Изобретение относится к транспортным средствам и может быть использовано для обеспечения автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения.
Известен способ установки схождения управляемых колёс транспортного средства (А.с. СССР № 746242, G 01 M 17/06, опубл. 07.07.1980, Бюл. № 25), заключающийся в том, что непрерывно измеряют боковые силы, действующие на управляемые колёса транспортного средства, и непрерывно изменяют на одинаковую величину расстояния от каждого шкворня до продольной оси транспортного средства до устранения разности между боковыми силами на каждом управляемом колесе. Регулирование происходит до тех пор, пока разность боковых сил в пятне контакта управляемых колёс с дорогой не достигнет нуля, что соответствует оптимальному схождению управляемых колёс.
Недостатком известного способа является то, что он не учитывает инерционность системы регулирования, вследствие чего после достижения оптимального схождения управляемых колёс и прекращения процесса регулирования управляемые колёса будут продолжать некоторое время поворачиваться, что потребует нового цикла работы системы по устранению возникшего в результате перерегулирования обратного отклонения схождения, и т.д., что снижает эффективность регулирования схождения управляемых колёс в процессе движения.
Известны устройства (системы) для непрерывного автоматического регулирования схождения управляемых колёс транспортного средства в процессе движения (названия в различных вариантах различаются) (патент патент РФ 2309867, B 62 D 6/04; B 62 D 17/00; G 01 M 17/06, опубл. 10.11.2007, Бюл. № 31; патент РФ 348913, G 01 M 17/06; B 62 D 17/00, опубл. 10.03.2009, Бюл. № 7; патент РФ 2348914, G 01 M 17/06; B 62 D 17/00, опубл. 10.03.2009, Бюл. № 7; патент РФ 2349892, G 01 M 17/06; B 62 D 17/00, опубл. 20.03.2009, Бюл. № 8; патент РФ 2353912, G 01 M 17/06; B 62 D 17/00, опубл. 27.04.2009, Бюл. № 12; патент РФ 2362702, B 62 D 17/00, опубл. 27.07.2009, Бюл. № 21; патент РФ 2369857, G 01 M 17/06; B 62 D 17/00, опубл. 10.10.2009, Бюл. № 28; патент РФ 2387566, G 01 M 17/06; B 62 D 6/04, опубл. 27.04.2010, Бюл. № 12; патент РФ 2392157, G 01 M 17/06; B 62 D 6/04, опубл. 20.06.2010, Бюл. № 17; патент РФ 2392158, G 01 M 17/06; B 62 D 6/04, опубл. 20.06.2010, Бюл. № 17; патент РФ 2398701, B 62 D 6/04; G 01 M 17/06, опубл. 10.09.2010, Бюл. № 25; патент РФ 2398702, B 60 D 6/04; G 01 M 17/06, опубл. 10.09.2010, Бюл. № 25; патент РФ 2405704, B 62 D 6/04; G 01 M 17/06, опубл. 10.12.2010, Бюл. № 34; патент РФ 2405705, B 62 D 6/04; G 01 M 17/06, опубл. 10.12.2010, Бюл. № 34: патент РФ 2405706, B 62 D 6/04; G 01 M 17/06, опубл. 10.12.2010, Бюл. № 34; патент РФ 2405707, B 62 D 6/04; G 01 M 17/06, опубл. 10.12.2010, Бюл. № 34; патент РФ 2405708, B 62 D 6/04; G 01 M 17/06, опубл. 10.12.2010, Бюл. № 34; патент РФ 2410270, B 62 D 6/04; G 01 M 17/06, опубл. 27.01.2011, Бюл. № 3; патент РФ 2410271, B 62 D 6/04; G 01 M 17/06, опубл. 27.01.2011, Бюл. № 3; патент РФ 2410272, B 62 D 6/04; G 01 M 17/06, опубл. 27.01.2011, Бюл. № 3; патент РФ 2423273, B 62 D 6/04; G 01 M 17/06, опубл. 10.07.2011, Бюл. № 19; патент РФ 2423274, B 62 D 6/04; G 01 M 17/06, опубл. 10.07.2011, Бюл. № 19; патент РФ 2423275, B 62 D 6/04; G 01 M 17/06, опубл. 10.07.2011, Бюл. № 19; патент РФ 2423276, B 62 D 6/04; G 01 M 17/06, опубл. 10.07.2011, Бюл. № 19; патент РФ 2424147, B 62 D 6/04; G 01 M 17/06, опубл. 20.07.2011, Бюл. № 20; патент РФ 2424148, B 62 D 6/04; G 01 M 17/06, опубл. 20.07.2011, Бюл. № 20; патент РФ 2432287, B 62 D 6/04; G 01 M 17/06, опубл. 27.10.2011, Бюл. № 30, патент РФ 2432288, B 62 D 6/04; G 01 M 17/06, опубл. 27.10.2011, Бюл. № 30; патент РФ 2432289, B 62 D 6/04; G 01 M 17/06, опубл. 27.10.2011, Бюл. № 30; патент РФ 2432290, B 62 D 6/04; G 01 M 17/06, опубл. 27.10.2011, Бюл. № 30; патент РФ 2432291, B 62 D 6/04; G 01 M 17/06, опубл. 27.10.2011, Бюл. № 30; патент РФ 2471163, G 01 M 17/06, B 62 D 17/00, опубл. 27.12.2012, Бюл. № 36; патент РФ 2471164, G 01 M 17/06, B 62 D 17/00, опубл. 27.12.2012, Бюл. № 36; патент РФ 2471165, G 01 M 17/06, B 62 D 17/00, опубл. 27.12.2012, Бюл. № 36; патент РФ 2474508, B 62 D 6/04; G 01 M 17/06, опубл. 10.02.2013, Бюл. № 4; патент РФ 2474509, B 62 D 6/04; G 01 M 17/06, опубл. 10.02.2013, Бюл. № 4; патент РФ 2603701, G 01 M 17/06, опубл. 27.11.2016, Бюл. № 33; патент РФ 2653662, B 62 D 17/00; G 01 M 17/06, опубл. 11.05.2018, Бюл. № 14; патент РФ 2654653, B 62 D 6/04; G 01 M 17/06, опубл. 21.05.2018, Бюл. № 15; патент РФ 2654658, B 62 D 6/04; G 01 M 17/06, опубл. 21.05.2018, Бюл. № 15; патент РФ 2656805, G 01 M 17/06; B 62 D 6/04, опубл. 06.06.2018, Бюл. № 16; патент РФ 2660165, B 62 D 6/04; G 01 M 17/06, опубл. 05.07.2018, Бюл. № 19; патент РФ 2662381, B 62 D 6/04; G 01 M 17/06, опубл. 25.07.2018, Бюл. № 21; патент РФ 2666885, B 62 D 17/00; G 01 M 17/06, опубл. 12.09.2018, Бюл. № 26), реализующие единую концепцию, но различающиеся конструкцией отдельных узлов и элементов. Однако все без исключения варианты запатентованных устройств сами по себе не способны учесть инерционность системы регулирования, вследствие чего после достижения оптимального схождения управляемых колёс и прекращения процесса регулирования управляемые колёса будут продолжать некоторое время поворачиваться, что потребует нового цикла работы системы по устранению возникшего в результате перерегулирования обратного отклонения схождения, и т.д., что снижает эффективность регулирования схождения управляемых колёс в процессе движения.
