(S) СПОСОБ УСТАНОВКИ-СХОЖДЕНИЯ УПРАВЛЯЕШХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к транспортным средствам и ожет быть приf манено при проверке технического состояния переднего моста автомобиля, а также для обеспечения мини-, 5 мального износа шин при работе транспортногб средства.
Известен способ установки схождения управляемых колес транспОртнЬго средства, поворотных относительно 10 шкворней и кинематически связанных рулевой трапецией, заключающийся в том, что непрерывно измеряютбоковые силы, действующие на управляемые колеса 1 .15
Недостатком известного способа является невозможность восстановления схождения до оптимального значения при нарушении схождения, возникающем в процессе движения 20 автомобиля по дорогам. Это связано с тем, что при изменении схождения путем регулирования рабочей длины поперечной рулевой тяги угол схождения каждого колеса будет неопреде- 25 ленным, так как он будет зависеть от силы сопротивления повороту управляемого колеса, на величину которой будут оказывать влияние условия сцепления колеса с грунтом, 30
различные под каждым колесом автомобиля. Эти обстоятельства приводят к увеличению износГа шин.
Цель изобретения - установка колес транспортного средства на оптимальный угол.
Цель достигается тем, что непрерывно изменяют на одинаковую величину расстояниё от каждого шкворня до продольной оси транспортного средства до устранения разности между боковыми силами на каждом управляемом колесе. Изменение расстояния от каждого шкворня до продольной оси транспортного средства осуществляют под действием боковых сил на каждое колесо. При этом способе установки схождения боковые силы на обоих колесах будут равны, что обеспечивает их равную износостойкость и .увеличивает срок службы шин.
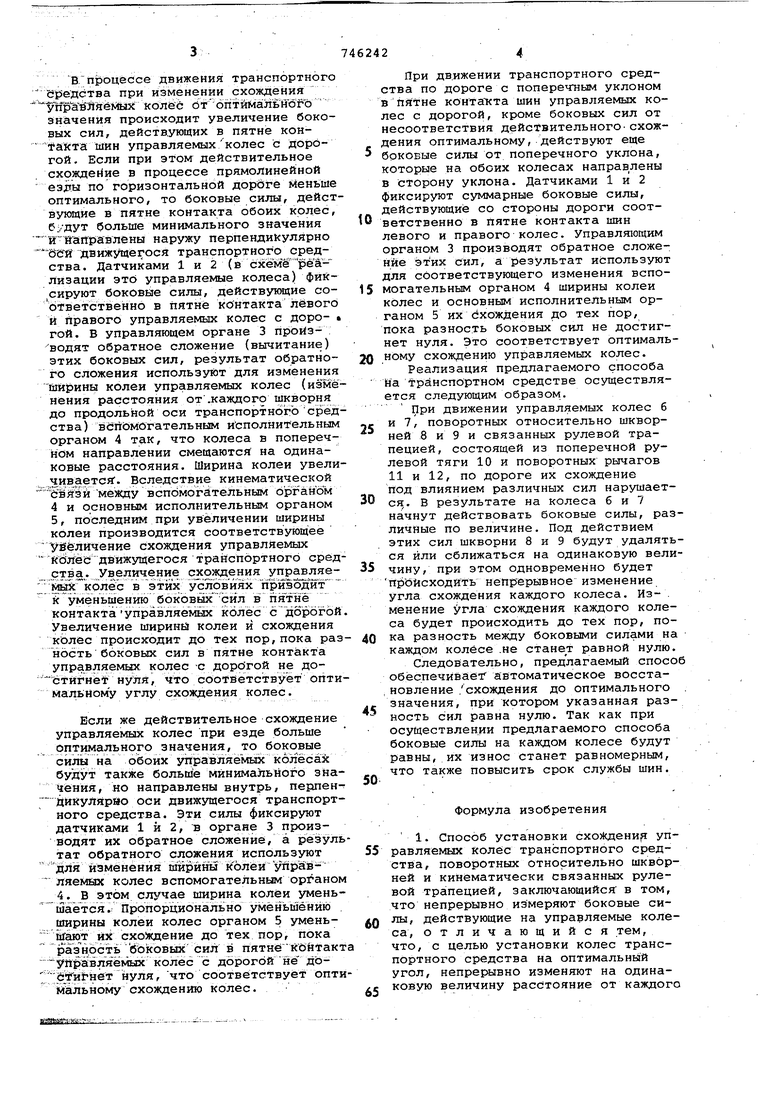
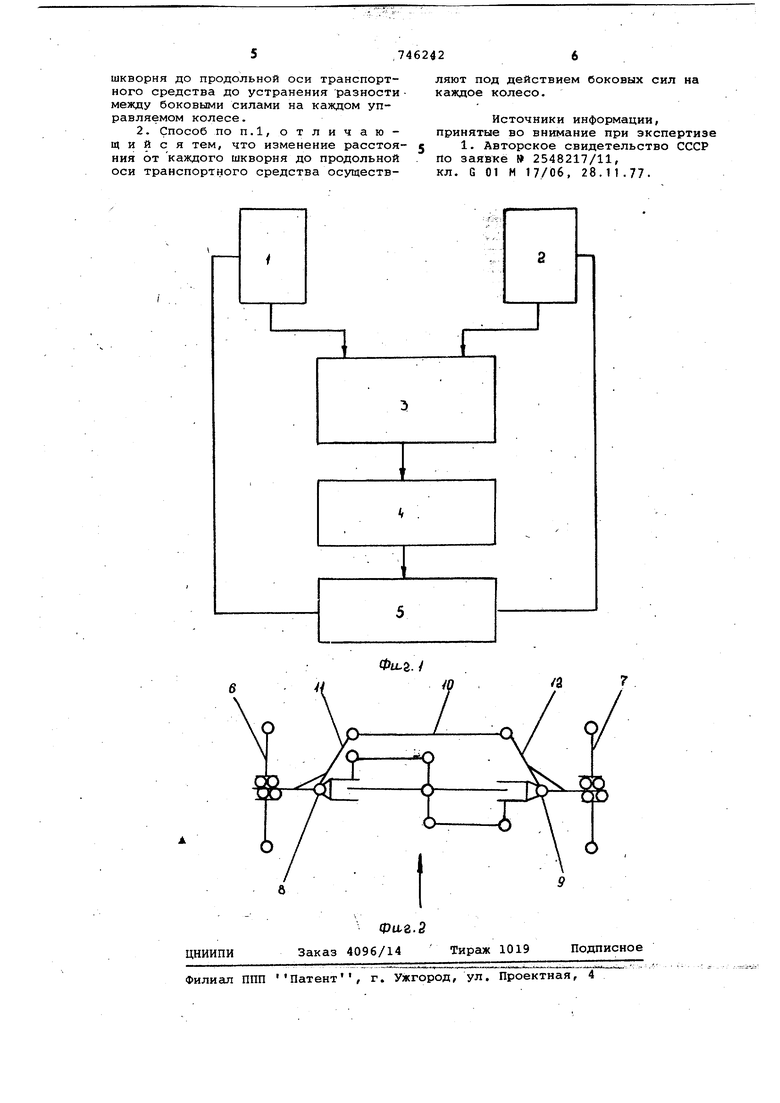
На фиг. 1 приведена схема способа автоматической установки оптимального схождения управляемых колес движущегося транспортного средства; на фиг. 2 - схема реализации предлагаемого способа на транспортном средстве в плане с неразрезной балкой переднего моста.
