система со снижением тока якорей ТЭДов в секции за счет регулирования ВИП 61 и/или ВИП 62 (снижение напряжения) по алгоритму, обеспечивающему плавное снижение напряжения.
Таким образом, регулятор 3 напряжения обмоток тягового электродвигателя, разделяющий интервал рабочего напряжения на четыре зоны, с помощью системы 4 управления электроподвижным составом автоматически последовательно переключается для обеспечения плавного движения ЭПС.
Алгоритм работы микропроцессорного блока 1 понятен из дальнейшего описания работы заявленного устройства для защиты от боксования колесных пар электроподвижного состава (фиг.1).
Сигналы об изменении скорости вращения каждой КП в реальном режиме времени через установленный интервал времени t системой 4 управления электроподвижным составом посредством датчиков 21, 22, 23, 24 частоты вращения колесной пары передают сигнал на вход блока 2 частоты вращения КП, который преобразовывает аналоговые сигналы в цифровые. Преобразованные цифровые сигналы о частоте вращения каждой колесной пары 21, 22, 23, 24, поступившие в микропроцессорный блок 1 сравниваются с установленными минимальным и максимальным сигналом скорости каждой колесной пары, изменение которого прямо зависит от изменения поступившего сигнала ТЭД 14 посредством ВИП 61 и 62 и блока 7 управления контакторами.
При достижении максимального значения напряжения на обмотках ТЭД 14 сигнал передается посредством выпрямительно-инверторного преобразователя 61, 62 в микропроцессорный блок 1, который в свою очередь: а) передает сигнал на вход регулятора 3 напряжения обмоток ТЭД, изменяя его положение; и б) сравнивает поступивший сигнал с установленными минимальным и максимальным сигналами напряжения обмоток ТЭД. При подтверждении достижения максимального значения микропроцессорный блок 1 вырабатывает и передает сигнал на вход блока управления контакторами 7, который передает сигнал на выходы типа 71 блока 7 и замыкает контакторы 101 на всех КП за исключением контактора 101 первой КП, а через время t при поддержании максимального значения напряжения обмоток ТЭД 14 микропроцессорный блок 1 вырабатывает и передает сигнал на вход блока управления контакторами 7, который передает замыкающий сигнал через выход 71 на контактор 101 на первой КП и через выходы 72 на контакторы 102 на всех остальных КП.
Итак, датчики частоты вращения КП 21 22 23 24 передают сигналы в микропроцессорный блок 1 посредством аналогово-цифрового преобразования их в блоке 2 частоты вращения КП. В микропроцессорном блоке 1 сигнал с каждой КП сравнивается с минимальным и максимальным установленным сигналом, а также сигналы сравниваются между собой.
1. При возникновении боксования одной КП в тележке (секции), например третьей КП 12 в тележке 52, сигнал с датчика 23 будет меньше установленного максимального сигнала, но больше, чем величина сигнала с датчиков частоты вращения КП 21 22 и 24. В этом случае, микропроцессорный блок 1 не передает сигнал на устройство 92 подачи песка под тележку 52, в которой находится боксующая КП, посредством блока 8 управления устройствами подачи песка.
2. При продолжении боксования третьей КП в секции сигнал с датчика 23 поступает посредством блока 2 частоты вращения КП в микропроцессорный блок 1, где повторно производится сравнение с минимальным и максимальным установленными значениями сигнала, и в случае подтверждения достижения максимального сигнала микропроцессорный блок 1 передает сигнал на устройство 92 подачи песка под тележку 52, в которой находится боксующая КП 12, через выход 82 блока 8 управления устройствами подачи песка, а также снижает скорость вращения боксующей КП посредством передачи сигнала на выход 72 блока 7 управления контакторами, соединенного с размыкающим контактором третьей КП, обозначенной на схеме позицией 12.
3. Если боксование продолжается после снижения скорости путем размыкания контактора 102 третьей КП, обозначенной на схеме блоком 12, то микропроцессорный блок 1 продолжает передавать сигнал на устройство 92 подачи песка под тележку 52, в которой находится боксующая КП, через выход 82 блока 8 управления устройствами подачи песка, а также снижает скорость вращения боксующей КП посредством передачи сигнала на выход 71 блока 7 управления контакторами, соединенного с размыкающим контактором 101 третьей КП, обозначенной на схеме блоком 12.