Наиболее близким по технической сущности к предлагаемому способу является способ автоматической установки схождения управляемых колёс в процессе движения (патент РФ № 2333470, G 01 M 17/06, опубл. 10.09.2008, Бюл. № 25), заключающийся в том, что непрерывно измеряют и сравнивают с помощью электрического моста между собой боковые силы, действующие на управляемые колёса, и дисбаланс моста вызывает подачу напряжения на катушку привода, и его устраняют реверсивным механизмом изменения рабочей длины поперечной рулевой тяги, причём привод, воздействующий на золотник распределительного устройства, включают импульсно, и после каждого включения золотник распределительного устройства возвращается в среднее положение. Продолжительность включения составляет от 0,1 до 0,5 с, а паузы - от 0,5 до 1,5 с и зависит от величины дисбаланса и скорости движения транспортного средства.
Недостатком известного способа является то, что заявляемая зависимость продолжительности включения привода, воздействующего на золотник распределительного устройства, от 0,1 до 0,5 с, и паузы между включениями от 0,5 до 1,5 с от величины дисбаланса и скорости движения автотранспортного средства не подтверждается расчётами. В результате, вследствие отсутствия учёта условий и режимов движения автотранспортного средства и инерционности системы регулирования, возможны недорегулирование или перерегулирование схождения управляемых колёс, что снижает эффективность его регулирования в процессе движения.
Для учёта инерционности элементов разработанной системы для непрерывного автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения при регулировании схождения и определения её пороговых значений были проведены расчётные исследования с целью выявления зависимостей параметров системы от состояния автотранспортного средства и условий и режимов движения. Было предложено процесс регулирования (восстановления оптимального схождения) условно представить протекающим в две фазы: силового восстановления части отклонения текущего схождения от оптимального за счет воздействия исполнительного механизма и инерционного дорегулирования до оптимального схождения за счёт инерции элементов системы. Зависимости были получены для следующих режимов движения автотранспортного средства: равномерное движение, разгон, движение на подъёме, торможение, движение накатом (Рассоха В.И., Исайчев В.Т. Совершенствование системы активного регулирования схождения управляемых колёс автотранспортных средств: монография [Электронное издание]. - Оренбург: ОГУ, 2023).
На фигурах 1-5 приведены расчётные схемы для указанных режимов движения автотранспортного средства, а в таблице 1 - полученные зависимости.
Таблица 1
tи = {2 δ mк·а (P b - Рf a) / P b Рf }1/2;
δр = δ Go mp·f а / 2 P b;
δи = δ (P b - Рf a) / P b.
δи = δ [P b ŋрм - а (Gк Sinα - Рf )] / P b.
δи = δ [P b - a (Рf + mк j)] / P b.
δи = 2 δ a [P b ŋрм - a (0,5 Go mp f + Рf - mк j)] / P b.
δи = δ (Gк j а - Рf а + Р b ηрм) / P b.
tp - время фазы силового восстановления схождения управляемых колёс за счёт действия исполнительного механизма;
δ - угол отклонения схождения управляемых колёс от оптимального положения;
Go - вес автотранспортного средства, приходящийся на управляемую ось; Go = m g, где m - масса автотранспортного средства, приходящаяся на управляемую ось; g - ускорение свободного падения;
mр - коэффициент перераспределения нормальных реакций дороги на управляемое колесо;
f - коэффициент сопротивления качению; f = f0 (1 + V2 / 20000), где f0 - коэффициент, зависящий от дорожного покрытия; V - скорость движения автотранспортного средства;
mк - масса управляемого колеса в сборе с осью;
а - расстояние от центра поворота до средней плоскости управляемых колёс;
Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р - давление рабочей жидкости в системе; dц - рабочий диаметр гидроцилиндра исполнительного механизма;
b - расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
tи - время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления оптимального схождения управляемых колёс;
δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма;
δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы;
Рf - сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z - нормальная реакция дороги на управляемое колесо, Z = Go / (mр Cosα);
ηрм - коэффициент полезного действия шкворневого узла;
Gк - вес управляемого колеса в сборе с осью;
α - угол подъёма дороги;
j - ускорение автотранспортного средства.
Техническим результатом предлагаемого способа является повышение эффективности регулирования схождения управляемых колёс автотранспортных средств в процессе движения.
Указанный технический результат достигается тем, что в способе автоматического регулирования схождения управляемых колёс в процессе движения, заключающемся в том, что непрерывно измеряют и сравнивают с помощью электрического моста между собой боковые силы, действующие на управляемые колёса, и дисбаланс моста вызывает подачу напряжения на катушку привода и его устраняют реверсивным механизмом изменения рабочей длины поперечной рулевой тяги, причём привод, воздействующий на золотник распределительного устройства, включают импульсно и после каждого включения золотник распределительного устройства возвращается в среднее положение, отличие состоит в том, что автотранспортное средство снабжено датчиками любой конструкции и принципа действия, способными идентифицировать режим движения автотранспортного средства (равномерное движение, разгон, движение на подъёме, торможение, движение накатом), а привод, воздействующий на золотник распределительного устройства, включают при достижении рассогласования между боковыми силами порогового значения, а отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени инерционного дорегулирования, зависящий от режима и условий движения автотранспортного средства (равномерное движение, разгон, накат, движение на подъёме, торможение).