В, процессе движения транспортного средства при изменении схождения
уТпрЖёЯяёмых колеа от6птймаЙ:ьногЬ значения происходит увеличение боковых сил, действующих в пятне конТаКта шин управляемыхколес с дорогой. Если при этом действительное схождение в процессе прямолинейной езда по горизонтальной дорбге меньше оптимального, то боковые силы, действующие в пятне контакта обоих колес, будут больше минимального значения
И направлены наружу перпендикулярно
бйй движущегося транспортного средства. Датчиками 1 и 2 (в схеме рёа- лизации это управляемые колеса) фиксируют боковые силы, действующие соответственно в пятне контакта левого и ттравого управляемых колес с доро- гой. В управляющем органе 3 пройзводят обратное сложение (вычитание) этих боковых сил, результат обратного сложения используют для изменения Ширины колеи управляемых колес (изменения расстояния от .каждого шкворня до продольной оси транспортногосредства) вспомогательным исполнительным органом 4 так, что колеса в поперечном направлении смещаются на одинаковые расстояния. Ширина колеи увеличива.ется. Вследствие кинематической
ёя&й между вспОмога тельным брганом 4 и основным исполнительным органом 5, последним при увеличении ширины колеи производится соответствующее Уйёли:чение схождения управляемых 1{6лё)й движущегося трайспортногО средства. Ув еличение схождения управляе|МЫХ колес в этих уЪловиях пр иводй т
к уменьшению боковых сил в пятне контактауправляемьк колёс с дорогой. Увеличение ширин а колеи и схождения кОлес происходит до тех пор,пока разность боковых сил в пятне контакта управляемых колес -с дорогой не достйгне нуля, что соотйетствуёт оптимальному углу схождения колес.
Если же действительное схождение управляемых колес при езде больше оптимального значения, то боковые силы наобоих управляемых колёсах будут также больше минимального значения, но направлены внутрь, перпенДйкулйрйо оси движущегося транспортного средства. Эти силы фиксируют датчиками 1 и 2, в органе 3 производят их обратное сложение, а результат обратного сложения используют
для изменения ширины колеи: упрйвляемах колес вспомогательным органом 4. В этом случае ширина колеи уменьшается. Пропорционал:ьно уменьшению ширины колеи колес органом 5 уменьйГают из4 схо5кдение до тех пор, пока разжиреть е5Ьковых сил в Пятне контакта
уп авляёмьпс колёс с дорогой не ДОе и:Ьнет нуля, что соответствует оптимальному схождению колес.
При дв.ижении транспортного средства по дороге с поперечным уклоном впятне конТаТста шин управляемых колес с дорогой, кроме боковых сил от несоответствия действительного- схождения оптимальному, действуют еще боковые силы от поперечного уклона, которые на обоих колесах направлены в сторону уклона. Датчиками 1 и 2 фиксируют суммарные боковые силы, действующие со стороны дороги соответственно в Пятне контакта шин левого и правого колес. Управляющим органом 3 производят обратное сложение этих сил, а результат используют для соответствующего изменения вспомогательным органом 4 ширины колеи колес и основным исполнительным органом 5 их вхождения до тех пор, пока разность боковых сил не достигнет нуля. Это соответствует оптимальному схождению управляемых колес.
Реализация предлагаемого способа на трйнспортном средстве осуществляется следующим образом.
При движении управляемых колес б и 7, поворотных относительно шкворней 8 и 9 и связанных рулевой трапецией, состоящей из поперечной рулевой тяги 10 и поворотных рычагов 11 и 12, по дороге их схождение под влиянием различных сил нарушается. В результате на колеса б и 7 начнут действовать боковые силы, различные по величине. Под действием этих сил шкворни 8 и 9 будут удаляться или сближаться на одинаковую величину, при этом одновременно будет Происходить непрерывное изменение Угла схождения каждого колеса. Из- . менение Угла схождения каждого колеса будет происходить до тех пор, пока разность между боковыми силами на каждом колесе .не станет равной нулю.
Следовательно, предлагаемый спосо обёспечйбает автоматическое восста, новление /схождения до оптимального значения, при котором указанная разность сил равна нулю. Так как при осуществлении предлагаемого способа боковые силы на каждом колесе будут равны, их износ станет равномерным, что также повысить срок службы шин.
Формула изобретения
1. Способ установки схоЗДенир управляемых колес транспортного средства, поворотных относительно шквОрней и кинематически связанных рулевой трапецией, заключающийся: в том, что непрерывно измеряют боковые силы, действующие на управляемые колеса, отличающийся тем, что, с целью установки колес транспортного средства на оптимальный угол, непрерывно изменяют на одинаковую величину расстояние от каждого