4. Если боксование продолжается после снижения скорости путем размыкания контактора 101 третьей КП, обозначенной на схеме блоком 11, то микропроцессорный блок 1 продолжает передавать сигнал на устройство 92 подачи песка под тележку 52, в которой находится боксующая КП, через выход 82 блока 8 управления устройствами подачи песка. В микропроцессорном блоке 1 постоянно сравниваются поступающие сигналы об увеличении частоты вращения с датчика 23 с сигналами с датчиков частоты вращения КП 21 22 и 24 и при достижении установленной максимальной разницы между сигналами, поступающими с датчика 23 боксующей КП и датчиков частоты вращения КП 21 22 и 24, в микропроцессорном блоке 1 рассчитывается первая производная скорости боксующей КП по времени ее боксования, получая значение ускорения. Полученное значение ускорения боксующей КП сравнивается с максимальным и минимальным установленными значениями и при достижении максимального значения ускорения микропроцессорный блок 1 снижает скорость вращения всех КП в секции путем передачи сигнала о снижении напряжения на обмотках ТЭД, обозначенного на схеме 14, через подачу сигнала на вход ВИП 61 и 62 об изменении пропускной способности напряжения через ВИП.
5. В случае, если боксование, например, третьей КП начинается ранее достижения максимального значения напряжения на обмотках ТЭД 14, тогда сигнал с датчика 23 поступает посредством блока 2 частоты вращения КП в микропроцессорный блок 1, где повторно производится сравнение с минимальным и максимальным установленными значениями сигнала, и в случае подтверждения достижения максимального сигнала микропроцессорный блок 1 снижает скорость вращения боксующей КП путем передачи сигнала о снижении напряжения на обмотках ТЭД, обозначенного на схеме 14, через подачу сигнала на вход ВИП 62 об изменении пропускной способности напряжения через ВИП. После прекращения боксования скорость вращения ранее боксующей КП восстанавливается до прежнего значения.
Действия при возникновении синхронного боксования производятся аналогичные для каждой боксующей КП.
Работа и строение блоков 11 12 13 КП с ТЭД и контакторами, разделенными на две тележки, обозначенные схематично 51 и 52, идентичны расписанной выше схеме.
При наличии более двух тележек 51 и 52 (секций) в ЭПС работа в них производится идентично описанной выше.
Наиболее успешно заявленное устройство для защиты от боксования колесных пар электроподвижного состава промышленно применимо для автоматизации управления электроприводом локомотивов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| МИКРОПРОЦЕССОРНАЯ СИСТЕМА ЗАЩИТЫ ОТ БОКСОВАНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2440898C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОВЫШЕНИЯ СЦЕПЛЕНИЯ | 2008 |
|
RU2398685C2 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2018 |
|
RU2702549C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| Способ обнаружения боксования и юза колес транспортного средства с электрической передачей | 2016 |
|
RU2657157C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство для управления многодвигательным приводом | 1978 |
|
SU1310992A1 |
Изобретение относится к электрооборудованию электроподвижного состава. Устройство содержит систему управления электроподвижным составом (ЭПС), датчики частоты колесной пары (КП), подсоединенные к блоку частоты вращения КП, тяговые электродвигатели (ТЭД), по два на каждую из двух тележек, блок управления устройством подачи песка, регулятор напряжения обмоток тягового электродвигателя, выполненный с четырьмя уровнями регулирования напряжения, выпрямительно-инверторный преобразователь (ВИП) установлен на каждой тележке для двух ее тяговых электродвигателей, каждый из которых снабжен двумя контакторами. Система управления ЭПС выполнена из микропроцессорного блока (МБ), блока управления контакторами, блока управления устройством подачи песка, причем выход блока частоты вращения КП соединен с первым входом микропроцессорного блока, вход-выход которого соединен с входом-выходом блока управления контакторами, первый выход МБ соединен с входами ВИП каждой из тележек, а второй выход МБ - с входом блока управления устройством подачи песка, третий выход соединен с входом регулятора напряжения обмоток ТЭД. ВИП подсоединен двумя цепями, соответственно, к обмоткам первого и второго тягового электродвигателя тележки. Выходы ВИП двух тележек соединены со вторым входом МБ, блок управления контакторами имеет четыре пары выходов, каждая из которых предназначена для замыкания или размыкания первого и второго контакторов ТЭД. Технический результат заключается в снижении расхода песка и экономии электрической энергии, питающей тяговые электродвигатели. 1 ил.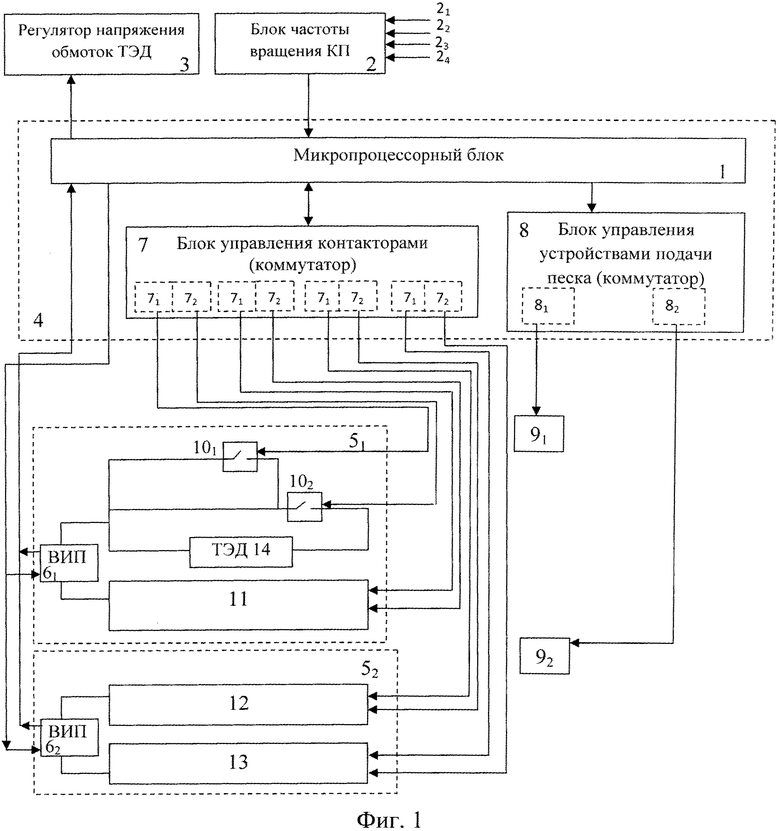