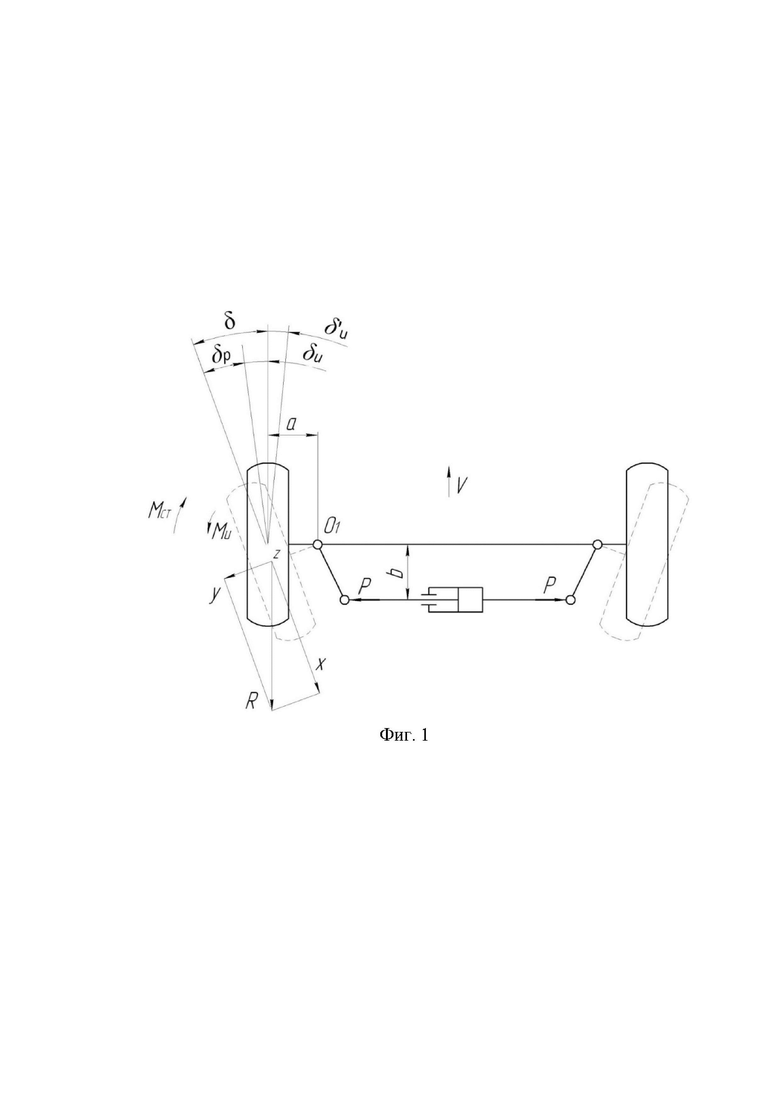
На фиг. 1 показана расчётная схема для режима равномерного движения автотранспортного средства, где Ми - инерционный момент управляемых колёс; Мст - стабилизирующий момент; Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; X - касательная реакция дороги на управляемое колесо; Y - боковая реакция дороги на управляемое колесо; R - суммарная реакция дороги на колесо, действующая в плоскости дороги; а - расстояние от центра поворота до средней плоскости управляемых колёс; b - расстояние от оси поперечной тяги до центра поворота управляемых колёс с осью; О1 - центр поворота управляемого колеса; δ - угол отклонения схождения управляемых колёс от оптимального положения; δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма системы; δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы; δ’и - угол возможного «перерегулирования» схождения управляемых колёс за счёт инерционности элементов системы в случае прекращения воздействия исполнительного механизма в момент достижения оптимального схождения; V - скорость движения автотранспортного средства;
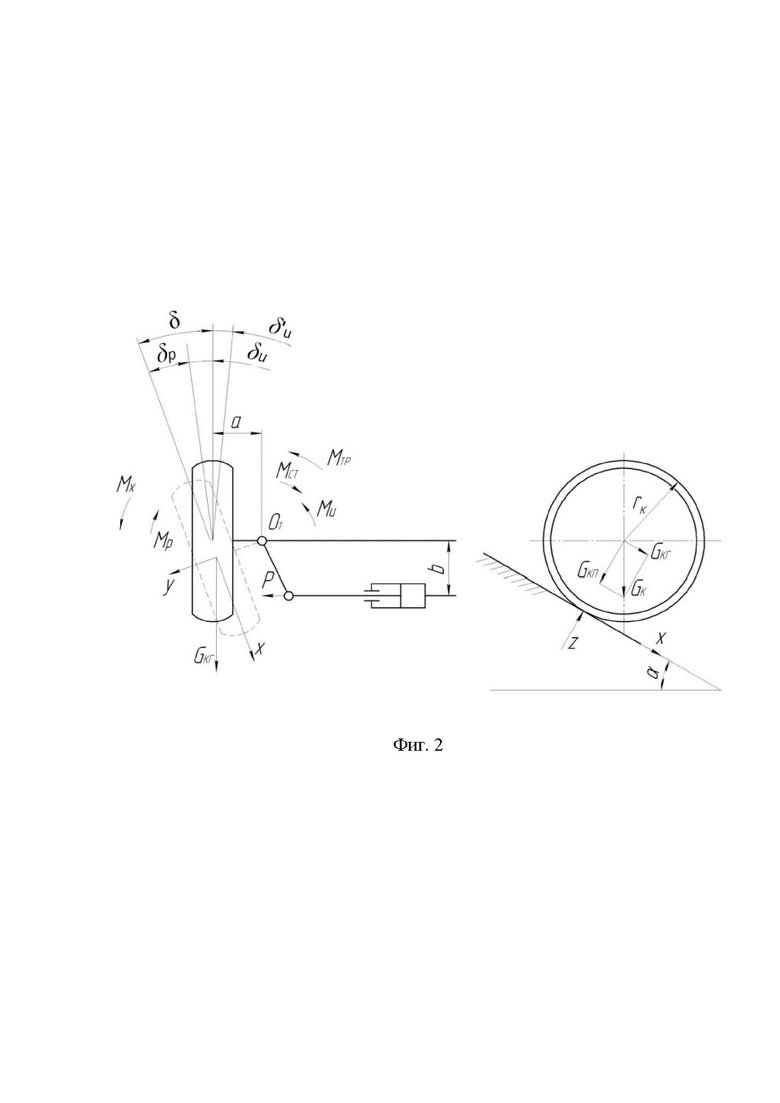
на фиг. 2 - расчётная схема для режима движения автотранспортного средства на подъёме, где Ми - инерционный момент управляемых колёс; Мх - момент, создаваемый касательной реакцией дороги на управляемое колесо; Мст - стабилизирующий момент; Мтр - момент трения в шкворневом соединении; Мр - момент от усилия в гидроцилиндре поперечной рулевой тяги; Gк - вес управляемого колеса в сборе; Gкг и Gкп - составляющие веса управляемого колеса в сборе, действующие параллельно и перпендикулярно поверхности дороги; α - угол подъёма дороги; rк - радиус качения управляемых колёс; X - касательная реакция дороги на управляемое колесо; Y - боковая реакция дороги на управляемое колесо; Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; а - расстояние от центра поворота до средней плоскости управляемых колёс; b - расстояние от оси поперечной тяги до центра поворота управляемых колёс с осью; О1 - центр поворота управляемого колеса; δ - угол отклонения схождения управляемых колёс от оптимального положения; δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма системы; δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы; δ’и - угол возможного «перерегулирования» схождения управляемых колёс за счёт инерционности элементов системы в случае прекращения воздействия исполнительного механизма в момент достижения оптимального схождения;
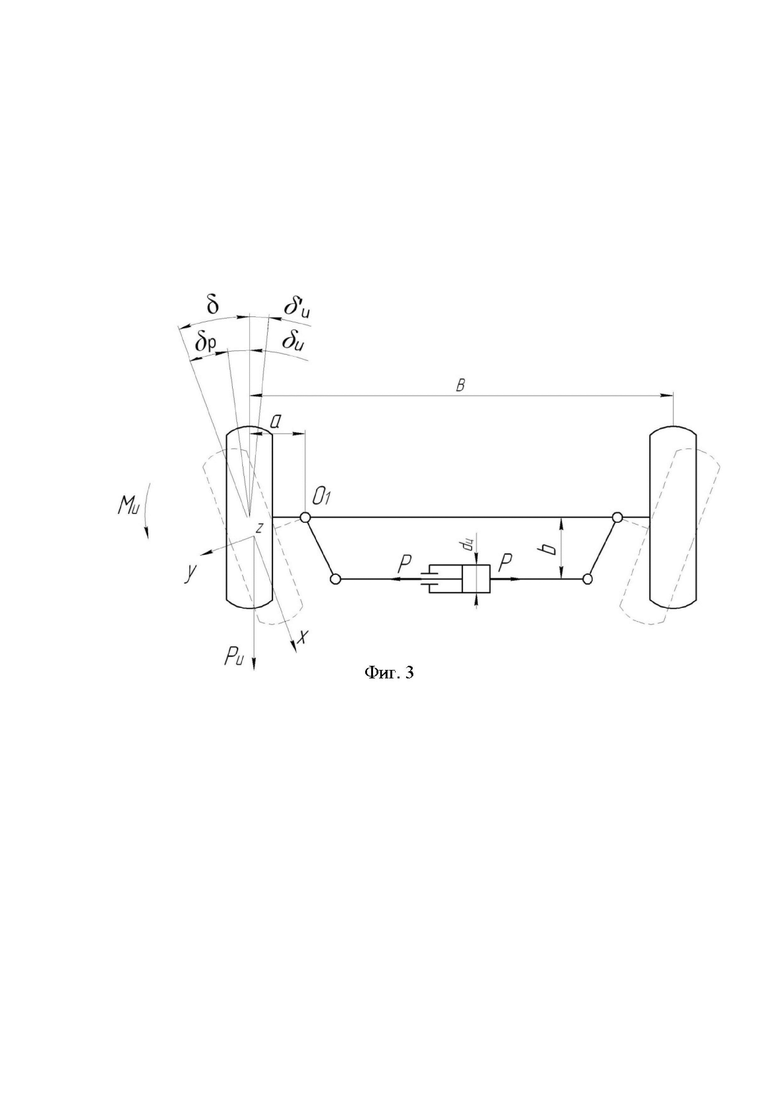
на фиг. 3 - расчётная схема для режима разгона автотранспортного средства, где Ми - инерционный момент управляемых колёс; Рu - сила инерции управляемого колеса с осью и поворотным кулаком в сборе; Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; X - касательная реакция дороги на управляемое колесо; Y - боковая реакция дороги на управляемое колесо; а - расстояние от центра поворота до средней плоскости управляемых колёс; b - расстояние от оси поперечной тяги до центра поворота управляемых колёс с осью; О1 - центр поворота управляемого колеса; δ - угол отклонения схождения управляемых колёс от оптимального положения; δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма системы; δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы; δ’и - угол возможного «перерегулирования» схождения управляемых колёс за счёт инерционности элементов системы в случае прекращения воздействия исполнительного механизма в момент достижения оптимального схождения;
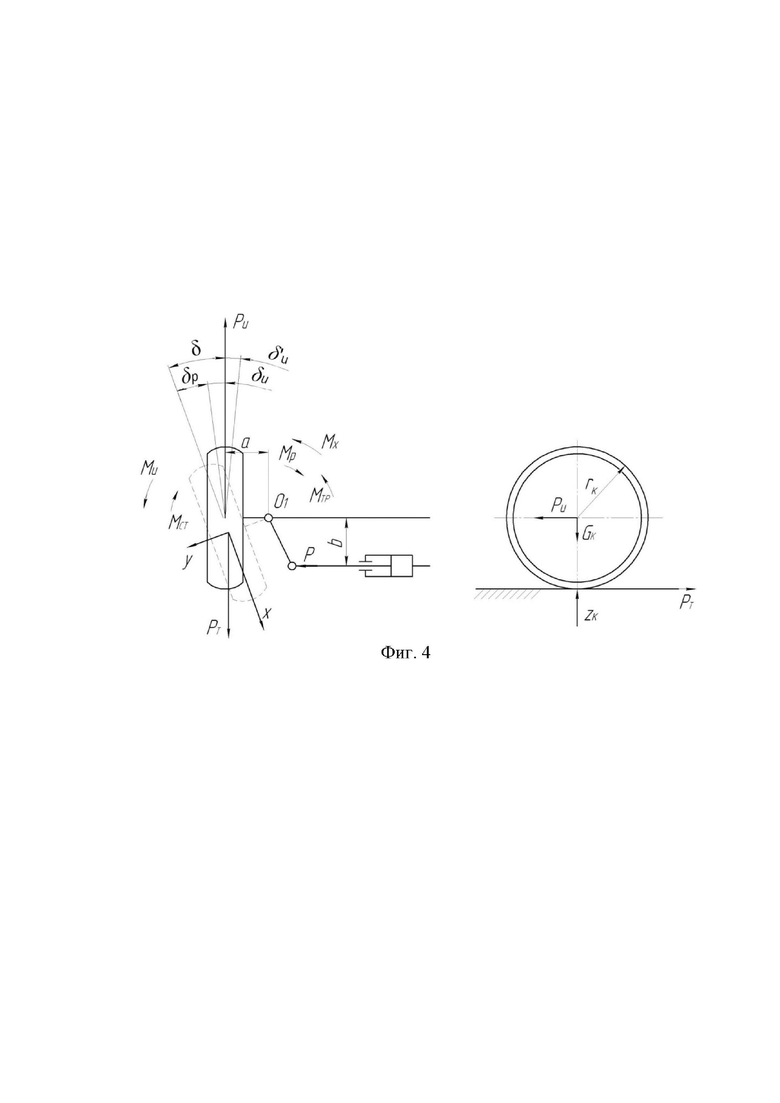
на фиг. 4 - расчётная схема для режима торможения автотранспортного средства, где Ми - инерционный момент управляемых колёс; Мх - момент, создаваемый касательной реакцией дороги на управляемое колесо; Мст - стабилизирующий момент; Мтр - момент трения в шкворневом соединении; Мр - момент от усилия в гидроцилиндре поперечной рулевой тяги; Рт - тормозная сила на колесе; Рu - сила инерции управляемого колеса с осью и поворотным кулаком в сборе; Gк - вес управляемого колеса в сборе; rк - радиус качения управляемых колёс; X - касательная реакция дороги на управляемое колесо; Y - боковая реакция дороги на управляемое колесо; Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; а - расстояние от центра поворота до средней плоскости управляемых колёс; b - расстояние от оси поперечной тяги до центра поворота управляемых колёс с осью; О1 - центр поворота управляемого колеса; δ - угол отклонения схождения управляемых колёс от оптимального положения; δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма системы; δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы; δ’и - угол возможного «перерегулирования» схождения управляемых колёс за счёт инерционности элементов системы в случае прекращения воздействия исполнительного механизма в момент достижения оптимального схождения;
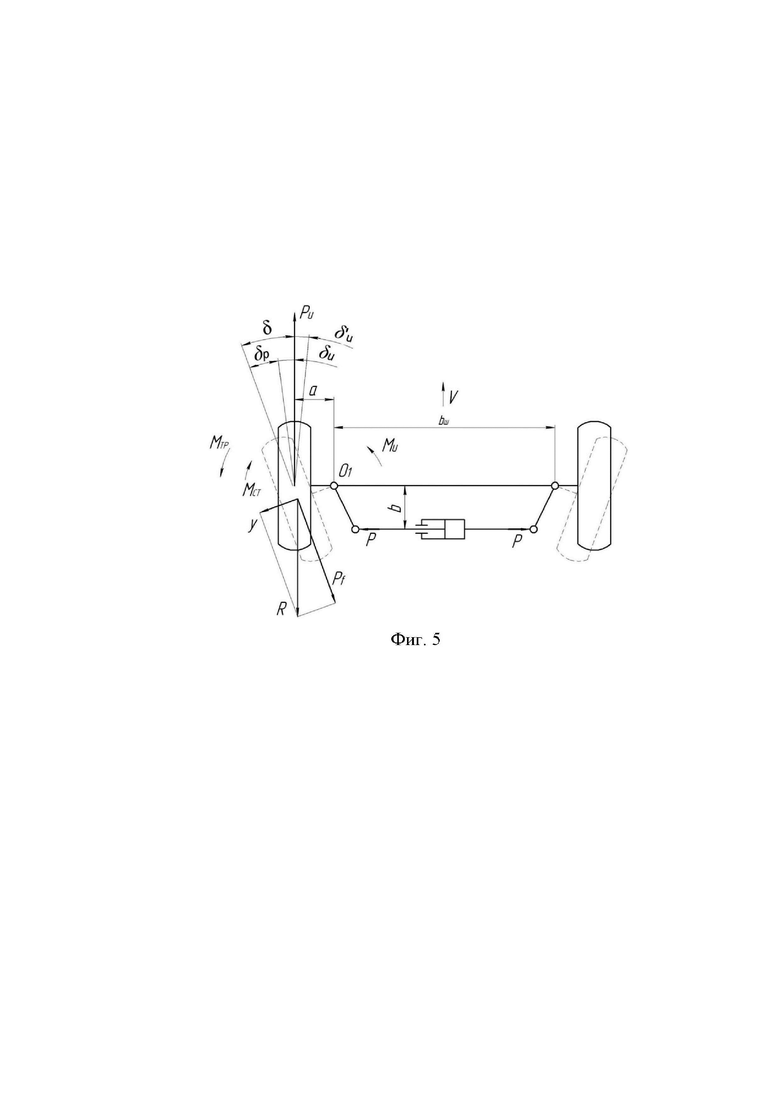