Устройство для защиты от боксования колесных пар электроподвижного состава, содержащее систему управления электроподвижным составом, датчики частоты колесной пары, установленные на каждой колесной паре, подсоединенные к блоку частоты вращения колесной пары, тяговые электродвигатели, по два на каждую из двух тележек, блок управления устройством подачи песка, первый выход которого подсоединен к первому устройству подачи песка на тележку, а второй выход - ко второму устройству подачи песка на тележку, отличающееся тем, что введены регулятор напряжения обмоток тягового электродвигателя, выполненный с четырьмя уровнями регулирования напряжения, выпрямительно-инверторный преобразователь, установленный на каждой тележке для двух ее тяговых электродвигателей, каждый из которых снабжен двумя контакторами, система управления электроподвижным составом выполнена из микропроцессорного блока, блока управления контакторами, выход блока частоты вращения колесной пары соединен с первым входом микропроцессорного блока, вход-выход которого соединен с входом-выходом блока управления контакторами, первый выход микропроцессорного блока соединен с входами выпрямительно-инверторных преобразователей каждой из тележек, а второй выход микропроцессорного блока - со входом блока управления устройством подачи песка, первый контактор установлен на первой обмотке тягового электродвигателя, а второй контактор - на второй его обмотке, выпрямительно-инверторный преобразователь подсоединен двумя цепями, соответственно, к обмоткам первого и второго тягового электродвигателя тележки, первой цепью - к первой обмотке первого тягового электродвигателя при замыкании его первого контактора, первой цепью - ко второй обмотке первого тягового электродвигателя при замыкании его второго контактора, второй цепью - к первой обмотке второго тягового электродвигателя при замыкании его первого контактора, второй цепью - ко второй обмотке второго тягового электродвигателя при замыкании его второго контактора, выходы выпрямительно-инверторных преобразователей двух тележек соединены со вторым входом микропроцессорного блока, третий выход которого соединен со входом регулятора напряжения обмоток тягового электродвигателя, блок управления контакторами имеет четыре пары выходов, каждая из которых предназначена для замыкания или размыкания первого и второго контакторов тягового электродвигателя, первый выход первой пары подсоединен ко входу первого контактора первого тягового электродвигателя первой тележки, а второй выход первой пары - ко входу второго контактора первого тягового электродвигателя первой тележки, первый выход второй пары подсоединен ко входу первого контактора второго тягового электродвигателя первой тележки, а второй выход второй пары - ко входу второго контактора второго тягового электродвигателя первой тележки, первый выход третьей пары подсоединен ко входу первого контактора первого тягового электродвигателя второй тележки, а второй выход третьей пары - ко входу второго контактора первого тягового электродвигателя второй тележки, первый выход четвертой пары подсоединен ко входу первого контактора второго тягового электродвигателя второй тележки, а второй выход четвертой пары - ко входу второго контактора второго тягового электродвигателя второй тележки.
| Диффузор непрерывного действия | 1939 |
|
SU65187A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ БОКСОВАНИЯ И ЮЗА КОЛЕСНО-МОТОРНЫХ БЛОКОВ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2010 |
|
RU2443577C1 |
| RU 99113767 A, 27.04.2001 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ ЛИКВИДАЦИИ БОКСОВАНИЯ И ЮЗА КОЛЕСНО-МОТОРНЫХ БЛОКОВ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2364525C2 |
| Дисковый лущильник | 1948 |
|
SU77580A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| US 6012011 A, 04.01.2000 | |||
| US 6634303 B1, 21.10.2003 | |||