на фиг. 5 - расчётная схема для режима движения автотранспортного средства накатом, где обозначено Ми - инерционный момент управляемых колёс; Мст - стабилизирующий момент; Мтр - момент трения в шкворневом соединении; Рu - сила инерции управляемого колеса с осью и поворотным кулаком в сборе; Рf - сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо; Y - боковая реакция дороги на управляемое колесо; R - суммарная реакция дороги на колесо, действующая в плоскости дороги; Р - усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; а - расстояние от центра поворота до средней плоскости управляемых колёс; b - расстояние от оси поперечной тяги до центра поворота управляемых колёс с осью; О1 - центр поворота управляемого колеса; δ - угол отклонения схождения управляемых колёс от оптимального положения; δр - угол силового восстановление части отклонения схождения управляемых колёс от оптимального за счёт воздействия исполнительного механизма системы; δи - угол инерционного дорегулирования до оптимального схождения управляемых колёс за счёт инерции элементов системы; δ’и - угол возможного «перерегулирования» схождения управляемых колёс за счёт инерционности элементов системы в случае прекращения воздействия исполнительного механизма в момент достижения оптимального схождения; V - скорость движения автотранспортного средства;
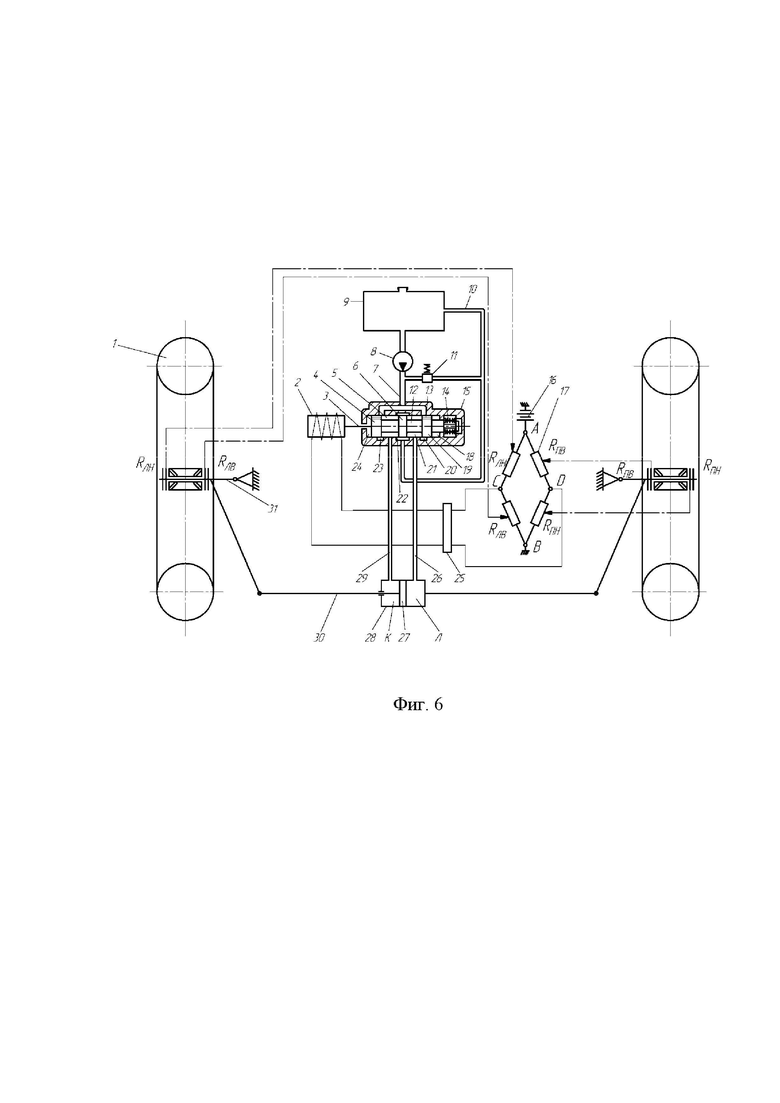
на фиг. 6 - общая схема устройства для реализации способа автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения, где показано 1 - управляемое колесо; 2 - электромагнитная катушка; 3 - сердечник электромагнитной катушки; 4, 6 и 19 - пояски золотника; 5 и 21 - камеры распределительного устройства; 7, 10, 26 и 29 - маслопроводы; 8 - гидравлический насос; 9 - бачок гидравлического насоса; 11 - предохранительный клапан; 12 - золотник; 13 - каналы распределительного устройства; 14 - центрирующая пружина; 15 - корпус распределительного устройства; 16 - источник электропитания; 17 - электрический мост; 18 и 24 - реактивные камеры распределительного устройства; 20, 22 и 23 - окна распределительного устройства; 25 - усилитель электрического сигнала; 27 - поршень исполнительного механизма; 28 - исполнительный механизм; 30 - поперечная рулевая тяга; К и Л - полости исполнительного механизма;
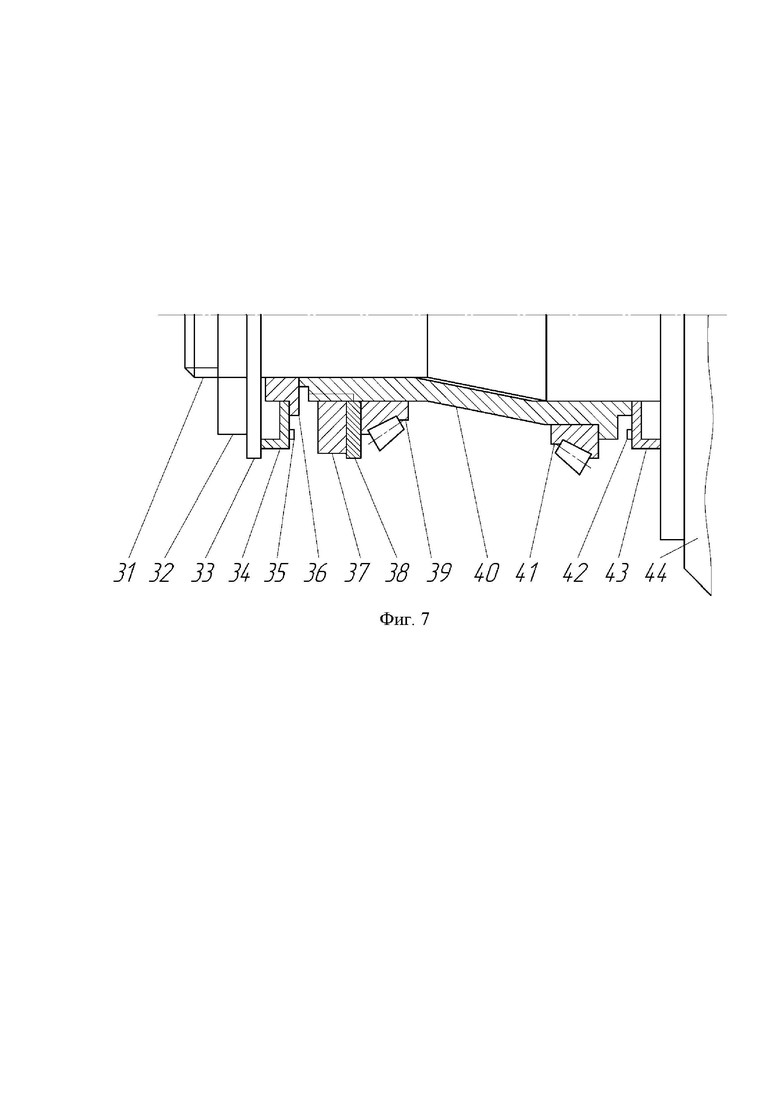
на фиг. 7 - ось управляемых колёс автотранспортного средства в сборе, где показано обозначено 31 - ось управляемого колеса; 32 - гайка крепления втулки; 33 и 38 - шайбы; 34 и 43 - наружное и внутреннее кольца; 35 и 42 - тензодатчики; 36 - вставка; 37 - регулировочная гайка; 39 и 41 - подшипники; 40 - втулка; 44 - поворотный кулак.
Выполнение регулирования согласно предлагаемому способу осуществляется в следующей последовательности: привод, воздействующий на золотник распределительного устройства, включается управляющим устройством при достижении рассогласования между боковыми силами порогового значения; при этом управляющее устройство по показаниям датчиков идентифицирует режим движения автотранспортного средства (равномерное движение, разгон, движение на подъёме, торможение, движение накатом), рассчитывает время регулирующего воздействия, необходимое для обеспечения требуемого схождения управляемых колёс и, в зависимости от режима и условий движения автотранспортного средства определяет момент времени, в который регулирующее действие необходимо прекратить, чтобы за счет инерционного дорегулирования обеспечить требуемое схождение управляемых колёс.
Реализацию предлагаемого способа рассмотрим на примере базового варианта системы автоматического регулирования схождения управляемых колёс в движении с тензодатчиками (патент РФ 2348913, G 01 M 17/06; B 62 D 17/00, опубл. 10.03.2009, Бюл. № 7). В других вариантах системы реализация способа будет аналогичной, отличаясь лишь частными особенностями конкретных устройств.
На ось 31 управляемого колеса 1 автотранспортного средства, переходящую в поворотный кулак 44, посажены наружное 34 и внутреннее 43 кольца, на торцевых поверхностях которых установлены соответственно датчики 35 и 42 боковой реакции дороги на колесо, а также вставка 36 и втулка 40, которая крепится гайкой 32 с шайбой 33. Зазор в подшипниках регулируется гайкой 37 с шайбой 38.
Датчики 35 и 42 боковой реакции дороги на колесо выполнены в виде тензорезисторов, имеют одинаковые электрические сопротивления и соединены вместе с тензодатчиками другого управляемого колеса автотранспортного средства в электрический мост 17. Точки А и В электрического моста 17 соединены с источником электропитания 16, а точки С и D - через усилитель электрического сигнала 25 - с электромагнитной катушкой 2.
Боковая реакция дороги на колесо через шину, диск, ступицу колеса, наружную и внутреннюю обоймы подшипников, их тела качения, втулку 40 передается на кольца 34 и 43, вызывая их деформацию, и тем самым - деформацию и электрическое сопротивление установленных на кольцах тензодатчиков 35 и 42. Сердечник 3 электромагнитной катушки 2 связан с золотником 12 распределительного устройства рабочей жидкости, имеющим три пояска 4, 6 и 19, а в корпусе 15 - три окна 20, 22 и 23. К окнам 20 и 23 рабочая жидкость подводится от гидравлического насоса 8, оснащенного предохранительным клапаном 11. К окну 22 подключен трубопровод 10, по которому жидкость сливается в бачок 9 гидронасоса.
Между поясками золотника образуются камеры 5 и 21, соединенные каналами 13 с реактивными камерами 18 и 24. Между шайбами, опирающимися на корпус 15 и золотник 12, установлена центрирующая пружина 14. Исполнительный механизм 28 представляет собой гидравлический цилиндр двухстороннего действия, изменяющий длину поперечной рулевой тяги 30 и, следовательно, схождение управляемых колёс. Поршень 27 делит внутренний объем исполнительного механизма на две полости - К и Л, к которым подведены маслопроводы 29 и 26 от камер 21 и 5 распределительного устройства рабочей жидкости.
Питается система от бортовой электрической сети автотранспортного средства. В качестве гидронасоса и ёмкости с рабочей жидкостью системы, с целью упрощения конструкции и уменьшения стоимости, могут быть использованы элементы системы гидроусилителя рулевого управления, гидроподъемника кузова и т.д.
За критерий правильности схождения управляемых колёс автотранспортного средства принята боковая реакция дороги на колесо. Если она равна нулю - схождение правильное, если отличается от нуля - необходимо корректирование.
Способ реализуется следующим образом.
При прямолинейном движении автотранспортного средства и оптимальном схождении его управляемых колёс боковые реакции дороги на эти колёса отсутствуют, а сопротивления тензодатчиков равны между собой, падения напряжения на них одинаковы, поэтому напряжение, снимаемое с точек С и D электрического моста 17 на электромагнитную катушку 2, равно нулю. Золотник 12 распределительного устройства находится в нейтральном положении, при котором все три окна 20, 22 и 23 открыты. Жидкость от гидравлического насоса 8 через трубопровод 7 поступает в камеры 5 и 21 распределительного устройства, откуда по трубопроводу 10 сливается в бачок 9 насоса. Давление жидкости, установившееся в камерах 5 и 21, передается через жидкость в трубопроводах 29 и 26 в полости К и Л исполнительного механизма.
При отклонении схождения управляемых колёс в отрицательную сторону управляемые колёса за счёт внутренних боковых реакций дороги через подшипники и втулки начинают воздействовать на наружные электрические датчики Rлн и Rпн и увеличивать их электрическое сопротивление. Электрическое сопротивление ветвей электрического моста также возрастает. Электрический ток в правой (Rпн и Rпв) и левой (Rлн и Rлв) ветвях моста одинаково уменьшается. При этом величина падения напряжения на внешних электрических датчиках (Rлн и Rпн) растет, а на внутренних датчиках (Rлв и Rпв) боковой реакции дороги - снижается. В итоге положительный потенциал в точке D будет больше, чем в точке С, то есть между точками С и D появляется электрическое напряжение, по электромагнитной катушке начинает течь ток. При достижении рассогласования между боковыми силами порогового значения сердечник электромагнитной катушки втягивается и, преодолевая сопротивление пружины 14, перемещает золотник распределительного устройства влево. В результате камера 21 отключается от сливного маслопровода 10 и через открытое окно 18 оказывается соединенной только с нагнетательным трубопроводом 26. Одновременно камера 5 будет отключена от трубопровода 29, а через открытое окно 22 будет соединена только со сливным трубопроводом 10. Давление жидкости в камере 21 и полости Л исполнительного механизма возрастает; поршень 27 со штоком перемещается влево. При этом в увеличивающуюся полость Л рабочая жидкость будет подаваться насосом 8, а из уменьшающейся полости К - вытесняться поршнем в сливной бачок насоса. Перемещающийся поршень 27 увеличивает длину поперечной рулевой тяги 30, восстанавливая правильное схождение управляемых колёс.
Привод, воздействующий на золотник распределительного устройства, отключается управляющим устройством до достижения оптимального значения схождения управляемых колёс на промежуток времени инерционного дорегулирования, зависящий от режима и условий движения автотранспортного средства (равномерное движение, разгон, движение на подъёме, торможение, движение накатом). Время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс, рассчитывается по полученным зависимостям.
При отсутствии воздействия сердечника электромагнитной катушки на золотник, он под действием пружины 14 возвращается в нейтральное положение. При этом окно 23 откроется, давления рабочей жидкости в полостях К и Л исполнительного механизма станут равными, поршень 27 остановится, и поперечная рулевая тяга перестанет удлиняться.
При отклонении схождения в положительную сторону возникают внешние боковые реакции дороги на управляемые колёса, которые воздействуют теперь уже на внутренние электрические датчики Rлв и Rпв и увеличивают их электрическое сопротивление и сопротивление ветвей моста. Величина электрического тока в ветвях моста уменьшается, падение напряжения на датчиках Rлв и Rпв увеличивается, а на датчиках Rлн и Rпн - уменьшается. При этом в точке D положительный потенциал будет меньше, чем в точке С. Между этими точками электрического моста возникает электрическое напряжение противоположной полярности. По электромагнитной катушке течёт ток; её сердечник перемещает золотник распределительного устройства вправо. Роль камер 5 и 23 распределительного устройства меняется на противоположную, длина поперечной рулевой тяги под действием давления жидкости в полости К исполнительного механизма уменьшается, и схождение управляемых колёс восстанавливается.
Таким образом, предлагаемый способ автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения повышает точность регулирования параллельности плоскостей вращения управляемых колёс при различных режимах и условиях движения автотранспортного средства, что способствует минимальному износу шин, снижению сопротивления движению и расходу топлива.
Изобретение относится к транспортным средствам. Способ автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения заключается в том, что непрерывно измеряют и сравнивают с помощью электрического моста между собой боковые силы, действующие на управляемые колеса. Дисбаланс моста вызывает подачу напряжения на катушку привода и его устраняют реверсивным механизмом изменения рабочей длины поперечной рулевой тяги. Привод, воздействующий на золотник распределительного устройства, включают импульсно, и после каждого включения золотник распределительного устройства возвращается в среднее положение. Регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени инерционного дорегулирования, зависящий от режима и условий движения автотранспортного средства. Достигается повышение точности регулирования параллельности плоскостей вращения управляемых колёс при различных режимах и условиях движения. 5 з.п. ф-лы, 7 ил., 1 табл.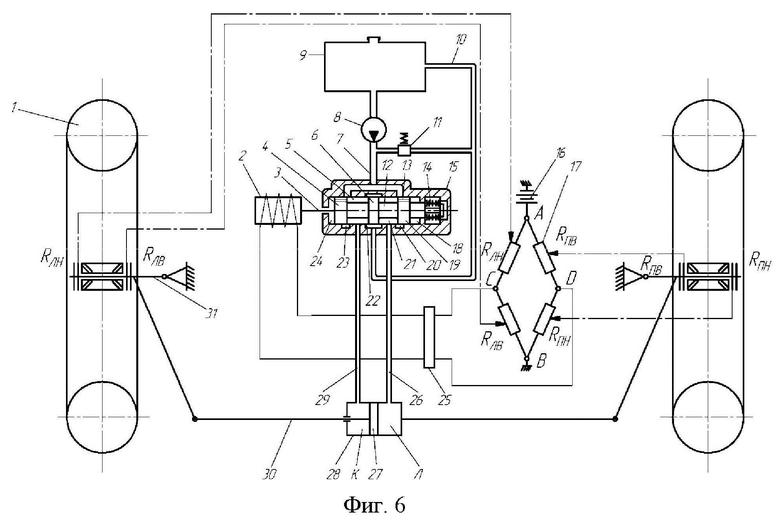
1. Способ автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения, заключающийся в том, что непрерывно измеряют и сравнивают с помощью электрического моста между собой боковые силы, действующие на управляемые колеса, и дисбаланс моста вызывает подачу напряжения на катушку привода и его устраняют реверсивным механизмом изменения рабочей длины поперечной рулевой тяги, причём привод, воздействующий на золотник распределительного устройства, включают импульсно, и после каждого включения золотник распределительного устройства возвращается в среднее положение, отличающийся тем, что для повышения эффективности регулирования схождения регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени инерционного дорегулирования, зависящий от режима и условий движения автотранспортного средства.
2. Способ по п. 1, отличающийся тем, что для режима равномерного движения автотранспортного средства регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени, определяемый по зависимости:
tи = {2 δ mк⋅а (P b – Рf a) / P b Рf }1/2,
где: tи – время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс;
δ – угол отклонения схождения управляемых колёс от оптимального положения;
mк – масса управляемого колеса в сборе с осью;
а – расстояние от центра поворота до средней плоскости управляемых колёс;
Р – усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р – давление рабочей жидкости в системе;
dц – рабочий диаметр гидроцилиндра исполнительного механизма;
b – расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
Рf – сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z – нормальная реакция дороги на управляемое колесо, Z = Gо / (mр Cosα).
3. Способ по п. 1, отличающийся тем, что для режима движения автотранспортного средства на подъёме регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени, определяемый по зависимости:
tи = {2 δ [P b ηрм – а (Gк Sinα – Рf )] / P b [а (Gк Sinα + Рf ) + P b (1 – ŋрм)]}1/2,
где: tи – время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс;
δ – угол отклонения схождения управляемых колёс от оптимального положения;
Р – усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р – давление рабочей жидкости в системе;
dц – рабочий диаметр гидроцилиндра исполнительного механизма;
b – расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
ηрм – коэффициент полезного действия шкворневого узла;
а – расстояние от центра поворота до средней плоскости управляемых колёс;
G к – вес управляемого колеса в сборе с осью;
α – угол подъёма дороги;
Рf – сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z – нормальная реакция дороги на управляемое колесо, Z = Gо / (mр Cosα).
4. Способ по п. 1, отличающийся тем, что для режима разгона автотранспортного средства регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени, определяемый по зависимости:
tи = {2 δ [P b – a (Рf + mк j)] (Рf + mк j) / P b mк a)}1/2,
где: tи – время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс;
δ – угол отклонения схождения управляемых колёс от оптимального положения;
Р – усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р – давление рабочей жидкости в системе;
dц – рабочий диаметр гидроцилиндра исполнительного механизма;
b – расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
а – расстояние от центра поворота до средней плоскости управляемых колёс;
Рf – сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z – нормальная реакция дороги на управляемое колесо, Z = Gо / (mр Cosα);
mк – масса управляемого колеса в сборе с осью;
j – ускорение автотранспортного средства.
5. Способ по п. 1, отличающийся тем, что для режима торможения автотранспортного средства регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени, определяемый по зависимости:
tи = {2 δ mк a2 [P b ηрм – a (0,5 Gо mp f + Рf – mк j)]) / P b [a (0,5 Gо mp f + Рf – mк j)] + Р b (1 – ηрм)}1/2,
где: tи – время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс;
δ – угол отклонения схождения управляемых колёс от оптимального положения;
mк – масса управляемого колеса в сборе с осью;
а – расстояние от центра поворота до средней плоскости управляемых колёс;
Р – усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р – давление рабочей жидкости в системе;
dц – рабочий диаметр гидроцилиндра исполнительного механизма;
b – расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
ηрм – коэффициент полезного действия шкворневого узла;
Gо – вес автотранспортного средства, приходящийся на управляемую ось; Gо = m g, где m – масса автомобиля, приходящаяся на управляемую ось; g – ускорение свободного падения;
mр – коэффициент перераспределения нормальных реакций дороги на колесо;
f – коэффициент сопротивления качению; f = f0 (1 + V2 / 20000), где f0 – коэффициент, зависящий от дорожного покрытия; V – скорость движения автотранспортного средства;
Рf – сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z – нормальная реакция дороги на управляемое колесо, Z = Gо / (mр Cosα);
j – ускорение автотранспортного средства.
6. Способ по п. 1, отличающийся тем, что для режима движения автотранспортного средства накатом регулирующее воздействие отключают до достижения оптимального значения схождения управляемых колёс на промежуток времени, определяемый по зависимости:
tи = {2 δ (Gк j а – Рf а + Р b ηрм)⋅mк⋅а2 / P b [Рf а – Gк j а + Р b (1 – ηрм)]}1/2,
где: tи – время фазы инерционного дорегулирования, за которое нужно прекратить силовое воздействие исполнительного механизма для восстановления правильного схождения управляемых колёс;
δ – угол отклонения схождения управляемых колёс от оптимального положения;
G к – вес управляемого колеса в сборе с осью;
j – ускорение автотранспортного средства;
а – расстояние от центра поворота до средней плоскости управляемых колёс;
Рf – сила сопротивления качению, лежащая в плоскости дороги и средней плоскости управляемого колеса, являющаяся касательной реакцией дороги на управляемое колесо Рf = Z f, где Z – нормальная реакция дороги на управляемое колесо, Z = Gо / (mр Cosα);
Р – усилие, создаваемое исполнительным механизмом в поперечной рулевой тяге; Р = p π dц2 / 4, где р – давление рабочей жидкости в системе; dц – рабочий диаметр гидроцилиндра исполнительного механизма;
b – расстояние от оси поперечной рулевой тяги до центра поворота управляемых колёс с осью;
ηрм – коэффициент полезного действия шкворневого узла;
mк – масса управляемого колеса в сборе с осью.
| СПОСОБ АВТОМАТИЧЕСКОЙ УСТАНОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2006 |
|
RU2333470C2 |
| JP 2005315882 A, 10.11.2005 | |||
| US 2012025477 A1, 02.02.2012 | |||
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2015 |
|
RU2603701C1 |

